
Marine Collision Avoidance Route Planning Model for MASS Based on Domain-Based Predicted Area of Danger

 ,
,  ,
,  and
and
Abstract
1. Introduction
2. Literature Review
3. Marine Collision Avoidance Route Planning Model
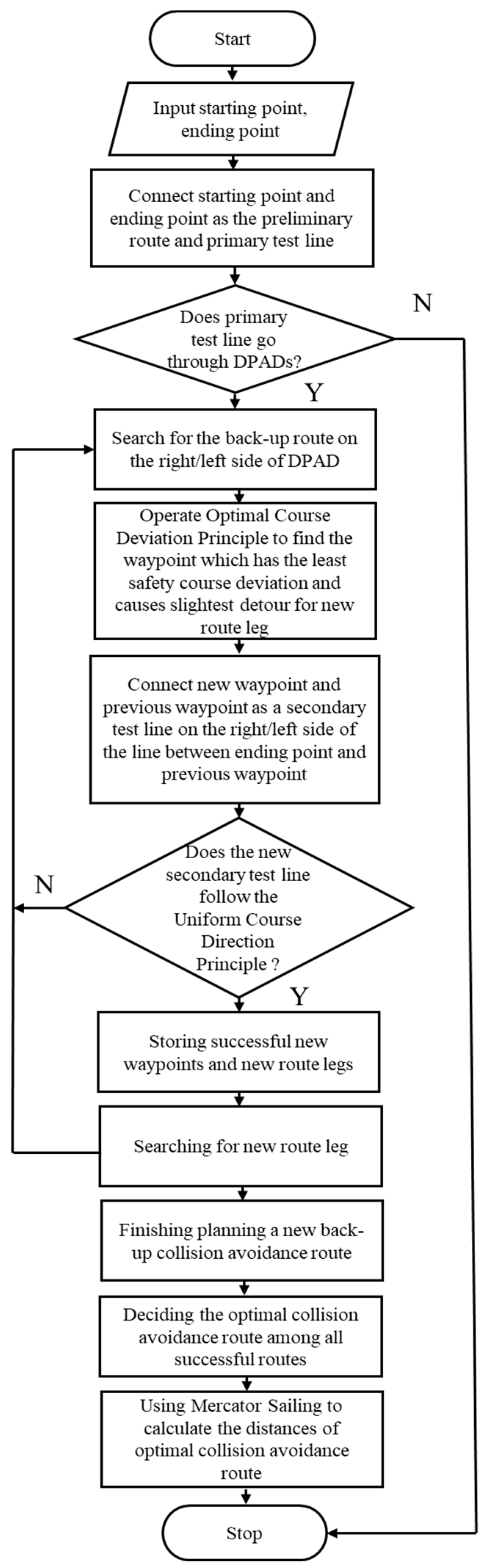
3.1. The Least Course Deviation Model
- (1)
- Step 1:
- (2)
- Step 2:
3.2. Mercator Sailing and Parallel Sailing
- (1)
- Mercator sailing
- (2)
- Parallel sailing
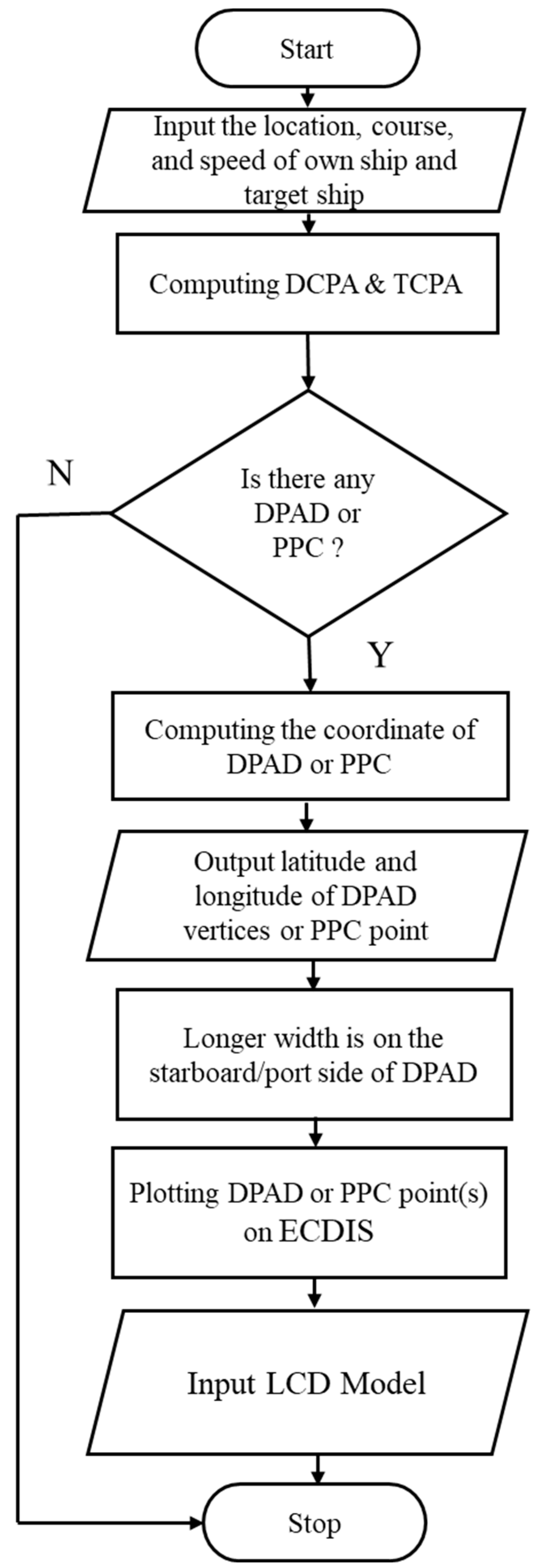
3.3. Domain-Based Predicted Area of Danger
- (1)
- PAD geometric model
- (2)
- DPAD geometric model
- (3)
- Coordinate system and the DPAD mathematical model
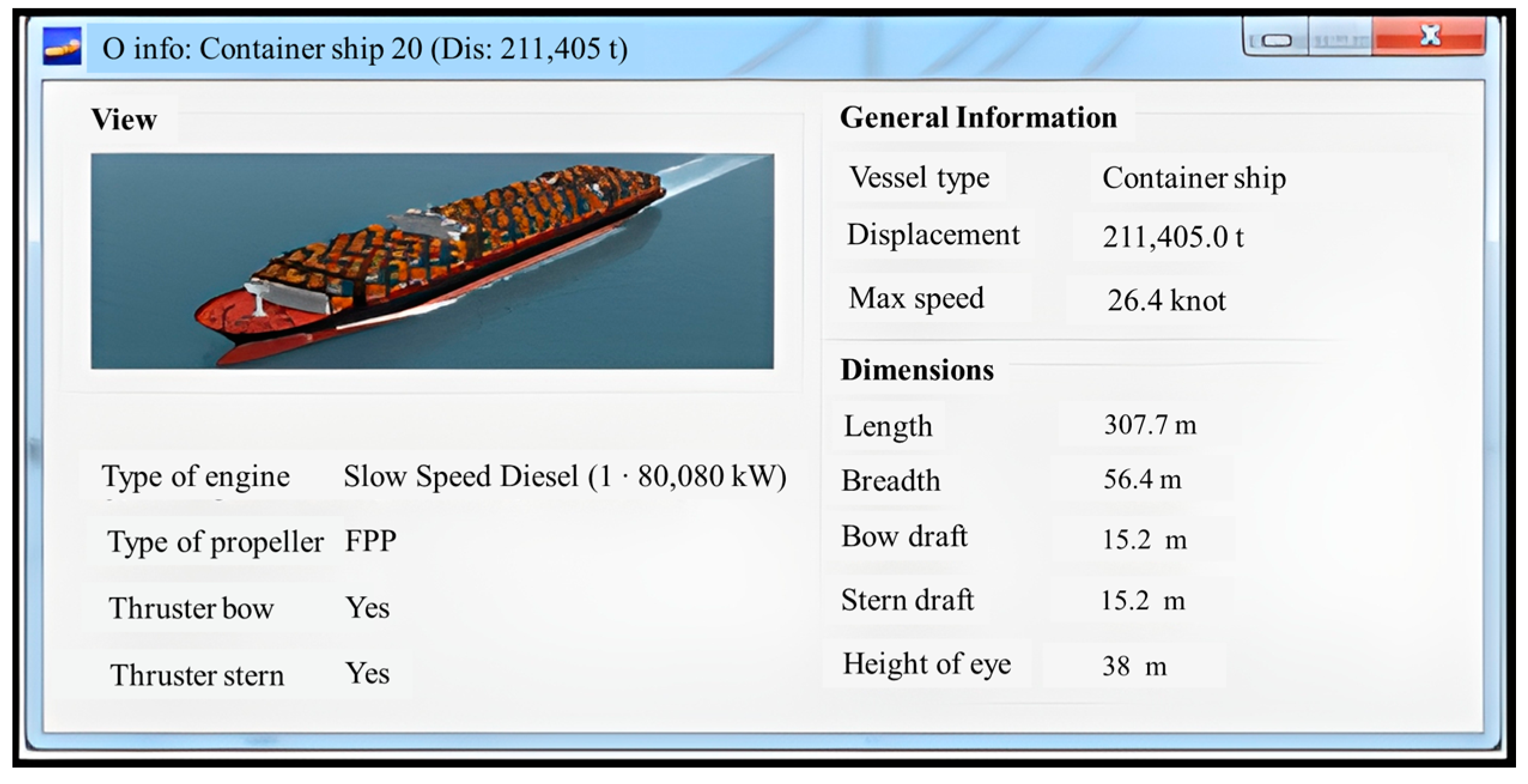
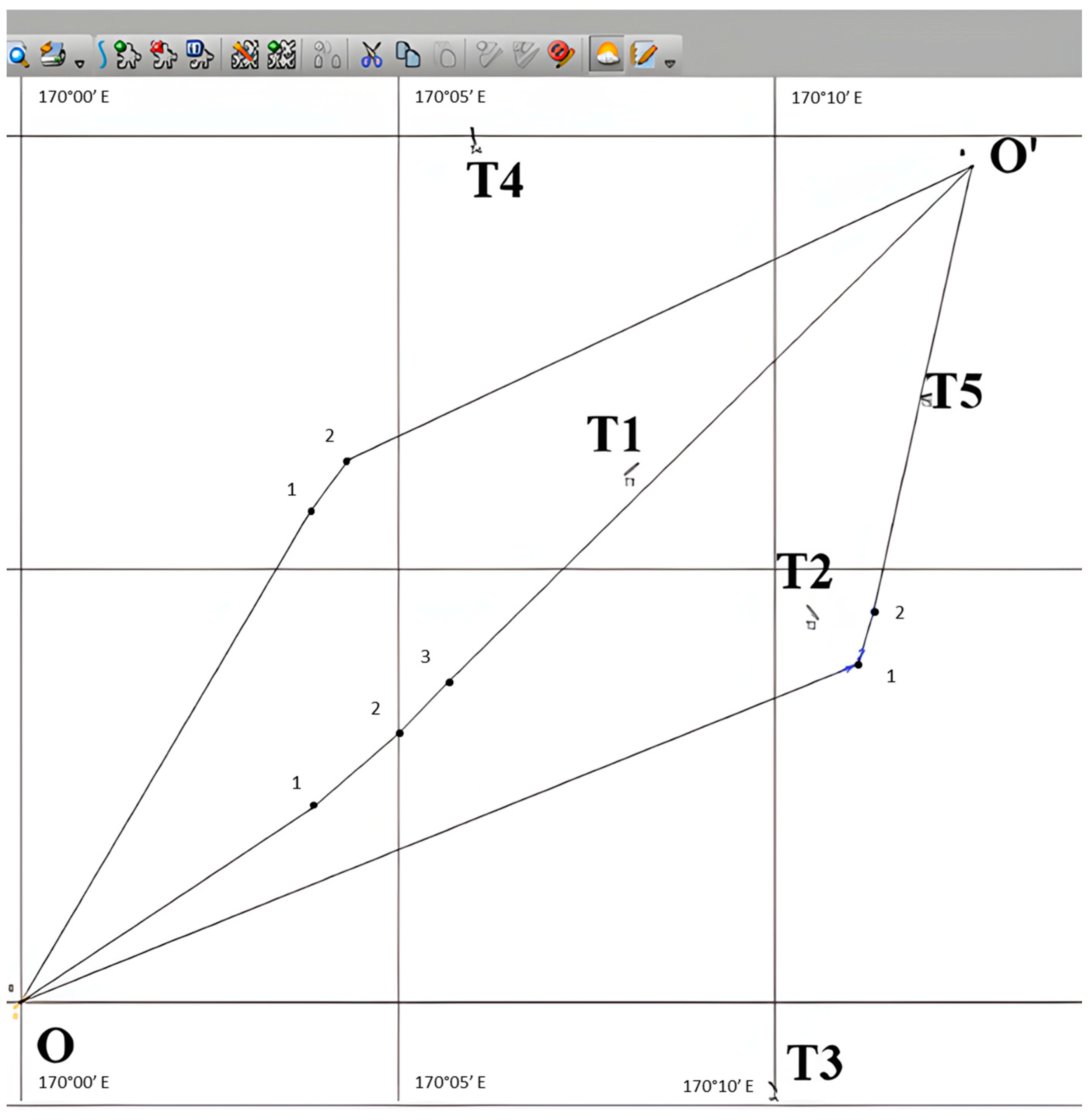
4. Empirical Analysis: Six-Ship Encountering Scenario
5. Conclusions
6. Suggestions for Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ARPA | automatic radar plotting aids |
| ECDIS | Electronic Chart Display and Information System |
| CPA | closest point of approach |
| TCPA | time to closest point of approach |
| DCPA | distance at closest point of approach |
| ENC | electronic navigation chart |
| AIS | automatic identification system |
| OOW | officer on watch |
| IMO | International Maritime Organization |
| PPC | possible point of collision |
| MBR | minimum bounding rectangle |
| MCARP | marine collision avoidance route planning |
| MASS | Maritime Autonomous Surface Ships |
| PAD | predicted area of danger |
| DPAD | domain-based predicted area of danger |
| COLREG | International Regulations for Preventing Collisions at Sea |
| PID | proportion-integral-derivative |
| ACAS | automatic collision avoidance system |
| ACA | ant colony algorithm |
| PSO | particle swarm optimization |
| LCD | least course deviation |
| LOC | least off course |
| GA | genetic algorithm |
| COG and SOG | course over ground and speed over ground, respectively |
References
- EMSA. European Maritime Safety Agency: Annual Overview of Marine Casualties and Incidents 2022. Incident, 20 July 2023. [Google Scholar]
- Sánchez-Beaskoetxea, J.; Basterretxea-Iribar, I.; Sotés, I.; Machado, M.d.l.M.M. Human error in marine accidents: Is the crew normally to blame? Marit. Transp. Res. 2021, 2, 100016. [Google Scholar] [CrossRef]
- Perera, L.P.; Oliveira, P.; Soares, C.G. Maritime traffic monitoring based on vessel detection, tracking, state estimation, and trajectory prediction. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1188–1200. [Google Scholar] [CrossRef]
- Weintrit, A. The Electronic Chart Display and Information System (ECDIS): An Operational Handbook; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Mou, J.M.; Van der Tak, C.; Ligteringen, H. Study on collision avoidance in busy waterways by using AIS data. Ocean. Eng. 2010, 37, 483–490. [Google Scholar] [CrossRef]
- Sotiralis, P.; Ventikos, N.P.; Hamann, R.; Golyshev, P.; Teixeira, A. Incorporation of human factors into ship collision risk models focusing on human centred design aspects. Reliab. Eng. Syst. Saf. 2016, 156, 210–227. [Google Scholar] [CrossRef]
- Shen, H.; Hashimoto, H.; Matsuda, A.; Taniguchi, Y.; Terada, D.; Guo, C. Automatic collision avoidance of multiple ships based on deep Q-learning. Appl. Ocean. Res. 2019, 86, 268–288. [Google Scholar] [CrossRef]
- Tsou, M.-C. Multi-target collision avoidance route planning under an ECDIS framework. Ocean. Eng. 2016, 121, 268–278. [Google Scholar] [CrossRef]
- Veitch, E.; Alsos, O.A. A systematic review of human-AI interaction in autonomous ship systems. Saf. Sci. 2022, 152, 105778. [Google Scholar] [CrossRef]
- Kim, T.; Mallam, S. A Delphi-AHP study on STCW leadership competence in the age of autonomous maritime operations. WMU J. Marit. Aff. 2020, 19, 163–181. [Google Scholar] [CrossRef]
- Kim, D.; Kim, J.-S.; Kim, J.-H.; Im, N.-K. Development of ship collision avoidance system and sea trial test for autonomous ship. Ocean. Eng. 2022, 266, 113120. [Google Scholar] [CrossRef]
- Fan, C.; Montewka, J.; Zhang, D. A risk comparison framework for autonomous ships navigation. Reliab. Eng. Syst. Saf. 2022, 226, 108709. [Google Scholar] [CrossRef]
- Wang, N.; Meng, X.; Xu, Q.; Wang, Z. A unified analytical framework for ship domains. J. Navig. 2009, 62, 643–655. [Google Scholar] [CrossRef]
- Goodwin, E.M. A statistical study of ship domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef]
- Davis, P.; Dove, M.; Stockel, C. A computer simulation of marine traffic using domains and arenas. J. Navig. 1980, 33, 215–222. [Google Scholar] [CrossRef]
- Riggs, R.F.; O’Sullivan, J.P. An analysis of the point of possible collision. J. Navig. 1980, 33, 259–283. [Google Scholar] [CrossRef]
- Zhao-lin, W. Analysis of Radar PAD Information and a Suggestion to Reshape the PAD. J. Navig. 1988, 41, 124–129. [Google Scholar] [CrossRef]
- Li, X. A Geometrical Collision Avoidance Study Based on AIS Information and Ship Domain. Master’s Thesis, Shanghai Maritime University, Shanghai, China, 2006. [Google Scholar]
- Szłapczyński, R.; Śmierzchalski, R. Supporting navigator’s decisions by visualizing ship collision risk. Pol. Marit. Res. 2009, 16, 83–88. [Google Scholar] [CrossRef][Green Version]
- Tsou, M.-C. Integration of a geographic information system and evolutionary computation for automatic routing in coastal navigation. J. Navig. 2010, 63, 323–341. [Google Scholar] [CrossRef]
- He, Y.; Li, Z.; Mou, J.; Hu, W.; Li, L.; Wang, B. Collision-avoidance path planning for multi-ship encounters considering ship manoeuvrability and COLREGs. Transp. Saf. Environ. 2021, 3, 103–113. [Google Scholar] [CrossRef]
- Tsou, M.-C.; Hsueh, C.-K. The study of ship collision avoidance route planning by ant colony algorithm. J. Mar. Sci. Technol. 2010, 18, 16. [Google Scholar] [CrossRef]
- Xia, G.; Han, Z.; Zhao, B.; Wang, X. Local path planning for unmanned surface vehicle collision avoidance based on modified quantum particle swarm optimization. Complexity 2020, 2020, 3095426. [Google Scholar] [CrossRef]
- Tam, C.; Bucknall, R.; Greig, A. Review of collision avoidance and path planning methods for ships in close range encounters. J. Navig. 2009, 62, 455–476. [Google Scholar] [CrossRef]
- He, Z.; Liu, C.; Chu, X.; Negenborn, R.R.; Wu, Q. Dynamic anti-collision A-star algorithm for multi-ship encounter situations. Appl. Ocean. Res. 2022, 118, 102995. [Google Scholar] [CrossRef]
- Zhai, P.; Zhang, Y.; Shaobo, W. Intelligent ship collision avoidance algorithm based on DDQN with prioritized experience replay under COLREGs. J. Mar. Sci. Eng. 2022, 10, 585. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. A target information display for visualising collision avoidance manoeuvres in various visibility conditions. J. Navig. 2015, 68, 1041–1055. [Google Scholar] [CrossRef]
- Cairns, W.R. AIS and long range identification & tracking. J. Navig. 2005, 58, 181–189. [Google Scholar]
- Lin, B.; Huang, C.-H. Comparison between ARPA radar and AIS characteristics for vessel traffic services. J. Mar. Sci. Technol. 2006, 14, 7. [Google Scholar] [CrossRef]
- Smeaton, G.; Dineley, W.; Tucker, S. Display requirements for ECDIS/ARPA overlay systems. J. Navig. 1995, 48, 13–28. [Google Scholar] [CrossRef]
- Chuang, Y.-L. Construction and Development of a Route Planning Model for Obstacle Avoidance and Collision Prevention in Coastal Navigation based on ECDIS. Master’s Thesis, National Taiwan Ocean University, Taiwan, China, 2019. [Google Scholar]
- NTOU. Parallel Sailing. Available online: http://meda.ntou.edu.tw/martran/?t=3&i=0009 (accessed on 15 July 2023).
- NTOU. NTOU Maritime Development and Training Center. Available online: http://www.stc.ntou.edu.tw/about/ (accessed on 1 July 2023).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Degree Level | Level of Automation | OOW Intervention | Role of the OOW |
|---|---|---|---|
| 1 | Automated processes | Yes | Supervision and operation |
| 2 | Remote controlling with seafarers | Yes | Supervision and remote controlling |
| 3 | Remote controlling without seafarers | No | Remote controlling and monitoring |
| 4 | Fully autonomous | No | Remote monitoring and emergency management |
| Ships | Latitude | Longitude | COG | SOG |
|---|---|---|---|---|
| T1 | 25°06.20′ N | 170°08.10′ E | 230° | 20 kts |
| T2 | 25°04.50′ N | 170°10.50′ E | 140° | 0 kts |
| T3 | 24°59.00′ N | 170°10.00′ E | 320° | 24 kts |
| T4 | 25°10.00′ N | 170°06.00′ E | 170° | 18 kts |
| T5 | 25°07.00′ N | 170°12.00′ E | 260° | 15 kts |
| Waypoint Name | Route | Latitude | Longitude | C | COG | Dist. | T_Dist. |
|---|---|---|---|---|---|---|---|
| O | 1 | 25°00.00′ N | 170°00.00′ E | N32.4° E | 32.4° | 0 | 0 |
| P1 | 1 | 25°05.60′ N | 170°03.90′ E | N34.8° E | 34.8° | 6.63 nm | 6.63 nm |
| P2 | 1 | 25°06.30′ N | 170°04.40′ E | N65.9° E | 65.9° | 0.85 nm | 7.48 nm |
| O’ | 1 | 25°09.64′ N | 170°12.61′ E | N/A | N/A | 8.07 nm | 15.56 nm |
| O | 2 | 25°00.00′ N | 170°00.00′ E | N57.9° E | 57.9° | 0 | 0 |
| P3 | 2 | 25°02.20′ N | 170°03.90′ E | N49.1° E | 49.1° | 4.13 nm | 4.13 nm |
| P4 | 2 | 25°03.10′ N | 170°05.00′ E | N43.1° E | 43.1° | 1.38 nm | 5.51 nm |
| P5 | 2 | 25°03.70′ N | 170°05.60′ E | N47.3° E | 47.3° | 0.82 nm | 6.33 nm |
| O’ | 2 | 25°09.64′ N | 170°12.61′ E | N/A | N/A | 8.71 nm | 15.04 nm |
| O | 3 | 25°00.00′ N | 170°00.00′ E | N68.9° E | 68.9° | 0 | 0 |
| P6 | 3 | 25°03.90′ N | 170°11.10′ E | N16.9° E | 16.9° | 10.84 nm | 10.84 nm |
| P7 | 3 | 25°04.50′ N | 170°11.30′ E | N13.9° E | 13.9° | 0.63 nm | 11.47 nm |
| O’ | 3 | 25°09.64′ N | 170°12.61′ E | N/A | N/A | 5.25 nm | 16.72 nm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.-W.; Hsueh, C.-K.; Chuang, Y.-L.; Lai, C.-M.; Yang, F.-S. Marine Collision Avoidance Route Planning Model for MASS Based on Domain-Based Predicted Area of Danger. J. Mar. Sci. Eng. 2023, 11, 1724. https://doi.org/10.3390/jmse11091724
Lu C-W, Hsueh C-K, Chuang Y-L, Lai C-M, Yang F-S. Marine Collision Avoidance Route Planning Model for MASS Based on Domain-Based Predicted Area of Danger. Journal of Marine Science and Engineering. 2023; 11(9):1724. https://doi.org/10.3390/jmse11091724
Chicago/Turabian StyleLu, Chao-Wei, Chao-Kuang Hsueh, Yung-Lin Chuang, Ching-Ming Lai, and Fuh-Shyong Yang. 2023. "Marine Collision Avoidance Route Planning Model for MASS Based on Domain-Based Predicted Area of Danger" Journal of Marine Science and Engineering 11, no. 9: 1724. https://doi.org/10.3390/jmse11091724
APA StyleLu, C.-W., Hsueh, C.-K., Chuang, Y.-L., Lai, C.-M., & Yang, F.-S. (2023). Marine Collision Avoidance Route Planning Model for MASS Based on Domain-Based Predicted Area of Danger. Journal of Marine Science and Engineering, 11(9), 1724. https://doi.org/10.3390/jmse11091724