1. Introduction
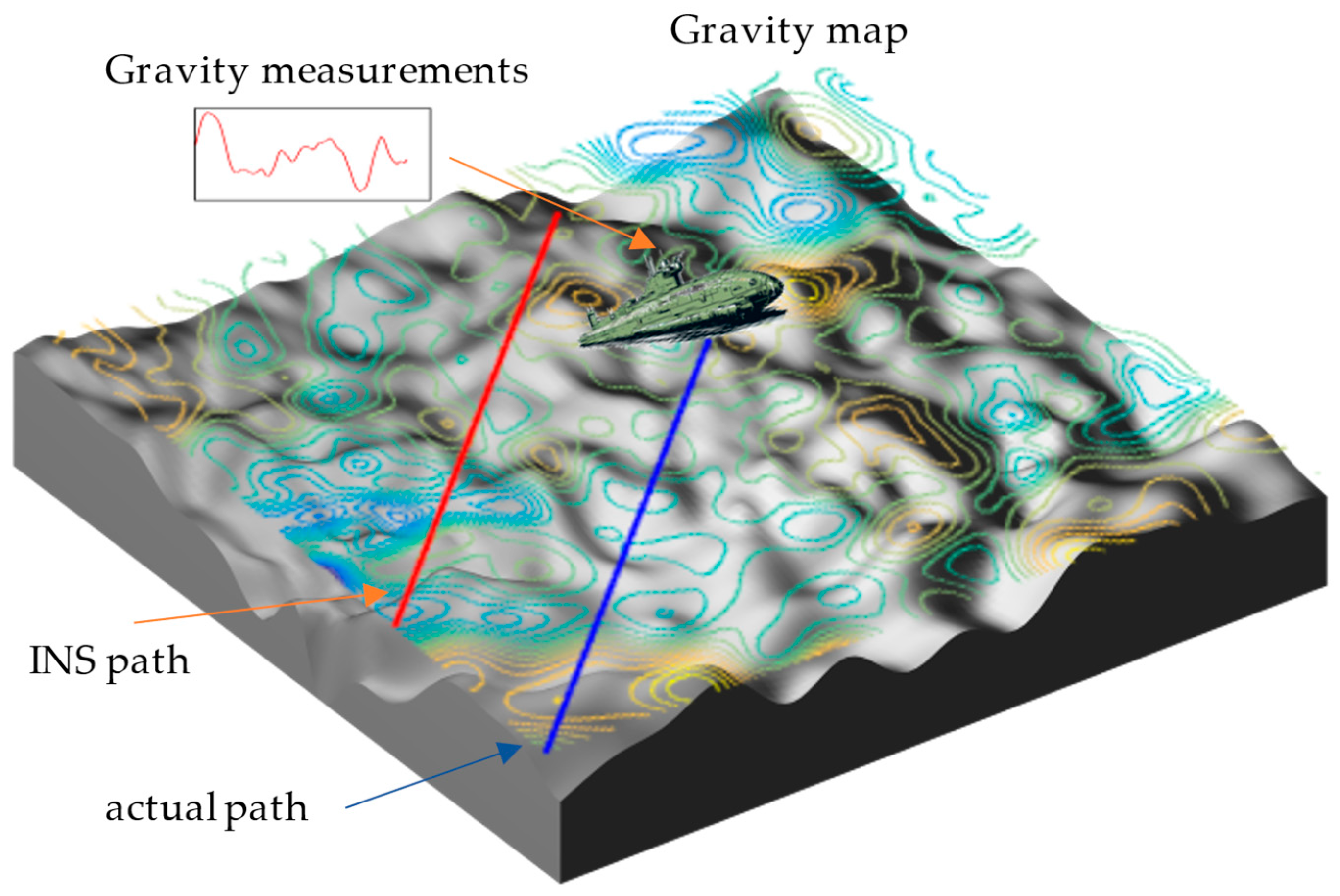
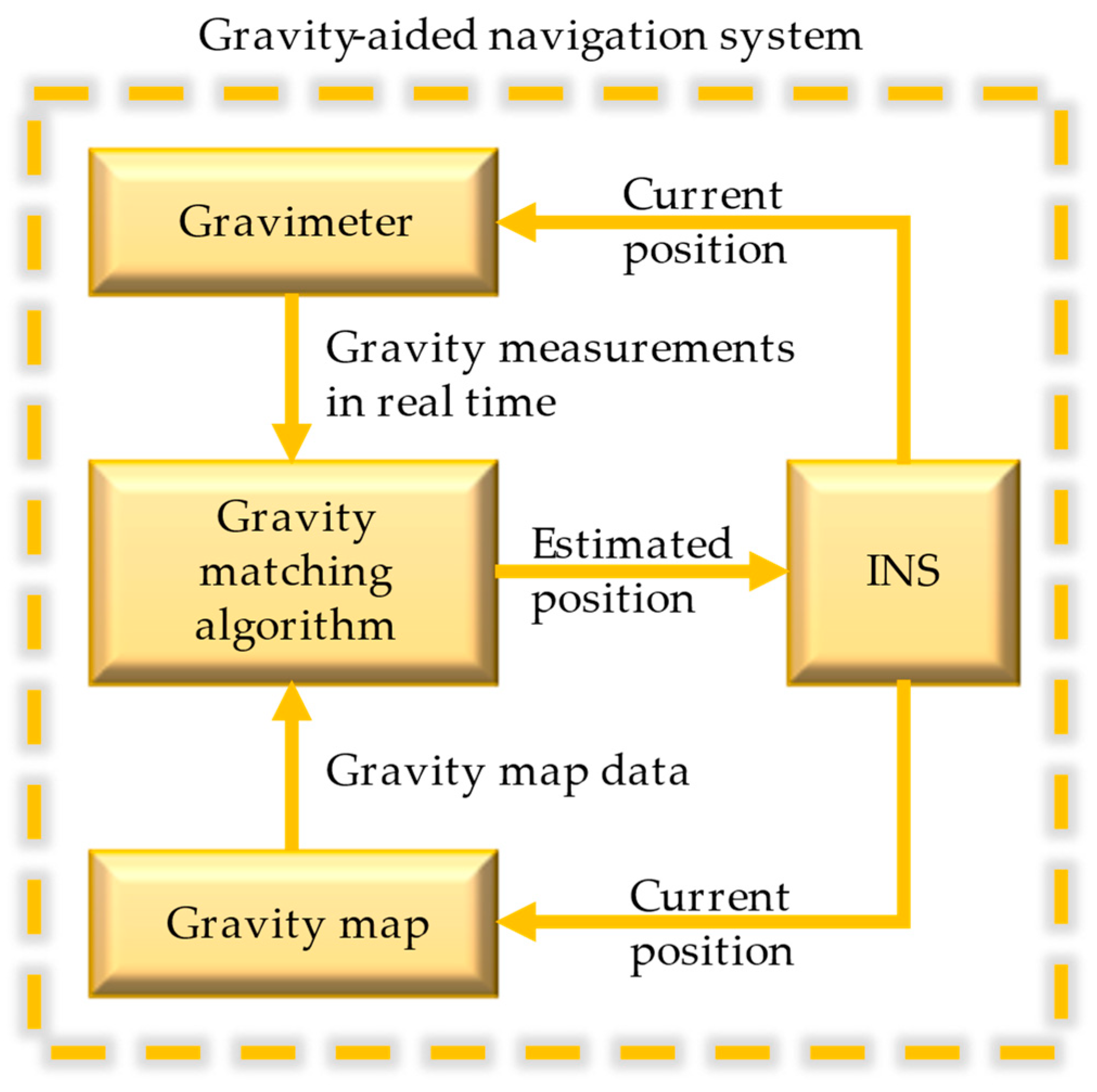
Gravity-aided navigation, which utilizes geophysical field information, has attracted significant attention from scholars both domestically and abroad due to its high autonomy and passive concealment features. Key technologies of this navigation system include the pre-production of large-scale high-precision gravity maps, real-time gravity anomaly measurement, and gravity matching algorithms. The basic principle involves utilizing real-time gravity anomaly measurements to locate the carrier position in a known gravity map through the gravity matching algorithm and correcting the position of the inertial navigation system (INS). This approach is applicable to submarine navigation where external radiation information is not available, and can effectively reduce the accumulated error of the INS, ensuring long-term navigation accuracy of the carrier [
1].
The performance of gravity-aided navigation is influenced by the characteristics of the gravity field distribution, and for gravity matching algorithms to achieve precise positioning, they require regions with evident gravity field features [
2]. Scholars have proposed several evaluation criteria for gravity field regions based on the gravity field’s characteristic parameters [
3]. Simulation experiments have demonstrated that conducting gravity navigation within adaptive regions significantly improves navigation accuracy [
4]. Cai [
5] employed the Analytic Hierarchy Process to combine multiple features and obtain gravity field adaptation criteria. In [
6], a method was proposed to calculate local gravity features using a moving window and introduce a fast Euclidean distance field algorithm to generate locally adaptive regions. Additionally, Ma [
7] introduced an adaptive region selection method based on feature parameter information entropy. These studies have provided methods for partitioning the gravity field to identify regions with prominent features suitable for gravity matching. Even within the adaptive regions, different gravity matching algorithms exhibit distinct positioning effects. Therefore, depending on the characteristics of the matching algorithms, appropriate algorithms can be selected for navigation in regions with different gravity field characteristics [
8].
Currently, there are two main categories of gravity navigation algorithms based on their characteristics: sequential-based matching algorithms, such as Terrain Contour Matching (TERCOM) and Iterative Closest Contour Point (ICCP) [
9,
10], and iterative-based filter-recursive algorithms, such as Sandia Inertial Terrain-Aided Navigation (SITAN) [
11] and Particle Filter (PF) [
12]. In pursuit of better applications in gravity-aided navigation, numerous scholars have made improvements to existing algorithms or proposed novel ones by integrating artificial intelligence [
13,
14,
15]. Zhao [
16] considered both gravity measurements and their variation characteristics, enhancing the acquisition method of trajectory points, and optimizing the accuracy and robustness of the PF algorithm. Ouyang [
17] analyzed various factors influencing gravity matching navigation results, combining PSO and PF to mitigate the impact of initial registration errors on subsequent particle filtering, thereby enhancing particle filtering navigation accuracy. Mao [
18] utilized INS latitude information to decompose gravity anomalies, proposing the V-ICCP and V-TERCOM methods, which averaged a 10% increase in the matching efficiency of the ICCP algorithm. Wang [
19] addressed the model error in the state equation of the SITAN algorithm by proposing an adaptive parallel extended Kalman filter-based SITAN algorithm, suppressing filter divergence through adaptive factor-adjusted weights for state prediction information. Different gravity field characteristics and gravity measurement noise can affect the positioning performance of matching algorithms, necessitating the development of noise-resistant and stable gravity matching algorithms [
20].
However, these individual methods have certain limitations, and therefore many scholars have proposed ways to combine different types of methods for gravity navigation. For example, Luo [
21] proposed a combined the Extended Kalman Filter (EKF) and the PF that completes the gravity matching process in the first layer of filtering and ensures real-time performance in the second layer. Han [
22,
23] combined the ICCP with the PF and performed an iterative isochronous transformation based on the PF matching results through a two-step calculation. Wei [
24] added a weight-based iterative technique to the SITAN using the principles of the TERCOM to reduce the coarse errors in the results of the SITAN. These studies demonstrate that the joint use of multiple methods for gravity navigation can improve the noise immunity and stability of the gravity matching algorithm, resulting in higher positioning accuracy.
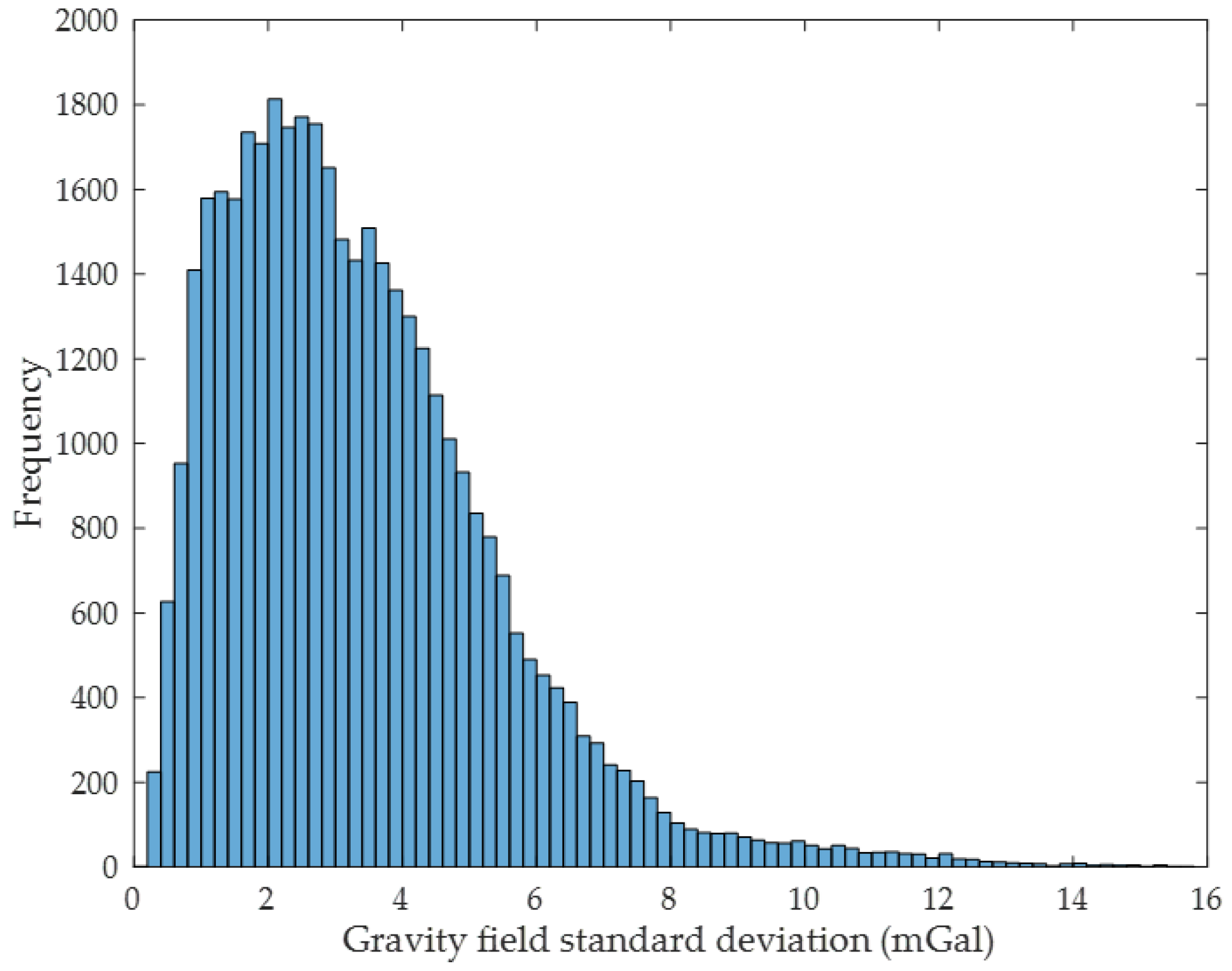
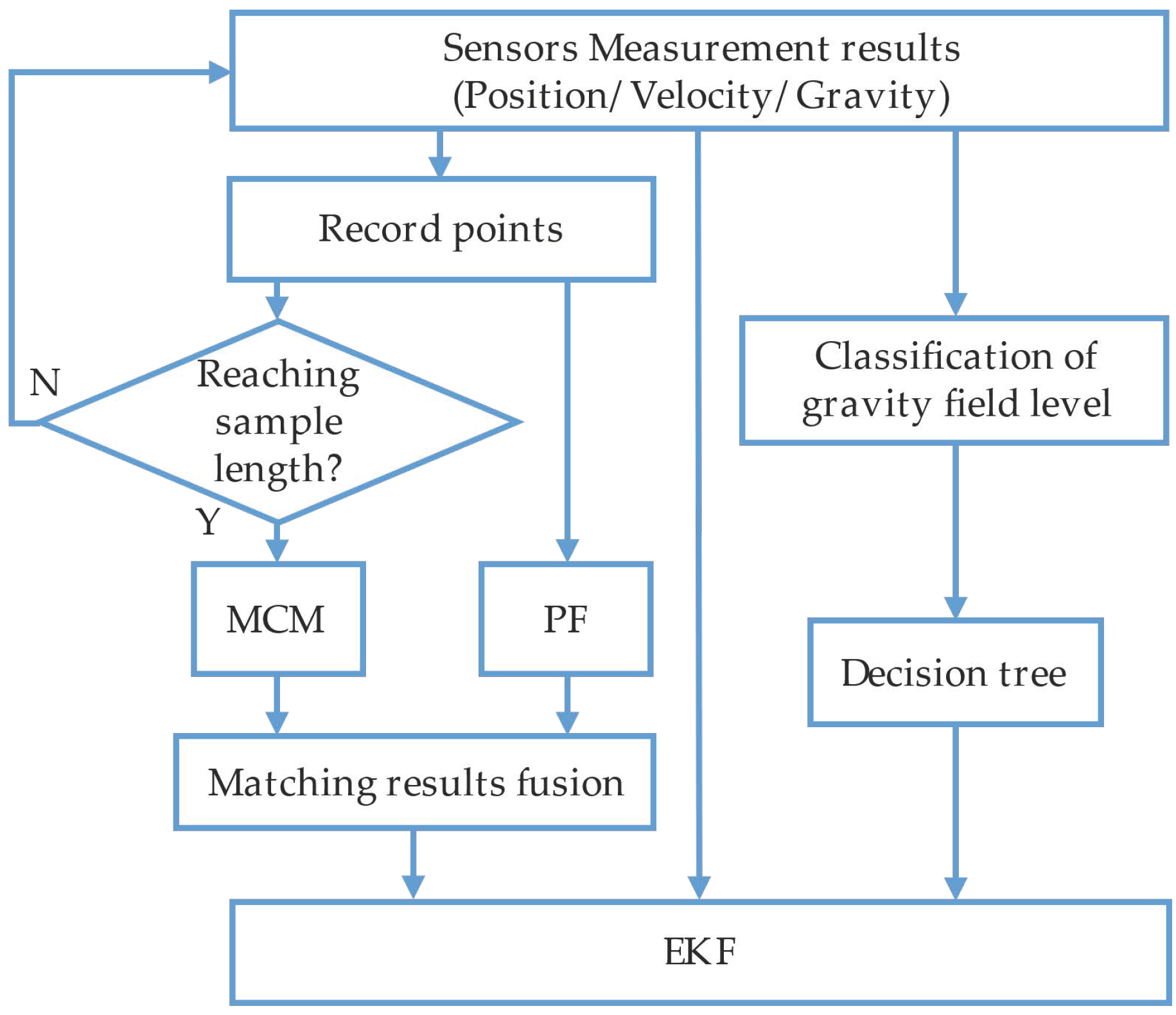
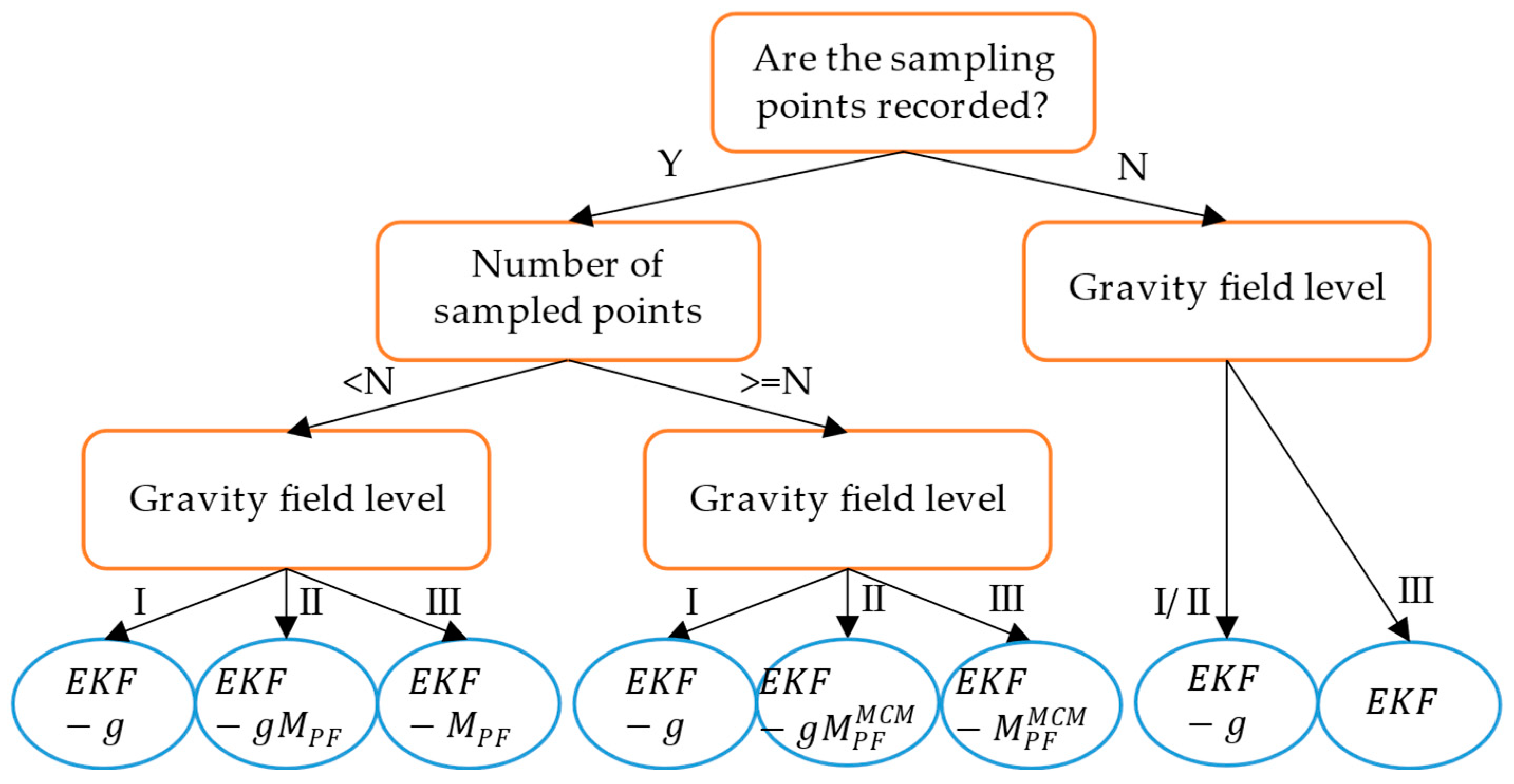
Therefore, this paper proposes a parallel multiple methods with adaptative decision making for gravity-aided navigation. Before navigation, the local standard deviation of the gravity map used for navigation is computed to derive a threshold value for level classification of each gravity field region. During the voyage, the algorithm calculates the gravity field standard deviation of the grid in which the carrier is located, and determines the current gravity field level based on the threshold. The algorithm then uses the EKF as the main component in conjunction with the decision tree established in this paper and adaptively incorporates the matching results of the PF and the maximum correlation method (MCM) into the EKF observation equation.
The structure of the paper is as follows.
Section 2 is divided into two parts, with the first part providing an overview of the EKF, the PF, and the MCM employed in this study. The second part presents the adaptive selection method for calculating the gravity field level classification threshold and the matching algorithm proposed in this paper. In
Section 3, the first part shows the calculation of the threshold parameters for each region in the gravity map using the proposed threshold selection method. The second part presents the results of comparative experiments to validate the improvements in navigation accuracy and long-term stability of the proposed algorithm over traditional methods. Finally, the paper concludes with a summary of the findings and suggestions for further optimization of the proposed method and future research directions.
3. Experiment and Results
The experimental data used in this study were obtained from actual navigation measurements conducted in a certain sea area of China. The carrier is equipped with a laser INS, DVL, and gravimeter. The stability of the gyroscope zero bias in the INS is , with a random walk of , and the accelerometer bias is less than 5 mg. The position update frequency of INS is 1 Hz. The velocity measurement accuracy of the DVL is and data output frequency of 1 Hz. The gravity meter achieves a continuous measurement accuracy of better than 1.5 mGal at sea, with a gravity anomaly data output frequency of 1 Hz. The GPS receiver records the real-time position of the carrier, which is used to evaluate the navigation accuracy of the gravity matching algorithm. The vessel’s average sailing speed is 6.7 m/s, and the duration of the entire experimental data used in the study is approximately 97 h. By employing an ARM-based hardware platform to achieve real-time emulation of sensor data streams, this paper accomplished a semi-physical simulation of gravity-aided navigation within an underwater gravity measurement and processing platform based on OMAP138.
3.1. Gravity Field Classification
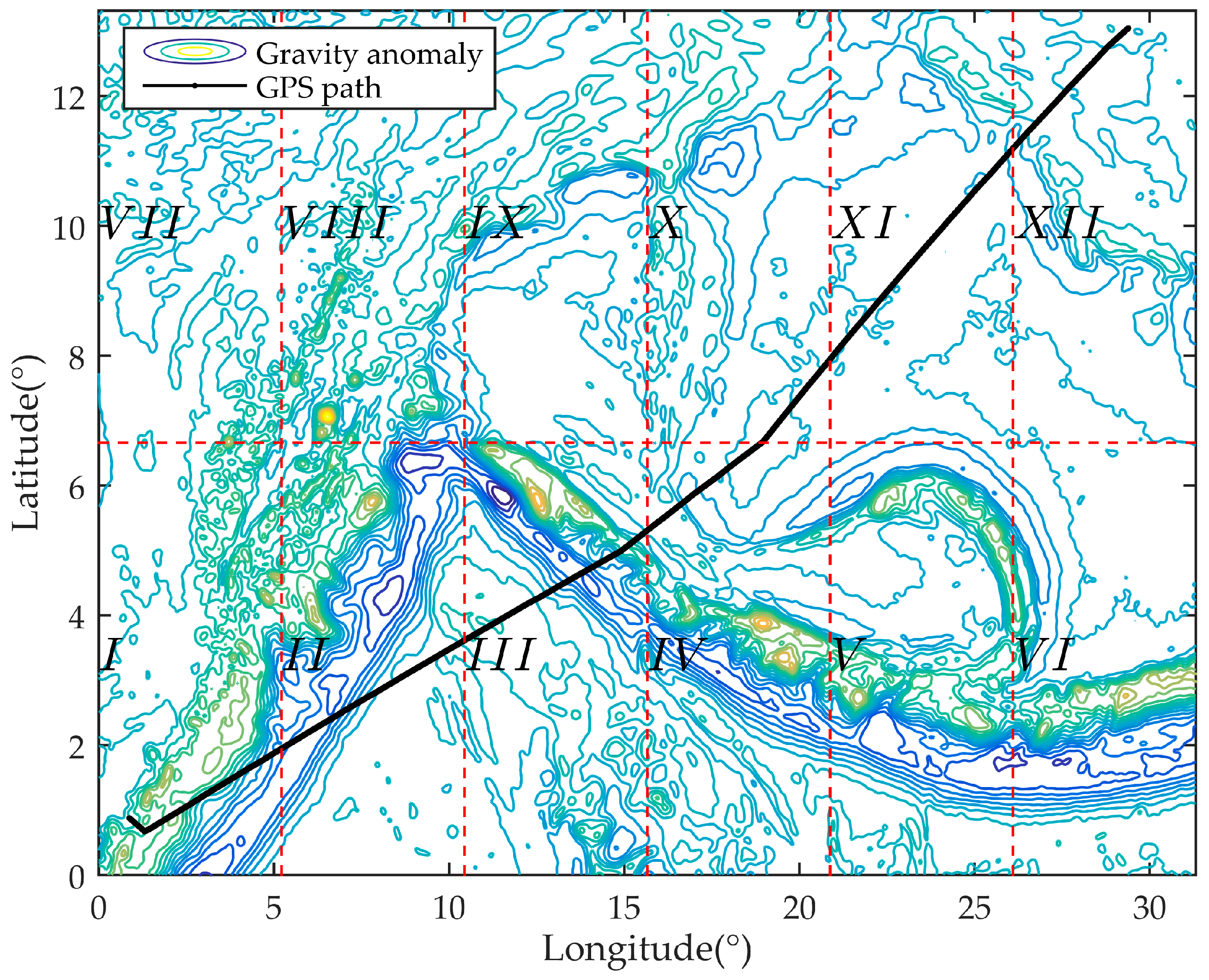
The gravity map utilized in this experiment is derived from satellite altimetry inversion and exhibits a resolution of 1′ × 1′. The map encompasses a latitude range of 13.3° and a longitude range of 31.3°, with the maximum gravity anomaly value reaching 451.047 mGal, while the minimum value stands at −283.4 mGal.
Figure 6 visually presents the gravity map employed in the experiment, accompanied by the GPS trajectory depicting the carrier’s navigation path.
In order to minimize computational load, the gravity map is partitioned into twelve regions and labeled sequentially, as depicted in
Figure 6. For each region, upper and lower thresholds are separately calculated using the gravity field classification method proposed in this paper. The standard deviation calculation is performed using a 5 × 5 grid, with
is 90% of the gravity field selected as level II. The computation results for the upper threshold
and the lower threshold
of each gravity field are presented in
Table 2.
From
Figure 6, it is evident that the trajectory traverses through seven regions:
,
,
,
,
,
, and
. Referring to the data in
Table 2, it is noteworthy that the
for the first four regions are considerably higher compared to the other three regions. In regions where the standard deviation of the gravity field falls below the
, the gravity field exhibits minor fluctuations and less pronounced characteristics, making it unsuitable for gravity matching calculations using the PF and the MCM methods. Conversely, in regions surpassing the
, the gravity anomaly experiences significant fluctuations, and the gravity field characteristics become more prominent. However, there is a higher probability of encountering substantial noise in the gravity anomaly measurements. Therefore, it is not advisable to utilize these measurements for position correction in the EKF algorithm.
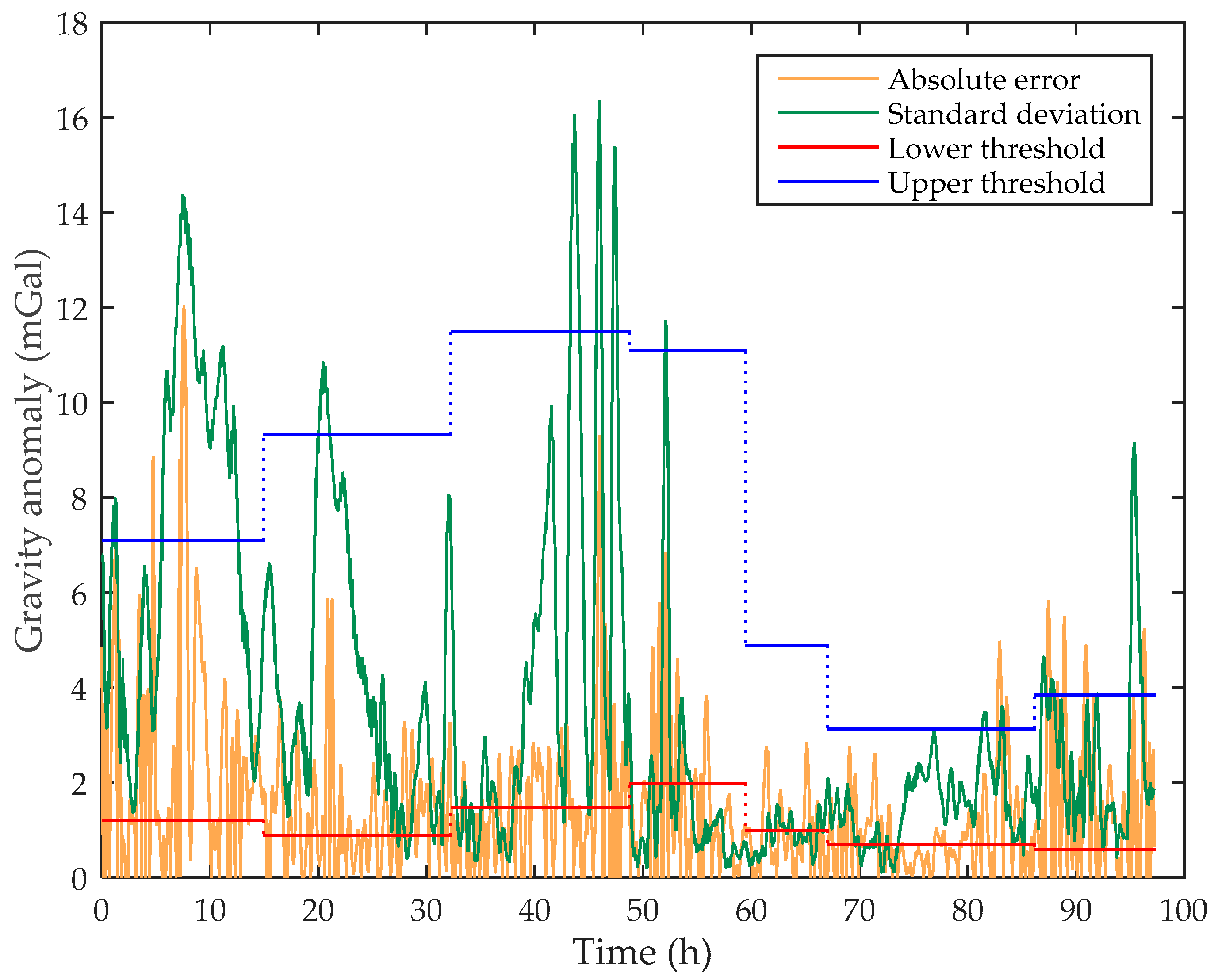
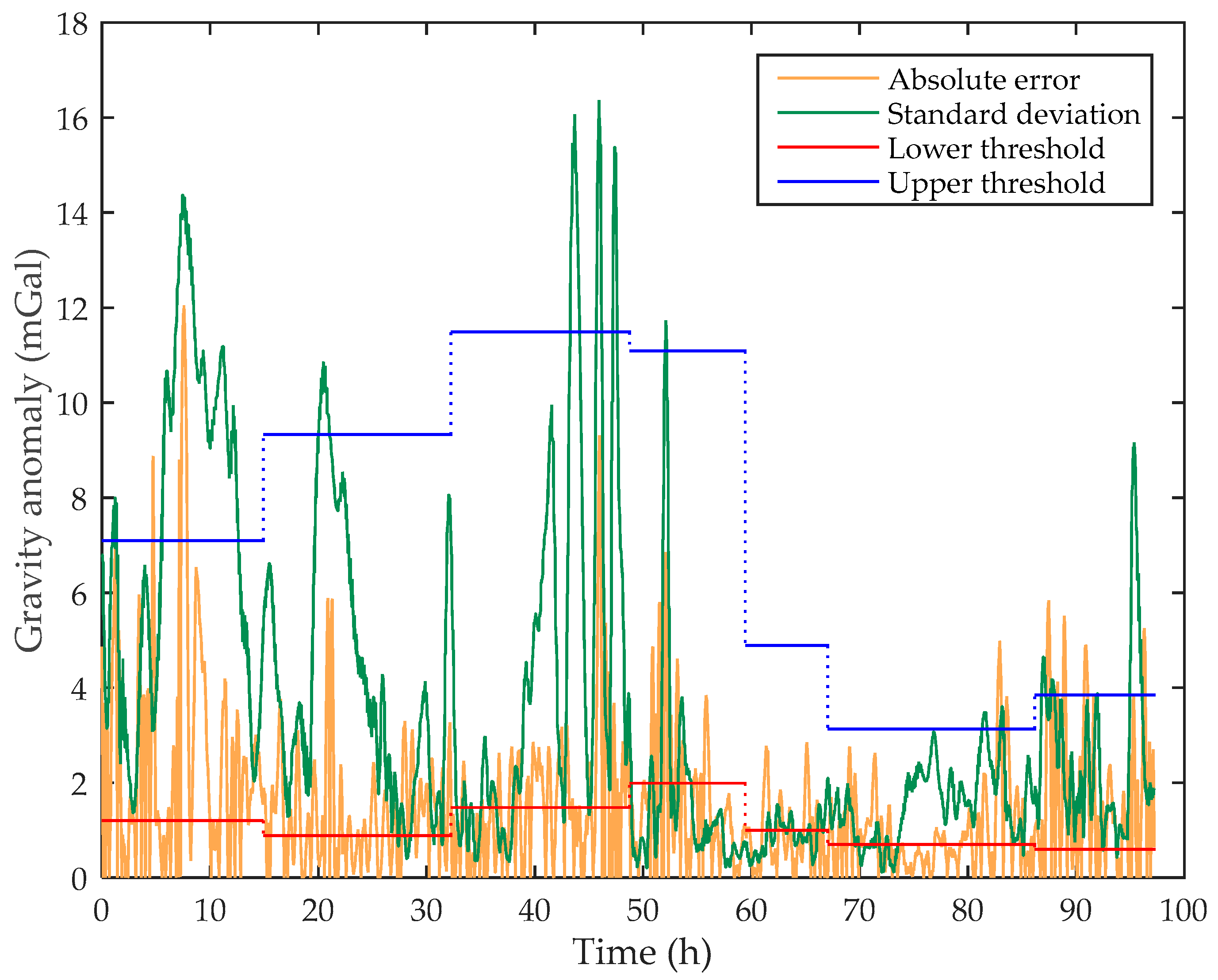
The measurement noise of gravity anomalies is related to the standard deviation of the gravity field. In this paper, the classification of gravity fields is employed to identify regions that may exhibit significant measurement errors, allowing for the selection of appropriate gravity matching algorithms. When the carrier is located in grid cells classified as Class III gravity fields, larger measurement errors are prone to occur.
Figure 7 presents a comparison between the absolute error of gravity anomaly measurements throughout the carrier’s trajectory and the standard deviation of the gravity field in the corresponding regions.
Figure 7 illustrates a clear relationship between the measurement error of gravity anomalies and the standard deviation of the gravity field in the navigation region of the carrier. The threshold lines in each region indicate that significant measurement errors in gravity anomalies primarily occur in Class III gravity fields. In order to improve the accuracy of gravity matching navigation, the proposed method in this paper, which includes gravity field classification and algorithm selection, recommends employing the PF and MCM algorithms in regions characterized by Class III gravity fields. These algorithms demonstrate robust resistance to noise. Conversely, when the standard deviation of the grid where the carrier is located falls below the lower threshold limit of the interval, the noise in gravity anomaly measurements is reduced, making EKF-g the preferred choice for ensuring navigation accuracy and stability.
3.2. Gravity Matching in Different Gravity Fields
Within Region , the carrier traversed three distinct levels of gravity field. Based on the advanced threshold division of gravity field in 3.1 and the trajectory of carrier, three segments of the trajectory are selected for comparison. These selected segments were subjected to comparative experiments using the MCM, SITAN, and PF algorithms, as well as the PMMADM algorithm proposed in this paper.
In the SITAN algorithm, the linearization method for the gravity field adopts a nine-point fitting approach, and the initial position is set to the INS indication position. In the PF algorithm, the initial distribution state of the particle swarm follows a normal distribution, with the mean value equal to the inertial guide position and a standard deviation of 0.05°. For the MCM algorithm, the sampling sequence length is set to 20, the search range radius is two grids, and the sampling sequence is updated using a sliding window. In order to maintain consistency in the comparison experiments, the parameter settings for the PMMADM algorithm remain the same as those used for each algorithm in the comparison.
3.2.1. Track Segment I
The standard deviations of the gravity map grid points encountered in this trajectory segment are all below the lower threshold of Region
. This indicates a relatively flat gravity field with indistinct features in this region. The latitude and longitude errors obtained by the matching algorithms are shown in
Figure 8.
Both the MCM and PF algorithms fail to accurately determine the true position of the carrier and can only perform gravity matching calculations when there are trajectory points, resulting in discontinuous outputs for gravity navigation. On the other hand, the SITAN algorithm exhibits a smooth and continuous error curve, although it also falls short in precisely determining the carrier’s actual position. However, it demonstrates favorable real-time performance and stability.
As the gravity field encountered in this segment is classified as Level I based on the decision tree, it indicates that the PMMADM algorithm, in this region, only employs EKF-g for corrections. Consequently, its matching results align with those of the SITAN algorithm and it isn’t shown in the
Figure 8.
3.2.2. Track Segment II
In this segment of the trajectory, the carrier is situated in a region with a relatively large standard deviation of the gravity field, while the maximum value of gravity measurement error does not exceed 3 mGal. At this stage, the carrier is positioned in an area with distinct characteristics and minimal measurement errors, making it well-suited for conducting gravity matching calculations to achieve higher positioning accuracy. The latitude and longitude errors obtained from the four algorithms are illustrated in
Figure 9.
As depicted in
Figure 9, when the gravity measurement errors are small and the gravity field exhibits distinct features, all four gravity navigation algorithms confine the positioning errors within a single grid, thereby achieving effective gravity-aided navigation.
Table 3 presents the statistics of the eastward and northward distances between the matching positions of the four algorithms and the GPS positions. The data in
Table 3 indicate that within the adapted region, the proposed algorithm demonstrates the highest positioning accuracy and stability.
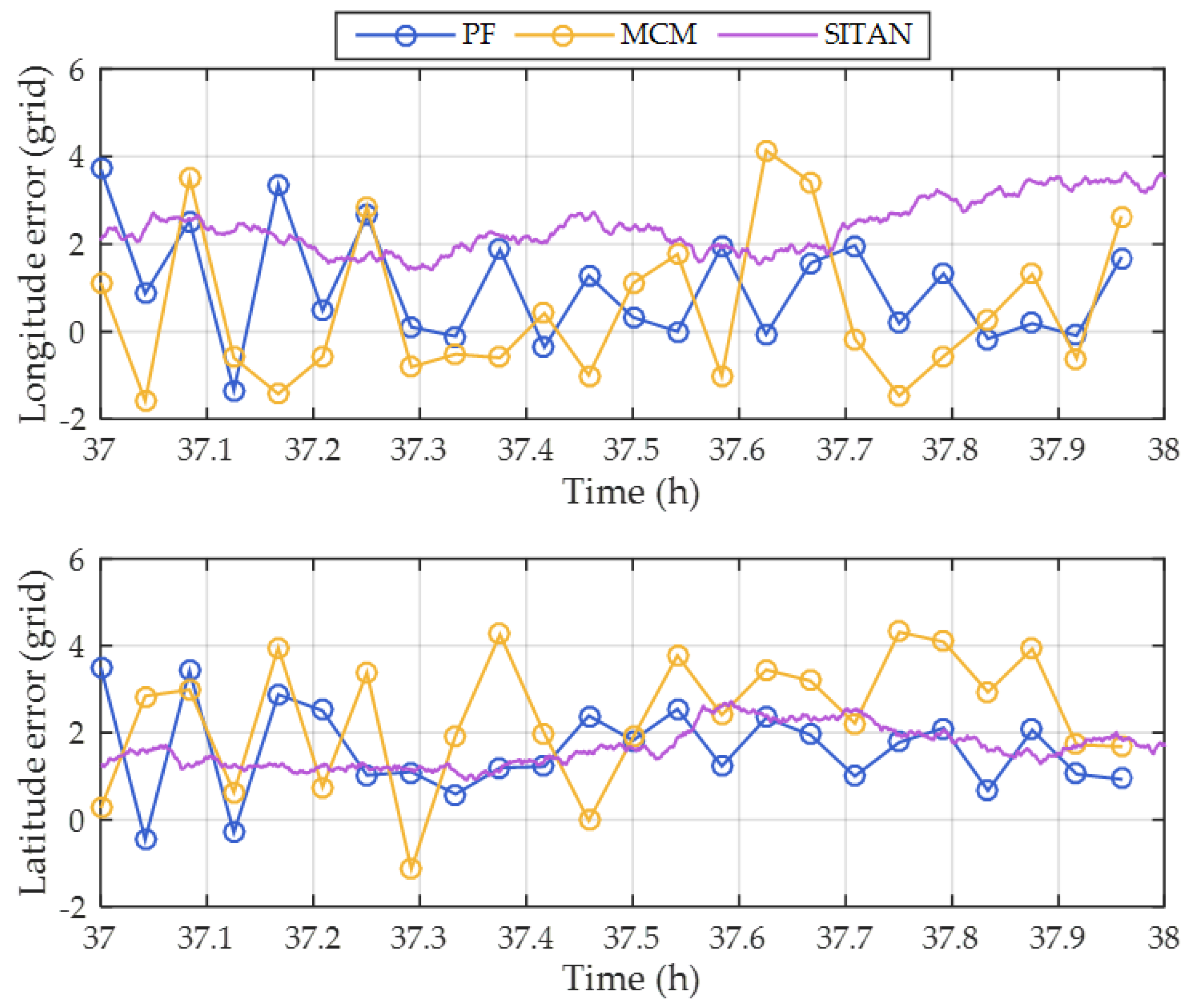
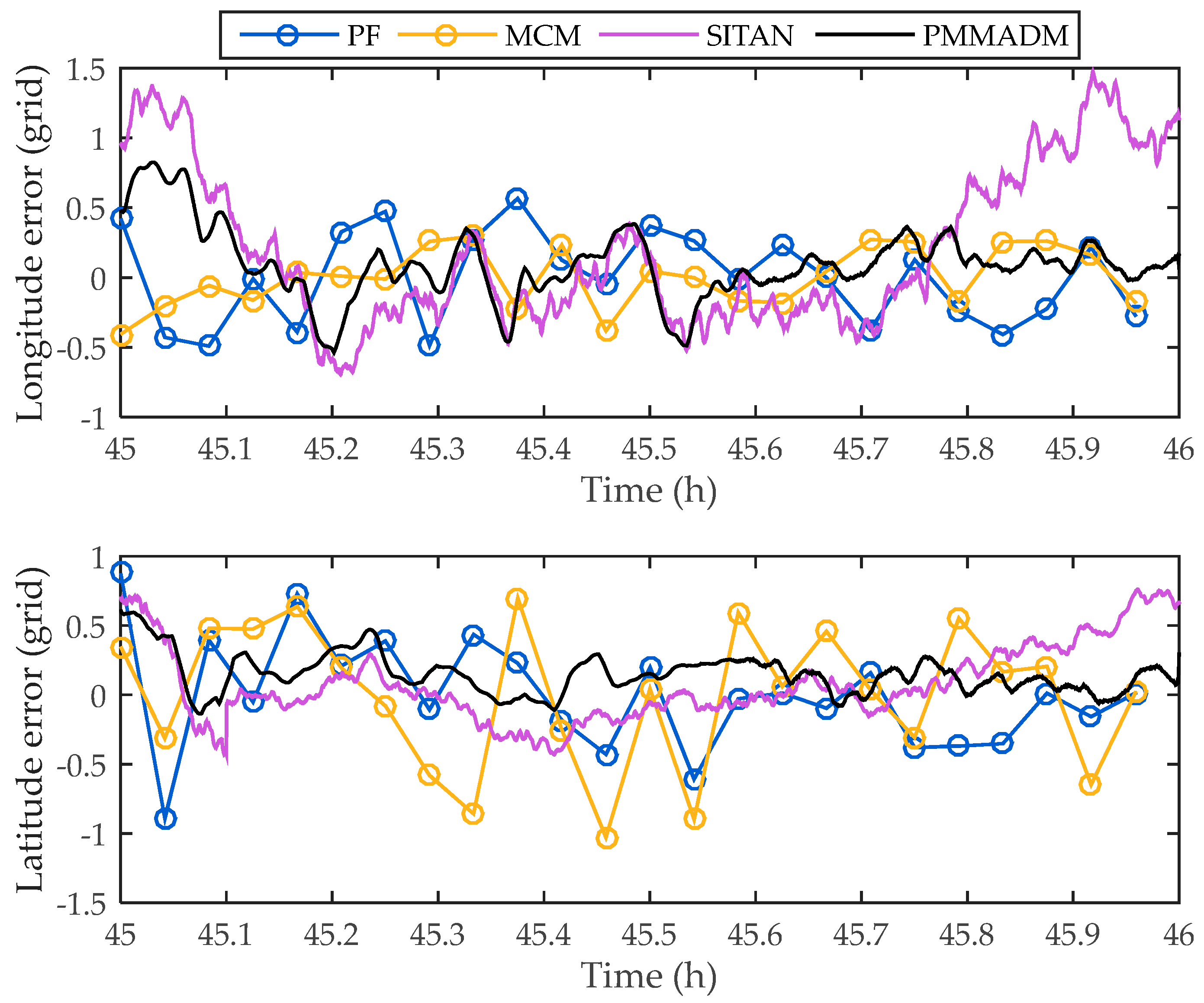
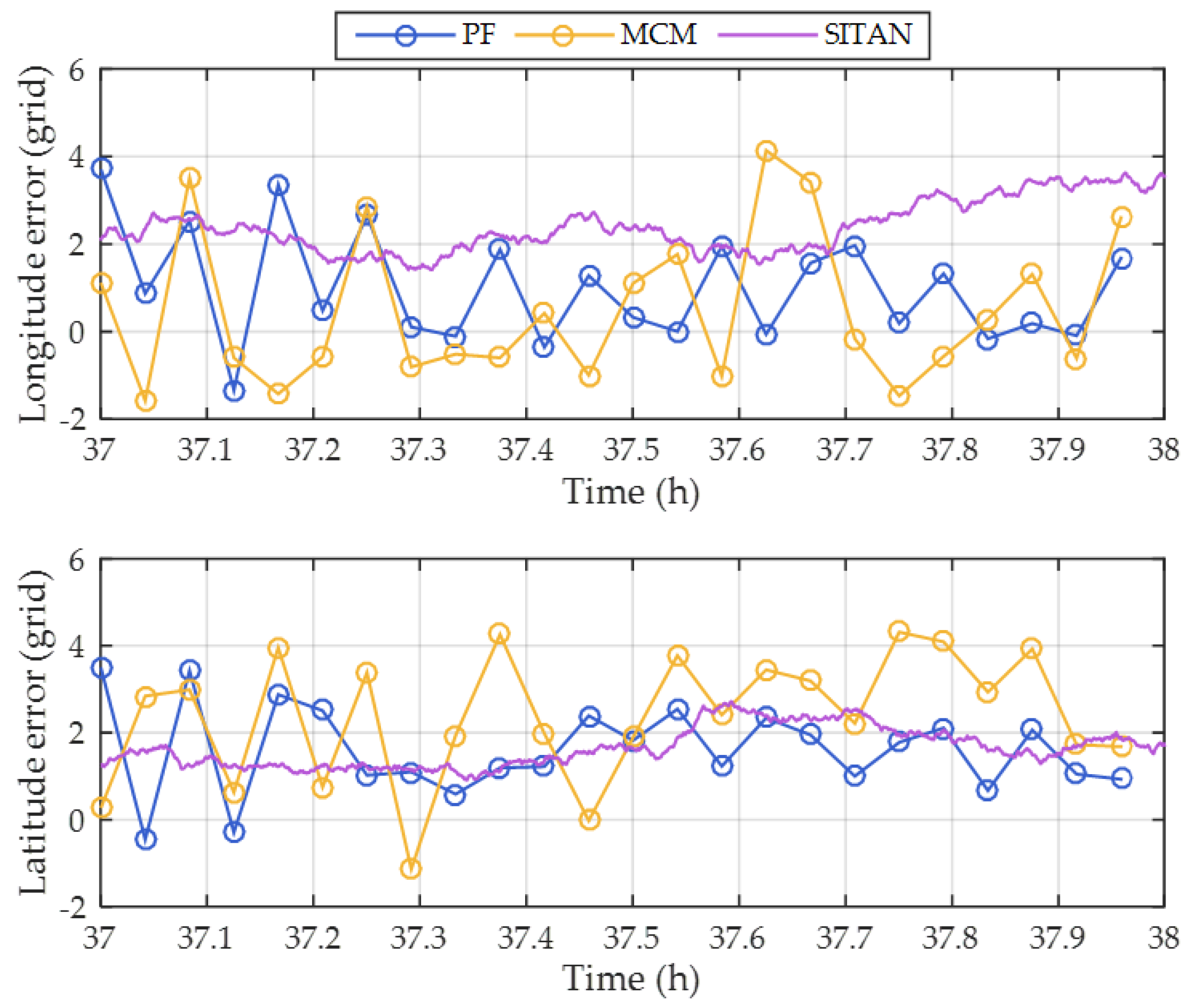
3.2.3. Track Segment III
During this trajectory segment, the carrier transitions from a region with gravity classified as level II to another region with level III gravity, and there are significant variations in the encountered gravity field. Towards the end of the trajectory, post-data processing reveals large random errors in the gravity anomaly measurements. The matching results obtained from the four different methods are illustrated in
Figure 10.
At the beginning of this trajectory segment, the longitude error is within one grid, and the latitude error is 0.7 grid. Within the adaptable region and experiences relatively low gravity measurement noise in the beginning, both SITAN and PMMADM quickly converge to the vicinity of the true position. PF and MCM algorithms also exhibit a similar trend of reducing the INS position error during the initial stage. Towards the end of the trajectory, a sudden increase in measurement noise leads to the divergence of SITAN’s longitude error, and the latitude error gradually increases, no longer showing a trend of convergence towards the true position. From
Figure 10, it is evident that PF, MCM, and PMMADM exhibit robustness against noise at this stage. Their positioning errors remain stable, and they can still perform correct matching navigation.
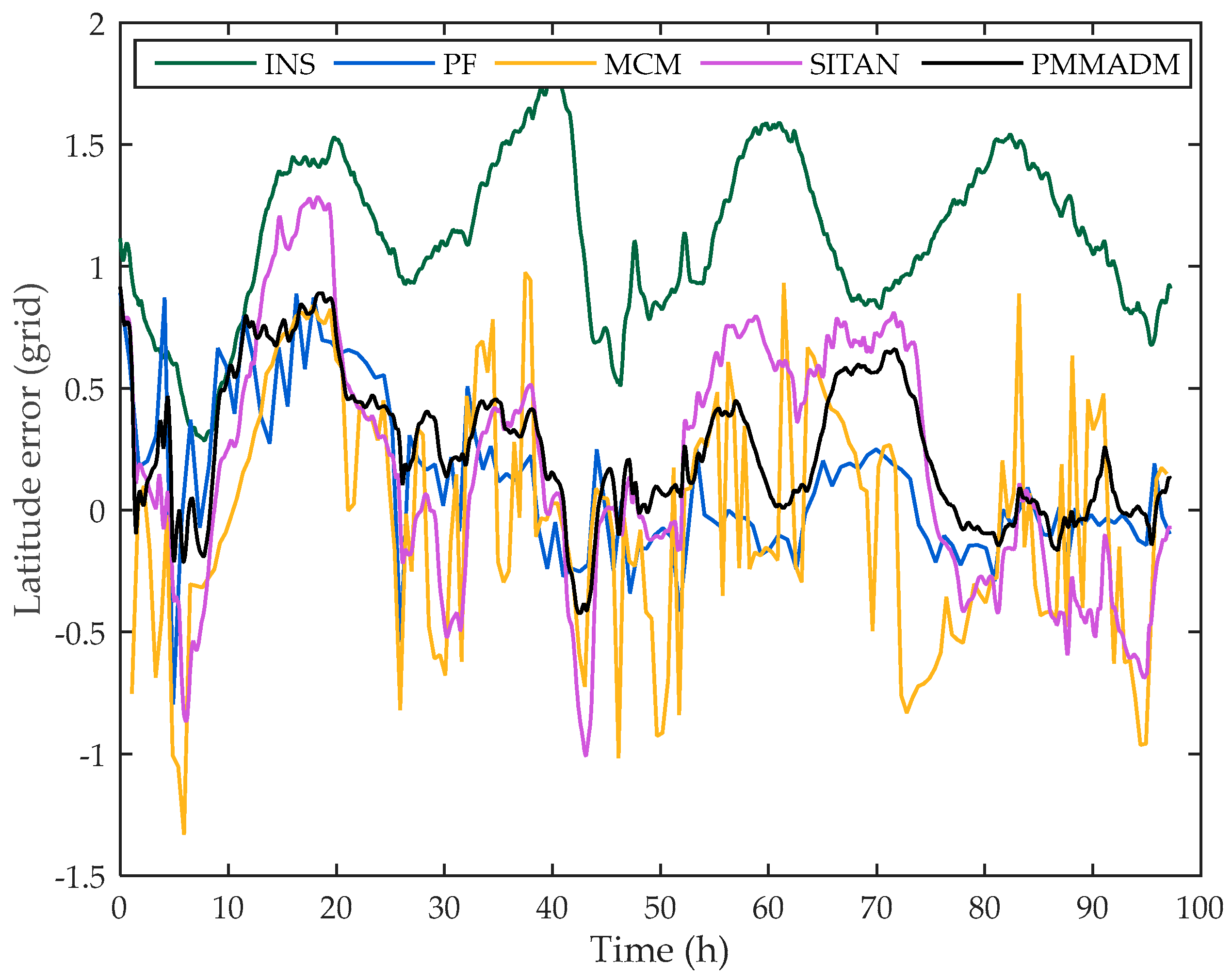
3.3. Gravity Matching Navigation under Long Time
To investigate the performance of the proposed algorithm in continuous gravity matching during long-term navigation, this experiment conducted continuous matching navigation using the entire voyage data. In the matching process, to prevent mismatching that could disrupt the normal functioning of traditional algorithms, we introduced DVL velocity as an additional constraint for the three comparative algorithms used in Experiment 3.2.
With these modifications, gravity matching navigation is performed independently using these algorithms, and the resulting navigation outcomes are compared with the GPS positions. The errors in latitude and longitude are depicted in
Figure 11 and
Figure 12, respectively.
From
Figure 11 and
Figure 12, it can be observed that the INS exhibits initial position errors, with a longitude error of 0.8 grid and a latitude error of 1 grid. Without external position information for correction, the navigation error curve of the INS fluctuates periodically, rendering it ineffective for accurate navigation positioning. The SITAN algorithm corrects the initial position error early in the voyage. However, due to the influence of gravity anomaly measurement noise, the SITAN algorithm experiences rapid error divergence in certain regions. The PF algorithm demonstrates significant random matching errors in the initial stage, as the particle swarm carries limited genetic information. As the particle swarm gradually evolves, the matching errors in the later stages of the voyage exhibit reduced fluctuations, but a fixed error remains. The error curve of the MCM method fluctuates around zero, but it often produces incorrect matching points, indicating relative instability compared to other algorithms.
All three algorithms have limitations in achieving gravity-aided navigation in certain regions. However, PMMADM overcomes these limitations by employing decision judgment to avoid regions with flat gravity fields or obvious gravity anomaly measurement noise, resulting in more effective gravity matching navigation. The error curves of PMMADM demonstrate rapid convergence to a position error close to zero at the beginning of the navigation. Throughout the entire voyage, the error curves remain smooth and stable. After 10 h, the longitude error does not exceed half a grid, and after 20 h, the latitude error does not exceed 0.7 grid, indicating a high level and stable of positioning accuracy achieved by PMMADM.
Based on the navigation area of the carrier, the trajectory of the route in areas I–IV is classified as the first section, while the trajectory of the route in areas XI–XII is classified as the second section. The first section exhibits distinct gravity field characteristics, whereas the second section experiences a flat gravity field.
Table 4 presents a comprehensive statistical analysis of the relative position errors for the two trajectories using different gravity matching methods.
It is evident from
Table 4 that the PMMADM algorithm exhibits superior stability and accuracy in terms of localization error and is less susceptible to the influence of gravity field characteristics, regardless of whether it is in regions with significant gravity field variations or in flat regions. In the first trajectory segment, both the MCM and SITAN algorithms demonstrate smaller average matching errors compared to the latter half of the trajectory. In the second trajectory segment, the particle swarm evolution of the PF algorithm is sufficient, resulting in higher localization accuracy and stability when compared to MCM and SITAN. Remarkably, the PMMADM algorithm consistently achieves comparable levels of localization accuracy across gravity fields with different characteristics, showcasing superior stability and broader applicability.
4. Conclusions
This paper introduces a parallel multi-method adaptive decision method for gravity matching navigation. By computing the standard deviation thresholds of the gravity field within the navigation area, the algorithm classifies the gravity field into three levels. Based on the current navigation state and the gravity field level at each grid point, the algorithm autonomously determines the appropriate gravity matching method to be used in the navigation system. This methodology effectively leverages the unique strengths of different gravity matching algorithms in various gravity field scenarios, expanding the applicability of gravity-aided navigation.
The experiments conducted in this paper demonstrate that the proposed algorithm effectively reduces the impact of high noise levels in gravity field measurements by classifying the gravity field. As a result, the algorithm enhances the robustness of gravity matching navigation in noisy environments. The navigation tests further confirm that the algorithm, integrated into a navigation system comprising INS, DVL, and gravimeter, enables continuous and long-term navigation capabilities.
However, it is important to acknowledge the limitations of the algorithm proposed in this study. Firstly, the precomputation of gravity field standard deviation thresholds may involve redundant calculations. Exploring the possibility of real-time computation of thresholds in the proximity of the inertial navigation system’s position could reduce computational burden. Secondly, there is potential for further advancements in the individual branches of the adaptive algorithm, with the goal of improving both localization accuracy and real-time performance of the matching algorithm.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}