
Increasing Maritime Safety and Security in the Off-Shore Activities with HFSWRs as Primary Sensors for Risk Assessment

 , , ,
, , ,
Abstract
1. Introduction
2. Over the Horizon Maritime Sensor Network in the Gulf of Guinea
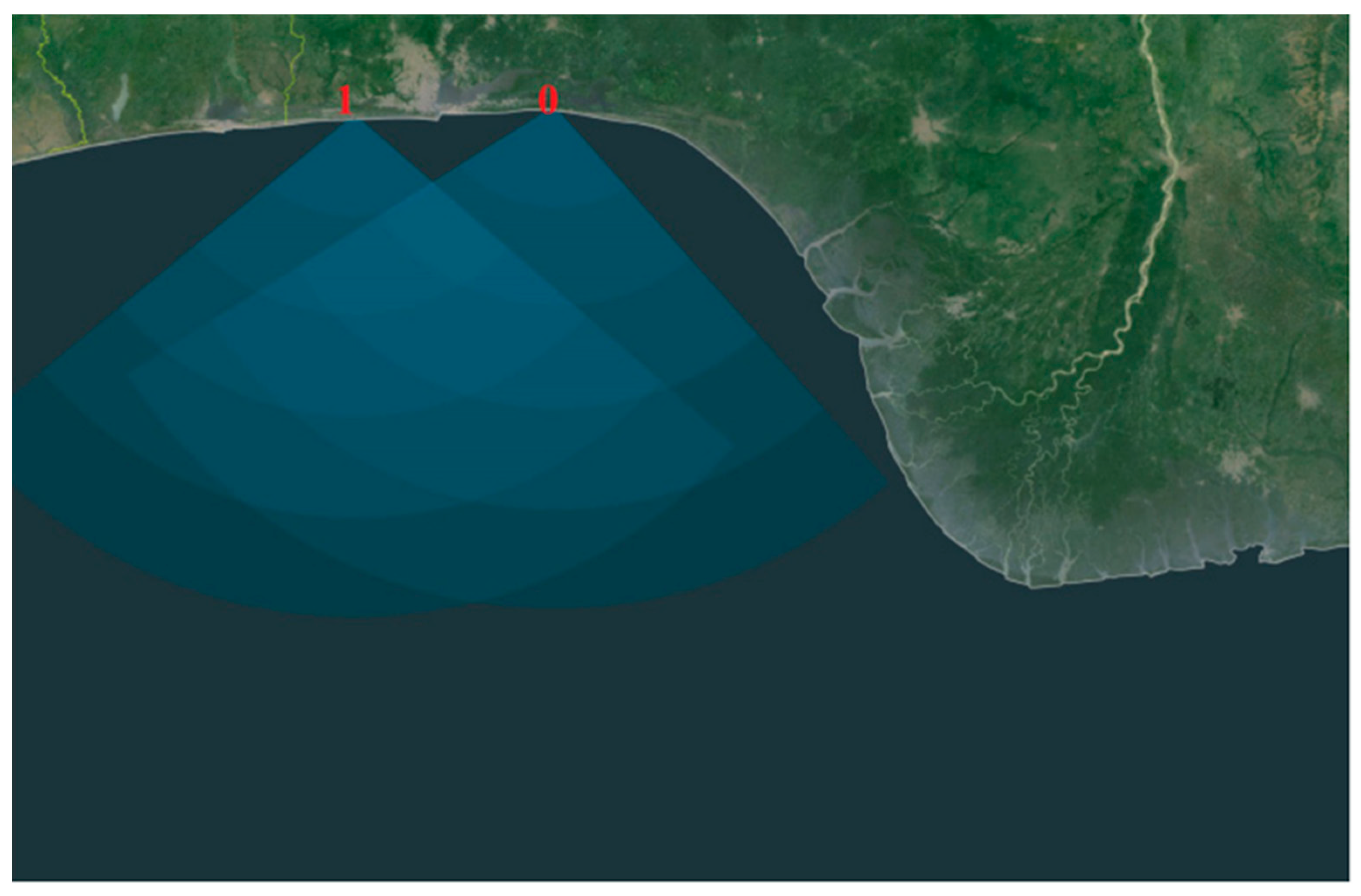
- Two HFSWRs with a nominal range of 80 nautical miles (approximately 150 km) for a Bonn Express class of vessel [21] during night-time and sea states [22] up to 3. For larger vessels and during the day—time range can extend even beyond 125 nautical miles (approximately 230 km). Regardless of the time of day and vessel size, angle coverage is set to 120 degrees. More about used HFSWRs can be found further in the text, while the HFSWR network coverage area is shown in Figure 1.
- Land AIS data: provided by multiple coastal sites equipped with AIS receivers.
- Satellite AIS data: provided by the SAIS provider [20].
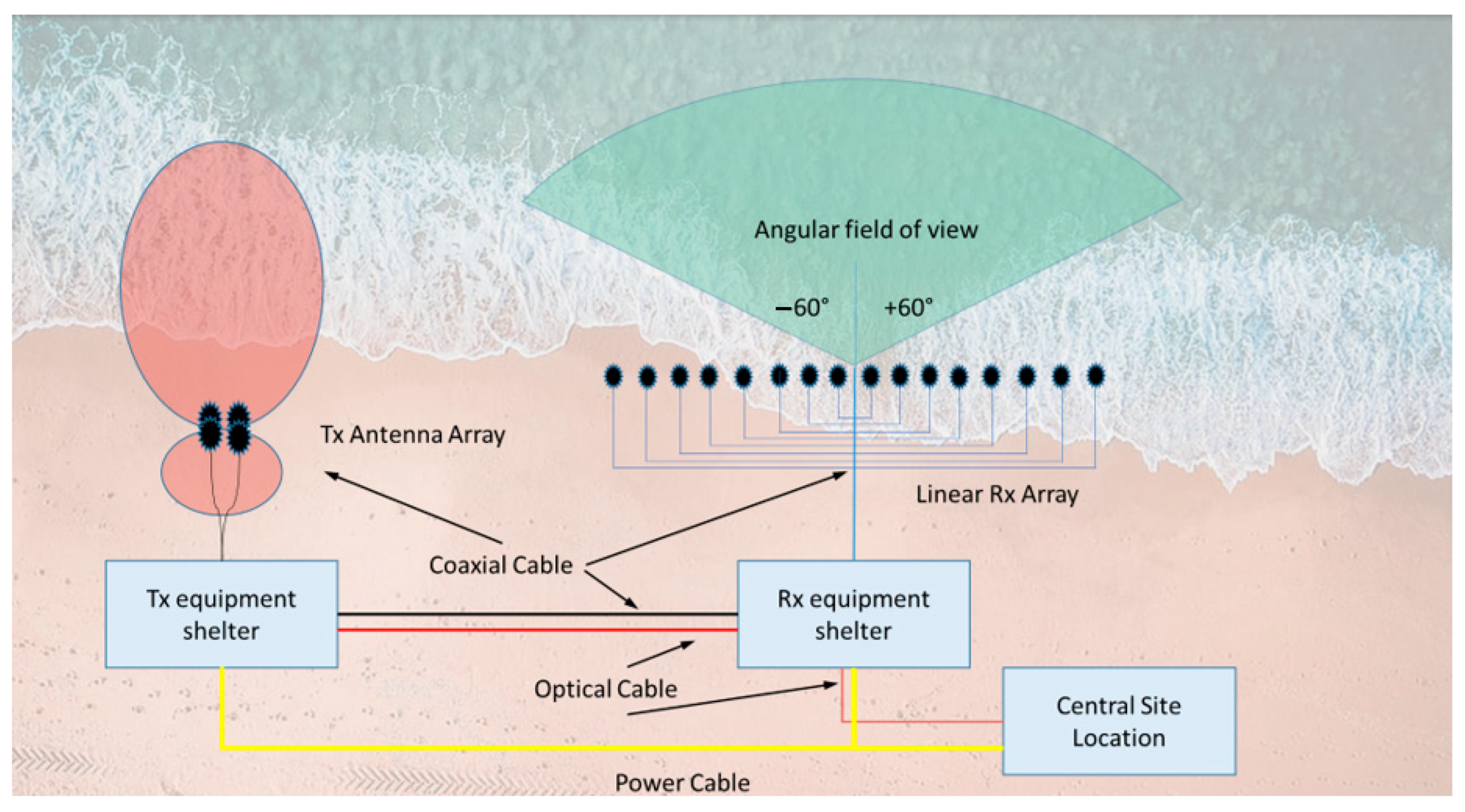
2.1. A Brief Description of Deployed HFSWR
- Range processing:where the digitalized complex envelope of the received signal is translated into the baseband, followed by the Fast Fourier Transform. In this way, the received signal is reshaped into signal level vs range form.
- Doppler processing:where the signal is processed by the Blackman–Harris window function for suppression of higher order side lobes, followed by FFT, which outputs the Range–Doppler maps. These maps are generated for each angle value in the HFSWR field of view and represent signal levels dependent on the range and speed (Doppler shift) of targets.
- Beamforming:where a conventional phase shift beam former is used for angle calculations, with the Orchard algorithm used for weighting coefficients calculations [18]. Numerical solving in an iterative manner provides the end result of beamforming: the so-called Range–Doppler–Azimuth cube (RDA cube), which contains signal power levels defined by all relevant parameters (range, Doppler shift, and azimuth).
- Constant false alarm rate (CFAR) processing:where the input data for processing is given in the form of RDA cubes and joint noise/clutter distribution functions–formed especially for the area of the Gulf of Guinea (and thus representing dedicated, original contribution in modified Cell Averaging Greatest of CFAR algorithm used further for target detection). The end result of this processing is provided in the form of a list of detected targets.
- Tracking:where all detections are fed to the algorithms with a track–before–detect principle to eliminate false targets by adopting a dedicated clutter density estimator [19]. In the Data association (DA) procedure, the simple gating density-based clustering method has been adopted: gating is based on the squared Mahalanobis distance (enhanced through binary search methods) and performed via an ellipsoid gate. The clustering process is relatively straightforward, performed on the list of all available tracks and ensuring that there are practically no links between the clusters in case of two measurements that differ only by range, it can be shown that the allowed range value differences span from 8 km to 32 km for extreme precision cases. Bearing differences span from 5° to 16°, while radial velocity spans from 1.8 m/s to 8 m/s. Optimal track-to-measurement assignments in a data association process are achieved with the partial use of JPDA on a majority of clusters (and the real-time performance with faster sub-optimal Roecker’s algorithm in less than 2% of all cluster cases).
2.2. Description of Data Fusion Algorithms
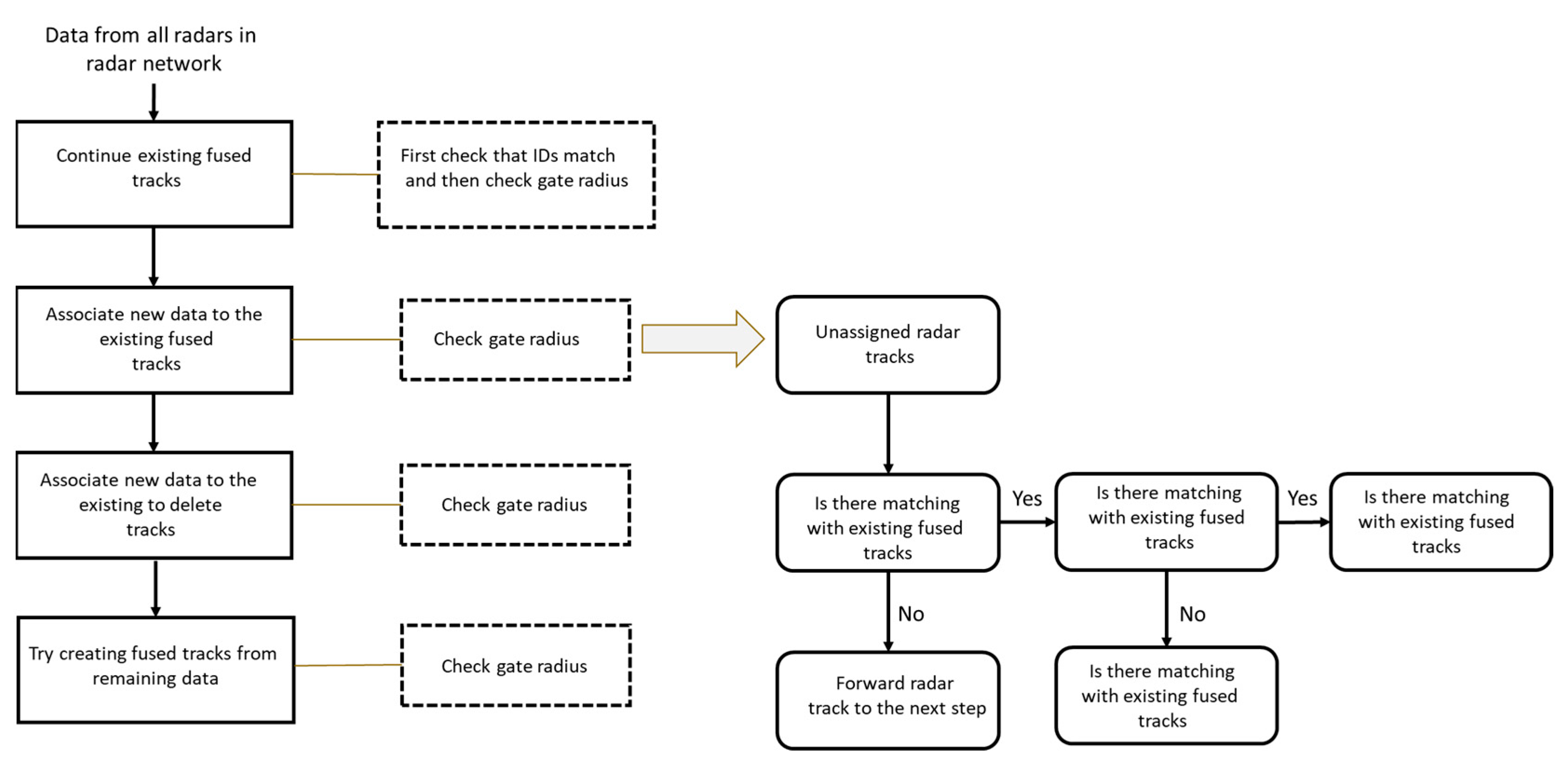
2.2.1. HFSWR–HFSWR Data Fusion Algorithm
2.2.2. HFSWR–AIS Data Fusion Algorithm
2.3. Role and Description of the Other Maritime Sensor in the Area
3. Analyses of Maritime Threats in the Gulf of Guinea
4. Recognizing Maritime Threats at the OTH Distances Using HFSWR
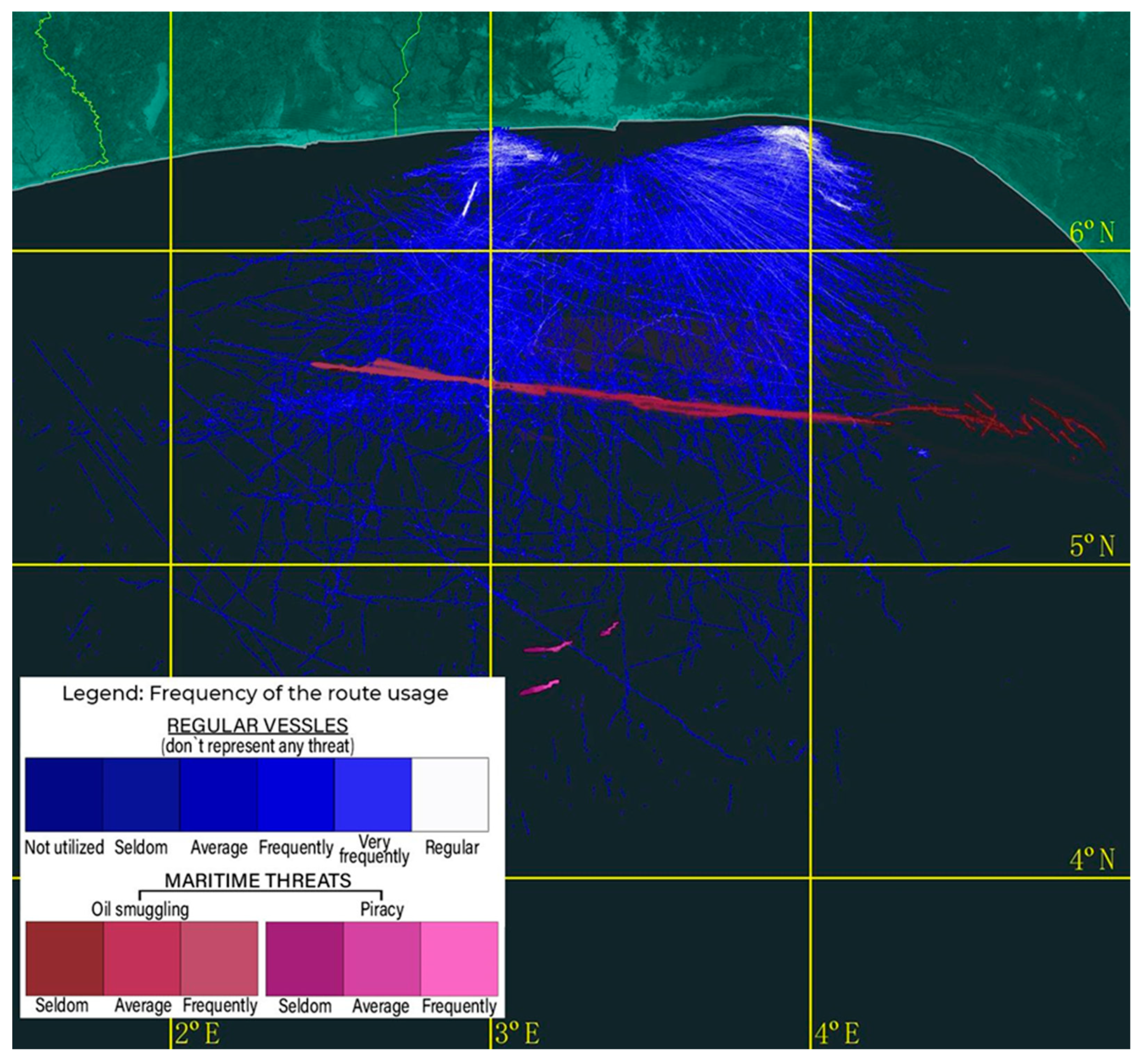
- Vessels detected in HFSWR vicinity: Those vessels are smaller fishing vessels, and despite reflecting a weak echo, they are fairly close to the HFSWR and thus are detected and tracked. Furthermore, there is a development project near the eastern HFSWR with a lot of activity in the area, so more vessels are passing in the coverage area of that HFSWR. In the end, that HFSWR is located between the port of Lagos and the oil fields in the Niger River Delta, and not all vessels passing through the area are utilizing AIS devices, although the majority of them should. All vessels in this area can also be detected with MMR and/or electro-optical systems located on the shore and thus are tracked by more than one sensor type. Henceforth, the trajectories of these vessels are depicted with shades of blue, signalizing that they do not represent a maritime threat. There are other routes that are located further away from the shore and are depicted with shades of blue in Figure 9. In practice, these routes most probably represent the vessels that simply turn off their AIS devices in order to avoid detection by pirates operating in the area since they are following the regular shipping routes. Although this is not completely in accordance with international regulations, it has been a proven tactic to avoid pirate attacks. It is clear that those vessels do not represent any kind of threat but simply try to stay out of trouble.
- Vessels whose trajectories are depicted in shades of red color: Frequent movement directly from the rich oil area westward without the utilization of AIS devices. This is extremely suspicious behavior. Although it may be argued that these vessels are also trying to avoid detection by pirates operating in the area, similar to case 2, it also may signal that there is a large-scale oil smuggling operation. If this is the case, a fleet of tankers is illegally “exporting” crude oil without approval from the authorities. Such an operation will represent a large-scale organized crime scheme involving hundreds (probably thousands) of people in multiple countries, producing millions in illegal profits annually, which directly translates to at least the same amount of losses to all participants in the legal oil trade. Naturally, the authorities checked and confirmed the suspicions, which resulted in the arrest of multiple medium-sized tankers which were transporting the oil from Niger River Delta fields westward utilizing the described route [31,32,33].
- Vessels whose trajectories are depicted in shades of purple: Unusually high number of vessels far away in the high seas which are not following any regular shipping route and do not utilize AIS devices. The three short but very frequent sailing patterns can be noticed here, all of them nearly laying perpendicular to the usual shipping routes. These patterns may very well present vessels circulating in the area looking for prey since these routes do not follow any shipping route but directly intersect them. Needless to say, this was also checked by the authorities, and even though the operation was carried away approximately 120 nautical miles offshore, the network of HFSWRs was quite successful in vectoring navy vessels toward the suspicious vessel. According to the data made publicly available during International Maritime Defense Exhibition and Conference (IMDEC) held in Accra in July 2019 [33], this operation resulted in the prevention of planned pirate attacks and the seizure of pirate vessels. According to the same source, similar operations were conducted afterward and resulted in multiple vessel seizures on the high seas, thus reducing the number of pirate attacks in the Bight of Benin by nearly 50%.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- United Nations. Handbook on Statistics 2019; United Nations Publication: Geneva, Switzerland, 2019; pp. 71–83. ISBN 978-92-1-112940-3.
- Bosch, T.; Colijn, F.; Ebinghaus, R.; Körtzinger, A.; Latif, M.; Matthiessen, B.; Melzner, F.; Oschlies, A.; Petersen, S.; Proelß, A.; et al. World Ocean Review 1, Living with the Oceans; MaribusgGmbH: Hamburg, Germany, 2010; pp. 165–170. ISBN 978-3-86648-012-4. [Google Scholar]
- UNITAR. Global Report on Maritime Piracy; UNITAR: Geneva, Switzerland, 2014; Available online: https://unosat.web.cern.ch/unosat/unitar/publications/UNITAR_UNOSAT_Piracy_1995-2013.pdf (accessed on 12 February 2023).
- UN News. Available online: https://news.un.org/en/story/2017/11/570172-un-security-council-urges-comprehensive-response-piracy-somali-coast (accessed on 20 January 2023).
- EU NAVFOR. Available online: http://eunavfor.eu/mission/ (accessed on 1 February 2023).
- World Economic Forum. Available online: https://www.weforum.org/agenda/2019/06/west-africa-is-becoming-the-world-s-piracy-capital-here-s-how-to-tackle-the-problem/ (accessed on 10 February 2023).
- The United Nations Office on Drugs and Crime. Available online: https://www.unodc.org/nigeria/en/press/west-africa-loses-2-3-billion-to-maritime-crime-in-three-years-as-nigeria--unodc-rally-multi-national-efforts-to-thwart-piracy-in-the-gulf-of-guinea.html (accessed on 11 February 2023).
- Available online: https://documents-dds-ny.un.org/doc/UNDOC/GEN/N22/366/73/PDF/N2236673.pdf?OpenElement (accessed on 9 March 2023).
- Fabrizio, G. High Frequency over-the-Horizon Radar: Fundamental Principles, Signal Processing, and Practical Applications; McGraw-Hill, Inc.: New York, NY, USA, 2013. [Google Scholar]
- Helzel, T.; Kniephoff, M.; Petersen, L. Oceanography radar system WERA: Features, accuracy, reliability and limitations. Turk. J. Electr. Eng. Comput. Sci. 2010, 18, 389–397. [Google Scholar] [CrossRef]
- Shay, L.K.; Martinez-Pedraja, J.; Cook, T.M.; Haus, B.K.; Weisberg, R.K. High-Frequency Radar Mapping of Surface Currents Using WERA. J. Atmos. Ocean. Technol. 2007, 24, 484–503. [Google Scholar] [CrossRef]
- Liu, Y.; Weisberg, R.H.; Merz, C.R. Assessment of CODAR SeaSonde and WERA HF Radars in Mapping Surface Currents on the West Florida Shelf. J. Atmos. Ocean. Technol. 2014, 31, 1363–1382. [Google Scholar] [CrossRef]
- Lipa, B.; Barrick, D.; Alonso-Martirena, A.; Fernandes, M.; Ferrer, M.I.; Nyden, B. Brahan Project High Frequency Radar Ocean Measurements: Currents, Winds, Waves and Their Interactions. Remote Sens. 2014, 6, 12094–12117. [Google Scholar] [CrossRef]
- Ponsford, A.; McKerracher, R.; Ding, Z.; Moo, P.; Yee, D. Towards a Cognitive Radar: Canada’s Third-Generation High Frequency Surface Wave Radar (HFSWR) for Surveillance of the 200 Nautical Mile Exclusive Economic Zone. Sensors 2017, 17, 1588. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.; Ji, M.; Huang, W.; Ji, Y.; Dai, Y. Vessel Tracking Using Bistatic Compact HFSWR. Remote Sens. 2020, 12, 1266. [Google Scholar] [CrossRef]
- Sevgi, L.; Ponsford, A.; Chan, H.C. An integrated maritime surveillance system based on high-frequency surface-wave radars. Part 1. Theoretical background and numerical simulations. IEEE Antennas Propag. Mag. 2001, 43, 28–43. [Google Scholar] [CrossRef]
- Ponsford, A.; Sevgi, L.; Chan, H.C. An integrated maritime surveillance system based on high-frequency surface-wave radars. Part 2. Operational status and system performance. IEEE Antennas Propag. Mag. 2001, 43, 52–63. [Google Scholar] [CrossRef] [PubMed]
- Nikolic, D.; Stojkovic, N.; Petrovic, P.; Tosic, N.; Lekic, N.; Stankovic, Z. The high frequency surface wave radar solution for vessel tracking beyond the horizon. Facta Univ. Electron. Energetics 2020, 33, 37–59. [Google Scholar] [CrossRef]
- Stojkovic, N.; Nikolic, D.; Puzović, S. Density Based Clustering Data Association Procedure for Real–Time HFSWRs Tracking at OTH Distances. IEEE Access 2020, 8, 39907–39919. [Google Scholar] [CrossRef]
- Satellite AIS. Available online: https://www.orbcomm.com/en/solutions/maritime/ais-data (accessed on 10 February 2023).
- Marine Traffic. Available online: https://www.marinetraffic.com/is/ais/details/ships/shipid:371702/mmsi:-8711368/imo:8711368/vessel:BONN_EXPRESS (accessed on 15 January 2023).
- Table 3700: Sea State. Available online: https://www.nodc.noaa.gov/woce/woce_v3/wocedata_1/woce-uot/document/wmocode.htm (accessed on 15 January 2023).
- Institute Vlatacom. vHF-OTH Radar System Design Document; Internal Company Standard Document; Institute Vlatacom: Belgrade, Serbia, 2014. [Google Scholar]
- Nikolic, D.; Stojkovic, N.; Popovic, Z.; Tosic, N.; Lekic, N.; Stankovic, Z.; Doncov, N. Maritime over the horizon sensor integration: HFSWR data fusion algorithm. Remote Sens. 2019, 11, 852. [Google Scholar] [CrossRef]
- Nikolic, D.; Stojkovic, N.; Lekic, N. Maritime over the Horizon Sensor Integration: High Frequency Surface Wave Radar and Automatic Identification System Data Integration Algorithm. Sensors 2018, 18, 1147. [Google Scholar] [CrossRef] [PubMed]
- Institute Vlatacom. OTHR System: Results of the Field Measurement Report; Internal Company Standard Document; Institute Vlatacom: Belgrade, Serbia, 2016. [Google Scholar]
- Okafor-Yarwood, I.; Adewumi, I.; Pigeon, M. Stable Seas: Gulf of Guinea. Available online: https://www.researchgate.net/publication/340952763_Stable_Seas_Gulf_of_Guinea (accessed on 9 March 2023).
- World Wildlife Overfishing. Available online: https://www.worldwildlife.org/threats/overfishing (accessed on 10 February 2023).
- Greenpeace. Available online: https://www.greenpeace.org.uk/what-we-do/oceans/overfishing/ (accessed on 10 February 2023).
- Merem, E.C.; Twumasi, Y.; Wesley, J.; Alsarari, M.; Fageir, S.; Crisler, M.; Romorno, C.; Olagbegi, D.; Hines, A.; Ochai, G.S.; et al. Analyzing the Tragedy of Illegal Fishing on the West African Coastal Region. Int. J. Food Sci. Nutr. Eng. 2019, 9, 1–15. [Google Scholar] [CrossRef]
- Over the Horizon Surveillance System Performance; Internal Report of the End-User, Undisclosed Communication, 2019.
- This Day. Available online: https://www.thisdaylive.com/index.php/2019/07/26/naval-chief-lauds-rmac-falcon-eye-for-arrests-of-130-illegal-vessels/ (accessed on 15 January 2023).
- Ibas, I.E. Falcon Eye Illegality Prevention. In Proceedings of the International Maritime Defense Exhibition and Conference (IMDEC), Accra, Ghana, 24–25 July 2019. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Quantity | Resolution | Extreme Value Range |
|---|---|---|
| Range | 1.5 [km] | 0.5–2 |
| Bearing | 1 [°] | 0.5–1.5 |
| Range rate | 0.32 [m/s] | 0.5–2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nikolic, D.; Stojkovic, N.; Puzovic, S.; Popovic, Z.; Stojiljkovic, N.; Grbic, N.; Orlic, V.D. Increasing Maritime Safety and Security in the Off-Shore Activities with HFSWRs as Primary Sensors for Risk Assessment. J. Mar. Sci. Eng. 2023, 11, 1167. https://doi.org/10.3390/jmse11061167
Nikolic D, Stojkovic N, Puzovic S, Popovic Z, Stojiljkovic N, Grbic N, Orlic VD. Increasing Maritime Safety and Security in the Off-Shore Activities with HFSWRs as Primary Sensors for Risk Assessment. Journal of Marine Science and Engineering. 2023; 11(6):1167. https://doi.org/10.3390/jmse11061167
Chicago/Turabian StyleNikolic, Dejan, Nikola Stojkovic, Snezana Puzovic, Zdravko Popovic, Nikola Stojiljkovic, Nemanja Grbic, and Vladimir D. Orlic. 2023. "Increasing Maritime Safety and Security in the Off-Shore Activities with HFSWRs as Primary Sensors for Risk Assessment" Journal of Marine Science and Engineering 11, no. 6: 1167. https://doi.org/10.3390/jmse11061167
APA StyleNikolic, D., Stojkovic, N., Puzovic, S., Popovic, Z., Stojiljkovic, N., Grbic, N., & Orlic, V. D. (2023). Increasing Maritime Safety and Security in the Off-Shore Activities with HFSWRs as Primary Sensors for Risk Assessment. Journal of Marine Science and Engineering, 11(6), 1167. https://doi.org/10.3390/jmse11061167