


A Hardware-in-the-Loop Simulator to Optimize Autonomous Sailboat Performance in Real Ocean Conditions



Abstract
1. Introduction
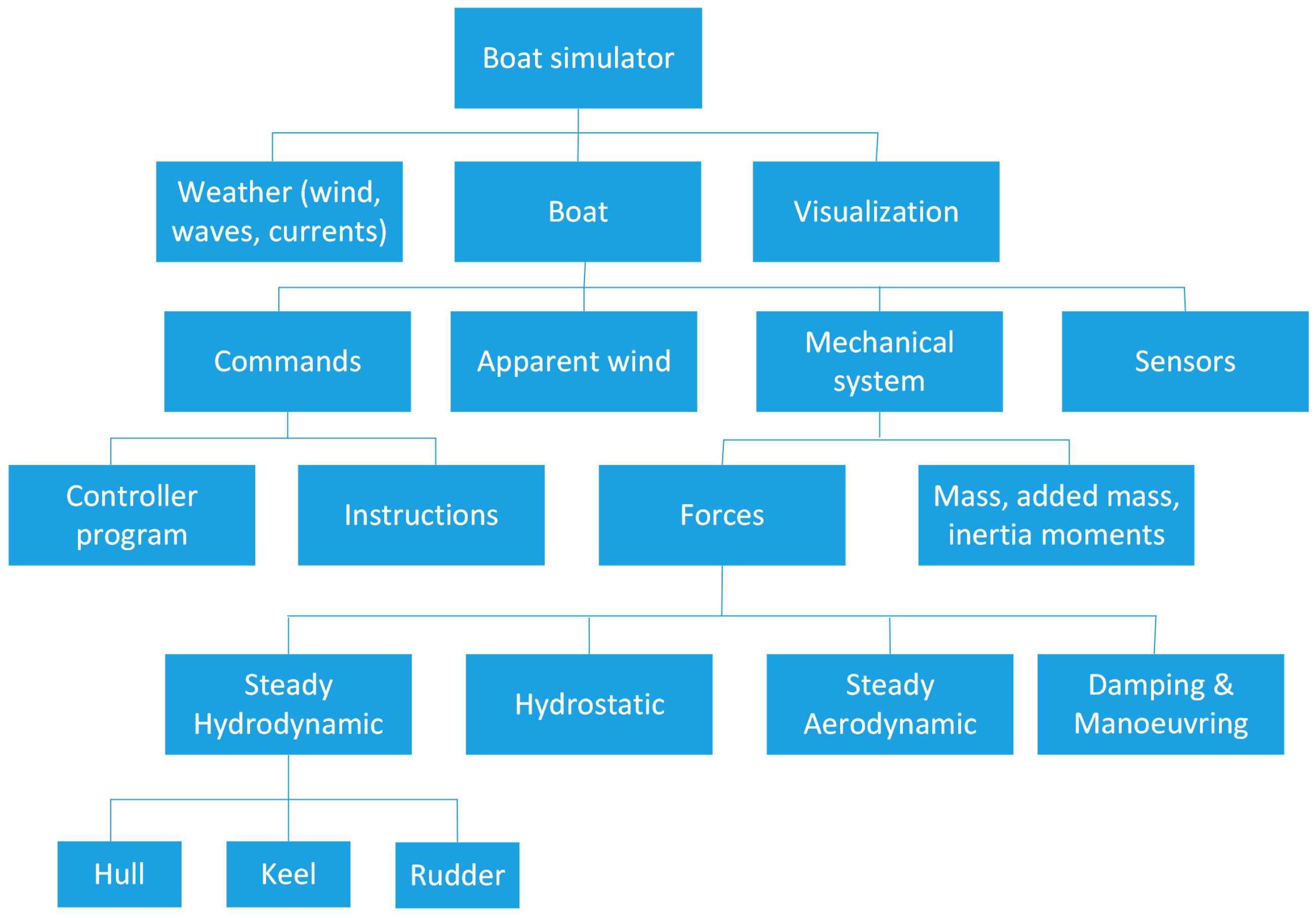
2. System Model
2.1. Dynamics of the Sailboat
2.2. Pilot
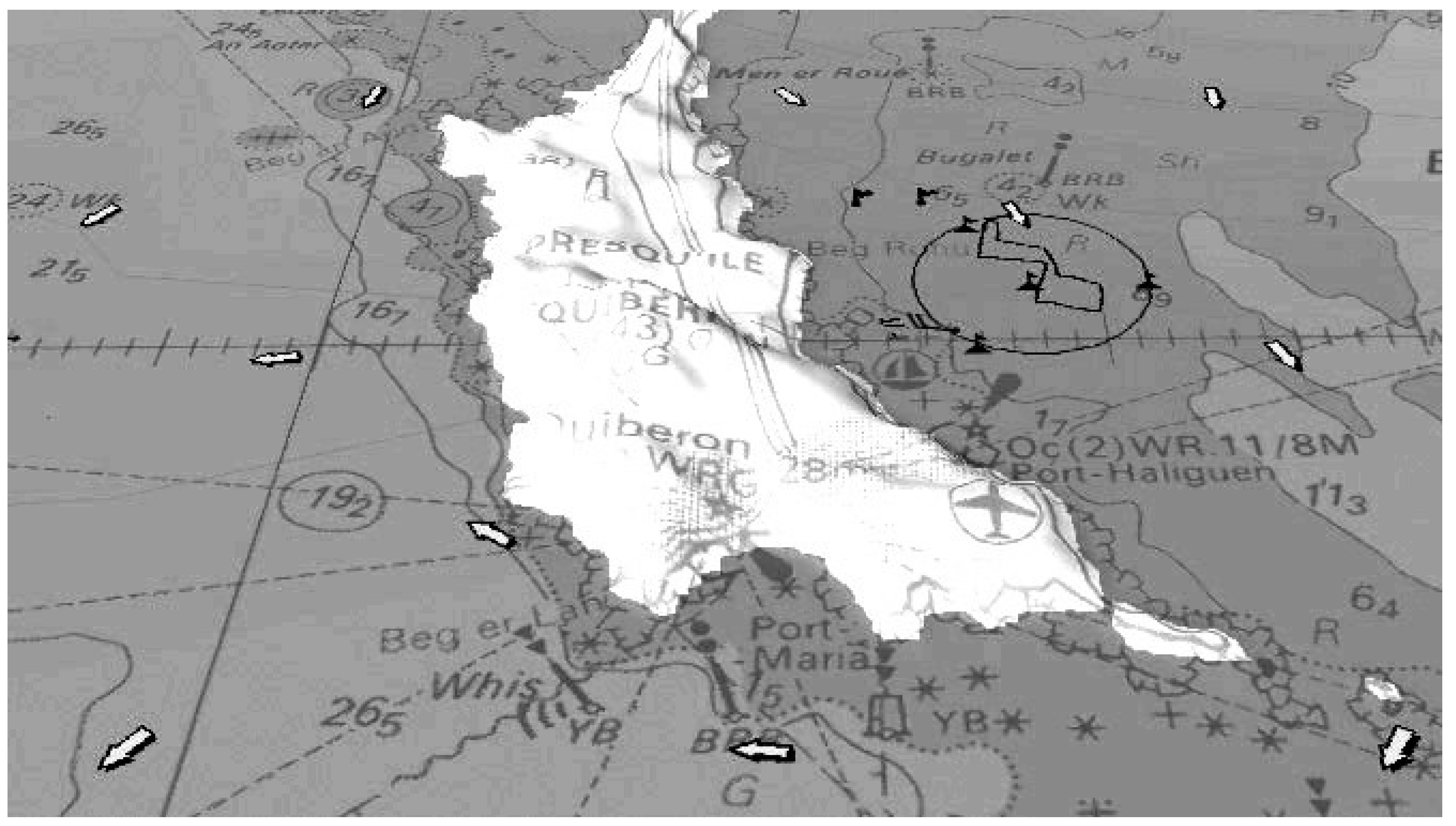
2.3. Environmental Conditions
3. Time-Based HIL Simulator
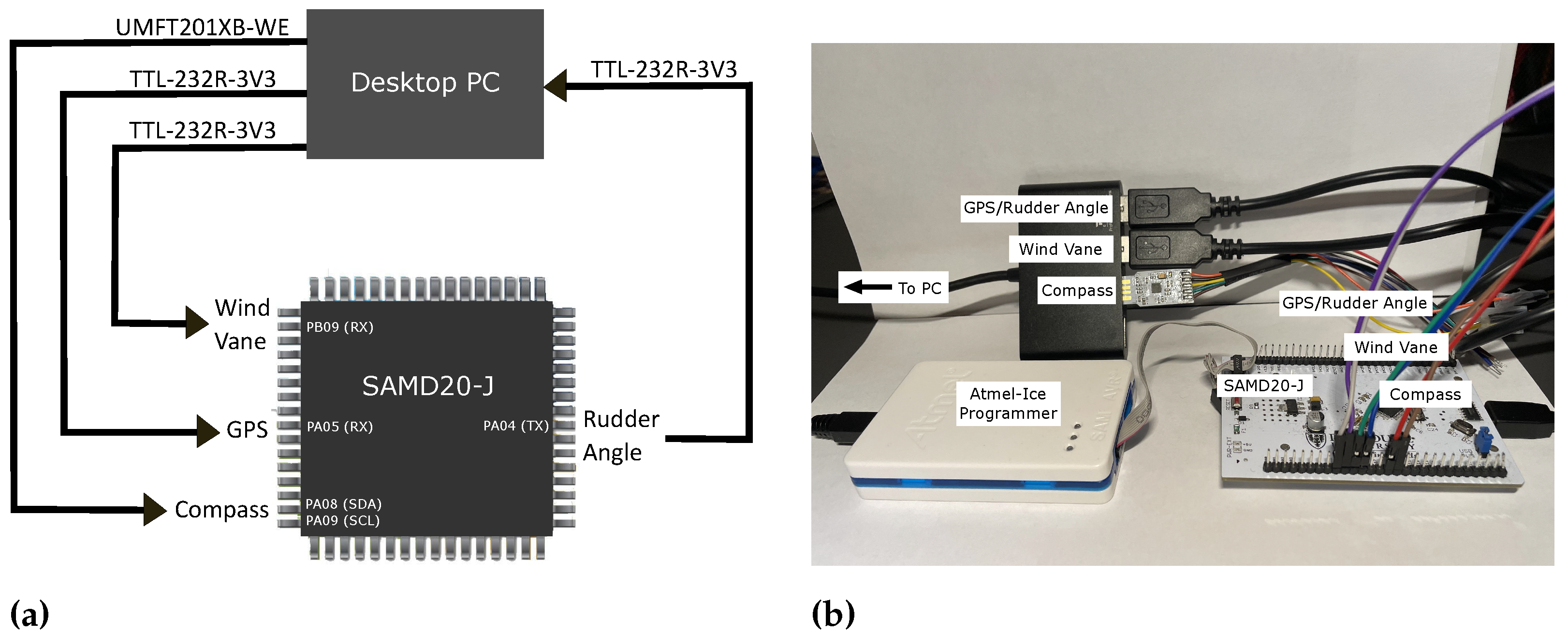
3.1. The Embedded System
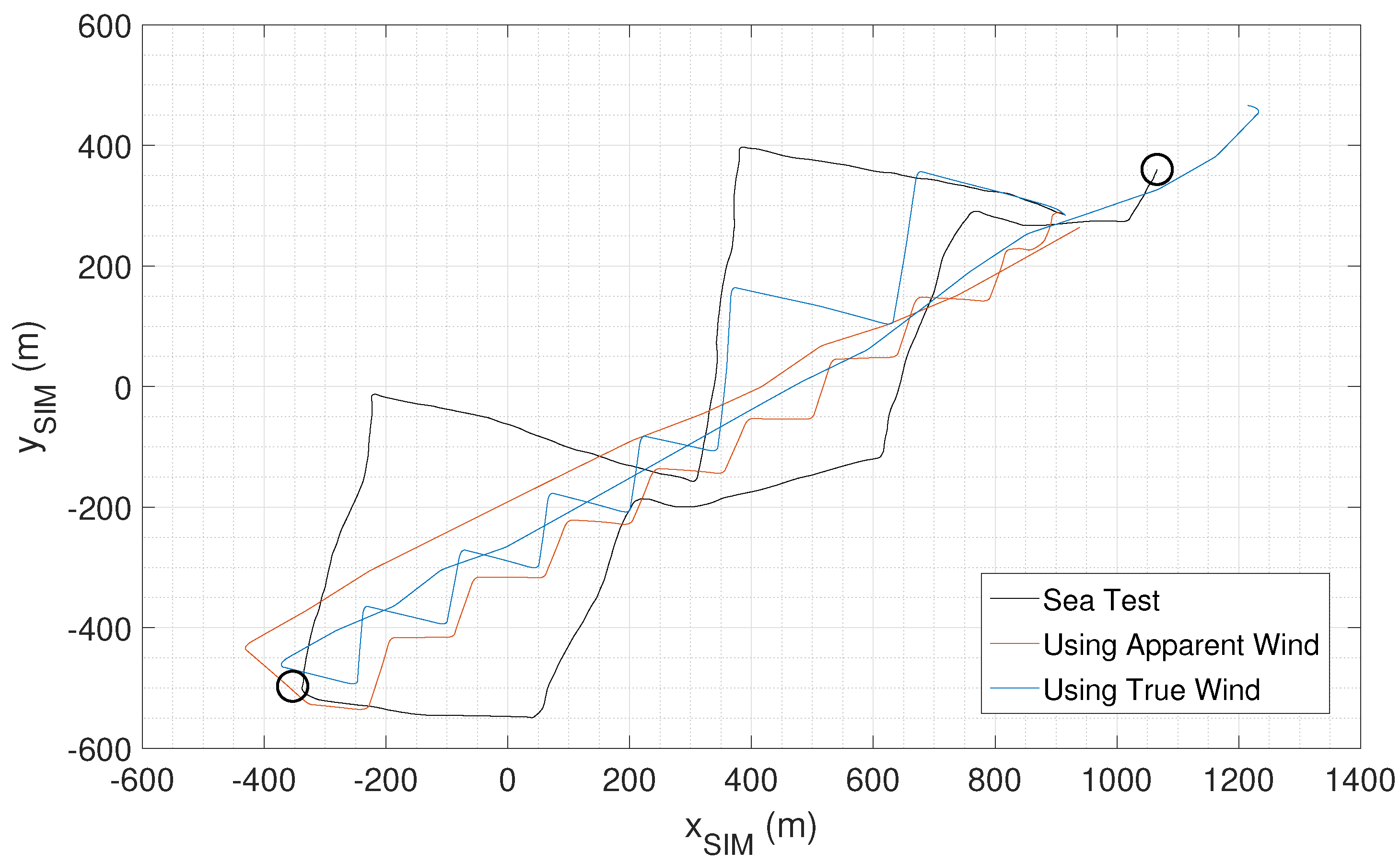
3.2. Hardware-in-the-Loop
4. Optimization of Constants
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Akiyama, T.; Bousquet, J.F.; Roncin, K.; Muirhead, G.; Whidden, A. An Engineering Design Approach for the Development of an Autonomous Sailboat to Cross the Atlantic Ocean. Appl. Sci. 2021, 11, 8046. [Google Scholar] [CrossRef]
- An, Y.; Yu, J.; Zhang, J. Autonomous sailboat design: A review from the performance perspective. Ocean Eng. 2021, 238, 109753. [Google Scholar] [CrossRef]
- Bakdi, A.; Glad, I.K.; Vanem, E. Testbed Scenario Design Exploiting Traffic Big Data for Autonomous Ship Trials Under Multiple Conflicts With Collision/Grounding Risks and Spatio-Temporal Dependencies. IEEE Trans. Intell. Transp. Syst. 2021, 22, 7914–7930. [Google Scholar] [CrossRef]
- Moreno-Ortiz, A.; Sánchez-Orozco, D.; López-Estrada, L.; Tutivén, C.; Vidal, Y.; Fajardo-Pruna, M. Modelling of an Intelligent Control Strategy for an Autonomous Sailboat - SenSailor. In Proceedings of the 2022 5th International Conference on Advanced Systems and Emergent Technologies (IC_ASET), Hammamet, Tunisia, 22–25 March 2022; pp. 34–38. [Google Scholar] [CrossRef]
- Martínez, L.; Jose, S.; Rodríguez, H. Design, Modeling and Simulation of the Navigation and Control Systems for an Autonomous Sailboat Using ROS-Gazebo. In Proceedings of the 2022 8th International Engineering, Sciences and Technology Conference (IESTEC), Panama City, Panama, 19–21 October 2022; pp. 691–698. [Google Scholar] [CrossRef]
- Sauzé, C.; Neal, M. Simulating Sailing Robots. In Robotic Sailing; Schlaefer, A., Blaurock, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 113–124. [Google Scholar]
- Clement, B. Control algorithms for a sailboat robot with a sea experiment. IFAC Proc. Vol. 2013, 46, 19–24. [Google Scholar] [CrossRef]
- Stojcsics, D.; Molnar, A. Fixed-wing small-size UAV navigation methods with HIL simulation for AERObot autopilot. In Proceedings of the 2011 IEEE 9th International Symposium on Intelligent Systems and Informatics, Subotica, Serbia, 8–10 September 2011; pp. 241–245. [Google Scholar]
- Reiter, M.; Wehr, M.; Abel, D. Built-in HiL simulator: A concept for faster prototyping of navigation-and communication-based control systems. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 1363–1369. [Google Scholar]
- Zinchenko, S.; Mateichuk, V.; Nosov, P.; Popovych, I.; Solovey, O.; Mamenko, P.; Grosheva, O. Use of simulator equipment for the development and testing of vessel control systems. Electr. Control Commun. Eng. 2020, 16, 58–64. [Google Scholar] [CrossRef]
- Roncin, K.; Kobus, J.M. Dynamic simulation of two sailing boats in match racing. Sport. Eng. 2004, 7, 139–152. [Google Scholar] [CrossRef]
- Roncin, K. Simulation dynamique de la navigation de deux voiliers en interaction. Ph.D. Thesis, Ecole Centrale de Nantes (ECN), Nantes, France, 2002. [Google Scholar]
- Box, G.E.; Hunter, W.H.; Hunter, S. Statistics for Experimenters; John Wiley and Sons: New York, NY, USA, 1978; Volume 664. [Google Scholar]
- Masuyama, Y.; Nakamura, L.; Tatano, H.; Takagi, K. Dynamic performance of sailing cruiser by full-scale sea tests. In Proceedings of the SNAME 11th Chesapeake Sailing Yacht Symposium. OnePetro, Annapolis, MD, USA, 10–11 June 1993. [Google Scholar]
- Claughton, A. Developments in the IMS VPP Formulations. In Proceedings of the SNAME 14th Chesapeake Sailing Yacht Symposium, Annapolis, MD, USA, 29–30 January 1999; pp. 1–20. [Google Scholar]
- Claughton, A.; Fossati, F.; Battistin, D.; Muggiasca, S. Changes and development to sail aerodynamics in the ORC international handicap rule. In Proceedings of the 20th International Symposium on Yacht Design and Yacht Construction, Amsterdam, The Netherlands, 17–18 November 2008. [Google Scholar]
- Teeters, J.; Ranzenbach, R.; Prince, M. Changes to sail aerodynamics in the IMS rule. In Proceedings of the SNAME 16th Chesapeake Sailing Yacht Symposium, Annapolis, MD, USA, 10–11 June 2003. [Google Scholar]
- ORC. ORC Vpp Documentation; Technical Report; Offshore Racing Council: Livorno, Italy, 2021. [Google Scholar]
- Angelou, M.; Spyrou, K. Dynamic stability assessment of yacht downwind sailing in regular waves. Appl. Ocean Res. 2021, 111, 102651. [Google Scholar] [CrossRef]
- Thomas, G.; Harris, D.; d’Armancourt, Y.; Larkins, I. The performance and controllability of yachts sailing downwind in waves. In Proceedings of the 2nd International Conference on High Performance Yacht Design, Auckland, New Zealand, 14–16 February 2006; pp. 145–152. [Google Scholar]
- Harris, D.; Thomas, G.; Renilson, M. Downwind performance of yachts in waves. In Proceedings of the 2nd Australian Sailing Science Conference, Hobart, Tasmania, 1–2 February 1999. [Google Scholar]
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015. [Google Scholar]
- van Oossanen, P. Theoretical estimation of the influence of some main design factors on the performance of international twelve meter class yachts. In Proceedings of the 4th Chesapeake Sailing Yacht Symposium, Annapolis, MD, USA, 20 January 1979. [Google Scholar]
- Leloup, R.; Roncin, K.; Bles, G.; Leroux, J.B.; Jochum, C.; Parlier, Y. Kite and classical rig sailing performance comparison on a one design keel boat. Ocean Eng. 2014, 90, 39–48. [Google Scholar] [CrossRef]
- Roncin, K.; Kobus, J.M.; Iachkine, P.; Barré, S. Méthodologie pour la validation du simulateur de voilier par des essais en mer, une première tentative. In Proceedings of the Workshop Science-Voile. École Navale, Lanvéoc, France, 1–10 May 2005; pp. 1–10. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Task | Period (s) |
|---|---|
| Data logging | 5.0 |
| GPS reading | 10.0 |
| Wind vane reading | 5.0 |
| Compass reading | 0.5 |
| Rudder control | 1.0 |
| Course selection | 60.0 |
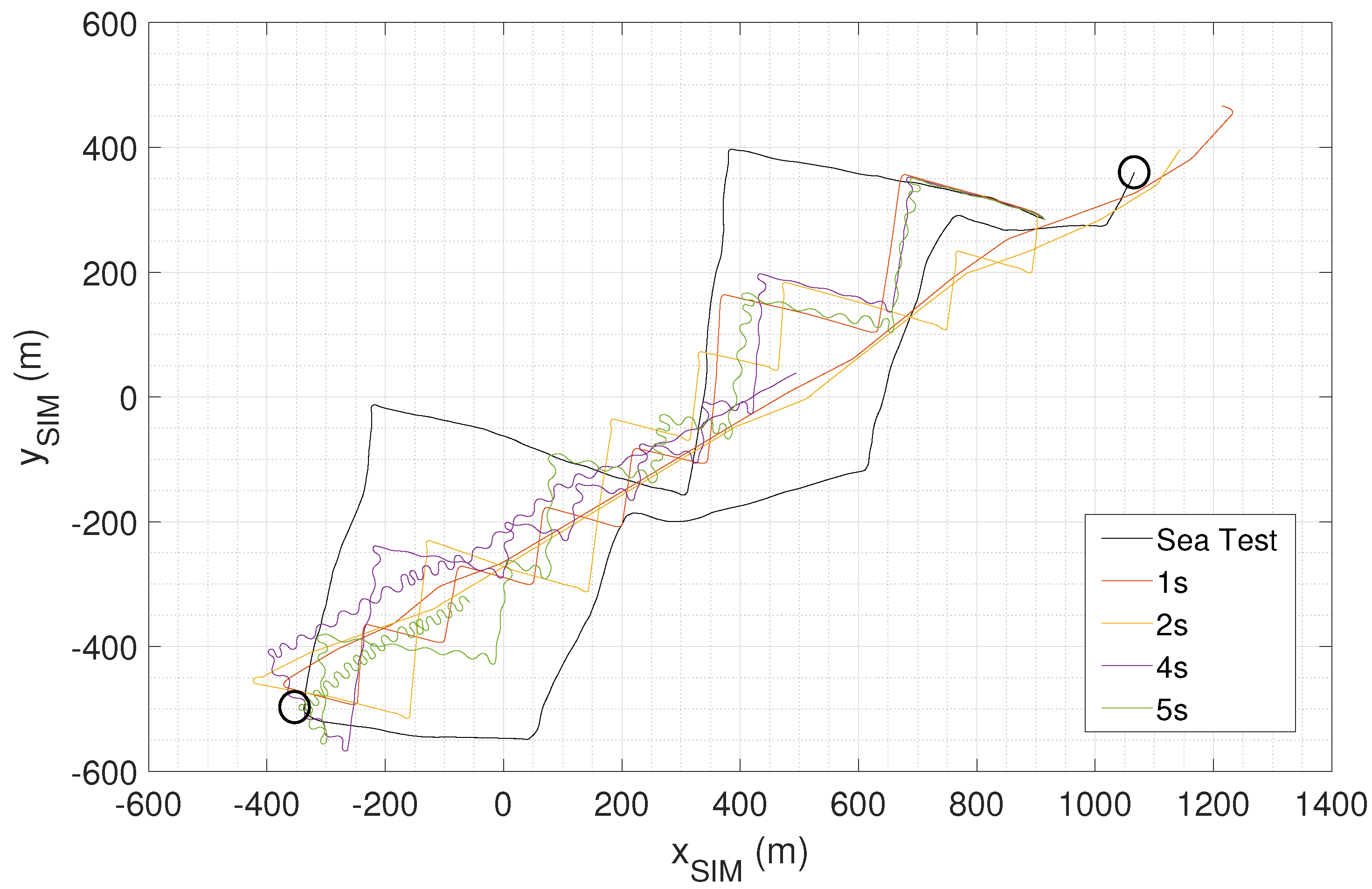
| Compass Refresh Period (s) | Waypoint 1 (s) | Waypoint 2 (s) |
|---|---|---|
| 1.0 | 912.7 | 1712.1 |
| 2.0 | 932.9 | 1782.6 |
| 4.0 | 1178.0 | - |
| 5.0 | 1390.8 | - |
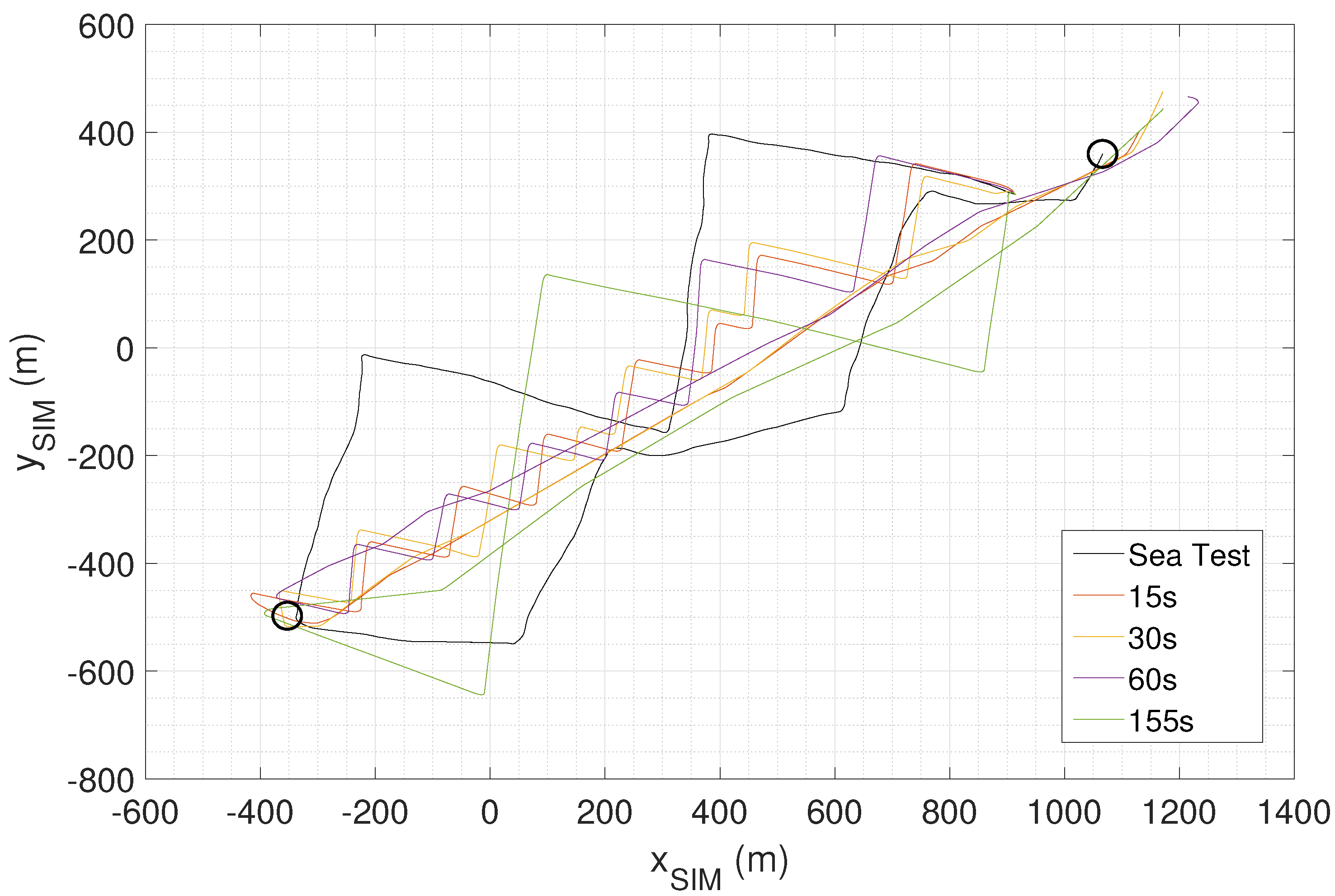
| Course Refresh Period (s) | Waypoint 1 (s) | Waypoint 2 (s) |
|---|---|---|
| 15.0 | 986.5 | 1772.4 |
| 30.0 | 930.9 | 1731.7 |
| 60.0 | 912.7 | 1712.1 |
| 155.0 | 894.7 | 1742.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akiyama, T.; Roncin, K.; Bousquet, J.-F. A Hardware-in-the-Loop Simulator to Optimize Autonomous Sailboat Performance in Real Ocean Conditions. J. Mar. Sci. Eng. 2023, 11, 1104. https://doi.org/10.3390/jmse11061104
Akiyama T, Roncin K, Bousquet J-F. A Hardware-in-the-Loop Simulator to Optimize Autonomous Sailboat Performance in Real Ocean Conditions. Journal of Marine Science and Engineering. 2023; 11(6):1104. https://doi.org/10.3390/jmse11061104
Chicago/Turabian StyleAkiyama, Tanaka, Kostia Roncin, and Jean-Francois Bousquet. 2023. "A Hardware-in-the-Loop Simulator to Optimize Autonomous Sailboat Performance in Real Ocean Conditions" Journal of Marine Science and Engineering 11, no. 6: 1104. https://doi.org/10.3390/jmse11061104
APA StyleAkiyama, T., Roncin, K., & Bousquet, J.-F. (2023). A Hardware-in-the-Loop Simulator to Optimize Autonomous Sailboat Performance in Real Ocean Conditions. Journal of Marine Science and Engineering, 11(6), 1104. https://doi.org/10.3390/jmse11061104