2. Proposed Localization Solution
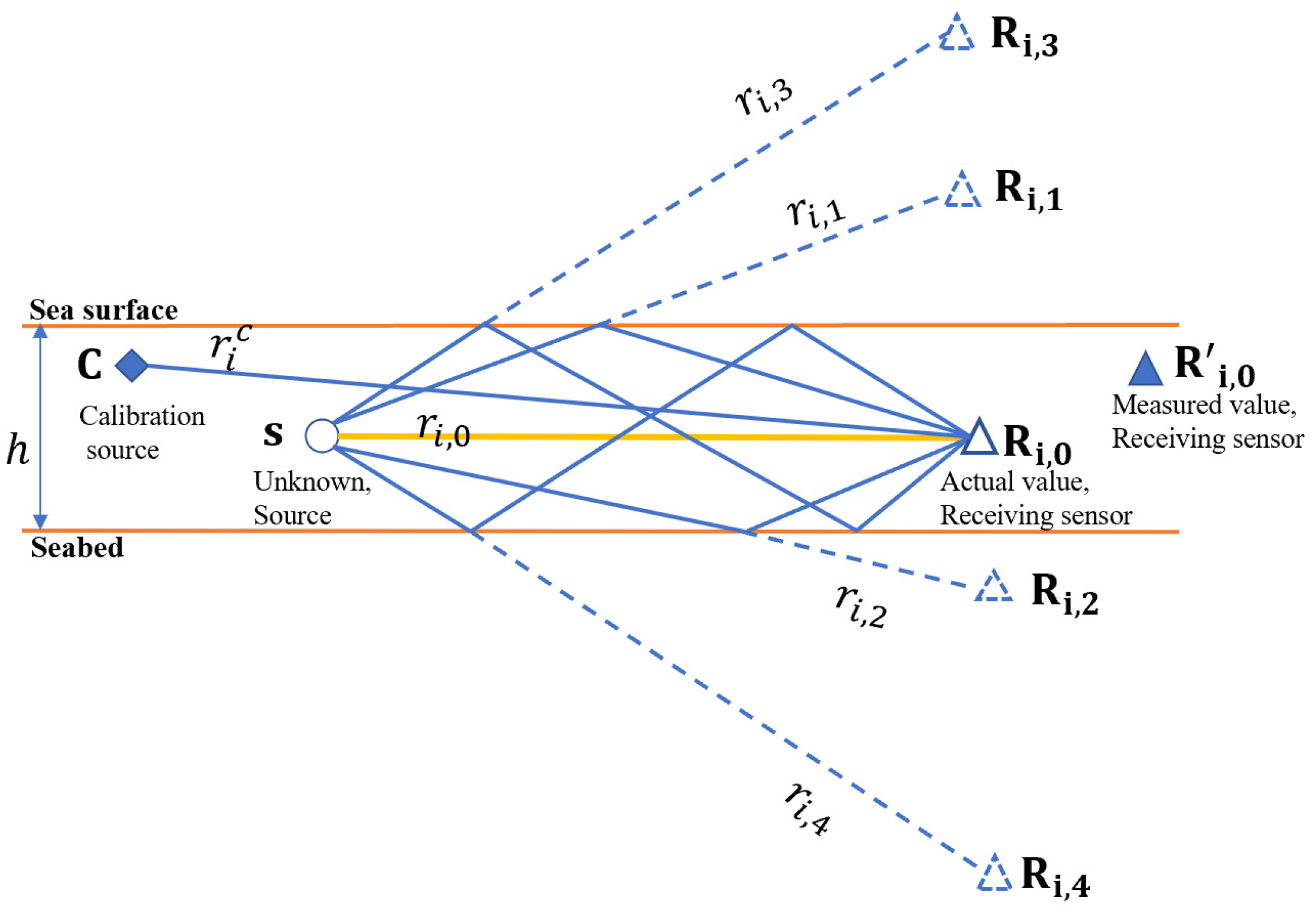
In the real marine environment, the signals transmitted by unknown sources reach the receiving sensors through multiple channels such as linear propagation and sea-surface and seabed reflection.
In theory, the number of multipath signals tends to be infinite, but after multiple reflections, the signal energy loss is often very serious and cannot be detected at the receiving sensor. Moreover, it is not conducive to the extraction of TDOA information; therefore, this paper only considers the primary and secondary reflections.
Figure 1 shows the propagation model.
The virtual sensor positions in
Figure 1 can be considered as the mirror image of the real sensor positions regarding the sea surface and the seabed.
As shown in
Figure 1, a single unknown source is located at
, and M receiving sensors are actually located at
, but in practice
is unknown, and we can only obtain the measured value
with position error
.
represents the position of the virtual sensor corresponding to the primary and secondary reflections of the sea surface and the seabed, and
denotes the distance between the sound source and the i-th sensor. Similarly,
is the distance between the calibration source at
and the i-th sensor.
In this paper, is used as the reference sensor, only the TDOA that reaches the direct meridian signal is calculated, and the multipath signal is taken at the other receiving sensors.
Assuming that
is an unknown source signal, the multipath signal received by the sensor can be written as
where
represents the attenuation coefficient of the
-th path,
represents the delay of the
-th path,
is the number of multipaths, and
represents the noise function. In this paper,
is assumed to be zero mean Gaussian white noise and is independent of
.
The TDOA value can be obtained by taking the direct path signal
in the received signal
of the sensor as the reference signal and calculating the cross-correlation between the direct path signal and each multipath signal. The cross-correlation function between the signals is
where
and
represent the expected and complex conjugate of the function, respectively, and A is the autocorrelation function of the signal
.
From Equation (2), the measured value of TDOA can be calculated as
where
is the TDOA measurement error and
. The corresponding range difference of arrival (RDOA) value is
where
indicates the sound propagation speed,
,
,
is the Euclidean distance norm, and
denotes the RDOA measurement error.
4. Proposed Localization Solution
In this section, a closed-form localization algorithm is derived using underwater multipath signals combined with a single calibration source. Compared with the traditional nonmultipath iterative method, this method greatly improves the localization performance of the algorithm by adding virtual array elements, reduces the amount of calculation, avoids the divergence of the algorithm or falling into the local optimal solution caused by the inappropriate initial value, and reaches CRLB accuracy when the noise is relatively small.
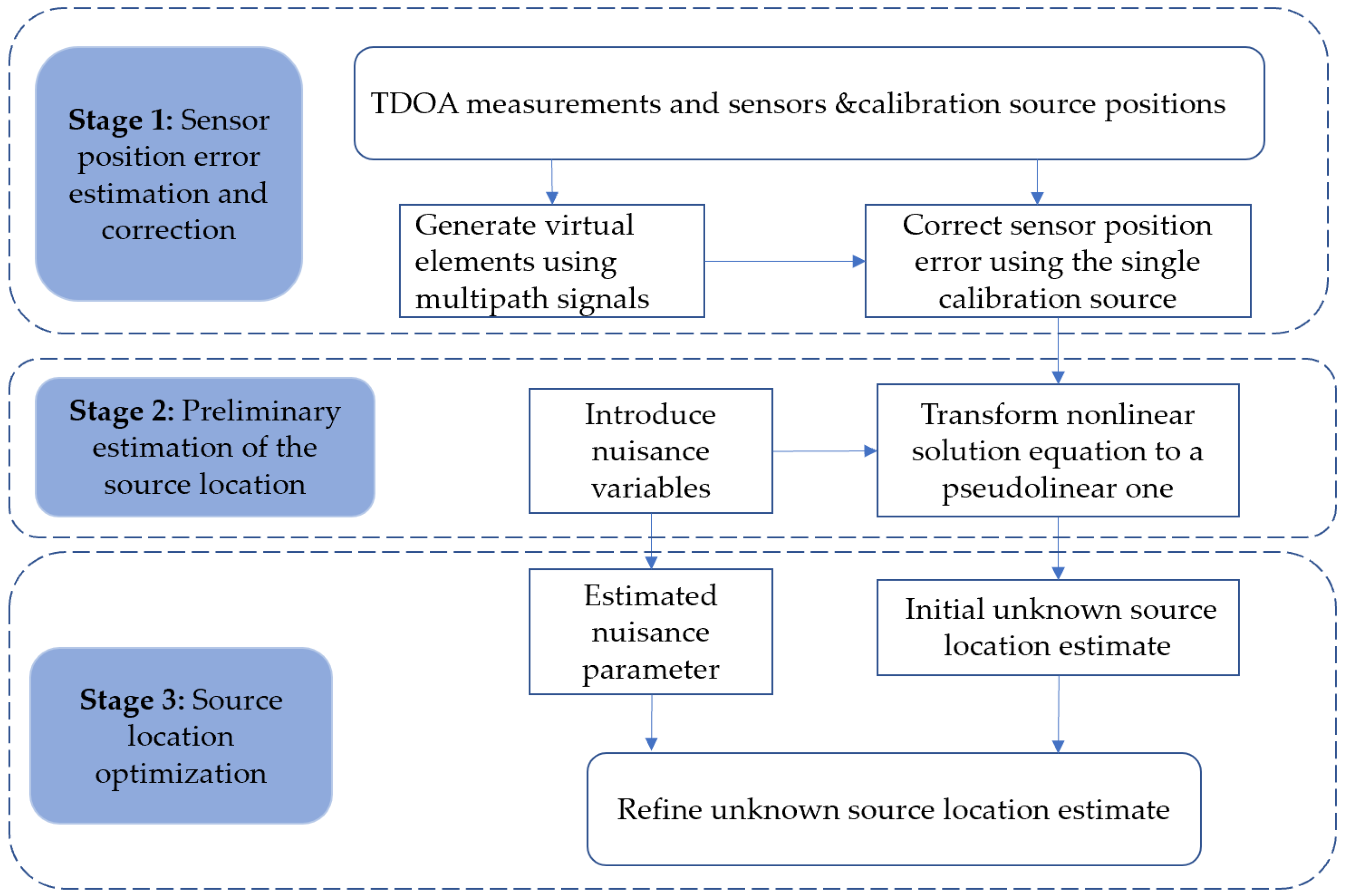
The method proposed in this paper solves the nonlinear localization problem using the following three steps. First, the number of virtual sensors is increased through the introduction of multipath signals, and the sensor position error is corrected by the calibration source. Second, the nuisance variables are introduced to transform the nonlinear equations into pseudolinear equations for the solution. Finally, the estimation position of the unknown source is further optimized by improving the estimation accuracy of the interference variable. The implementation process of unknown source localization is shown in
Figure 2.
Step 1: Sensor position error estimation and correction
In the localization case of this paper, the measured sensors are located at and , and their corresponding virtual sensors that pass the primary and secondary reflections of the sea surface and the seabed are located at , , , and , respectively.
Combining Equations (7) and (8) above, we arrive at
In this paper, the true position
of the sensors is unknown, and we can only obtain
with the position error. For the above highly nonlinear function of the unknown, let us linearize
and
by using the Taylor series expansion up to the linear term
The RDOA error
caused by sensor position error can be expressed as
Equation (19) can be rewritten in a matrix form as
where on the right side is
and on the left side is
From the Bayesian linear model [
32], because
and
are independent of
, the linear minimum mean square error solution to Equation (20) is
The estimation error in this step is
so that
The receiving sensors after position calibration are at
It can be easily concluded that Equation (9) is a positive semidefinite matrix, indicating that the multipath calibration TDOA measurement method can improve the sensor position error.
Step 2: Preliminary estimation of the source location
After rewriting the RDOA (4) as
, squaring both sides, substituting
and
, and ignoring the second-order noise terms form, after simplification we obtain
Arrange the error items on the right side of the equation:
The true values
and
of Equation (29) are unknown. Combining Equations (6), (24) and (26), we can obtain
Taking Equation (30) into (9), expanding it at
by using the Taylor series, and ignoring the second-order error terms, we can obtain
where
. Classifying the error items of Equation (31), we obtain
We define the unknown vector
, assume that
and
are independent, and form a set of linear equations
where
is a diagonal matrix with a diagonal element
,
,
is an (M-1)L-dimensional vector with
as the element,
is a diagonal matrix with diagonal element
,
is an (M-1)L-dimensional vector
, and
.
The weighted least squares (WLS) estimate for Equation (33) is
where
is the weighting matrix:
When the measurement noise is small relative to the true value, the noise effect in
,
, and
can be ignored. The estimation error of
is
so that
In practice, is actually unknown. We set , obtain the initial estimate of from Equation (34) and the updated sensor position using Equation (26), generate again, and calculate the improved estimate of . We can repeat the above process two or three times to obtain better .
The solution in this step does not consider the relationship between and , and the precision of cannot reach the best CRLB performance. The next step is to explore this relationship to improve the localization performance of the algorithm.
Step 3: Source location optimization
From the result of the previous stage, we can express
as
where
represents the first three elements of
and
is the estimation error of
.
In this localization scenario, when ignoring the second-order error terms,
The fourth element of
can be expressed as
We can obtain a set of linear equations
where on the right side is
and on the left side is
The WLS estimate for Equation (45) is
and the weighting matrix is
When the estimation error of
is relatively small such that the noise in
is negligible, the estimation error of the third stage is given by
Finally, the source position is obtained by
After ignoring the second-order term, the localization error of the proposed method can be expressed as
where
Algorithm 1 summarizes the proposed closed-form estimator.
For the 3D positioning scenario considered in this paper, it can be shown that the accuracy of the improved sensor position vector obtained by the proposed method can reach the CRLB. Due to the introduction of multipath signals, only two sensors are needed to obtain an accurate sound source estimation position.
| Algorithm 1: The proposed closed-form estimator |
| Input: Sensor position parameters
and
, a set of measurements TDOA, sea depth
, the sound propagation speed
, covariance matrix
|
| Output: Corrected values of sensor positions
and estimated value
of single sound source location
|
|
First step processing:
|
|
1: Obtain the virtual sensor positions
|
|
2: Calculate the corrected sensor position vector
|
|
Second step processing:
|
|
3: Initialize
and then update
|
|
4: For to N (N is the number of iterations)
|
|
5: Obtain
using (34)
|
| 6: substitute in (35) to update |
| 7: End For |
|
Third step processing:
|
|
8: Compute
by (37)
|
|
9: Calculate
and obtaining
using (47).
|
|
10: For to N (N is the number of iterations)
|
|
11: compute
from (46)
|
|
12: applying (46) to generate the estimates;
|
| 13: substitut in (35) to update |
|
14: Compute
by (50)
|
|
15: End For |
5. Performance Analysis
This section evaluates the performance of the three-step method proposed in this paper and proves that the algorithm is valid in the near-field condition and in relatively small noise conditions.
The positioning geometry model of TDOA determines the limitation of near-field conditions. By comparing the absolute time difference between the signal and each sensor, a hyperbola can be obtained, with a pair of sensors as the focus and the distance difference as the long axis. The intersection point of the hyperbola is the location of the unknown source. More specifically, if the ratio between the distance from the target to the sensor array and the baseline is greater than 58 and if the angle between the signal sent from the target and the two ends of the sensor array is less than 1 degree, the target is located in the far field [
33]. For far-field sources, the wave front turns to linear because it is too far away from the sensor. The hyperbolic arcs from the sensor pairs become almost parallel and intersect at very small angles. In this case, the TDOA algorithm is invalid.
According to the partitioned matrix inversion formula [
33] and the
given in Equation (16), we obtain
Bringing Equations (49) and (47) into the second line in Equation (53), we obtain
According to Equation (35)
For simplicity, let
where
We transform and approximate the form of to compare the covariance matrix with .
Putting
,
of Equation (33),
of Equation (44),
of Equation (45), and
of Equation (52) into Equation (59), respectively, we obtain
When
and noise is small, we obtain
According to Equations (33) and (21), we obtain
Therefore, we can summarize three conditions, namely (i) the near-field condition, (ii) , and (iii) the low-noise condition.
When the above three conditions are satisfied, the above derivation is valid. The near-field condition indicates that the unknown sound source is close to the sensors, and in practice the sensor nearest to the unknown source is often selected as the reference source.
6. Simulation Results and Discussion
The performance of the proposed method is evaluated through different simulations with the aim of verifying the theoretical results and comparing the proposed method with the CRLB and similar methods [
29] without considering multipath signals. All positioning scenarios are set in a 3D underwater space, with a water depth of
, an acoustic propagation speed of
, the unknown acoustic source located at
, and M sensors at
. The TDOA measurements are generated by adding zero mean white Gaussian noise to the true values with covariance
and
. The mean squared error (MSE) is used as the standard for this performance evaluation and is defined as
, where
is the number of Monte Carlo ensemble runs and
is the estimate of the acoustic source position at ensemble
.
We simulated the algorithm presented in this paper using MATLAB and compared its performance with that of existing algorithms.
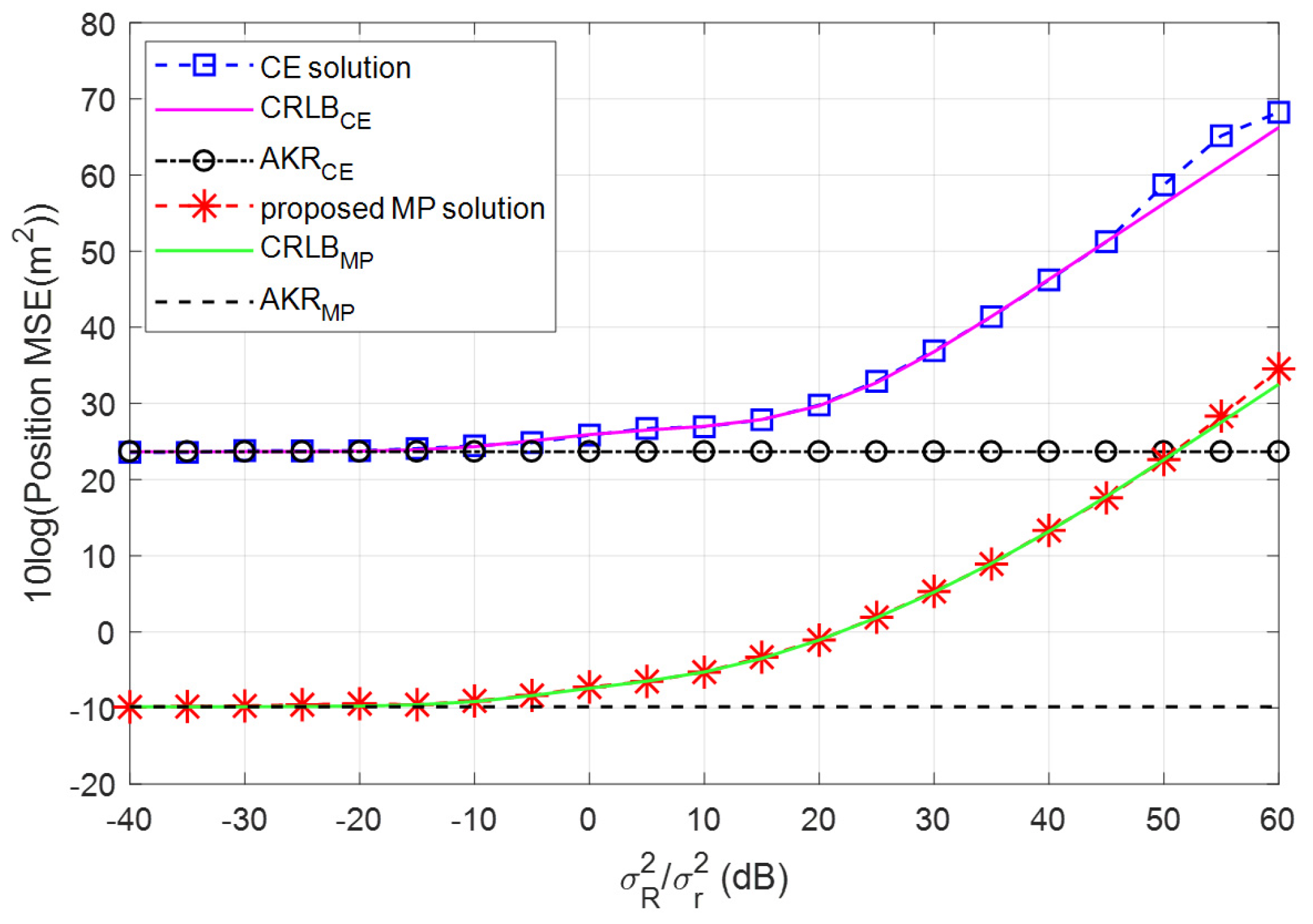
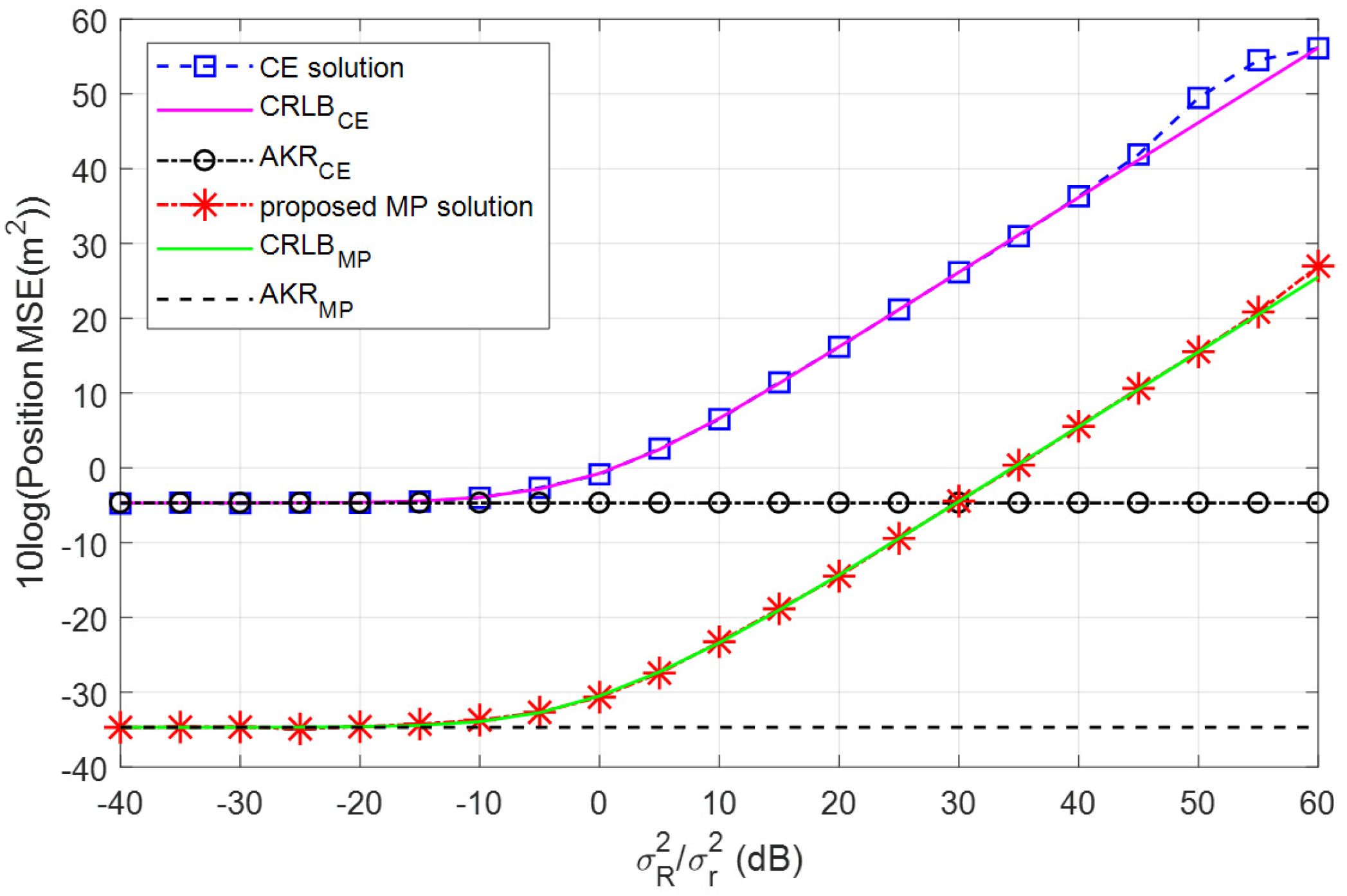
Simulation 1. A far underwater acoustic target and a near calibrated source.
Figure 3 shows the performance of the proposed multipath (MP) solution and CE solution [
29] as the value of the sensor position error
increases, where the distant unknown underwater acoustic source is located at
and the near calibration source is located at
. For the convenience of comparison, the CRLB when the sensor position is accurately known (marked with AKR) is also presented.
The proposed MP closed form and CE solutions follow the CRLB performance well until . The thresholding effect occurs earlier in the CE method, which is due to the nonlinear nature of the estimation problem.
Table 1 displays the percentage efficiency of CE and MP methods across diverse noise levels in the scenario of Simulation 1. Efficiency is defined as the ratio of the estimated positioning error to the CRLB. The results reveal that the efficiency ratio of CE and MP algorithms can exceed 90% under low−noise conditions. However, as the noise level and the CRLB escalate, the algorithm’s efficiency percentage declines, and, the CE’s localization efficiency abruptly drops under moderate noise due to the thresholding effect.
Notably, as the sensor position error increases, the MP method always provides an improvement of about 20 dB in localization performance. This is attributable to the introduction of virtual sensors and source calibration in the MP method, which greatly reduces the CRLB of the multipath method and hence significantly improves localization performance.
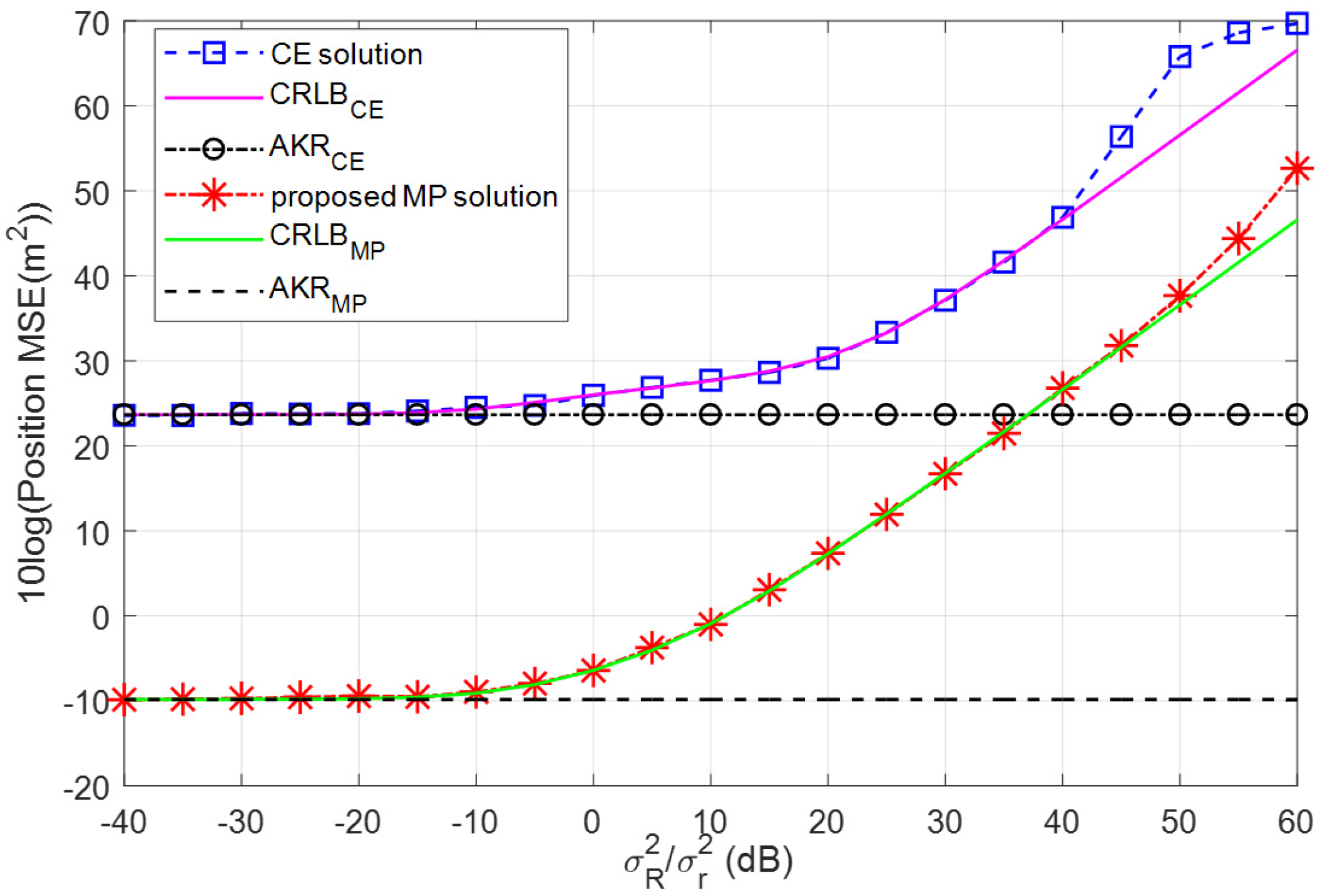
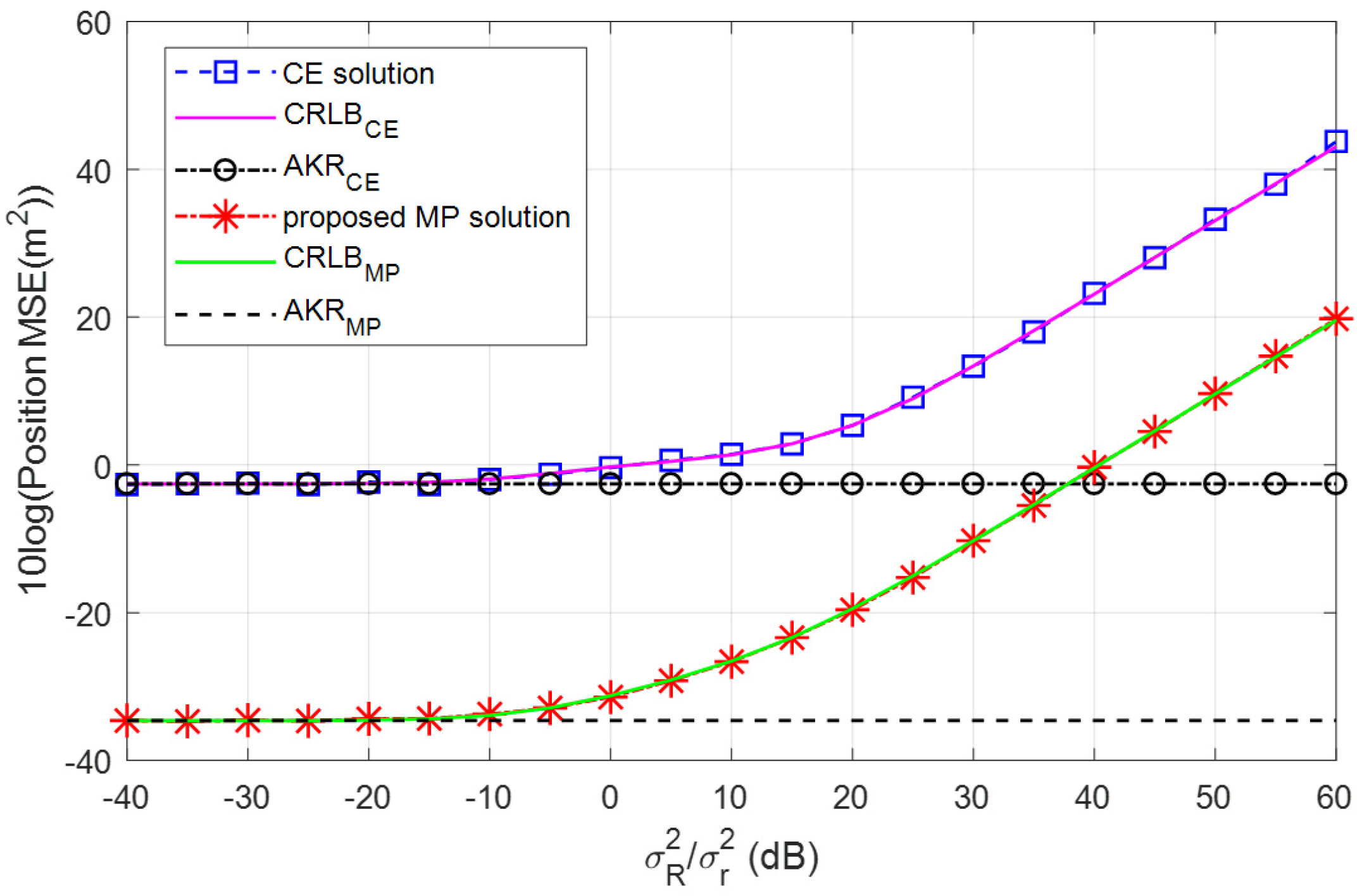
Simulation 2. A far underwater acoustic target and a far calibrated source.
The conditions shown in
Figure 4 are consistent with those shown in
Figure 3 except that the calibration source is located at
, farther away from the underwater acoustic source. The proposed multipath and CE solutions follow the performance well when the value is
. Moreover, the MP solution has better behavior in staying with the CRLB when the sensor position error is large, while the performance of the CE method suddenly deteriorates. This is because the calibration source is far away from the acoustic source, which greatly reduces the overall positioning accuracy, resulting in the thresholding effect that appears earlier compared to Simulation 1.
The results presented in
Table 2 demonstrate that in this simulation scenario, the MP method achieves a positioning efficiency of over 80% under moderate noise, which outperforms the CE algorithm by a considerable margin. This is due to the CE algorithm’s performance deterioration with increased distance from the calibration source, while the MP method offers distinct advantages. Moreover, the MP method exhibits better adherence to the CRLB and consistently maintains high efficiency, making it superior in the general trend.
Simulation 3. A near underwater acoustic target and a far calibration source.
Simulation 4. A near underwater acoustic target and a far calibration source.
Figure 5 and
Figure 6 compare the performance of the two algorithms when the target source is located at
closer to the sensor array and the calibration source is located at
and
, respectively. This again verifies that the estimated performance is better when the calibration source is closer to the underwater acoustic source. By comparing these two figures with
Figure 3 and
Figure 4, it can be seen that the performance of the near source is much better than that of the far source and that the thresholding effect appears later. The thresholding phenomenon here refers to the estimation performance that could suddenly deviate from the optimum accuracy defined by the CRLB when the noise level becomes large or when the source is moving away from the sensors. This is because the classical TDOA localization algorithm estimates the position of the target under the near-field assumption while the target is far away from the sensor network. As a result, the performance of the algorithm will deteriorate to varying degrees.
Table 3 and
Table 4 reveal that both the CE and MP algorithms exhibit high efficiency in the Simulations 3 and 4 scenarios, despite the rapid decline in the efficiency of the CE algorithm due to the threshold effect. The MP method exhibits an efficiency of over 90%, while the CE algorithm achieves an efficiency of more than 80% prior to the onset of the thresholding effect. It is important to note that the proposed algorithm in this paper outperforms other methods in terms of adhering to the CRLB by consistently maintaining a CRLB advantage of approximately 30 dB. These results suggest that the proposed algorithm is a more suitable choice for localization applications in these scenarios.
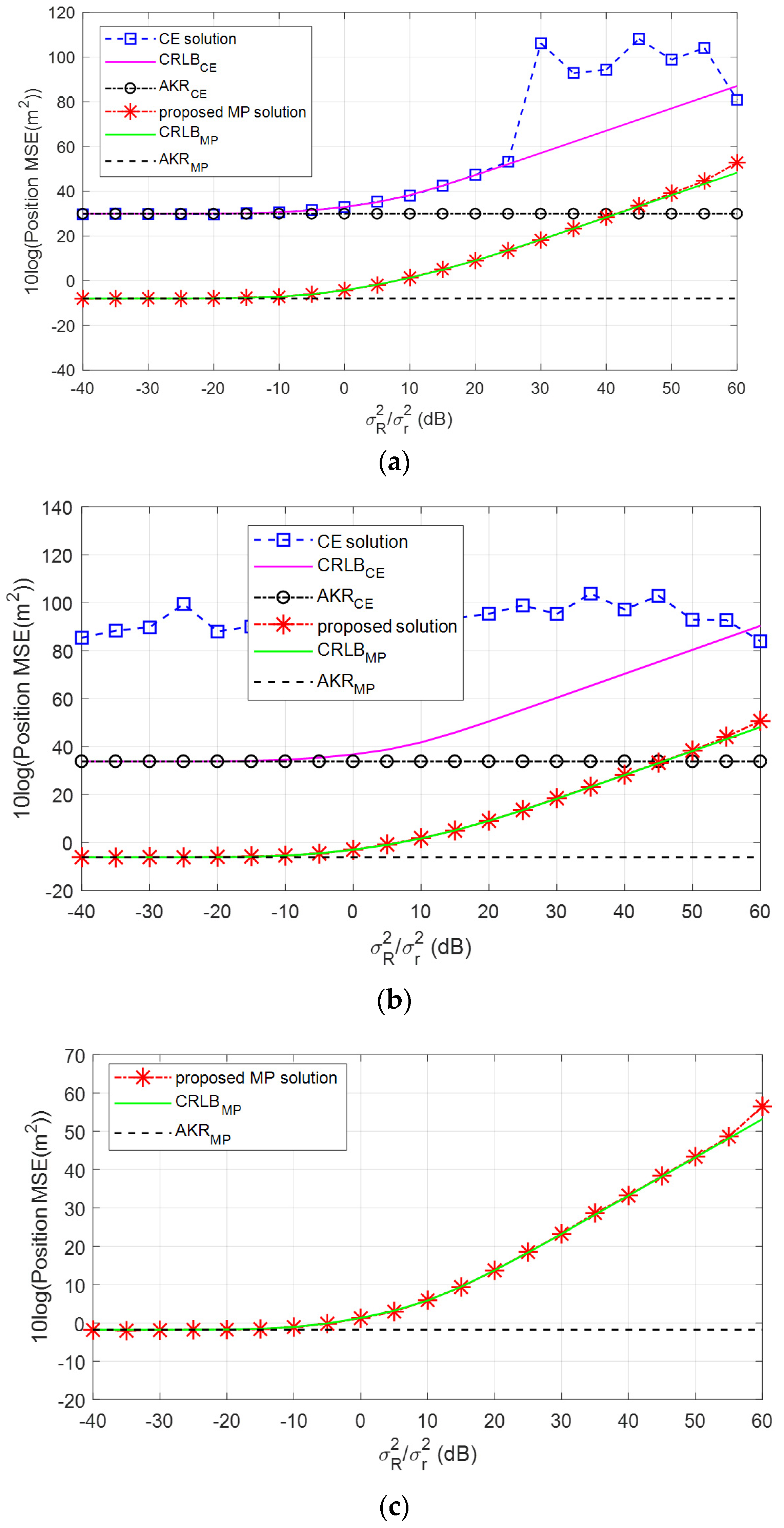
Simulation 5: Minimum number of sensors.
In this scenario, the target source is located at closer to the sensor array, with the near calibration source located at . We compare the performance of both algorithms using simulations for 5, 4, and 3 sensors.
As illustrated in
Figure 7, when the number of sensors is 5, the thresholding effect of the CE method appears when the sensor position error is very small. When the number of sensors is reduced to 4, the CE algorithm becomes inapplicable, as it fails to estimate the location of the sound source.
However, in sharp contrast, the MP method can follow the CRLB well in all three subgraphs, and ideal positioning performance can be achieved by using just 3 sensors due to the introduction of virtual sensors. This breaks the limitation that at least 5 sensors are required for TSWLS-based methods in a 3D space.
Table 5 shows that with a reduction in the number of sensors to 4 or 3, the CE algorithm becomes unsuitable for sound source localization, while the MP algorithm maintains an efficiency of over 90% in low noise and above 80% in moderate noise. This is because the CE algorithm relies on intermediate variables and requires at least 5sensors for accurate localization, whereas the MP algorithm utilizes virtual sensors to enhance TDOA measurement information, making it effective even with only 3 sensors and ensuring high localization efficiency.
7. Conclusions
This paper presents an improved UWAL multipath method using the WSL method based on TDOA measurements, which solves the problem of lack of observation data and floating sensor position in UWAL. The multipath method increased the number of sensors by using the multipath nature of the underwater environment. At the same time, a single calibration emission source with a known position is introduced to correct the sensor position and improve positioning accuracy.
In the first stage of the algorithm, multipath signals are introduced to increase the number of virtual elements, and a single calibration transmitting source is used to correct the sensor position error to obtain a more accurate sensor position. In the second stage, the nuisance variables are introduced to obtain the initial estimation of the underwater object. In the final stage, the performance of the estimator is improved by using the nonlinear relationship between the nuisance variables. The CRLB is also derived for the positioning scenario in this paper. Theoretical analysis and simulation confirm that the proposed algorithm can reach the CRLB at a low-noise level.
In addition, the proposed algorithm breaks through the limitation that the traditional TDOA algorithm needs at least four sensors for positioning in a 3D space. The proposed algorithm can locate the target with only three sensors, and the localization accuracy can still reach the CRLB under conditions of small noise.
In underwater localization scenarios, the accuracy of TDOA-based positioning systems can be significantly affected by the uncertainty of sound propagation speed. Since various factors such as temperature, pressure, and salinity affect underwater acoustic propagation speed, developing robust algorithms for real-time estimation of propagation speed based on environmental factors is a potential direction for future research. Machine learning techniques can also be incorporated into these algorithms to study the relationship between environmental factors and propagation speed and improve the accuracy of estimation. Another direction for future research is to investigate the impact of acoustic propagation speed uncertainty on the performance of TDOA-based positioning systems. Quantifying the influence of speed uncertainty on the accuracy of TDOA-based positioning systems can help in developing appropriate mitigation strategies to account for this uncertainty.
In summary, developing algorithms for real-time estimation of acoustic propagation speed and investigating the impact of acoustic propagation speed can contribute to enhancing the accuracy of TDOA-based positioning systems in underwater environments.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






