
User-Driven Design and Development of an Underwater Soft Gripper for Biological Sampling and Litter Collection
 ,
,  ,
,  and
and
Abstract
1. Introduction
1.1. The Importance and Challenges of Underwater Robotic Intervention
1.2. State of the Art on Underwater Grippers: From Rigid to Soft Solutions
2. Materials and Methods
2.1. From User Requirements to the Conceptual Design
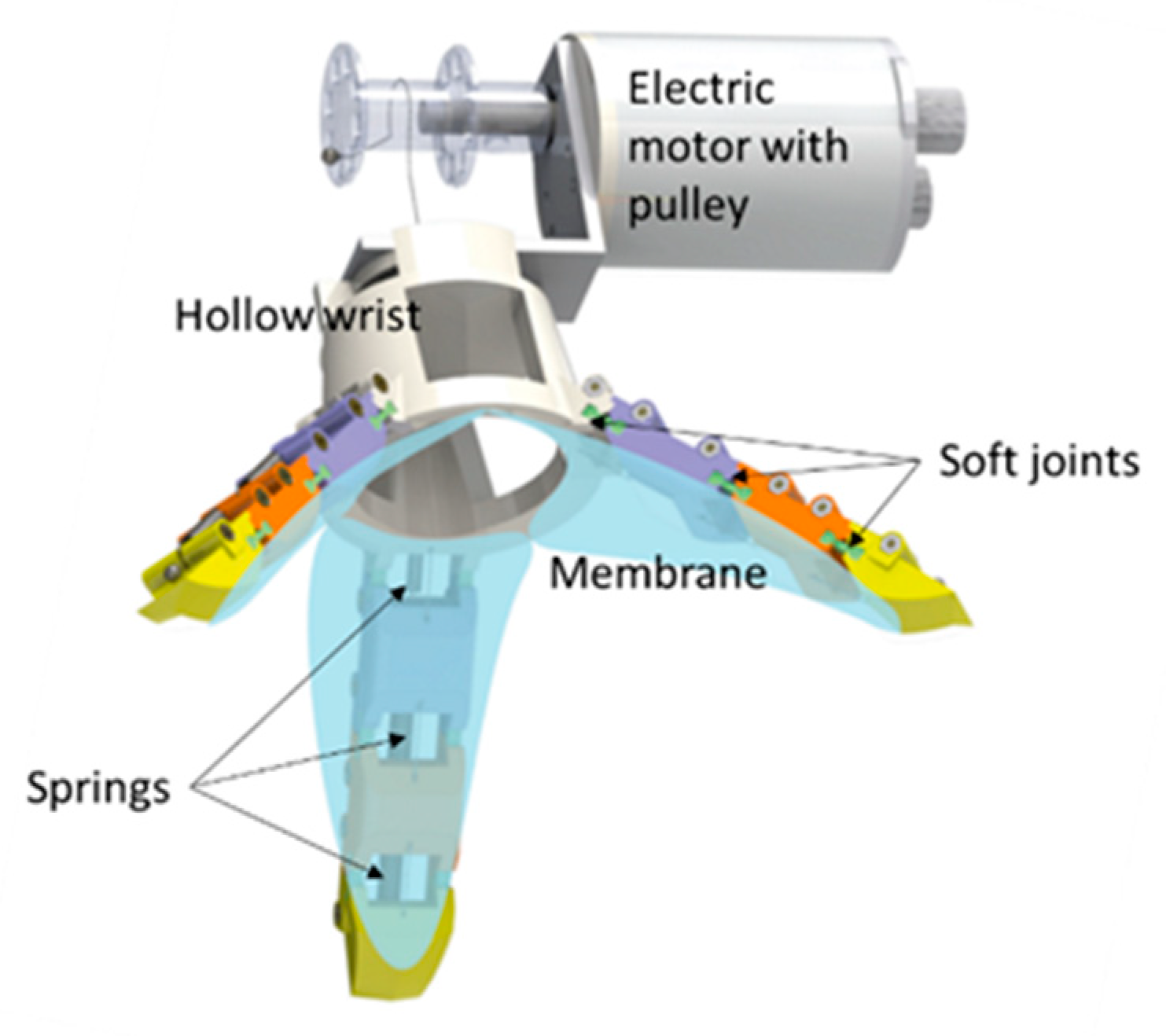
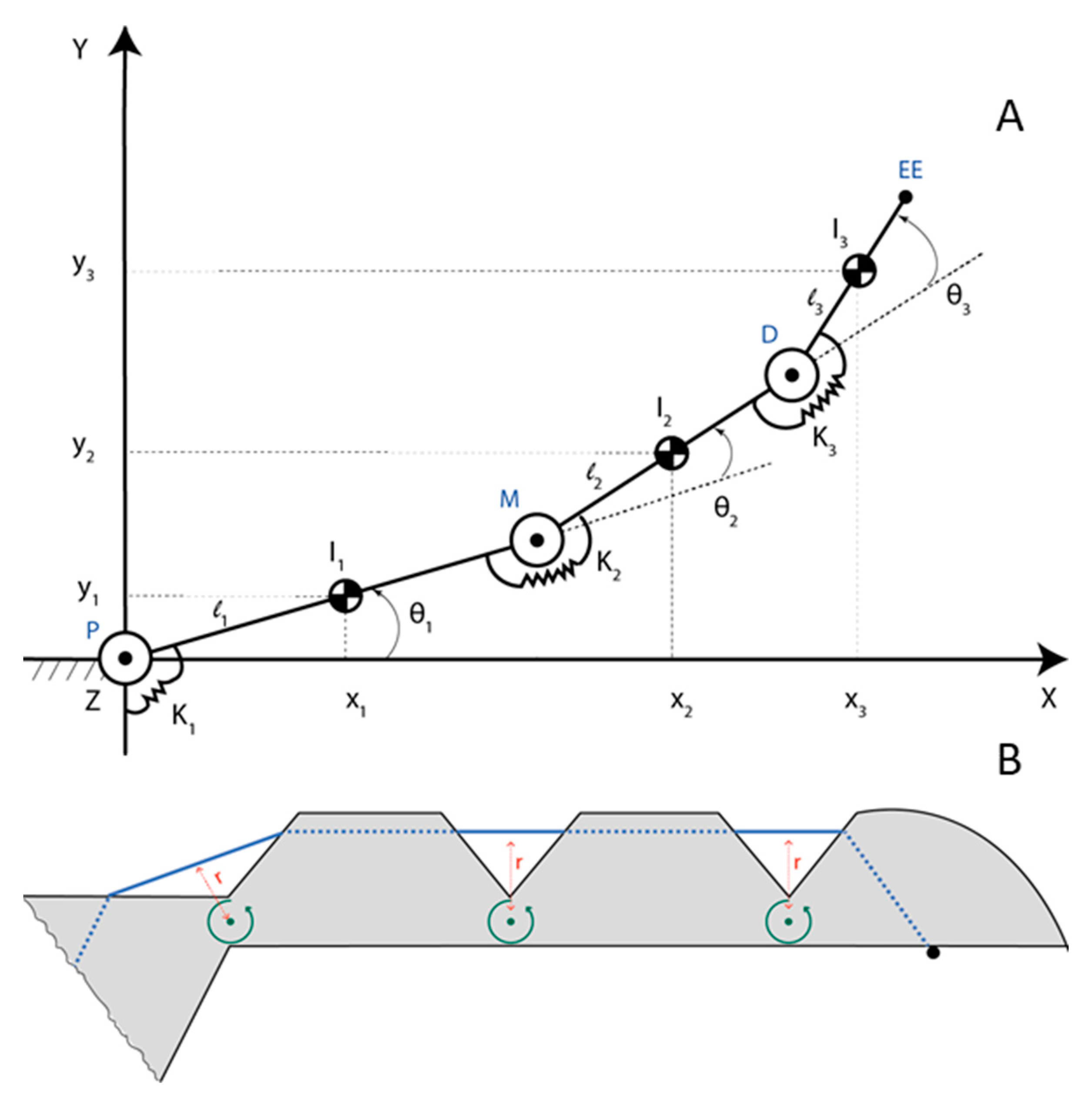
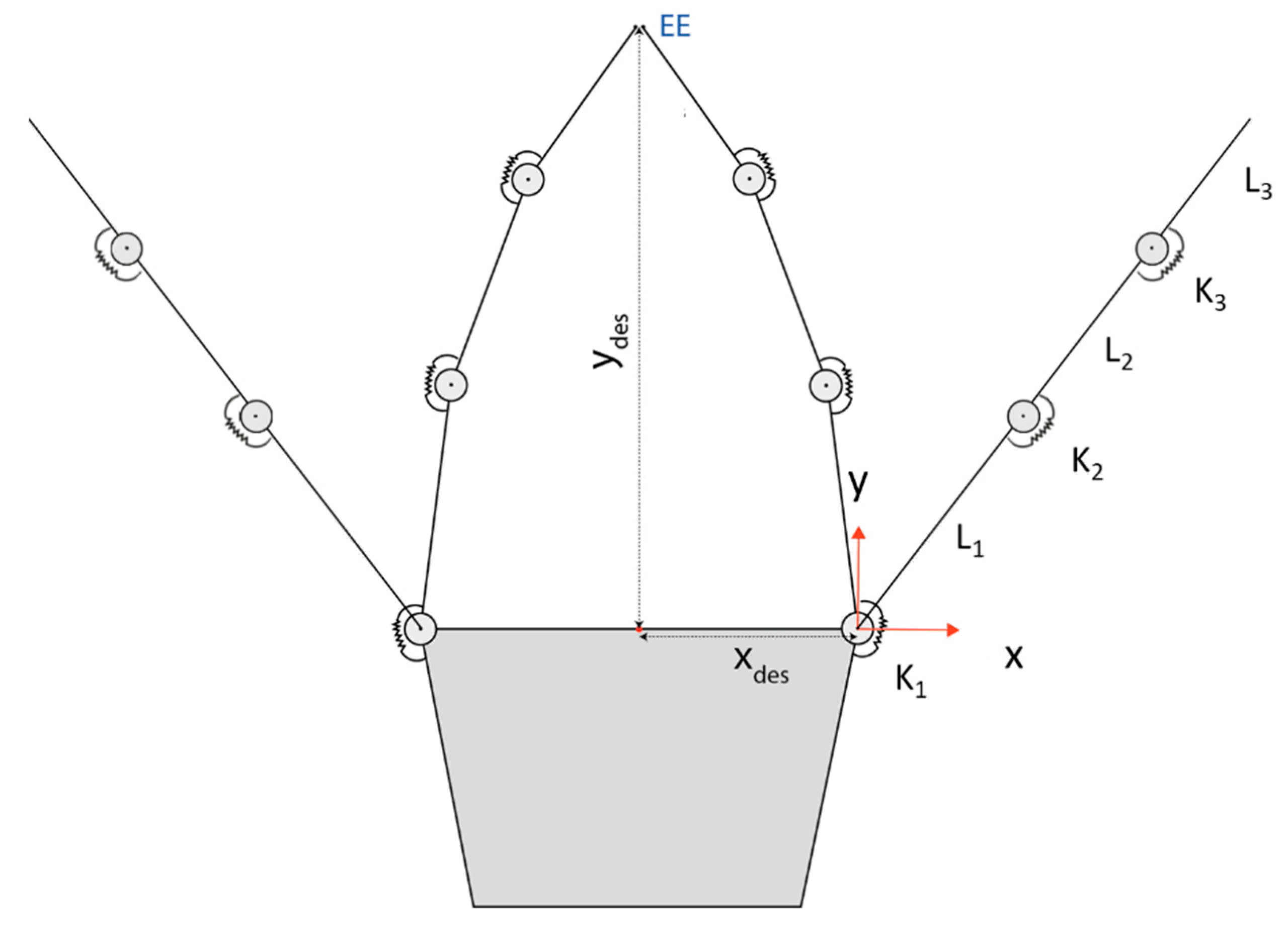
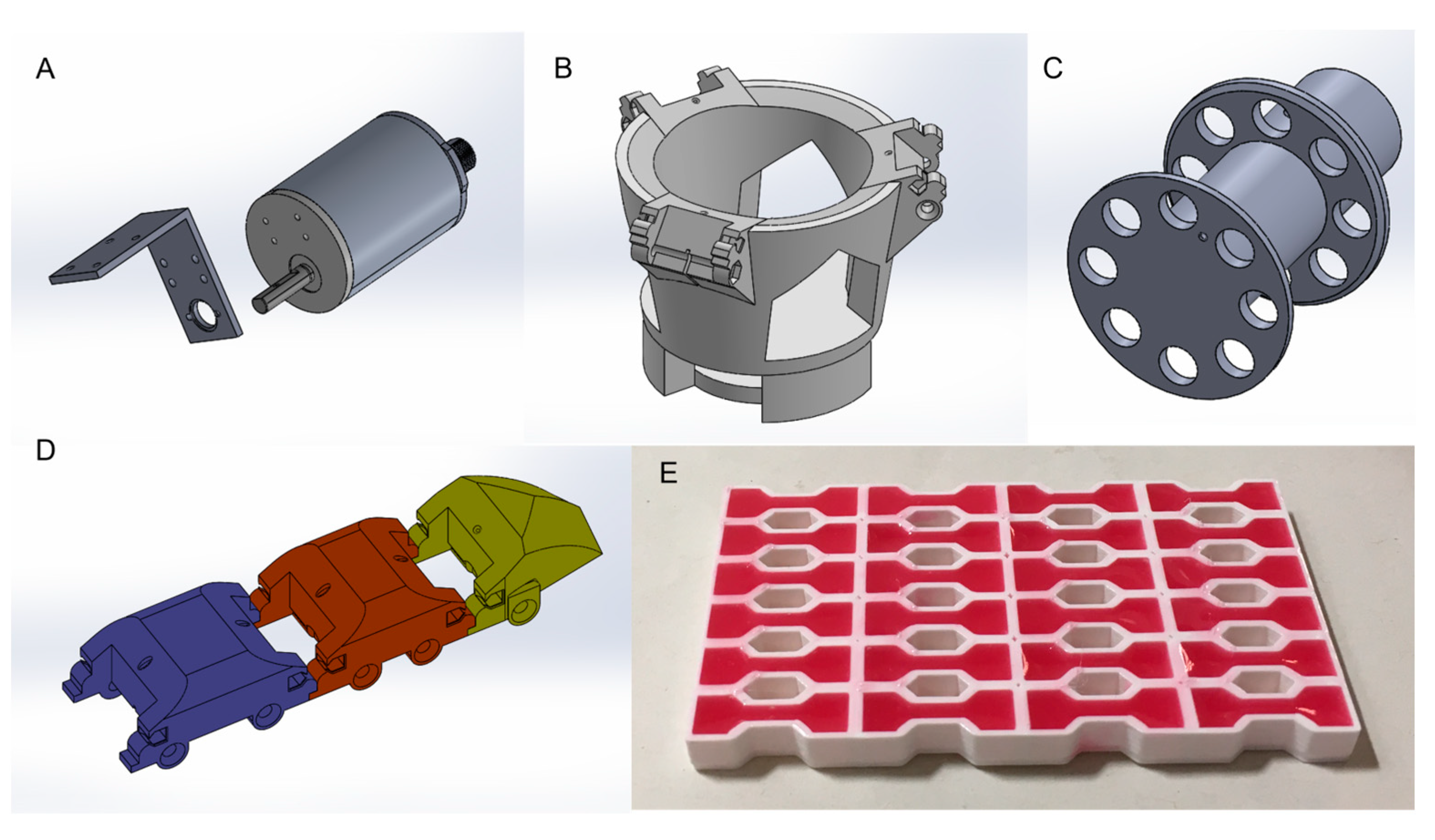
2.2. Mechanical Design and Fabrication
3. Results
3.1. Positioning Tests
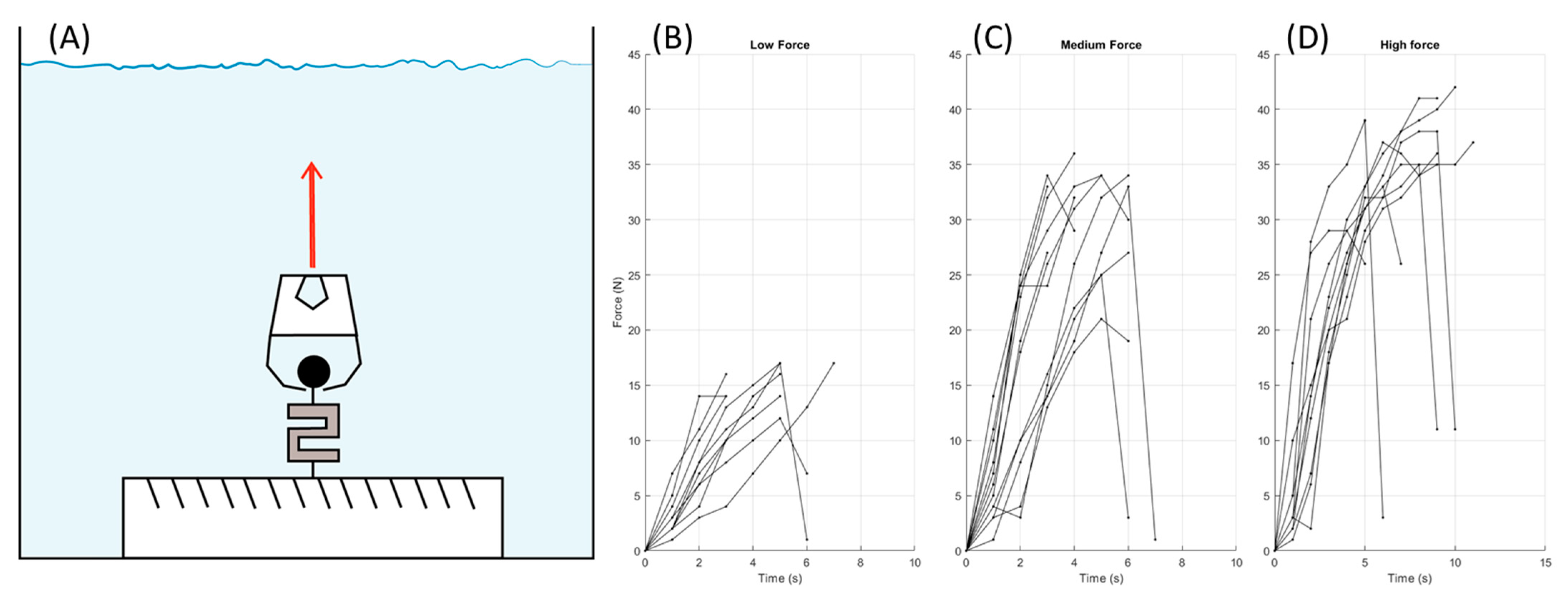
3.2. Pull-Out Tests
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Petillot, Y.R.; Antonelli, G.; Casalino, G.; Ferreira, F. Underwater Robots: From Remotely Operated Vehicles to Intervention-Autonomous Underwater Vehicles. IEEE Robot. Autom. Mag. 2019, 26, 94–101. [Google Scholar] [CrossRef]
- Directive 2008/56/EC of the European Parliament and of the Council of 17 June 2008 Establishing a Framework for Community Action in the Field of Marine Environmental Policy (Marine Strategy Framework Directive). Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex%3A32008L0056 (accessed on 28 March 2023).
- Huang, H.; Tang, Q.; Li, J.; Zhang, W.; Bao, X.; Zhu, H.; Wang, G. A review on underwater autonomous environmental perception and target grasp, the challenge of robotic organism capture. Ocean. Eng. 2020, 195, 106644. [Google Scholar] [CrossRef]
- Carrera, A.; Palomeras, N.; Hurtós, N.; Carreras, M. Free-floating panel intervention by means of Learning by Demonstration. IFAC-PapersOnLine 2015, 48, 38–43. [Google Scholar] [CrossRef]
- Oussama, K.; Xiyang, Y.; Gerald, B.; Brian, S.; Boyeon, K.; Shameek, G.; Hannah, S.; Shiquan, W.; Mark, C.; Aaron, E.; et al. Ocean one: A robotic avatar for oceanic discovery. IEEE Robot. Autom. Mag. 2016, 23, 20–29. [Google Scholar] [CrossRef]
- Mazzeo, A.; Aguzzi, J.; Calisti, M.; Canese, S.; Vecchi, F.; Stefanni, S.; Controzzi, M. Marine Robotics for Deep-Sea Specimen Collection: A Systematic Review of Underwater Grippers. Sensors 2022, 22, 648. [Google Scholar] [CrossRef] [PubMed]
- Teoh, Z.E.; Phillips, B.T.; Becker, K.P.; Whittredge, G.; Weaver, J.C.; Hoberman, C.; Gruber, D.F.; Wood, R.J. Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms. Sci. Robot. 2018, 3, eaat5276. [Google Scholar] [CrossRef] [PubMed]
- Sinatra, N.R.; Teeple, C.B.; Vogt, D.M.; Parker, K.K.; Gruber, D.F.; Wood, R.J. Ultragentle manipulation of delicate structures using a soft robotic gripper. Sci. Robot. 2019, 4, eaax5425. [Google Scholar] [CrossRef] [PubMed]
- Manti, M.; Hassan, T.; Passetti, G.; d’Elia, N.; Cianchetti, M.; Laschi, C. An Under-Actuated and Adaptable Soft Robotic Gripper. In Biomimetic and Biohybrid Systems: 4th International Conference, Living Machines 2015, Barcelona, Spain, 28–31 July 2015, Proceedings 4; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 64–74. [Google Scholar] [CrossRef]
- Mura, D.; Barbarossa, M.; Dinuzzi, G.; Grioli, G.; Caiti, A.; Catalano, M.G. A Soft Modular End Effector for Underwater Manipulation: A Gentle, Adaptable Grasp for the Ocean Depths. IEEE Robot. Autom. Mag. 2018, 25, 45–56. [Google Scholar] [CrossRef]
- Palli, G.; Moriello, L.; Scarcia, U.; Melchiorri, C. An Underwater Robotic Gripper with Embedded Force/Torque Wrist Sensor. IFAC-PapersOnLine 2017, 50, 11209–11214. [Google Scholar] [CrossRef]
- Stuart, H.; Wang, S.; Khatib, O.; Cutkosky, M.R. The Ocean One hands: An adaptive design for robust marine manipulation. Int. J. Rob. Res. 2017, 36, 150–166. [Google Scholar] [CrossRef]
- Galloway, K.C.; Becker, K.P.; Phillips, B.T.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F.; Shen, Z.; Zhong, H.; et al. Soft Robotic Grippers for Biological Sampling on Deep Reefs. Soft Robot 2016, 3, 23–33. [Google Scholar] [CrossRef] [PubMed]
- Backus, S.; Onishi, R.; Bocklund, A.; Berg, A.; Contreras, E.; Parness, A. Design and testing of the JPL-Nautilus Gripper for deep-ocean geological sampling. J. Field Robot. 2020, 37, 972–986. [Google Scholar] [CrossRef]
- Kumamoto, H.; Shirakura, N.; Takamatsu, J.; Ogasawara, T. Underwater Suction Gripper for Object Manipulation with an Underwater Robot. In Proceedings of the 2021 IEEE International Conference on Mechatronics (ICM), Kashiwa, Japan, 7–9 March 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Mazzeo, A.; Aguzzi, J.; Calisti, M.; Canese, S.; Angiolillo, M.; Allcock, A.L.; Vecchi, F.; Stefanni, S.; Controzzi, M. Marine Robotics for Deep-Sea Specimen Collection: A Taxonomy of Underwater Manipulative Actions. Sensors 2022, 22, 1471. [Google Scholar] [CrossRef] [PubMed]
- Gruber, D.F.; Wood, R.J. Advances and future outlooks in soft robotics for minimally invasive marine biology. Sci. Robot. 2022, 7, eabm6807. [Google Scholar] [CrossRef] [PubMed]
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5, eaaz1012. [Google Scholar] [CrossRef] [PubMed]
- Belhe, U.; Kusiak, A. The house of quality in a design process. Int. J. Prod. Res. 1996, 34, 2119–2131. [Google Scholar] [CrossRef]
- Guler, K.; Petrisor, D.M. A Pugh Matrix based product development model for increased small design team efficiency. Cogent Eng. 2021, 8, 1923383. [Google Scholar] [CrossRef]
- Birk, A.; Antonelli, G.; Di Lillo, P.; Simetti, E.; Casalino, G.; Indiveri, G.; Ostuni, L.; Turetta, A.; Caffaz, A.; Weiss, P.; et al. Dexterous Underwater Manipulation from Onshore Locations: Streamlining Efficiencies for Remotely Operated Underwater Vehicles. IEEE Robot. Autom. Mag. 2018, 25, 24–33. [Google Scholar] [CrossRef]
- Ullman, D.G. The Mechanical Design Process; McGraw Hill: New York, NY, USA, 1992; Volume 2. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Who | Now | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Team SILVER2 | Marine Scientist | Mission Operator | 1 = Poor | ||||||
| 5 = Excellent | |||||||||
| ● Stuart et al. [12] | |||||||||
| ■ Galloway et al. [13] | |||||||||
| ▲ Manti et al. [9] | |||||||||
| ✦ Mura et al. [10] | |||||||||
| ✻ Birk et al. [21] | |||||||||
| What | 1 | 2 | 3 | 4 | 5 | ||||
| Pre-mission | R1. Simple manufacturing | 5 | 2 | 2 | ✻ | ■ ✦ | ● | ▲ | |
| R2. Simple transportation | 7 | 3 | 6 | ✻ ■ | ● ▲ ✦ | ||||
| R3. Simple assembly | 6 | 3 | 6 | ✻ | ■ ✦ | ● | ▲ | ||
| R4. Handy | 8 | 4 | 6 | ■ | ● ✻ ✦ | ▲ | |||
| Mission | R5. Easy to use | 3 | 3 | 8 | ✦ ✻ | ● ■ ▲ | |||
| R6. Grasping different shapes | 4 | 6 | 3 | ✻ | ▲ | ■ ✦ | ● | ||
| R7. Collecting sand/sediment samples | 5 | 6 | 3 | ● ■ ▲ ✦ ✻ | |||||
| R8. Collecting biological samples | 4 | 8 | 3 | ✻ ▲ | ✦ ● | ■ | |||
| R9. Firm grasp | 7 | 6 | 7 | ✻ | ▲ ✦ | ● ■ | |||
| R10. Not damaging grasped objects | 6 | 7 | 4 | ✻ | ✦ | ● ■ ▲ | |||
| R11. Collecting stuck or anchored samples | 4 | 8 | 5 | ▲ | ✦ ✻ | ■ | ● | ||
| R12. Not damaging working environment | 4 | 8 | 4 | ✻ | ● ■ ▲ ✦ | ||||
| R13. Dexterous grasp | 4 | 5 | 7 | ▲ | ✻ ■ | ● ✦ | |||
| R14. Not getting stuck in the environment | 4 | 4 | 7 | ✻ | ● ✦ | ■ ▲ | |||
| R15. Long battery | 4 | 4 | 7 | ■ | ● ✦ ✻ | ▲ | |||
| R16. Not introducing pollutants | 4 | 7 | 3 | ■ ✻ | ● ▲ ✦ | ||||
| Post-mission | R17. Simple disassembly | 5 | 2 | 6 | ■ ✦ ✻ | ● | ▲ | ||
| R18. Simple ordinary maintenance | 6 | 6 | 6 | ✻ | ■ | ● ✦ | ▲ | ||
| R19. Simple extra-ordinary maintenance | 7 | 4 | 5 | ✻ | ● | ■ ✦ | ▲ | ||
| R20. Usable in different application scenarios | 3 | 4 | 2 | ■ ▲ | ● ✦ ✻ | ||||
| 100 | 100 | 100 | |||||||
| total ●: | 80 | ||||||||
| total ■: | 73 | ||||||||
| total ▲: | 71 | ||||||||
| total ✦: | 70 | ||||||||
| total ✻: | 54 | ||||||||
| 1. Replica of the Ocean One hand [13] with membranes | 2. Two-fingered gripper with hollow fingertips | 3. Gripper inspired to the carnivorous plant Dionaea muscipula | 4. Gripper with soft distal phalanges |
 |  |  |  |
| 5. Grab with soft claws actuated by an endless screw | 6. Cable-driven gripper inspired by crab claws | 7. Hydraulic soft gripper [13] | 8. Radially symmetric three-fingered gripper with hollow palm and membranes |
 |  |  |  |
| What | Who | Reference | Concept Design Ideas | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Team SILVER2 | Marine Scientist | Mission Operator | Ocean One Hand | (1) Ocean One Hand with Membranes | (2) Two-Fingered Gripper with Hollow Fingertips | (3) Carnivorous Plant Inspired Gripper | (4) Gripper with Soft Distal Phalanges | (5) Grab with Soft Claws and Endless Screw Actuation | (6) Crab Claw Inspirred Gripper with Cable-Driven Actuation | (7) Hydraulic Soft Gripper | (8) Radially Symmetric Gripper with Hollow Palm and Membranes | ||
| Pre-mission | R1. Simple manufacturing | 5 | 2 | 2 | Datum | −1 | −1 | −1 | 0 | 0 | −1 | −1 | −1 |
| R2. Simple transportation | 7 | 3 | 6 | 0 | 1 | 1 | 0 | 0 | 0 | 1 | 0 | ||
| R3. Simple assembly | 6 | 3 | 6 | −1 | 1 | 1 | −1 | −1 | 0 | 1 | −1 | ||
| R4. Handy | 8 | 4 | 6 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | ||
| Mission | R5. Easy to use | 3 | 3 | 8 | 0 | 0 | 0 | 0 | 0 | 0 | −1 | 0 | |
| R6. Grasping different shapes | 4 | 6 | 3 | 1 | 0 | −1 | 0 | −1 | 0 | 0 | 0 | ||
| R7. Collecting sand/sediment samples | 5 | 6 | 3 | 2 | 1 | 2 | 1 | 1 | 1 | 1 | 2 | ||
| R8. Collecting biological samples | 4 | 8 | 3 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | ||
| R9. Firm grasp | 7 | 6 | 7 | 1 | −1 | −1 | 0 | 0 | −1 | −1 | 1 | ||
| R10. Not damaging grasped objects | 6 | 7 | 4 | 0 | −1 | −1 | 0 | 0 | 0 | 0 | 0 | ||
| R11. Collecting stuck or anchored samples | 4 | 8 | 5 | 0 | 0 | −1 | 0 | 0 | 0 | 0 | 0 | ||
| R12. Not damaging working environment | 4 | 8 | 4 | 0 | 0 | 1 | 0 | 0 | 0 | 2 | 0 | ||
| R13. Dexterous grasp | 4 | 5 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| R14. Not getting stuck in the environment | 4 | 4 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| R15. Long battery | 4 | 4 | 7 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| R16. Not introducing pollutants | 4 | 7 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| Post-mission | R17. Simple disassembly | 5 | 2 | 6 | 0 | 0 | 0 | −1 | 0 | 0 | 0 | 0 | |
| R18. Simple ordinary maintenance | 6 | 6 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | ||
| R19. Simple extra-ordinary maintenance | 7 | 4 | 5 | −1 | 0 | 0 | 0 | 0 | 0 | 0 | −1 | ||
| R20. Usable in different application scenarios | 3 | 4 | 2 | 1 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | ||
| 100 | 100 | 100 | Total | 3 | 2 | 1 | 0 | 1 | 1 | 2 | 3 | ||
| Total weighted on Team SILVER2 | 10 | 11 | 9 | 2 | 6 | 4 | 11 | 14 | |||||
| Total weighted on Marine scientist | 27 | 5 | 1 | 5 | 5 | 6 | 17 | 25 | |||||
| Total weighted on Mission operator | 8 | 10 | 7 | −3 | 2 | 2 | 6 | 11 | |||||
| Overall total weighted | 45 | 26 | 17 | 4 | 13 | 12 | 34 | 50 | |||||
| Parameters | Symbol | Value |
|---|---|---|
| Link lengths | ||
| Cable-joint distance | ||
| Fingertip position at closed configuration | ||
| Joint angles at closed configuration | ||
| Cable tension at closed configuration | ||
| Theoretical angular spring stiffness | ||
| Bow-tie joint spring distance | ||
| Theoretical linear spring stiffness |
| Activation Mode | Low Activation | Medium Activation | High Activation |
|---|---|---|---|
| Torque control | T = 4.4 N | T = 5.3 N | T = 6.2 N |
| Position control | α = 44° | α = 88° | α = 132° |
| Low Activation | Medium Activation | High Activation | |
|---|---|---|---|
| Position control | α = 132° | α = 176° | α = 212° |
| Maximum pull-out force | F = 14.7 ± 1.95 N | F = 30.3 ± 4.8 N | F = 37 ± 3.7 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Picardi, G.; De Luca, M.; Chimienti, G.; Cianchetti, M.; Calisti, M. User-Driven Design and Development of an Underwater Soft Gripper for Biological Sampling and Litter Collection. J. Mar. Sci. Eng. 2023, 11, 771. https://doi.org/10.3390/jmse11040771
Picardi G, De Luca M, Chimienti G, Cianchetti M, Calisti M. User-Driven Design and Development of an Underwater Soft Gripper for Biological Sampling and Litter Collection. Journal of Marine Science and Engineering. 2023; 11(4):771. https://doi.org/10.3390/jmse11040771
Chicago/Turabian StylePicardi, Giacomo, Mauro De Luca, Giovanni Chimienti, Matteo Cianchetti, and Marcello Calisti. 2023. "User-Driven Design and Development of an Underwater Soft Gripper for Biological Sampling and Litter Collection" Journal of Marine Science and Engineering 11, no. 4: 771. https://doi.org/10.3390/jmse11040771
APA StylePicardi, G., De Luca, M., Chimienti, G., Cianchetti, M., & Calisti, M. (2023). User-Driven Design and Development of an Underwater Soft Gripper for Biological Sampling and Litter Collection. Journal of Marine Science and Engineering, 11(4), 771. https://doi.org/10.3390/jmse11040771