
Simulating the Impacts of an Applied Dynamic Adaptive Pathways Plan Using an Agent-Based Model: A Tauranga City, New Zealand, Case Study

 , ,
, ,  ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Introduction—Model Components
2.2. Model Forcing
2.3. Dynamic Adaptive Pathways Plan
2.4. Modeler Assumptions
2.5. Limitations
3. Results
3.1. Most Common Pathway in Each Scenario
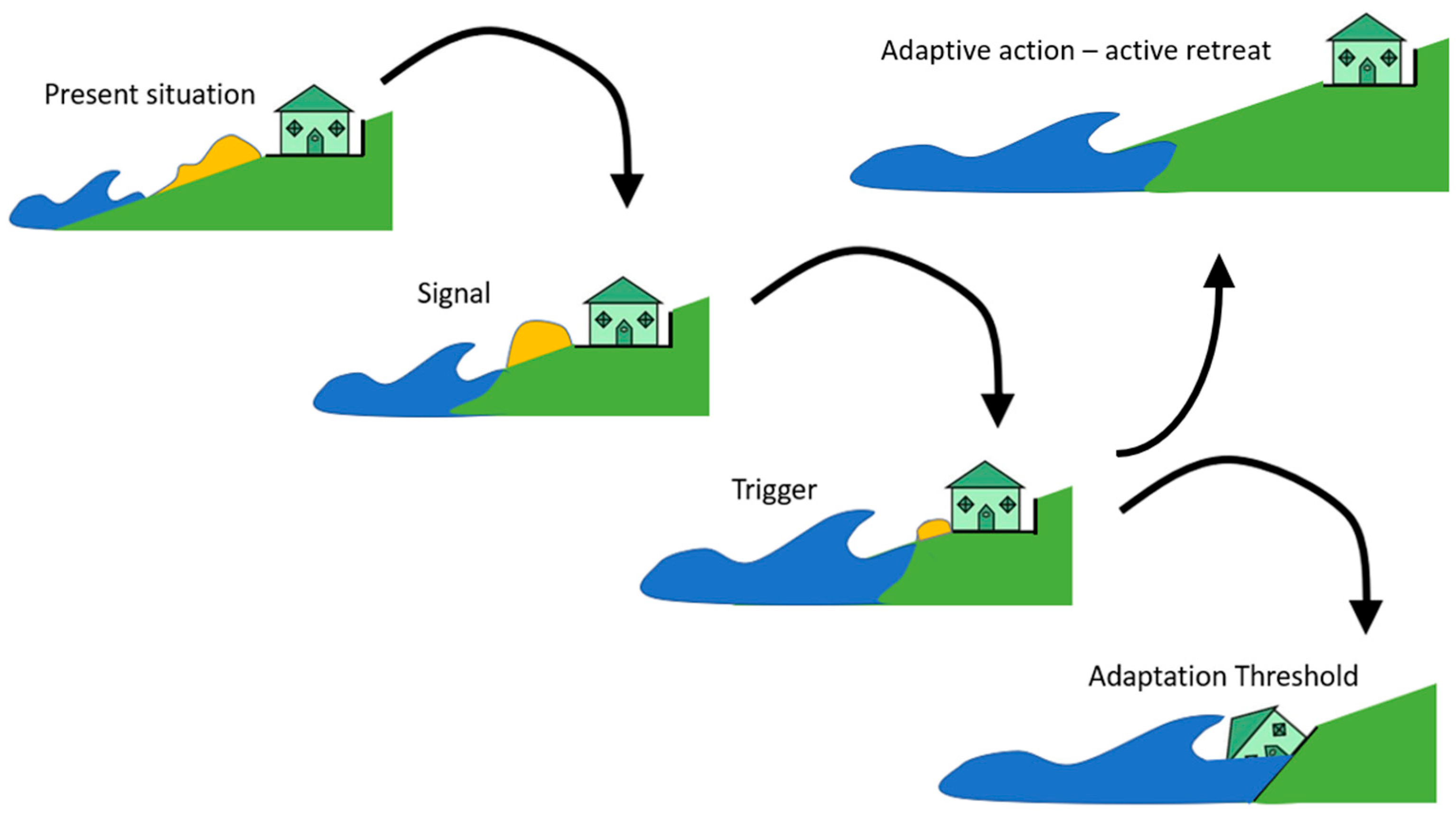
3.2. Timing of Signals, Triggers and Adaptation Thresholds
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Structured Walkthrough

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Action | Individual Scheme | Mixed Scheme | Collective Scheme |
|---|---|---|---|
| Soft protection | 0%: 10% | 1.5%: 5% | 3%: 0% |
| Hard protection | 0%: 20% | 2.5%: 5% | 5%: 0% |
| Infrastructure | 0%: 30% | 3%: 15% | 6%: 0% |
| Improved three waters | 5%: 0% | 5%: 0% | 5%: 0% |
| Prepare to retreat | 0%: 10–30% | 0.5%: 10% | 1%: 0% |
| Managed retreat | 0%: 50% | 10%: 15% | 20%: 0% |
Appendix A.2. Consideration of Submodel Interactions in Practice
- (1)
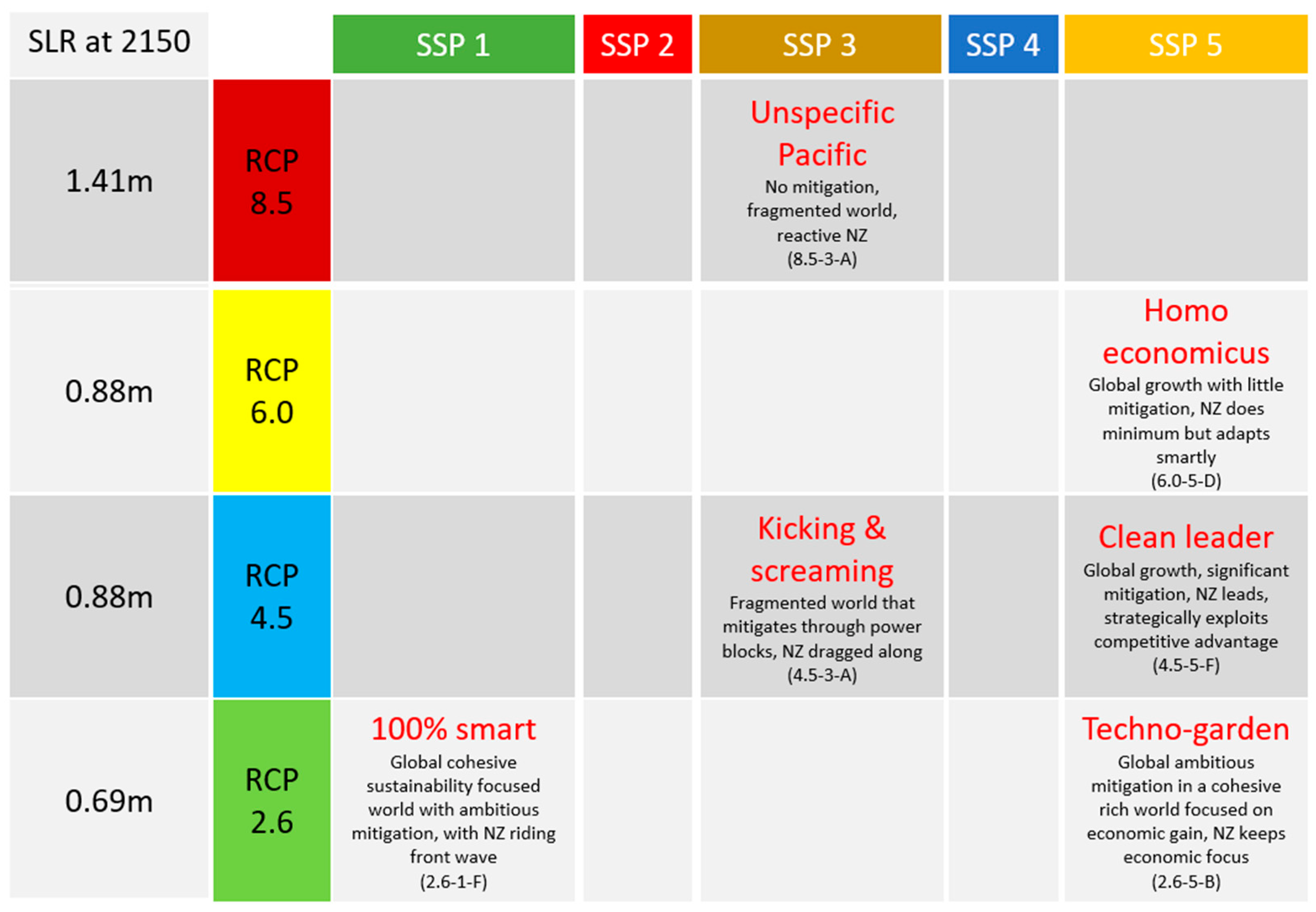
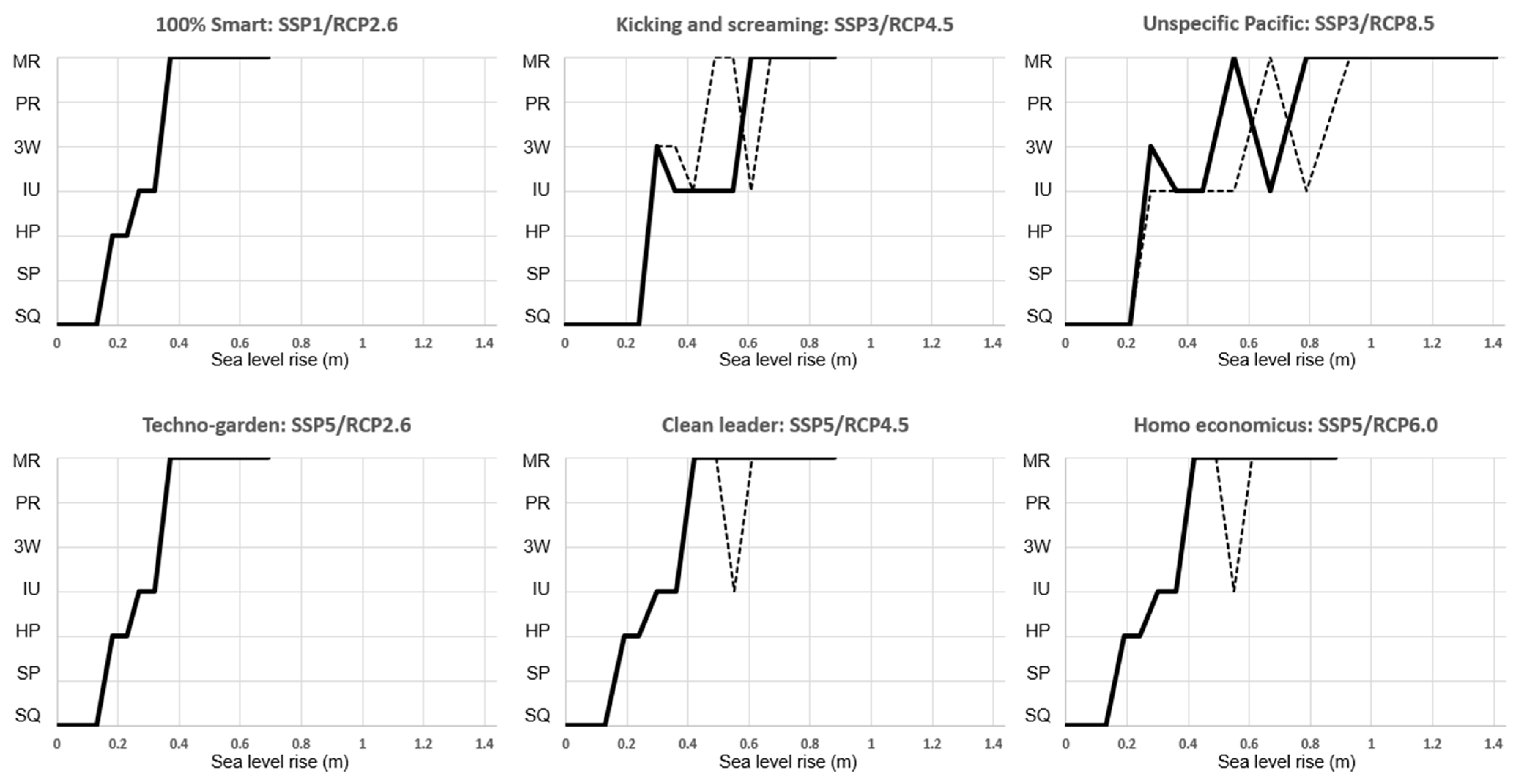
- ‘Kicking and screaming’ and ‘Clean leader’ are both RCP4.5, but have different SSPs (SSP3 and SSP5, respectively). Analysis of the most common pathways in each of these scenarios (Figure 3 of main paper) shows notable differences; as the RCP coding is identical for these two scenarios, these changes can only be driven by SSP.
- (2)
- Comparison of the most common pathways in ‘kicking and screaming’ (RCP4.5 SSP3) and ‘Unspecific Pacific’ (RCP8.5 SSP3) shows differences in both pathways selected and the timing of these pathways; as the SSP coding for these scenarios is identical, it can be inferred that RCP is the driver of these differences.
- (3)
- ‘Homo economicus’ (RCP6.0 SSP5) and ‘Clean leader’ (RCP4.5 SSP5) show identical pathways, as RCP6.0 and RCP4.5 are coded very similarly, with only minor changes in rainfall/runoff patterns between the two RCPs; as the pathways between the two scenarios are identical, rainfall/runoff can be ruled out as a driver of pathway changes, and the rate of SLR and associated coastal inundation confirmed as the main drivers of adaptation pathway changes in these scenarios.
Appendix B. Methodological Overview
| 1 | We define desirability in the context of development/intensification on any given spatial area unit in the model with respect to sea levels. It is based on land being above high tide level, the value and age of property in the location, and the record of hazard impacts on the location. Any spatial area unit with a desirability value above the minimum threshold can have a house or business developed on it, if a ‘person’ agent at that location chooses to do so. |
| 2 | Freshwater, wastewater and stormwater provision. |
| 3 | House loans in New Zealand require insurance to be available and increasingly insurance companies are seeing sea-level rise as a foreseeable and therefore an uninsurable cause of damage. |
References
- Hinkel, J.; Lincke, D.; Vafeidis, A.T.; Perrette, M.; Nicholls, R.J.; Tol, R.S.J.; Marzeion, B.; Fettweis, X.; Ionescu, C.; Levermann, A. Coastal flood damage and adaptation costs under 21st century sea level rise. Proc. Natl. Acad. Sci. USA 2014, 111, 3292–3297. [Google Scholar] [CrossRef] [PubMed]
- Nicholls, R.J. Planning for the impacts of sea level rise. Oceanography 2011, 24, 144–157. [Google Scholar] [CrossRef]
- Nicholls, R.J.; Hanson, S.; Herweijer, C.; Patmore, N.; Hallegatte, S.; Corfee-Mordlot, J.; Chateau, J.; Muir-Wood, R. Ranking Port Cities with High Exposure and Vulnerability to Climate Extremes: Exposure Estimates; Environment Working Paper No. 1; Organization for Economic Co-Operation and Development: Paris, France, 2008.
- Rouse, H.L.; Bell, R.G.; Lundquist, C.J.; Blackett, P.E.; Hicks, D.M.; King, D.N. Coastal adaptation to climate change in Aotearoa-New Zealand. N. Z. J. Mar. Freshw. Res. 2016, 51, 183–222. [Google Scholar] [CrossRef]
- Iorns, C.; Watts, J. Adaptation to Sea Level Rise: Local Government Liability Issues; Deep South National Science Challenge: Wellington, New Zealand, 2019; 234p. [Google Scholar]
- Boston, J.; Lawrence, J. Funding Climate Change Adaptation, the case for a new policy framework. Policy Q. 2018, 14, 40–49. [Google Scholar] [CrossRef]
- Storey, B.; Noy, I. Insuring property under climate change. Policy Q. 2017, 13, 68–74. [Google Scholar] [CrossRef]
- Lawrence, J.; Bell, R.; Blackett, P.; Stephens, S.; Allan, S. National guidance for adapting to hazards and sea-level rise: Anticipating change, when and how to change pathway. Environ. Sci. Policy 2018, 82, 100–107. [Google Scholar] [CrossRef]
- Stephens, S. The Effect of Sea-Level Rise on the Frequency of Extreme Sea Levels in New Zealand; Prepared by NIWA for the Parliamentary Commissioner for the Environment; Parliamentary Commission for the Environment: Wellington, New Zealand, 2015; 48p.
- Marchau, V.A.J.W.; Walker, W.E.; Bloemen, P.J.T.M.; Popper, S.W. Introduction. In Decision Making under Deep Uncertainty. From Theory to Practice; Marchau, V.A.W.J., Walker, W.E., Bloemen, P.J.T.M., Popper, S.W., Eds.; Springer Open: Cham, Switzerland, 2019; pp. 1–21. [Google Scholar]
- Stephens, S.A.; Bell, R.G.; Lawrence, J. Applying principles of uncertainty within coastal hazard assessments to better support coastal adaptation. J. Mar. Sci. Eng. 2017, 5, 40. [Google Scholar] [CrossRef]
- Sunstein, C.R. Cost-benefit analysis and the environment. Ethics 2005, 115, 351–385. [Google Scholar] [CrossRef]
- Konidari, P.; Mavrakis, D. A multi-criteria evaluation method for climate change mitigation policy instruments. Energy Policy 2021, 50, 229–241. [Google Scholar] [CrossRef]
- Stroombergen, A.; Lawrence, J. A novel illustration of real options analysis to address the problem of probabilities under deep uncertainty and changing climate risk. Clim. Risk Manag. 2022, 38, 100458. [Google Scholar] [CrossRef]
- Lempert, R.J. Chapter 2: Robust Decision-Making. In Decisionmaking under Deep Uncertainty: From Theory to Practice; Marchau, V., Walker, W., Bloeman, P., Popper, S.W., Eds.; Springer: Cham, Switzerland, 2019; pp. 23–52. [Google Scholar]
- Haasnoot, M.; Warren, A.; Kwakkel, J.H. Dynamic Adaptive Policy Pathways (DAPP). In Decision-Making under Deep Uncertainty: From Theory to Practice; Marchau, V.A.W.J., Walker, W.E., Bloemen, P.J.T.M., Popper, S.W., Eds.; Springer: Cham, Switzerland, 2019; pp. 71–92. [Google Scholar]
- Walker, W.E.; Haasnoot, M.; Kwakkel, J.H. Adapt or perish: A review of planning approaches for adaptation under deep uncertainty. Sustainability 2013, 5, 955–979. [Google Scholar] [CrossRef]
- Pörtner, H.-O.; Roberts, D.C.; Poloczanska, E.S.; Mintenbeck, K.; Tignor, M.; Alegría, A.; Craig, M.; Langsdorf, S.; Löschke, S.; Möller, V.; et al. (Eds.) Summary for Policymakers. In Climate Change 2022: Impacts, Adaptation, and Vulnerability; Contribution of Working Group II to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change 2022a; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2022; pp. 3–33. [Google Scholar]
- IPCC. Summary for Policymakers. In Climate Change 2014: Mitigation of Climate Change; Contribution of Working Group III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Edenhofer, O., Pichs-Madruga, R., Sokona, Y., Farahani, E., Kadner, S., Seyboth, K., Adler, A., Baum, I., Brunner, S., Eickemeier, P., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2014. [Google Scholar]
- Riahi, K.; van Vuuren, D.P.; Kriegler, E.; Edmonds, J.; O’Neill, B.C.; Fujimori, S.; Bauer, N.; Calvin, K.; Dellink, R.; Fricko, O.; et al. The Shared Socioeconomic Pathways and their energy, land use and greenhouse gas emissions implications: An overview. Glob. Environ. Chang. 2017, 42, 153–168. [Google Scholar] [CrossRef]
- Levermann, A.; Clark, P.U.; Marzeion, B.; Milne, G.A.; Pollard, D.; Radic, V.; Robinson, A. The multimillennial sea-level commitment of global warming. Proc. Natl. Acad. Sci. USA 2013, 110, 13745–13750. [Google Scholar] [CrossRef] [PubMed]
- Cooley, S.; Schoeman, D.; Bopp, L.; Boyd, P.; Donner, S.; Ghebrehiwet, D.Y.; Ito, S.-I.; Kiessling, W.; Martinetto, P.; Ojea, E.; et al. Chapter 3: Oceans and Coastal Ecosystems and Their Services. In Climate Change 2022: Impacts, Adaptation and Vulnerability; Working Group II Contribution to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2022; pp. 295–408. [Google Scholar]
- Ministry for the Environment. Preparing for Coastal Change; A Summary of Coastal Hazards and Climate Change Guidance for Local Government; Bell, R., Lawrence, J., Allan, S., Blackett, P., Stephens, S., Eds.; Ministry for the Environment: Wellington, New Zealand, 2017; Publication ME 1335.
- Haasnoot, M.; van’t Kluster, S.; van Alphen, J. Designing a monitoring system to detect signals to adapt to uncertain climate change. Glob. Environ. Chang. 2018, 52, 273–285. [Google Scholar] [CrossRef]
- Lawrence, J.; Bell, R.; Blackett, P.; Stephens, S.; Collins, D.; Craddock-Henry, N.; Hardcastle, M. Supporting Decision Making through Adaptive Tools in a Changing Climate, Practice Guidance on Signals and Triggers; The Deep South National Science Challenge; Victoria University of Wellington: Wellington, New Zealand, 2020. [Google Scholar]
- Haasnoot, M.; Kwakkel, J.H.; Walker, W.E.; ter Maat, J. Dynamic adaptive policy pathways: A method for crafting robust decisions for a deeply uncertain world. Glob. Environ. Chang. 2013, 23, 485–498. [Google Scholar] [CrossRef]
- Islam, M.M.; Rahman, M.A.; Khan, M.S.; Mondal, G.; Khan, M.I. Transformational adaptation to climatic hazards: Insights from mangroves-based coastal fisheries dependent communities of Bangladesh. Mar. Policy 2021, 128, 104475. [Google Scholar] [CrossRef]
- Zagaria, C.; Schulp, C.J.E.; Zavalloni, M.; Viaggi, D.; Verburg, P.H. Modelling transformational adaptation to climate change among crop farming systems in Romagna, Italy. Agric. Syst. 2021, 188, 103024. [Google Scholar] [CrossRef]
- Kates, R.W.; Travis, W.R.; Wilbanks, T.J. Transformational adaptation when incremental adaptations to climate change are insufficient. Proc. Natl. Acad. Sci. USA 2012, 109, 7156–7161. [Google Scholar] [CrossRef]
- Kool, R.; Lawrence, J.; Drews, M.; Bell, R. Preparing for Sea-Level Rise through Adaptive Managed Retreat of a New Zealand Stormwater and Wastewater Network. Infrastructures 2020, 5, 92. [Google Scholar] [CrossRef]
- Haasnoot, M.; Lawrence, J.; Magnan, A.K. Pathways to coastal retreat. Science 2021, 372, 1287–1290. [Google Scholar] [CrossRef]
- Walker, W.E.; Marchau, V.A.W.J.; Kwakkel, J.H. Dynamic Adaptive Planning. In Decision Making under Deep Uncertainty; Marchau, V.A.W.J., Walker, W.E., Bloemen, P.J.T.M., Popper, S.W., Eds.; Springer: Cham, Switzerland, 2019; pp. 53–69. [Google Scholar]
- Werners, S.; Pfenniger, S.; van Slobbe, E.; Haasnoot, M.; Kwakkel, J.H.; Swart, R.J. Thresholds, tipping and turning points for sustainability under climate change. Curr. Opin. Environ. Sustain. 2013, 5, 334–340. [Google Scholar] [CrossRef]
- Stephens, S.A.; Bell, R.G.; Lawrence, J. Developing signals to trigger adaptation to sea-level rise. Environ. Res. Lett. 2018, 13, 104004. [Google Scholar] [CrossRef]
- Dafermos, Y.; Nikolaidi, M.; Galanis, G. Climate Change, Financial Stability and Monetary Policy. Ecol. Econ. 2018, 152, 219–234. [Google Scholar] [CrossRef]
- Climate Change Adaptation Technical Working Group. Adapting to Climate Change in New Zealand; Ministry for the Environment: Wellington, New Zealand, 2017; ISBN 978-1-98-852527-3.
- Gasper, R.; Blohm, A.; Ruth, M. Social and economic impacts of climate change on the urban environment. Curr. Opin. Environ. Sustain. 2011, 3, 150–157. [Google Scholar] [CrossRef]
- Tol, R. The Economic Impact of Climate Change; ESRI Working Paper, No. 255; The Economic and Social Research Institute (ESRI): Dublin, Ireland, 2008. [Google Scholar]
- Kwakkel, J.H.; Haasnoot, M.; Walker, W.E. Comparing Robust Decision-Making and Dynamic Adaptive Policy Pathways for model-based decision support under deep uncertainty. Environ. Model. Softw. 2016, 86, 168–183. [Google Scholar] [CrossRef]
- Kwakkel, J.H.; Haasnoot, M.; Walker, W.E. Developing dynamic adaptive policy pathways: A computer-assisted approach for developing adaptive strategies for a deeply uncertain world. Clim. Chang. 2015, 132, 373–386. [Google Scholar] [CrossRef]
- Allison, A.E.F. Developing a Methodology for Transdisciplinary Modelling of Complex Human-Environment Systems. Ph.D. Thesis, The University of Auckland, Auckland, New Zealand, 2020; 242p. unpublished. [Google Scholar]
- O’Sullivan, D.; Millington, J.; Perry, G.; Wainwright, J. Agent-Based Models—Because They’re Worth It? In Agent-Based Models of Geographical Systems; Heppenstall, A.J., Crooks, A., See, L.M., Batty, M., Eds.; Springer: Dordrecht, The Netherlands, 2012; 138p. [Google Scholar]
- Allison, A.E.F.; Dickson, M.E.; Fisher, K.T.; Thrush, S.F. Communicating drivers of environmental change through transdisciplinary human-environment modelling. Earth’s Future 2021, 9, e2020EF001918. [Google Scholar] [CrossRef]
- McNamara, D.E.; Keeler, A. A coupled physical and economic model of the response of coastal real estate to climate risk. Nat. Clim. Chang. 2013, 3, 559–562. [Google Scholar] [CrossRef]
- Luo, M.; Opaluch, J.J.; Anderson, J.L.; Schnier, K. Managing the Intentional Introduction of Nonnative Species. In Oysters: Physiology, Ecological Distribution and Mortality; Qin, J.G., Ed.; Flinders University: Adelaide, Australia, 2012; pp. 101–145. [Google Scholar]
- Lawrence, J.; Bell, R.; Stroombergen, A. A Hybrid Process to Address Uncertainty and Changing Climate Risk in Coastal Areas Using Dynamic Adaptive Pathways Planning, Multi-Criteria Decision Analysis & Real Options Analysis: A New Zealand Application. Sustainability 2019, 11, 406. [Google Scholar] [CrossRef]
- Deep South National Science Challenge, Sea Level Rise and River Flooding: Flood Risk under Climate Change. 2019. Available online: https://deepsouthchallenge.co.nz/sea-level-rise-and-river-flooding-flood-risk-under-climate-change/ (accessed on 16 November 2022).
- Aerts, J.C.J.H. Integrating agent-based approaches with flood risk models: A review and perspective. Water Secur. 2020, 2020, 100076. [Google Scholar] [CrossRef]
- Haer, T.; Botzen, W.J.W.; Aerts, J.C.J.H. Advancing disaster policies by integrating dynamic adaptive behaviour in risk assessments using an agent-based modelling approach. Environ. Res. Lett. 2019, 14, 044022. [Google Scholar] [CrossRef]
- Allison, A.E.F. Multi-Hazard Coastal Agent-Based Model (MHCABM) (version 1.0.0), CoMSES, Published 5 August 2021. Available online: https://www.comses.net/codebases/5d9768df-97ae-4994-8517-6af877d8b9b5/releases/1.0.0/ (accessed on 25 November 2022).
- Atkinson, J.; Salmond, C.; Crampton, P. NZDep2013 Index of Deprivation; University of Otago: Dunedin, New Zealand, 2014. [Google Scholar]
- Frame, B.; Lawrence, J.; Ausseil, A.-G.; Reisinger, A.; Daigneault, A. Adapted global shared socio-economic pathways for national and local scenarios. Clim. Risk Manag. 2018, 21, 39–51. [Google Scholar] [CrossRef]
- Allison, A.E.F.; Stephens, S.; Blackett, P.; Jozaei, J.; Lawrence, J.; Dickson, M.; Matthews, Y. Who Pays for Climate Change Adaptation? Investigating RCP, SSP and Cost Apportionment Impacts Using a Simple Multi-Hazard Risk Interaction Model. In Proceedings of the Australasian Coasts & Ports Conference 2021, Christchurch, New Zealand, 30 November–3 December 2021; pp. 76–82. [Google Scholar]
- Ministry for the Environment. Interim Guidance on the Use of New Sea-Level Rise Projections; Ministry for the Environment: Wellington, New Zealand, 2022.
- Lawrence, J.; Boston, J.; Bell, R.; Olufson, S.; Kool, R.; Hardcastle, M.; Stroombergen, A. Implementing pre-emptive managed retreat: Constraints and novel insights. Curr. Clim. Chang. Rep. 2020, 6, 66–80. [Google Scholar] [CrossRef]
- Ministry of Business. Innovation and Employment 2004 Building Act. New Zealand Government Public Act 2004. No. 72. Available online: http://legislation.govt.nz/act/public/2004/0072/latest/DLM306036.html (accessed on 25 November 2022).
- Ministry for the Environment. Resource Management Act; Ministry for the Environment: Wellington, New Zealand, 1991.
- NZ Searise. Local Vertical Land Movement Projections. 2022. Available online: https://www.searise.nz (accessed on 26 May 2022).
- Lawrence, J.; Allan, S.; Clarke, L. Inadequacy Revealed and the Transition to Adaptation as Risk Management in New Zealand. Front. Clim. 2021, 3, 734726. [Google Scholar] [CrossRef]
- PCE. Preparing New Zealand for Rising Seas: Certainty and Uncertainty. Parliamentary Commissioner for the Environment. 2015. Available online: https://www.pce.parliament.nz/media/1390/preparing-nz-for-rising-seas-web-small.pdf (accessed on 25 November 2022).
- Lawrence, J.; Mackey, B.; Chiew, F.; Costello, M.J.; Hennessy, K.; Lansbury, N.; Nidumolu, U.B.; Pecl, G.; Rickards, L.; Tapper, N.; et al. Australasia. In Climate Change 2022: Impacts, Adaptation, and Vulnerability; Contribution of Working Group II to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Pörtner, H.-O., Roberts, D.C., Tignor, M., Poloczanska, E.S., Mintenbeck, K., Alegría, A., Craig, M., Langsdorf, S., Löschke, S., Möller, V., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2022. [Google Scholar]
- Ministry for the Environment and Statistics New Zealand. Our Marine Environment 2019. Available online: https://environment.govt.nz/assets/publications/Files/our-marine-environment-2019.pdf (accessed on 29 January 2023).
- Storey, B.; Owen, S.; Zammit, C.; Noy, I. Insurance Retreat in Residential Properties from Future Sea Level Rise in Aotearoa New Zealand. CESifo Working Paper No. 10017. 2022. Available online: https://ssrn.com/abstract=4257216 (accessed on 10 January 2023).
- Ministry for the Environment. Coastal Hazards and Climate Change: Guidance for Local Government; Bell, R., Lawrence, J., Allan, S., Blackett, P., Stephens, S., Eds.; Ministry for the Environment Publication: Wellington, New Zealand, 2017; ME 1341.
- Houssou, N.L.J.; Cordero, J.D.; Bouadjio-Boulic, A.; Morin, L.; Maestripieri, N.; Ferrant, S.; Belem, M.; Peláez, J.I.; Saenz, M.; Lerigoleur, E.; et al. Synchonising histories of exposure and demography: The construction of an agent-based model of the Ecuadorian Amazon colonization and exposure to oil pollution hazards. J. Artif. Soc. Soc. Simul. 2019, 22, 1. [Google Scholar] [CrossRef]
- Daysh, S. Clifton to Tangoio Coastal Hazard Strategy, A Practical Case Study of Community Based Decision-Making in Hawkes Bay. In Proceedings of the RMLA Conference Presentation, Wellington, New Zealand, 26 November 2018. [Google Scholar]
- Jacobson, M. NZCPS Coastal Hazard Policies. Plan. Q. 2005, 24, 6–8. [Google Scholar]
- Lempert, R.J. Robust Decision-Making (RDM). In Decision-Making under Deep Uncertainty; Marchau, V.A.J.W., Walker, W.E., Bloemen, P.J., Popper, S.W., Eds.; Springer: Cham, Switzerland, 2019; pp. 23–51. [Google Scholar]
- Li, Y. Deep reinforcement learning: An overview. arXiv 2017, arXiv:1810.06339. [Google Scholar] [CrossRef]
- Sargent, R.G. Verification and validation of simulation models. J. Simul. 2013, 7, 12–24. [Google Scholar] [CrossRef]
- Grimm, V.; Berger, U.; Bastiansen, F.; Eliassen, S.; Ginot, V.; Giske, J.; GossCustard, J.; Grand, T.; Heinz, S.K.; Huse, G.; et al. A standard protocol for describing individual-based and agent-based models. Ecol. Model. 2006, 198, 115–126. [Google Scholar] [CrossRef]
- Grimm, V.; Berger, U.; DeAngelis, D.L.; Polhill, J.G.; Giske, J.; Railsback, S.F. The ODD protocol: A review and first update. Ecol. Model. 2010, 221, 2760–2768. [Google Scholar] [CrossRef]
- Statistics New Zealand. New Zealand Census. 2013. Available online: https://stats.govt.nz/census/previous-censuses/2013-census/ (accessed on 18 October 2022).
- Reisinger, A.; Kitching, R.L.; Chiew, F.; Hughes, L.; Newton, P.C.D.; Schuster, S.S.; Tait, A.; Whetton, P. Australasia. In Climate Change 2014: Impacts, Adaptation, and Vulnerability; Part B: Regional Aspects; Contribution of Working Group II to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Barros, V.R., Field, C.B., Dokken, D.J., Mastrandrea, M.D., Mach, K.J., Bilir, T.E., Chatterjee, M., Ebi, K.L., Estrada, Y.O., Genova, R.C., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2014; pp. 1371–1438. [Google Scholar]
- Carey-Smith, T.; Dean, S.; Vial, J.; Thompson, C. Changes in precipitation extremes for New Zealand: Climate model predictions. Weather Clim. 2010, 30, 23–48. [Google Scholar] [CrossRef]
- Reeve, G.; Stephens, S.; Wadhwa, S. Tauranga Harbour Inundation Modelling 2019; NIWA Climate Report: 2018269HN; NIWA: Hamilton, New Zealand, 2019. [Google Scholar]
- Bitan, M.; Zviely, D. Sand beach nourishment: Experience from the Mediterranean Coast of Israel. J. Mar. Sci. Eng. 2020, 8, 273. [Google Scholar] [CrossRef]
- Statistics New Zealand. Trending Topics—Housing. 2017. Available online: https://www.stats.govt.nz/assets/Reports/Trending-topics-Housing/trending-topics-housing.pdf (accessed on 18 October 2022).
- Faber, J.H.; Marshall, S.; van den Brink, P.J.; Maltby, L. Priorities and opportunities in the application of the ecosystem services concept in risk assessment for chemicals in the environment. Sci. Total Environ. 2019, 651, 1067–1077. [Google Scholar] [CrossRef]
- Baier, R.R.; Jutkowicz, E.; Mitchell, S.L.; McCreedy, E.; Mor, V. Readiness assessment for pragmatic trials (RAPT): A model to assess the readiness of an intervention for testing in a pragmatic trial. Med. Res. Methodol. 2019, 19, 156. [Google Scholar] [CrossRef] [PubMed]
- Tariq, A.; Lempert, R.J.; Riverson, J.; Schwartz, M.; Berg, N. A climate stress test of Los Angeles’ water quality plans. Clim. Chang. 2017, 144, 625–639. [Google Scholar] [CrossRef]
- van Vuuren, D.P.; Edmonds, J.; Kainuma, M.; Riahi, K.; Thompson, A.; Hibbard, K.; Hurtt, G.C.; Kram, T.; Krey, V.; Lamarque, J.-F.; et al. The representative concentration pathways: An overview. Clim. Chang. 2011, 109, 5–31. [Google Scholar] [CrossRef]
- Schlüter, M.; McAllister, R.R.J.; Alinghaus, R.; Bunnefeld, N.; Eisenack, K.; Hölker, F.; Milner-Gulland, E.J.; Müller, B. New Horizons for Managing the Environment: A Review of Coupled Social-Ecological Systems Modeling. Nat. Resour. Model. 2012, 25, 219–272. [Google Scholar] [CrossRef]
- Kelly, R.A.; Jakeman, A.J.; Barreteau, O.; Bursuk, M.E.; Elsawah, S.; Hamilton, S.H.; Hendriksen, H.J.; Kuikka, S.; Maier, H.R.; Rizzoli, A.E.; et al. Selecting among five common modelling approaches for integrated environmental assessment and management. Environ. Model. Softw. 2013, 47, 159–181. [Google Scholar] [CrossRef]
- Bousquet, F.; Le Page, C. Multi-agent simulations and ecosystem management: A review. Ecol. Model. 2004, 176, 313–332. [Google Scholar] [CrossRef]
- Lempert, R.J. A new decision sciences for complex systems. Proc. Natl. Acad. Sci. USA 2002, 99 (Suppl. S3), 7309–7313. [Google Scholar] [CrossRef]
- Seidl, R. A functional-dynamic reflection on participatory processes in modeling projects. Ambio 2015, 44, 750–765. [Google Scholar] [CrossRef] [PubMed]
- Simon, C.; Etienne, M. A companion modelling approach applied to forest management planning. Environ. Model. Softw. 2010, 25, 1371–1384. [Google Scholar] [CrossRef]
- Voinov, A.; Bousquet, F. Modelling with stakeholders. Environ. Model. Softw. 2010, 25, 1268–1281. [Google Scholar] [CrossRef]
- Allison, A.E.F.; Dickson, M.E.; Fisher, K.T.; Thrush, S.F. Dilemmas of modelling and decision-making in environmental research. Environ. Model. Softw. 2018, 99, 147–155. [Google Scholar] [CrossRef]
- Heijungs, R. On the number of Monte Carlo runs in comparative probabilistic LCA. Int. J. Life Cycle Assess. 2020, 25, 394–402. [Google Scholar] [CrossRef]
- Johnston, J.M.; McGarvey, D.J.; Barber, M.C.; Laniak, G.; Babendreier, J.; Parmar, R.; Wolfe, K.; Kraemer, S.R.; Cyterski, M.; Knightes, C.; et al. An integrated modelling framework for performing environmental assessments: Application to ecosystem services in the Albemarle-Pamlico basins (NC and VA, USA). Ecol. Model. 2011, 222, 2471–2484. [Google Scholar] [CrossRef]
- Blackett, P.; Davies, K.; Davies, B.; Holland, P.; Craddock-Henry, N. “Adaptive Futures” An Interactive Serious Game for Decision-Making and Coastal Hazards; NIWA Client Report 2019328HN; NIWA: Hamilton, New Zealand, 2019. [Google Scholar]
- Moallemi, E.A.; Kwakkel, J.; de Haan, F.J.; Bryan, B.A. Exploratory modelling for analyzing coupled human-natural systems under uncertainty. Glob. Environ. Chang. 2020, 65, 102186. [Google Scholar] [CrossRef]
- White, J.W.; Rassweiler, A.; Samhouri, J.F.; Stier, A.C.; White, C. Ecologists should not use statistical significance tests to interpret simulation model results. Oikos 2013, 123, 385–388. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2017; Available online: https://www.R-project.org/ (accessed on 25 November 2022).
- Pliknyas, D.; Laužikas, R.; Sakalauskas, L.; Miliauskas, A.; Dulskis, V. Agent-Based Simulation of Cultural Events on Social Capital Dynamics. In Intelligent Systems and Applications; Advances in Intelligent Systems and Computing; Bi, Y., Bhatia, R., Kapoor, S., Eds.; Springer: Cham, Switzerland, 2020; Volume 1037. [Google Scholar]
- Suárez-Muñoz, M.; Bonet-García, F.; Hódar, J.; Herrero, J.; Tanase, M.; Torres-Muros, L. INSTAR: An agent-based model that integrates existing knowledge to simulate the population dynamics of a forest pest. Ecol. Model. 2019, 411, 108764. [Google Scholar] [CrossRef]
- Blackett, P.; FitzHerbert, S.; Luttrell, J.; Hopmans, T.; Lawrence, H.; Colliar, J. Marae-opoly: Supporting localised Māori climate adaptation decisions with serious games in Aotearoa New Zealand. Sustain. Sci. 2021, 17, 415–431. [Google Scholar] [CrossRef]
- Haasnoot, M.; Schellekens, J.; Middlekoop, H.; Kwadijk, J.C.J. Transient scenarios for robust climate change adaptation illustrated for water management in the Netherlands. Environ. Res. Lett. 2015, 10, 105008. [Google Scholar] [CrossRef]







| Indicator | Category | Signal Value | Trigger Value | Adaptation Threshold Value | Actions |
|---|---|---|---|---|---|
| Insurance premium or deductibles increase | Financial | Mean annual insurance cost is 2.05% of net worth | Mean annual insurance cost is 2.2% of net worth | Mean annual insurance cost is 5% of net worth | SP 60%, IU: 40% |
| Maintenance costs increase | Financial | Mean annual building maintenance cost is 2.1% of net worth | Mean annual building maintenance cost is 2.23% of net worth | Mean annual building maintenance cost is 5% of net worth | IU: 60%, PR: 40% |
| Aesthetic degradation | Social | A seawall has been constructed | Five or more seawalls have been constructed | 10 or more seawalls have been constructed | IU: 60%, PR: 40% |
| Total hazardous area | Psychological | 5 or more patches contain stressed or uninsurable houses | 10 or more patches contain stressed or uninsurable houses | 20 or more patches contain stressed or uninsurable houses | 3W: 60%, IU: 20%, HP: 20% |
| Decline in property desirability | Financial | Desirability has fallen to 97.5% of its original value | Desirability has fallen to 95% of its original value | Desirability has fallen to 90% of its original value | HP: 60%, IU: 40% |
| Number of flood events | Hazard | 5% of occupied patches have been impacted by one or more events since a 10-year event-free period | 10% of occupied patches have been impacted by one or more events since a 10-year event-free period | 20% of occupied patches have been impacted by one or more events since a 10-year event-free period | IU: 60%, PR: 40% |
| Three waters vulnerability | Hazard | RSLR reaches 10 cm | RSLR reaches 20 cm | RSLR reaches 30 cm | 3W: 60%, IU: 40% |
| Preparation for active retreat | Policy | N/A | Selection of action PR | N/A | AR: 100% |
| Multiple active triggers | Policy | N/A | Two or more triggers active simultaneously | N/A | HP: 33% IU: 33% PR: 33% |
| Abbreviation | Action | Adaptation Undertaken | Lead Time |
|---|---|---|---|
| SQ | Status Quo | Raise floors and land elevation | None |
| SP | Soft Protection | Beach nourishment | 2 years |
| HP | Hard Protection | Build seawall | 4 years |
| IU | Infrastructure upgrades | Raise floors and land elevation, pumped three waters system, prevention of new builds in hazard zones via planning rule | 7 years |
| 3W | Improved Three Waters | Pumped three waters system | 5 years |
| PR | Preparation for active Retreat | Consultation and planning | None |
| AR | Active Retreat | Active Retreat | 20 years |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allison, A.; Stephens, S.; Blackett, P.; Lawrence, J.; Dickson, M.E.; Matthews, Y. Simulating the Impacts of an Applied Dynamic Adaptive Pathways Plan Using an Agent-Based Model: A Tauranga City, New Zealand, Case Study. J. Mar. Sci. Eng. 2023, 11, 343. https://doi.org/10.3390/jmse11020343
Allison A, Stephens S, Blackett P, Lawrence J, Dickson ME, Matthews Y. Simulating the Impacts of an Applied Dynamic Adaptive Pathways Plan Using an Agent-Based Model: A Tauranga City, New Zealand, Case Study. Journal of Marine Science and Engineering. 2023; 11(2):343. https://doi.org/10.3390/jmse11020343
Chicago/Turabian StyleAllison, Andrew, Scott Stephens, Paula Blackett, Judy Lawrence, Mark Edward Dickson, and Yvonne Matthews. 2023. "Simulating the Impacts of an Applied Dynamic Adaptive Pathways Plan Using an Agent-Based Model: A Tauranga City, New Zealand, Case Study" Journal of Marine Science and Engineering 11, no. 2: 343. https://doi.org/10.3390/jmse11020343
APA StyleAllison, A., Stephens, S., Blackett, P., Lawrence, J., Dickson, M. E., & Matthews, Y. (2023). Simulating the Impacts of an Applied Dynamic Adaptive Pathways Plan Using an Agent-Based Model: A Tauranga City, New Zealand, Case Study. Journal of Marine Science and Engineering, 11(2), 343. https://doi.org/10.3390/jmse11020343