
Neural Network-Based Adaptive Sigmoid Circular Path-Following Control for Underactuated Unmanned Surface Vessels under Ocean Disturbances


Abstract
:1. Introduction
- A novel look-ahead angle guidance architecture is established to facilitate the circular path guidance. Compared with the existing curve path guidance approach, the Serret-Frenet coordinate transformation is not required by the proposed method, such that the proposed method enjoys a simple and intuitive structure as a traditional straight-line guidance approach in practical engineering.
- A novel sigmoid compensation is introduced to the guidance law. Using this design, the guidance angle can be adaptively tunned according to the scale and the change rate of cross-tracking error, which enables guidance performance under external disturbances and parameter adaptability under different surge speeds.
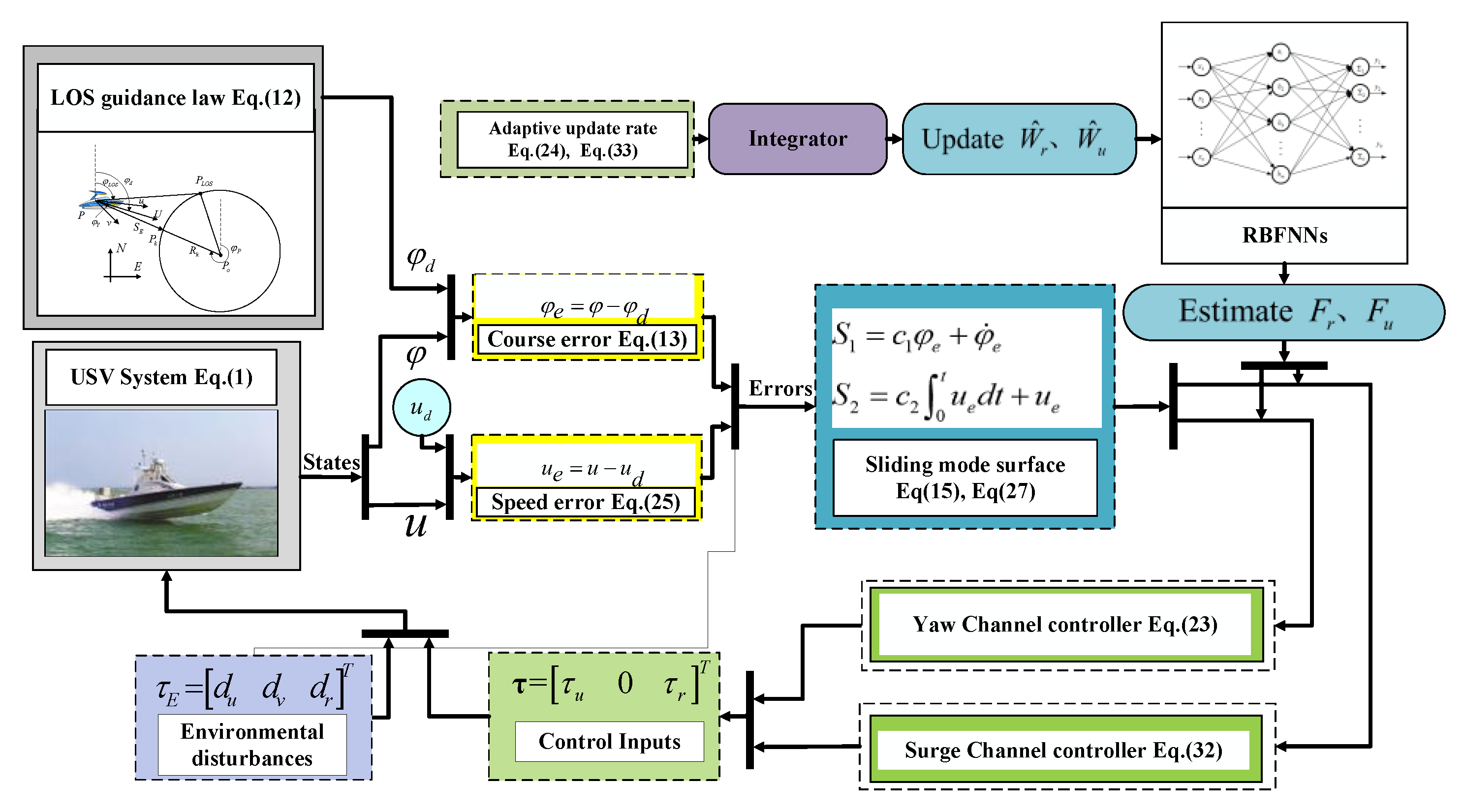
- A neural network-based adaptive scheme is developed to estimate unknown unmodeled dynamics. In the design, an adaptive learning law is developed to update the weight matrix of the neural network, and the adaptive control is combined to compensate for the deficiencies of the sliding mode change structure control so that the system can weaken the vibrations while maintaining the robustness under internal perturbations and external disturbances.
2. Preliminary Findings
2.1. Underactuated USV Model
2.2. Function Approximation
2.3. Control Objective
- (1)
- LOS guidance: Under the proposed LOS guidance law, the USV can track the circular path, and the transversal deviation is stable within the bounded tracking error.
- (2)
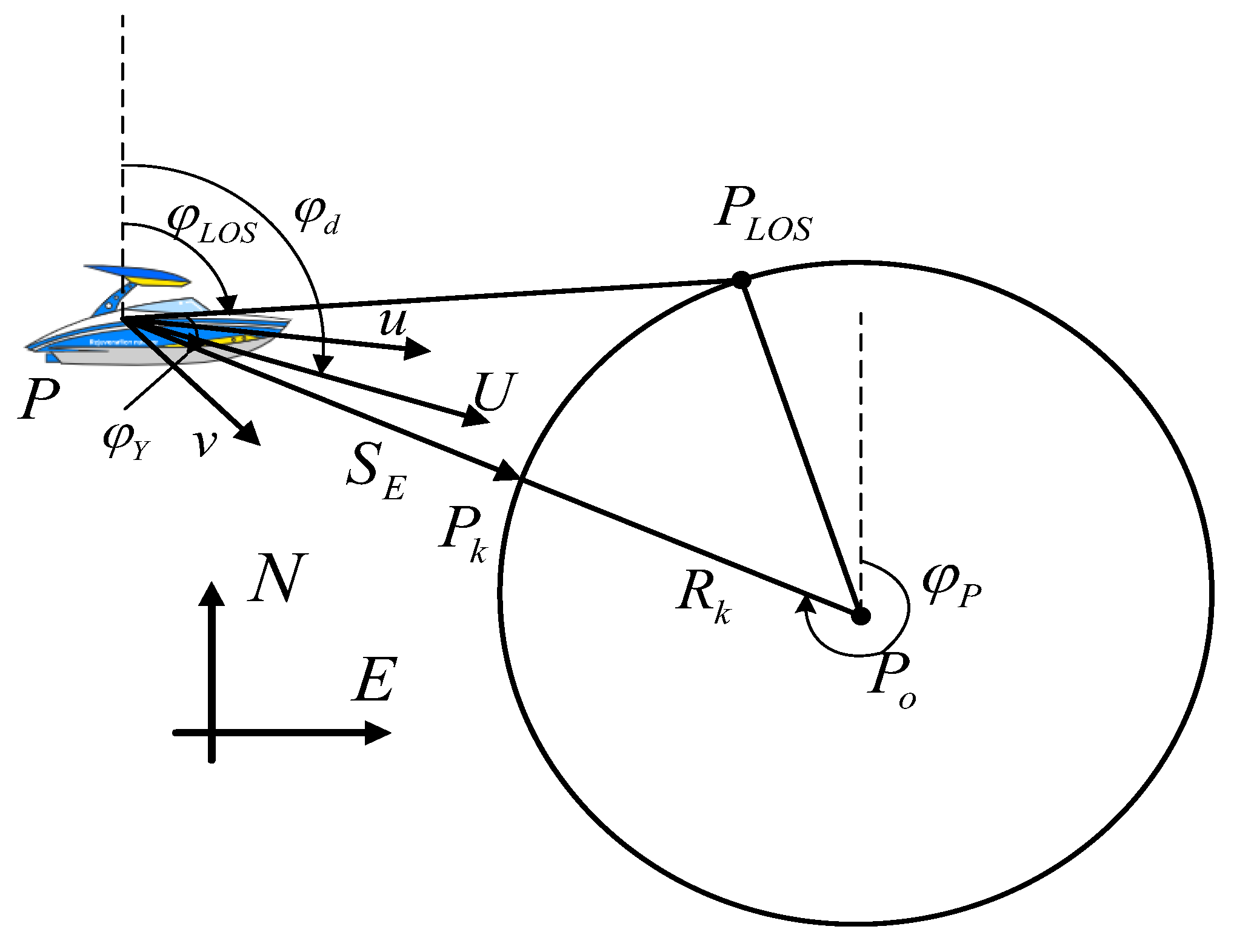
3. Sigmoid Function-Based Line-of-Sight Circular Path Guidance Strategy
- (1)
- The conventional line-of-sight method is suitable only for straight-line tracking and not for curve tracking. The existing curve LOS method needs to convert the system coordinate into the Serret-Frenet coordinate system when conducting curve path tracking. However, the LOS method proposed here does not require conversion, so the algorithm is more intuitive and practical.
- (2)
- The compensation item is introduced to ensure the convergence performance under different values. When is large, the compensation item is large, which ensures the transient guidance performance and allows the USV to converge to the path faster. When is small, the response compensation becomes smaller to avoid oscillation.
- (3)
- The curved path LOS guidance law is based on the traditional LOS guidance principle but includes the overall measures to deal with environmental interference. The new guidance law overcomes the disadvantages of the traditional sight law, which is vulnerable to environmental interference, while retaining the intuition and simplicity of the traditional line-of-sight guidance.
4. Neural Network-Based Control Law
4.1. Control Law Design
4.1.1. Yaw Motion Controller Design
4.1.2. Surge Motion Controller Design
- 1
- Neural networks have the ability to learn arbitrary functions, and its self-learning ability can avoid complex mathematical analysis that occupies an important position in traditional adaptive control theory. Aiming at solving the highly nonlinear control problems that cannot be solved by traditional control methods, the hidden neurons of multi-layer neural networks adopt an activation function with a nonlinear mapping function, which can approximate arbitrary nonlinear functions, providing an effective solution for nonlinear control problems. This method can be widely used to solve control problems with uncertain models.
- 2
- The sliding mode control is combined with the neural network to approximate the nonlinear control system, and the neural network is used to realize the adaptive approximation of the internal and external disturbances of the system, which can effectively reduce the fuzzy gain. The adaptive law of neural networks is derived from the Lyapunov function, and the stability and convergence of the entire closed-loop system are ensured through the adjustment of adaptive weights.
4.2. Stability Analysis
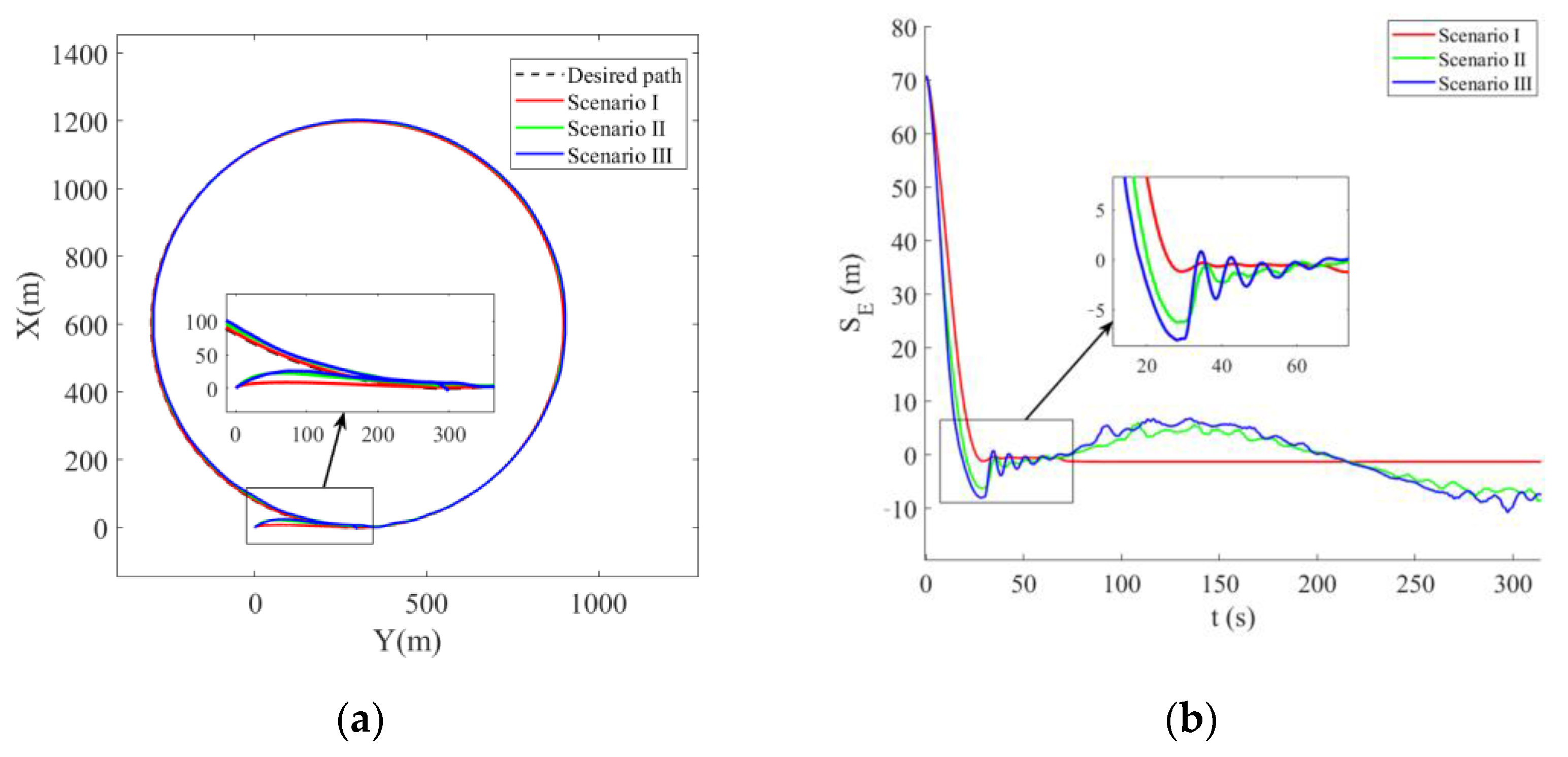
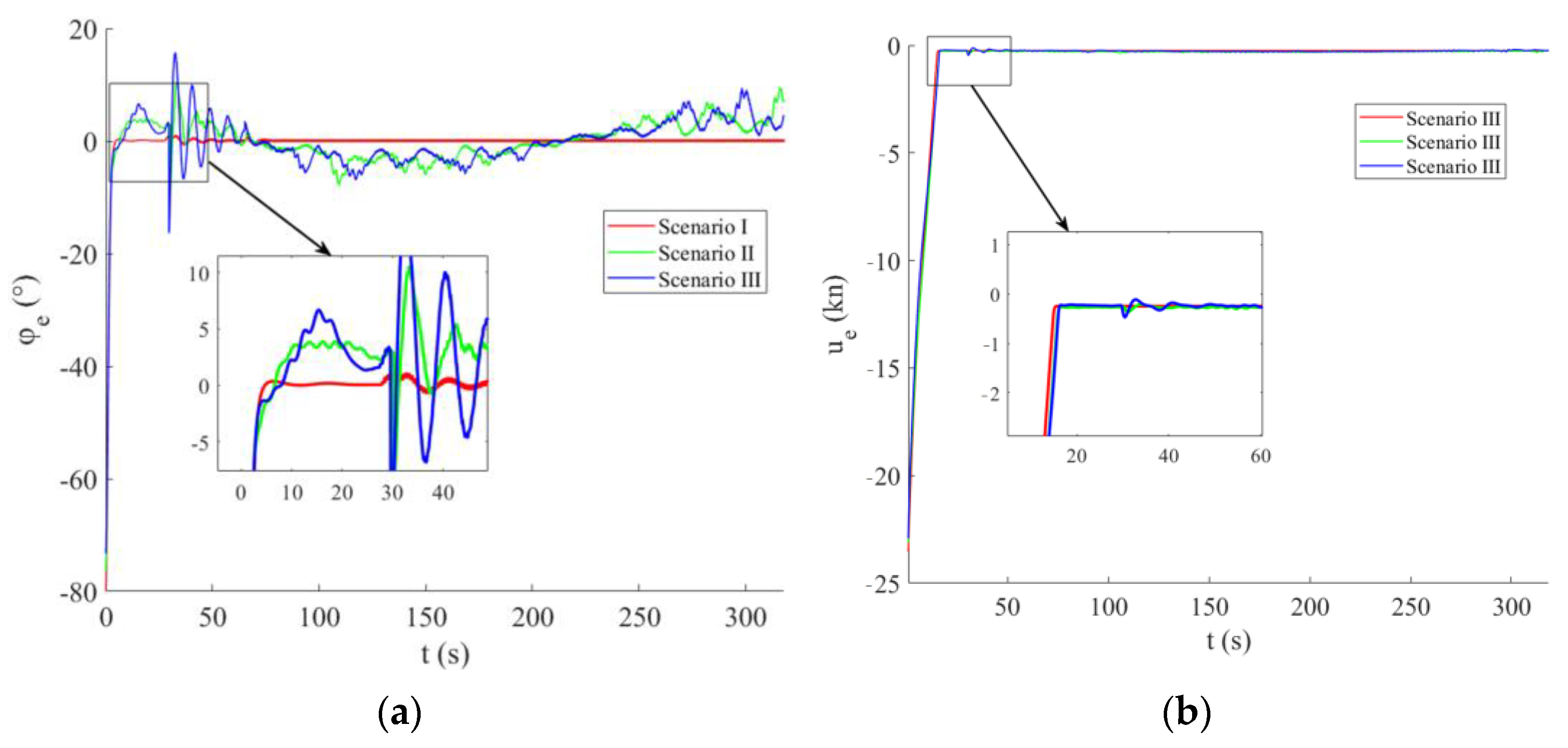
5. Simulation Verification
5.1. System Configuration
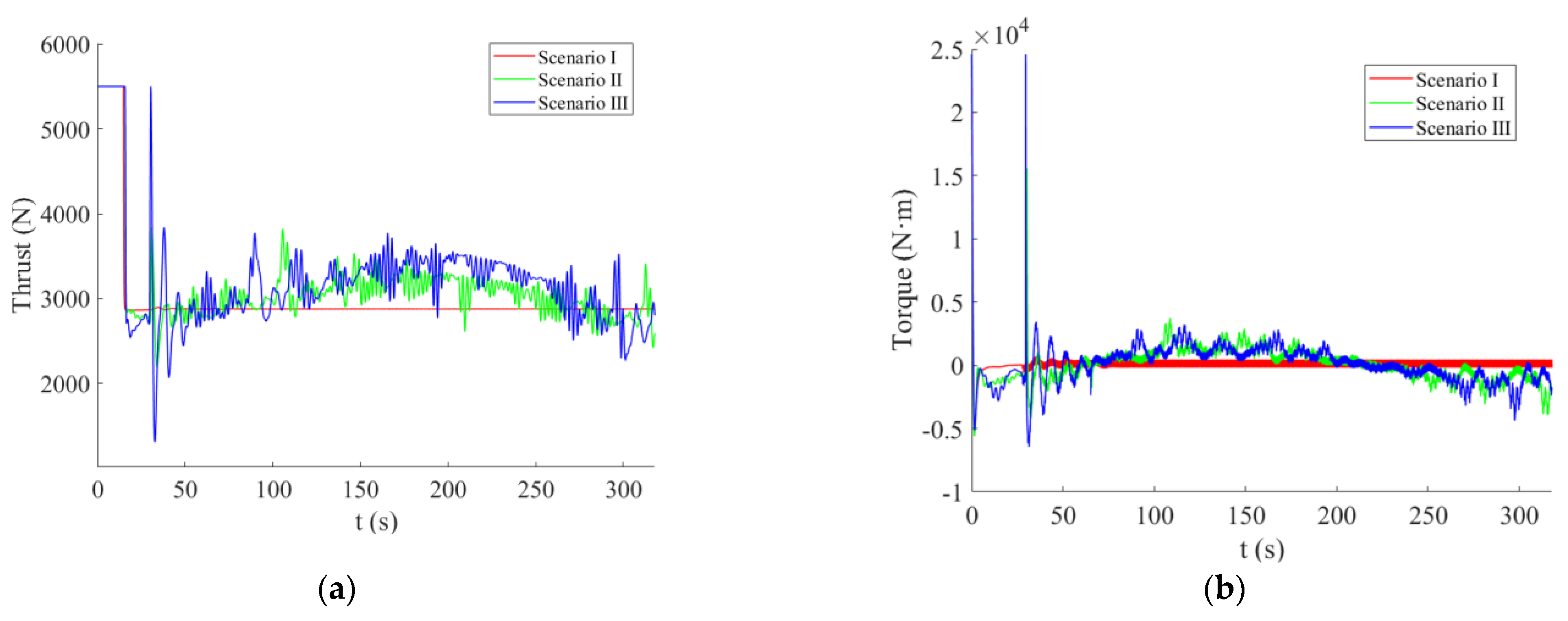
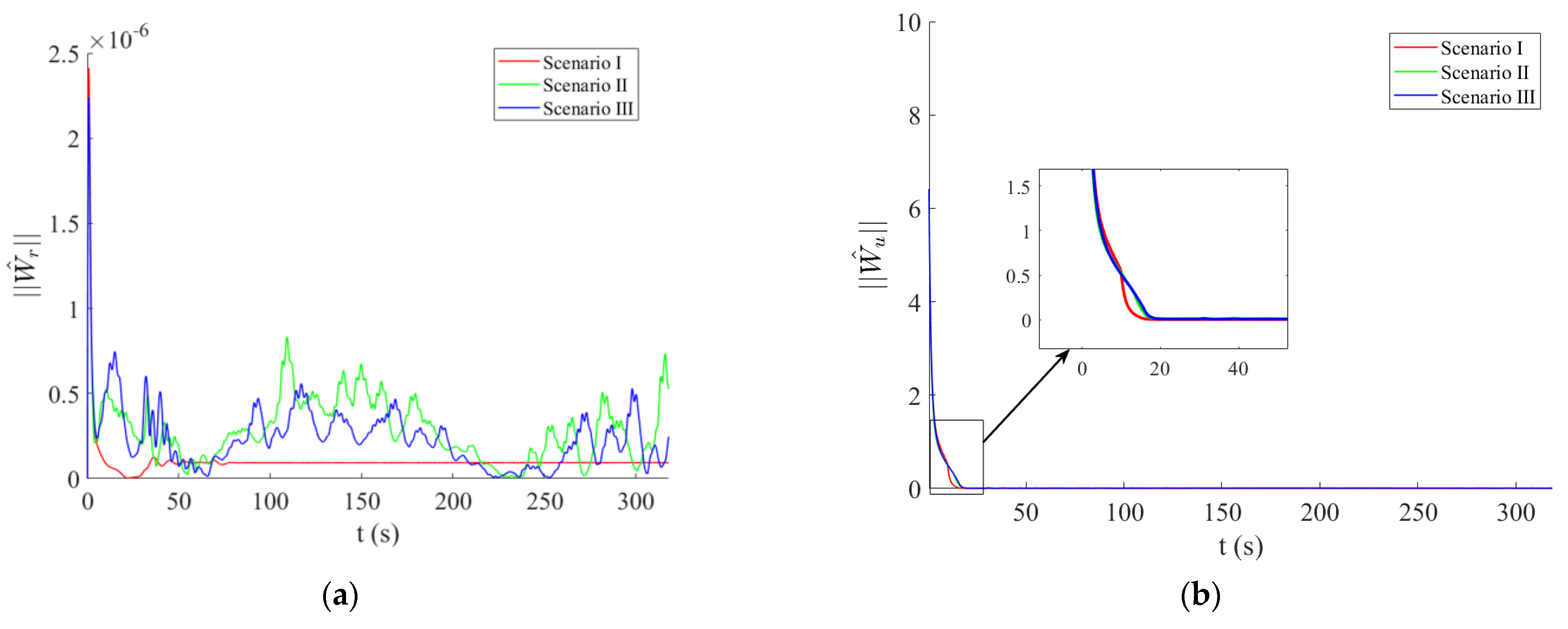
5.2. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, Z.; Sun, J.; Oh, S. Design, analysis and experimental validation of a robust nonlinear path following controller for marine surface vessels. Automatica 2009, 45, 1649–1658. [Google Scholar] [CrossRef]
- Zheng, Z.; Sun, L.; Xie, L. Error-Constrained LOS Path Following of a Surface Vessel with Actuator Saturation and Faults. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1794–1805. [Google Scholar] [CrossRef]
- Ghommam, J.; Mnif, F. Coordinated path-following control for a group of underactuated surface vessels. IEEE Trans. Ind. Electron. 2009, 56, 3951–3963. [Google Scholar] [CrossRef]
- Zheng, Z. Moving path following control for a surface vessel with error constraint. Automatica 2020, 118, 109040. [Google Scholar] [CrossRef]
- Qin, H.; Chen, X.; Sun, Y. Adaptive state-constrained trajectory tracking control of unmanned surface vessel with actuator saturation based on RBFNN and tan-type barrier Lyapunov function. Ocean Eng. 2022, 253, 110966. [Google Scholar] [CrossRef]
- Sandeepkumar, R.; Rajendran, S.; Mohan, R.; Pascoal, A. A unified ship manoeuvring model with a nonlinear model predictive controller for path following in regular waves. Ocean Eng. 2022, 243, 110165. [Google Scholar] [CrossRef]
- Ghommem, J.; MniF, F.; Derbel, N. Path following for underactuated marine craft using line of sight algorithm. In Proceedings of the MESM 2005: 7th Middle East Simulation Multiconference, Porto, Portugal, 24–26 October 2005; pp. 20–26. [Google Scholar]
- Zhou, B.; Huang, B.; Su, Y.; Zheng, Y.; Zheng, S. Fixed-time neural network trajectory tracking control for underactuated surface vessels. Ocean Eng. 2021, 236, 109416. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-sight path following for dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. Control Syst. Technol. 2014, 23, 820–827. [Google Scholar] [CrossRef]
- Fossen, T.I.; Breivik, M.; Skjetne, R. Line-of-sight path following of underactuated marine craft. IFAC Proc. Vol. 2003, 36, 211–216. [Google Scholar] [CrossRef]
- Borhaug, E.; Pavlov, A.; Pettersen, K.Y. Integral LOS Control for Path Following of Underactuated Marine Surface Vessels in the Presence of Constant Ocean Currents. In Proceedings of the 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008; pp. 4984–4991. [Google Scholar]
- Nelson, D.R.; Barber, D.B.; McLain, T.W.; Beard, R.W. Vector field path following for miniature air vehicles. IEEE Trans. Robot. 2007, 23, 519–529. [Google Scholar] [CrossRef]
- Xu, H.; Soares, C.G. Vector field path following for surface marine vessel and parameter identification based on LS-SVM. Ocean Eng. 2016, 113, 151–161. [Google Scholar] [CrossRef]
- Xu, H.; Hinostroza, M.A.; Guedes Soares, C. Modified Vector Field Path-Following Control System for an Underactuated Autonomous Surface Ship Model in the Presence of Static Obstacles. J. Mar. Sci. Eng. 2021, 9, 652. [Google Scholar] [CrossRef]
- Caharija, W.; Candeloro, M.; Pettersen, K.Y.; Sørensen, A.J. Relative Velocity Control and Integral LOS for Path Following of Underactuated Surface Vessels. IFAC Proc. Vol. 2012, 45, 380–385. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z.; Wang, H. Predictor-based LOS guidance law for path following of underactuated marine surface vehicles with sideslip compensation. Ocean Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Wang, N.; Sun, Z.; Yin, J.; Zou, Z.; Su, S.-F. Fuzzy unknown observer-based robust adaptive path following control of underactuated surface vehicles subject to multiple unknowns. Ocean Eng. 2019, 176, 57–64. [Google Scholar] [CrossRef]
- Wan, L.; Su, Y.; Zhang, H.; Shi, B.; AbouOmar, M.S. An improved integral light-of-sight guidance law for path following of unmanned surface vehicles. Ocean Eng. 2020, 205, 107302. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Bai, Y.; Zhao, Y. Fuzzy-Based Optimal Adaptive Line-of-Sight Path Following for Underactuated Unmanned Surface Vehicle with Uncertainties and Time-Varying Disturbances. Math. Probl. Eng. 2018, 2018 Pt. 2, 7512606. [Google Scholar] [CrossRef]
- Liu, F.; Shen, Y.; He, B.; Wang, D.; Wan, J.; Sha, Q.; Qin, P. Drift angle compensation-based adaptive line-of-sight path following for autonomous underwater vehicle. Appl. Ocean Res. 2019, 93, 101943. [Google Scholar] [CrossRef]
- Bin, Z.; Bing, H.; Lei, M.; Weikai, W.; Yumin, S. Adaptive path tracking control of underactuated unmanned surface vessels based on the frontal point of view. Harbin Gongcheng Daxue Xuebao J. Harbin Eng. Univ. 2023, 44. Available online: https://harbinengineeringjournal.com/index.php/journal/article/view/19 (accessed on 12 September 2023).
- Moe, S.; Pettersen, K.Y.; Fossen, T.I.; Gravdahl, J.T. Line-of-sight curved path following for underactuated USVs and AUVs in the horizontal plane under the influence of ocean currents. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; pp. 38–45. [Google Scholar]
- Lekkas, A.M.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control. Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Qiu, B.; Wang, G.; Fan, Y.; Mu, D.; Sun, X. Course Controller Design for Unmanned Surface Vehicle Based on Trajectory Linearization Control with Input Saturation. In Proceedings of the 2019 31st Chinese Control and Decision Conference (CCDC 2019), Nanchang, China, 3–5 June 2019; pp. 281–286. [Google Scholar]
- Daly, J.M.; Tribou, M.J.; Waslander, S.L. Robotics Society of, J. A Nonlinear Path Following Controller for an Underactuated Unmanned Surface Vessel. In Proceedings of the 2012 IEEE/RSJ International Conference On Intelligent Robots And Systems (Iros), Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 82–87. [Google Scholar]
- Liu, T.; Dong, Z.; Du, H.; Song, L.; Mao, Y. Path Following Control of the Underactuated USV Based On the Improved Line-of-Sight Guidance Algorithm. Pol. Marit. Res. 2017, 24, 3–11. [Google Scholar] [CrossRef]
- Liu, Z. Practical backstepping control for underactuated ship path following associated with disturbances. IET Intell. Transp. Syst. 2019, 13, 834–840. [Google Scholar] [CrossRef]
- Chen, X.; Tan, W.W. Tracking control of surface vessels via fault-tolerant adaptive backstepping interval type-2 fuzzy control. Ocean Eng. 2013, 70, 97–109. [Google Scholar] [CrossRef]
- Zhou, B.; Huang, Z.; Huang, B.; Su, Y.; Zhu, C. Dynamic event-triggered trajectory tracking control for underactuated marine surface vessels with positive minimum inter-event time guarantees. Ocean Eng. 2022, 263, 112344. [Google Scholar] [CrossRef]
- Cui, R.; Chen, L.; Yang, C.; Chen, M. Extended State Observer-Based Integral Sliding Mode Control for an Underwater Robot With Unknown Disturbances and Uncertain Nonlinearities. IEEE Trans. Ind. Electron. 2017, 64, 6785–6795. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K. Neural network-based target tracking control of underactuated autonomous underwater vehicles with a prescribed performance. Ocean Eng. 2018, 167, 239–256. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, G.; Qiao, L.; Zhang, W. Adaptive output-feedback formation control for underactuated surface vessels. Int. J. Control 2020, 93, 400–409. [Google Scholar] [CrossRef]
- Park, B.S.; Yoo, S.J. Robust fault-tolerant tracking with predefined performance for underactuated surface vessels. Ocean Eng. 2016, 115, 159–167. [Google Scholar] [CrossRef]
- Alkhazzan, A.; Wang, J.; Tunç, C.; Ding, X.; Yuan, Z.; Nie, Y. On Existence and Continuity Results of Solution for Multi-time Scale Fractional Stochastic Differential Equation. Qual. Theory Dyn. Syst. 2023, 22, 49. [Google Scholar] [CrossRef]
- Tunç, C. Some stability and boundedness conditions for non-autonomous differential equations with deviating arguments. Electron. J. Qual. Theory Differ. Equ. 2010, 2010, 1–12. [Google Scholar] [CrossRef]
- Lerbs, H.W.; Lewis, E.V.; Goodrich, G.J. 11th International Towing Tank Conference: Report of Seakeeping Committee. [EB/OL]. Available online: https://ittc.info/media/2681/index.pdf (accessed on 12 September 2023).
- Fossen, T.I. Guidance and Control of Ocean Vehicles. Ph.D. Thesis, University of Trondheim, Trondheim, Norway, 1999. ISBN: 0-471-94113-1. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass Coefficient | Hydrodynamic Coefficient | ||
|---|---|---|---|
| First Order | Second Order | Third Order | |
| Scenarios | Sea State Level | Average Wave Height (m) | Wind Speed (kn) | Current Speed (kn) |
|---|---|---|---|---|
| I | Claim water | 0 | 0 | 0 |
| II | Level 1 | 0.05 | 1 | 3 |
| III | Level 3 | 0.88 | 8 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Y.; Zhang, L.; Huang, W.; Chen, X. Neural Network-Based Adaptive Sigmoid Circular Path-Following Control for Underactuated Unmanned Surface Vessels under Ocean Disturbances. J. Mar. Sci. Eng. 2023, 11, 2160. https://doi.org/10.3390/jmse11112160
Ren Y, Zhang L, Huang W, Chen X. Neural Network-Based Adaptive Sigmoid Circular Path-Following Control for Underactuated Unmanned Surface Vessels under Ocean Disturbances. Journal of Marine Science and Engineering. 2023; 11(11):2160. https://doi.org/10.3390/jmse11112160
Chicago/Turabian StyleRen, Yi, Lei Zhang, Wenbin Huang, and Xi Chen. 2023. "Neural Network-Based Adaptive Sigmoid Circular Path-Following Control for Underactuated Unmanned Surface Vessels under Ocean Disturbances" Journal of Marine Science and Engineering 11, no. 11: 2160. https://doi.org/10.3390/jmse11112160
APA StyleRen, Y., Zhang, L., Huang, W., & Chen, X. (2023). Neural Network-Based Adaptive Sigmoid Circular Path-Following Control for Underactuated Unmanned Surface Vessels under Ocean Disturbances. Journal of Marine Science and Engineering, 11(11), 2160. https://doi.org/10.3390/jmse11112160