
Command-Filter-Based Region-Tracking Control for Autonomous Underwater Vehicles with Measurement Noise

Abstract
:1. Introduction
- (1)
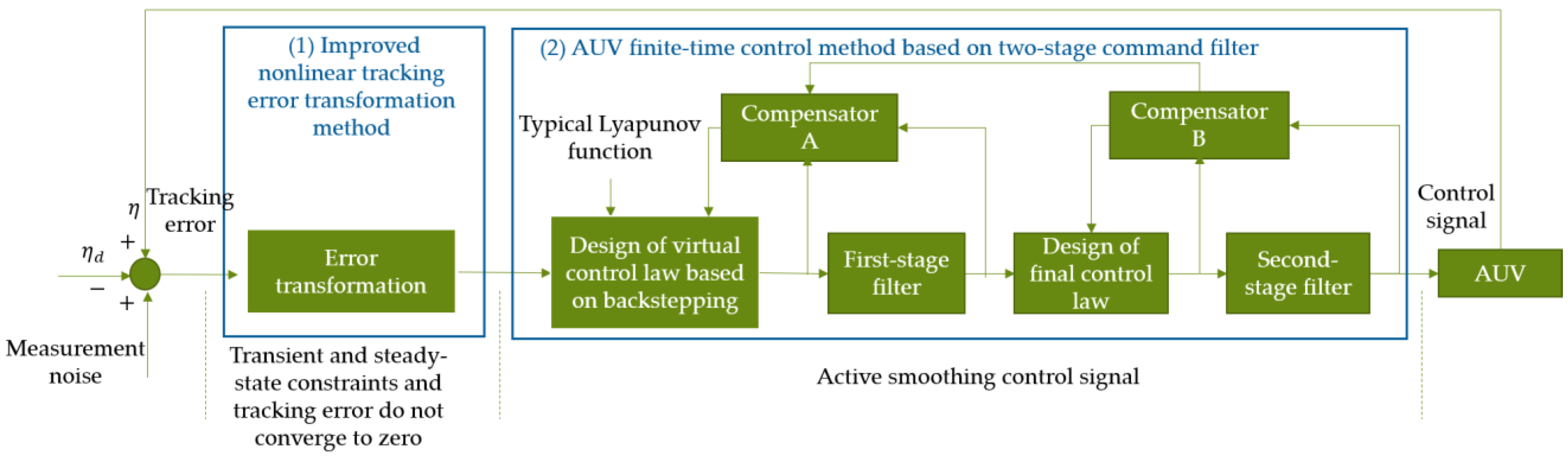
- In order to ensure that the AUV tracking error meets the transient and steady-state performance constraints without converging to zero, an improved nonlinear tracking error transformation method is proposed in this paper. Different from previous studies [28,31], which used error transformation and the Lyapunov function in coordination to achieve this goal, we do not need to design a Lyapunov function but only to carry out nonlinear transformation of tracking errors based on allowable error variables, hyperbolic tangent functions, and performance functions. The objective can be realized by stabilizing the transformed error variable.
- (2)
- Aiming at the problem of strong fluctuation of the control signal when tracking an AUV region with measurement noise, a finite-time control method based on a two-stage command filter is proposed in this paper. Different from the traditional method, which directly uses the control law derived from the backstep method as the control signal, in this paper we adopt a finite-time sliding mode differentiator to filter the virtual and final control laws and design a finite-time compensator to compensate the filtering loss and stabilize the closed-loop system. Among them, the filtered final control law is used as the control signal to reduce the fluctuation of control signal caused by measurement noise.
2. Problem Statement and Preliminaries
2.1. Analysis of the Existing Problems and Their Causes in Traditional Methods
2.2. Preliminaries
- (1)
- Dynamic model
- (2)
- Lemma and assumption
3. AUV Finite-Time Region-Tracking Control Method Based on Command Filter
3.1. The Idea of This Method and Difference between This Method and Traditional Method
3.1.1. Idea of the Method in This Paper
- (1)
- Improved nonlinear tracking error transformation method
- (2)
- AUV finite-time control method based on two-stage command filter
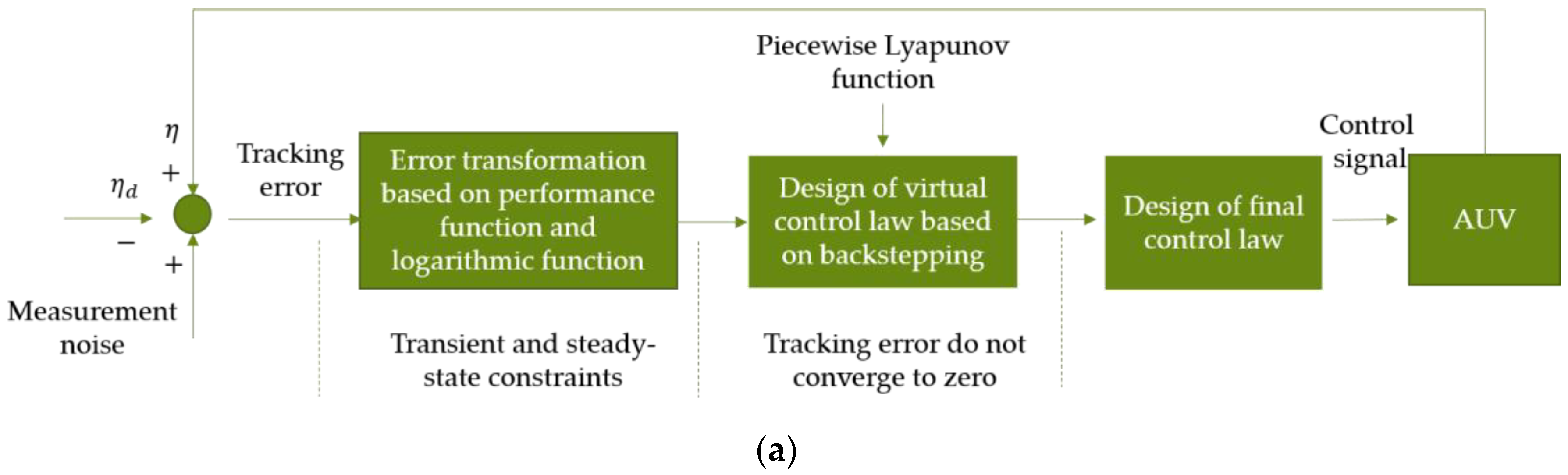
3.1.2. Difference between This Method and Traditional Method
- (1)
- Treatment of error variables
- (2)
- Smoothing of control signals
3.2. Implementation Process of Proposed Method
3.2.1. Improved Nonlinear Tracking Error Transformation Method
- (1)
- Construct the performance constraint inequality
- (2)
- Introduce tolerance error to rewrite performance constraint inequality
- (3)
- Nonlinear transformation of constrained inequalities
3.2.2. AUV Finite-Time Control Method Based on Second-Stage Command Filter
3.3. Stability Analysis of Closed Loop System
4. Simulation Experiment
4.1. Simulation Settings
- (1)
- Thrust distribution [28,31]: ODIN is an overdriven AUV composed of four horizontal thrusters and four verticals. In order to compare the input control signals of each thruster and subsequently conduct an energy consumption analysis, is written as in the dynamics model, where is a thrust distribution matrix, and is a vector, representing the thrust of eight thrusters. The expression is as follows:
- (2)
- Dead zone and saturation [31]: Dead zone and saturation are the actual constraints of thrust existence and were set as:
- (3)
- Ocean current [31]: In order to get close to the real marine environment, the first-order Gauss–Markov process with Gaussian white noise (mean 1, variance 2) was used to simulate the amplitude of ocean current, and the integral of Gaussian white noise (mean 0, variance 50) was used to represent the phase angle of ocean current.
- (4)
- Noise [31]: In practical applications, a low-pass filter is used to reduce the overamplification effect caused by measurement noise. In this experiment, Gaussian noise (mean 0, variance 0.05) after a low-pass filter (2 rad/s) was added to the original position signal as the noisy position signal, and Gaussian noise (mean 0, variance 0.01) after a low-pass filter (1 rad/s) was added to the original velocity signal as the noisy speed signal.
- (5)
- Fault [31]: Considering the loss of thrust due to possible faults caused by long-term use of the thruster, it is assumed that failure of thruster T2 occurs; that is, the actual output of thruster T2 is only , where
- (6)
- Expected trajectory [31] is described as
- (7)
- The initial state [31] of the AUV is: .
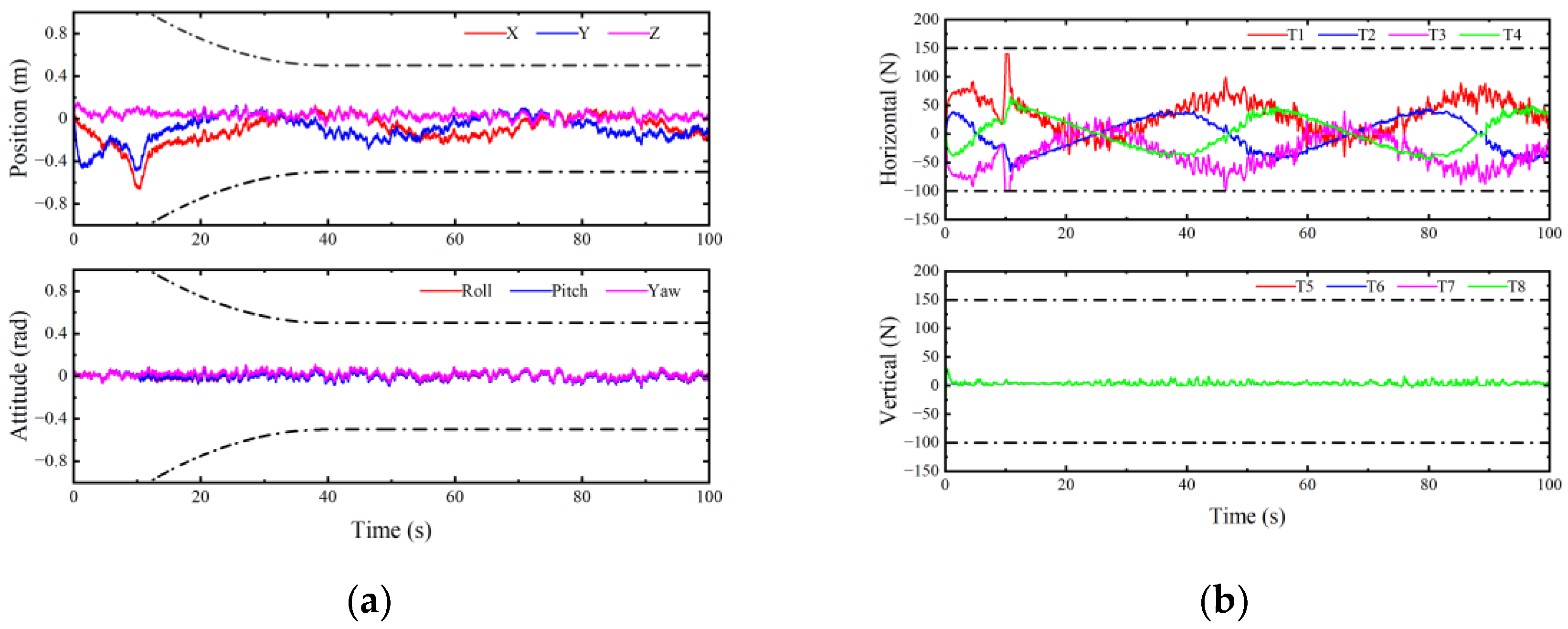
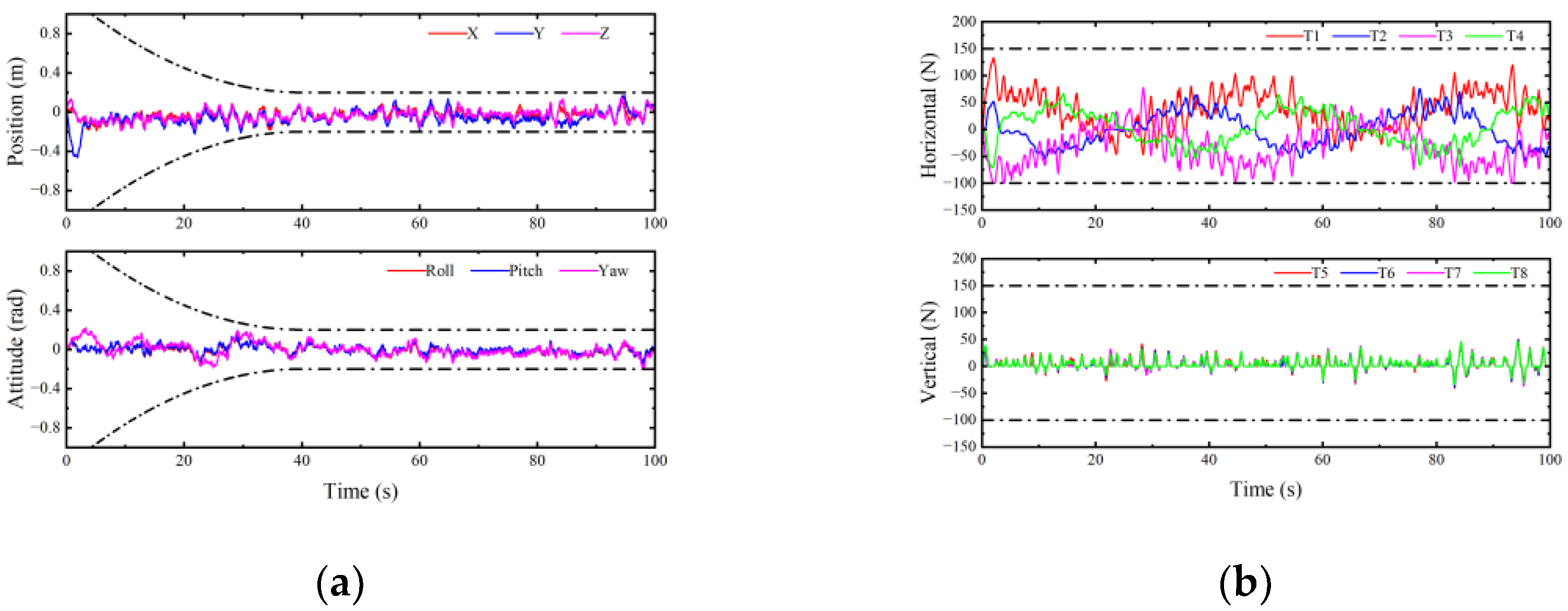
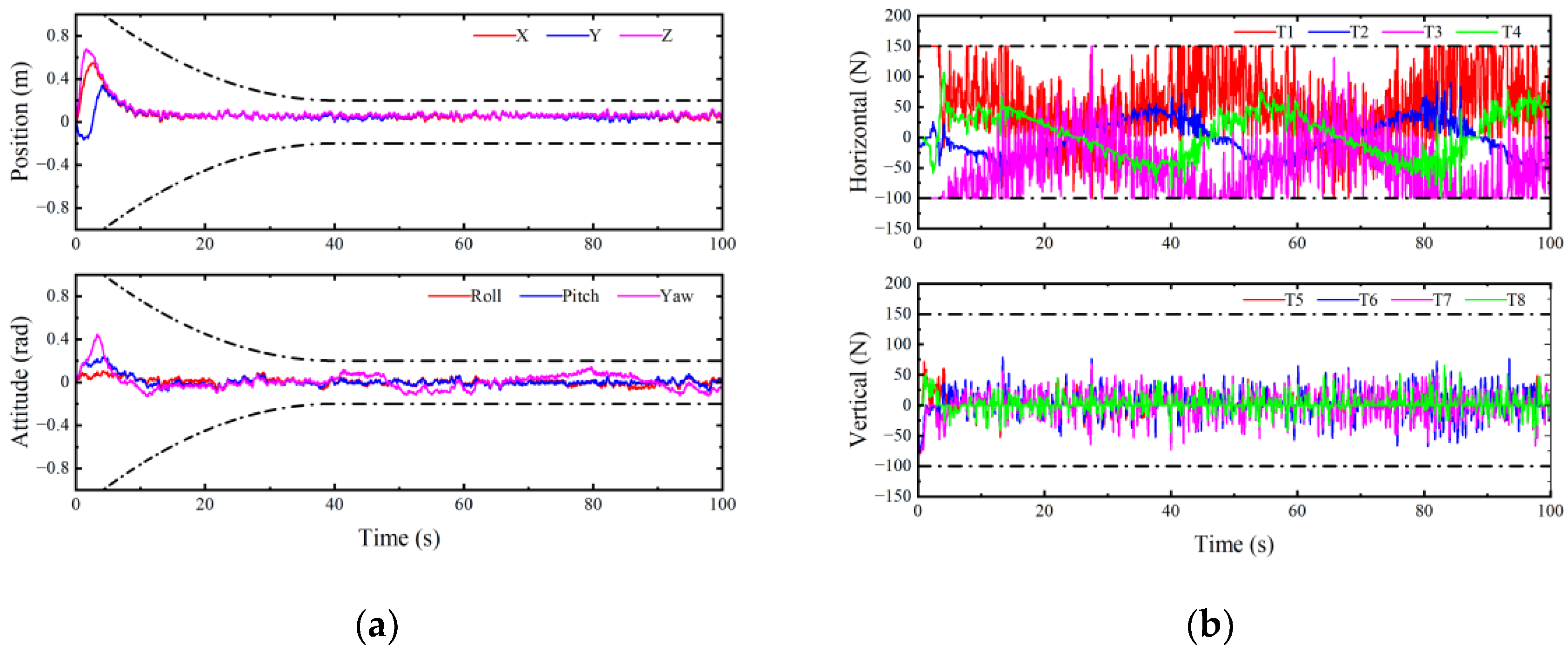
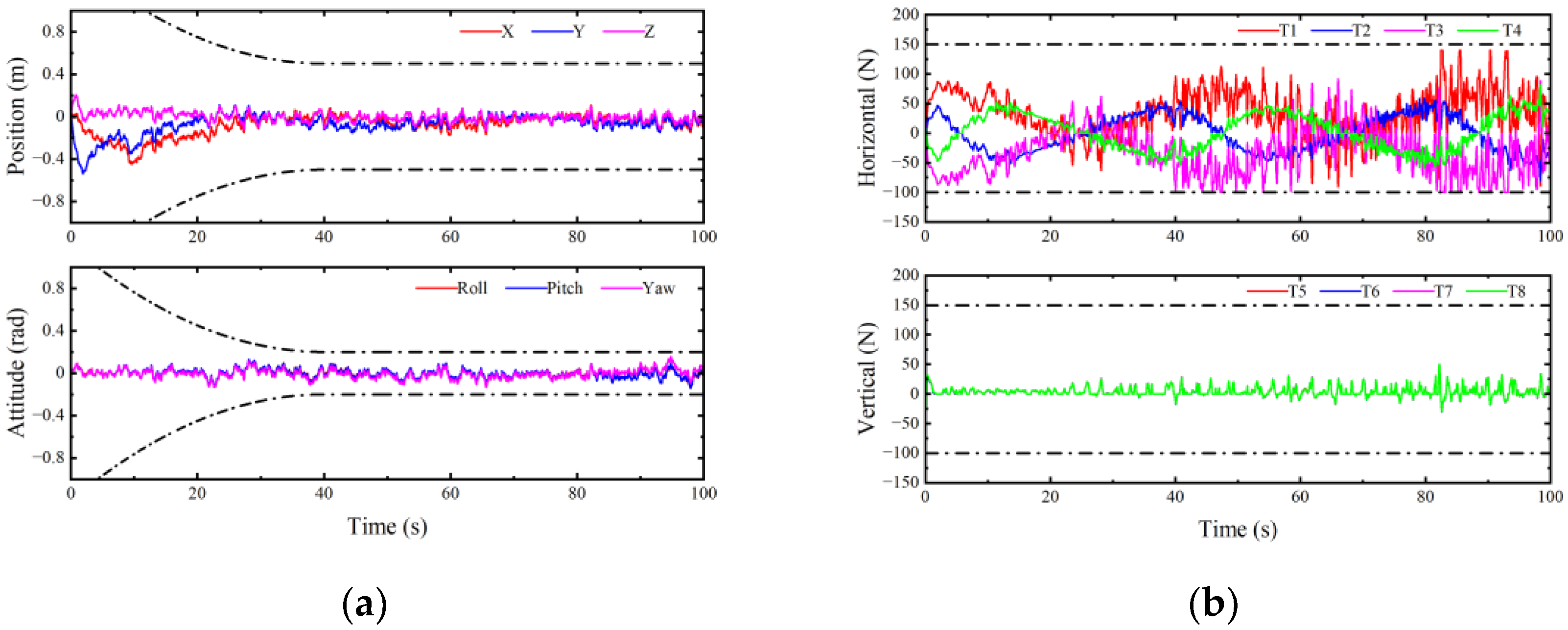
4.2. Experimental Results and Analysis
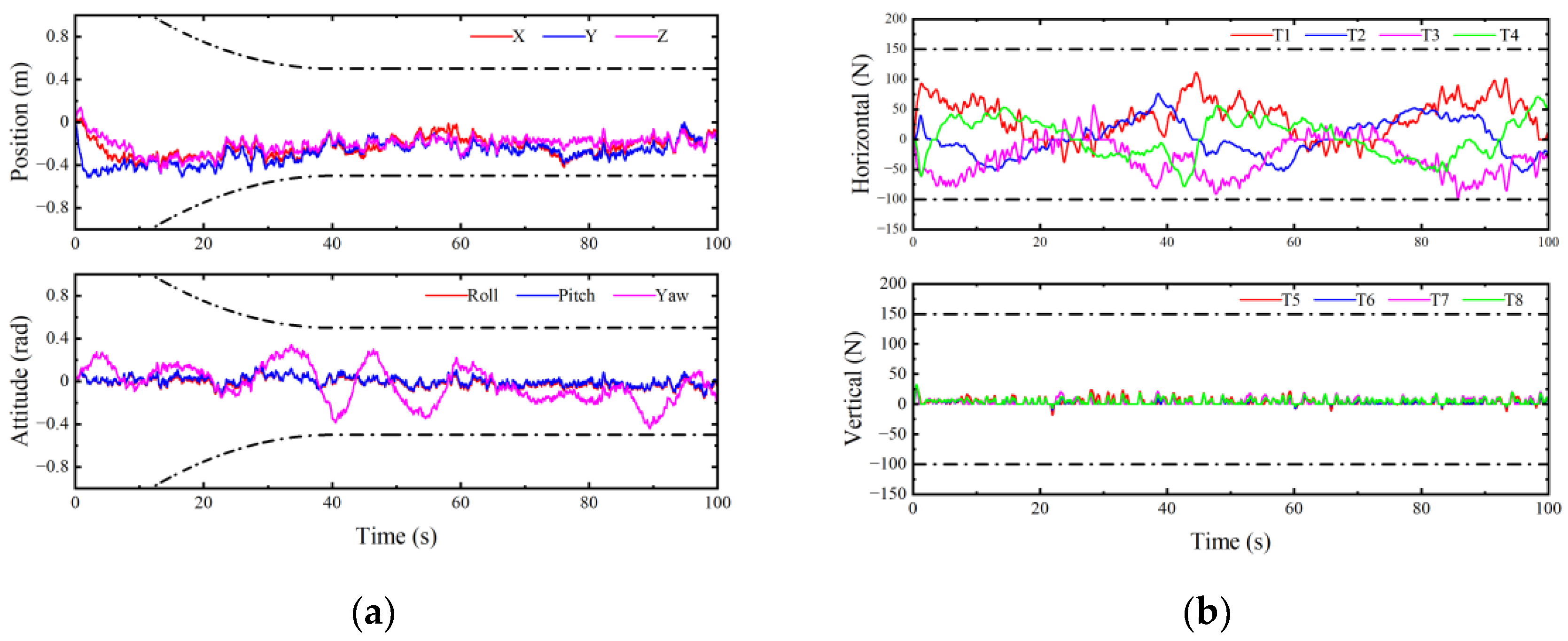
- (1)
- Experimental results and analysis in case 1
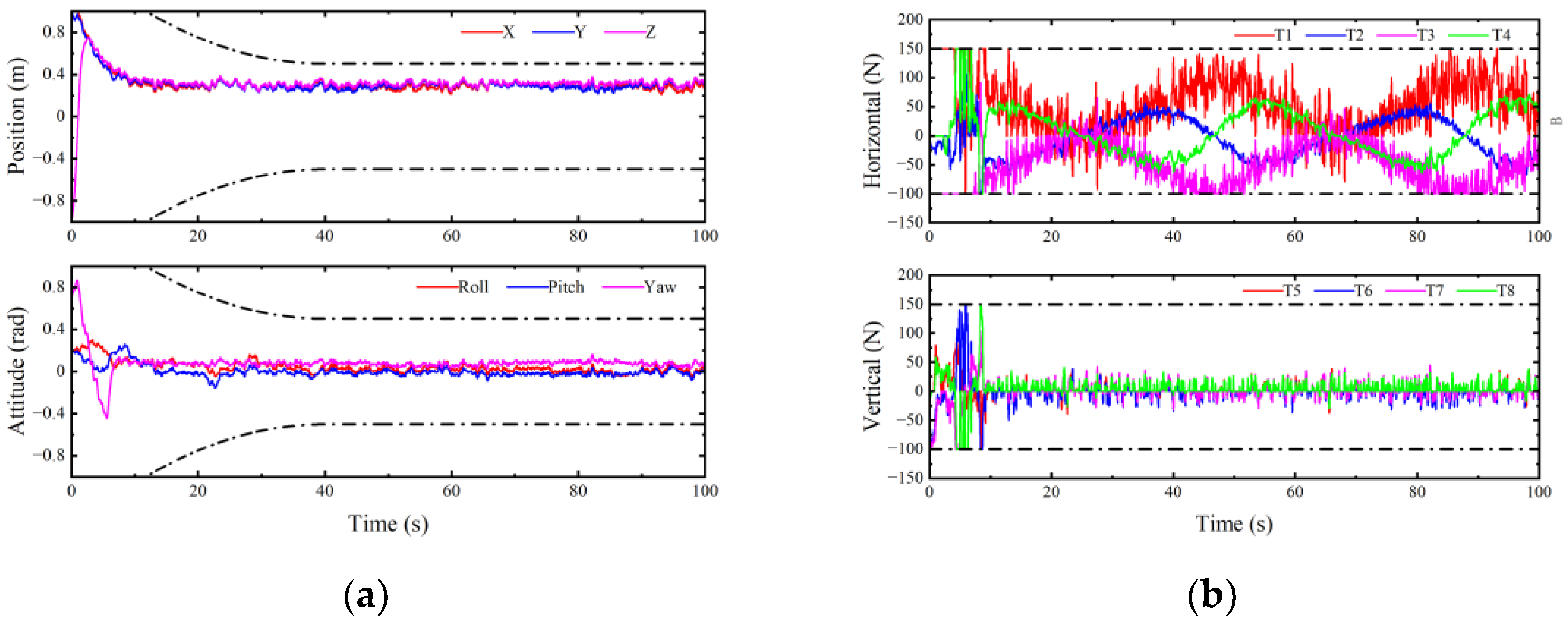
- (2)
- Experimental results and analysis of case 2
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tabataba’i-Nasab, F.S.; Khalaji, A.K.; Moosavian, S.A.A. Adaptive nonlinear control of an autonomous underwater vehicle. Trans. Inst. Meas. Control 2019, 41, 3121–3131. [Google Scholar] [CrossRef]
- Zereik, E.; Bibuli, M.; Mišković, N.; Ridao, P.; Pascoal, A. Challenges and future trends in marine robotics. Annu. Rev. Control 2018, 46, 350–368. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A. Trajectory tracking for autonomous underwater vehicle: An adaptive approach. Ocean Eng. 2019, 172, 511–522. [Google Scholar] [CrossRef]
- Xiao, B.; Yang, X.; Karimi, H.R.; Qiu, J. Asymptotic Tracking Control for a More Representative Class of Uncertain Nonlinear Systems with Mismatched Uncertainties. IEEE Trans. Ind. Electron. 2019, 66, 9417–9427. [Google Scholar] [CrossRef]
- Dai, Y.; Yu, S.; Yan, Y.; Yu, X. An EKF-Based Fast Tube MPC Scheme for Moving Target Tracking of a Redundant Underwater Vehicle-Manipulator System. IEEE ASME Trans. Mechatron. 2019, 24, 2803–2814. [Google Scholar] [CrossRef]
- Sun, W.; Su, S.F.; Wu, Y.; Xia, J.; Nguyen, V.T. Adaptive Fuzzy Control with High-Order Barrier Lyapunov Functions for High-Order Uncertain Nonlinear Systems with Full-State Constraints. IEEE Trans. Cybern. 2020, 50, 3424–3432. [Google Scholar] [CrossRef]
- Cui, R.; Chen, L.; Yang, C.; Chen, M. Extended State Observer-Based Integral Sliding Mode Control for an Underwater Robot with Unknown Disturbances and Uncertain Nonlinearities. IEEE Trans. Ind. Electron. 2017, 64, 6785–6795. [Google Scholar] [CrossRef]
- Chengzhi, Y.; Licht, S.; Haibo, H. Formation Learning Control of Multiple Autonomous Underwater Vehicles with Heterogeneous Nonlinear Uncertain Dynamics. IEEE Trans. Cybern. 2018, 48, 2920–2934. [Google Scholar] [CrossRef]
- Wang, H.; Pan, Y.; Li, S.; Yu, H. Robust Sliding Mode Control for Robots Driven by Compliant Actuators. IEEE Trans. Control. Syst. Technol. 2019, 27, 1259–1266. [Google Scholar] [CrossRef]
- Cheah, C.C.; Sun, Y.C. adaptive-region-control-for-autonomous-underwater-vehicles.pdf. In Proceedings of the Oceans ‘04 MTS/IEEE Techno-Ocean ‘04 Conference, Kobe, Japan, 9–12 November 2004. [Google Scholar]
- Ismail, Z.H.; Faudzi, A.A.; Dunnigan, M.W. Fault-Tolerant Region-Based Control of an Underwater Vehicle with Kinematically Redundant Thrusters. Math. Probl. Eng. 2014, 2014, 527315. [Google Scholar] [CrossRef]
- Sun, X.; Ge, S.S. A DSC approach to adaptive dynamic region-based tracking control for strict-feedback non-linear systems. IET Control. Theory Appl. 2021, 16, 94–111. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M. Region tracking control for autonomous underwater vehicle with control input saturation. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27 July 2020; pp. 2615–2620. [Google Scholar]
- Parisa, S.; Sani, S.K.H. Barrier Lyapunov functions-based adaptive neural tracking control for non-strict feedback stochastic nonlinear systems with full-state constraints: A command filter approach. Math. Control Relat. Fields 2023, 13, 988–1007. [Google Scholar]
- Liu, J. Converse Barrier Functions via Lyapunov Functions. IEEE Trans. Autom. Control 2022, 67, 497–503. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Y.-J.; Chen, A.; Tong, S.; Chen, C.L.P. Integral Barrier Lyapunov function-based adaptive control for switched nonlinear systems. Sci. China Inf. Sci. 2020, 63, 132203. [Google Scholar] [CrossRef]
- Liu, C.; Wang, H.; Liu, X.; Zhou, Y. Adaptive Finite-Time Fuzzy Funnel Control for Nonaffine Nonlinear Systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2894–2903. [Google Scholar] [CrossRef]
- Hu, J.; Trenn, S.; Zhu, X. Funnel Control for Relative Degree One Nonlinear Systems with Input Saturation. In Proceedings of the 2022 European Control Conference (ECC), London, UK, 11–14 July 2022; pp. 227–232. [Google Scholar]
- Wang, S.; Yu, H.; Yu, J.; Na, J.; Ren, X. Neural-Network-Based Adaptive Funnel Control for Servo Mechanisms with Unknown Dead-Zone. IEEE Trans Cybern 2020, 50, 1383–1394. [Google Scholar] [CrossRef]
- Li, J.; Tian, Z.Y.; Zhang, H.H.; Li, W.B. Robust Finite-Time Control of a Multi-AUV Formation Based on Prescribed Performance. J. Mar. Sci. Eng. 2003, 11, 897. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K. Neural network-based target tracking control of underactuated autonomous underwater vehicles with a prescribed performance. Ocean. Eng. 2018, 167, 239–256. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Sun, Y.; Lewis, F.L. Robust adaptive trajectory tracking control of underactuated autonomous underwater vehicles with prescribed performance. Int. J. Robust Nonlinear Control 2019, 29, 4629–4643. [Google Scholar] [CrossRef]
- Qin, H.; Wu, Z.; Sun, Y.; Zhang, C.; Lin, C. Fault-Tolerant Prescribed Performance Control Algorithm for Underwater Acoustic Sensor Network Nodes with Thruster Saturation. IEEE Access 2019, 7, 69504–69515. [Google Scholar] [CrossRef]
- Liu, H.; Meng, B.; Tian, X. Finite-Time Prescribed Performance Trajectory Tracking Control for Underactuated Autonomous Underwater Vehicles Based on a Tan-Type Barrier Lyapunov Function. IEEE Access 2022, 10, 53664–53675. [Google Scholar] [CrossRef]
- Zhou, C.; Dai, C.; Yang, J.; Li, S. Disturbance observer-based tracking control with prescribed performance specifications for a class of nonlinear systems subject to mismatched disturbances. Asian J. Control 2023, 25, 359–370. [Google Scholar] [CrossRef]
- Wang, Y.; Su, B.; Guo, B. Finite time state tracking control based on prescribed performance for a class of constrained nonlinear systems. Int. J. Robust Nonlinear Control 2023, 33, 7114–7129. [Google Scholar] [CrossRef]
- Li, J.; Du, J.; Chen, C.L.P. Command-Filtered Robust Adaptive NN Control with the Prescribed Performance for the 3-D Trajectory Tracking of Underactuated AUVs. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 6545–6557. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Zhang, M.; Wang, S. Adaptive region tracking control with prescribed transient performance for autonomous underwater vehicle with thruster fault. Ocean Eng. 2020, 196, 106804. [Google Scholar] [CrossRef]
- Pagliai, M.; Ridolfi, A.; Gelli, J. Design of a Reconfigurable Autonomous Underwater Vehicle for Offshore Platform Monitoring and Intervention. In Proceedings of the IEEE/OES Autonomous Underwater Vehicle Workshop, Porto, Portugal, 6–9 November 2018. [Google Scholar]
- Le, K.; To, A.; Leighton, B. The SPIR: An AUR for Bridge Pile Cleaning and Condition Assessment. In Proceedings of the IEEE/RSJ International Coference on Intelligant Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021. [Google Scholar]
- Liu, X.; Zhang, M.; Yao, F.; Yin, B.; Chen, J. Barrier Lyapunov function based adaptive region tracking control for underwater vehicles with thruster saturation and dead zone. J. Frankl. Inst. 2021, 358, 5820–5844. [Google Scholar] [CrossRef]
- Farrell, J.A.; Polycarpou, M.; Sharma, M.; Dong, W. Command Filtered Backstepping. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008; Volume 1–12, pp. 1391–1395. [Google Scholar]
- Yu, J.; Shi, P.; Zhao, L. Finite-time command filtered backstepping control for a class of nonlinear systems. Automatica 2018, 92, 173–180. [Google Scholar] [CrossRef]
- Li, C.; Zhang, Y.; Li, P. Full control of a quadrotor using parameter-scheduled backstepping method: Implementation and experimental tests. Nonlinear Dyn. 2017, 89, 1259–1278. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, L.; Yu, H.; Lin, C.; Dong, W. Fuzzy Finite-Time Command Filtered Control of Nonlinear Systems with Input Saturation. IEEE Trans. Cybern. 2018, 48, 2378–2387. [Google Scholar] [CrossRef]
- Gao, Y.; Li, C.; Li, D. Command Filter-Based Control for Spacecraft Attitude Tracking with Pre-Defined Maximum Settling Time Guaranteed. IEEE Access 2021, 9, 69663–69679. [Google Scholar] [CrossRef]
- Wang, H.; Kang, S.; Zhao, X.; Xu, N.; Li, T. Command Filter-Based Adaptive Neural Control Design for Nonstrict-Feedback Nonlinear Systems with Multiple Actuator Constraints. IEEE Trans. Cybern. 2022, 52, 12561–12570. [Google Scholar] [CrossRef] [PubMed]
- Qiu, J.; Sun, K.; Rudas, I.J.; Gao, H. Command Filter-Based Adaptive NN Control for MIMO Nonlinear Systems with Full-State Constraints and Actuator Hysteresis. IEEE Trans. Cybern. 2020, 50, 2905–2915. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Li, M. Discrete-Time Position Control for Autonomous Underwater Vehicle under Noisy Conditions. Appl. Sci. 2021, 11, 5790. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, K.; Cao, Z. System noise variance matrix adaptive Kalman filter method for AUV INS/DVL navigation system. Ocean Eng. 2023, 267, 113269. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Adaptive Two-stage Fast Nonsingular Terminal Sliding Mode Tracking Control for Fully Actuated Autonomous Underwater Vehicles. IEEE J. Ocean Eng. 2019, 44, 363–385. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Double-Loop Integral Terminal Sliding Mode Tracking Control for UUVs with Adaptive Dynamic Compensation of Uncertainties and Disturbances. IEEE J. Ocean Eng. 2019, 44, 29–53. [Google Scholar] [CrossRef]
- Podder, T.K.; Sarkar, N. Fault-tolerant control of an autonomous underwater vehicle under thruster redundancy, Robot. Autom. Syst. 2001, 34, 39–52. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. A Continuous Feedback Approach to Global Strong Stabilization of Nonlinear Systems. IEEE Trans. Autom. Control 2001, 46, 1061–1079. [Google Scholar] [CrossRef]
- Zuo, Z.; Wang, C. Adaptive trajectory tracking control of output constrained multi-rotors systems. IET Control. Theory Appl. 2014, 8, 1163–1174. [Google Scholar] [CrossRef]
- Zhu, Z.; Xia, Y.; Fu, M. Attitude stabilization of rigid spacecraft with finite-time convergence. Int. J. Robust Nonlinear Control 2011, 21, 686–702. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Yang, C.; Yin, B. Finite-time tracking control for autonomous underwater vehicle based on an improved non-singular terminal sliding mode manifold. Int. J. Control 2020, 95, 840–849. [Google Scholar] [CrossRef]
- Amrr, S.M.; Nabi, M.; Tiwari, P.M. A fault-tolerant attitude tracking control of spacecraft using an anti-unwinding robust nonlinear disturbance observer. Proc. Inst. Mech. Eng. Part G–J. Aerosp. Eng. 2019, 233, 6005–6018. [Google Scholar] [CrossRef]
- Fang, X.; Xie, L.; Li, X. Distributed localization in dynamic networks via complex Laplacian. Automatica 2023, 151, 110915. [Google Scholar] [CrossRef]
- Fang, X.; Li, X.; Xie, L. Angle-displacement rigidity theory with application to distributed network localization. IEEE Trans. Autom. Control 2020, 66, 574–2587. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SCIS (N) | SSCS (107 × N2) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | Total | ||
| This paper | 2546 | 1244 | 2695 | 1466 | 1932 | 1546 | 1414 | 1778 | 14,621 | 6.41 |
| [28] | 30,522 | 7107 | 18,611 | 5532 | 7202 | 9463 | 9319 | 8220 | 95,976 | 12.92 |
| [31] | 6737 | 2887 | 6680 | 2932 | 1877 | 1918 | 1938 | 1902 | 26,871 | 6.13 |
| SCIS (N) | SSCS (107 × N2) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | Total | ||
| This paper | 5089 | 2305 | 5261 | 2301 | 3140 | 2937 | 2794 | 3012 | 26,839 | 7.05 |
| [28] | 50,970 | 6857 | 38,130 | 9365 | 12,694 | 21,701 | 19,615 | 11,102 | 170,434 | 13.87 |
| [31] | 15,216 | 4871 | 14,742 | 4877 | 3761 | 3916 | 38,483 | 3794 | 55,025 | 7.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, T.; Wang, Y.; Liu, X.; Zhang, M. Command-Filter-Based Region-Tracking Control for Autonomous Underwater Vehicles with Measurement Noise. J. Mar. Sci. Eng. 2023, 11, 2119. https://doi.org/10.3390/jmse11112119
Lv T, Wang Y, Liu X, Zhang M. Command-Filter-Based Region-Tracking Control for Autonomous Underwater Vehicles with Measurement Noise. Journal of Marine Science and Engineering. 2023; 11(11):2119. https://doi.org/10.3390/jmse11112119
Chicago/Turabian StyleLv, Tu, Yujia Wang, Xing Liu, and Mingjun Zhang. 2023. "Command-Filter-Based Region-Tracking Control for Autonomous Underwater Vehicles with Measurement Noise" Journal of Marine Science and Engineering 11, no. 11: 2119. https://doi.org/10.3390/jmse11112119
APA StyleLv, T., Wang, Y., Liu, X., & Zhang, M. (2023). Command-Filter-Based Region-Tracking Control for Autonomous Underwater Vehicles with Measurement Noise. Journal of Marine Science and Engineering, 11(11), 2119. https://doi.org/10.3390/jmse11112119