

Role of Shape and Kinematics in the Hydrodynamics of a Fish-like Oscillating Hydrofoil


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods: Modeling and Simulation
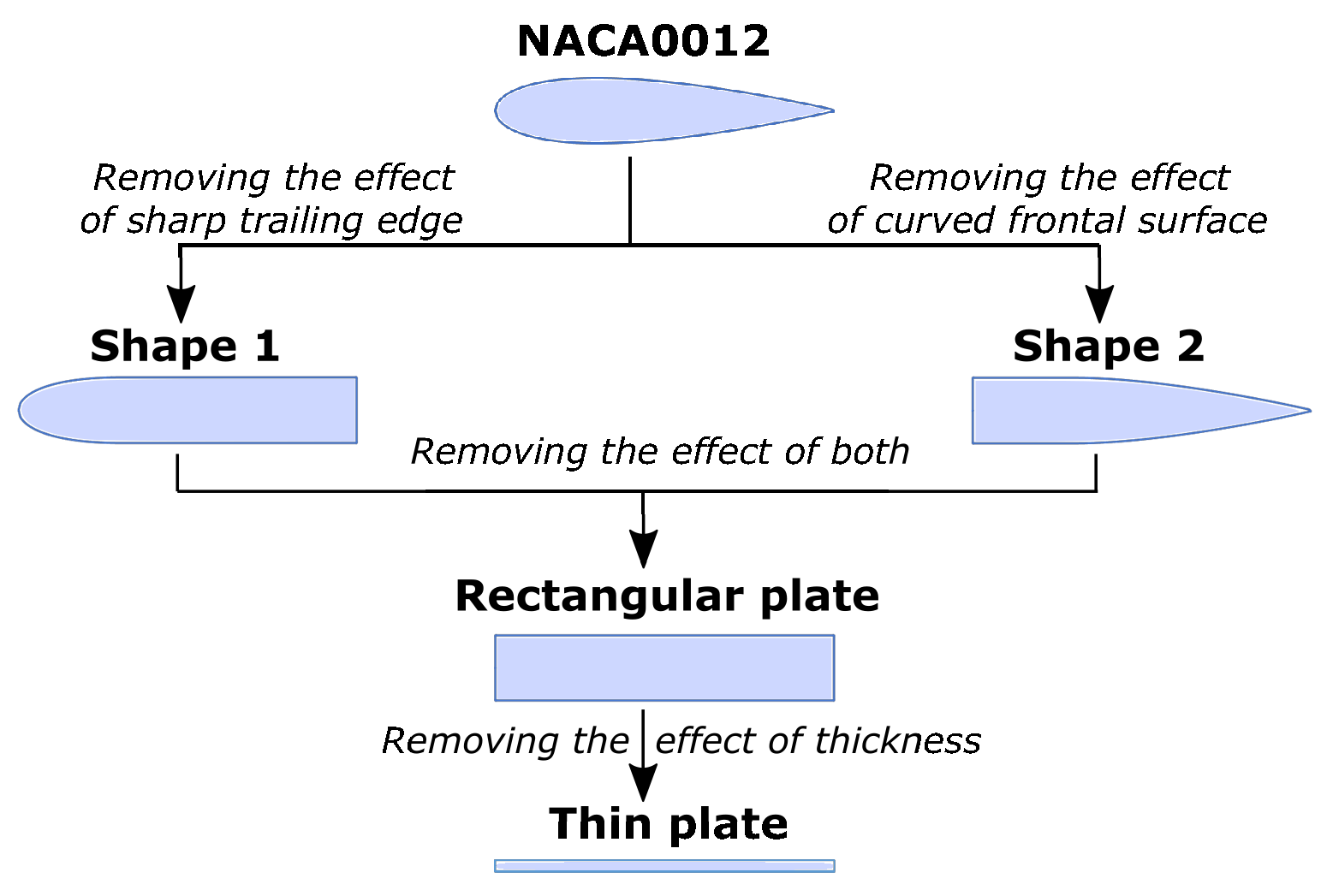
2.1. Mapping the Hydrofoil Shape
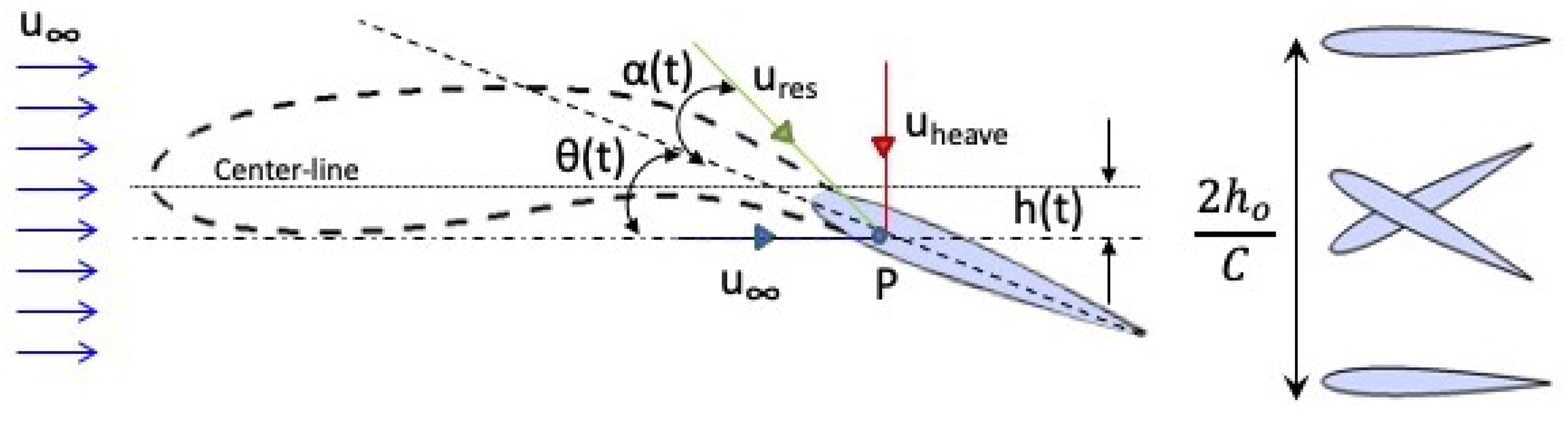
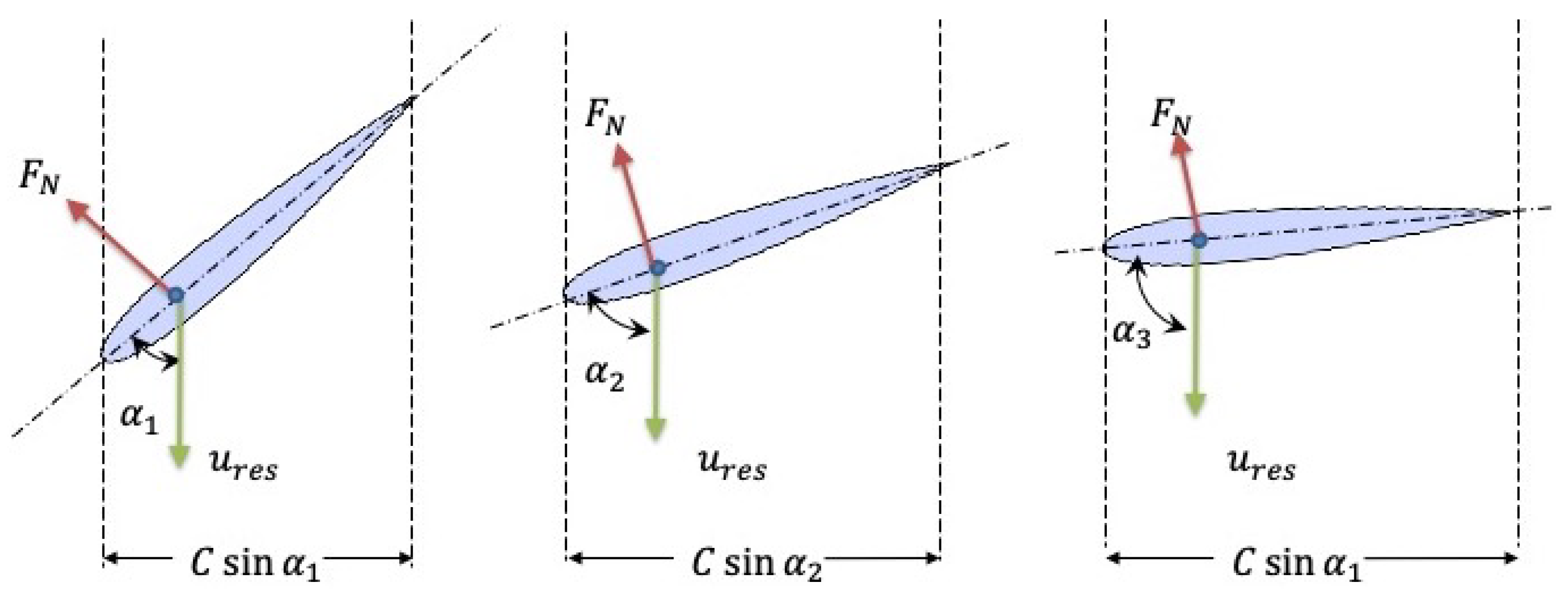
2.2. Oscillation Kinematics and Other Parameters of Interest
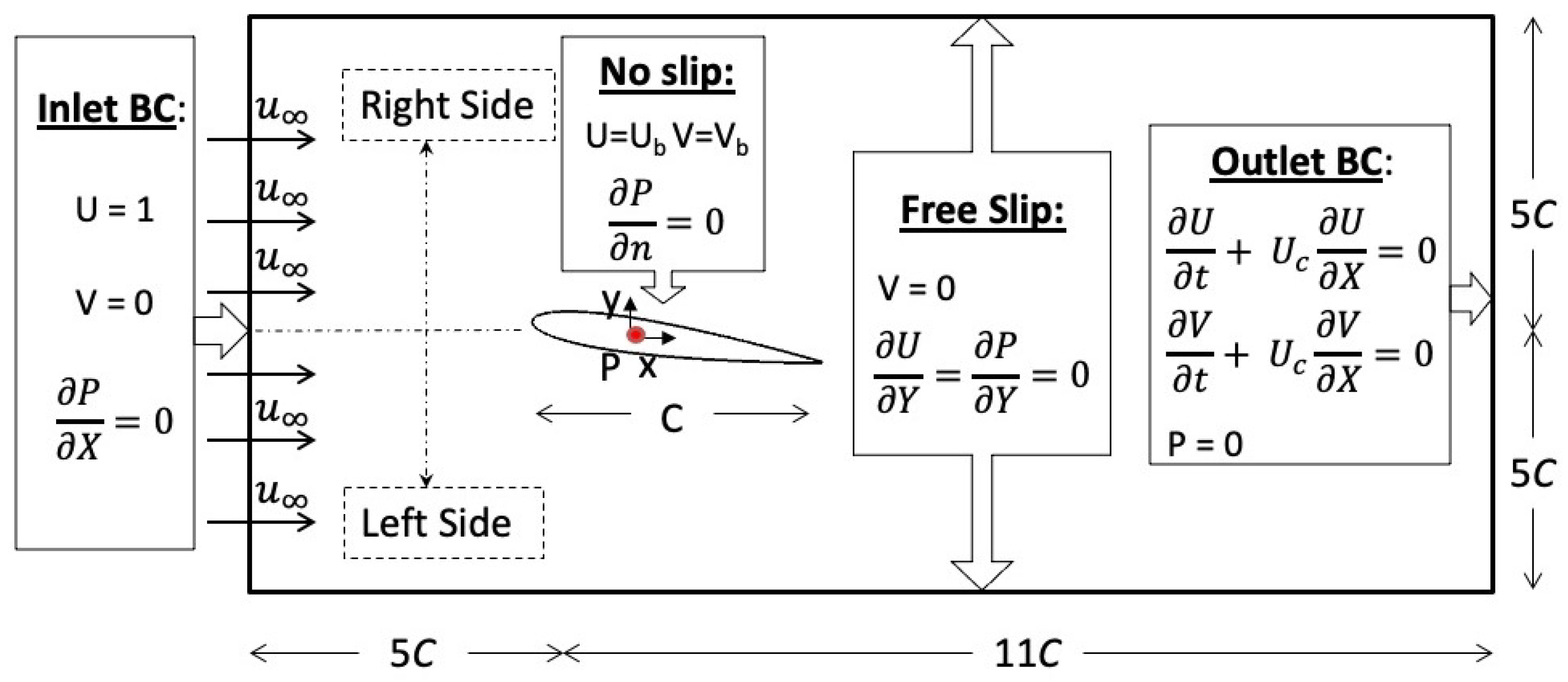
2.3. Governing Equations and Numerical Details
2.4. Computational Details
3. Results
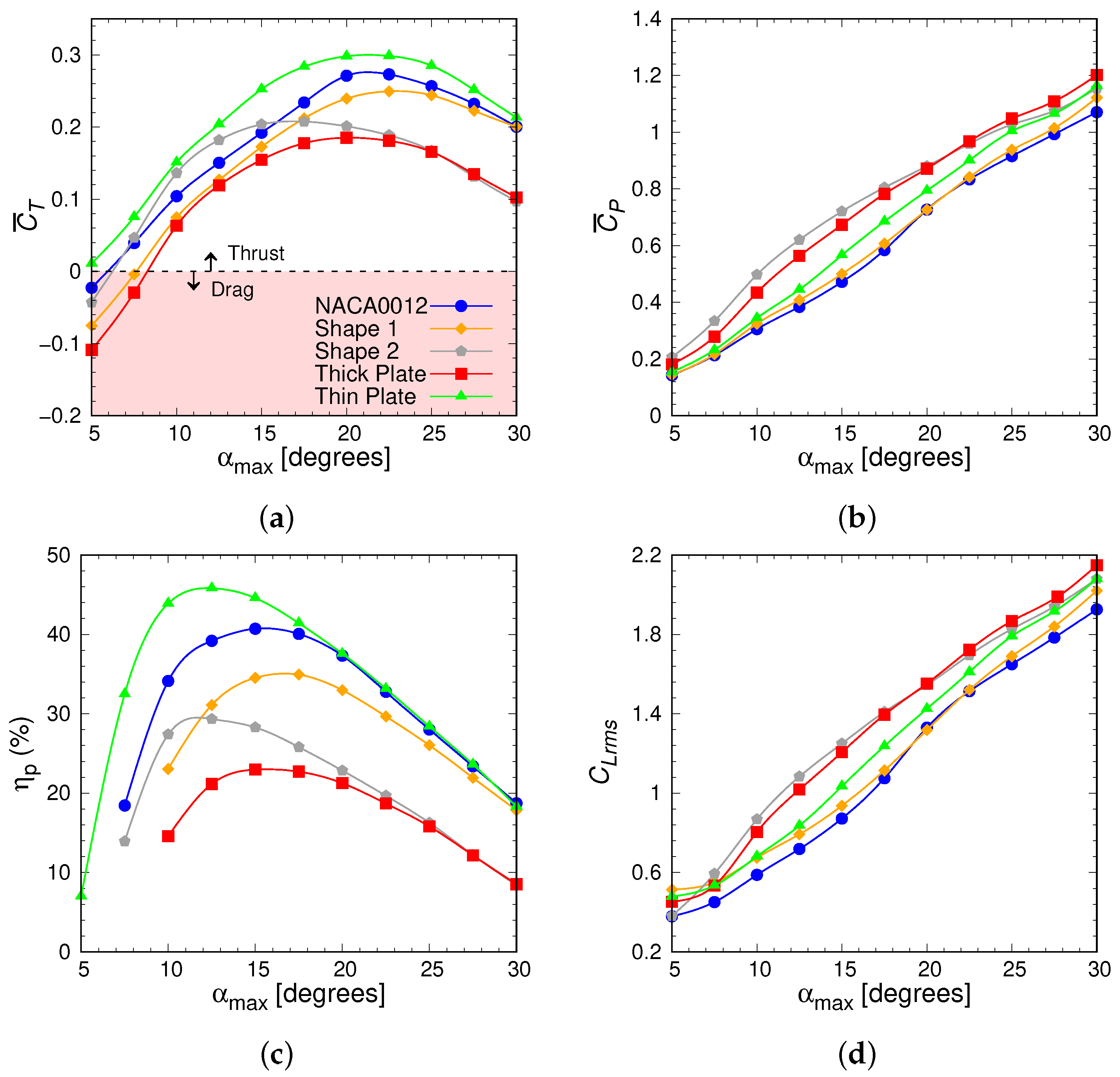
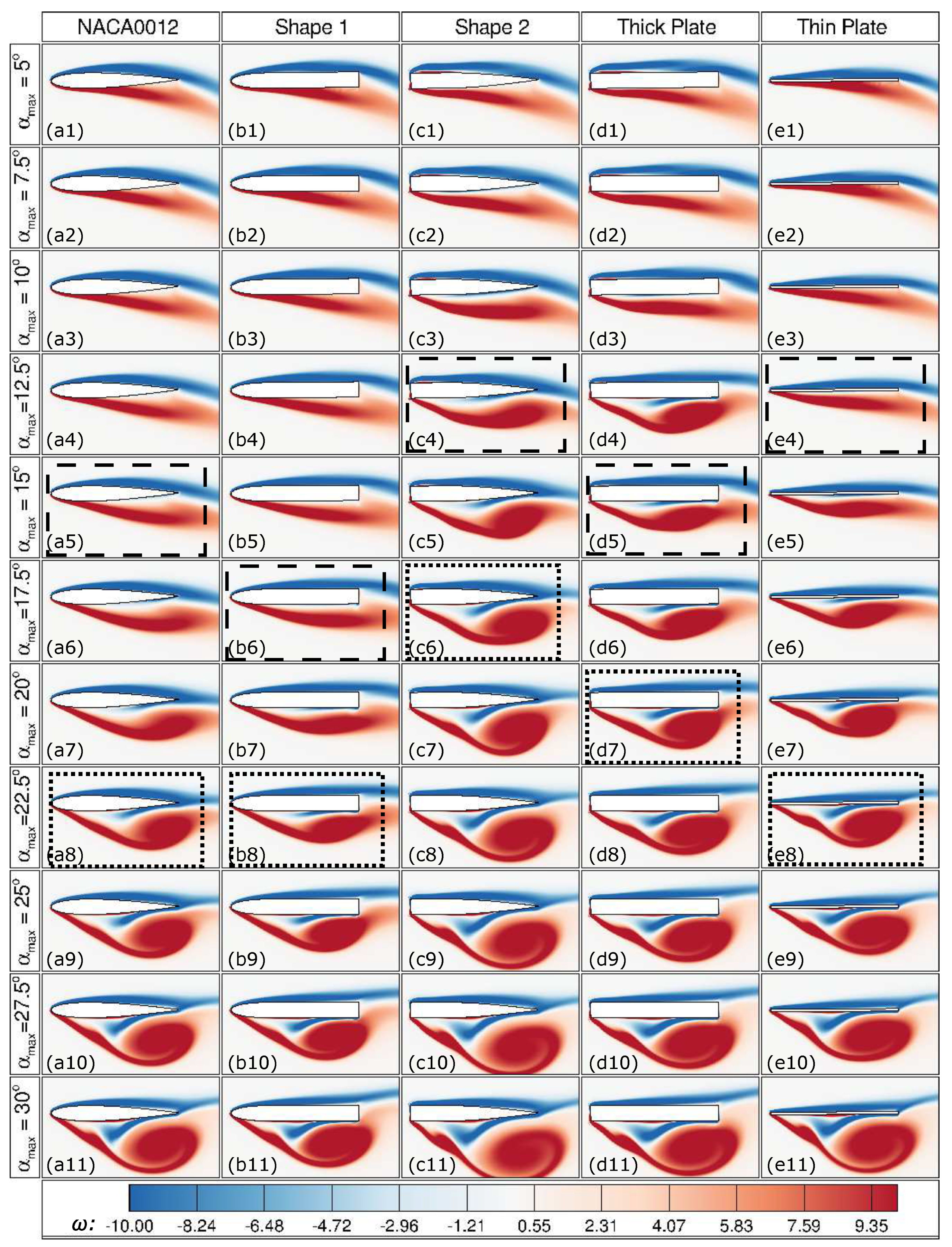
3.1. Effect of Curvature Variations on Hydrodynamic Performance
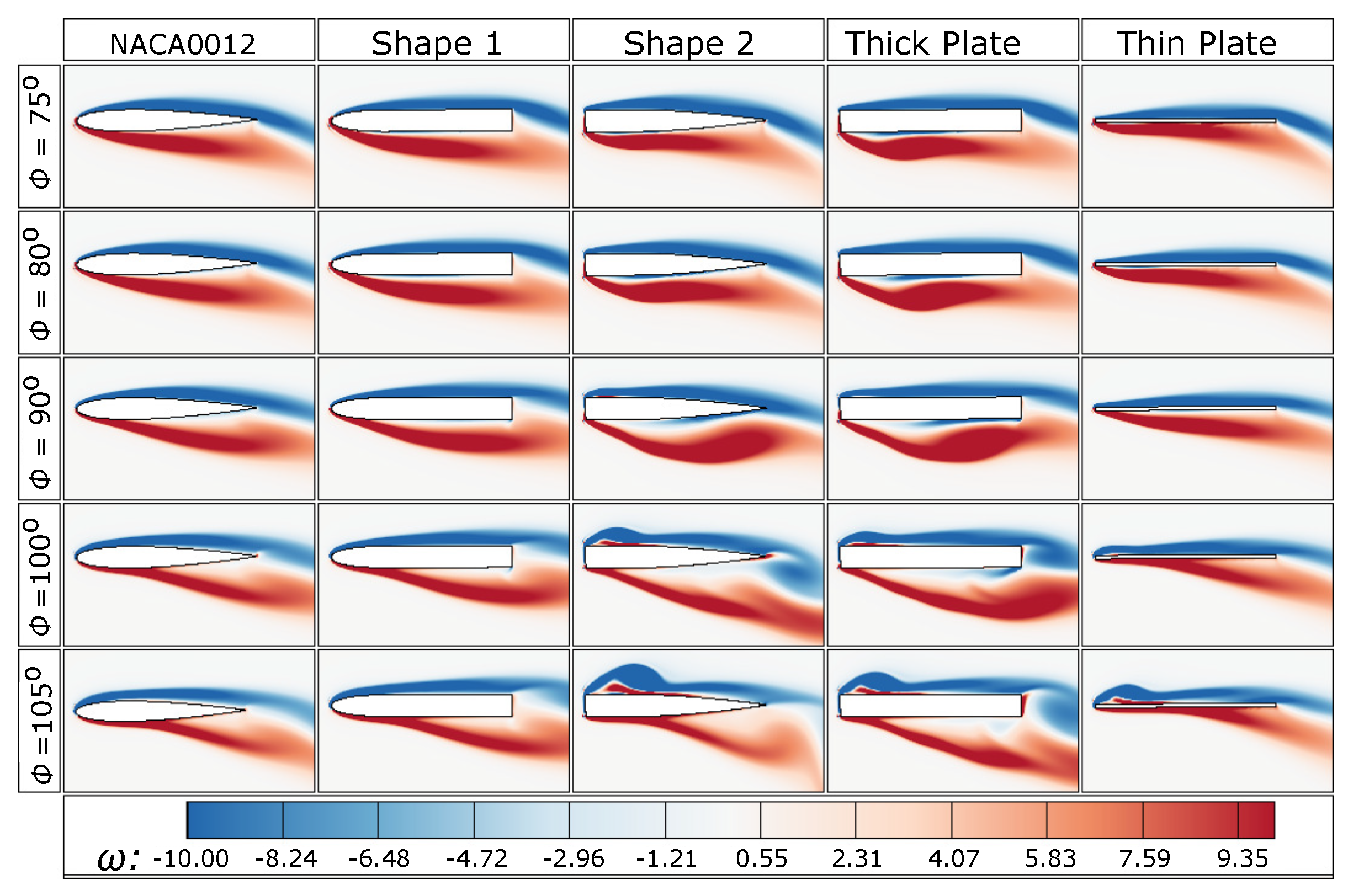
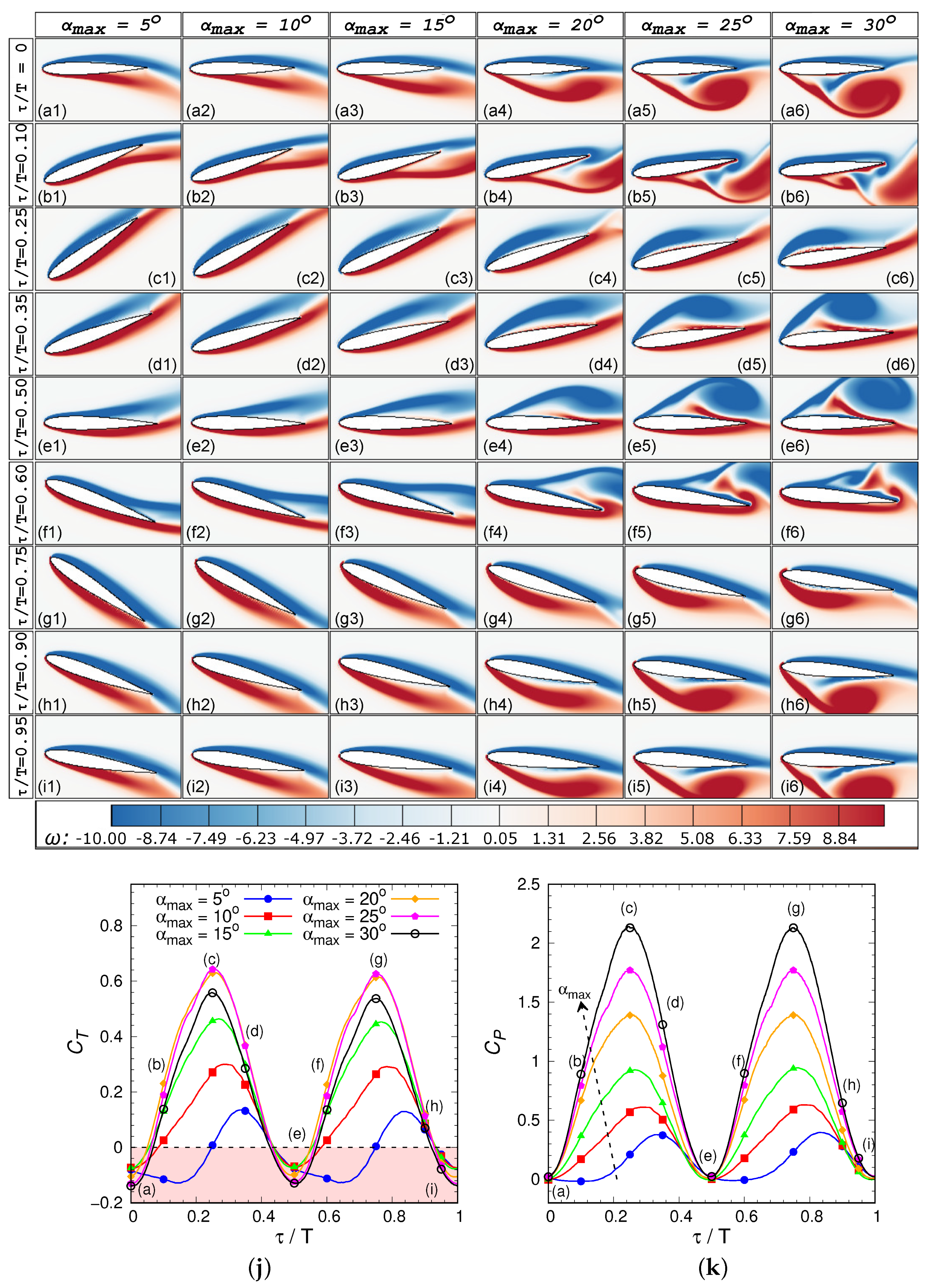
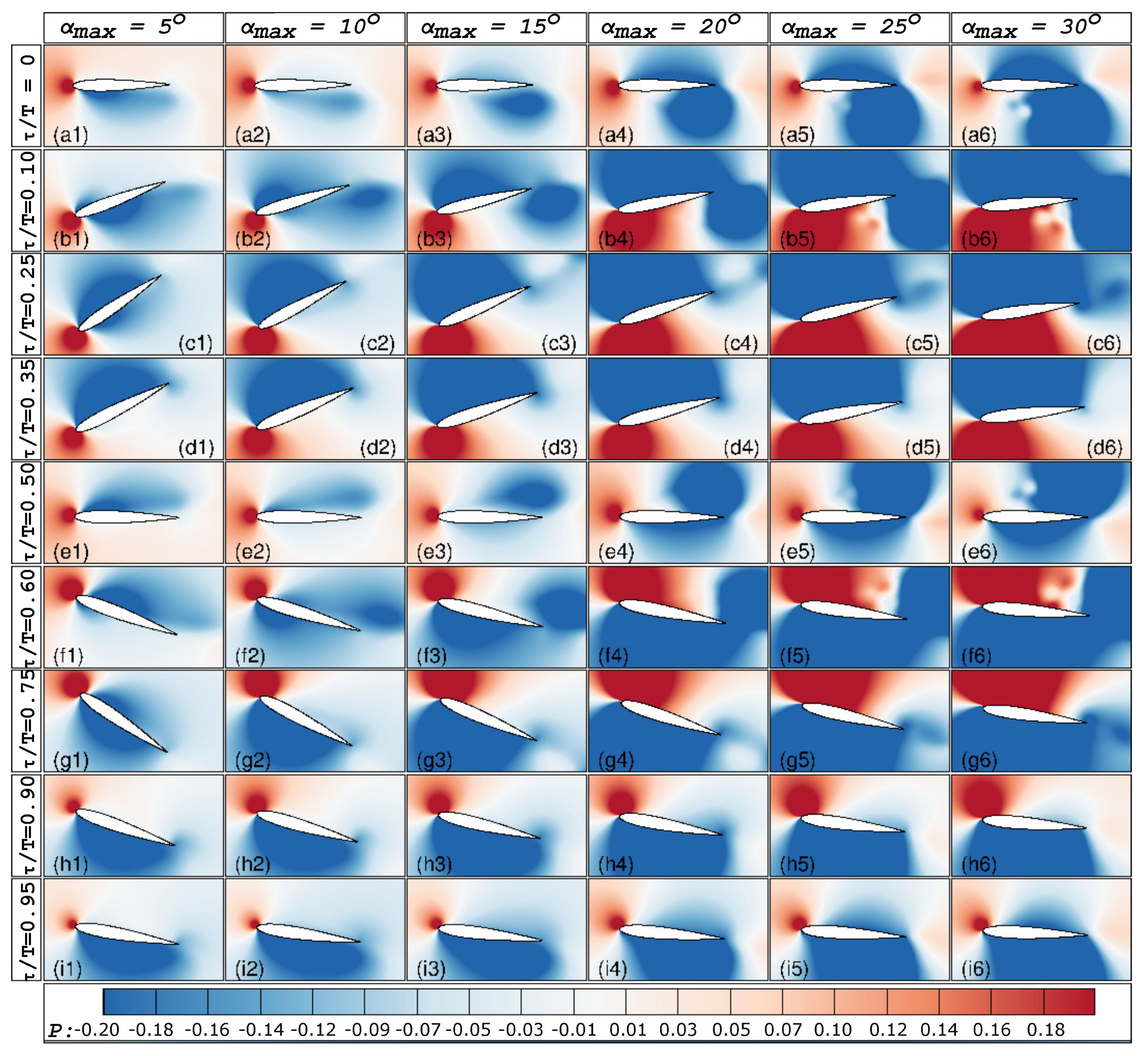
3.2. Flow Characteristics
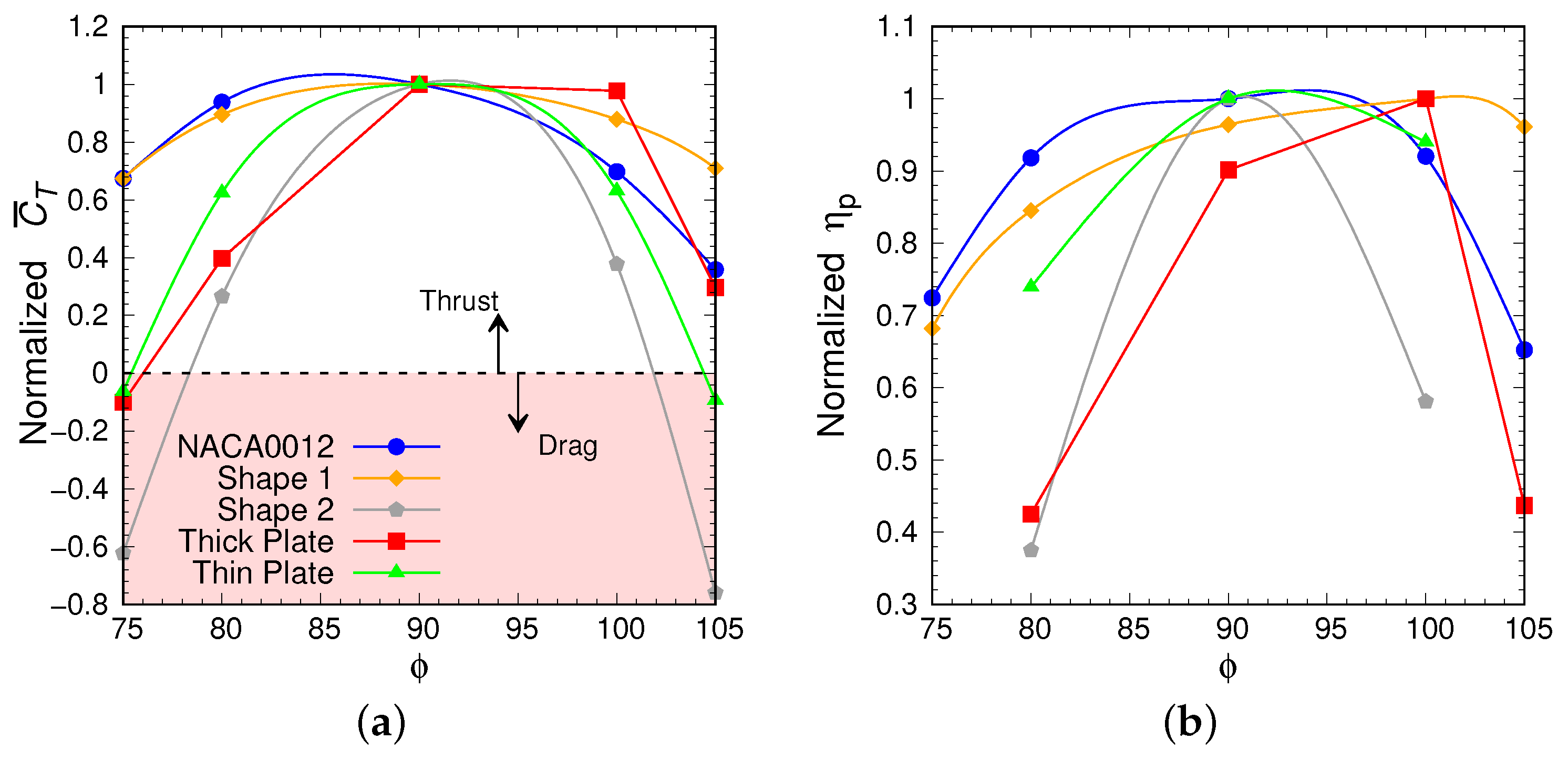
3.3. Effect of Phase Difference between Heave and Pitch on Hydrodynamic Performance
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbols | Definitions |
| C | Chord length |
| Lateral force coefficient | |
| Local lateral force coefficient per unit surface area of the hydrofoil | |
| Rms variation in the lift/lateral coefficient | |
| Input power coefficient | |
| Thrust coefficient | |
| f | Oscillation frequency |
| Net force acting in the lateral direction | |
| Net force acting in the normal direction | |
| Net force acting in the streamwise direction | |
| h | Heave amplitude |
| Maximum heave amplitude | |
| P | Non-dimensional pressure |
| Reynolds number | |
| Strouhal Number | |
| T | Non-dimensional time to complete one cycle of periodic oscillations. |
| t | Dimensional time |
| U | Non-dimensional velocity in streamwise direction |
| Non-dimensional velocity vector | |
| Local velocity component of the hydrofoil-shaped body in streamwise direction | |
| Heave velocity | |
| Vertical relative velocity | |
| Free stream velocity | |
| V | Non-dimensional velocity in lateral direction |
| Local velocity component of the hydrofoil-shaped body in lateral direction | |
| Lateral velocity | |
| X | Non-dimensional streamwise distance |
| x | Streamwise direction |
| Y | Non-dimensional lateral distance |
| y | Lateral direction |
| Angle of attack | |
| Maximum angle of attack | |
| Grid cell size in x,y directions, respectively | |
| Propulsive efficiency | |
| Pitching amplitude | |
| Maximum pitching amplitude | |
| Dynamic viscosity | |
| Fluid density | |
| Non-dimensional time | |
| Level set function | |
| Phase difference between heave and pitch | |
| Vorticity | |
| Acronyms | |
| CCW | Counter-clockwise |
| CW | Clockwise |
| LEV | Leading edge vortex |
| LS-IIM | Level-set function-based immersed interface method |
References
- Thekkethil, N.; Sharma, A. Level set function–based immersed interface method and benchmark solutions for fluid flexible-structure interaction. Int. J. Numer. Methods Fluids 2019, 91, 134–157. [Google Scholar] [CrossRef]
- Smits, A.J. Undulatory and oscillatory swimming. J. Fluid Mech. 2019, 874, 1. [Google Scholar] [CrossRef]
- Zdunich, P.; Bilyk, D.; MacMaster, M.; Loewen, D.; DeLaurier, J.; Kornbluh, R.; Low, T.; Stanford, S.; Holeman, D. Development and testing of the mentor flapping-wing micro air vehicle. J. Aircr. 2007, 44, 1701–1711. [Google Scholar] [CrossRef]
- Techet, A.H. Propulsive performance of biologically inspired flapping foils at high Reynolds numbers. J. Exp. Biol. 2008, 211, 274–279. [Google Scholar] [CrossRef] [PubMed]
- Du, R.; Li, Z.; Youcef-Toumi, K.; y Alvarado, P.V. Robot Fish: Bio-Inspired Fishlike Underwater Robots; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Kinsey, T.; Dumas, G. Parametric study of an oscillating airfoil in a power-extraction regime. AIAA J. 2008, 46, 1318–1330. [Google Scholar] [CrossRef]
- Kinsey, T.; Dumas, G.; Lalande, G.; Ruel, J.; Mehut, A.; Viarouge, P.; Lemay, J.; Jean, Y. Prototype testing of a hydrokinetic turbine based on oscillating hydrofoils. Renew. Energy 2011, 36, 1710–1718. [Google Scholar] [CrossRef]
- Zhu, Q. Optimal frequency for flow energy harvesting of a flapping foil. J. Fluid Mech. 2011, 675, 495–517. [Google Scholar] [CrossRef]
- Wang, Z.; Du, L.; Zhao, J.; Thompson, M.; Sun, X. Flow-induced vibrations of a pitching and plunging airfoil. J. Fluid Mech. 2020, 885, A36. [Google Scholar] [CrossRef]
- Triantafyllou, M.; Triantafyllou, G.; Gopalkrishnan, R. Wake mechanics for thrust generation in oscillating foils. Phys. Fluids A Fluid Dyn. 1991, 3, 2835–2837. [Google Scholar] [CrossRef]
- Triantafyllou, G.S.; Triantafyllou, M.; Grosenbaugh, M. Optimal thrust development in oscillating foils with application to fish propulsion. J. Fluids Struct. 1993, 7, 205–224. [Google Scholar] [CrossRef]
- Anderson, J.; Streitlien, K.; Barrett, D.; Triantafyllou, M. Oscillating foils of high propulsive efficiency. J. Fluid Mech. 1998, 360, 41–72. [Google Scholar] [CrossRef]
- Read, D.A.; Hover, F.; Triantafyllou, M. Forces on oscillating foils for propulsion and maneuvering. J. Fluids Struct. 2003, 17, 163–183. [Google Scholar] [CrossRef]
- Hover, F.; Haugsdal, Ø.; Triantafyllou, M. Effect of angle of attack profiles in flapping foil propulsion. J. Fluids Struct. 2004, 19, 37–47. [Google Scholar] [CrossRef]
- Van Buren, T.; Floryan, D.; Smits, A.J. Scaling and performance of simultaneously heaving and pitching foils. AIAA J. 2019, 57, 3666–3677. [Google Scholar] [CrossRef]
- Isogai, K.; Shinmoto, Y.; Watanabe, Y. Effects of dynamic stall on propulsive efficiency and thrust of flapping airfoil. AIAA J. 1999, 37, 1145–1151. [Google Scholar] [CrossRef]
- Ramamurti, R.; Sandberg, W. Simulation of flow about flapping airfoils using finite element incompressible flow solver. AIAA J. 2001, 39, 253–260. [Google Scholar] [CrossRef]
- Soueid, H.; Guglielmini, L.; Airiau, C.; Bottaro, A. Optimization of the motion of a flapping airfoil using sensitivity functions. Comput. Fluids 2009, 38, 861–874. [Google Scholar] [CrossRef]
- Tuncer, I.H.; Platzer, M.F. Computational study of flapping airfoil aerodynamics. J. Aircr. 2000, 37, 514–520. [Google Scholar] [CrossRef]
- Tuncer, I.H.; Kaya, M. Optimization of flapping airfoils for maximum thrust and propulsive efficiency. AIAA J. 2005, 43, 2329–2336. [Google Scholar] [CrossRef]
- Young, J.; Lai, J.C. Mechanisms influencing the efficiency of oscillating airfoil propulsion. AIAA J. 2007, 45, 1695–1702. [Google Scholar] [CrossRef]
- Guglielmini, L.; Blondeaux, P. Propulsive efficiency of oscillating foils. Eur. J. Mech. B/Fluids 2004, 23, 255–278. [Google Scholar] [CrossRef]
- Bose, C.; Sarkar, S. Investigating chaotic wake dynamics past a flapping airfoil and the role of vortex interactions behind the chaotic transition. Phys. Fluids 2018, 30, 047101. [Google Scholar] [CrossRef]
- Zhang, X.; Ni, S.; Wang, S.; He, G. Effects of geometric shape on the hydrodynamics of a self-propelled flapping foil. Phys. Fluids 2009, 21, 103302. [Google Scholar] [CrossRef]
- Ashraf, M.; Young, J.; Lai, J. Reynolds number, thickness and camber effects on flapping airfoil propulsion. J. Fluids Struct. 2011, 27, 145–160. [Google Scholar] [CrossRef]
- Müller, U.K.; Stamhuis, E.J.; Videler, J.J. Riding the waves: The role of the body wave in undulatory fish swimming. Integr. Comp. Biol. 2002, 42, 981–987. [Google Scholar] [CrossRef]
- Anderson, J.M. Vorticity Control for Efficient Propulsion; Technical Report; Massachusetts Institute of Technology: Cambridge, MA, USA, 1996. [Google Scholar]
- Verma, S.; Hemmati, A. Evolution of wake structures behind oscillating hydrofoils with combined heaving and pitching motion. J. Fluid Mech. 2021, 927, A23. [Google Scholar] [CrossRef]
- Zurman-Nasution, A.N.; Ganapathisubramani, B.; Weymouth, G.D. Fin sweep angle does not determine flapping propulsive performance. J. R. Soc. Interface 2021, 18, 20210174. [Google Scholar] [CrossRef] [PubMed]
- Zurman-Nasution, A.; Ganapathisubramani, B.; Weymouth, G. Influence of three-dimensionality on propulsive flapping. J. Fluid Mech. 2020, 886, A25. [Google Scholar] [CrossRef]
- Thekkethil, N. CFSD Development and Its Application for Hydrodynamic Analysis on Various Types of Fishes-Like Kinematics, Propulsion, and Flexibility of 2D and 3D NACA0012 Hydrofoils. Ph.D. Thesis, Indian Institute of Technology Bombay, Mumbai, India, 2019. [Google Scholar]
- Thekkethil, N.; Sharma, A.; Agrawal, A. Unified hydrodynamics study for various types of fishes-like undulating rigid hydrofoil in a free stream flow. Phys. Fluids 2018, 30, 077107. [Google Scholar] [CrossRef]
- Thekkethil, N.; Sharma, A.; Agrawal, A. Self-propulsion of fishes-like undulating hydrofoil: A unified kinematics based unsteady hydrodynamics study. J. Fluids Struct. 2020, 93, 102875. [Google Scholar] [CrossRef]
- Gupta, S.; Thekkethil, N.; Agrawal, A.; Hourigan, K.; Thompson, M.C.; Sharma, A. Body-caudal fin fish-inspired self-propulsion study on burst-and-coast and continuous swimming of a hydrofoil model. Phys. Fluids 2021, 33, 091905. [Google Scholar] [CrossRef]
- Gupta, S.; Sharma, A.; Agrawal, A.; Thompson, M.C.; Hourigan, K. Hydrodynamics of a fish-like body undulation mechanism: Scaling laws and regimes for vortex wake modes. Phys. Fluids 2021, 33, 101904. [Google Scholar] [CrossRef]
- Gupta, S.; Agrawal, A.; Hourigan, K.; Thompson, M.C.; Sharma, A. Anguilliform and carangiform fish-inspired hydrodynamic study for an undulating hydrofoil: Effect of shape and adaptive kinematics. Phys. Rev. Fluids 2022, 7, 094102. [Google Scholar] [CrossRef]
- Gupta, S.; Zhao, J.; Sharma, A.; Agrawal, A.; Hourigan, K.; Thompson, M.C. Two-and three-dimensional wake transitions of a NACA0012 airfoil. J. Fluid Mech. 2023, 954, A26. [Google Scholar] [CrossRef]
- Boiron, O.; Guivier-Curien, C.; Bertrand, E. Study of the hydrodynamic of a flapping foil at moderate angle of attack. Comput. Fluids 2012, 59, 117–124. [Google Scholar] [CrossRef]
- Sharma, A. Introduction to Computational Fluid Dynamics: Development, Application and Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gupta, S.; Sharma, A.; Agrawal, A.; Thompson, M.C.; Hourigan, K. Role of Shape and Kinematics in the Hydrodynamics of a Fish-like Oscillating Hydrofoil. J. Mar. Sci. Eng. 2023, 11, 1923. https://doi.org/10.3390/jmse11101923
Gupta S, Sharma A, Agrawal A, Thompson MC, Hourigan K. Role of Shape and Kinematics in the Hydrodynamics of a Fish-like Oscillating Hydrofoil. Journal of Marine Science and Engineering. 2023; 11(10):1923. https://doi.org/10.3390/jmse11101923
Chicago/Turabian StyleGupta, Siddharth, Atul Sharma, Amit Agrawal, Mark C. Thompson, and Kerry Hourigan. 2023. "Role of Shape and Kinematics in the Hydrodynamics of a Fish-like Oscillating Hydrofoil" Journal of Marine Science and Engineering 11, no. 10: 1923. https://doi.org/10.3390/jmse11101923
APA StyleGupta, S., Sharma, A., Agrawal, A., Thompson, M. C., & Hourigan, K. (2023). Role of Shape and Kinematics in the Hydrodynamics of a Fish-like Oscillating Hydrofoil. Journal of Marine Science and Engineering, 11(10), 1923. https://doi.org/10.3390/jmse11101923