3.1. Twin Ship Parallel Study
In this section, we describe the seakeeping analysis of two ships during vessel parallelism. Based on viscous fluid and theory, numerical simulations were carried out on the side-by-side motion of the scaled ship model (3 m long). To study the hydrodynamic motion response of the two vessels when the rescue vessel is alongside the rescued vessel, the motion of the two vessels is simulated numerically in two dimensions under the condition of regular beam seas. This section firstly simulates the influence of the wave height and the distance between the two ships on the ship motion under the condition of zero speed. Secondly, the influence of upstream ship approaching downstream ship at different speeds on ship motion is simulated. The entire 2D wave basin is 9 m long, 1 m high and 0.5 m deep, with the origin of the coordinates located at the bottom left of the numerical wave tank. The left side of the basin is set as the velocity inlet boundary condition [
18], which essentially gives the water quality point an initial position and velocity at which to generate the waves. The outlet boundary is set as a pressure outlet [
19] so that the pressure at the outlet is distributed according to a pressure gradient, so when the fluid flows at the outlet, it will automatically flow with the pressure, thus achieving wave dissipation. The two vessels are placed in the centre of the basin, and a cross-section of the middle of the hull is taken as the object of the simulation. The rest of the boundary conditions are set to the wall, which limits the motion of the two vessels in the
x-axis direction during the simulation. The two-dimensional numerical simulation mainly analyses the effects of wave height, wave period and the distance between the two vessels on the motion response of the two vessels and simulates the green sea phenomenon of the vessels. The two-dimensional flow field schematic is shown in
Figure 2.
To achieve greater accuracy while using fewer grids, a structured grid is used to delineate the entire flow field. To simulate the changes in the flow field mesh during ship motion, a nested dynamic mesh is used to simulate the movement of the mesh due to boundary movement during ship motion. The grid of the entire flow field is shown in
Figure 3a, with a denser grid near the wavefront to better simulate the wave interface. For the rest of the mesh, a larger size is used, thus reducing the overall mesh count and increasing the computational efficiency. For the mesh near the ship, the O-grid is used for fine investigation, which corresponds well to the surface of the ship. The mesh is denser near the free surface, as shown in
Figure 3b, while a finer fluid mesh is generated near the ship’s wall to satisfy the wall function. First, for waves, the fluid velocity around the ship is different. Moreover, for the dynamic mesh, as the ship is moving, the movement of the ship causes the flow velocity around the hull to be different. Furthermore, the initial conditions of the waves are changed in the setup of each calculation case, causing the wave velocity to change for each wave. All three of these factors cause a change in the velocity of the fluid around the ship, which leads to a change in the y+ value. This change, in turn, is related to the height of the first layer of the grid, which is essentially the allocation of the first layer of the grid to the region of strong turbulence. In dividing the grid, only the y+ value of the ship in the water is considered first, ensuring that the simulation is performed after a period of time when the twin ships reach a relatively steady state with a y+ value around the ship greater than 30. Here, the height of the first layer of the grid is arranged to be 0.001 m.
Figure 3c shows the overall appearance of the grid for the entire flow field at t = 0 s for the nested grid. In addition, we carried out the grid-independent verification of the grid.
Figure 4 is the result of the grid-independent calculation. There are 230,000 grids in grid 1 and 460,000 grids in grid 2. It can be seen that the increase in the number of grids has little effect on the results, so in the subsequent simulations, grid 1 is used in all of them to reduce the amount of calculation.
The two-dimensional numerical simulation can simulate only the movement of the ship in beam seas with a twin ship rolling and heaving.
Figure 5 shows the cloud diagram of the air and water terms for a twin ship in motions induced by beam seas.
Figure 6 shows the time record curve simulated by the heave and roll motions for a typical two-dimensional two-boat motion scenario, where the wave is regular; the wave height and length are 0.024 m and 2.4 m, respectively; and the distance between the two vessels is equal to the vessel width.
For a typical side-by-side twin ship motion, when the ship motion is stabilised, the twin ships mainly move periodically, but their motion amplitudes are not the same, showing strong non-linear characteristics. This is mainly because the ship motion both is affected by the wave forces and affects the waves (mainly between the ships) in turn. Here, the two vessels do not have any link, and only fluid flow interference occurs. Moreover, we divided the ship into an upstream ship (ship on the left side of the flow field) and a downstream ship (ship on the right side of the flow field) according to the direction of wave transfer. After stabilisation, the downstream vessel has higher amplitude of heave motion than the downstream vessel, but the opposite is true for the roll, where the downstream vessel has a lower amplitude of roll than the upstream vessel due to the masking effect of the latter.
To investigate the effect of external environmental conditions on the motion of a ship in the approaching process, the effect of wave height on ship motion is analyzed under the condition of zero speed, beam seas, a wavelength of 2.4 m, and the distance between two ships is the width of the ship. Specifically, the motion response of the ship under the action of 0.024–0.132 m wave height (corresponding to the relative sea state level of 2–6) is simulated. The numerical simulation of the model ship is carried out below under the conditions of beam seas and a wave length of 2.4 m and one time the ship’s width. Using Fourier transformation (Equation (8)), the results in the time domain are converted to the frequency domain to obtain the motion amplitude of the ship’s motion, as shown in
Figure 7. When comparing the motion response of the upstream and downstream vessels, consistent with the results in the time domain, the upstream vessel’s heave motion amplitude is found to be smaller than that of the downstream vessel, while the roll motion amplitude is larger than that of the upstream vessel. The amplitudes of both the heave motion curve and the roll motion curve increase with the wave height, indicating a positive correlation between the motion of the two vessels and the wave height.
Comparing the growth rates of the two curves, as the wave amplitude increases, the upstream vessel’s roll motion increases at a faster rate than that of the downstream vessel. At the same time, the opposite is true for the heave motion of the upstream ship. The increase in wave amplitude increases not only the motion of both vessels but also the difference in motion amplitude between the two vessels, with the larger average amplitude becoming more violent with increasing wave amplitude.
The effect of wave height on the two ships alongside each other is taken into account, along with the effect of the green sea phenomenon. The green sea phenomenon refers to a situation where a wave crosses the deck of a ship and stays on the deck, exerting additional forces on the ship. There are many factors that can cause the green sea phenomenon on a ship. In this investigation, the wave amplitude is increased so that the green sea phenomenon condition is achieved without the ship overturning. The wave amplitude is set to correspond to a category 6 wave condition, and the results are shown in
Figure 8. For the upstream vessel, the wave crosses the port side of the upstream vessel and flows over the upper vessel deck. For the downstream vessel, the fluid slams against the port side of the downstream vessel, thus spraying the upper vessel. As the wave height increases, the amplitude of the ship’s motion also increases significantly.
The time record curve simulated by oscillations during the green sea phenomenon is shown in
Figure 9. The amplitude of the ship’s movement increases significantly, with the maximum roll motion amplitude even reaching 50°, presenting a considerable threat to both the ship itself and the ship’s personnel and cargo equipment. The green sea phenomenon of the deck causes a certain amount of oscillation in the ship’s motion. During the green sea phenomenon of the downstream ship, the water adheres to the upper surface of the ship under the action of gravity, increasing the total mass of the ship, thus making the ship’s green sea phenomenon amplitude instantaneously smaller and its vertical motion curve appear oscillating. Both ships oscillate more obviously at the bottom of the wave, which means that both ships are more likely to be on the wave when they are at the bottom of the wave. The fluid briefly stays on the surface of the ship, which also causes the ship to be subjected to additional external moments. The ship’s roll motion also generates more obvious oscillations, as the ship’s motion causes the fluid to flow on board, resulting in a coupled motion between the ship and the fluid. For the downstream vessel, the wave is less upwards due to the shading effect of the upstream vessel, and the external force is mainly due to the external moment generated by the fluid slamming, so the ships’ oscillations have smaller amplitudes.
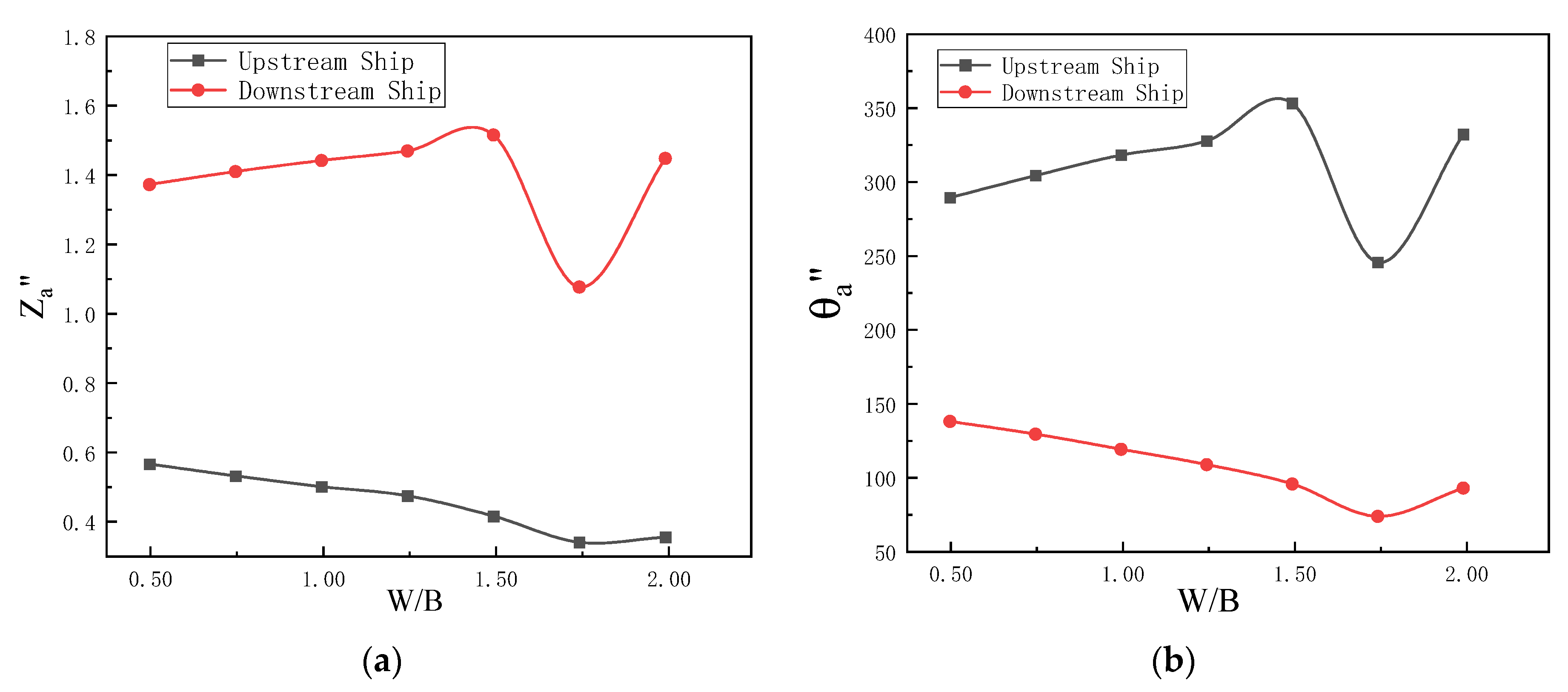
For salvage, the relative positions of the ships must be considered during the salvage process. If the distance is too small, collisions will occur between the vessels; however, if the distance is too large, the distance between the rescue vessel and the rescued vessel will be too large, resulting in normal rescue work not being carried out. The movement of the twin vessels at different distances is simulated, and the results are shown in
Figure 10, where W/B is the ratio of the distance between the twin vessels to the vessel’s width. The numerical simulation of the model ship is carried out below under the conditions of zero speed, beam seas, wave length of 2.4 m and wave height of 0.024 m. To eliminate the effect of scale, the data are non-dimensionalised, and the main treatment is as follows:
where
A represents the wave amplitude,
k is the wave number and
is the wave length.
When W/B < 1.5, as the distance between the twin ships increases, the amplitudes of the ships both move towards the two extremes—the original small amplitude decreases, and the amplitude of the motion of the twin ships scales linearly with the distance between the ships. However, for a distance of W/B > 1.5 between the two ships, the motion trend of the two ships changes; thus, W/B = 1.5 is the critical distance for the two ships to influence each other.
In the actual rescue process, the rescue vessel needs to approach the rescued vessel through its own motion. In this work, a lateral force is applied to the upstream vessel so that the vessel gains a velocity under the external force, which is used to simulate the process of the propeller pushing the vessel.
Figure 11 shows a cloud of a two-dimensional ship model berthing with a velocity of Fr = 0.2 as a function of time. In practice, however, the relationship between how much force the ship needs to be propelled and the velocity between the force and the ship must be tested several times. The resulting relationship between force and ship velocity is shown in
Figure 12, where the ship velocity is expressed in terms of the Froude number Fr, which is given by
where
v is the velocity of the ship. Again, the drag force is dimensionless. In
Figure 12, due to the two-dimensional case, d denotes the ship’s height. There is basically a power function relationship between the velocity of the ship’s motion and the ship’s towing force.
The numerical simulation of the model ship was carried out under the conditions of beam seas, wave length of 2.4 m and wave height of 0.024 m.
Figure 13 and
Figure 14 show the motion response of the two vessels during the merging process and for a period of time after docking. After the upstream vessel has stopped, the RAO of the motion of the two vessels is essentially the same. The larger RAO is still at the lower velocity of the moving vessel.
3.2. Two-Ship Towing Study
In this section, we detail the seakeeping analysis of two ships during the towing process. Based on the three-dimensional potential flow theory, numerical simulations were carried out on the towing motion of the full-scale ship (116.95 m long). This section firstly simulates the appropriate wave direction for towing motion under the action of irregular waves (JONSWAP Spectrum). Secondly, under this wave direction, the influence of wave height and towing speed on the motion of the two boats is simulated. Before the simulation calculation, the external factors of the flow field need to be set first, including water depth and gravitational acceleration. Then, parameters such as hull weight, centre of gravity height and hull moment of inertia are modified. The ship model grid is shown in
Figure 15. The grid has a total of 12,268 nodes and 12,000 cells.
To investigate the effect of different environmental conditions on the twin vessels, we first analysed the effect of different wave directions on the vessel motion by varying the wave direction. The sailing conditions of the twin boats at different wave depths are shown in
Table 2, where the cable length is 1.5 times the sum of the lengths of the front and back ships.
The yaw poles of the twin boats for different wave directions were first obtained, as shown in
Figure 16. Due to the action of the cable, the difference in yaw poles between the two boats is not very large when sailing in most wave directions, with the yaw poles of the front boat being slightly larger than those of the rear boat. The yaw poles of the two boats are smaller in the following and head seas and larger in the oblique than in the beam seas, with the yaw poles reaching their maximum in the bow quartering seas, which is approximately twice as high as in the beam seas.
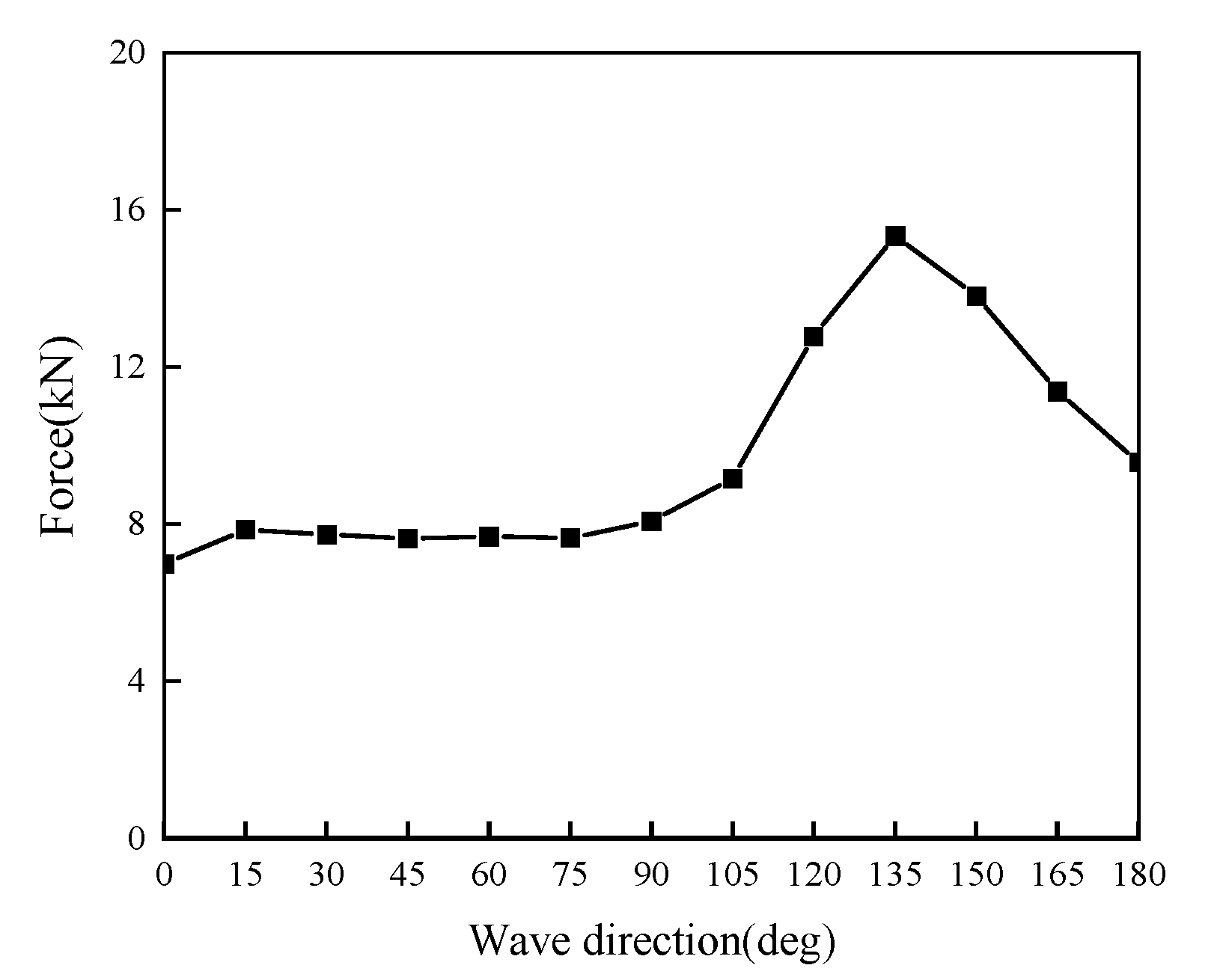
By calculating the roll, pitch and towing force response of the twin boats in different wave directions and averaging the absolute values of the data obtained, the curves of the average of the three degrees of freedom and the average of the towing force of the twin boats with wave direction can be obtained, as shown in
Figure 17 and
Figure 18.
It can be concluded from the observation curves that in the head seas condition, the twin boats have better heading stability and the three-degree-of-freedom response is smaller compared to other wave directions. In the wave direction range of 45°–135°, the stability of the twin boats is poor, with the bow and stern quartering seas having the greatest influence on the twin boats, and the average value of the roll and pitch the twin boats reaching the maximum. In the case of waves less than 90°, the loss of the front boat’s sheltering effect on the back boat results in the back boat’s pitch response being greater than that of the front boat, which is quite dangerous in the actual towing process, as the back boat is in a non-powered mode in most cases and cannot react quickly to changes in external conditions. When the wave direction is less than 90°, the towing force remains stable at approximately 8000 N and increases rapidly when the wave direction is greater than 90°, reaching a maximum value at 135°, after which the towing force gradually decreases. In summary, towing operations in rough sea conditions should be carried out in head seas as much as possible.
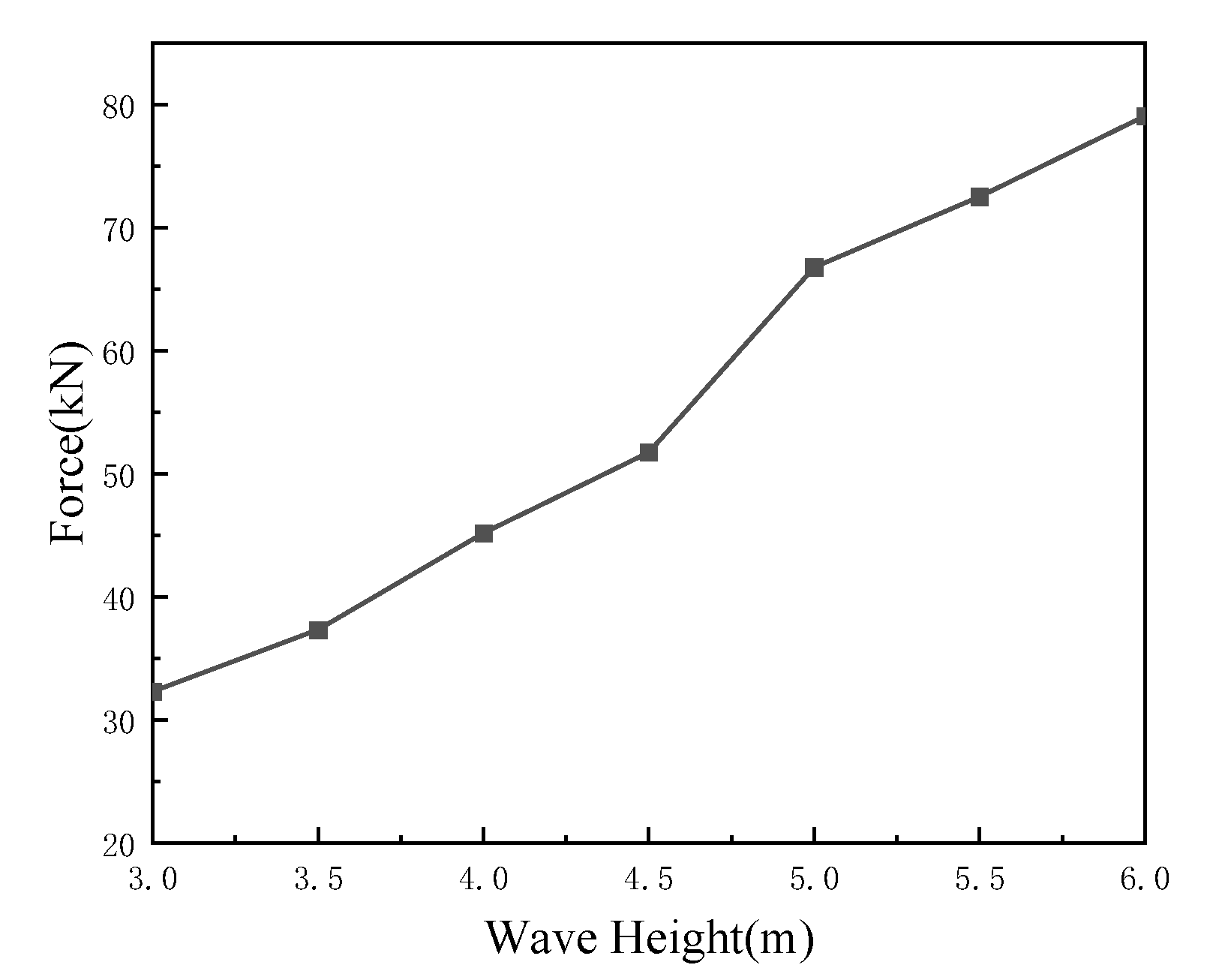
Therefore, according to the above conclusions, the numerical simulation is carried out under the conditions of head seas. For the external environment, in addition to the wave direction, the wave height also has an impact on the movement of the twin vessels. The effect of wave height on the motion of the two vessels is analysed here, and the motion response of the vessels is simulated for wave heights of 3–6 m (sea state 5–6). Other environmental conditions for the effect of wave height on the twin vessels are shown in
Table 3.
The results of the numerical analysis of the freedom and the drag force were processed. The results are shown in
Figure 19 and
Figure 20.
It can be concluded from the observation curve that during the towing process against the waves, as the wave height increases, the average value of the roll of the two boats generally tends to increase, and the increase in the front boat is greater than that in the back boat. The average value of roll response at a wave height of 6 m is approximately 3–4 times higher than that at a wave height of 3 m. The four-degree-of-freedom response of the front boat is smoother than that of the back boat because the wave acts directly on the front boat and the front boat shades the back boat; therefore, the pitch curve of the front boat is more linear than that of the back boat. As the wave height increases, the towing force also increases, and the overall upward trend is consistent. In summary, when carrying out towing operations, we should try to choose sea conditions with lower wave heights for towing.
In addition to considering the impact of the external environment on the twin boats, it is also necessary to consider the factors of the twin boats themselves. The consideration is the towing velocity. We investigated the effect of a towing velocity of 1–7 m/s (corresponding to 0.5–3.5 knot velocity) on the twin vessels, and the remaining conditions are shown in
Table 4.
Simulation calculations can result in the average value of the freedom as a function of velocity, as shown in
Figure 21, and the average value of the towing force as a function of velocity, as shown in
Figure 22.
By observing the curves, it can be concluded that during the towing process, the front boat has a certain shading effect on the rear boat, and the most obvious shading effect is the pitch curve. The average values of the pitch motion of the front boat and the rear boat differ greatly. The response of the roll and yaw motion of the two boats is not much different, but the roll and yaw of the front boat is always slightly larger than that of the rear boat. During the towing process, as the towing velocity increases, the four-degree-of-freedom response of the two vessels tends to generally rise, and as the velocity increases, the towing force on the towing cable also increases gradually and at an increasing rate. At a velocity of 1 m/s, the roll and yaw response of the two vessels is the largest. This is probably because the self-weight of the cable has a significant influence on the two vessels at low velocity, which leads to more severe ship rocking and thus affects the yaw response of the vessels, causing more serious yawing to occur. With increasing towing velocity, the average value of the towing force also increases, and with increasing velocity, the towing force is increasingly faster. At a velocity of 7 m/s, the average value of the towing force is approximately 3.5 times that at a velocity of 1 m/s. The average towing force at a speed of 7 m/s is approximately 3.5 times that at a speed of 1 m/s. Therefore, the speed range to be selected for a wave height of 3 m is 3–5 m/s.
3.3. Basin Test
Scaled-down ship model experiments are considered to be a reliable means of verification during ship simulation calculations. Many scholars have studied both real-scale and scaled-down ship models in many directions, such as kinematics and dynamics [
20,
21,
22]. Although the scaled-down model of a ship may differ slightly from the actual values under certain conditions, in general, the experimental results of the scaled-down model are similar to the actual values and reflect the real situation of the ship relatively well.
The experiment was carried out in a basin with spherical wave-maker device. Regular waves are generated by the oscillation of a single wave ball, and irregular waves are generated by the combined motion of two wave balls. As shown in
Figure 23, the wave basin is 50 m long, 30 m wide and 5 m deep, with a deep water area in the centre of the basin at a depth of 10 m, which is usually used to simulate deep water sea conditions. The ball wave basin is equipped with two symmetrically arranged wave balls on one side, which create waves through the up and down movement of the balls. The basic principle is that the motor pulls the elastic rope at the bottom of the wave ball to drive the ball in the vertical direction of movement. The movement of the ball causes the fluid around the ball to move, resulting in waves. The reflection of the basin wall and the superposition of the two wave spheres produces irregular waves similar to the actual marine environment. The instrument for measuring wave height measures the height of the water surface through the reflection of sound waves and then measures the real-time value of the wave. Taking the experiment of the twin vessel alongside test as an example, the twin vessel is arranged in the centre of the pool to reduce the influence of wall reflection on waves. The instrument for measuring wave height is located at the midpoint of the line connecting the centre of the wave-maker device and the ship’s centre.
The principle of instruments for measuring wave height is through the reflection of sound waves. The wave values are collected from the sound wave data reflected from the water surface. Take the data of measuring the approaching process of two boats as an example. The schematic diagram of the experimental site is shown in
Figure 24. The blue dot in the picture represents the wave ball, and the yellow Pentagram represents the instrument that measures the wave height. A single wave-making ball moves up and down to generate waves, and the angle at which the waves hit the boats is controlled by pulling on a lightweight cable. The center of gravity of the two boats is about 10 m from the horizontal distance of the wave ball. A wave height measuring instrument is suspended at 5 m horizontally from the wave-making ball and 1.5 m from the water surface to measure the wave conditions around the ship. Other distances between the two boats and the wave ball can also be set, so the wave height data of more intervals around the boat can be measured. In addition, two wave-making balls move up and down to generate waves and then carry out the towing experiment of two boats, and the experimental principle is similar to the approaching process of two boats.
The ship model used for the test was a 3 m long scaled-down model, as shown in
Figure 25, with the specific parameters shown in
Table 5. There is a 5 mm thick acrylic plate at the level of the centre of gravity to hold the attitude metre, sensors, counterweights and other equipment.
After the model is built, counterweights are placed inside the model to achieve its design weight, and the moment of inertia is adjusted by adjusting the position of the counterweights using a rotating inertia frame. The rotating inertia frame is shown in
Figure 26. The upper part of the rotating inertia frame has two brackets, which are connected to the rotating inertia frame by pressure sensors to measure and control the position of the model’s centre of gravity. The lower part of the rotating inertia frame is the oscillating platform. The ratio of the difference between the oscillating period of the platform without the model and the oscillating period with the model and the height and weight of the ship is calculated to be equal to the rotating inertia of the model in the measurement direction. Furthermore, the oscillation DOF natural period for vessel scaled model is 0.212 s.
After completing the loading and levelling of the moulds, the moulds are lifted into the water via the overhead crane, and the twin vessels are tested alongside each other and towed separately.
3.3.1. Twin Vessel Alongside Test
The wave created by the wave sphere is a circular wave, which moves around the sphere and is superimposed by reflections when it meets the wall, forming an irregular wave with a random distribution of amplitude, but the wave period is the same as the movement frequency of the spheric wave-maker device and therefore remains basically the same. There are four wave patterns in the basin, and the actual wave conditions can be measured using a wave height meter. The four modes correspond to four different wave amplitudes, which are shown in
Table 6.
According to the Froude number comparison, the four wave patterns have amplitudes of approximately 3 m, 3.5 m, 4 m and 5.5 m, respectively.
During the alongside test, the ship’s position is regulated by means of a lightweight rope, which allows the ship to be positioned in such a way that the relative position of the two ships is maintained and the relative angle between the ship and the wave sphere is ensured. After the vessel has reached its designated position, the rope is released. The amplitude of the ship’s motion in beam seas is measured for modes a, b and c. In d-mode, the twin boats produce the green sea phenomenon due to the high value of the wave height. As shown in
Figure 27, when the twin boats are on the wave, it is mainly the bow that is on the wave; the degree of green sea phenomenon is small, and the water goes over the tip of the boat only. At this point, the middle and front of the twin boats are located in the trough of the wave, while the stern of the model is at the crest of the wave. The twin boats show a forward leaning posture, resulting in a lower relative position of the bow of the ship, and the water does not go over the bow, resulting in the green sea phenomenon of the bow of the ship. In addition, the ship’s roll motion is huge when the experiment in d-mode is performed, and the ship’s motion is also very unstable, resulting in inaccurate test data. Therefore, the ship’s motion response in d-mode was not tested to make the experiment safe and ensure the experimental data’s accuracy. In addition, the ship moves so violently in d-mode that it almost capsizes, as shown in
Figure 28.
The following is a comparative analysis of the experiment and data simulation for different wave heights and distances between the two ships. Firstly, the response of the two ships under different wave heights is analysed. We take the ratio of wave height (H) to the total height of ship (d) as abscissa. The three points on each curve correspond to the heave and roll motions in modes a, b and c.
Figure 29 shows the variation in the heave and roll amplitudes with the ratio of wave height (H) to the total ship height (d). It can be seen that the roll growth rate of the upstream ship is larger than that of the downstream ship, and the heave of the upstream ship is the opposite, which is consistent with the simulation. It can be seen that the values of heave and roll measured in the experiment are smaller than those in the numerical simulation. This is because the numerical simulation is carried out in the case of beam seas, but we cannot completely guarantee that the wave angle is 90° when conducting experiments. If the angle is greater or less than 90°, both the heave and the roll will be smaller.
Secondly, the response of the double boats at different distances is analysed.
Figure 30 shows the variation in the heave and roll RAO of the two ships under different W/B values. It can be seen that the critical value for the apparent change in the moving trend of the two boats in the experimental curve is W/B equal to about 1.5, which is consistent with the conclusion of the numerical simulation. In general, the RAOs of the heave and roll measured experimentally are smaller than the RAOs of the numerical simulations because we cannot fully guarantee that the experiments are performed under beam seas.
3.3.2. Two-Ship Towing Test
The scaled-down model tests were mainly carried out for towing at different velocities and different wave heights.
The response of the towing system at different velocities is first analysed. According to the Froude number proposed in
Section 3.1, when the model is reduced by a factor of
, its motion speed must be reduced by a factor of
simultaneously. From this, it can be calculated that when the speed of the 116.95 m long ship is 1–7 m/s, the movement speed of the 3 m model is 0.16–1.122 m/s. In addition, the experiment selects the same 3 m wave height as in the simulation, which corresponds to mode a. The wave height generated by mode a is 0.0775 m, the wave period is 2.3116 s and the same head seas condition is used in the simulation.
Figure 31 shows the experimental and numerical simulations of different speeds of roll, pitch and yaw. It can be seen that the front boat’s roll and pitch are more significant than those of the rear ship, mainly because the front boat has a specific shading effect on the rear ship, which is consistent with the conclusion drawn from the numerical simulation. Secondly, the roll and pitch measured in the experiment are more significant than the values in the numerical simulation. This may be because the tensile force generated by the motor used in the experiment fluctuates. Under the influence of the waves, the cable is sometimes tight and sometimes loose, which causes the front ship to have additional sway with the rear boat. This power cable significantly limits the yaw motion of the towing system, and the limitation of the length of the towing basin leads to a short towing time and a less significant yaw response.
Figure 32 shows the drag force test results at different speeds. The simulation results of the drag force at different velocities obtained in
Section 3.2 are compared with the experimental results of the drag force obtained in this section by non-dimensional analysis and dividing by the maximum value of the drag force at different velocities, and the velocity value obtained by Froude number scaling was used as the horizontal coordinate to obtain the comparison curve between the simulation and the experimental results, as shown in
Figure 33. The results of the simulation and the test are in agreement, which verifies the accuracy of the simulation results. In addition, the ratio of the experimentally measured towing force to the maximum supporting force is generally smaller than the numerical simulation value, which may be because the force provided by the experimental motor is unstable, so the tension sensor cannot always measure the normal value. However, the simulated ship is subject to constant tension at all times, so the ratio measured by the experiment is relatively small.
The towing test is then carried out with different wave heights; a, b and c wave modes were selected, corresponding to the simulated righteous wave heights of 3 m, 3.5 m and 4 m, and the towing velocity was selected as 0.801 m/s, corresponding to the simulated velocity of 5 m/s. The results of the roll, pitch and yaw are shown in
Figure 34. The drag force results are shown in
Figure 35. A comparison of simulated and experimental data by dividing the drag force by the maximum value at different wave heights is shown in
Figure 36.
Comparing the test results with the simulation results in
Section 3.2 reveals that the shading effect of the towing vessel on the towed vessel is most evident when conducting the towing tests at different wave heights. Whether it is an experiment or a numerical simulation, the roll and pitch of the front ship are larger than those of the back ship. As with the velocity comparison experiments, the yaw value of the towing system is smaller due to the limitations of the power cable and the towing site. As the wave height increases, the towing force of the towing system also increases. Similar to the simulation results, the average value of the towing force when H/d is 0.4 is approximately 1.7 times the average value when H/d is 0.25.





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}