1. Introduction
A catamaran offers good transverse stability and increased payload capacity while operating at high speeds. Studies of the hydrodynamic factors governing the resistance and seakeeping properties of a catamaran are therefore of interest. For operation in shallow waters, there is interest in understanding the impact of the interaction between the hull and the seabed on the total resistance, trim, and sinkage that affect the catamaran’s maneuvering capabilities. Conventional ships monitor the water depth when in shallow waters for safe navigation, avoiding grounding and squatting. The flow past a catamaran in motion in calm water is characterized by the boundary layer, wake, and transverse and divergent wave patterns associated with each demihull, and the interference between them. For a catamaran of length
moving at speed
U in water of depth
h, the flow is typically parameterized in terms of a vehicle length-based Froude number, (
), a depth-based Froude number (
) and Reynolds number
; here
g is gravitational acceleration. In shallow water, for (
), resistance, trim and sinkage of the catamaran are significantly amplified [
1]. The value
is therefore referred to as the critical Froude number.
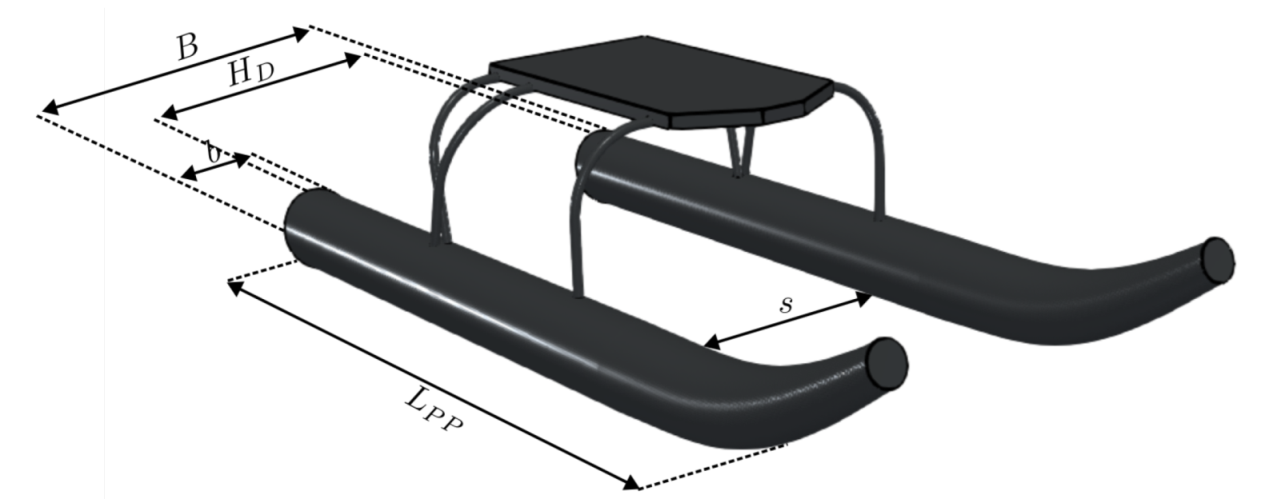
Several experimental studies have considered the dependence of the resistance and dynamic motion of catamarans in calm water on hull geometry, demihull beam-to-length ratio
, demihull beam-to-draft ratio
, hull separation-to-length ratio
, and length and depth-based Froude numbers
, and
. Insel and Molland [
2] investigated the deep-water motion of a series of high-speed catamarans for several values of
and
. Viscous and wave-making contributions of resistance were determined for a range of
, both observed to depend principally on
and the extent of the flow separation. In general, the interference between the hulls led to increase in the total resistance coefficient
, particularly over the critical and super critical range of
. Similar results were obtained by other notable deep-water investigations, including [
3,
4,
5,
6]. van’t Veer [
3] and Broglia et al. [
6] respectively investigated the seakeeping and resistance performances of Delft 372 catamaran, which has been widely used for benchmark purposes, for various hull separation ratios
over a range of
. Interference effects on the resistance were observed for
, reaching maximum at
. Strong correlation between interference resistance and trim and sinkage of the catamaran was noted. Souto-Iglesias et al. [
4] investigated the wave field between the demihulls and its effect on the interference resistance. Subsequently, Souto-Iglesias et al. [
5] investigated the interference effects of fixed and free models of a Series 60 catamaran, finding that the free or fixed model conditions did not affect the interference substantially.
Molland et al. [
7,
8] extended the deep-water experimental investigation reported in [
2] to shallow water. They observed a distinct increase in the resistance coefficient
in the subcritical to critical depth Froude Number, the increase being larger for the smaller of the two water depths considered, suggesting that the proximity of the seabed adversely affects the total resistance. Lee et al. [
9] experimentally investigated the hydrodynamic performance of a CATA IV catamaran for a range of values of
in deep and shallow waters. Consistent with [
7,
8], they observed that the measured resistance in shallow water exceeded that in deep water in the sub-critical to critical
range but was lower than in deep water for supercritical values of
. The effects were accentuated as
was reduced. Zlatev et al. [
10] conducted additional experiments with the Delft 372 catamaran model in shallow waters, the results of which are consistent with these findings. Similar results were reported by Dand et al. [
11] in their investigation of a catamaran sailboat. Subsequently, Falchi et al. [
12] investigated the dynamics of the vortices generated by the Delft 372 catamaran and their interactions with the wave patterns using stereo-PIV measurements.
Linear, slender hull and potential flow based theory [
13,
14,
15] provides good predictions of the characteristics of the non-viscous contributions to resistance and wave distribution. It serves as a useful design tool in early stage of the design process in exploring appropriate combinations of hull parameters and hull spacing. To capture the viscous contributions, consideration of the full Navier Stokes equations is needed. Several computational fluid dynamic (CFD) studies of the catamaran motion in deep water have been carried out via commercial and open-source solvers based on unsteady Reynolds averaged Navier Stokes (URANS) equations. Notable studies include those by Zaghi et al. [
16], Broglia et al. [
17], and He et al. [
18], all of whom studied the hydrodynamics of the Delft 372 catamaran model, Haase et al. [
19] who considered a large-medium speed catamaran, and Farkas et al. [
20] who studied the hydrodynamics of a series 60 catamaran. Consistent with experimental results and potential flow theory, these investigations find that in deep water the total resistance coefficient
of a catamaran as a function of
typically exhibits two peaks, with the second peak at a higher value of
being larger than the first. Zaghi et al. [
16] coupled experimental results with a CFD analysis of the flow field around the catamaran and showed that the two peaks occur when a wave trough is at the stern. The second peak was found to be associated with strong interference effects that increase as
is reduced. Broglia et al. [
17] applied URANS approach to examine the interference effects on the surface of the Delft 372 catamaran in terms of the distribution of streamlines, cross flows, pressure and wave patterns. The computations suggested minimal influence of the Reynolds number
on the interference effects. Haase et al. [
19] developed a novel method for predicting full-scale resistance of a large-medium speed catamaran that is based on verification using model scale experiments and including surface roughness effects. Farkas et al. [
20] conducted numerical simulations of the Series 60 catamaran model and investigated the wave and viscous components of hull interference. The results suggested that the form factor was effectively independent of
but depended on the hull separation distance
.
Notable fully viscous CFD studies of catamaran hydrodynamics in shallow water include those by Castiglione et al. [
21] (See also [
22]), and by Shi et al. [
23]. Castiglione et al. [
21] used URANS code CFDSHIP-Iowa V.4 and Shi et al. [
23] used the commercial URANS code Star CCM+ 14.06 in their studies. In [
21], the Delft 372 catamaran was considered and the results for resistance, trim and sinkage were shown to be in good agreement with experimental results reported in [
3], and [
10]. A number of subsequent papers relating to various aspects of the hydrodynamic of Delft 372 catamaran have been published and are comprehensively documented by Broglia et al. [
24]. Shi et al. [
23] computed the resistance of a full-scale zero-emission catamaran in both deep and shallow waters and demonstrated that the overall characteristics of the total drag coefficient for the vehicle were consistent with those determined experimentally for similar catamarans.
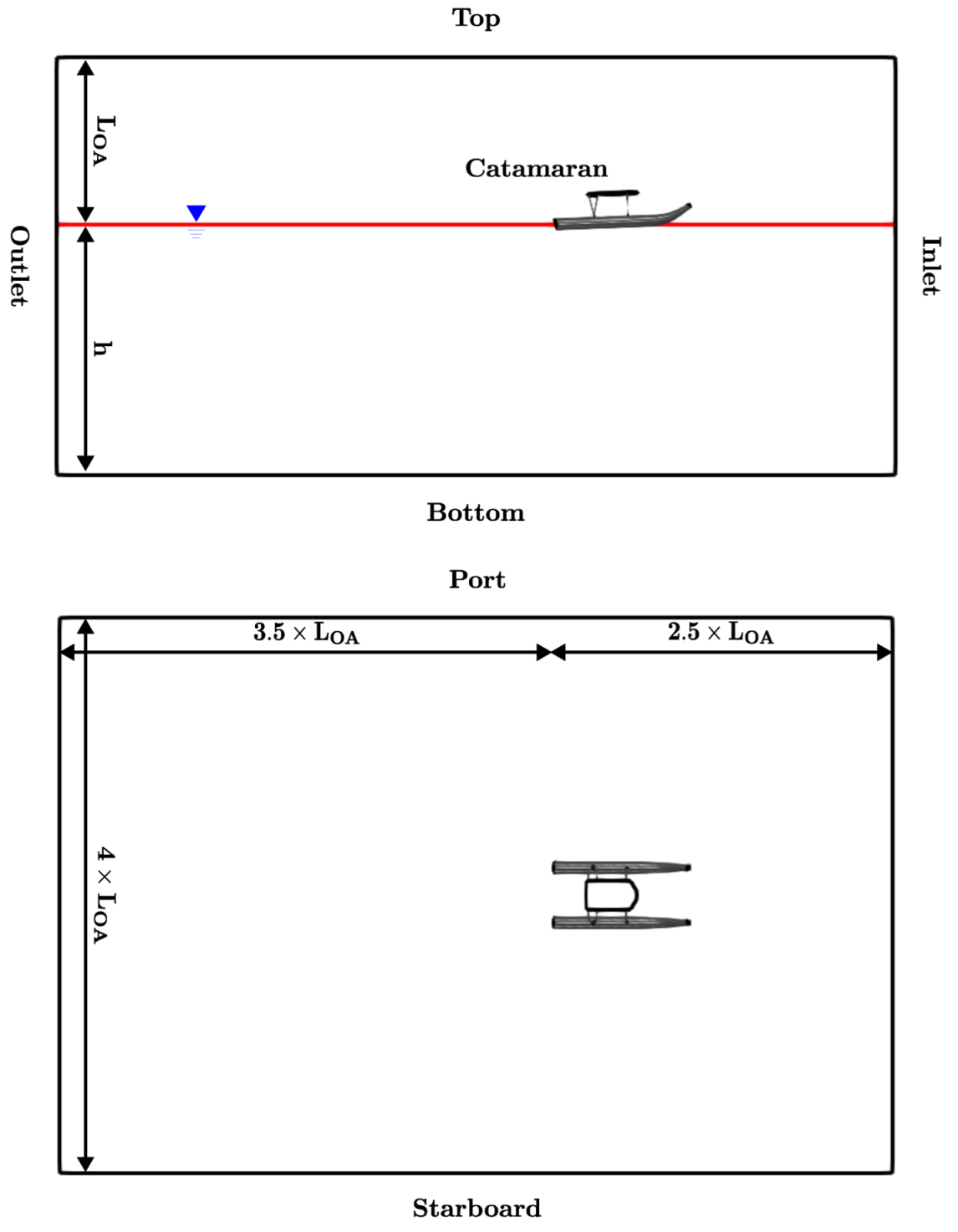
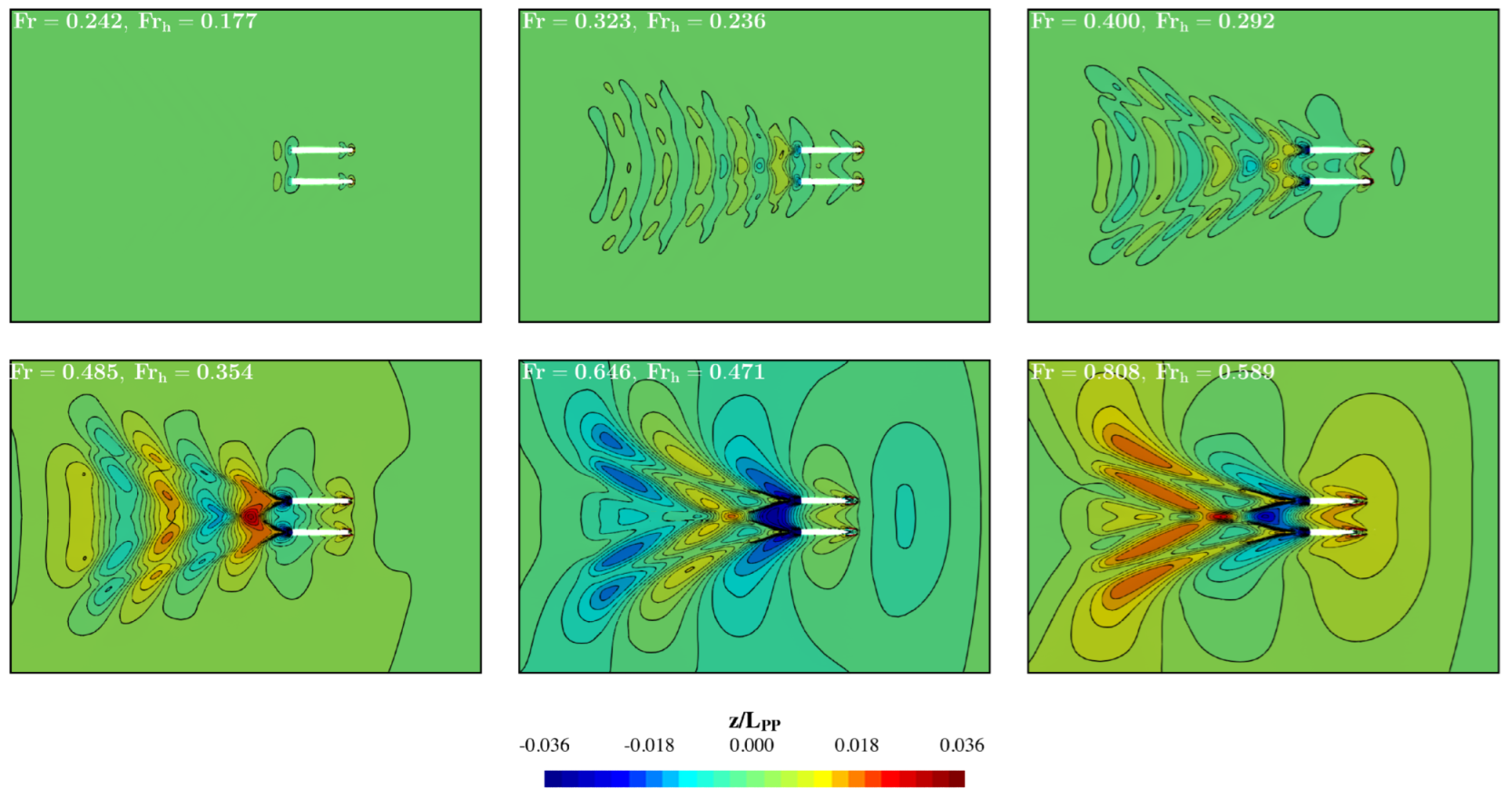
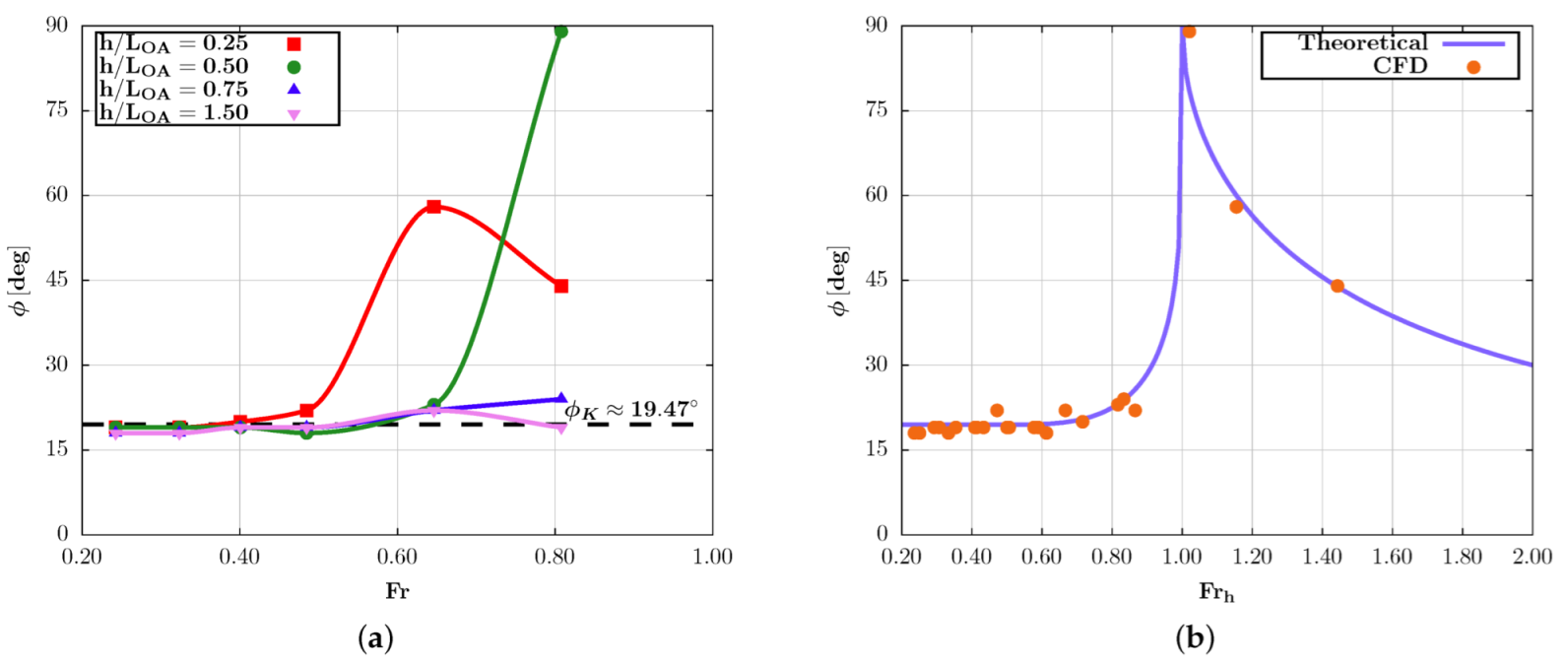
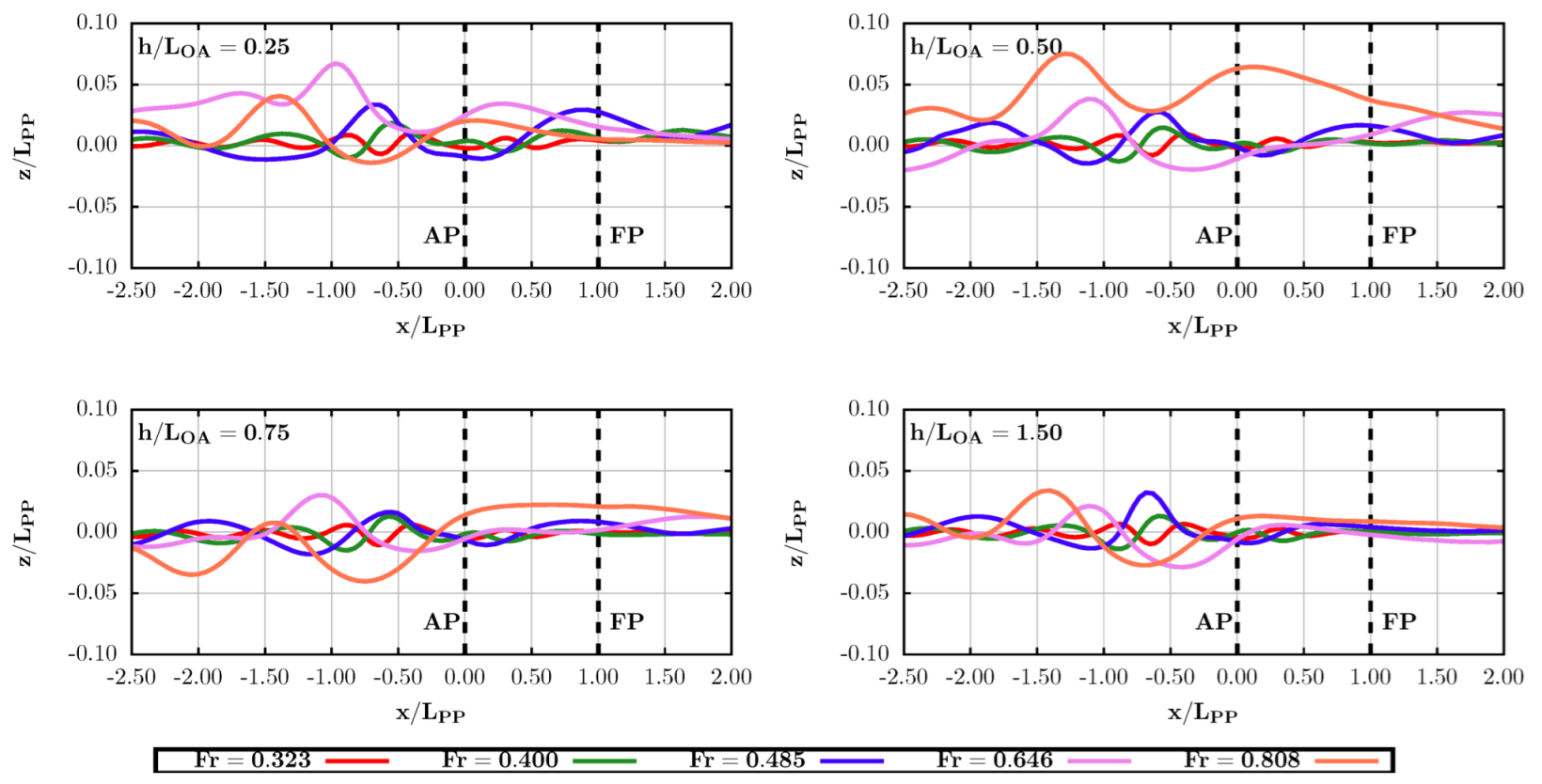
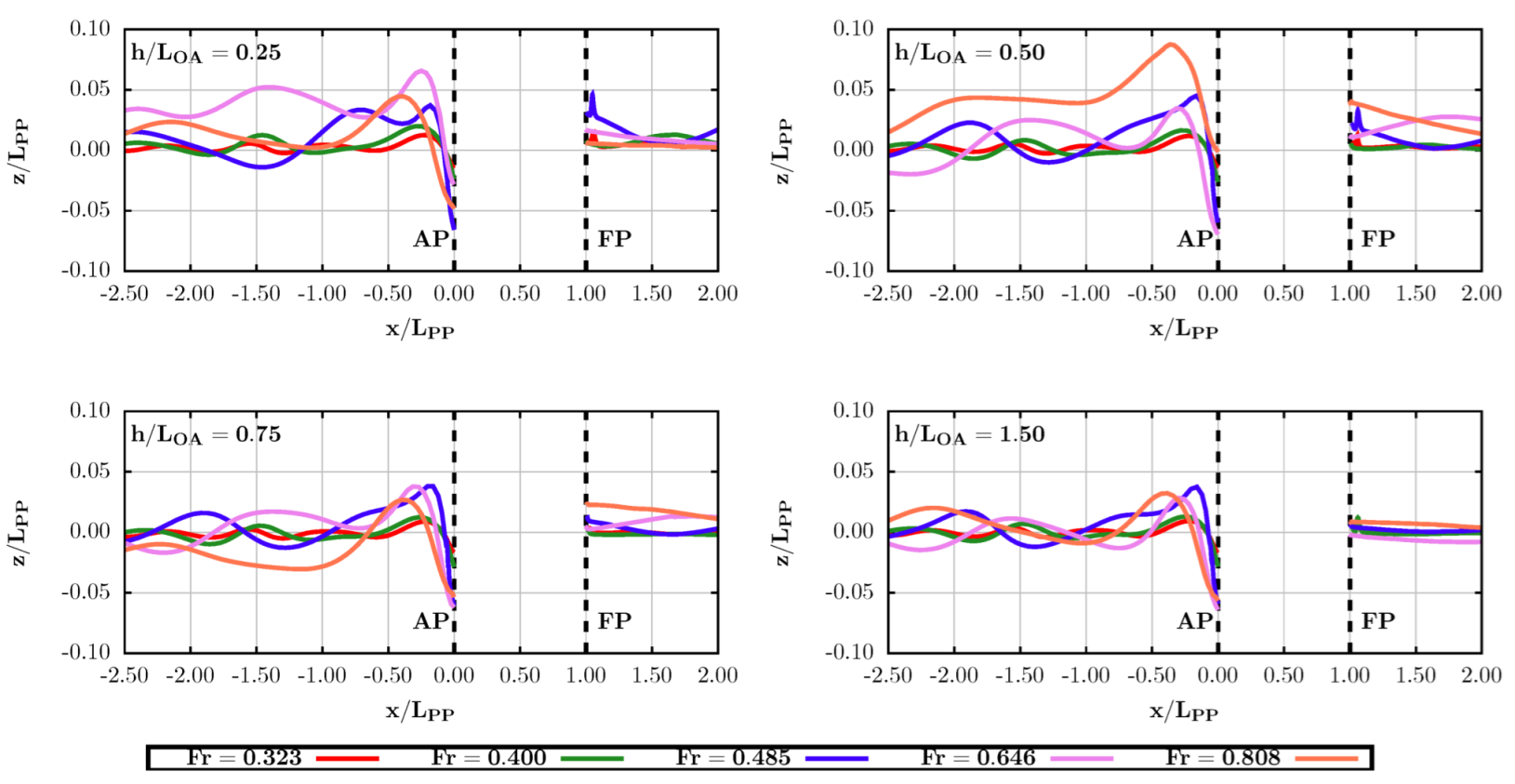
In the URANS-based study described here, we have investigated the hydrodynamic performance of a full-scale catamaran with dimensions and geometry corresponding to a Wave-Adaptive-Modular-Vehicle (WAM-V 16) catamaran operating in shallow waters for Froude numbers in the range using OpenFOAM-v2106® (Open Field Operation and Manipulation). WAM-V 16 catamarans are being utilized as unmanned surface vehicles (USVs), and the study is in support of developing autonomous control systems for the vehicles while operating in shallow coastal waters. We include consideration of a range of intermediate depths and do not assume symmetry about the catamaran center-line. While the latter requires computing the whole domain, it facilitates extending the CFD code to consider roll and sway motion of the catamaran and operations in oblique waves. Additionally, no-slip boundary condition is applied on the bottom boundary to allow proper consideration of the viscous effects in shallow waters. The objective of the current study is to characterize the effects of limited water depth on the resistance, trim, sinkage and wave interference between the demihulls as functions of . The wave field generated by the catamaran is examined and its relationship to observed impacts on resistance, trim and sinkage are discussed. Finally, we examine the characteristics of the Kelvin angle of the catamaran’s wake in terms of both and .





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













