Genetic Algorithm for Sparse Optimization of Mills Cross Array Used in Underwater Acoustic Imaging


Abstract
:1. Introduction
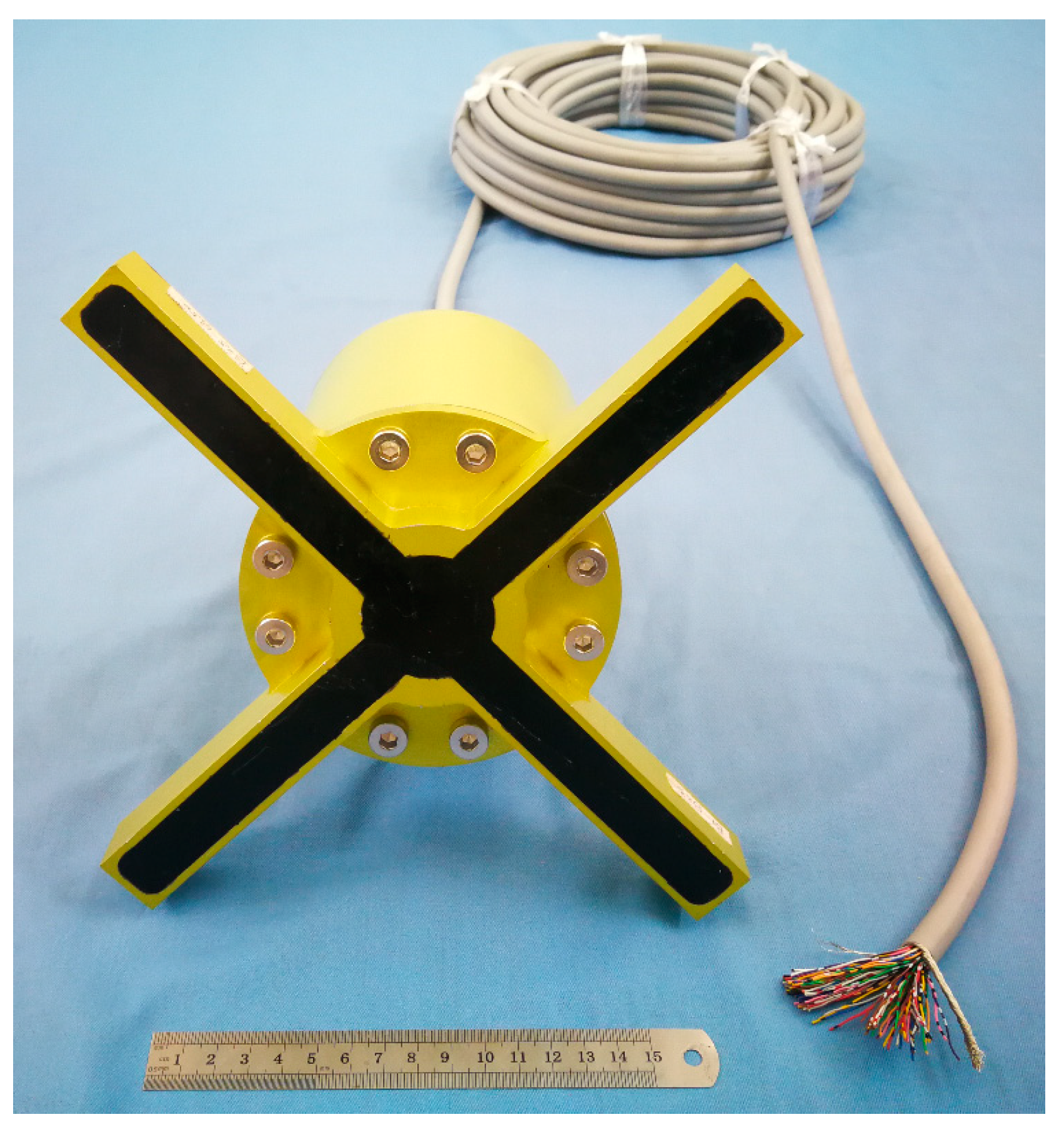
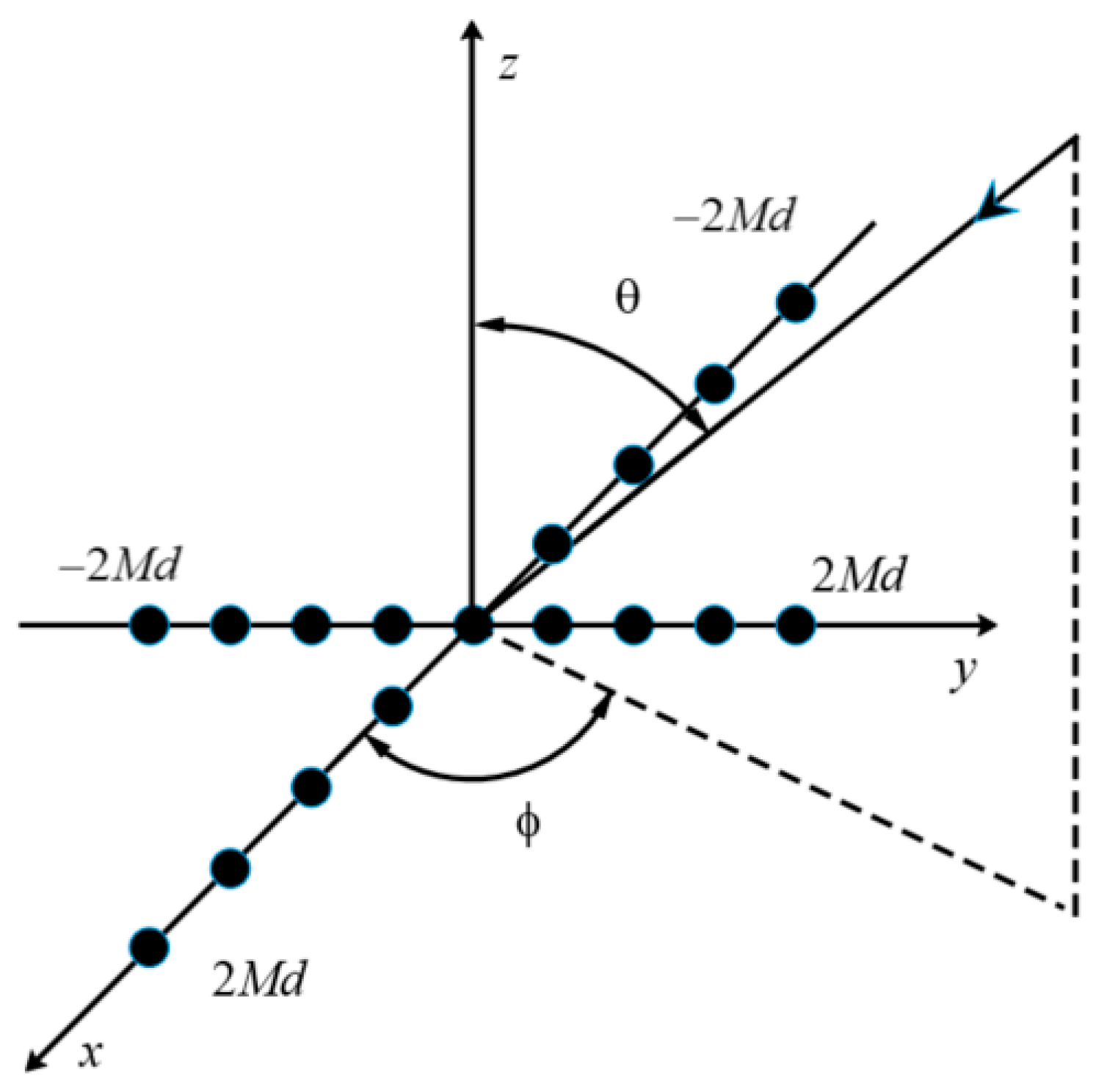
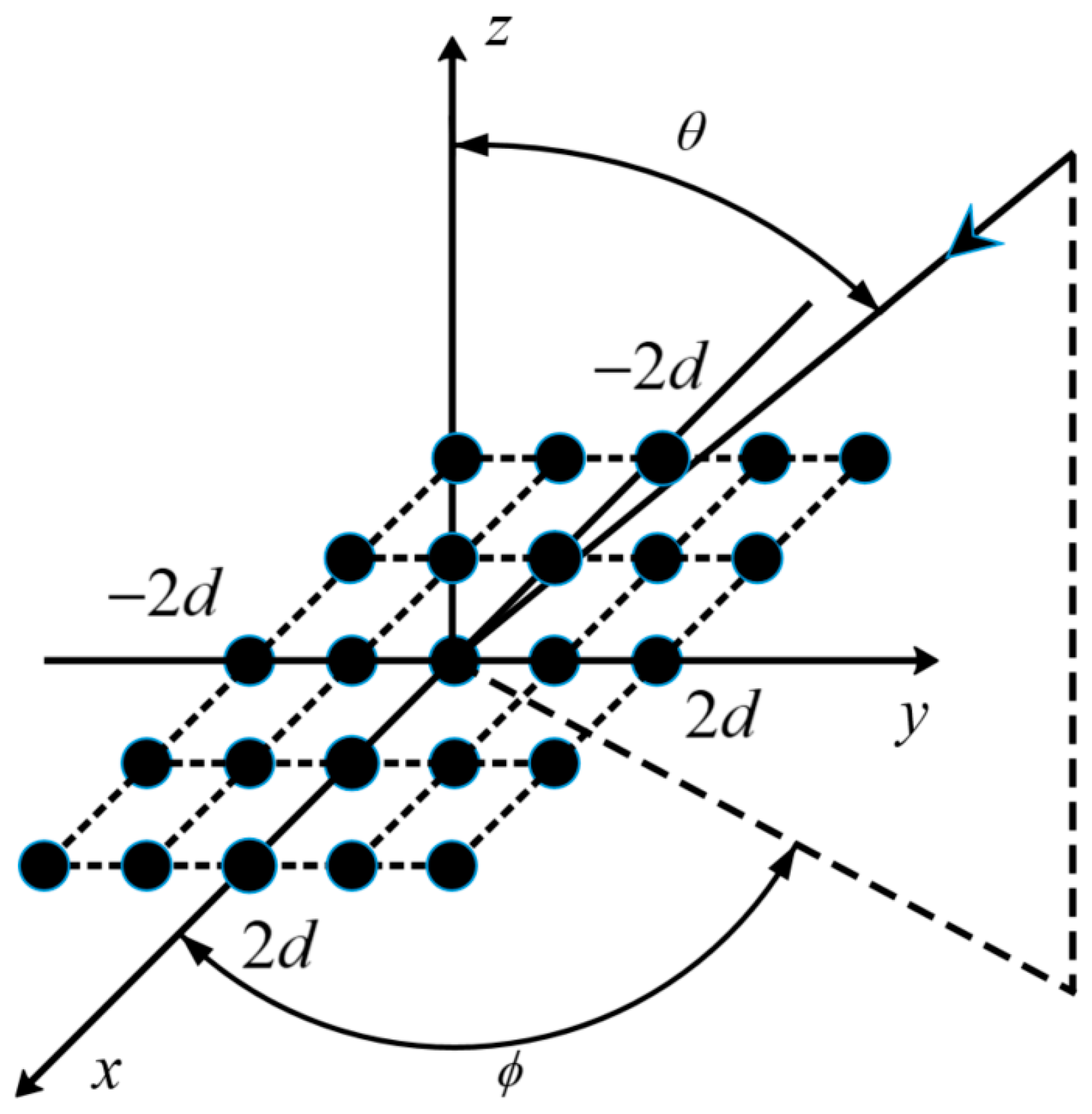
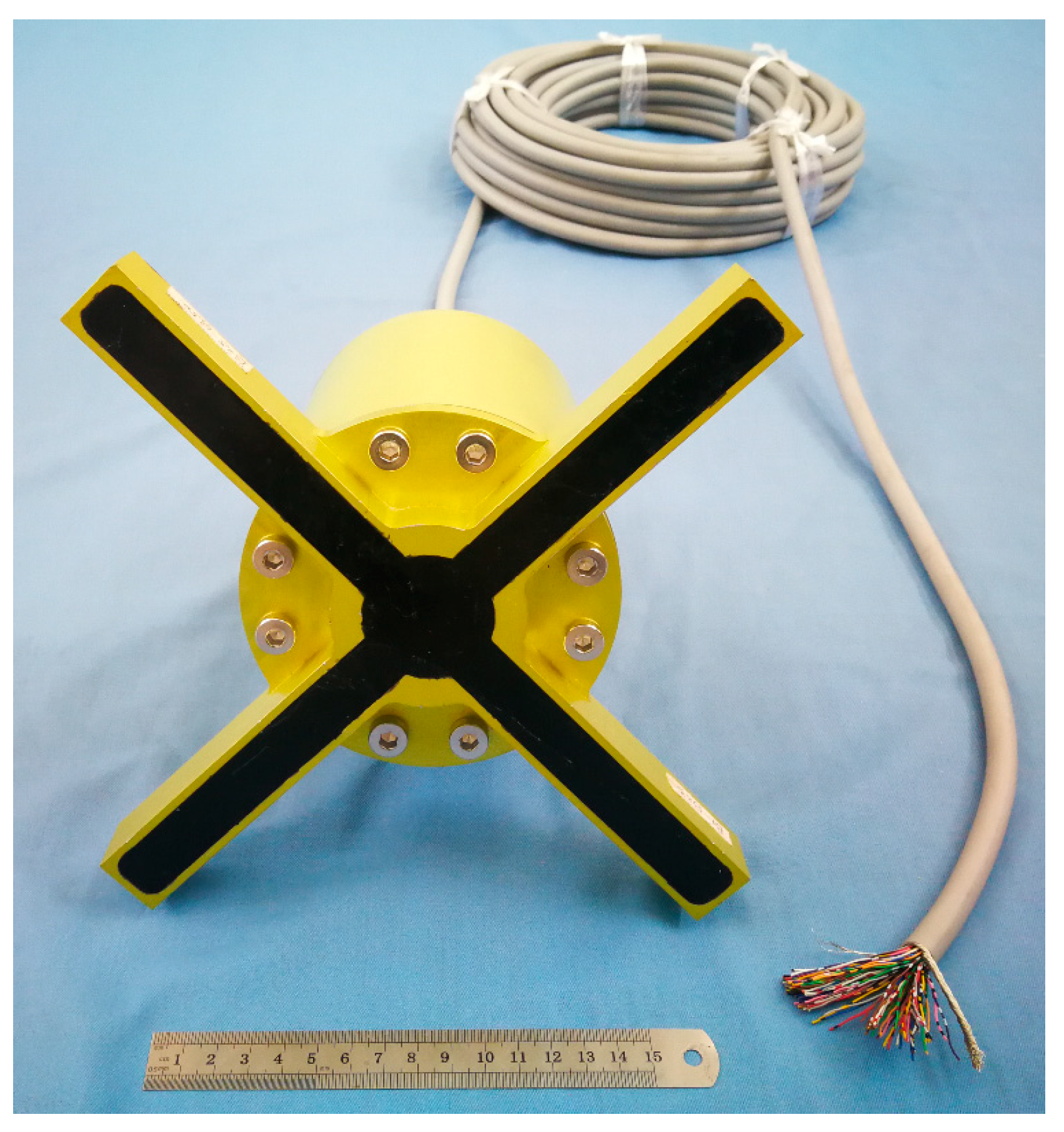
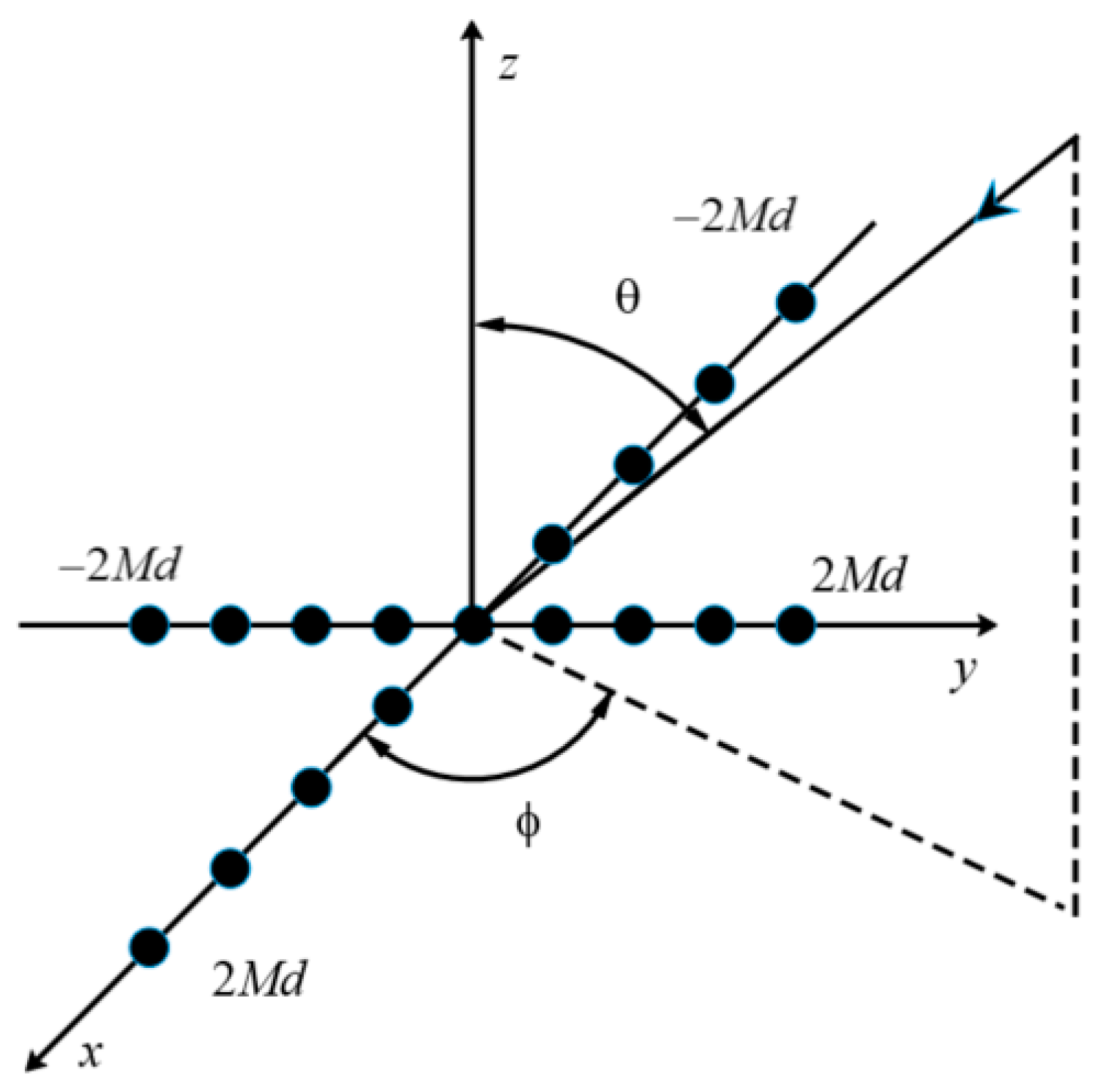
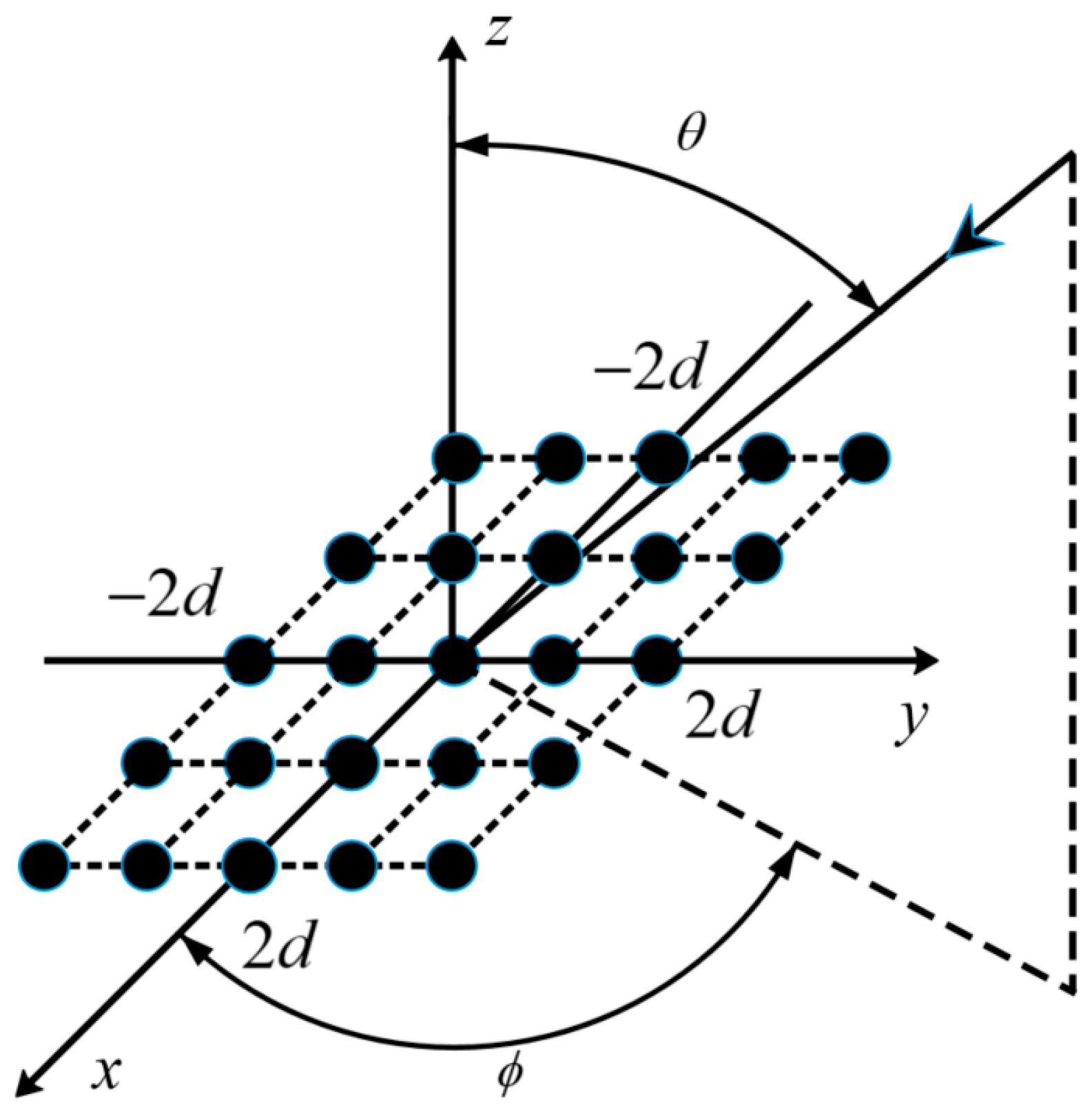
2. Mills Cross Multiplicative Array
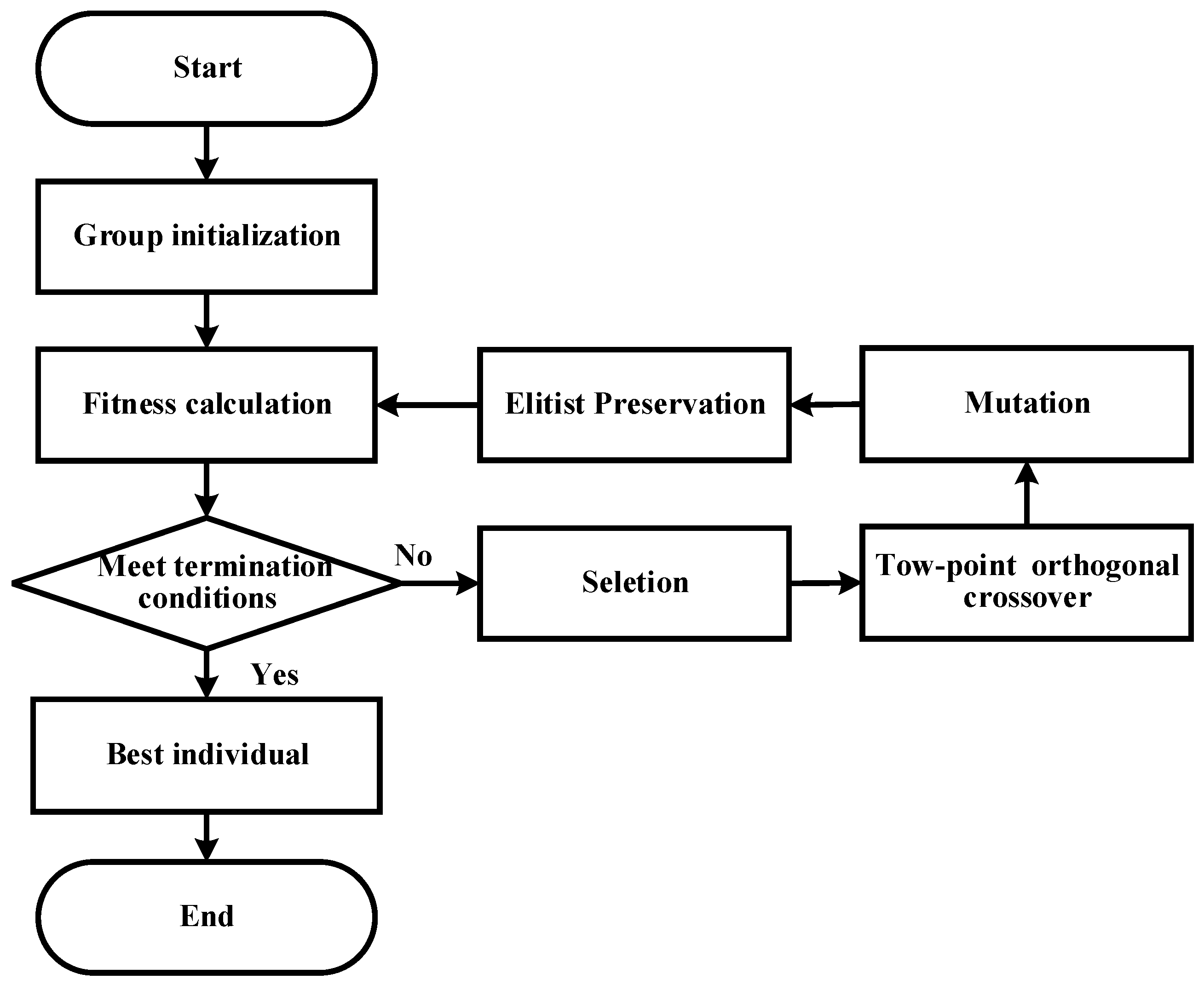
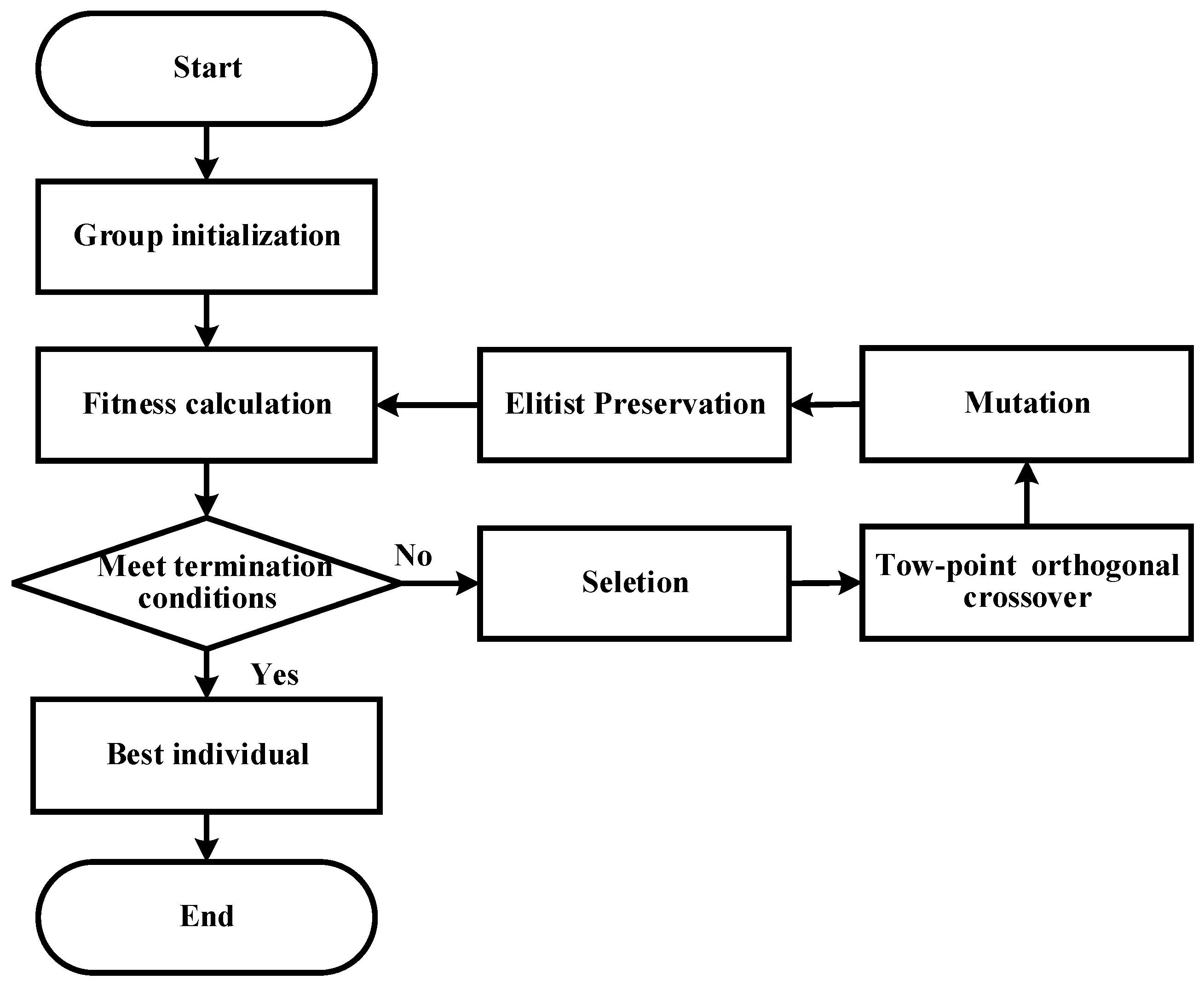
3. Improved Genetic Algorithm
- (1)
- Population coding
- (2)
- Fitness function
- (3)
- Selecting operation
- (4)
- Two-point Orthogonal Crossover Operation
- (5)
- Mutation operator
- (6)
- Elitist Preservation
4. Sparse Optimization of Mills Cross Array
5. Conclusions
- (1)
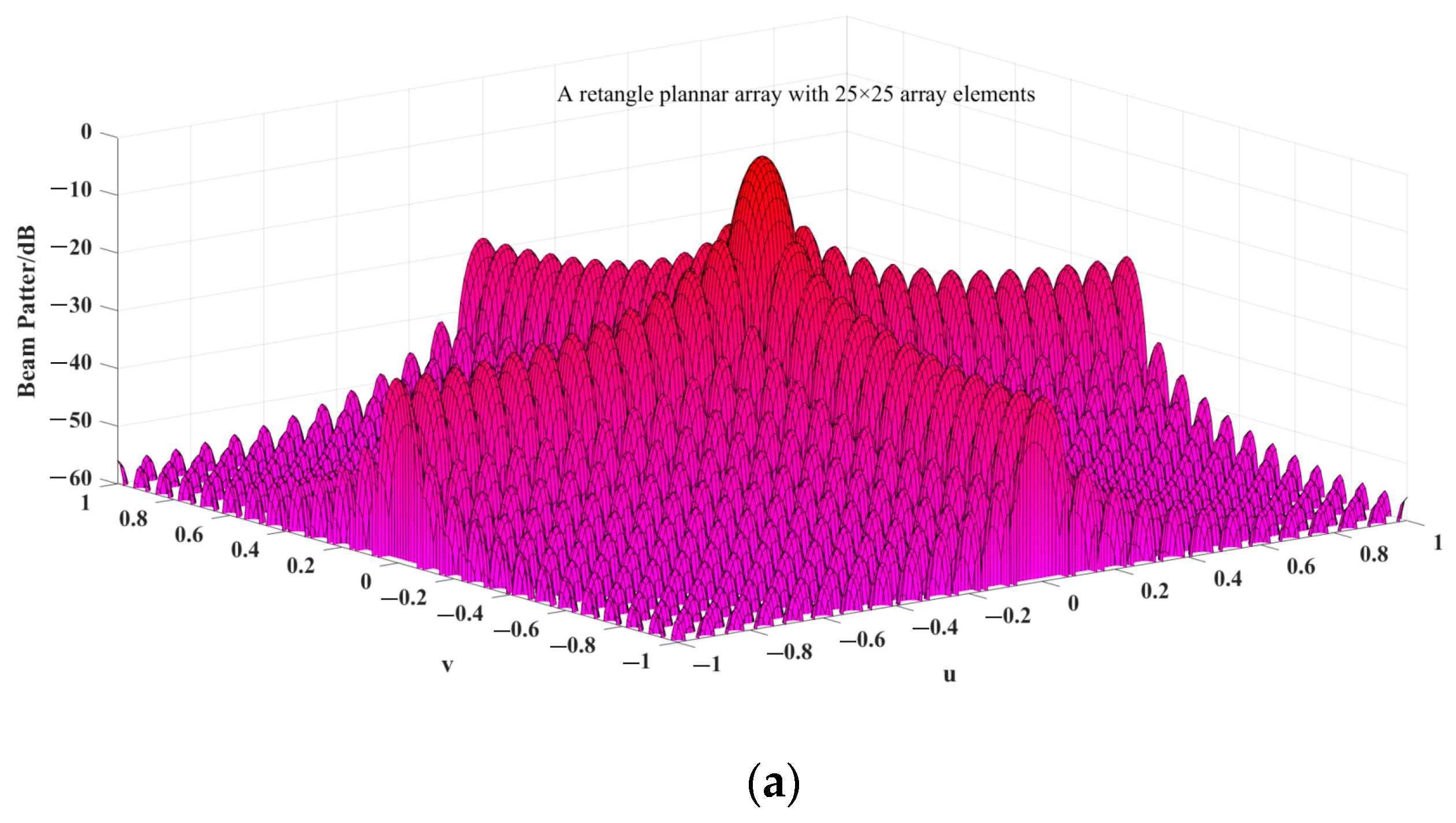
- Compared with the rectangular planar array, Mills cross multiplicative array has distinct advantage in reducing elements of acoustic imaging array, without losing imaging resolution. It is an available choice to be used in UAI application.
- (2)
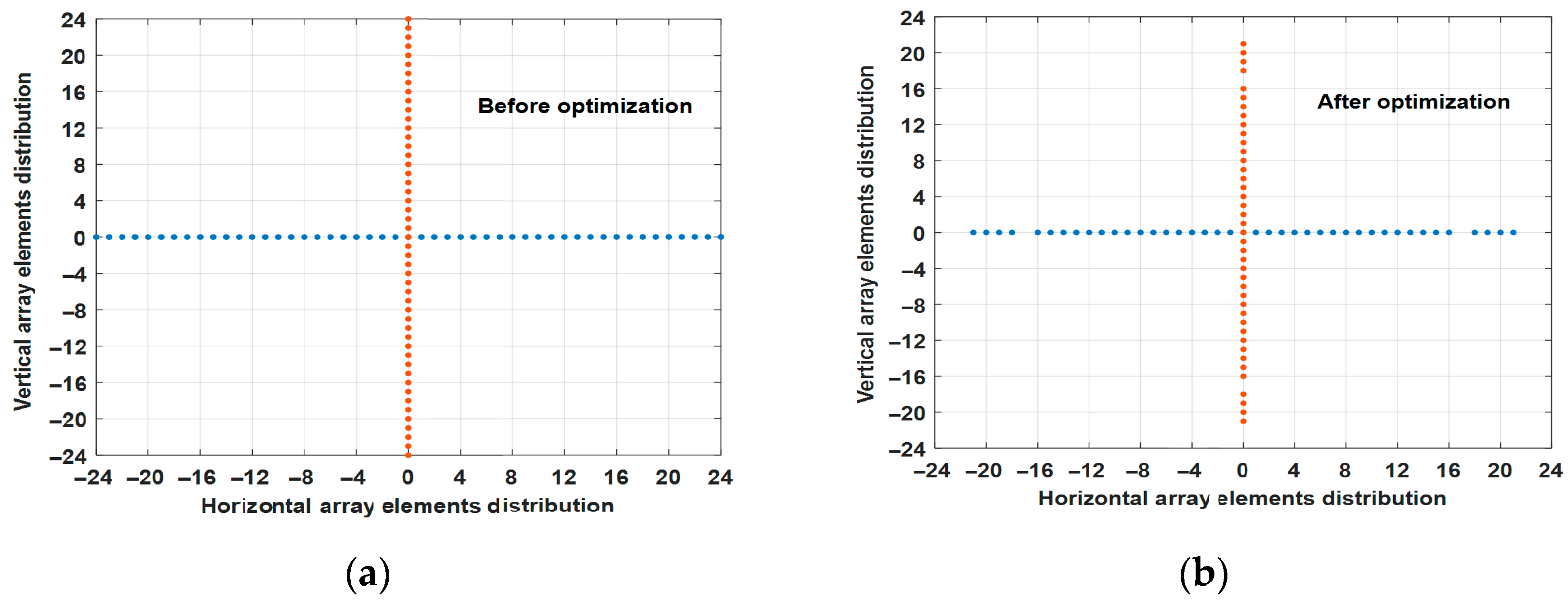
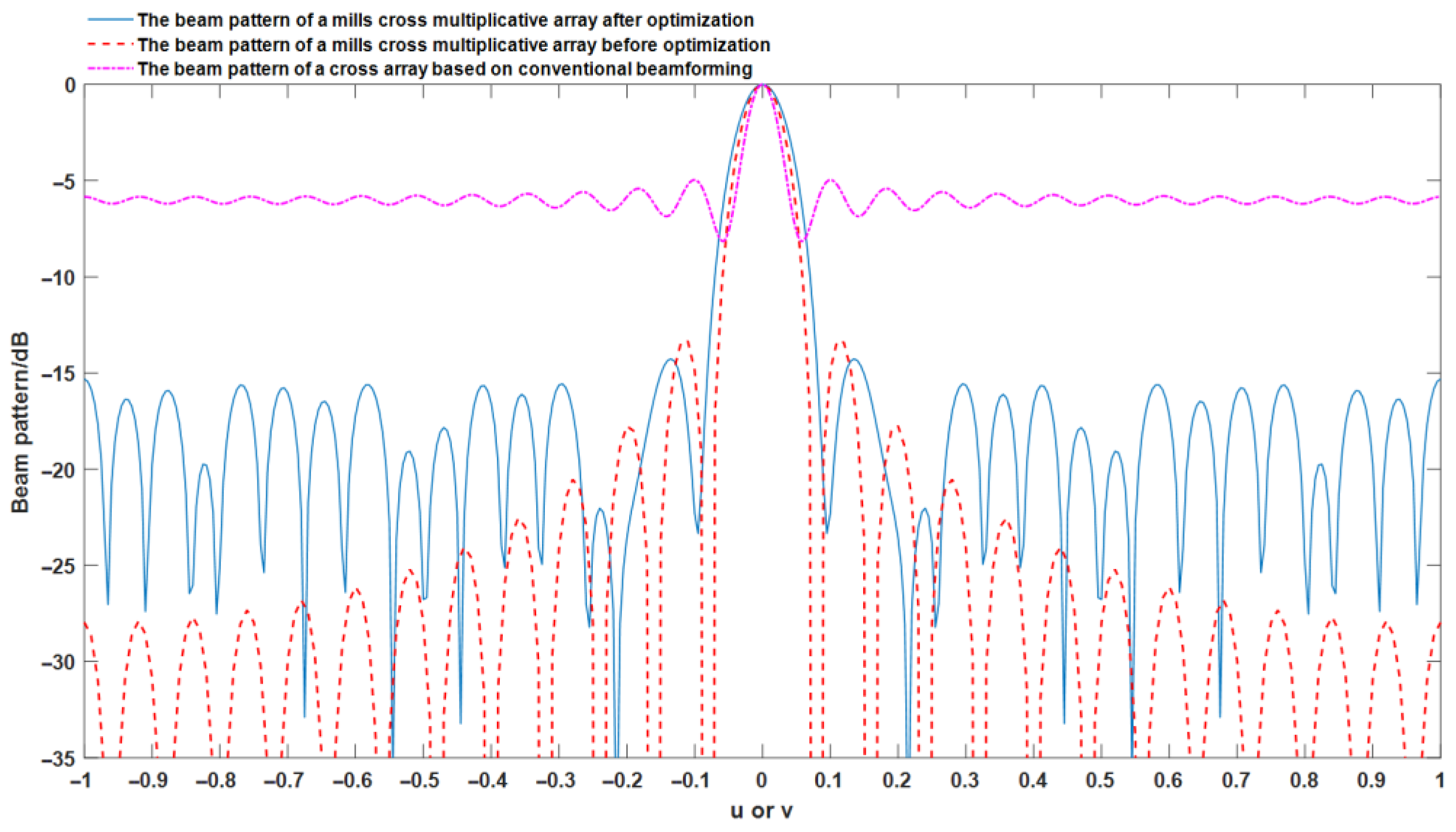
- Sparse optimization of Mills cross multiplicative array can be implemented through improved genetic algorithm. The sparse cross array decreases the number of elements by 8.25% compared with MCMA, while it still keeps its advantages of beamwidth and maximum sidelobe level.
- (3)
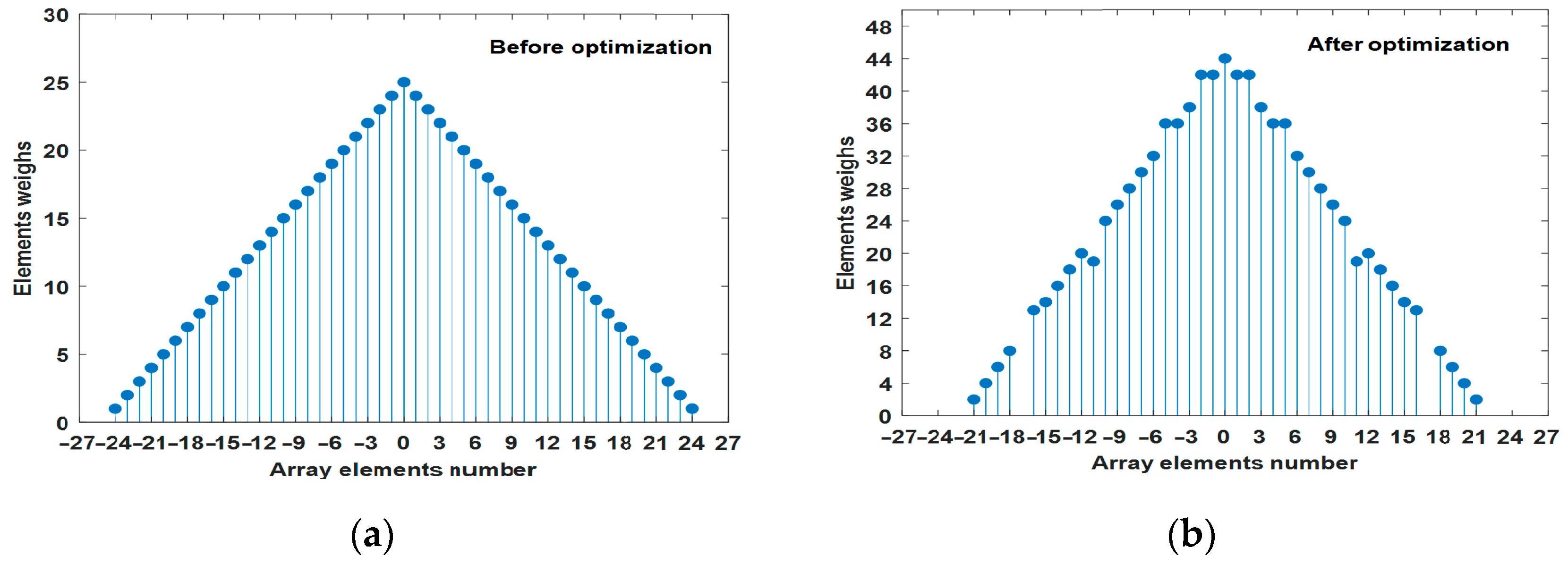
- The improved genetic algorithm is effective to obtain a sparse solution of cross array. The fitness function based on pattern indices is applicable. Two-point orthogonal crossover operator can retain elitist individuals with a high probability. The sparse solution is an evolved result of mutual restraint between array elements’ survival and their weights.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Grelowska, G.; Kozaczka, E. Underwater acoustic imaging of the sea. Arch. Acoust. 2014, 39, 439–452. [Google Scholar] [CrossRef] [Green Version]
- Esmaiel, H.; Qasem, Z.A.H.; Su, H.X.; Wang, J.F.; Junejo, N.U.R. Underwater image transmission using spatial modulation unequal error protection for internet of underwater things. Sensors 2019, 19, 5271. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cui, J.F.; Han, G.Y.; Su, Y.S.; Fu, X.M. Non-uniform non-orthogonal multicarrier underwater communication for compressed sonar image data transmission. IEEE Trans. Veh. Technol. 2021, 17, 10133–10145. [Google Scholar] [CrossRef]
- Ferreira, F.; Machado, D.; Ferri, G.; Dugelay, S.; Potter, J. Underwater optical and acoustic imaging: A time for fusion? A brief overview of the state-of-the-art. In Proceedings of the Ocean 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar]
- Trucco, A.; Palmese, M.; Fusiello, A.; Murino, V. Three-dimensional underwater acoustical imaging and processing. In Underwater Acoustic Digital Signal Processing and Communication Systems; Istepanian, R.S.H., Stojanovic, M., Eds.; Springer: Boston, MA, USA, 2002; pp. 247–274. [Google Scholar]
- Sutton, J.L. Real-time signal processing in underwater acoustic imaging. In Proceedings of the Real-Time Signal Processing I, SPIE Proceedings, Bellingham, WA, USA, 8 December 1978; Volume 154, pp. 38–44. [Google Scholar]
- Jones, I.S.F. High resolution underwater acoustic imaging. In Proceedings of the Oceans 99. MTS/IEEE Riding the Crest into the 21st Century Conference and Exhibition, Seattle, WA, USA, 13–16 September 1999; pp. 1093–1097. [Google Scholar]
- Konapally, P.; Tiwari, M. Review of array for underwater imaging applications. Turk. J. Physiother. Rehabil. 2021, 32, 349–356. [Google Scholar]
- Liu, X.; Zhao, D.; Chen, Y.; Zhou, F.; Jiang, R. A Method to Optimize Three-Dimensional Acoustic Imaging cross Array. Chinese Patent CN 108828603 A, 16 November 2018. [Google Scholar]
- Okino, M.; Higashi, Y. Measurement of seabed topography by multibeam sonar using CFFT. IEEE J. Ocean. Eng. 1986, 11, 474–479. [Google Scholar] [CrossRef]
- Alais, P.; Cesbron, N.; Challande, P.; Ollivier, F. 3-D underwater imaging system. In Acoustical Imaging; Jones, J.P., Ed.; Springer: Boston, MA, USA, 1995; pp. 723–728. [Google Scholar]
- Murino, V.; Trucco, A. Three-dimensional image generation processing in underwater acoustic vision. Proceeding IEEE 2000, 88, 1903–1946. [Google Scholar] [CrossRef]
- Yen, J.T. Beamforming of sound from two-dimensional arrays using spatial matched filters. J. Acoust. Soc. Am. 2013, 134, 3697–3704. [Google Scholar] [CrossRef] [PubMed]
- Holland, J.H. Adaptation in Natural and Artificial Systems; MIT Press: Cambridge, MA, USA, 1975; pp. 1–12. [Google Scholar]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar]
- Fu, Y.; Yuan, N.; Mao, J. Design of unequally spaced thinned arrays based on genetic algorithm and simulated annealing. J. Electron. Inf. Technol. 2001, 7, 700–704. [Google Scholar]
- Modiri, A.; Kiasaleh, K. Modification of real-number and binary PSO algorithms for accelerated convergence. IEEE Trans. Antennas Propag. 2011, 59, 214–224. [Google Scholar] [CrossRef]
- Li, W. Study on Sparse Optimization Design of Underwater Acoustic Imaging Sensor Array. Master’s Thesis, Nanjing University of Information Engineering, Nanjing, China, 2018; pp. 24–32. [Google Scholar]
- Kocak, D.M.; Caimi, F.M. The current art of underwater imaging–with a glimpse of the past and vision of the future. Mar. Technol. Soc. J. 2005, 39, 5–26. [Google Scholar] [CrossRef]
- Mills, B.Y.; Little, A.G. A high-resolution aerial system of a new type. Aust. J. Phys. 1953, 6, 272. [Google Scholar] [CrossRef]
- MacPhie, R.H. A Mills cross multiplicative array with the power pattern of a conventional planar array. In Proceedings of the 2007 IEEE Antennas and Propagation Society International Symposium, Honolulu, HI, USA, 9–15 June 2007; pp. 5961–5964. [Google Scholar]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.V. Fundamentals of Acoustics, 4th ed.; John Wiley & Sons, Inc.: New York, NY, USA, 2000; pp. 188–210. [Google Scholar]
- Mirjalili, S.; Song, D.J.; Sadiq, A.S.; Faris, H. Genetic algorithm: Theory, Literature review and application in image reconstruction. In Nature-Inspired Optimizers; Mirjalili, S., Song, D.J., Lewis, A., Eds.; Springer: Cham, Switzerland, 2020; pp. 69–83. [Google Scholar]
- Mirjalili, S. Genetic Algorithm. In Evolutionary Algorithms and Neural Networks; Mirjalili, S., Ed.; Springer: Cham, Switzerland, 2019; pp. 43–53. [Google Scholar]
- Lipowski, A.; Lipowska, D. Roulette-wheel selection via stochastic acceptance. Phys. A Stat. Mech. Its Appl. 2012, 391, 2193–2196. [Google Scholar] [CrossRef] [Green Version]
- Razali, N.M.; Geraghty, J. Genetic algorithm performance with different selection strategiesin solving TSP. In Proceedings of the World Congress on Engineering 2011, London, UK, 6–8 July 2011; pp. 1134–1139. [Google Scholar]
- Umbarkar, A.J.; Sheth, P.D. Crossover operators in genetic algorithms: A review. ICTACT J. Soft Comput. 2015, 6, 1083–1092. [Google Scholar]
- Picek, S.; Golub, M.; Jakobovic, D. Evaluation of crossover operator performance in genetic algorithms with binary representation. In Bio-Inspired Computing and Applications; Huang, D.S., Gan, Y., Premaratne, P., Han, K., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 223–230. [Google Scholar]
- Gwiazda, T.D. Genetic Algorithms Reference Volume I Crossover for Single-Objective Numerical Optimization Problems; Tomasz Gwiazda: Lomianki, Poland, 2006; pp. 344–355. [Google Scholar]
- Liu, Q.; Liao, Z.; Shen, Z.Y.; Wang, B.L. Genetic algorithm with multi-point orthogonal crossover operation. Comput. Eng. 2005, 31, 151–158. [Google Scholar]
- Soni, N.; Kumar, T. Study of various mutation operators in genetic algorithms. Int. J. Comput. Sci. Inf. Technol. 2014, 5, 4519–4521. [Google Scholar]
- Guan, B.X.; Zhang, C.S.; Ning, J.X. Genetic algorithm with a crossover elitist preservation mechanism for protein–ligand docking. AMB Express 2017, 7, 174. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, X.S. Genetic algorithms. In Nature-Inspired Optimization Algorithms, 2nd ed.; Academic Press: Cambridge, MA, USA; Elsevier: Amsterdam, The Netherlands, 2020; pp. 77–87. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Individual Substring Number Individual after | I | II | III |
|---|---|---|---|
| Crossover Operation | |||
| 1 | a | a | a |
| 2 | a | a | b |
| 3 | a | b | a |
| 4 | a | b | b |
| 5 | b | a | a |
| 6 | b | a | b |
| 7 | b | b | a |
| 8 | b | b | b |
| Cross Array Beamforming Method | Beamwidth | The Maximum Sidelobe Level |
|---|---|---|
| cross array based on conventional beamforming | 3.15° | −4.97 dB |
| Mills cross multiplicative array before optimization | 4.08° | −13.5 dB |
| sparse cross array after optimization | 4.76° | −14.27 dB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, D.; Li, Y.; Yang, H.; Wei, Z.; Li, Y. Genetic Algorithm for Sparse Optimization of Mills Cross Array Used in Underwater Acoustic Imaging. J. Mar. Sci. Eng. 2022, 10, 155. https://doi.org/10.3390/jmse10020155
Teng D, Li Y, Yang H, Wei Z, Li Y. Genetic Algorithm for Sparse Optimization of Mills Cross Array Used in Underwater Acoustic Imaging. Journal of Marine Science and Engineering. 2022; 10(2):155. https://doi.org/10.3390/jmse10020155
Chicago/Turabian StyleTeng, Duo, Yatian Li, Hu Yang, Zhiqiang Wei, and Yaan Li. 2022. "Genetic Algorithm for Sparse Optimization of Mills Cross Array Used in Underwater Acoustic Imaging" Journal of Marine Science and Engineering 10, no. 2: 155. https://doi.org/10.3390/jmse10020155
APA StyleTeng, D., Li, Y., Yang, H., Wei, Z., & Li, Y. (2022). Genetic Algorithm for Sparse Optimization of Mills Cross Array Used in Underwater Acoustic Imaging. Journal of Marine Science and Engineering, 10(2), 155. https://doi.org/10.3390/jmse10020155