
The Development of Regional Vessel Traffic Congestion Forecasts Using Hybrid Data from an Automatic Identification System and a Port Management Information System



Abstract
:1. Introduction
2. Materials and Methods
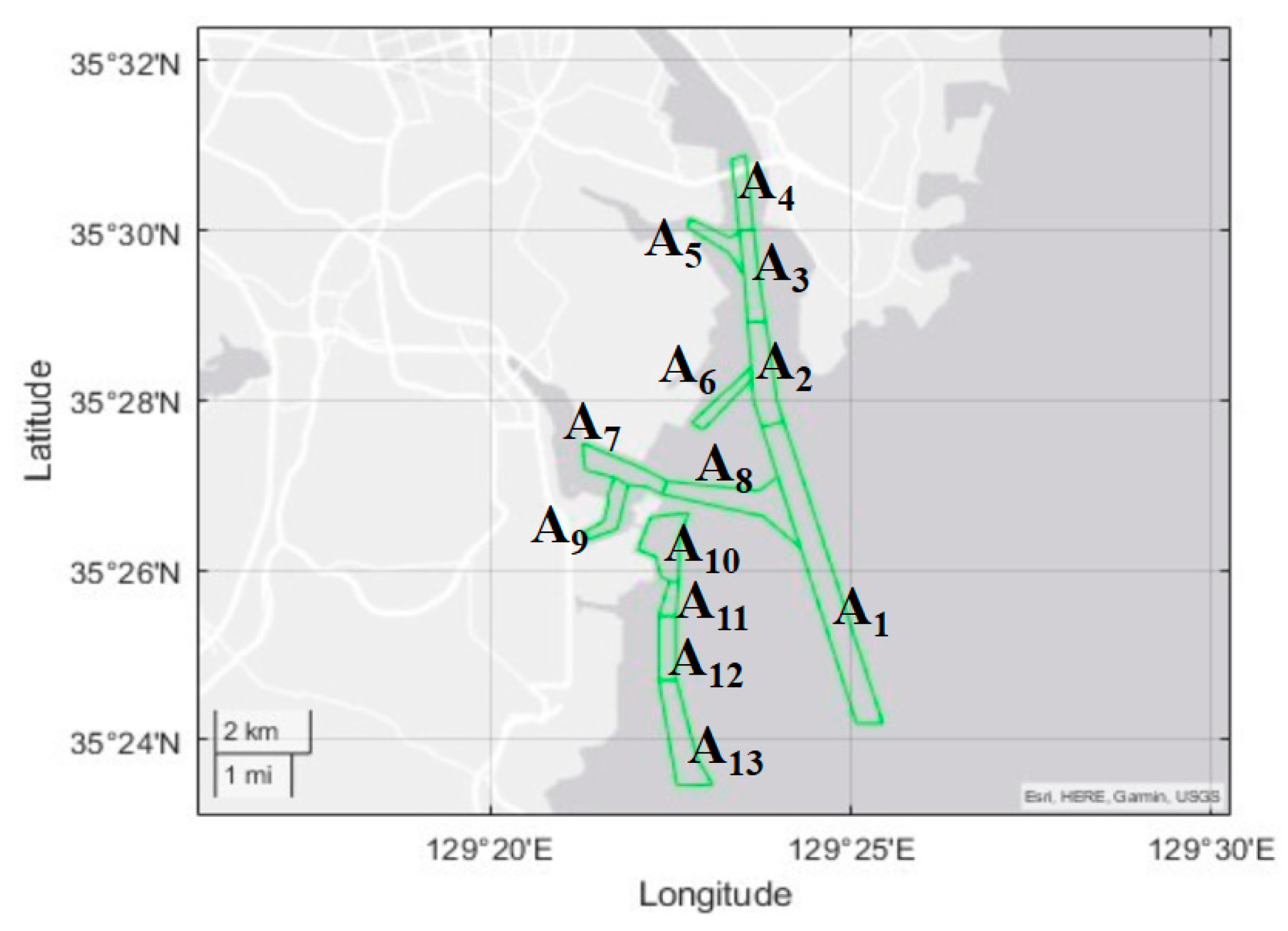
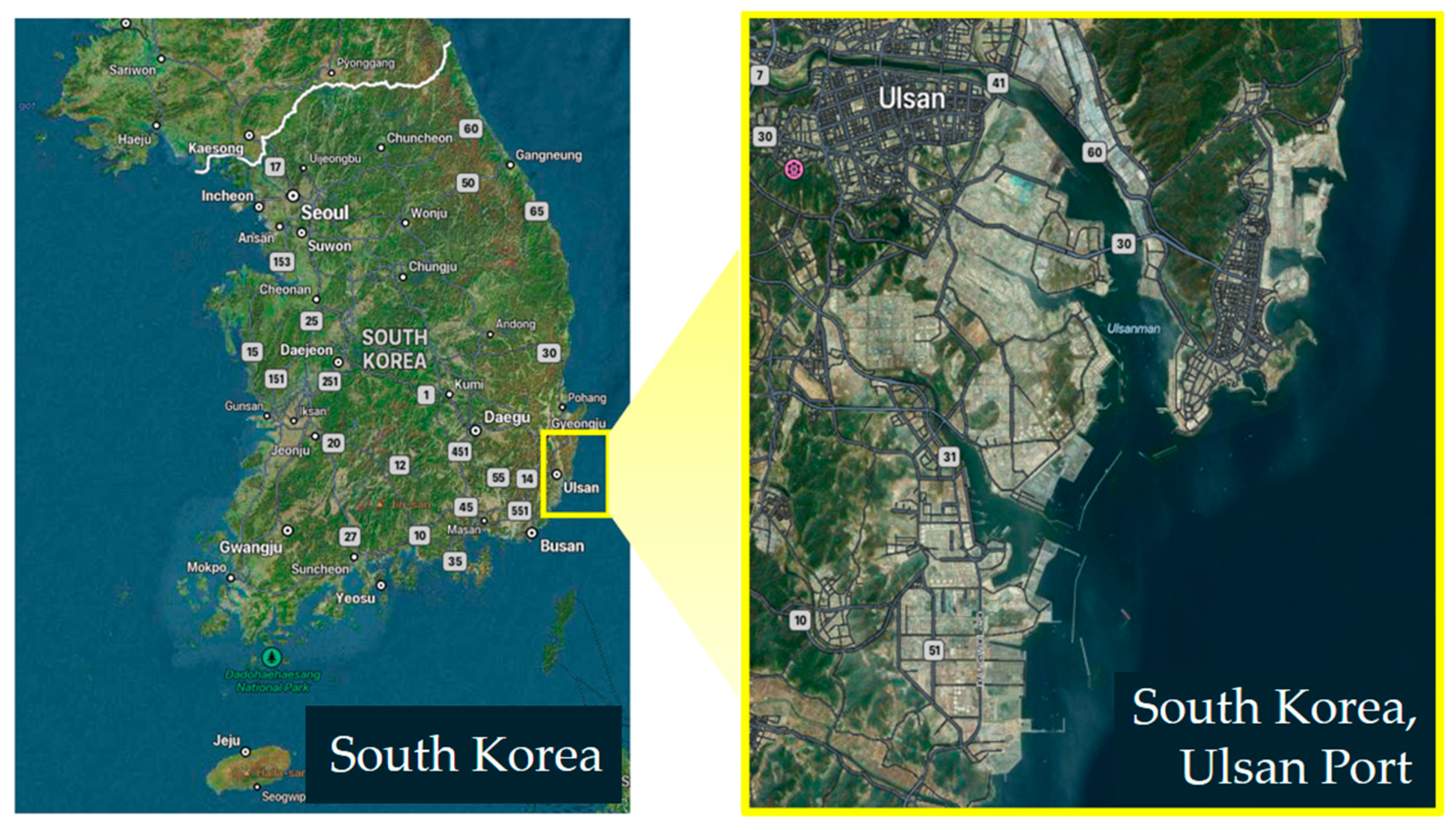
2.1. Problem and Materials
2.1.1. Problem Definition
C(Ak,t) = medium when 3 ≤ Vn < 5;
C(Ak,t) = high when 5 ≤ Vn < 6.
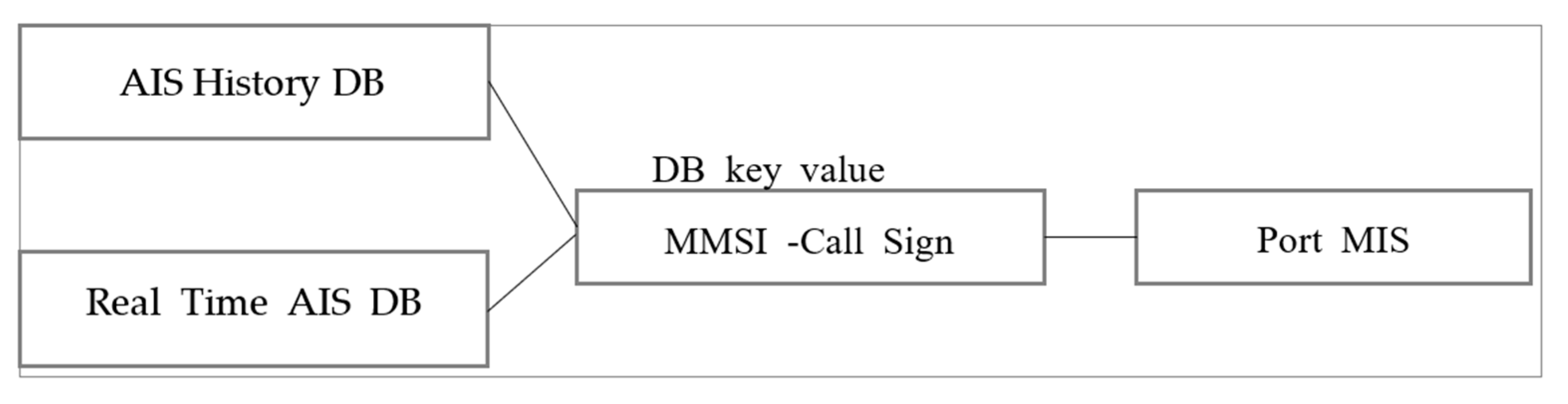
2.1.2. Materials
2.2. Methods
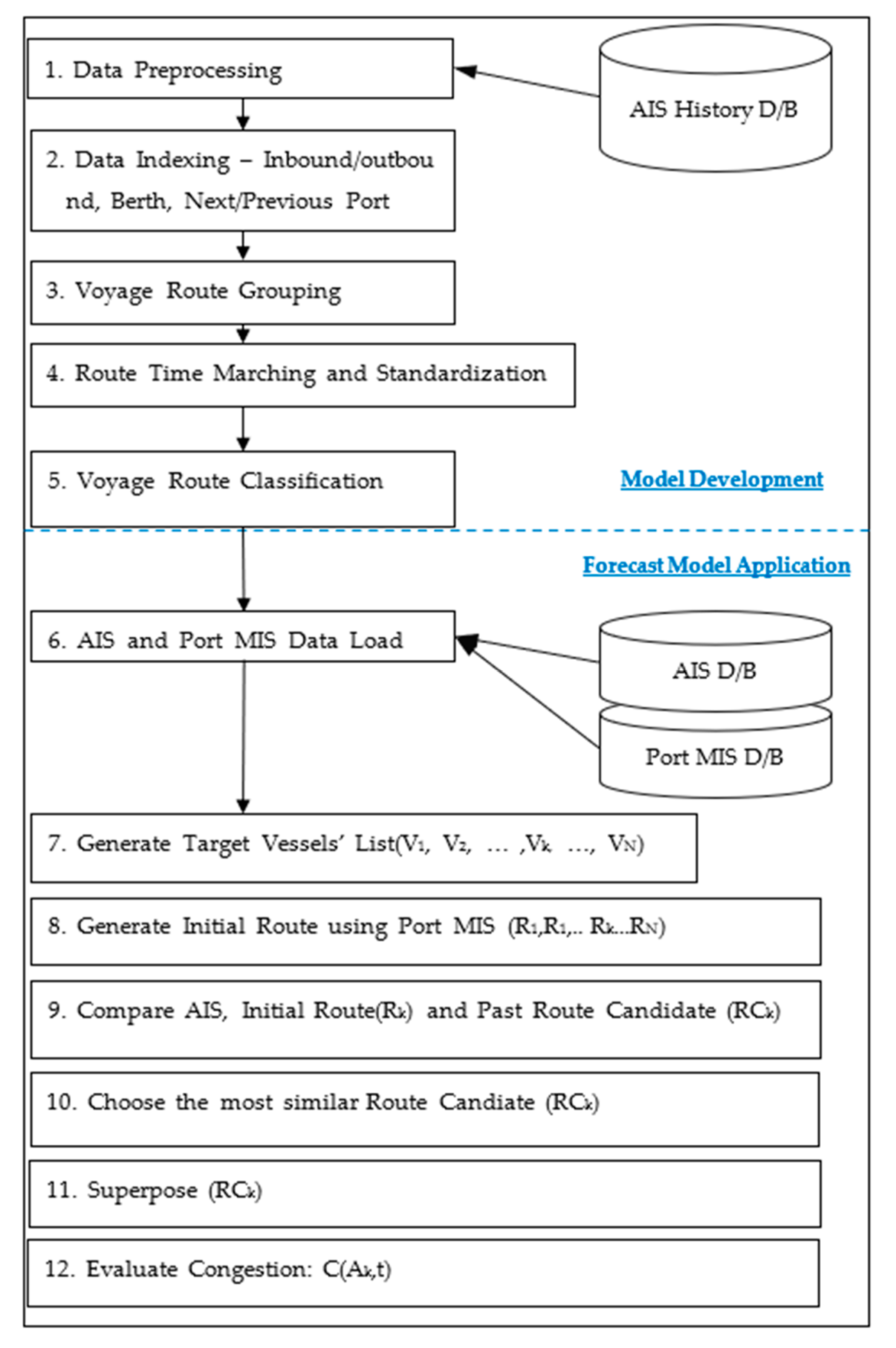
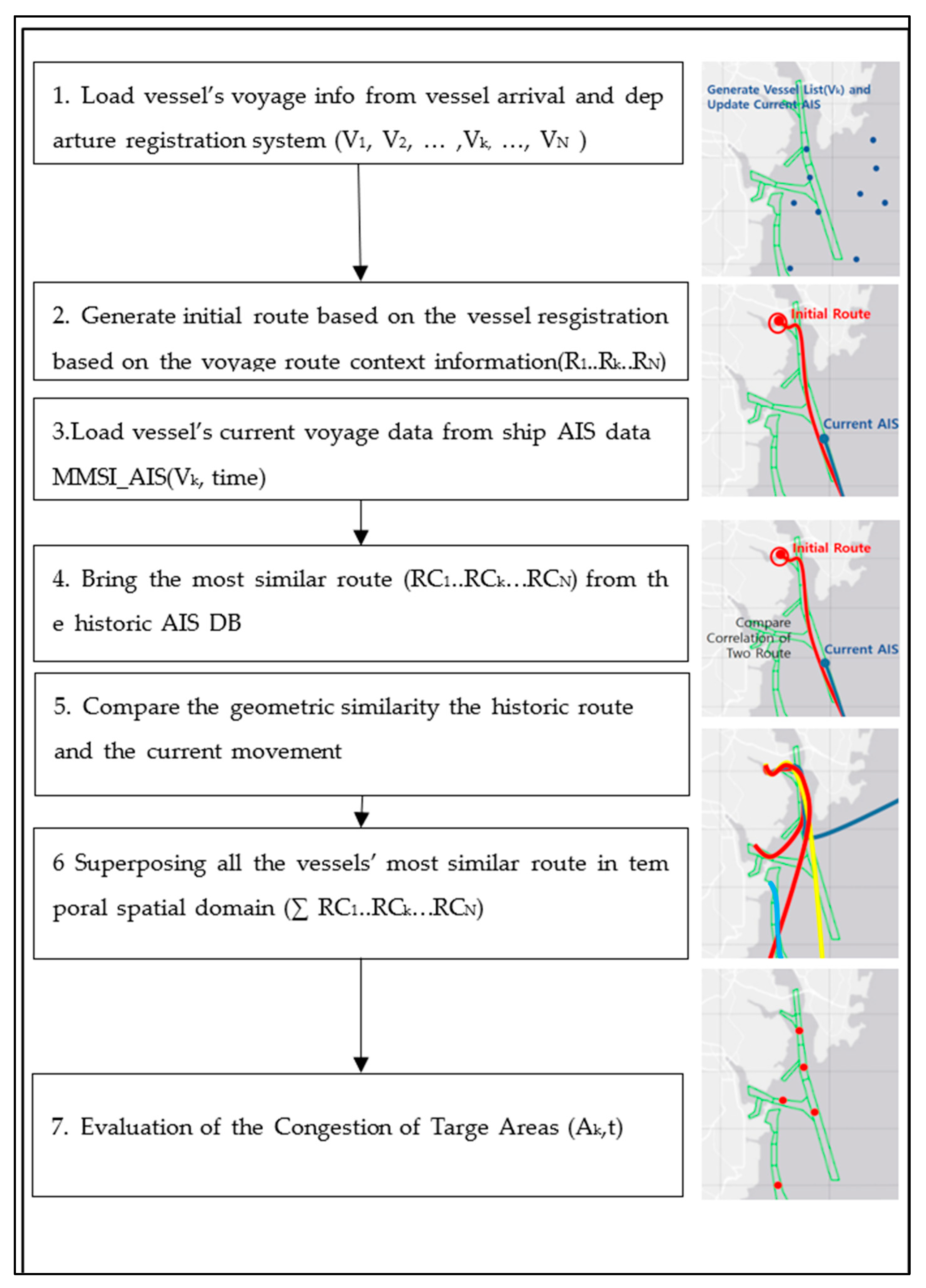
2.2.1. Methodology—Overview
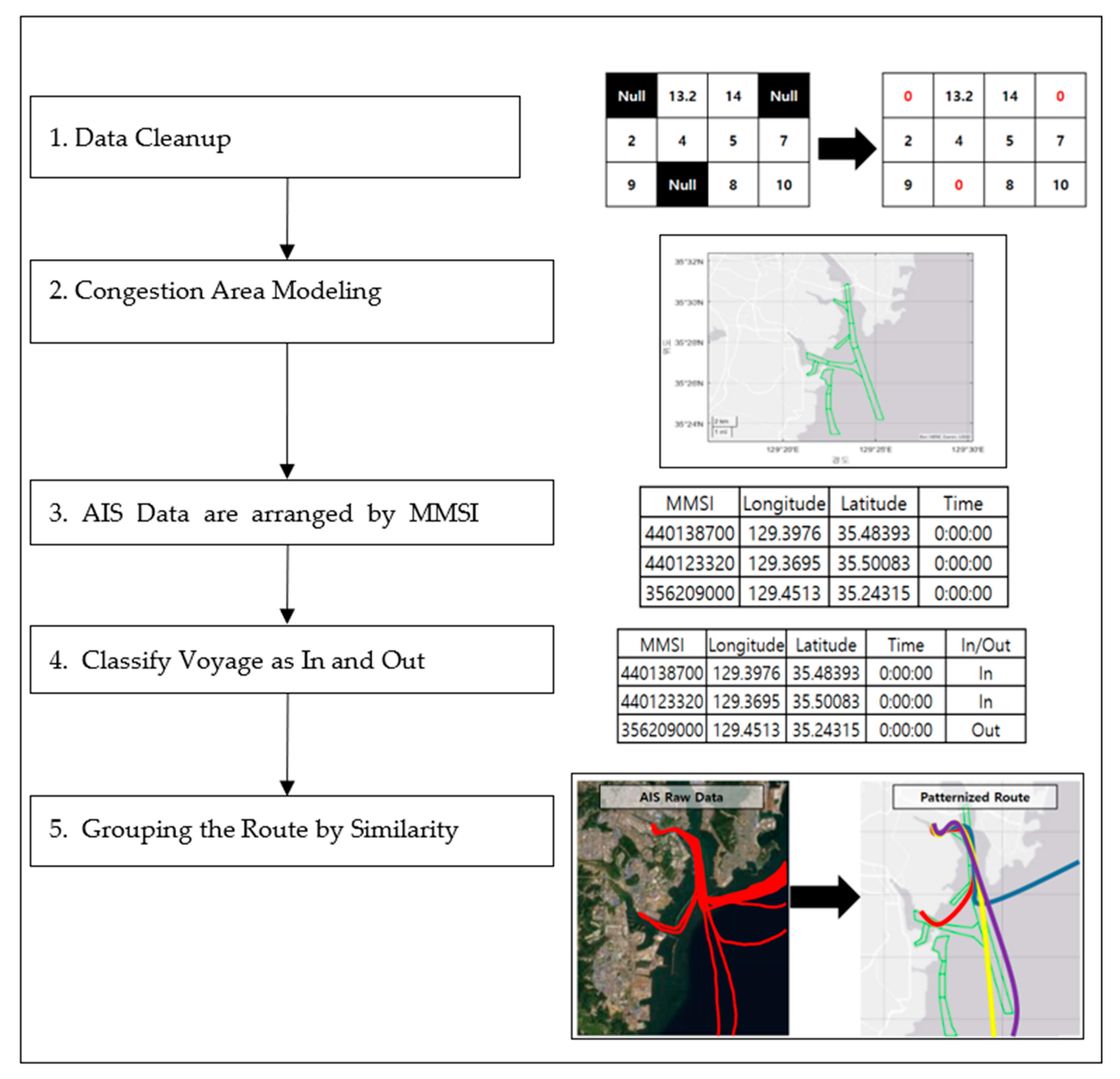
2.2.2. Data Processing
3. Results
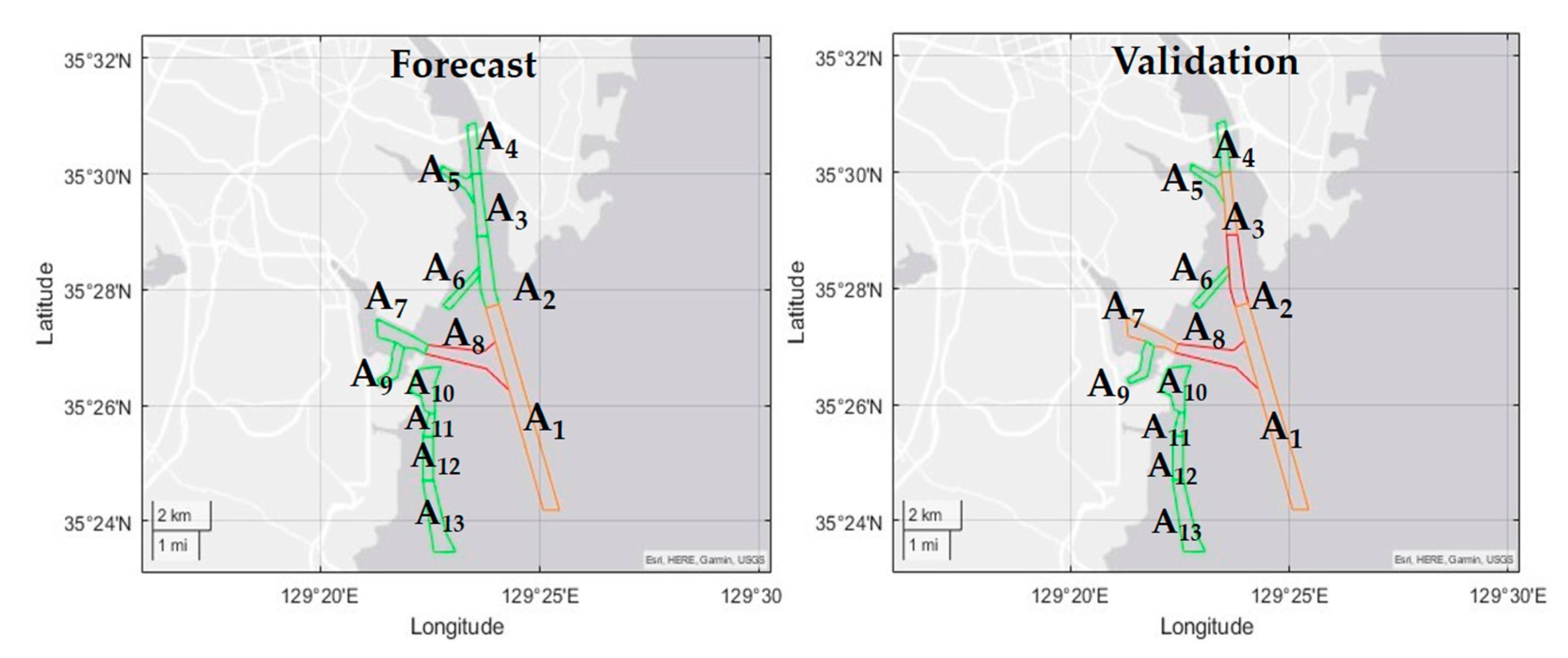
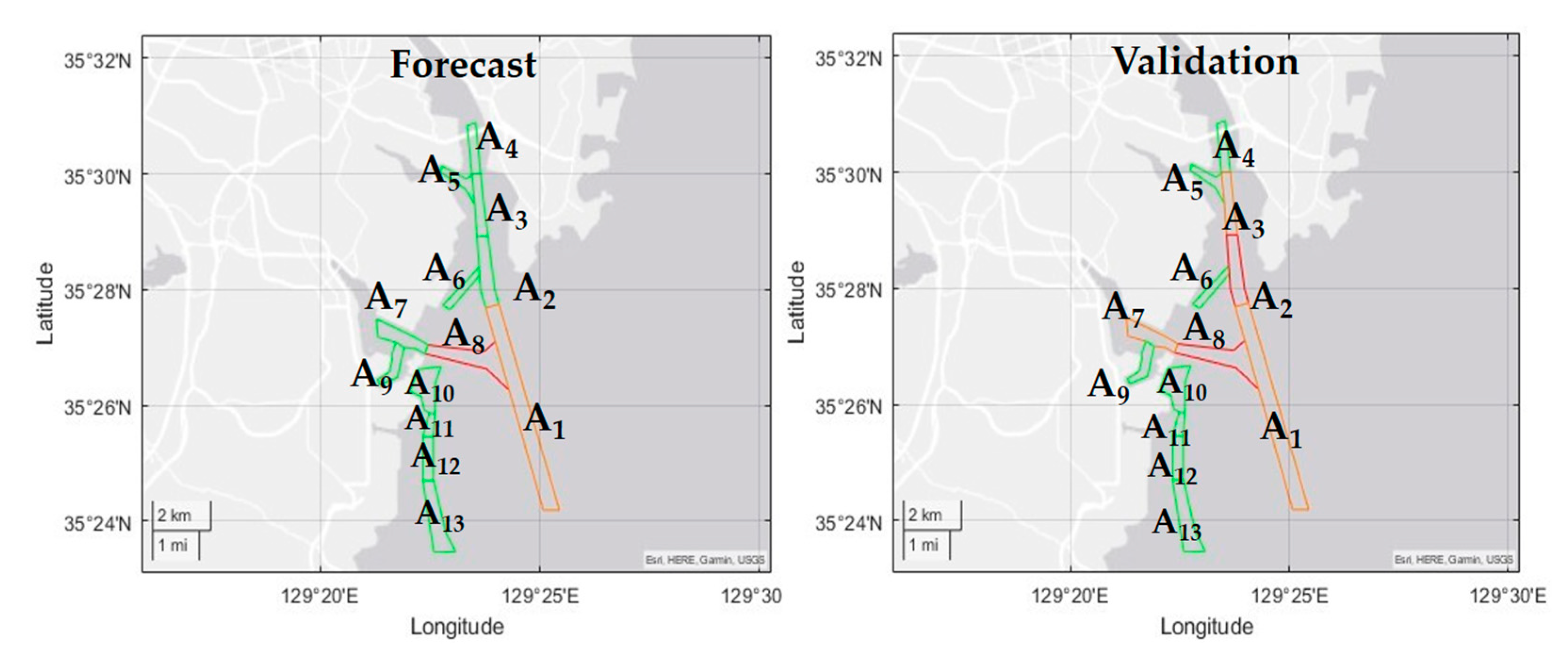
3.1. One-Day Congestion Forecast Result
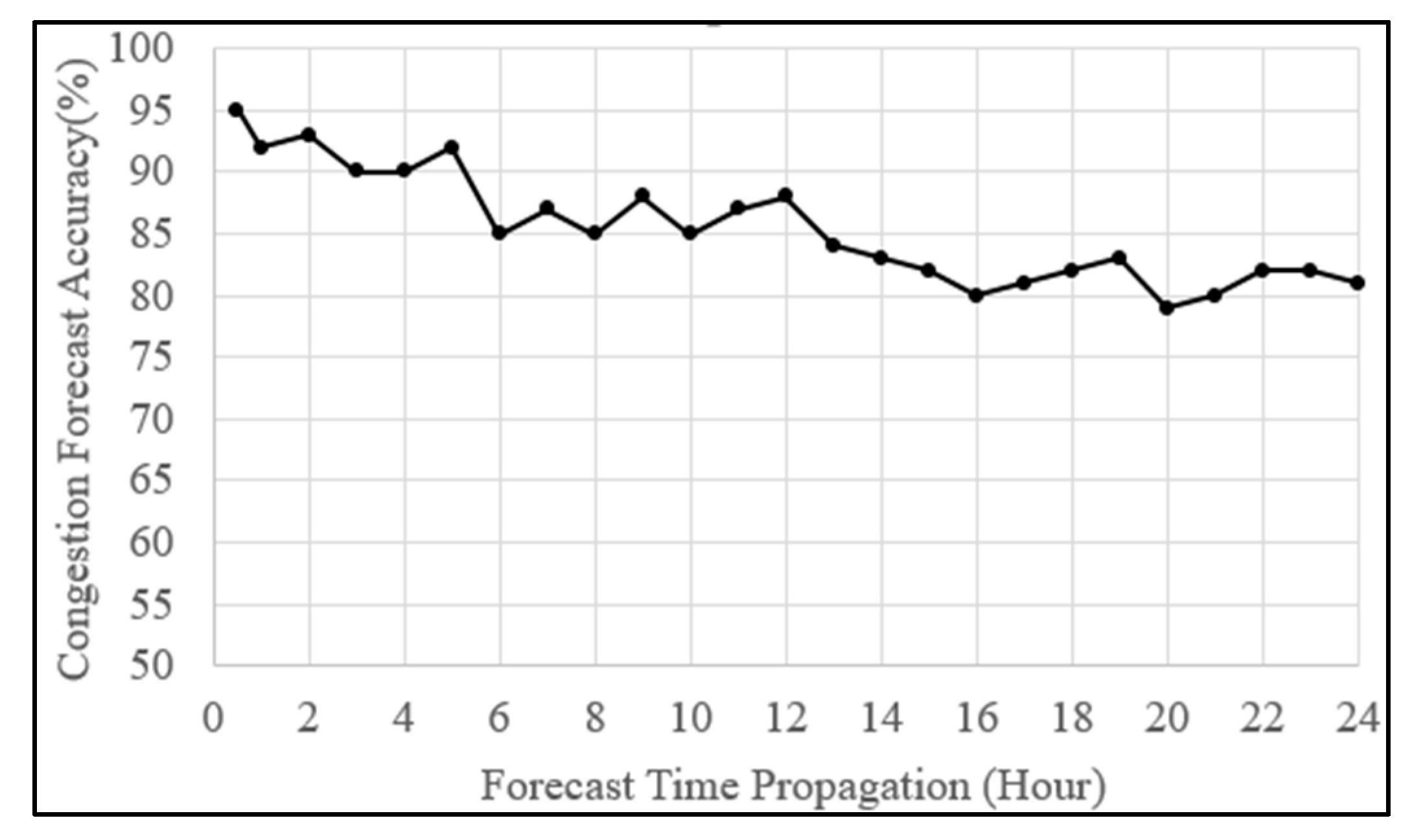
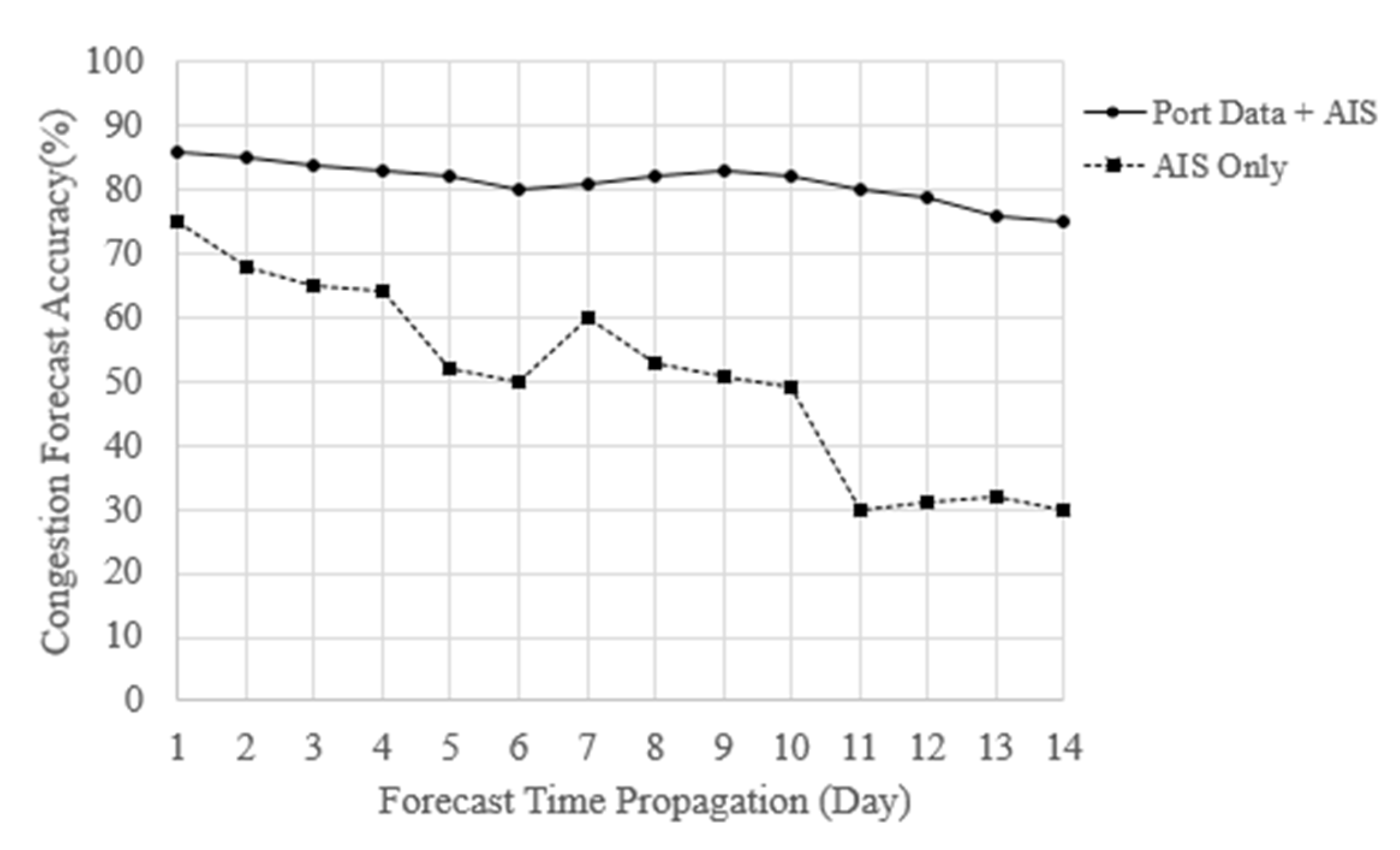
3.2. Forecast Performance by Time Lapse
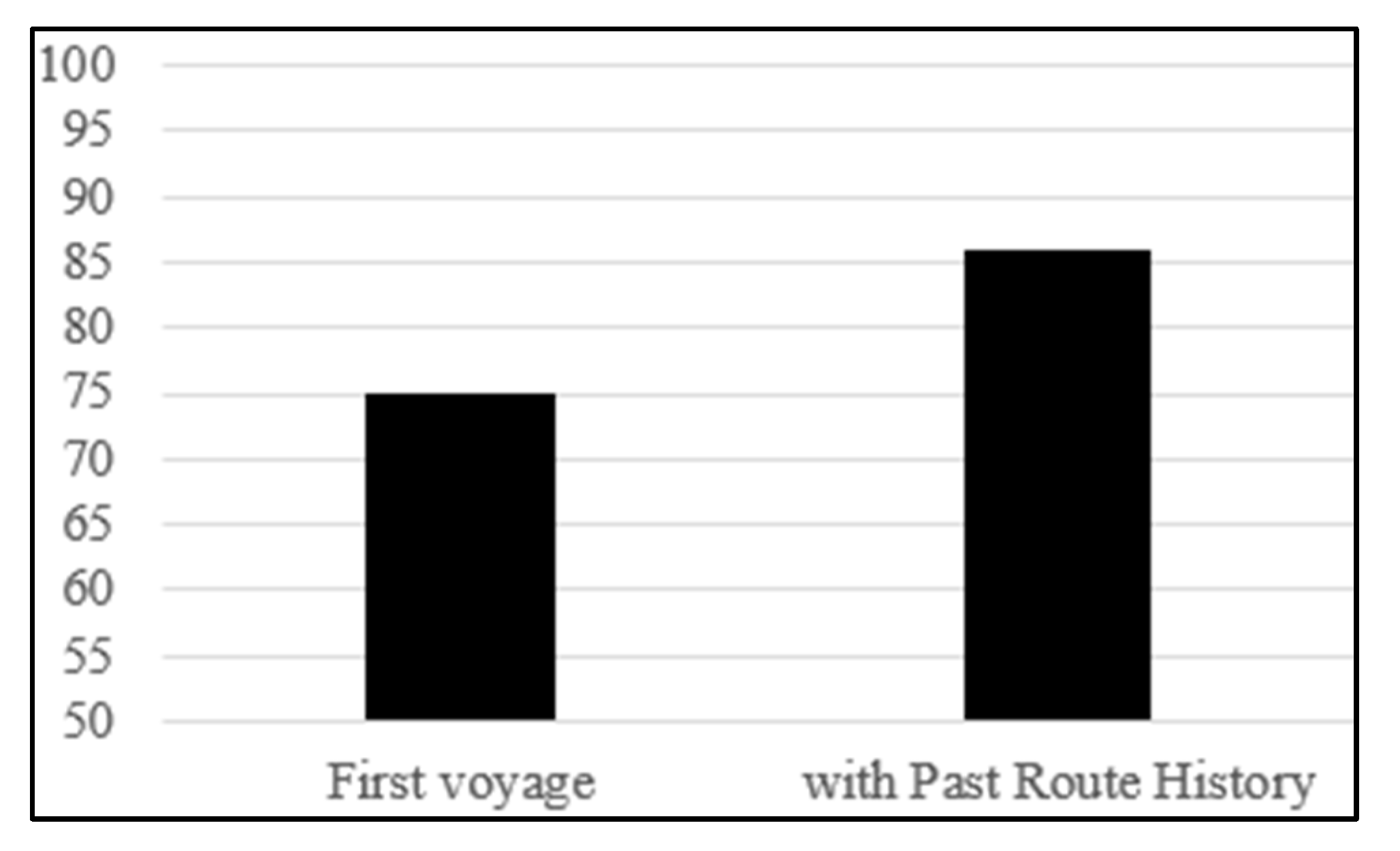
3.3. The Effects of a Ship’s Voyage History on the Congestion Forecast
3.4. AIS Historic Contribution
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Lee, S.-W.; Jo, J.; Kim, S. Leveraging the 4th Industrial Revolution Technology for Sustainable Development of the Northern Sea Route (NSR)—The Case Study of Autonomous Vessel. Sustainability 2021, 13, 8211. [Google Scholar] [CrossRef]
- Kim, S.; Yun, S.; You, Y. Eco-Friendly Speed Control Algorithm Development for Autonomous Vessel Route Planning. J. Mar. Sci. Eng. 2021, 9, 583. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Zhao, L.; Roh, M.-I. COLREGs-compliant multiship collision avoidance based on deep reinforcement learning. Ocean Eng. 2019, 191, 106436. [Google Scholar] [CrossRef]
- Brödje, A.; Lützhöft, M.; Dahlman, J. The whats, whens, whys and hows of VTS operator use of sensor information. In Proceedings of the International Conference on Human Performance at Sea, Glasgow, UK, 15 June 2010; University of Strathclyde: Glasgow, UK, 2010. [Google Scholar]
- Zhang, L.; Meng, Q.; Xiao, Z.; Fu, X. A novel ship trajectory reconstruction approach using AIS data. Ocean Eng. 2018, 159, 165–174. [Google Scholar] [CrossRef]
- Yan, Z.; Xiao, Y.; Cheng, L.; He, R.; Ruan, X.; Zhou, X.; Li, M.; Bin, R. Exploring AIS data for intelligent maritime routes extraction. Appl. Ocean. Res. 2020, 101, 102271. [Google Scholar] [CrossRef]
- Wang, L.; Chen, P.; Chen, L.; Mou, J. Ship AIS Trajectory Clustering: An HDBSCAN-Based Approach. J. Mar. Sci. Eng. 2021, 9, 566. [Google Scholar] [CrossRef]
- Zhang, L.; Meng, Q.; Fang Fwa, T.F. Big AIS Data Based Spatial-Temporal Analyses of Ship Traffic in Singapore Port Waters. Transp. Res. E 2019, 129, 287–304. [Google Scholar] [CrossRef]
- Chen, D.; Zhao, Y.; Nelson, P.; Li, Y.; Wang, X.; Zhou, Y.; Lang, J.; Guo, X. Estimating ship emissions based on AIS data for port of Tianjin, China. Atmos. Environ. 2016, 145, 10–18. [Google Scholar] [CrossRef]
- Toscano, D.; Murena, F.; Quaranta, F.; Mocerino, L. Assessment of the impact of ship emissions on air quality based on a complete annual emission inventory using AIS data for the port of Naples. Ocean Eng. 2021, 232, 109166. [Google Scholar] [CrossRef]
- Zhou, Y.; Daamen, W.; Vellinga, T.; Hoogendoorn, S.P. Impacts of wind and current on ship behavior in ports and waterways: A quantitative analysis based on AIS data. Ocean Eng. 2020, 213, 107774. [Google Scholar] [CrossRef]
- Murray, B.; Perera, L.P. An AIS-based deep learning framework for regional ship behavior prediction. Reliab. Eng. Syst. Saf. 2021, 215, 107819. [Google Scholar] [CrossRef]
- Kim, J.; Shin, K. Estimating greenhouse gas emissions from marine vessels in the port of Busan using PORT-MIS and vessel specification databases. KSCE J. Civ. Environ. Eng. Res. 2014, 34, 1251–1259. [Google Scholar] [CrossRef]
- Choi, H.R.; Park, N.K.; Kim, H.S. Development of EDI Software for the PORT-MIS. Inf. Syst. Rev. 2000, 2, 343–355. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Period |
|---|---|
| AIS 1 | 2020.01~2020.12 |
| Port MIS 2 | 2020.01~2020.12 |
| Geography Information | Static Information |
| Data | Example | Unit (Type) |
|---|---|---|
| Position | 36.25334 N, 129.24391 E | deg |
| SOG | 10 | Knot |
| COG | 30 | deg |
| MMSI | 440055930 | (Integer) |
| CALLSIGN | H9AO | (String) |
| Data | Example | Type |
|---|---|---|
| Callsign | H9AO | String |
| Inbound/outbound | Inbound | String |
| ETA (Estimated Time Arrival) | 1 September 2020 10:00 | Time |
| ETD (Estimated Time Departure) | 4 September 2020 15:01 | Time |
| Berth Place | Mb2 | String |
| Next Port | KRBUS | String |
| Previous Port | KRGSN | String |
| Area (Ak) | Accuracy Average (%) | Accuracy Standard Deviation (%) | Area (Ak) | Accuracy Average (%) | Accuracy Standard Deviation (%) |
|---|---|---|---|---|---|
| A1 | 85.0 | 0.9 | A8 | 85.0 | 0.8 |
| A2 | 84.0 | 0.9 | A9 | 85.1 | 0.8 |
| A3 | 84.9 | 0.9 | A10 | 85.0 | 0.7 |
| A4 | 85.0 | 0.8 | A11 | 84.9 | 0.6 |
| A5 | 85.2 | 0.7 | A12 | 85.0 | 0.8 |
| A6 | 84.9 | 0.8 | A13 | 85.3 | 0.8 |
| A7 | 85.1 | 1.0 | - | - | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Son, J.; Kim, D.-H.; Yun, S.-W.; Kim, H.-J.; Kim, S. The Development of Regional Vessel Traffic Congestion Forecasts Using Hybrid Data from an Automatic Identification System and a Port Management Information System. J. Mar. Sci. Eng. 2022, 10, 1956. https://doi.org/10.3390/jmse10121956
Son J, Kim D-H, Yun S-W, Kim H-J, Kim S. The Development of Regional Vessel Traffic Congestion Forecasts Using Hybrid Data from an Automatic Identification System and a Port Management Information System. Journal of Marine Science and Engineering. 2022; 10(12):1956. https://doi.org/10.3390/jmse10121956
Chicago/Turabian StyleSon, Joonbae, Dong-Ham Kim, Sang-Woong Yun, Hye-Jin Kim, and Sewon Kim. 2022. "The Development of Regional Vessel Traffic Congestion Forecasts Using Hybrid Data from an Automatic Identification System and a Port Management Information System" Journal of Marine Science and Engineering 10, no. 12: 1956. https://doi.org/10.3390/jmse10121956
APA StyleSon, J., Kim, D.-H., Yun, S.-W., Kim, H.-J., & Kim, S. (2022). The Development of Regional Vessel Traffic Congestion Forecasts Using Hybrid Data from an Automatic Identification System and a Port Management Information System. Journal of Marine Science and Engineering, 10(12), 1956. https://doi.org/10.3390/jmse10121956