
Numerical Simulation of Wave–Current Force Characteristics of Horizontal Floating Cylinder in Heave Motion

Abstract
1. Introduction
2. Numerical Model
2.1. Governing Equation
2.2. Free Surface Treatment Method
2.3. Fifth-Order Stokes Model
3. Numerical Verifications
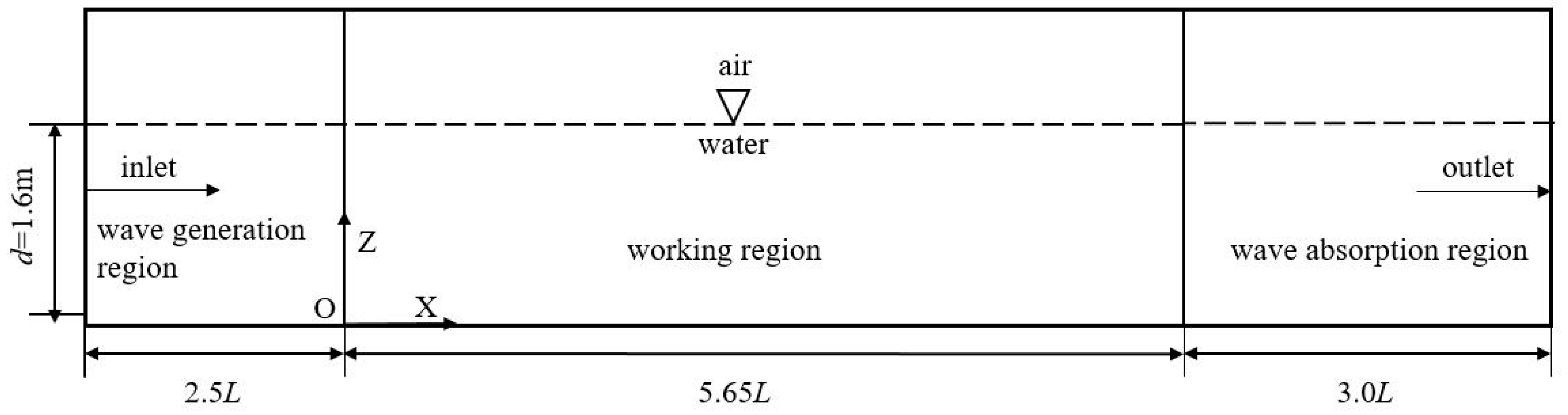
3.1. Wave Numerical Flume Verification
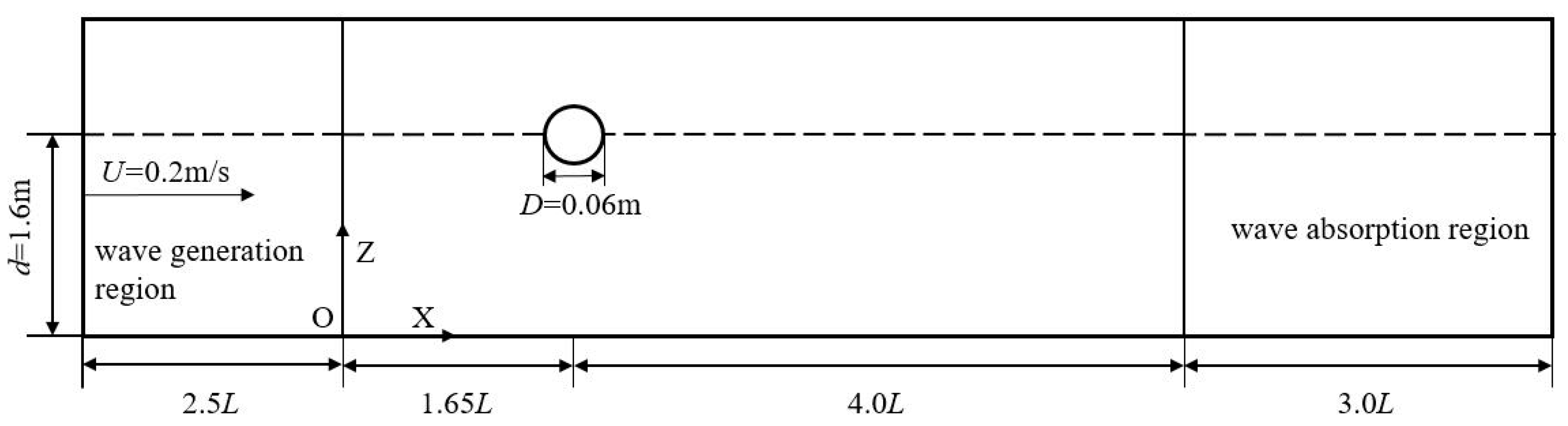
3.1.1. Wave Numerical Flume Model
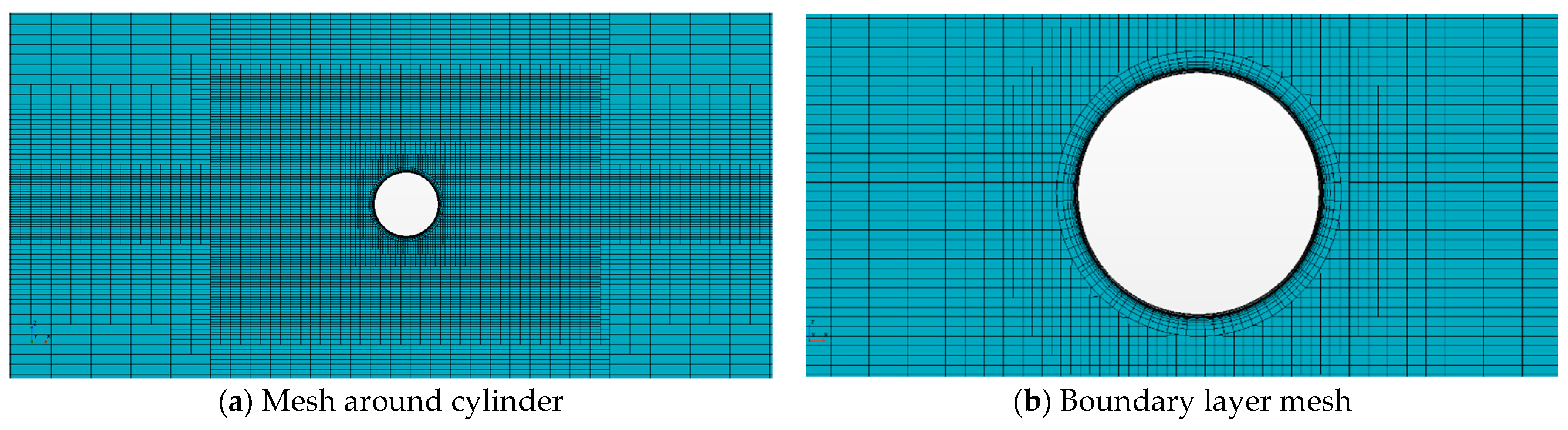
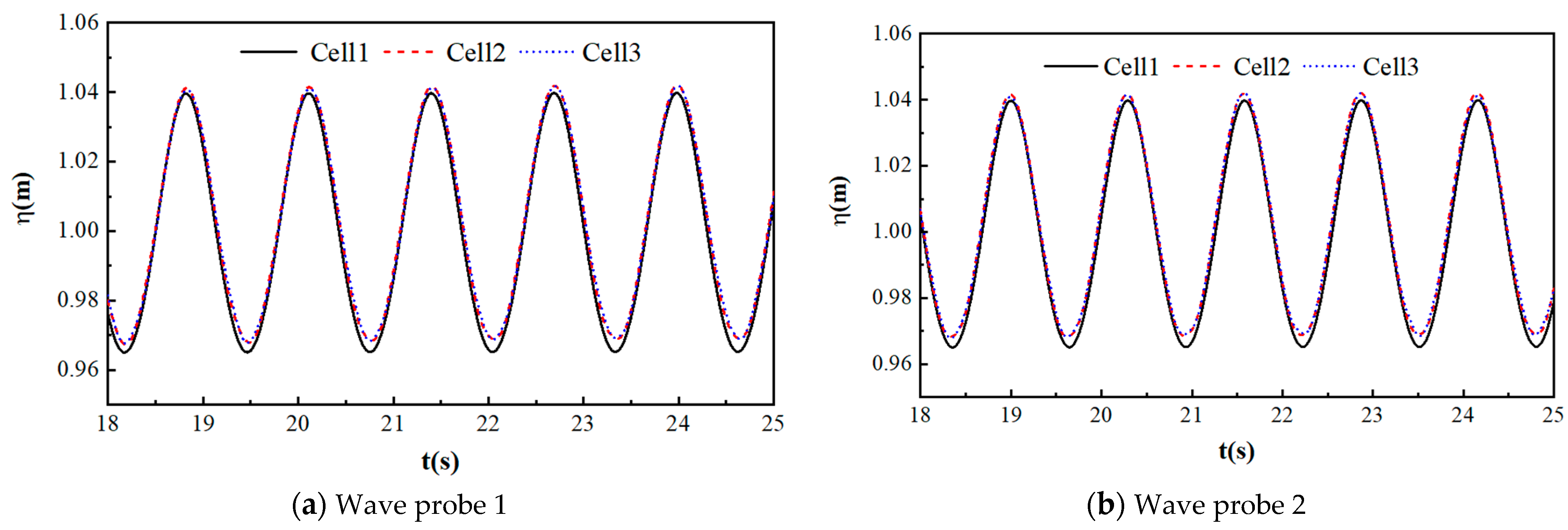
3.1.2. Mesh Convergence Analysis
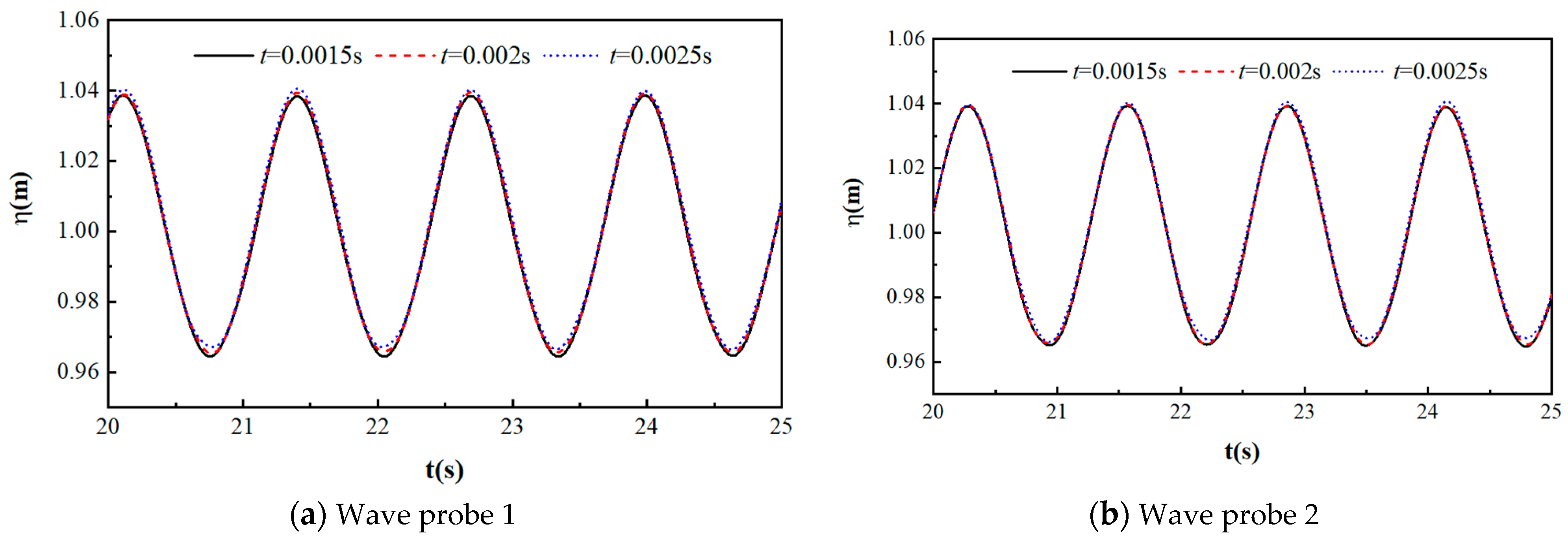
3.1.3. Time Step Convergence Analysis
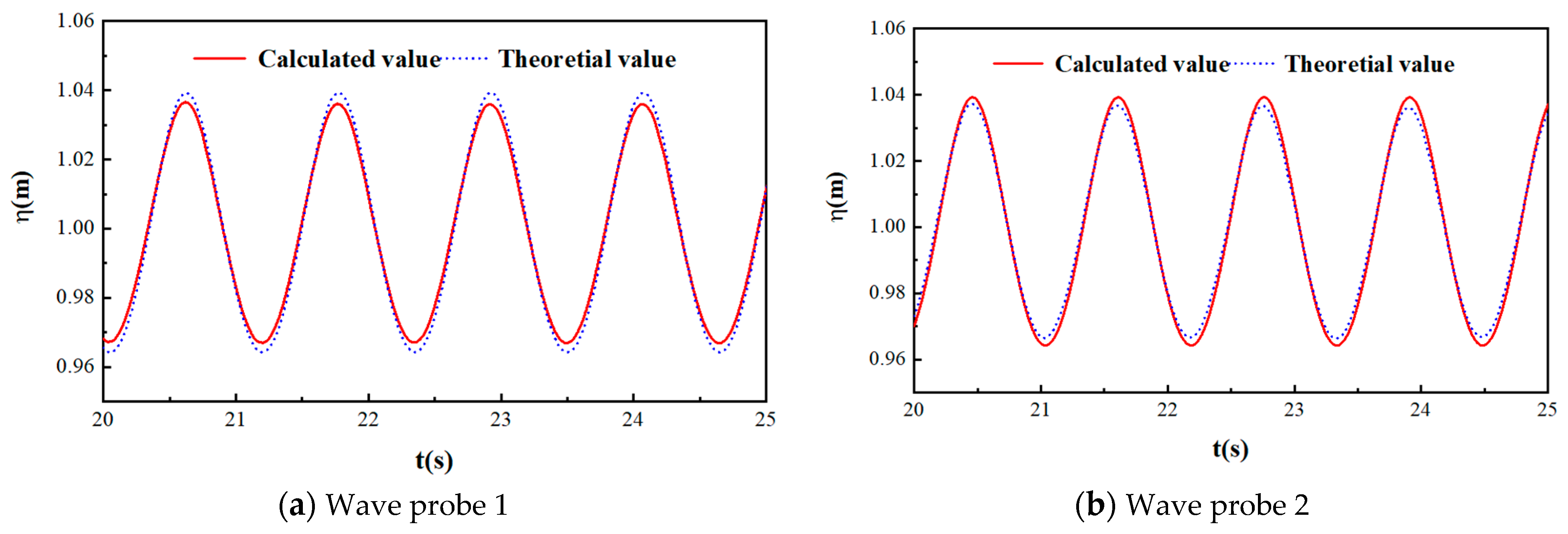
3.1.4. Comparison of Calculated Wave Value and Theoretical Value
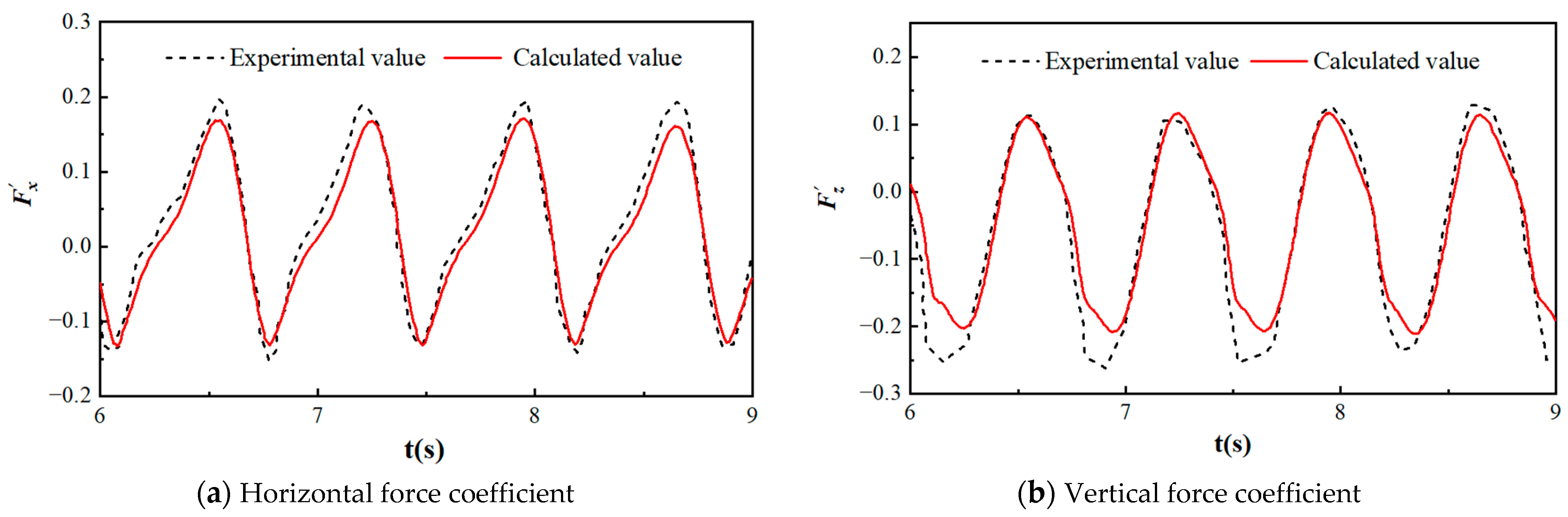
3.2. Validity Verification of Hydrodynamic Loads under Wave–Current
4. Analysis of Calculation Results
4.1. Cylinder Vibration Responses Analysis
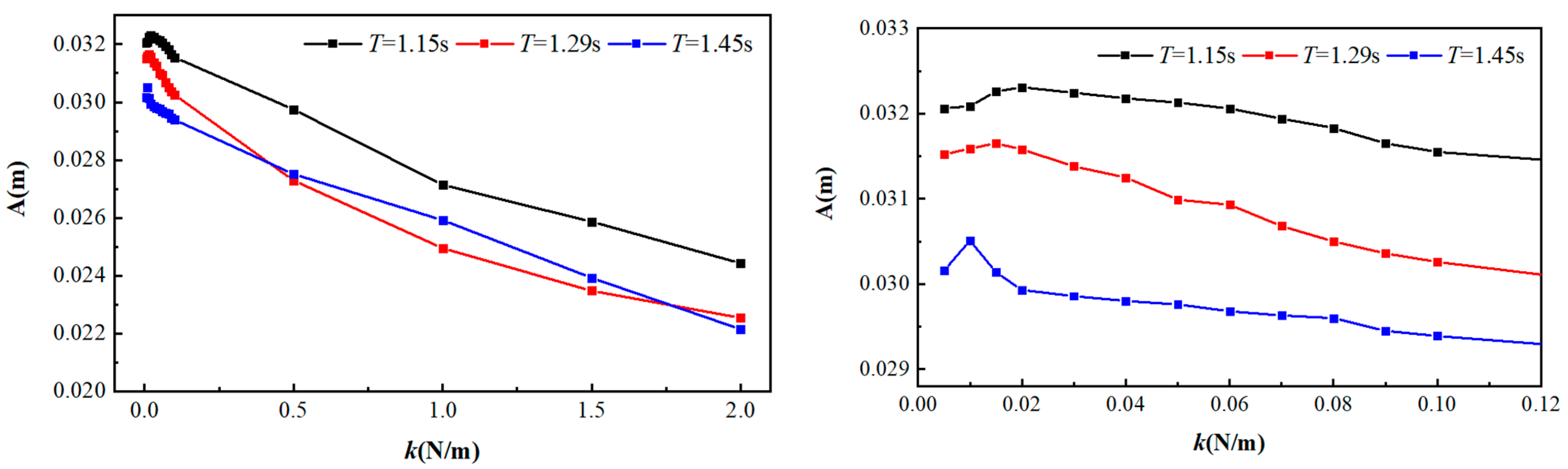
4.1.1. Vibration Responses under Different Wave Periods
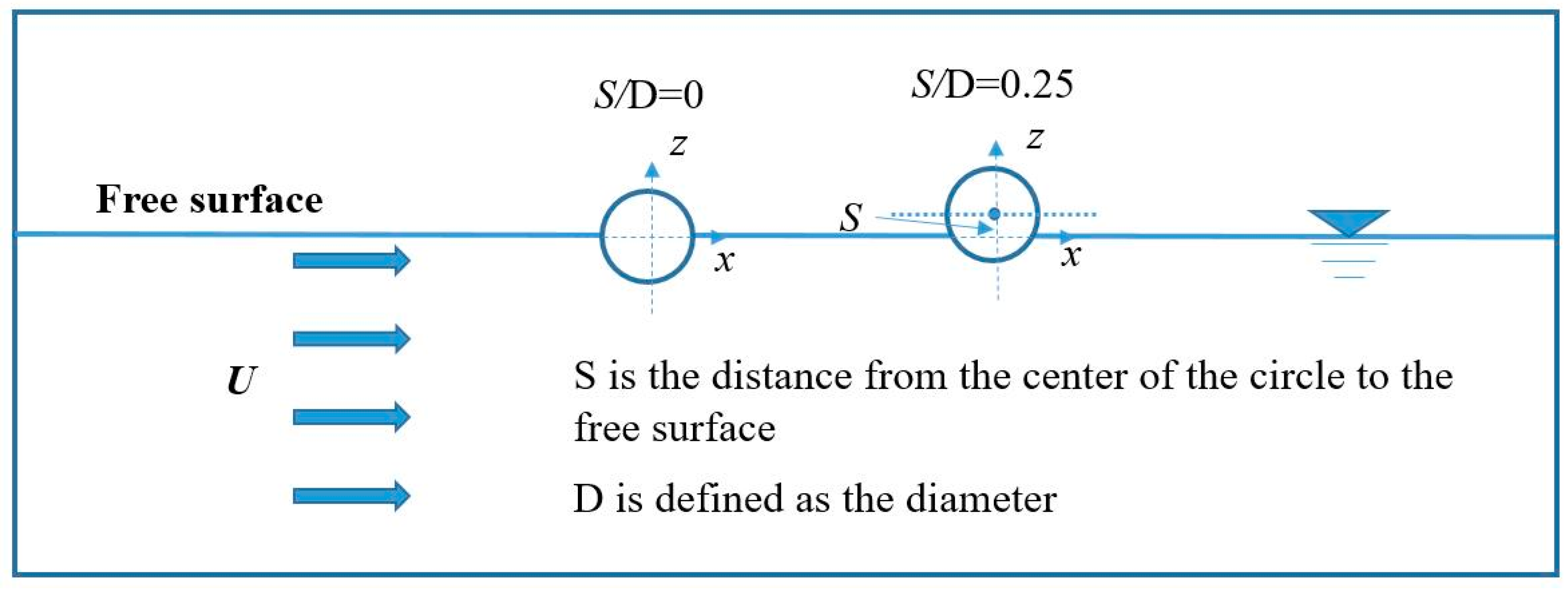
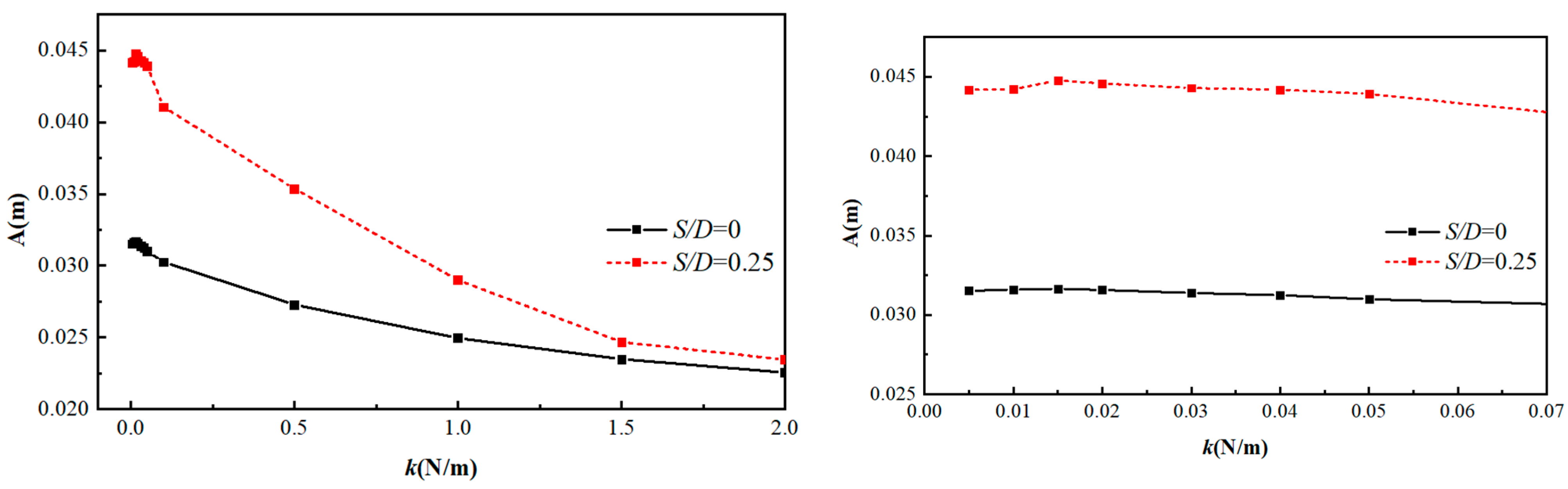
4.1.2. Vibration Responses under Different Submerged Depth
4.1.3. Vibration Responses under Different Flow Rates
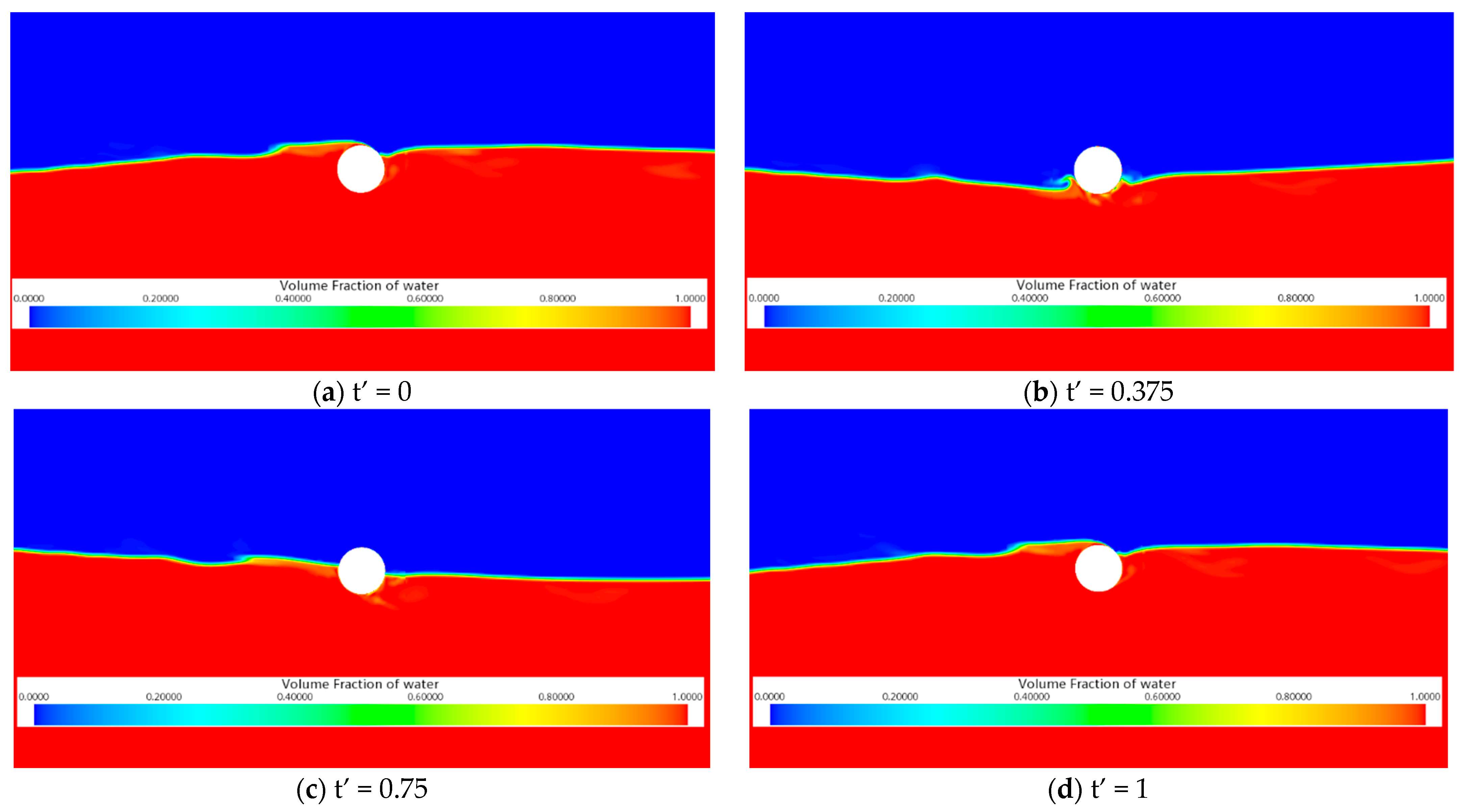
4.2. Flow Pattern
4.3. Hydrodynamic Load Analysis
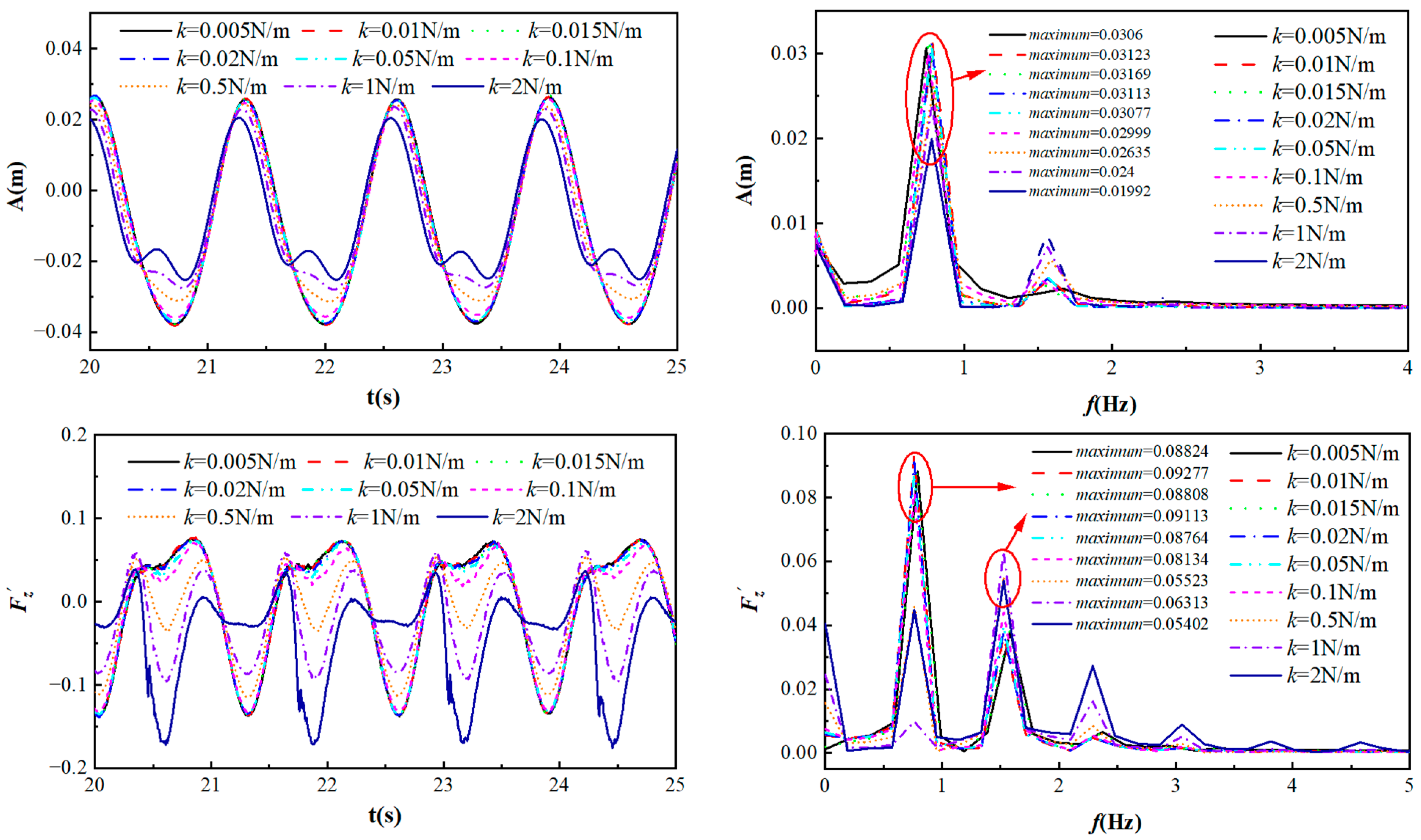
4.3.1. Analysis of Fluid Load under Different k Values
4.3.2. Analysis of Fluid Load under Different Periods
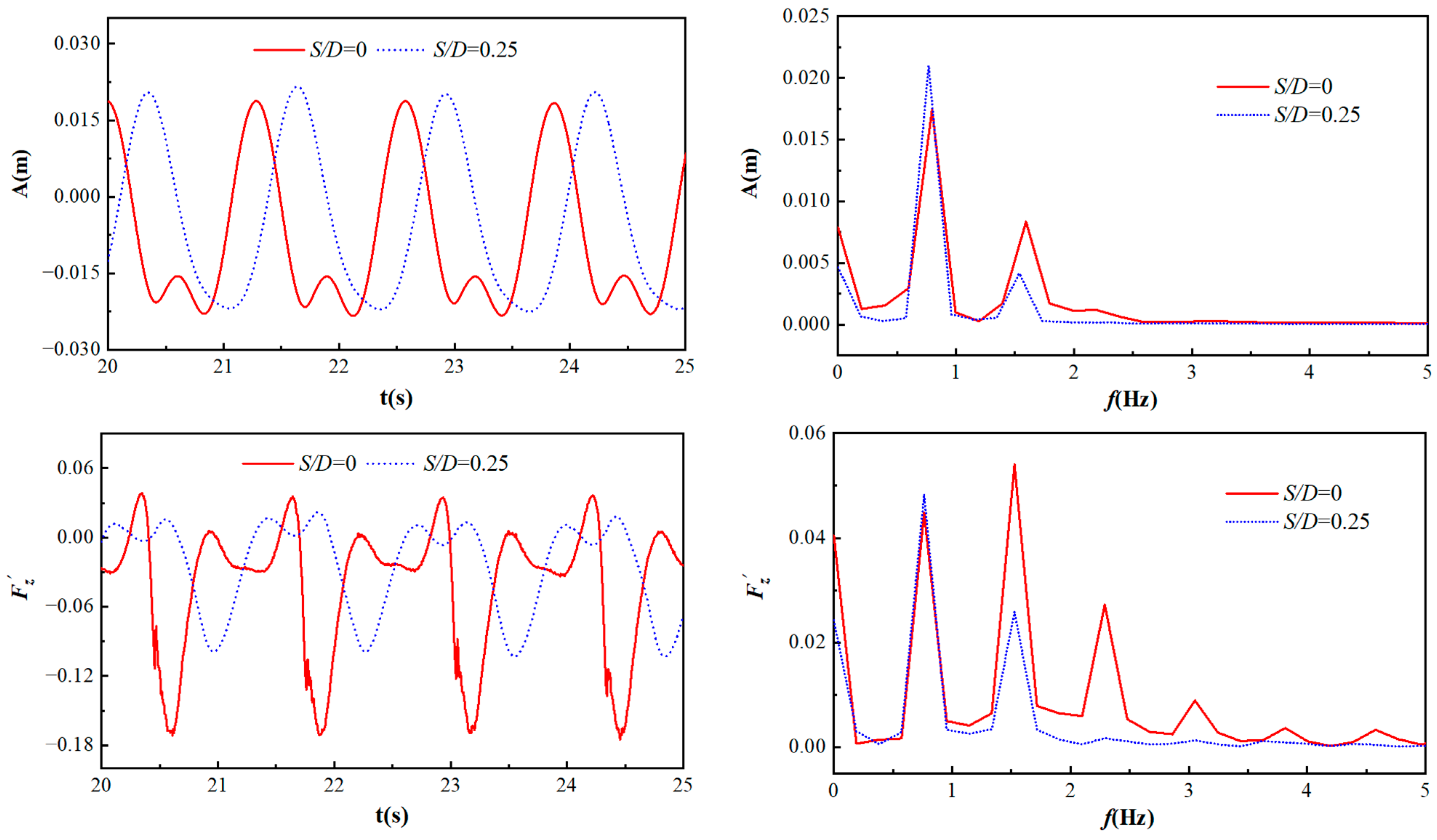
4.3.3. Analysis of Fluid Load under Different Submerged Depths
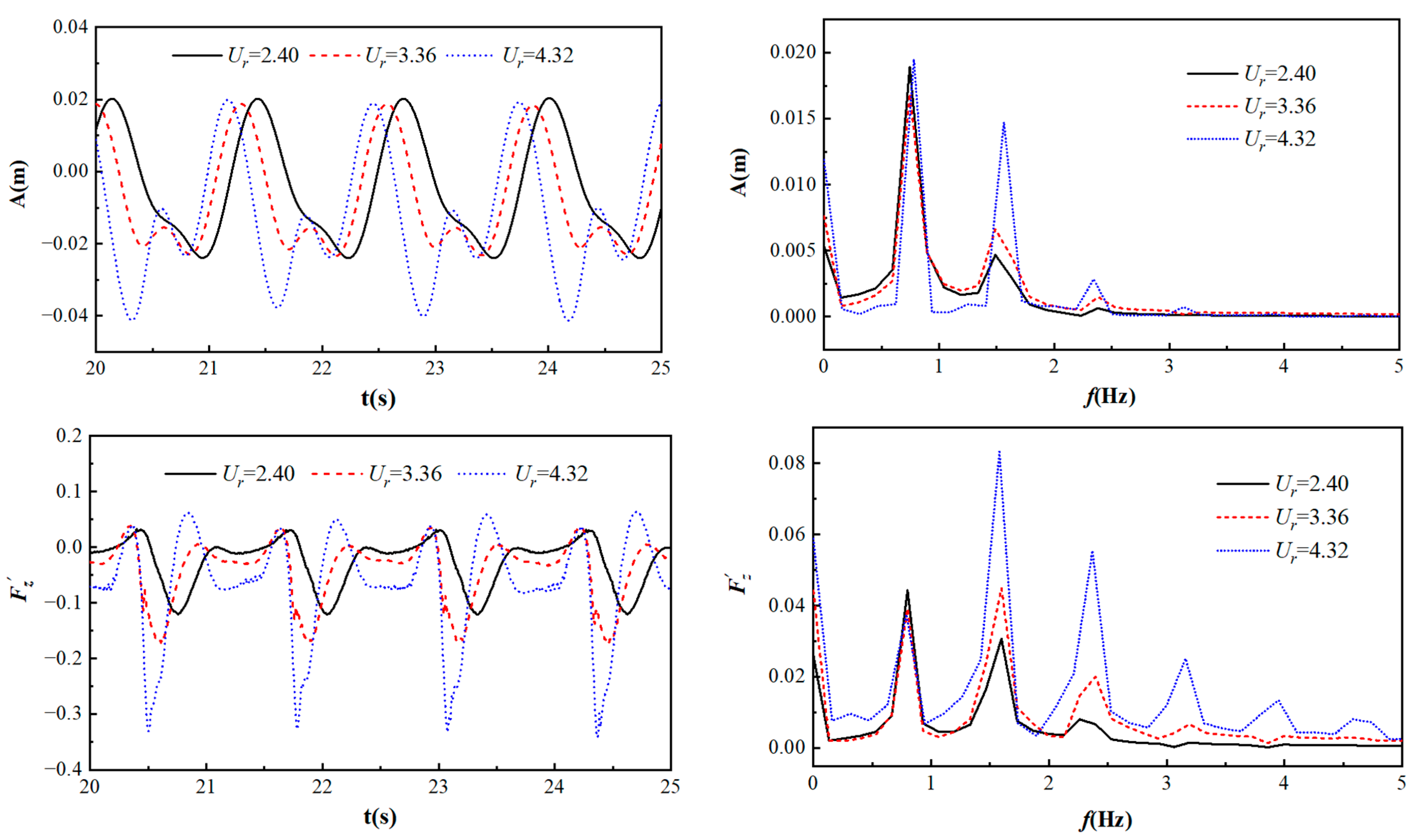
4.3.4. Analysis of Fluid Load at Different Flow Rates
5. Conclusions
- (1)
- When the vibration frequency is consistent with the wave frequency and the motion is at resonance, the vibration amplitude of the floating cylinder first increases with the decrease in k due to declining restrictions by spring stiffness. When k decreases to the values with which the vibration frequency departs from the wave frequency, the vibration amplitude decreases with the decrease in k.
- (2)
- The maximum vibration amplitude decreases with the increase in wave period when the wave amplitude and the flow rate are fixed.
- (3)
- When the cylinder is half-submerged, the effect of the current on the motion is significant, each of the vibration amplitudes is less than the wave amplitude. When a quarter is submerged, the cylinder motion is mainly affected by the wave, the vibration amplitude is larger than that of the half-submerged cylinder at each k. The maximum amplitude is greater than the wave amplitude.
- (4)
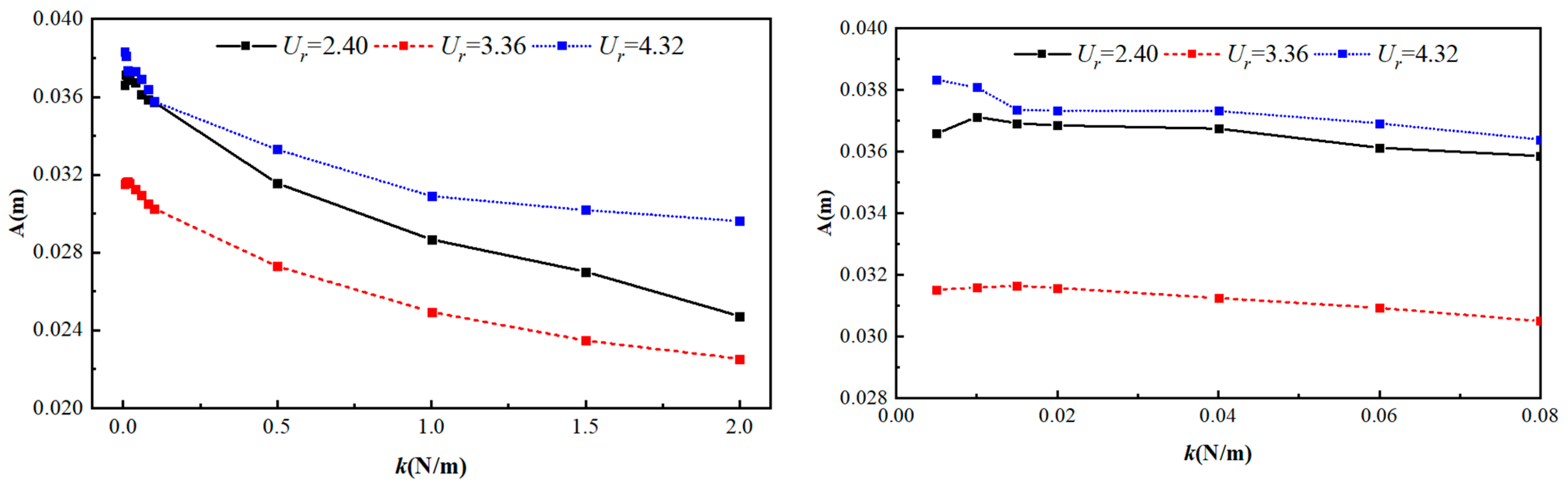
- When the wave parameters are fixed, the vibration response of the cylinder does not monotonously vary with the flow rate. The vibration amplitude reaches the minimum at a moderate flow rate for each k.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sheridan, J.; Lin, J.-C.; Rockwell, D. Flow past a cylinder close to a free surface. J. Fluid Mech. 1997, 330, 1–30. [Google Scholar] [CrossRef]
- Lin, M.Y.; Huang, L.H. Free-surface flow past a submerged cylinder. J. Hydrodyn. Ser. B 2010, 22 (Suppl. S1), 209–214. [Google Scholar] [CrossRef]
- Liang, H.; Zong, Z.; Zou, L.; Zhou, L.; Sun, L. Vortex shedding from a two-dimensional cylinder beneath a rigid wall and a free surface according to the discrete vortex method. Eur. J. Mech. 2014, 43, 110–119. [Google Scholar] [CrossRef]
- Chung, M.-H. Two-degree-of-freedom vortex induced vibration of low-mass horizontal circular cylinder near a free surface at low Reynolds number. Int. J. Heat Fluid Flow 2016, 57, 58–78. [Google Scholar] [CrossRef]
- Capell, N.A.; Carlson, D.W.; Modarres-Sadeghi, Y. Vortex-induced vibration of a single degree-of-freedom flexibly-mounted horizontal cylinder near the free surface. J. Sound Vib. 2019, 444, 161–175. [Google Scholar] [CrossRef]
- Díaz-Ojeda, H.R.; González, L.M.; Huera-Huarte, F.J. On the influence of the free surface on a stationary circular cylinder with a flexible splitter plate in laminar regime. J. Fluids Struct. 2019, 87, 102–123. [Google Scholar] [CrossRef]
- Ma, L.; Resvanis, T.L.; Vandiver, J.K. The influence of mode dominance and traveling waves on flexible cylinder flow-induced vibration. Ocean Eng. 2022, 264, 111750. [Google Scholar] [CrossRef]
- Li, Y.; Lin, M. Hydrodynamic coefficients induced by waves and currents for submerged circular cylinder. Procedia Eng. 2010, 4, 253–261. [Google Scholar] [CrossRef]
- Xiao, H.; Huang, W.; Tao, J.; Liu, C. Numerical modeling of wave–current forces acting on horizontal cylinder of marine structures by VOF method. Ocean Eng. 2013, 67, 58–67. [Google Scholar] [CrossRef]
- Ning, D.Z.; Lin, H.X.; Teng, B.; Zou, Q.P. Higher harmonics induced by waves propagating over a submerged obstacle in the presence of uniform current. China Ocean Eng. 2014, 28, 725–738. [Google Scholar] [CrossRef]
- Hu, K.; Fu, S.X.; Xu, Y.W.; Ma, L.X. Experimental research about hydrodynamic characteristics of horizontal cylinder under different draft. J. Ship Mech. 2017, 21, 1190–1198. [Google Scholar]
- Bai, J.; Ma, N.; Gu, X. Wave-current loads on the horizontal cylinder with varying submergence depths. J. Shanghai Jiao Tong Univ. 2018, 52, 938–945. [Google Scholar]
- Bai, J.; Ma, N.; Gu, X. Study of interaction between wave-current and the horizontal cylinder located near the free surface. Appl. Ocean Res. 2017, 67, 44–58. [Google Scholar] [CrossRef]
- Ghadirian, A.; Vested, M.H.; Carstensen, S.; Christiensen, E.D.; Bredmose, H. Wave-current interaction effects on waves and their loads on a vertical cylinder. Coast. Eng. 2021, 165, 103832. [Google Scholar] [CrossRef]
- Wang, S.D.; Wei, G.; Du, H.; Wang, X.L.; Xu, J.N. Experimental investigation on the three-dimensional oblique interaction of an internal solitary wave with a horizontal finite-length cylinder. Ocean Eng. 2022, 111, 58–67. [Google Scholar] [CrossRef]
- Saincher, S.; Sriram, V. Experimental investigation of hydrodynamic loading induced by regular, steep non-breaking and breaking focused waves on a fixed and moving cylinder. Ocean Eng. 2022, 111, 212–235. [Google Scholar] [CrossRef]
- Zhao, Y.P.; Chen, Q.P.; Bi, C.W. Numerical investigation of nonlinear wave loads on a trestle-netting enclosure aquaculture facility. Ocean Eng. 2022, 257, 52–65. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, W.; Wan, D. CFD study of wave interaction with single and two tandem circular cylinders. Ocean Eng. 2021, 239, 109855. [Google Scholar] [CrossRef]
- CD-Adapco. STAR-CCM+ User Guide, Version 12.06; CD-Adapco: Melville, NY, USA, 2017.
- Fenton, J.D. A fifth-order Stokes theory for steady waves. J. Waterw. Port Coast. Ocean Eng. 1985, 111, 216–234. [Google Scholar] [CrossRef]
- Skjelbreia, L.; Hendrickson, J. Fifth order gravity wave theory. In Proceedings of the 7th Conference of Coastal Engineer, The Hague, The Netherlands, 1960; pp. 184–196. [Google Scholar]
- Dixon, A.G.; Greated, C.A.; Salter, S.H. Wave forces on partially submerged cylinders. J. Waterw. Port Coast. Ocean Div. 1979, 105, 421–438. [Google Scholar] [CrossRef]
- Li, B.H.; Zheng, X.Y.; Li, W.; Rong, W.D. Numerical generation of Stokes fifth order waves in wave flume. J. Wuhan Univ. Technol. (Transp. Sci. Eng.) 2016, 40, 238–244. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cell | Number of Cells in the Wavelength Range | Number of Cells in the Wave Height Range | Total Number of Cells in 2D |
|---|---|---|---|
| 1 | 80 | 10 | 1.31 × 105 |
| 2 | 100 | 20 | 1.9 × 105 |
| 3 | 120 | 25 | 2.1 × 105 |
| T | Ur | U | k | S/D |
|---|---|---|---|---|
| 1.15 | 3.36 | 0.35 | 2 | 0 |
| 1.29 | 2.40 | 0.25 | 2 | 0 |
| 3.36 | 0.35 | 0~2 | 0 | |
| 0.25 | ||||
| 4.32 | 0.45 | 2 | 0 | |
| 1.45 | 3.36 | 0.35 | 2 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Jiang, Q.; Wang, Y.; Chen, L.; Wang, S.; Wang, K. Numerical Simulation of Wave–Current Force Characteristics of Horizontal Floating Cylinder in Heave Motion. J. Mar. Sci. Eng. 2022, 10, 1884. https://doi.org/10.3390/jmse10121884
Zhou X, Jiang Q, Wang Y, Chen L, Wang S, Wang K. Numerical Simulation of Wave–Current Force Characteristics of Horizontal Floating Cylinder in Heave Motion. Journal of Marine Science and Engineering. 2022; 10(12):1884. https://doi.org/10.3390/jmse10121884
Chicago/Turabian StyleZhou, Xiaoguo, Qingdian Jiang, Yan Wang, Linfeng Chen, Shuqi Wang, and Kunpeng Wang. 2022. "Numerical Simulation of Wave–Current Force Characteristics of Horizontal Floating Cylinder in Heave Motion" Journal of Marine Science and Engineering 10, no. 12: 1884. https://doi.org/10.3390/jmse10121884
APA StyleZhou, X., Jiang, Q., Wang, Y., Chen, L., Wang, S., & Wang, K. (2022). Numerical Simulation of Wave–Current Force Characteristics of Horizontal Floating Cylinder in Heave Motion. Journal of Marine Science and Engineering, 10(12), 1884. https://doi.org/10.3390/jmse10121884