High-Resolution Multisensor Remote Sensing to Support Date Palm Farm Management



Abstract
:1. Introduction
2. Materials and Methods
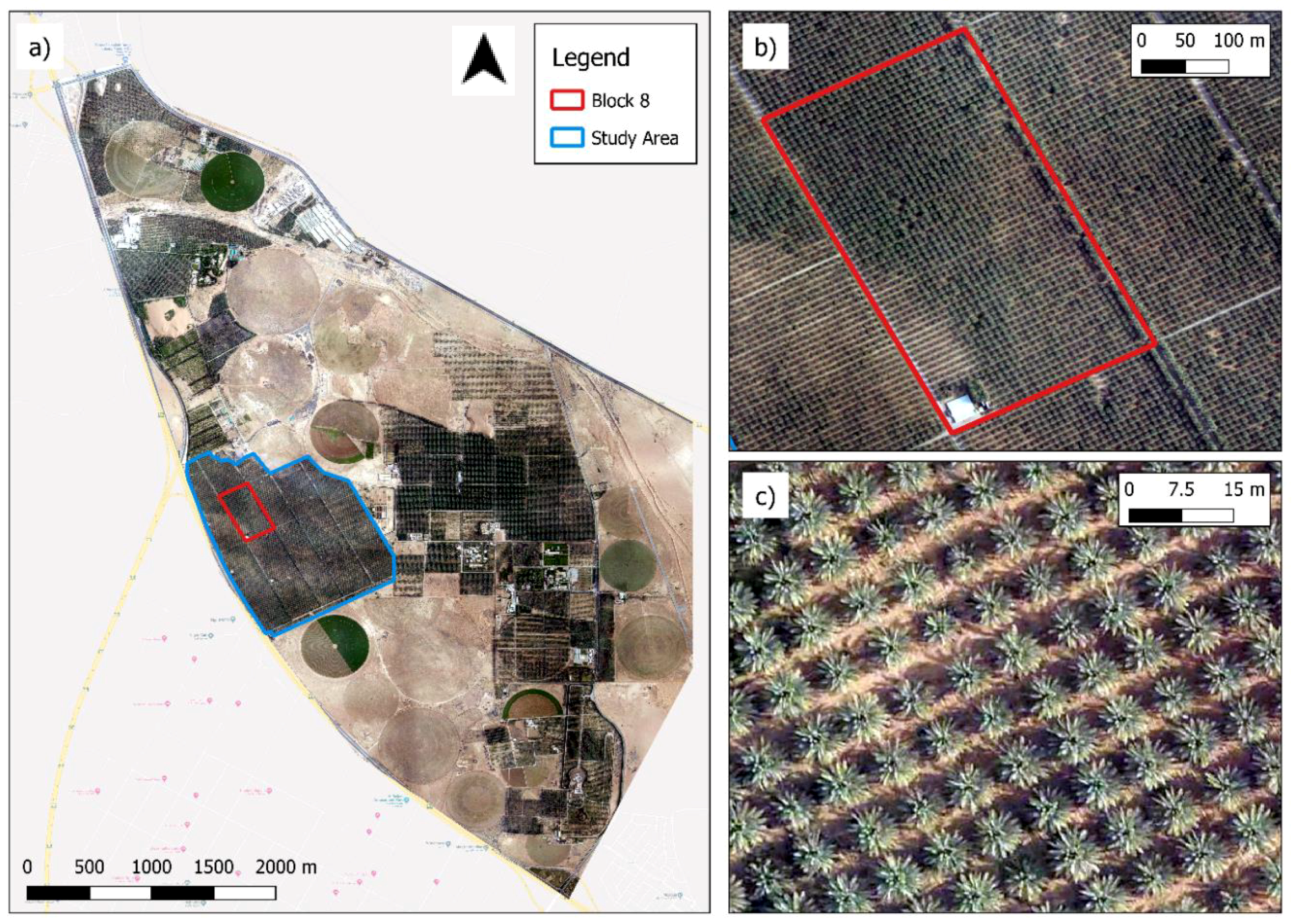
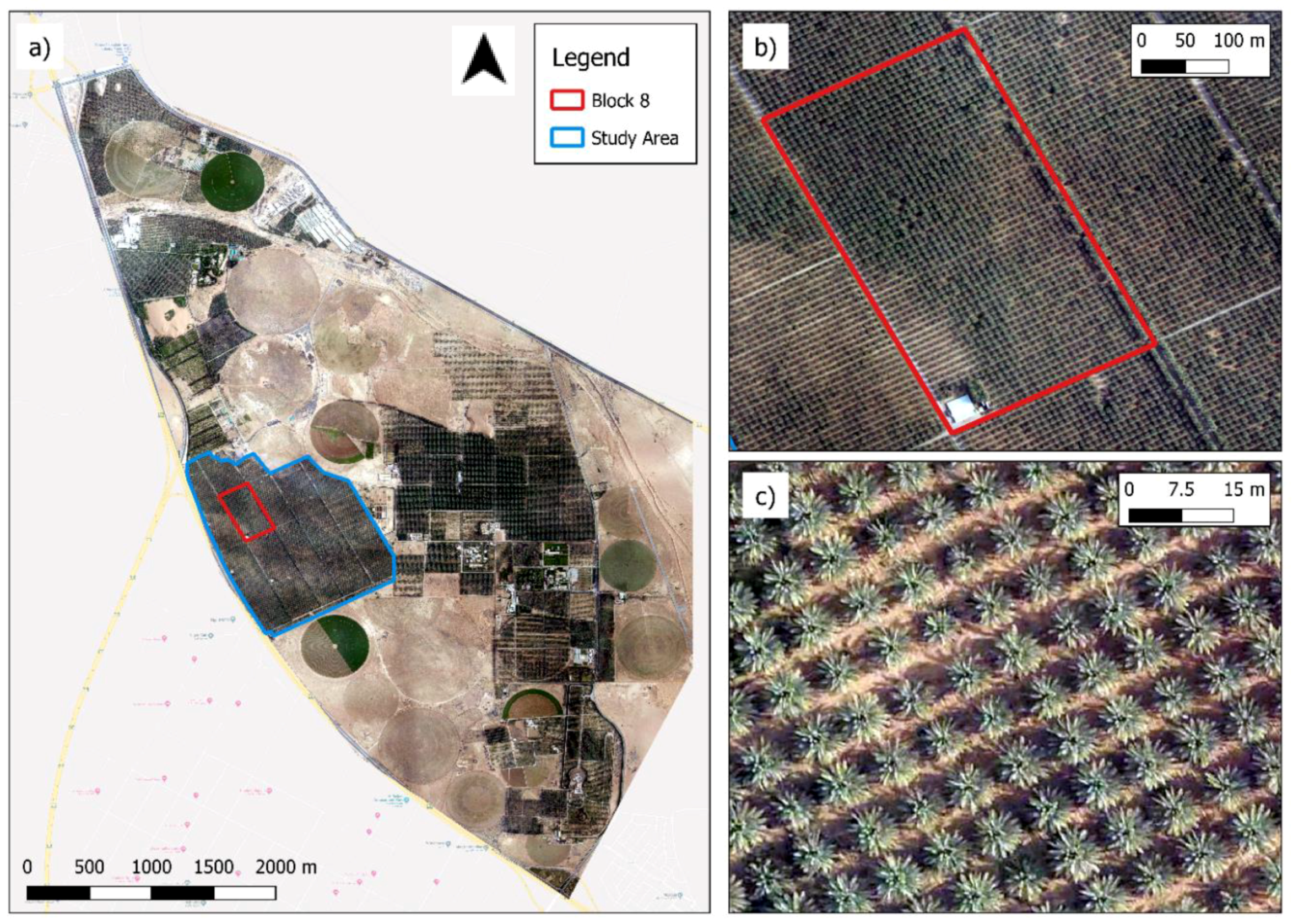
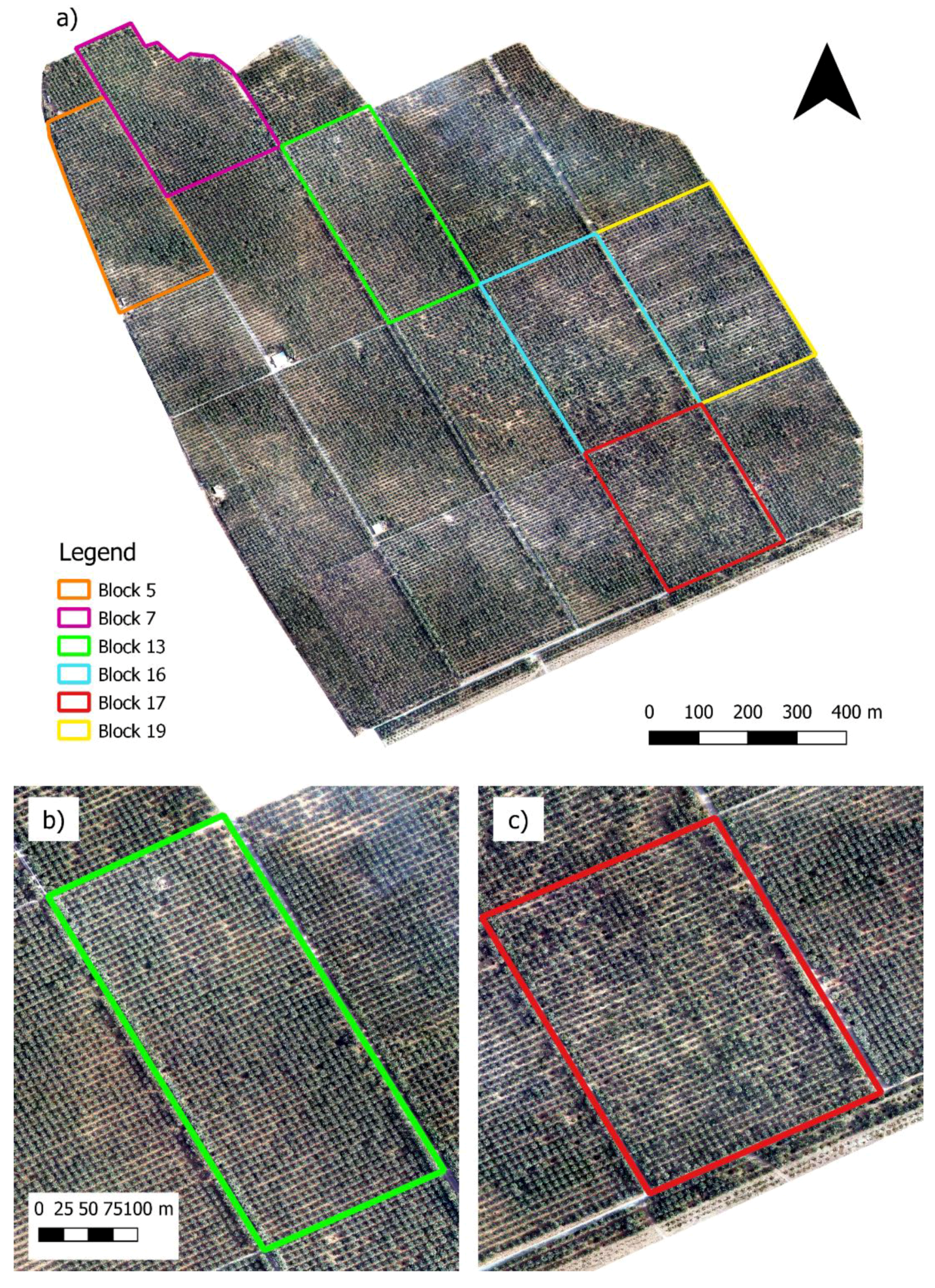
2.1. Study Area and Data Description
2.2. Methodology
2.2.1. Preprocessing
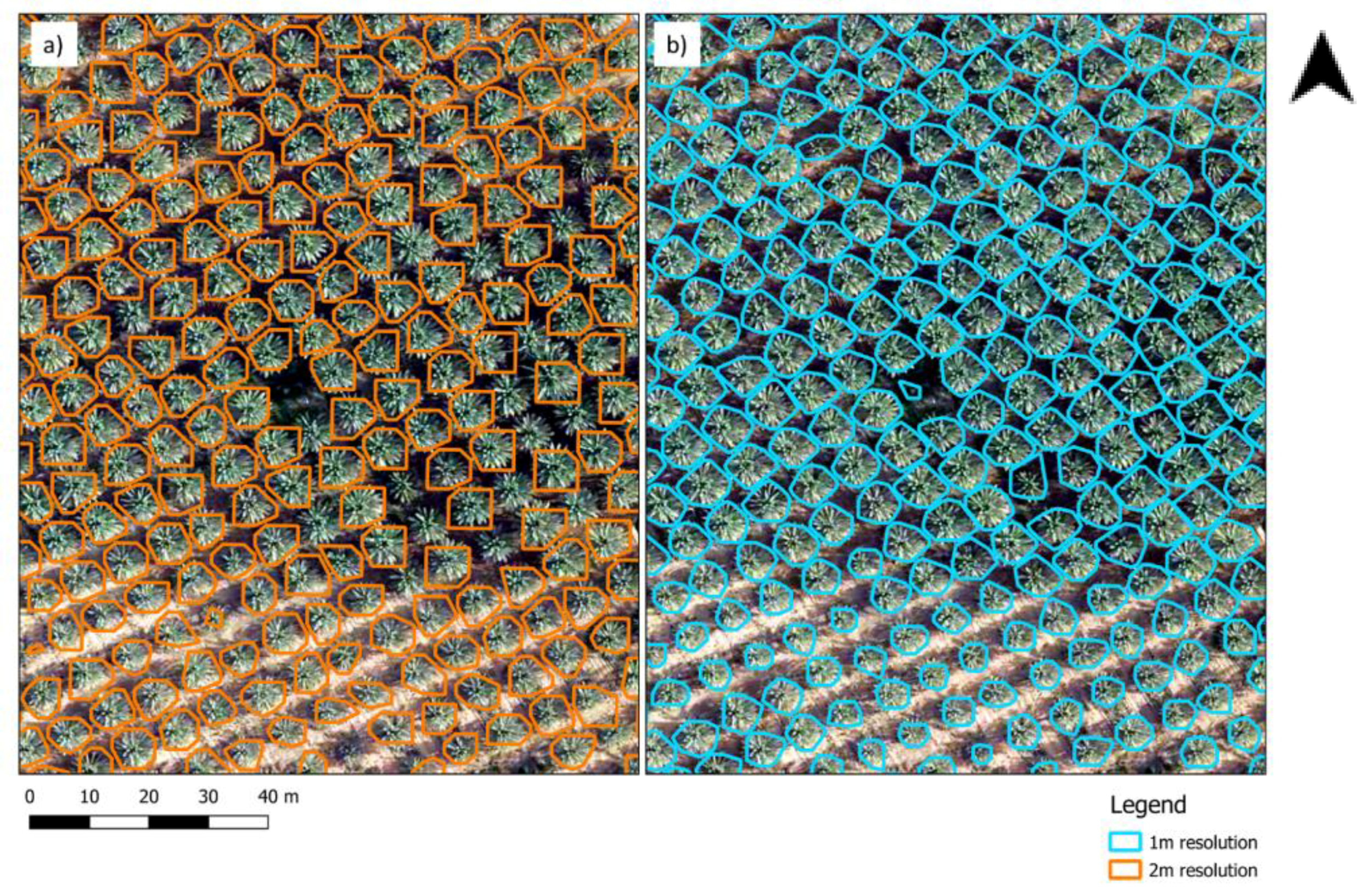
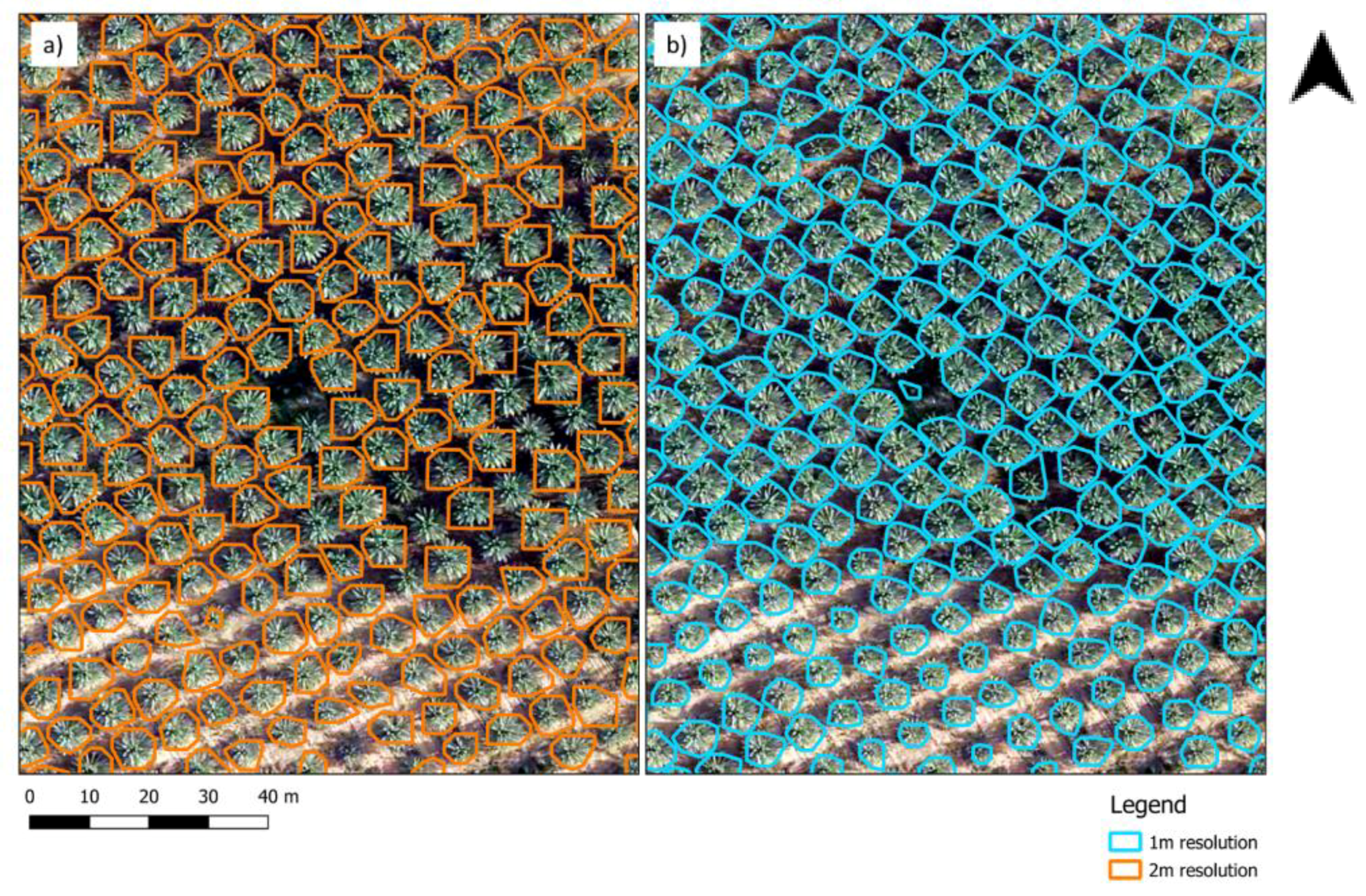
2.2.2. Identification of Blocks and Trees
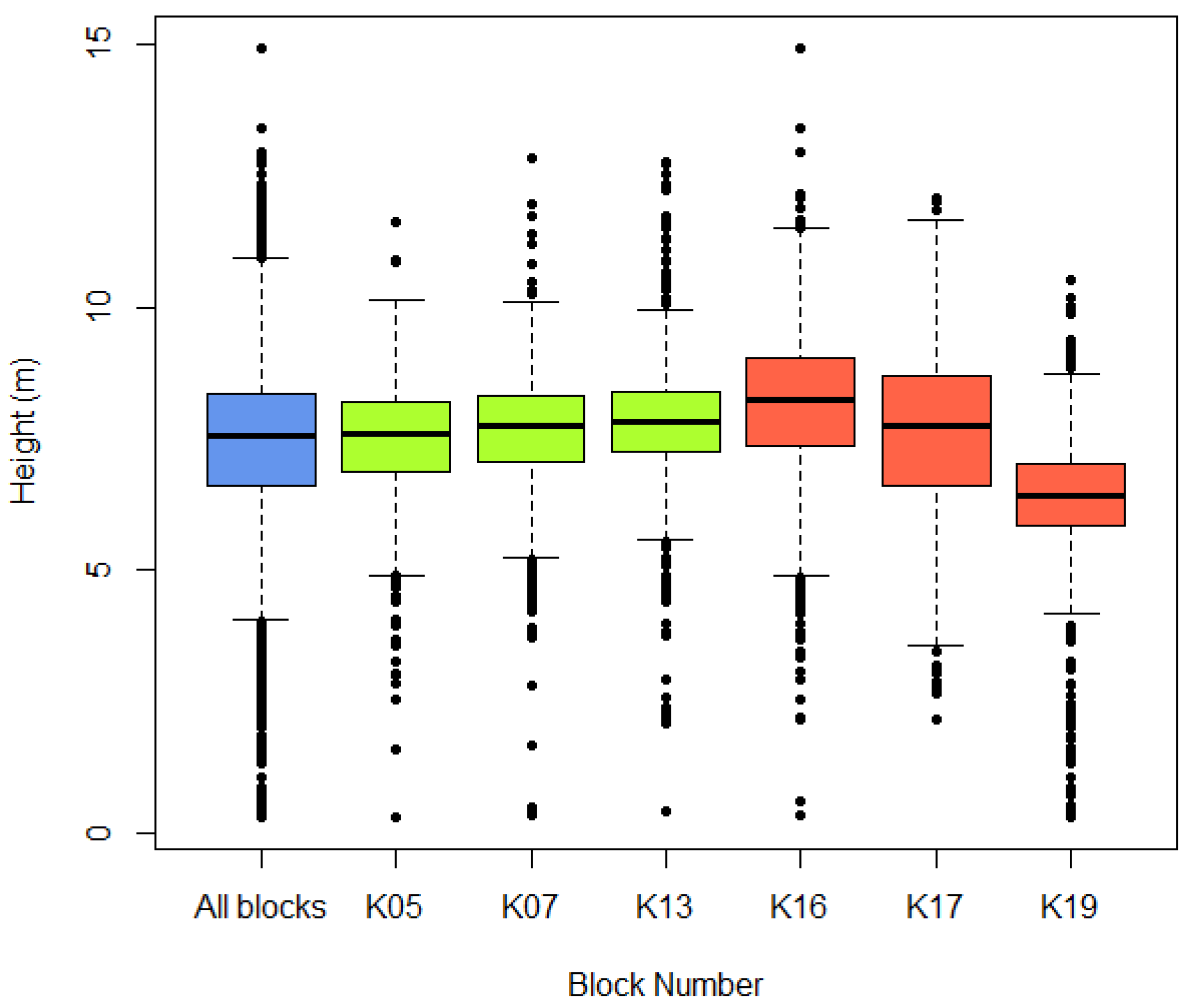
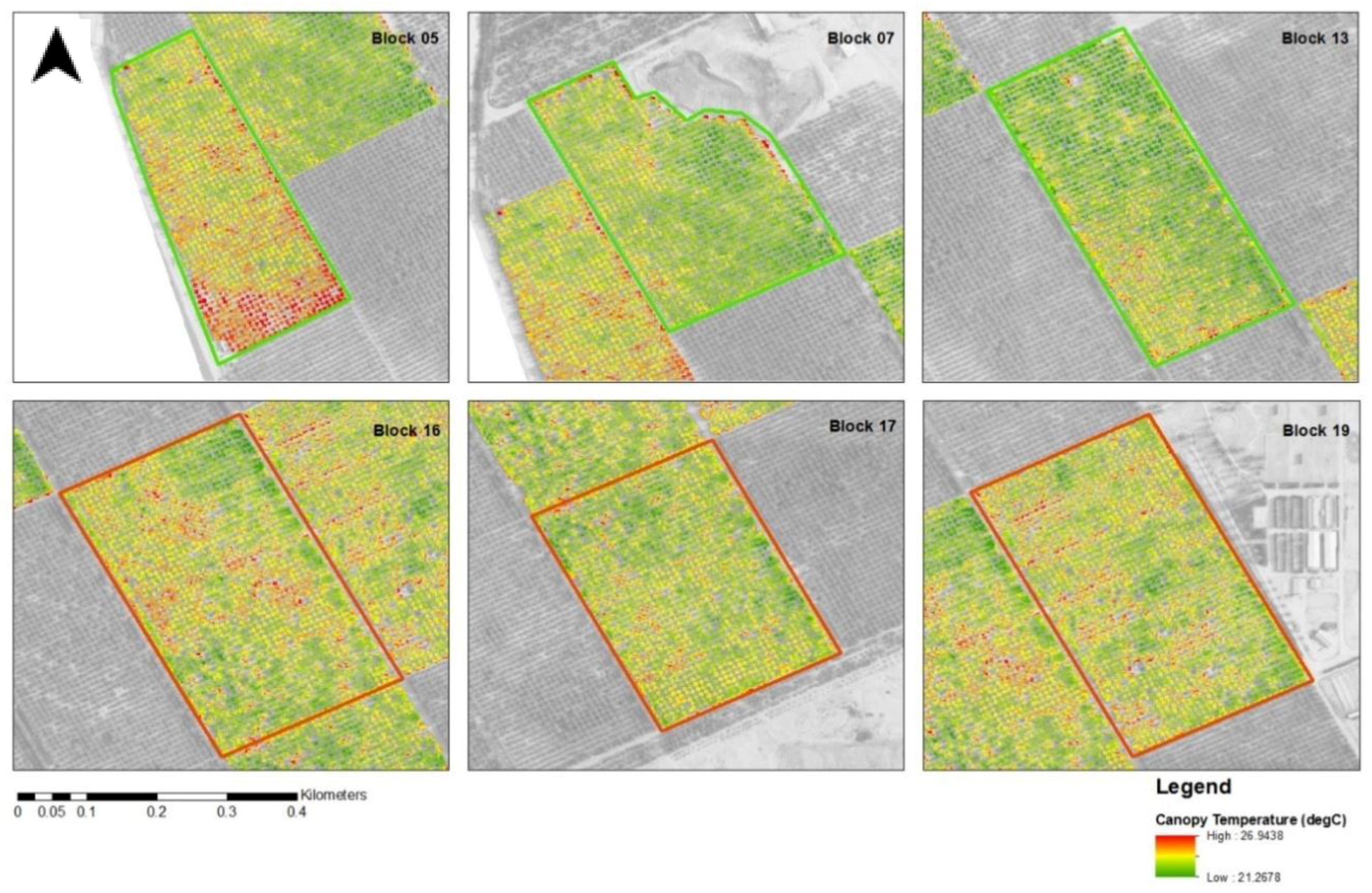
2.2.3. Block-Level Analysis
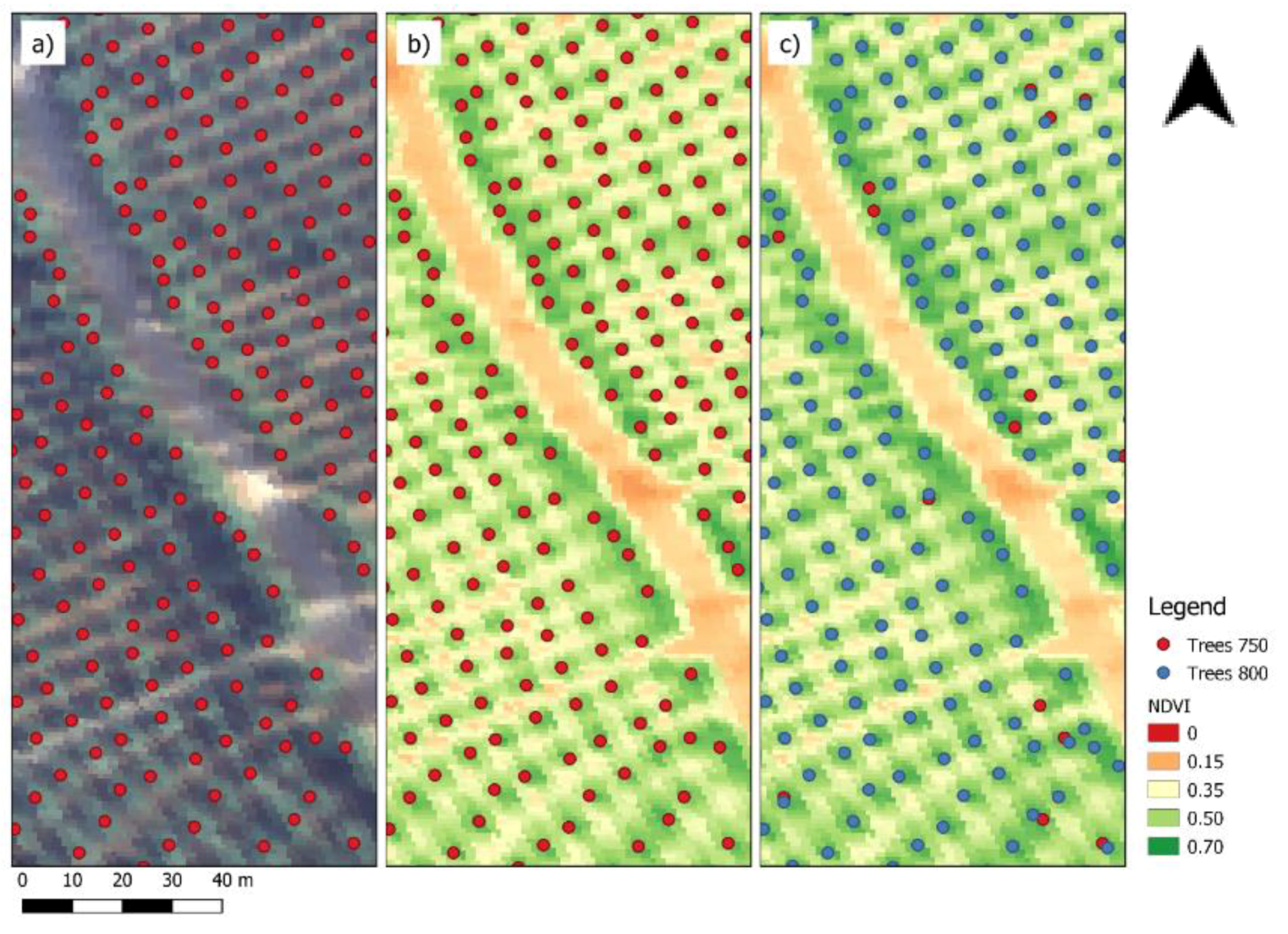
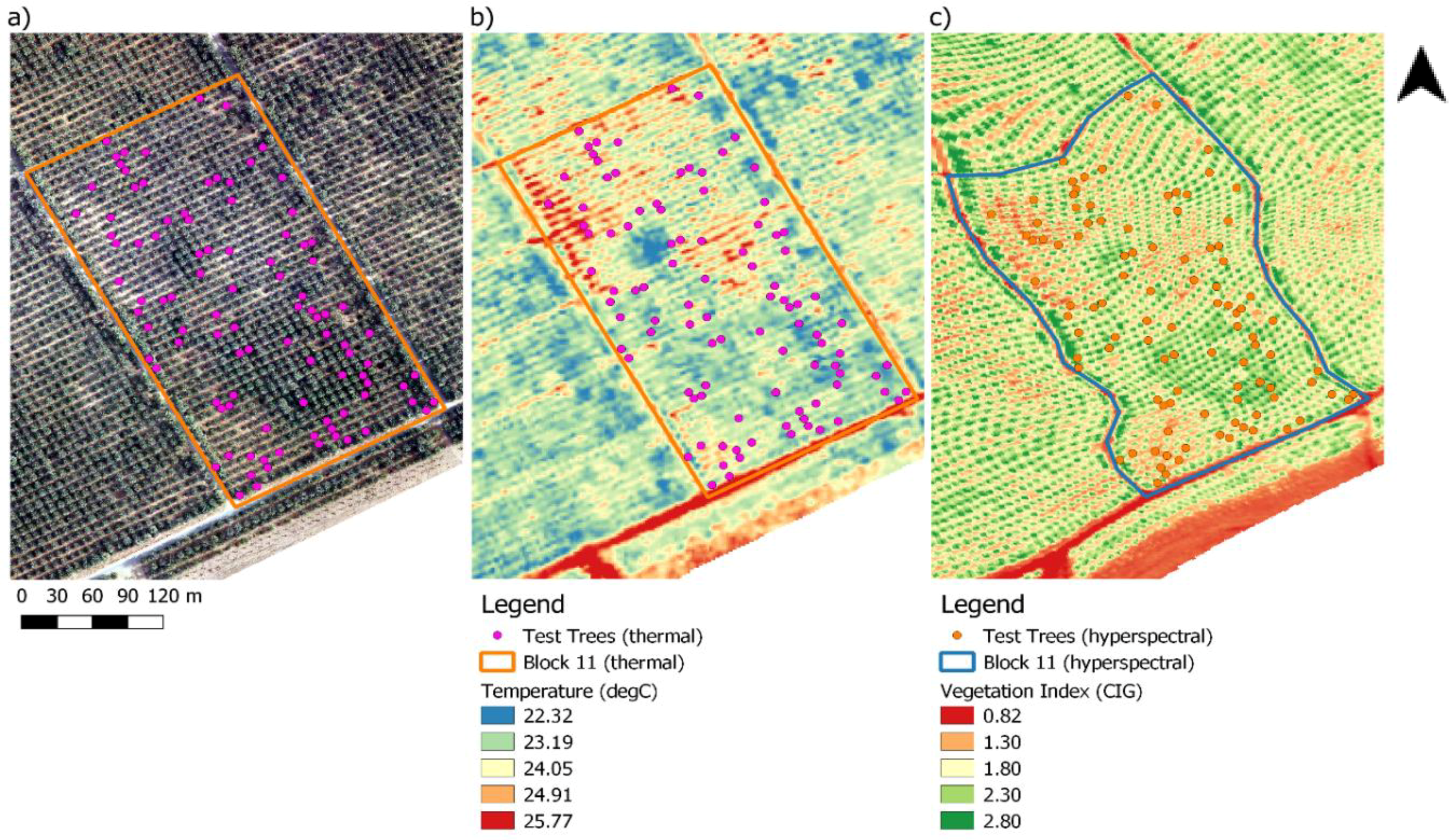
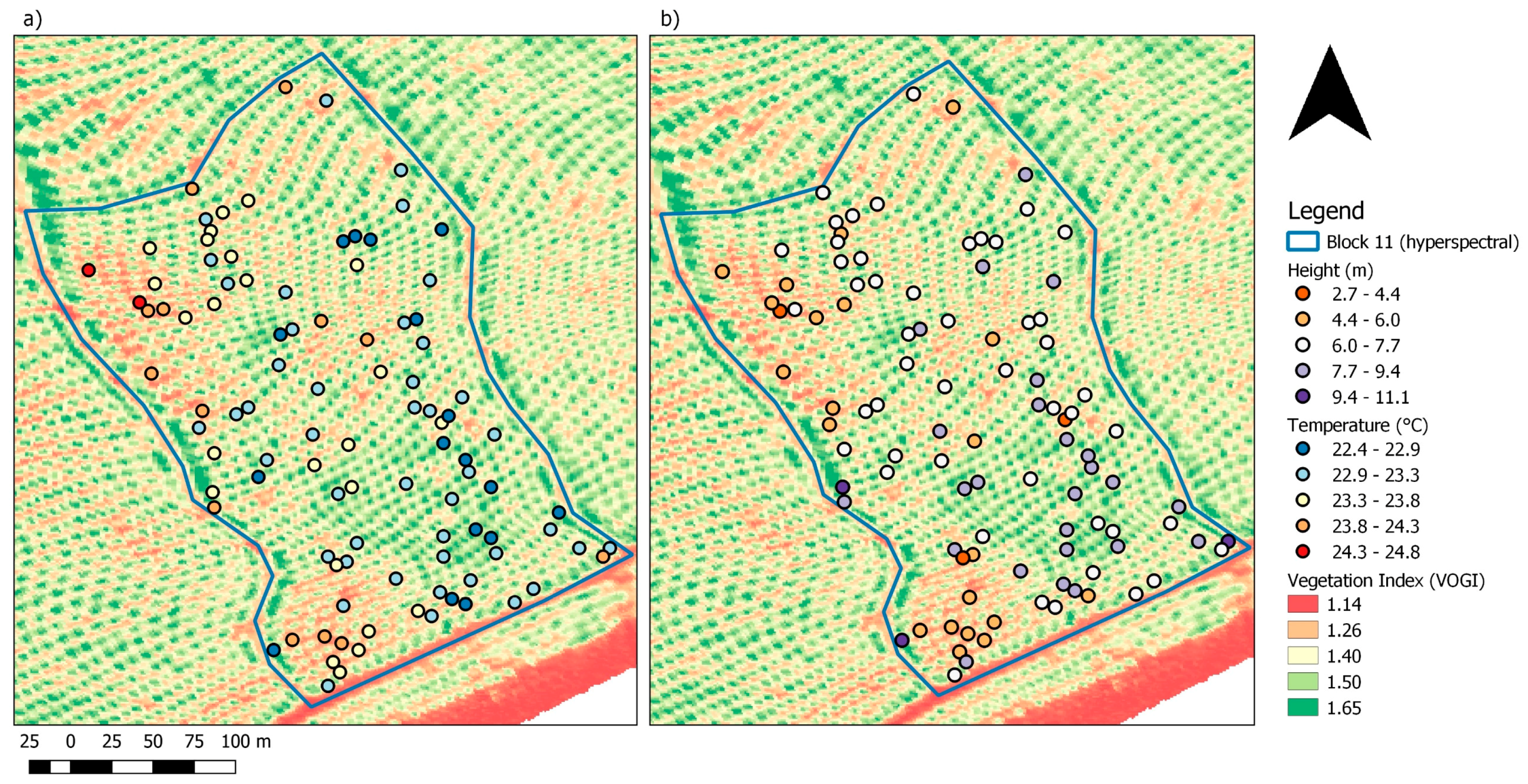
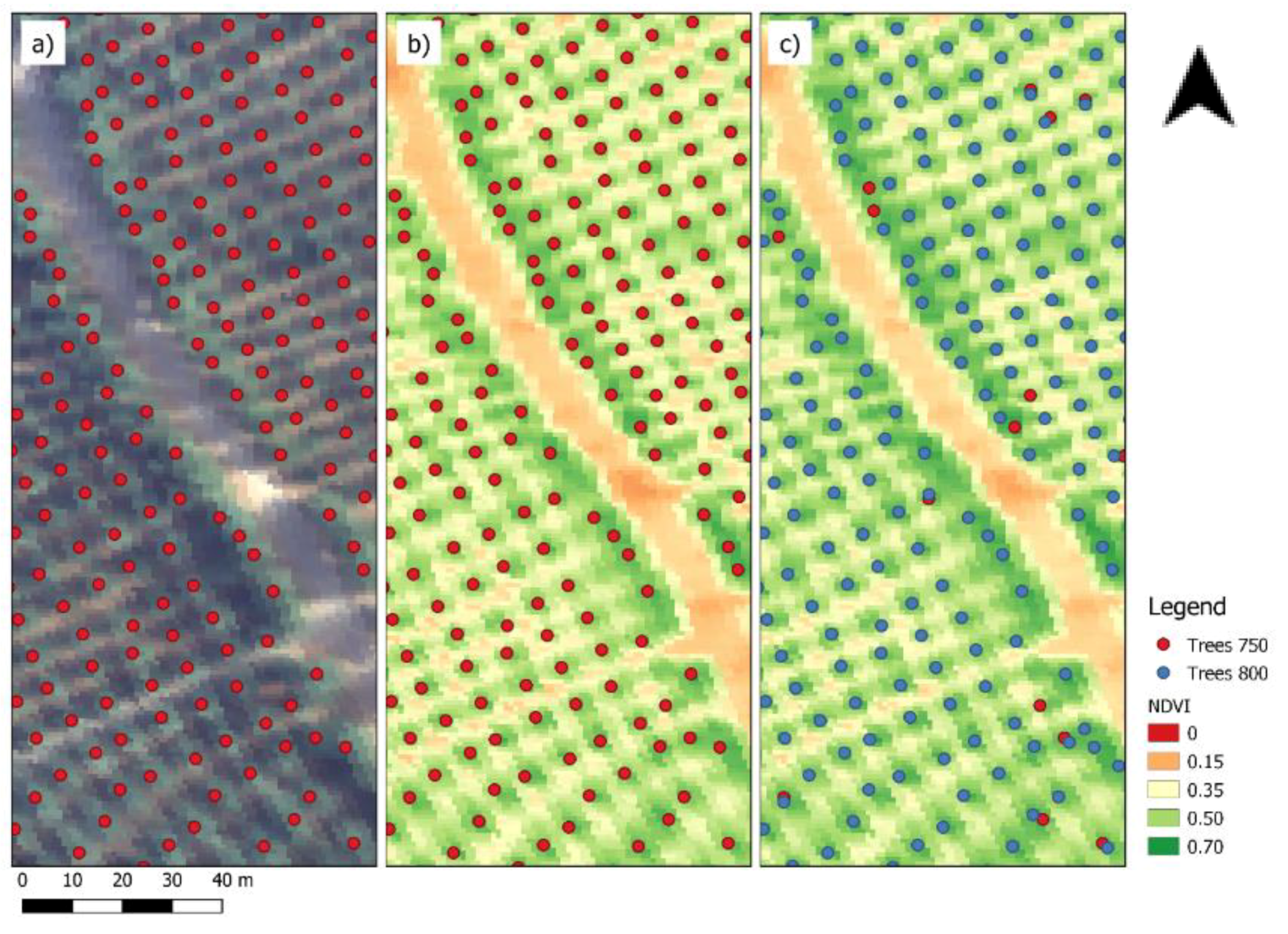
2.2.4. Tree-Level Analysis
3. Results
3.1. Block and Tree Identification Results
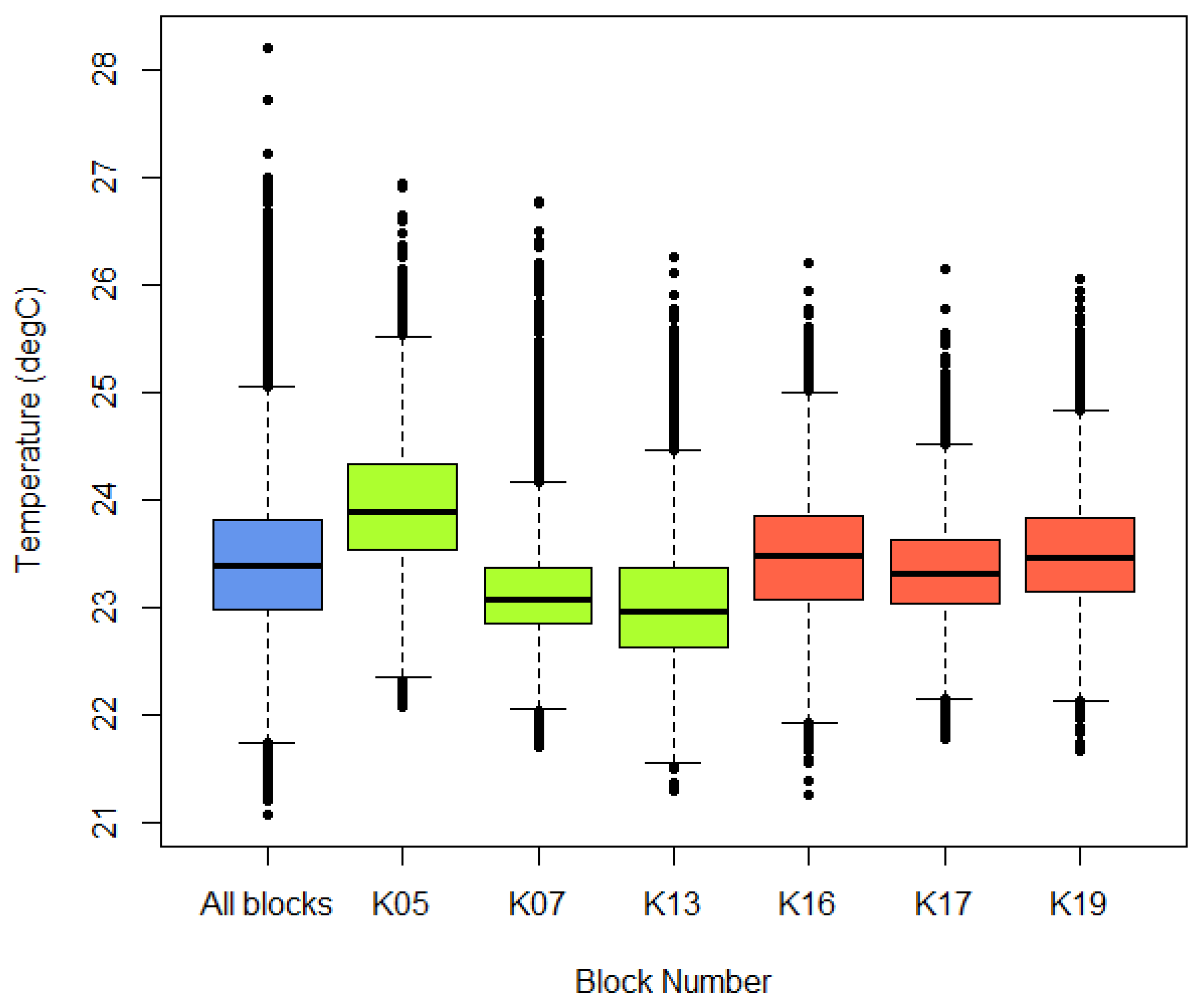
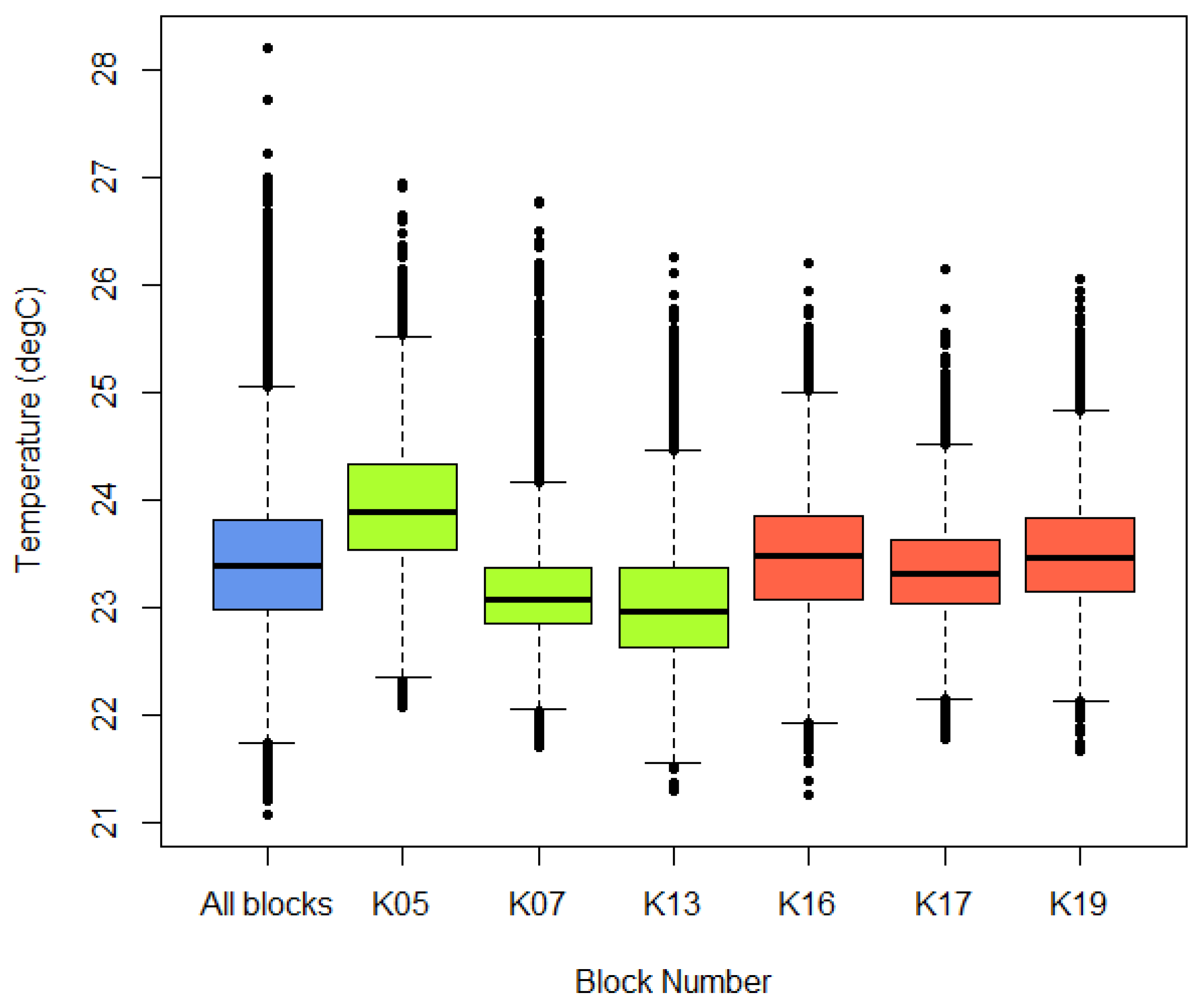
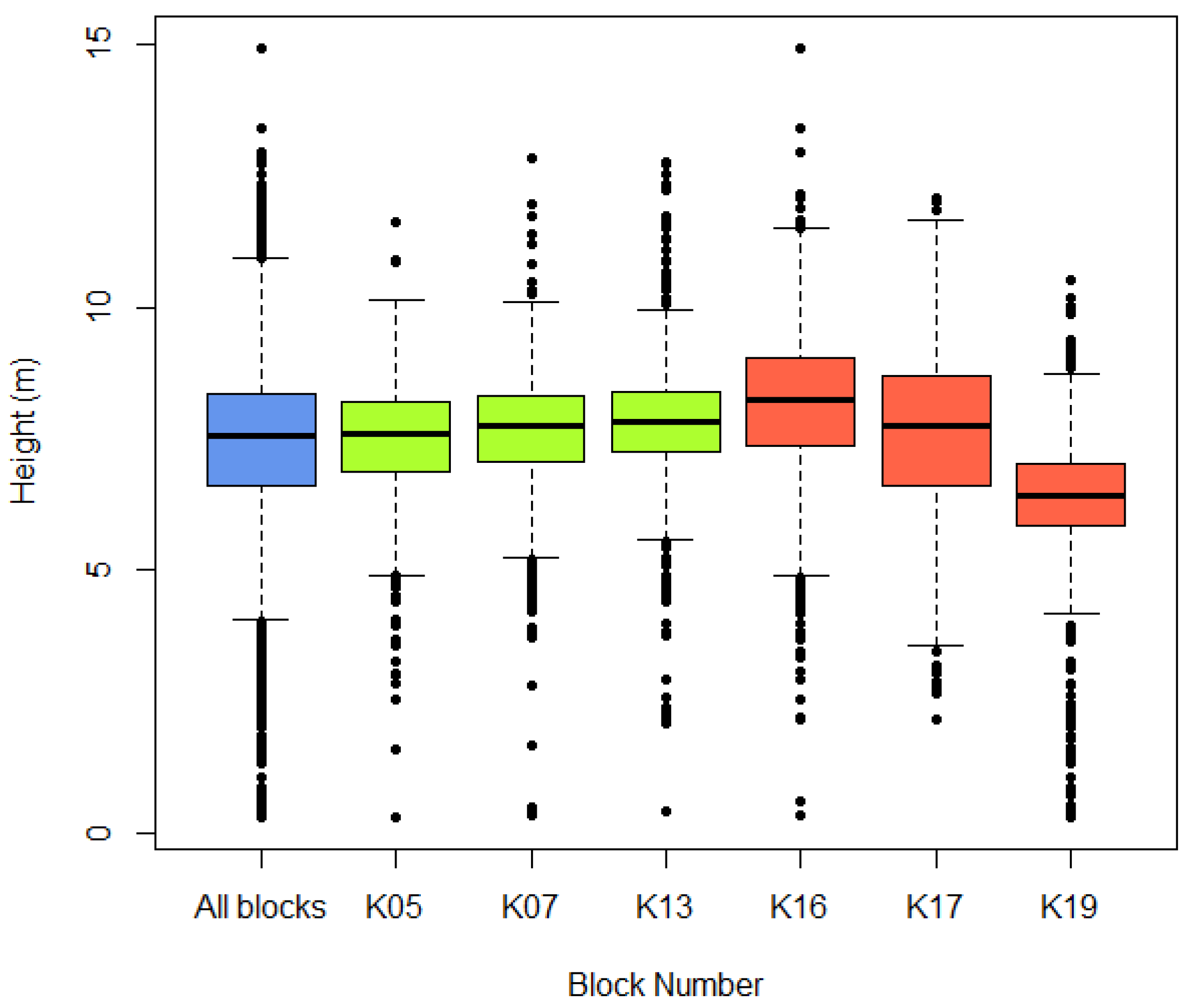
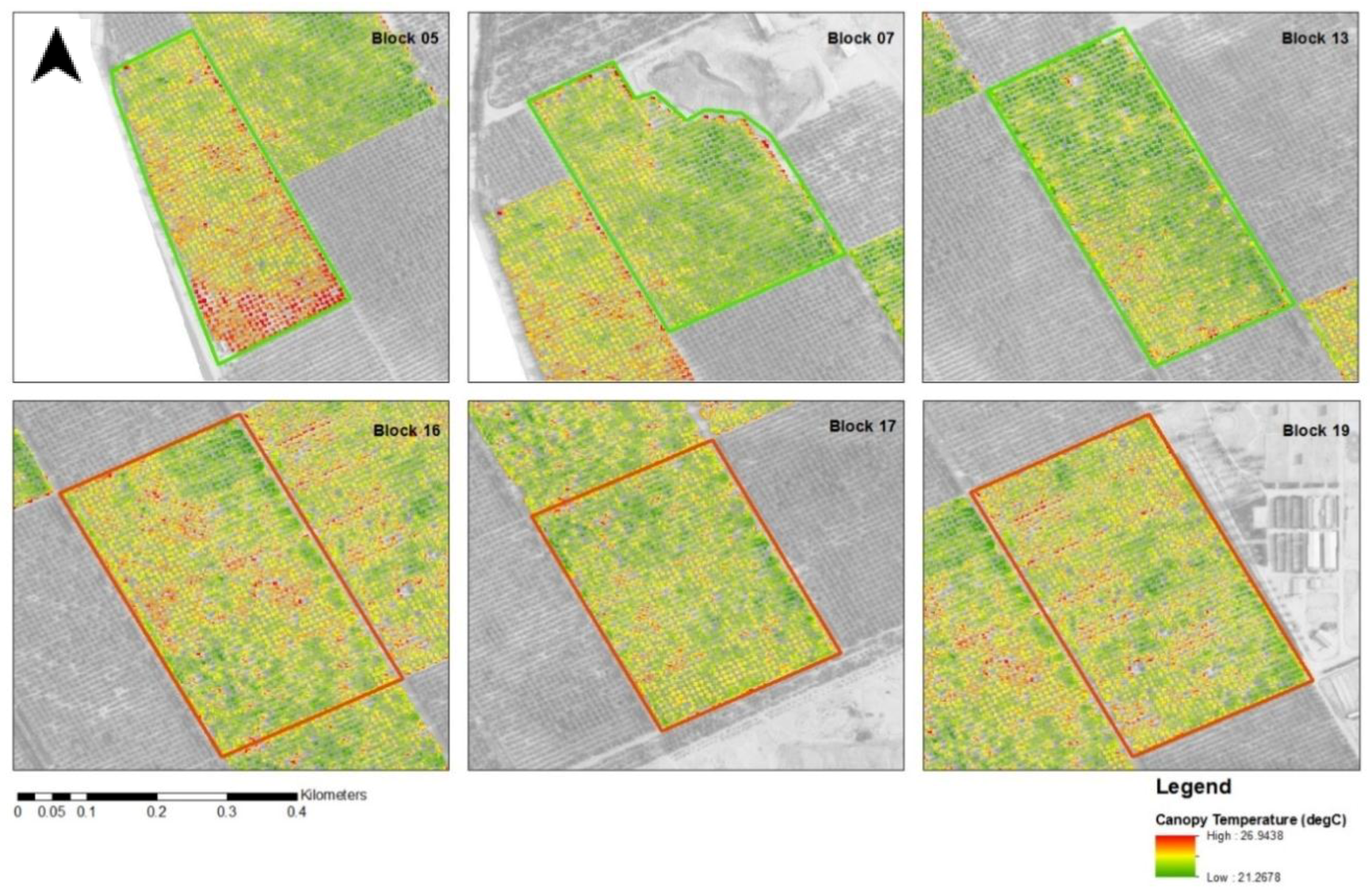
3.2. Block-Level Analysis
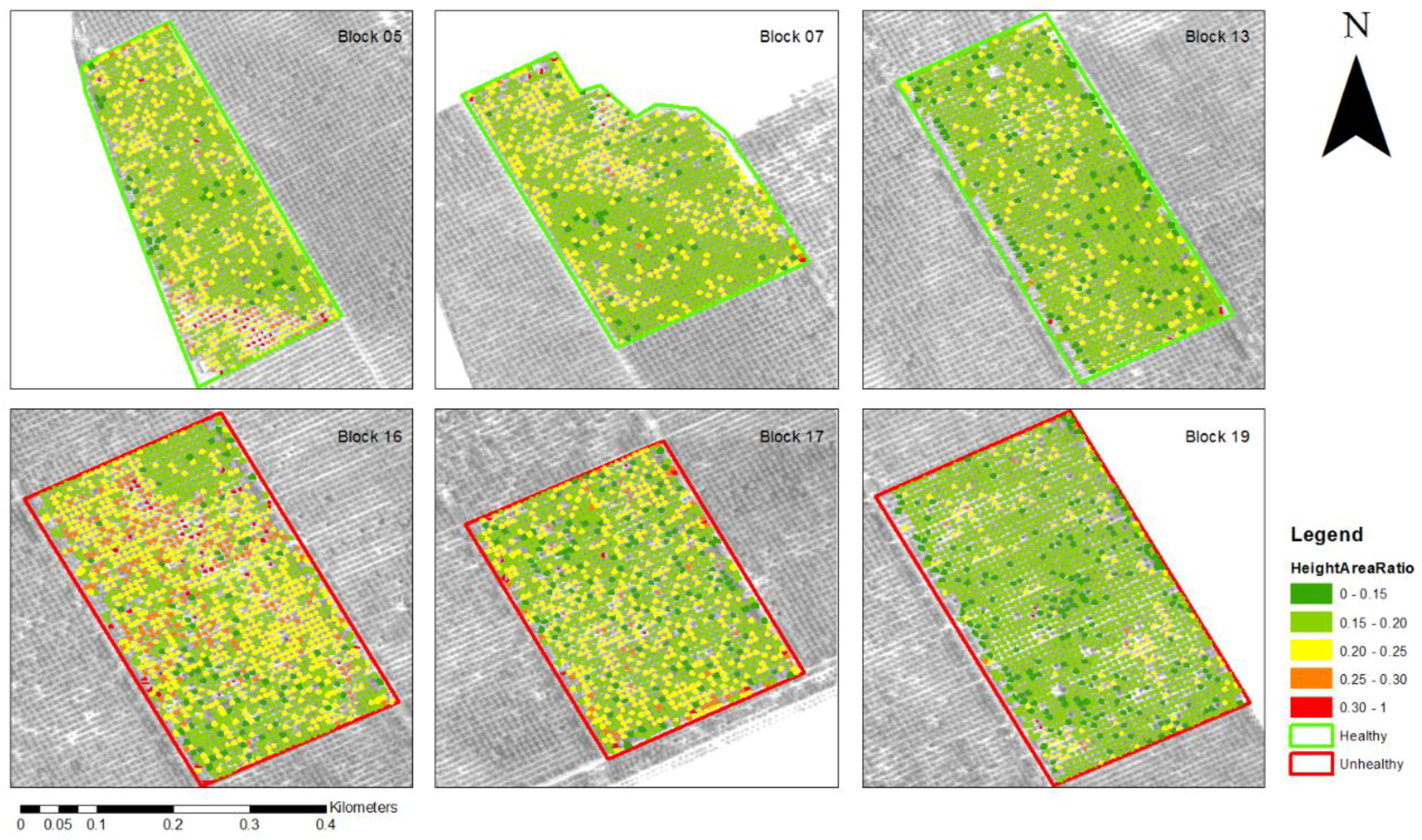
3.3. Individual Tree-Level Analysis
4. Discussion
4.1. Exploring the Main Findings of the Study
4.2. Added Value of Combined Datasets and New Indicators
4.3. Data Limitations
4.4. Future Developments
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vegetation Index | Formula | Reference |
|---|---|---|
| SRI | [19,33] | |
| NDVI 800 | [19,34] | |
| MSR | [19,35] | |
| NDVI 750 | [36] | |
| VOGI | [19,37] | |
| CIR | [38,39] | |
| gNDVI | [18,40,41] | |
| CIG | [38] | |
| PRI | [42,43] | |
| Optimum NDVI | [19] | |
| SIPI | [18,44] | |
| MCARI/OSAVI [705,750] | [45,46,47] | |
| TCARI/OSAVI [705,750] | [46,47] | |
| REP | [48] |
Appendix B
| Vegetation Index | Temperature (R-Squared) | Height (R-Squared) |
|---|---|---|
| REP | 0.313 | 0.253 |
| VOGI | 0.227 | 0.213 |
| gNDVI | 0.206 | 0.189 |
| CIG | 0.196 | 0.204 |
| CIR | 0.196 | 0.202 |
| TCOS750 | 0.191 | 0.103 |
| SIPI | 0.137 | 0.161 |
| SRI | 0.119 | 0.147 |
| NDVI800 | 9.106 | 0.146 |
| NDVI750 | 0.088 | 0.136 |
| MSR | 0.08 | 0.14 |
| NDVI730 | 0.071 | 0.112 |
| MCOS750 | 0.054 | 0.134 |
| PRI | 0.001 | 0.014 |
References
- Stringer, L.C. Reviewing the links between desertification and food insecurity: From parallel challenges to synergistic solutions. Food Secur. 2009, 1, 113–126. [Google Scholar] [CrossRef]
- Godfray, H.C.J.; Beddington, J.R.; Crute, I.R.; Haddad, L.; Lawrence, D.; Muir, J.F.; Pretty, J.; Robinson, S.; Thomas, S.M.; Toulmin, C. Food security: The challenge of feeding 9 billion people. Science 2010, 327, 812–818. [Google Scholar] [CrossRef] [PubMed]
- Arias, E.; Hodder, A.J.; Oihabi, A. FAO support to date palm development around the world: 70 years of activity. Emir. J. Food Agric. 2016, 28, 1–11. [Google Scholar]
- Al-Dosary, N.M.N.; Al-Dobai, S.; Faleiro, J.R. Review of the management of red palm weevil Rhynchophorus ferrugineus olivier in date palm Phoenix dactylifera L. Emir. J. Food Agric. 2016, 28, 34–44. [Google Scholar] [CrossRef]
- Shabani, F.; Kumar, L.; Nojoumian, A.H.; Esmaeili, A.; Togheyani, M. Projected future distribution of date palm and its potential use in alleviating micronutrient deficiency. J. Sci. Food Agric. 2015, 96, 1132–1140. [Google Scholar] [CrossRef] [PubMed]
- Cohen, Y.; Alchanatis, V.; Prigojin, A.; Levi, A.; Soroker, V.; Cohen, Y. Use of aerial thermal imaging to estimate water status of palm trees. Precis. Agric. 2012, 13, 123–140. [Google Scholar] [CrossRef]
- Elshibli, S.; Elshibli, E.M.; Korpelainen, H. Growth and photosynthetic CO2 responses of date palm plants to water availability. Emir. J. Food Agric. 2016, 28, 58–65. [Google Scholar] [CrossRef]
- Tripler, E.; Ben-Gal, A.; Shani, U. Consequence of salinity and excess boron on growth, evapotranspiration and ion uptake in date palm (Phoenix dactylifera L., cv. Medjool). Plant Soil 2007, 297, 147–155. [Google Scholar] [CrossRef]
- Askri, B.; Ahmed, A.T.; Abichou, T.; Bouhhlila, R. Effects of shallow water table, salinity and frequency of irrigation water on the date palm water use. J. Hydrol. 2014, 513, 81–90. [Google Scholar] [CrossRef]
- Yaish, M.W.; Kumar, P.P. Salt tolerance research in date palm tree (Phoenix dactylifera L.), past, present, and future perspectives. Front. Plant Sci. 2015, 6, 348. [Google Scholar] [CrossRef]
- Abraham, V.A.; Al Shuaibi, M.A.; Faleiro, J.R.; Abozuhairah, R.A.; Viyasagar, P.S.P.V. An integrated management approach to for red palm weevil Rhynchophorus ferrugineus Oliv. A key pest of date palm in the Middle East. Agric. Sci. 1998, 3, 77–84. [Google Scholar] [CrossRef]
- Faleiro, J.R. A review of the issues and management of the Red Palm Weevil Rhynchophorus ferrugineus (Coleoptera: Rhynchophoridae) in coconut and date palm during the last one hundred years. Int. J. Trop. Insect Sci. 2006, 26, 135–154. [Google Scholar]
- Ali, A.-S.A.; Hama, N.N. Integrated management for major date palm pests in Iraq. Emir. J. Food Agric. 2016, 28, 24–33. [Google Scholar] [CrossRef]
- Gutiérrez, A.; Ruiz, V.; Moltó, E.; Tapia, G.; del Mar Téllez, M. Development of a bioacoustic sensor for the early detection of Red Palm Weevil (Rhynchophorus ferrugineus Olivier). Crop Prot. 2010, 29, 671–676. [Google Scholar] [CrossRef]
- Dembilio, O.; Jacques, J.A. Sustainable Pest Management in Date Palm: Current Status and Emerging Challenges, 1st ed.; Springer International Publishing: Basel, Switzerland, 2015; pp. 13–36. [Google Scholar]
- Soroker, V.; Suma, P.; la Pergola, A.; Cohen, Y.; Cohen, Y.; Alchanatis, V.; Golomb, O.; Goldshtein, E.; Hetzroni, A.; Galazan, L.; et al. Early detection and monitoring of Red Palm Weevil: Approaches and challenges. In Proceedings of the Palm Pest Mediterranean Conference, Nice, France, 19–18 July 2013. [Google Scholar]
- Golomb, O.; Alchanatis, V.; Cohen, Y.; Levin, N.; Cohen, Y.; Soroker, V. Precision Agriculture ’15, 1st ed.; Wageningen Academic Publishers: Wageningen, The Netherlands, 2015; pp. 643–650. [Google Scholar]
- Bannari, A.; Khurshid, K.S.; Staenz, K.; Schwarz, J. Potential of Hyperion EO-1 hyperspectral data for wheat crop chlorophyll content estimation. Can. J. Remote Sens. 2008, 34, 139–157. [Google Scholar] [CrossRef]
- Shafri, H.Z.M.; Hamdan, N.; Anuar, M.I. Detection of stressed oil palms from an airborne sensor using optimized spectral indices. Int. J. Remote Sens. 2012, 33, 4293–4311. [Google Scholar] [CrossRef]
- Shendryk, I.; Broich, M.; Tulbure, M.G.; McGrath, A.; Keith, D.; Alexandrov, S.V. Mapping individual tree health using full-waveform airborne laser scans and imaging spectroscopy: A case study for a floodplain eucalypt forest. Remote Sens. Environ. 2016, 187, 202–217. [Google Scholar] [CrossRef]
- Alhammadi, M.S.; Glenn, E.P. Detecting date palm trees health and vegetation greenness change of the eastern coast of the United Arab Emirates using SAVI. Int. J. Remote Sens. 2008, 29, 1745–1765. [Google Scholar] [CrossRef]
- Vidyasagar, P.S.P.V.; Al Saihati, A.; Al Mohanna, O.E.; Subbei, A.I.; Mohsin, A.M.A. Management of Red Palm Weevil Rhynchophorus ferrugineus oliv., a serious pest of date palm in Al Qatif, Kindgdom of Saudi Arabia. J. Plant. Crop. 2000, 28, 35–43. [Google Scholar]
- Aleid, S.M.; Al-Kharyi, J.M.; Al-Bahrany, A.M. Date Palm Genetic Resources and Utilization: Volume 2: Asia and Europe, 1st ed.; Springer: Dordrecht, The Netherlands, 2015; pp. 49–95. [Google Scholar]
- InfraTec. VarioCam HD Head: User Manual; InfraTec: Dresden, Germany, 2016; Available online: https://www.infratec.at/downloads/en/thermography/manuals/infratec-manual-variocam-hd-head.pdf (accessed on 11 January 2019).
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Stucture-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Dalponte, M.; Reyes, F.; Kandare, K.; Gianelle, D. Delineation of Individual Tree Crowns from ALS and Hyperspectral data: A comparison among four methods. Eur. J. Remote Sens. 2015, 48, 365–382. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Computelectron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Gevaert, C.M.; Suomalainen, J.; Tang, J.; Kooistra, L. Generation of spectral-temporal response surfaces by combining multispectral satellite and hyperspectral UAV imagery for precision agriculture applications. IEEE J.-Stars 2015, 8, 3140–3146. [Google Scholar] [CrossRef]
- Jiménez-Brenes, F.M.; López-Granados, F.; de Castro, A.I.; Torres-Sánchez, J.; Serrano, N.; Peña, J.M. Quantifying pruning impacts on olive tree architecture and annual canopy growth by using UAV-based 3D modelling. Plant Methods 2017, 13, 55. [Google Scholar] [CrossRef] [PubMed]
- Massimo, P.; Alberto, R.A.; Roberto, M.; Khalid, A.; Ali, A. Devices to detect red palm weevil infestation on palm species. Precis. Agric. 2018, 19, 1049. [Google Scholar] [CrossRef]
- Al-Kindi, K.M.; Kwan, P.; Andrew, N.R.; Welch, M. Modelling spatiotemporal patterns of dubas bug infestations on date palms in northern Oman: A geographical information system case study. Crop Prot. 2017, 93, 113–121. [Google Scholar] [CrossRef]
- DateGIS Demo—An Integrated Geo-Information System (GIS) for Precision Agriculture of Date Palm Farming. Available online: https://business.esa.int/projects/dategis-demo (accessed on 9 December 2018).
- Jordan, C.F. Derivation of Leaf Area Index from quality of light on the forest floor. Ecology 1996, 90, 663–666. [Google Scholar] [CrossRef]
- Baret, F.; Guyot, G. Potentials and limits of vegetation indices for LAI and APAR assessment. Remote Sens. Environ. 1991, 35, 161–173. [Google Scholar] [CrossRef]
- Chen, J.M. Evaluation of vegetation indices and a modified simple ratio for boreal applications. Can. J. Remote Sens. 1996, 22, 229–242. [Google Scholar] [CrossRef]
- Apan, A.; Held, A.; Phinn, S.; Markley, J. Detecting sugar cane ‘orange rust’ disease using EO-1 Hyperion imagery. Int. J. Remote Sens. 2004, 25, 489–498. [Google Scholar] [CrossRef]
- Vogelmann, J.E.; Rock, B.N.; Moss, D.M. Red edge spectral measurements from sugar maple leaves. Int. J. Remote Sens. 1993, 14, 1563–1575. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef] [PubMed]
- Clevers, J.G.P.W.; Kooistra, L. Using Hyperspectral Remote Sensing Data for Retrieving Canopy Chlorophyll and Nitrogen Content. IEEE J.-Stars 2012, 5, 574–583. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Blackburn, G.A. Relationships between spectral reflectance and pigment concentrations in stacks of deciduous broadleaves. Remote Sens. Environ. 1999, 70, 224–237. [Google Scholar] [CrossRef]
- Gamon, J.A.; Peñuelas, J.; Field, C.B. A narrow-waveband spectral index that tracks diurnal changes in photosynthetic efficiency. Remote Sens. Environ. 1992, 14, 35–44. [Google Scholar] [CrossRef]
- Barton, C.V.M. Advances in remote sensing of plant stress. Plant Soil 2012, 354, 41–44. [Google Scholar] [CrossRef]
- Peñuelas, J.; Baret, J.; Filella, I. Semi-empirical indices to assess carotenoids/chlorophyll a ratio from leaf spectral reflectance. Photosynthetica 1995, 31, 221–230. [Google Scholar]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; Brown de Colstoun, E.; McMurtrey, J.E., III. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Haboudane, D.; Miller, J.R.; Tremblay, N.; Zarco-Tejada, P.J.; Dextraze, L. Integrated narrowband vegetation indices for prediction of crop chlorophyll content for application to precision agriculture. Remote Sens. Environ. 2002, 81, 416–426. [Google Scholar] [CrossRef]
- Wu, C.; Niu, Z.; Tang, Q.; Huang, W. Estimating chlorophyll content from hyperspectral vegetation indices: Modelling and validation. Agric. For. Meteorol. 2008, 148, 1230–1241. [Google Scholar] [CrossRef]
- Clevers, J.G.P.W.; de Jong, S.M.; Epema, G.; van der Meer, F.; Bakker, W.H.; Skidmore, A.K.; Addink, E.A. MERIS and the red-edge position. Int. J. Appl. Earth Obs. Geoinf. 2001, 3, 313–320. [Google Scholar] [CrossRef]
| Data Type | RGB | LiDAR | Thermal | Hyperspectral | |
|---|---|---|---|---|---|
| Name of sensor 1 | Phase One iXA-R Camera 2 | RIEGL LMS-Q1560 3 | VarioCAM® HD head 4 | HySpex VNIR-1800 5 | Hy-Spex SWIR-384 5 |
| Type of sensor | Medium-format camera system | Rotating polygon mirror | Uncooled microbolometer focal-plane array | Pushbroom camera actively cooled and stabilized scientific CMOS detector | Pushbroom camera Mercury cadmium telluride sensor |
| Spectral range | Visible | Near-infrared | 7.5–14 µm | 0.4–1 nm, 182 bands | 0.93–2.5 nm, 288 bands |
| Spatial resolution | 0.15 m, 0.6 m, 1.8 m | 1 m, 2 m | 1.8 m | 1 m | 1 m |
| May 2016 | June 2016 | RGB Check 1 | Thermal Image Distortion 2 | |
|---|---|---|---|---|
| Block No. | No. RPW infested | No. RPW infested | 1–5 rating | Percent distorted |
| 5 | 0 | 0 | 1 | 20 |
| 7 | 0 | 0 | 1 | 30 |
| 13 | 0 | 0 | 2 | 30 |
| 16 | 8 | 4 | 5 | 30 |
| 17 | 10 | 4 | 5 | 30 |
| 19 | 1 | 9 | 5 | 20 |
| Block No. | Recorded # of Trees | # of Trees (1 m Resolution) | # of Trees (2 m Resolution) |
|---|---|---|---|
| 5 | 1188 | 1137 | 1043 |
| 7 | 1213 | 1197 | 1084 |
| 13 | 1417 | 1277 | 1131 |
| 16 | 1749 | 1572 | 1242 |
| 17 | 1422 | 1302 | 1013 |
| 19 | 1691 | 1617 | 1440 |
| Df | Sum Sq | Mean Sq | F Value | Pr (>F) | Significance 1 | |
|---|---|---|---|---|---|---|
| Block No. | 5 | 20.515 | 4.103 | 21.161 | 1.06E-14 | *** · |
| Health | 1 | 2.417 | 2.41 | 12.465 | 0.000611 | *** |
| Block No.: Health | 5 | 0.407 | 0.081 | 0.419 | 0.834311 | |
| Residuals | 108 | 20.94 | 0.194 |
| Mean Temperature (°C) | p Value | |||
|---|---|---|---|---|
| Unhealthy | Healthy | Difference | ||
| Block 5 | 24.37052 | 24.10113 | 0.26939 | 0.967108 |
| Block 7 | 23.30163 | 23.04954 | 0.25209 | 0.979962 |
| Block 13 | 23.02733 | 22.77498 | 0.25235 | 0.979803 |
| Block 16 | 23.80391 | 23.4071 | 0.39681 | 0.682276 |
| Block 17 | 23.40484 | 23.31995 | 0.08489 | 0.999999 |
| Block 19 | 23.68493 | 23.23745 | 0.44748 | 0.50232 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mulley, M.; Kooistra, L.; Bierens, L. High-Resolution Multisensor Remote Sensing to Support Date Palm Farm Management. Agriculture 2019, 9, 26. https://doi.org/10.3390/agriculture9020026
Mulley M, Kooistra L, Bierens L. High-Resolution Multisensor Remote Sensing to Support Date Palm Farm Management. Agriculture. 2019; 9(2):26. https://doi.org/10.3390/agriculture9020026
Chicago/Turabian StyleMulley, Maggie, Lammert Kooistra, and Laurens Bierens. 2019. "High-Resolution Multisensor Remote Sensing to Support Date Palm Farm Management" Agriculture 9, no. 2: 26. https://doi.org/10.3390/agriculture9020026
APA StyleMulley, M., Kooistra, L., & Bierens, L. (2019). High-Resolution Multisensor Remote Sensing to Support Date Palm Farm Management. Agriculture, 9(2), 26. https://doi.org/10.3390/agriculture9020026