Management of Plant Growth Regulators in Cotton Using Active Crop Canopy Sensors



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Sensor Performance to Predict Crop Parameters
2.2. Variable Rate Application of PGR
3. Results and Discussion
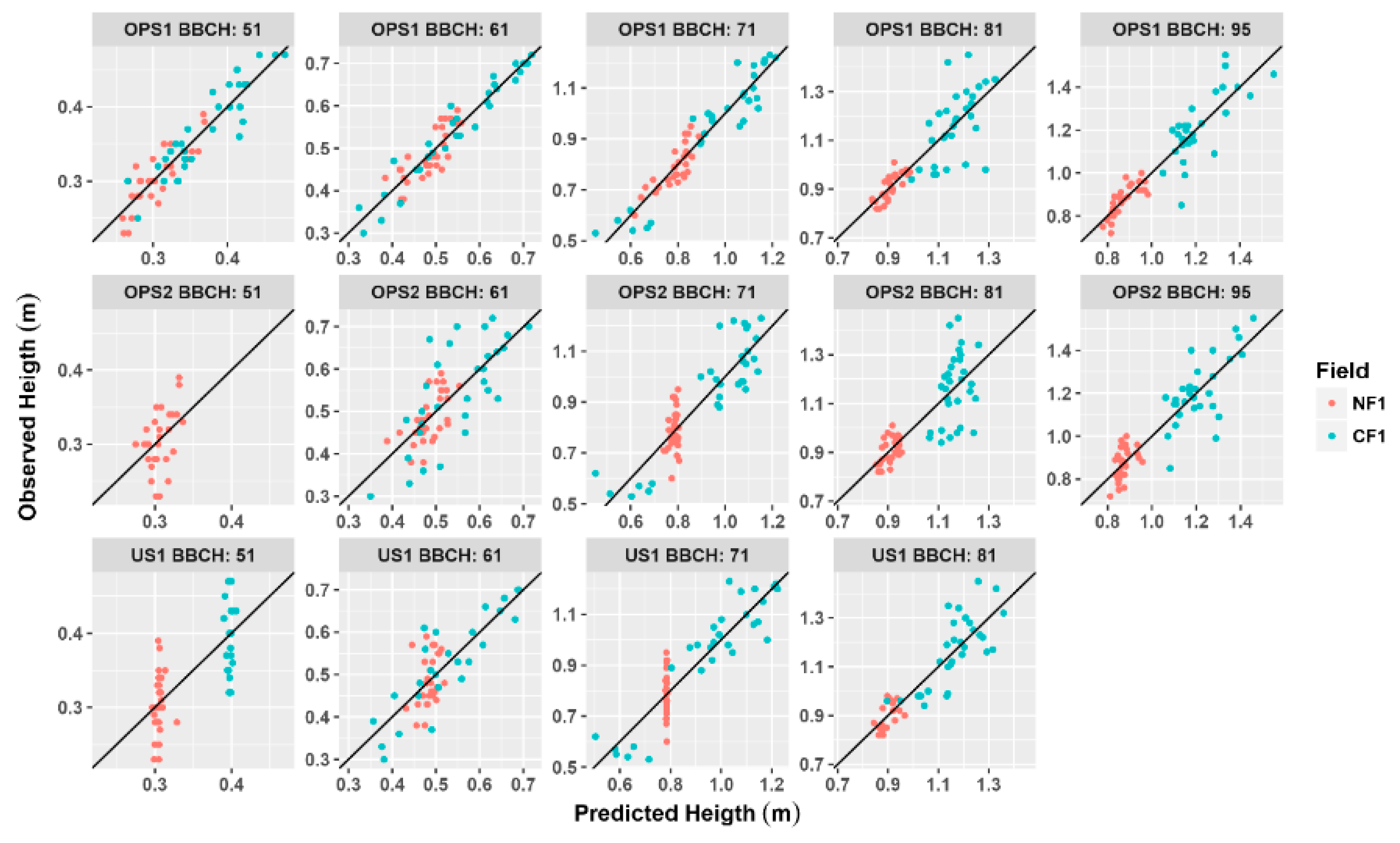
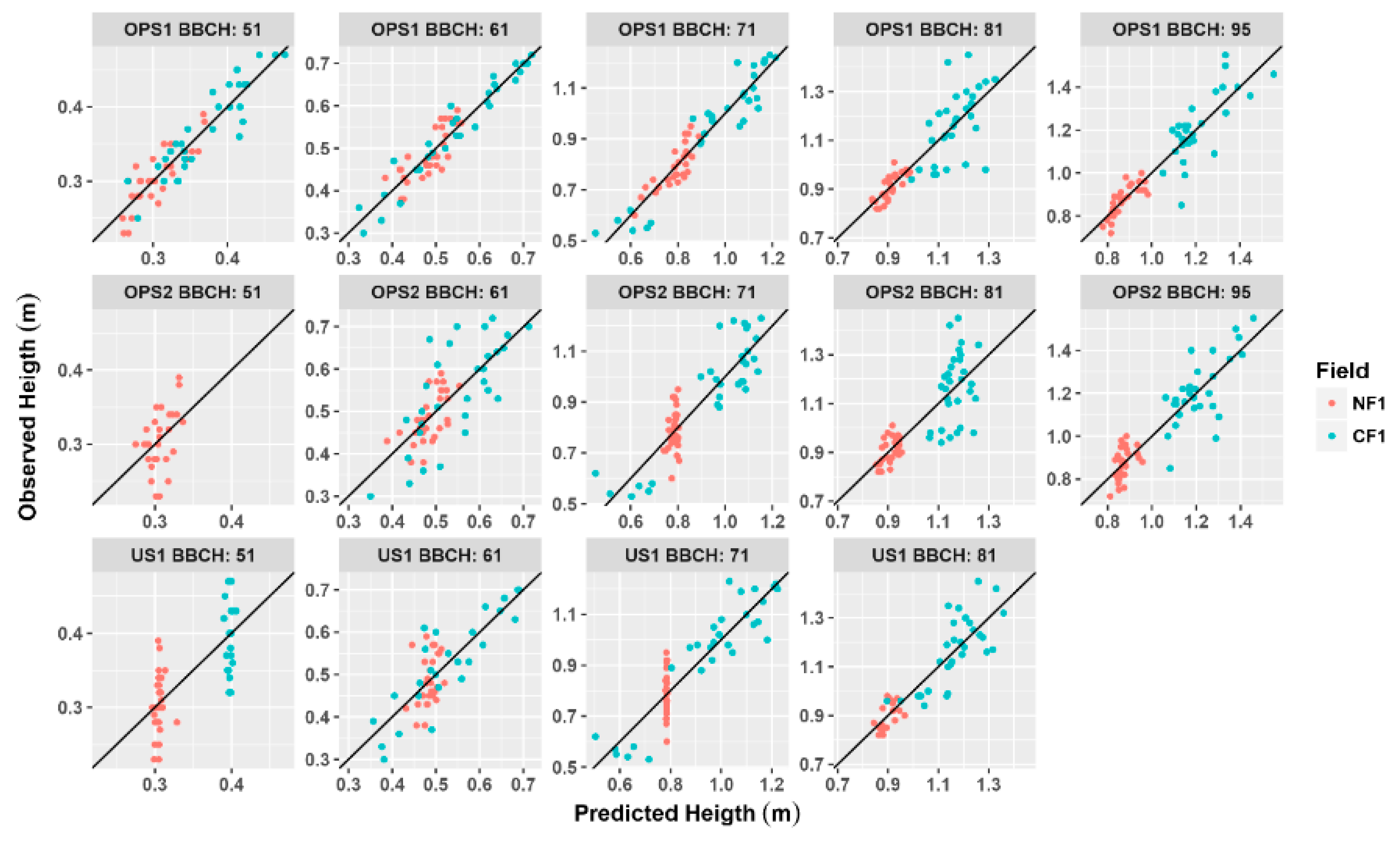
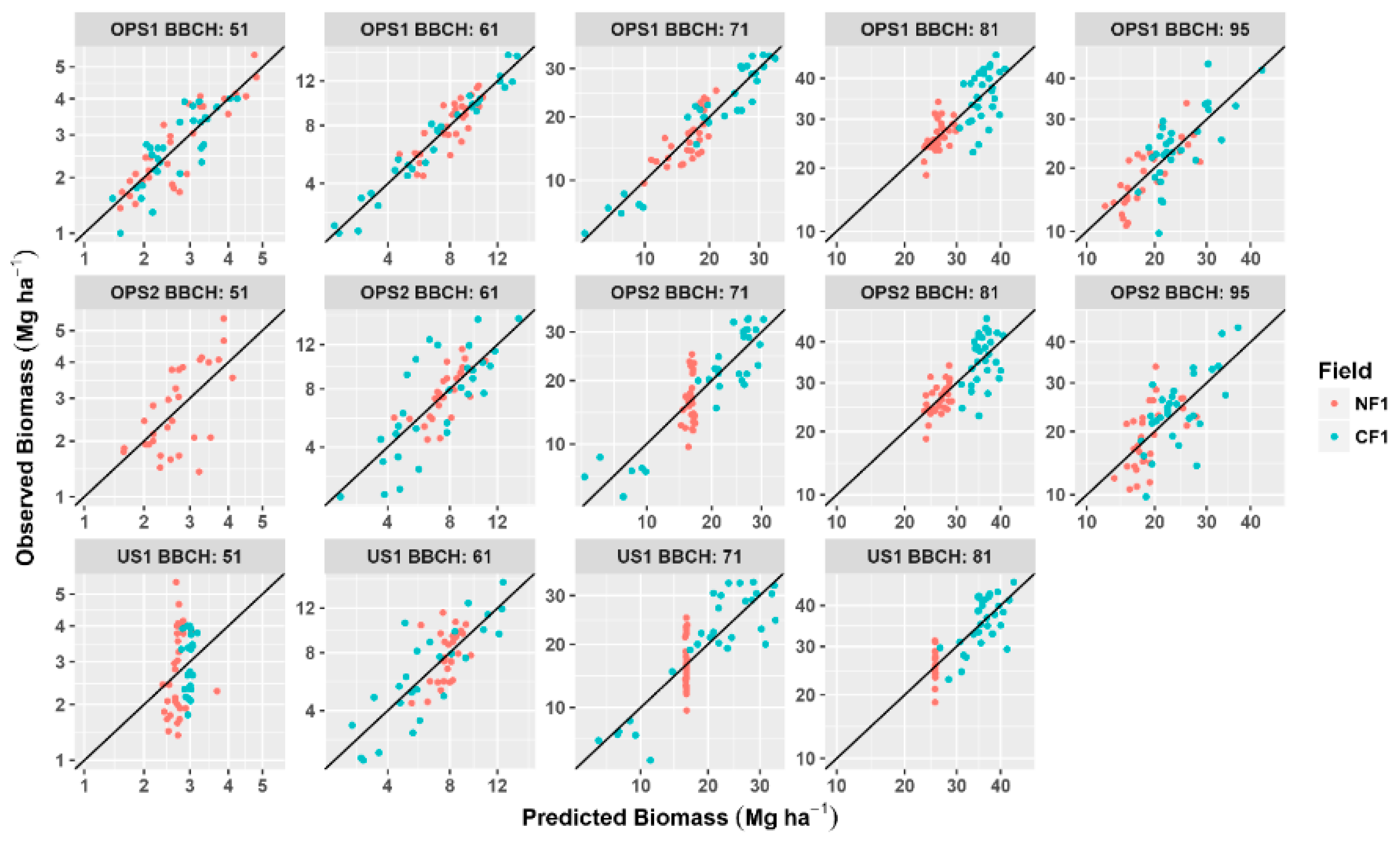
3.1. Sensor Performance to Predict Height and Biomass in Different Crop Stages
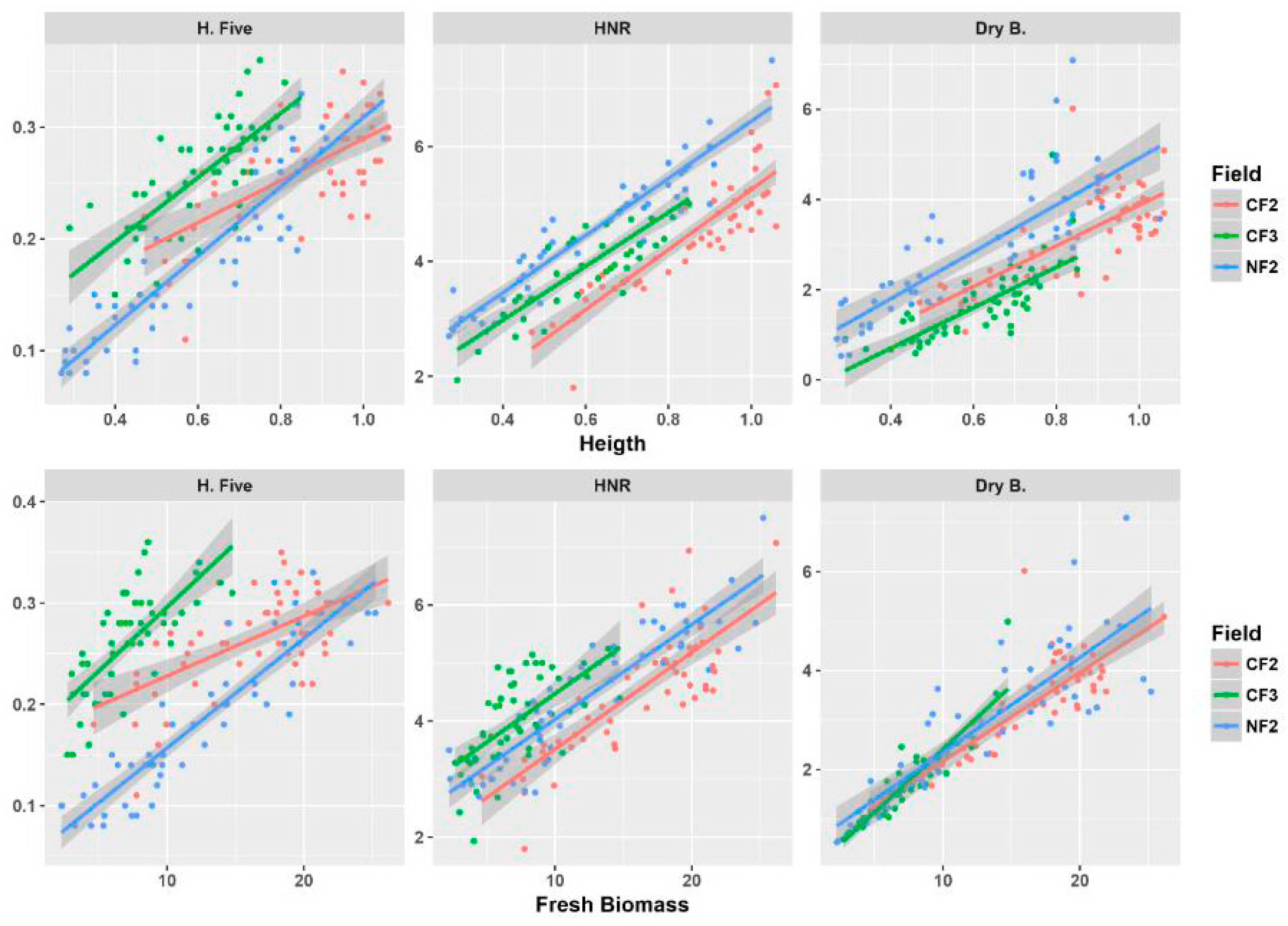
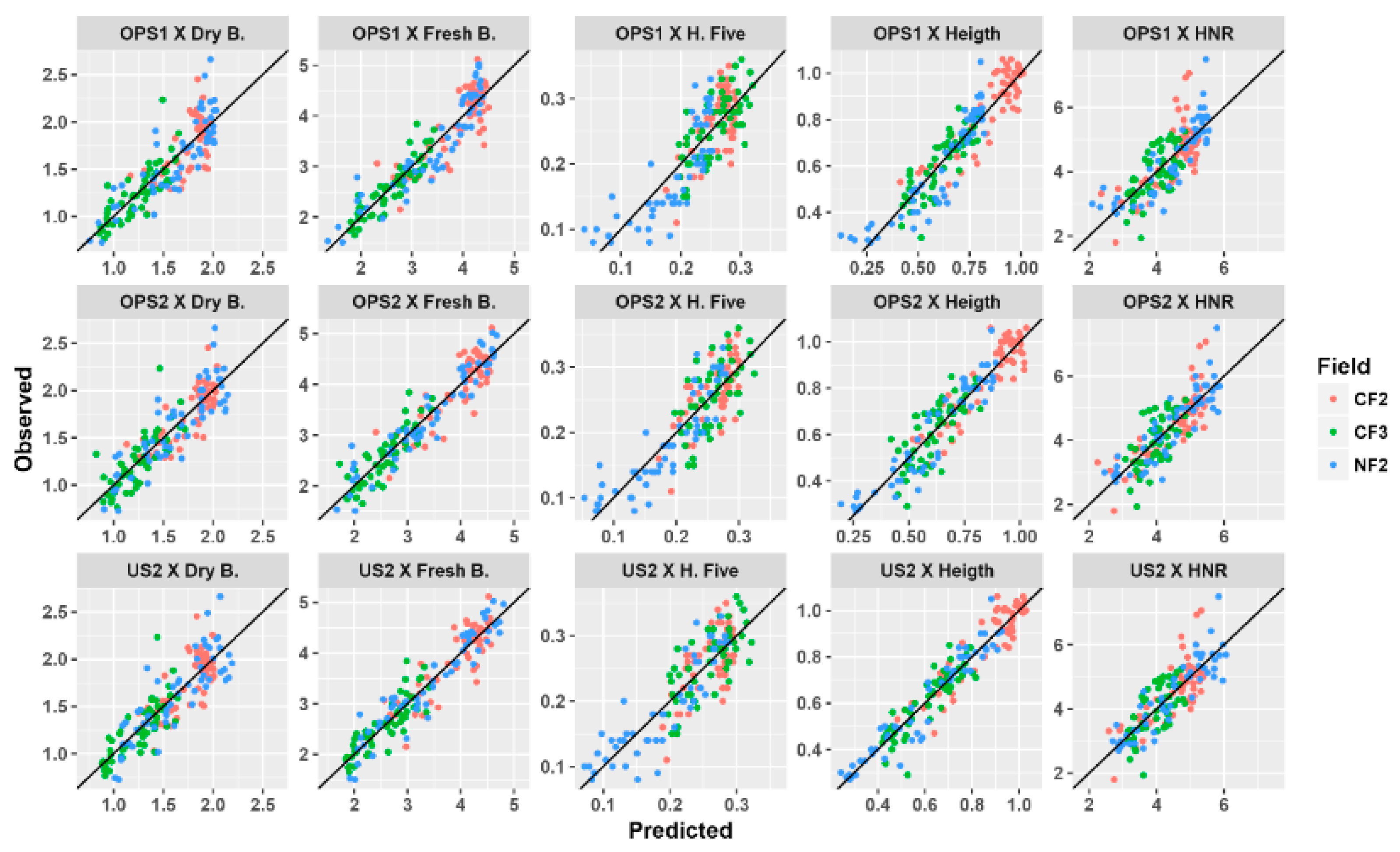
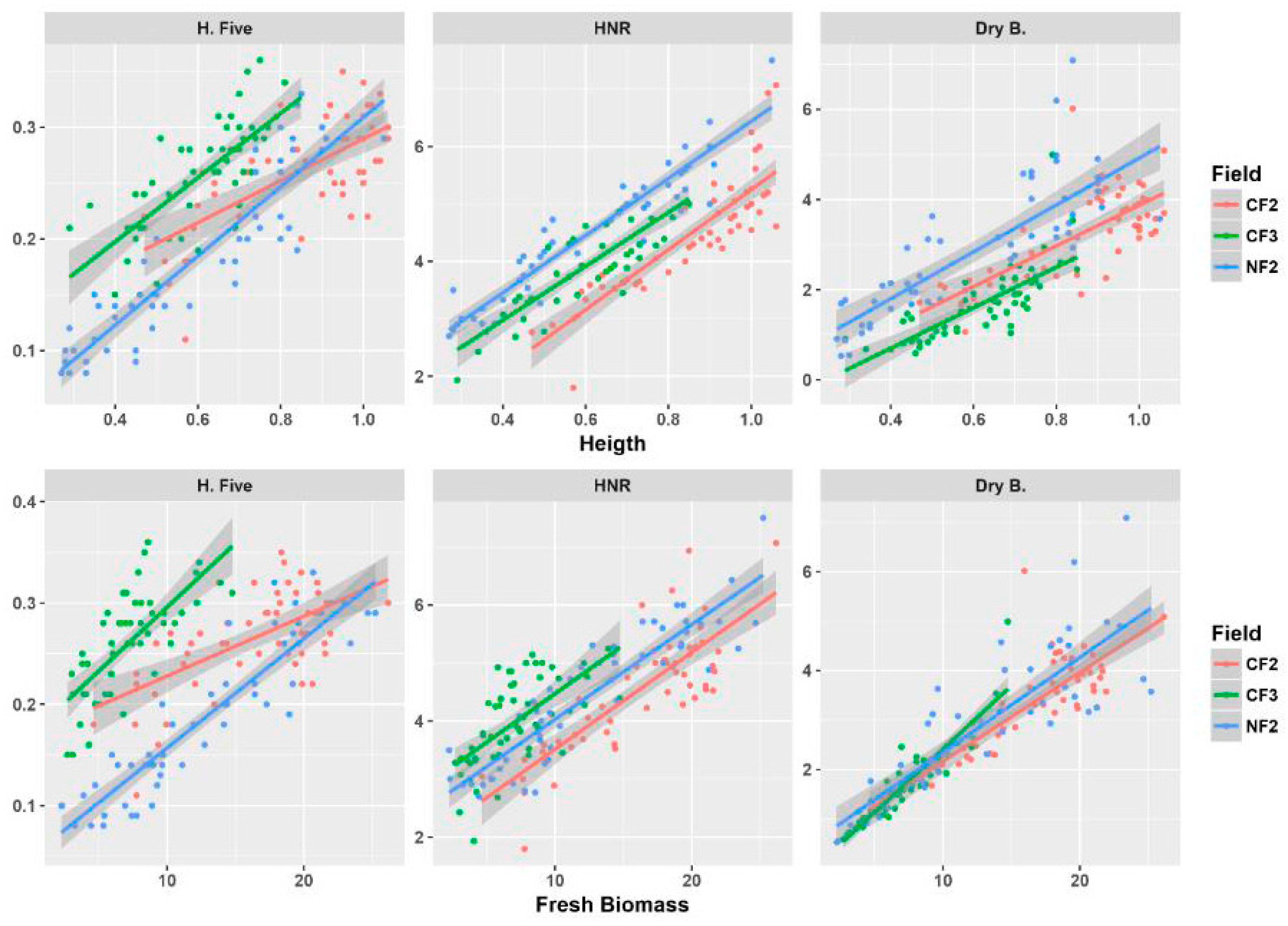
3.2. Sensor Performance to Predict General Crop Parameters
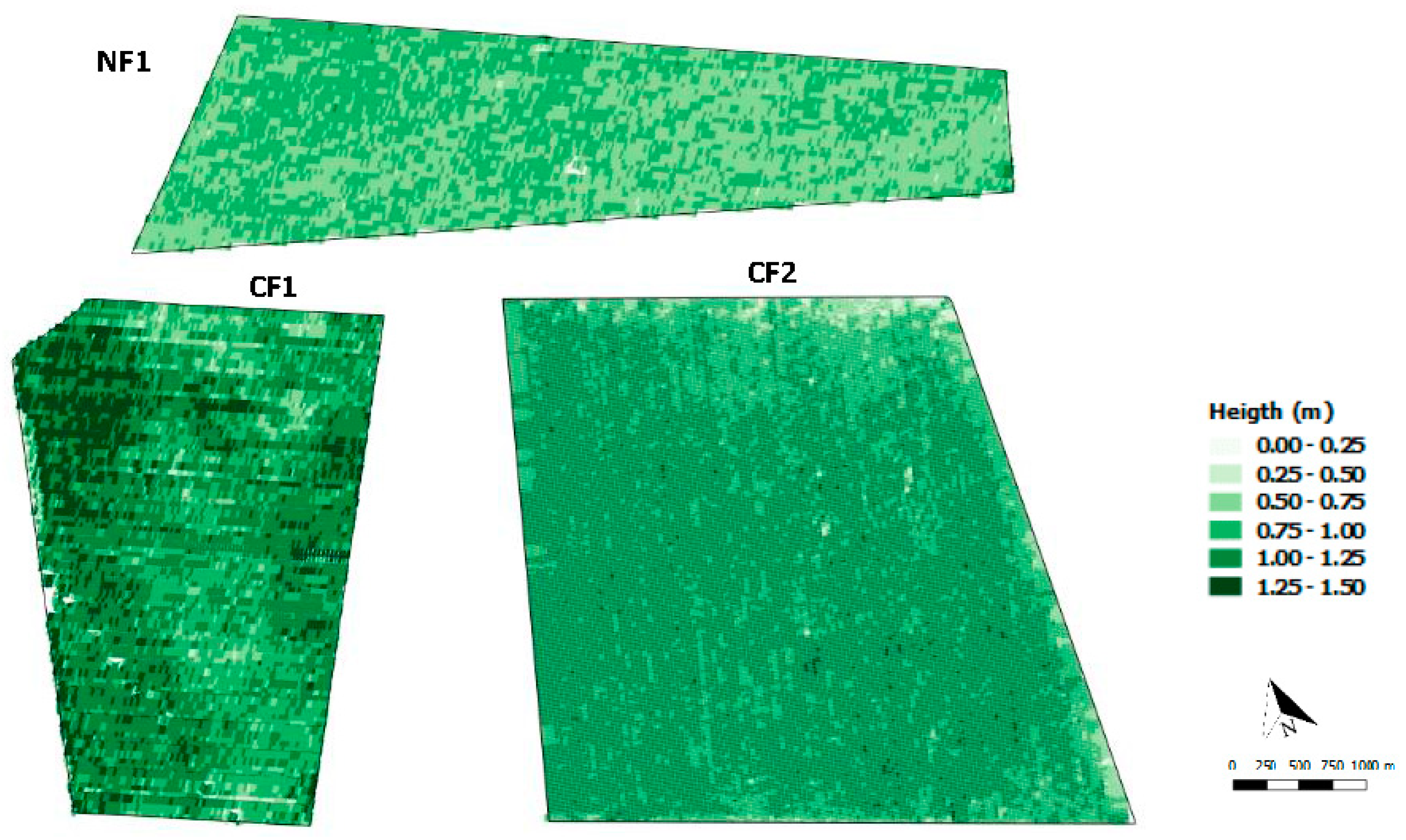
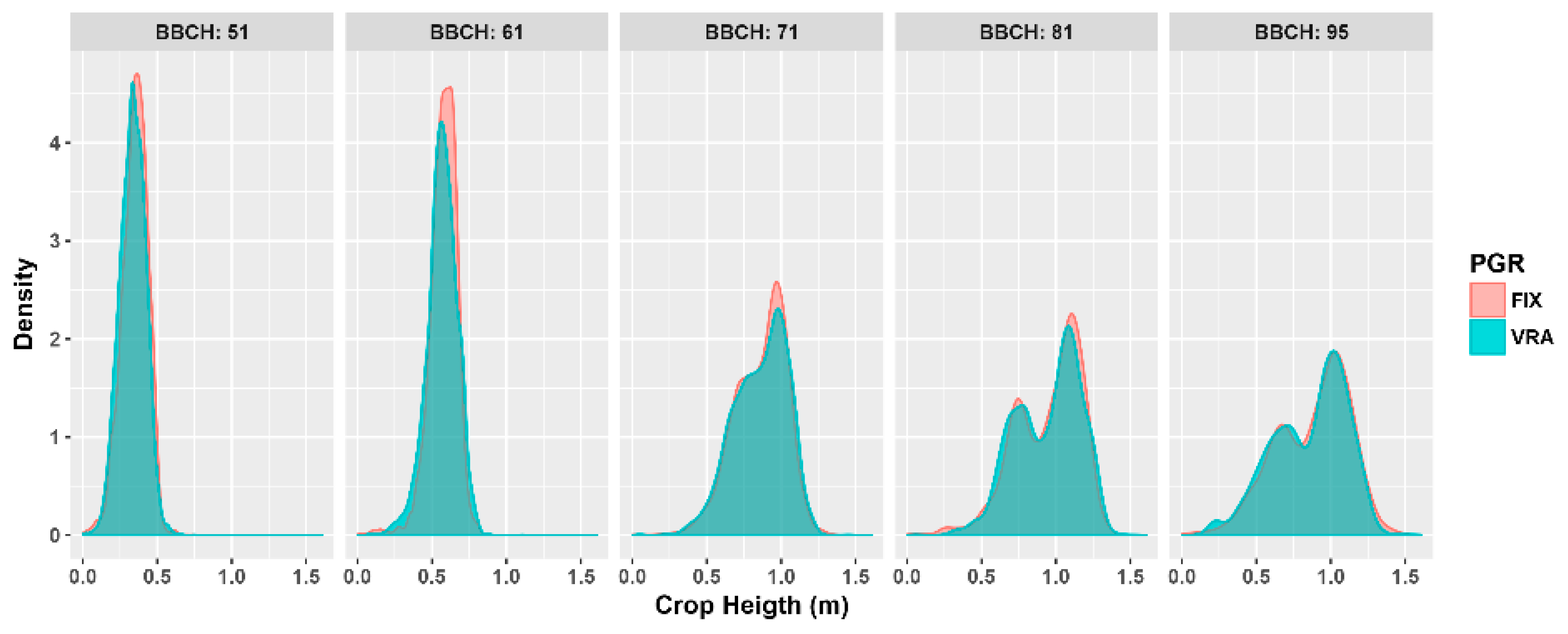
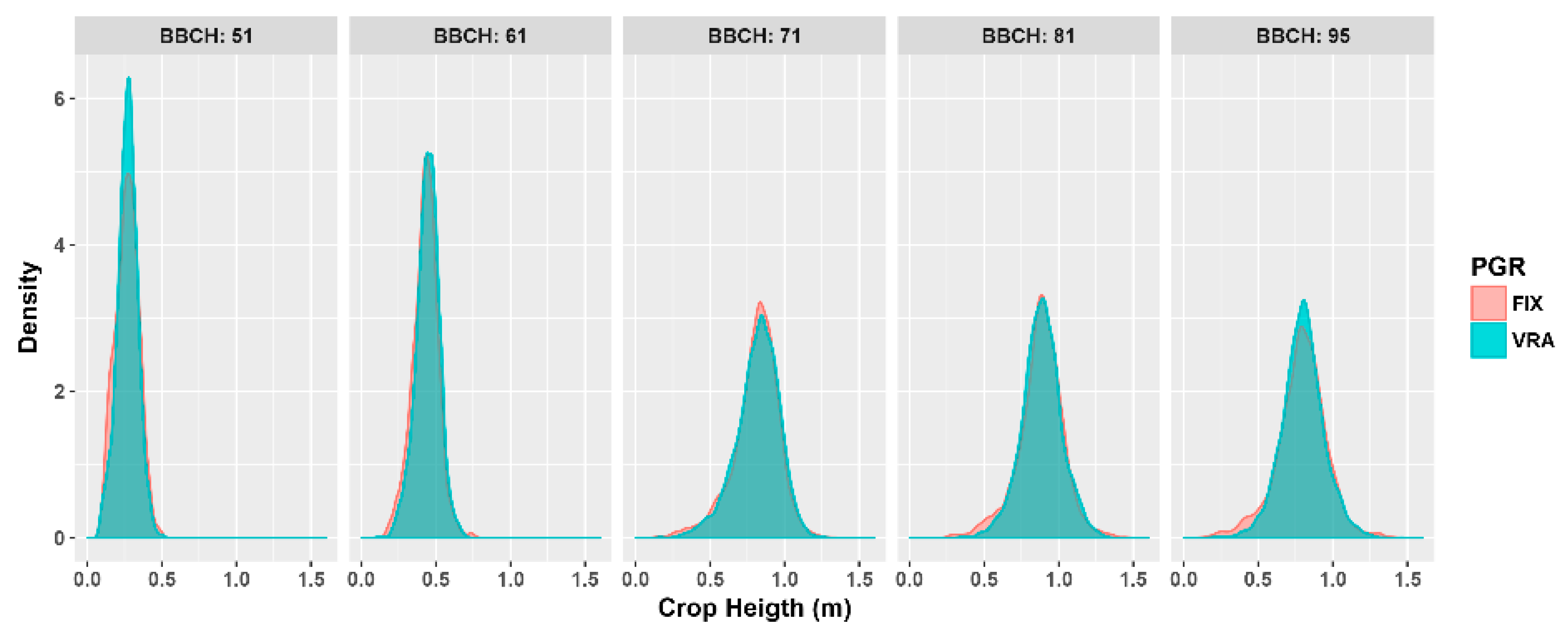
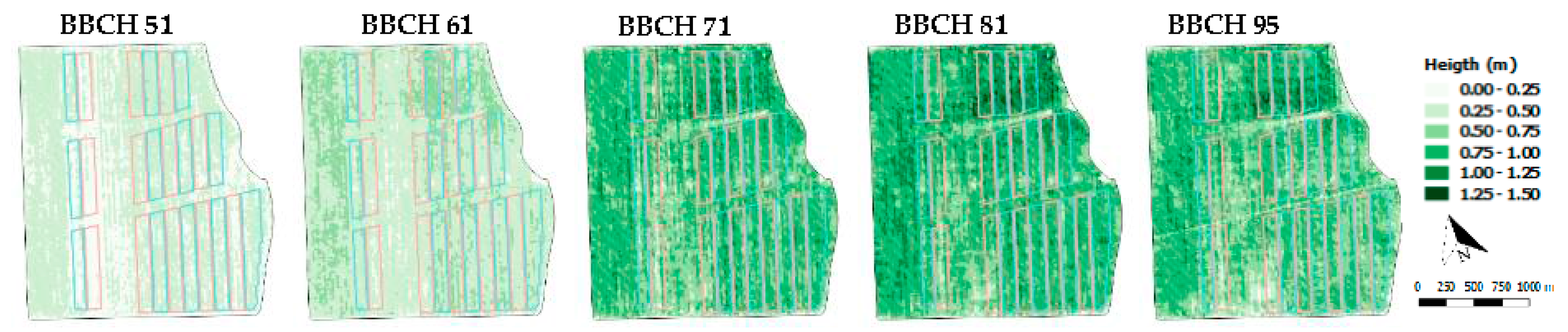
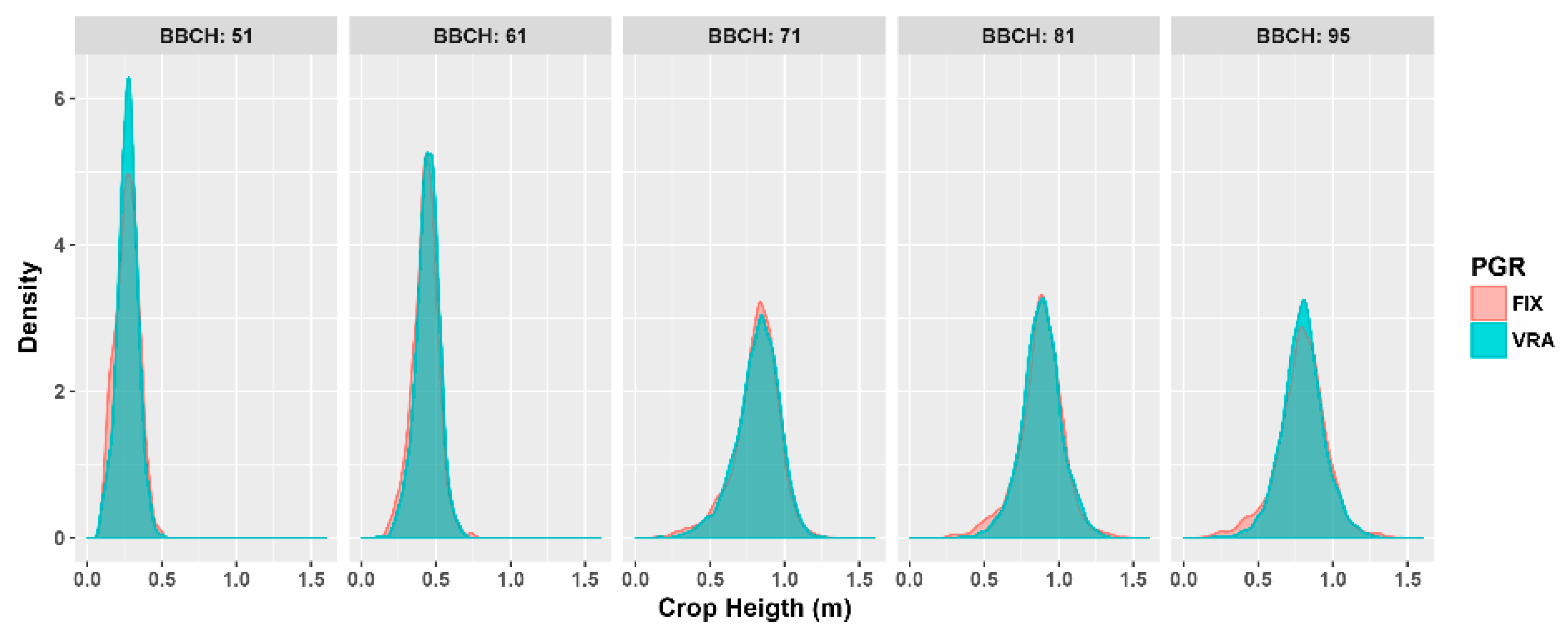
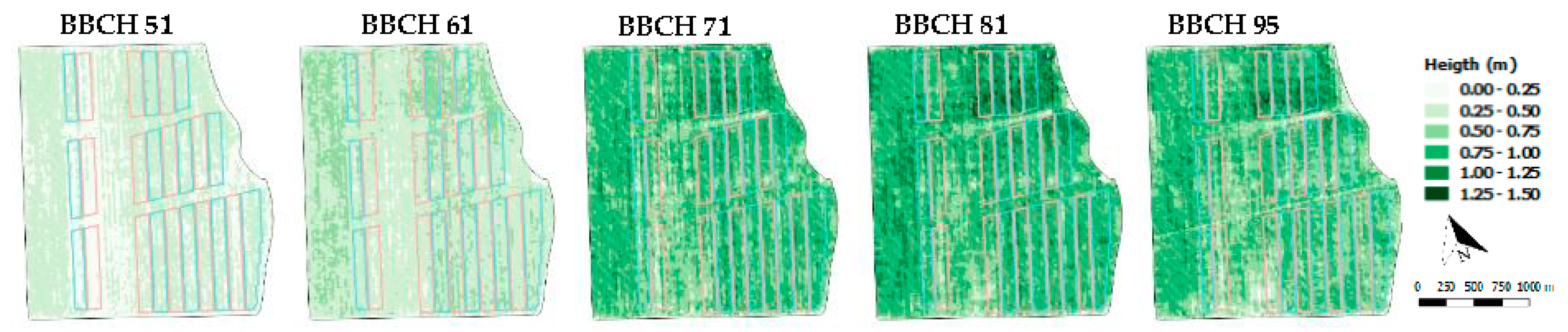
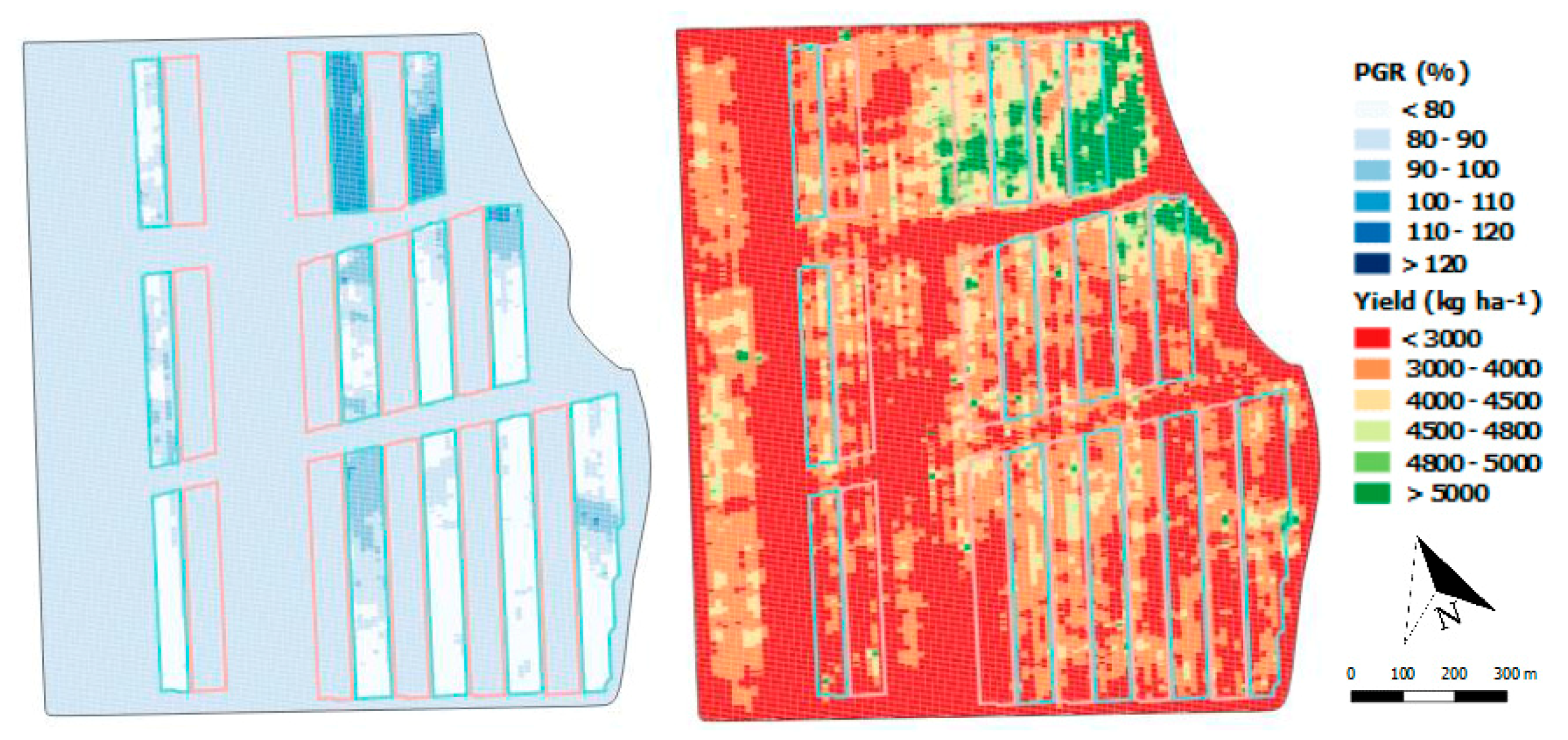
3.3. Crop Response to Variable Rate PGR
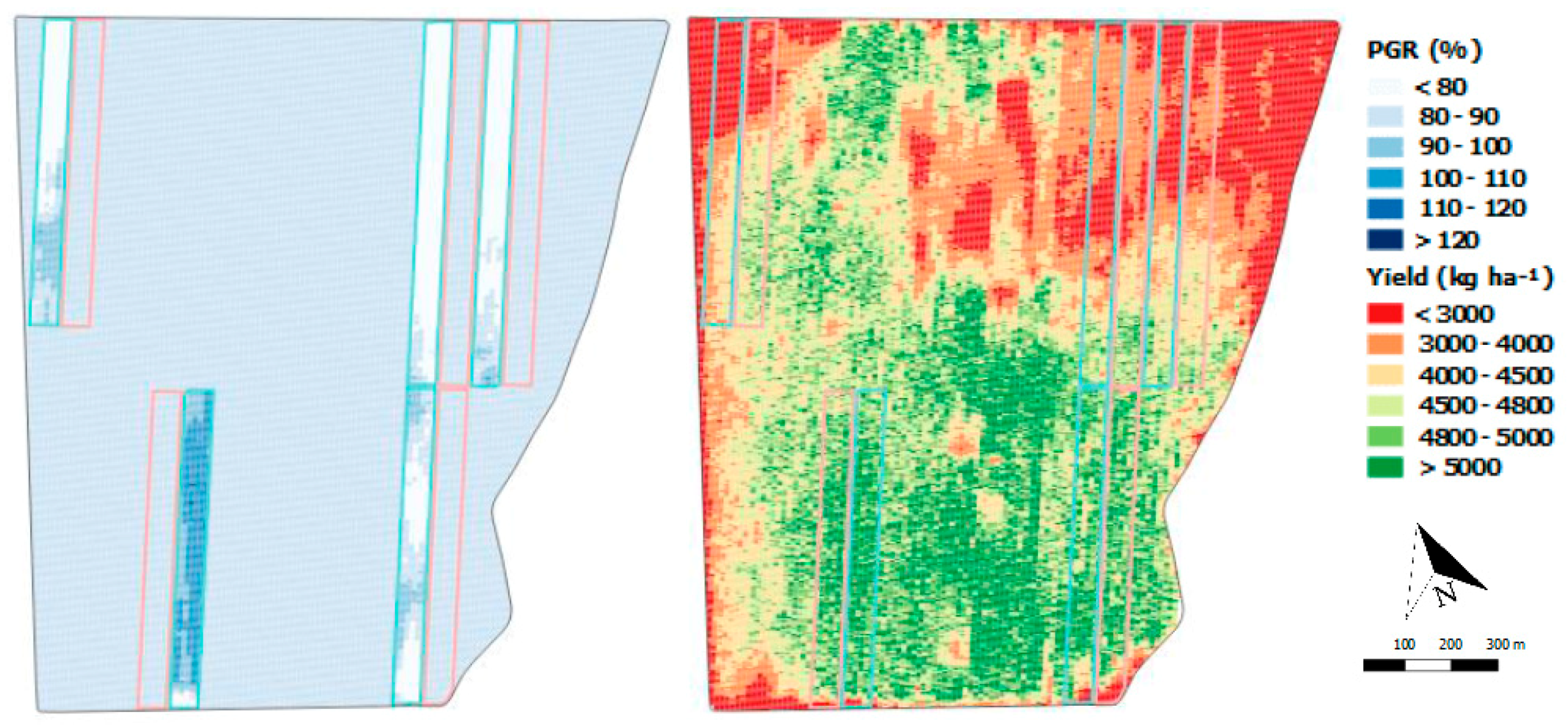
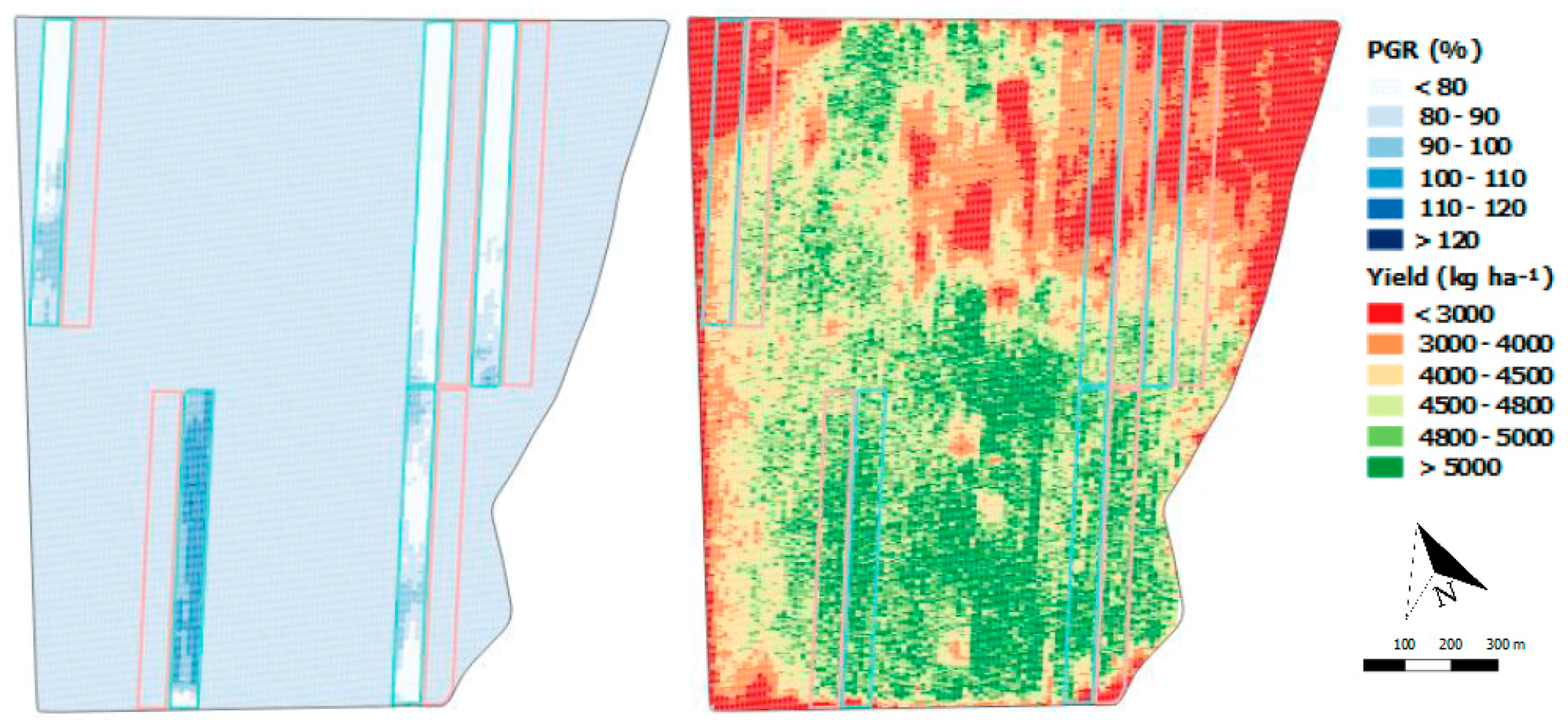
3.4. Input Savings and Yield Response to Variable Rate of PGR
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

References
- FAO. South-South Cooperation for Strengthening the Cotton Sector; FAO: Rome, Italy, 2015. [Google Scholar]
- CONAB (Companhia Nacional de Abastecimento). Acompanhamento da safra brasileira. Décimo Segundo Levant 2017, 4, 1–98. [Google Scholar]
- Echer, F.R.; Rosolem, C.A. Plant growth regulation: A method for fine-tuning mepiquat chloride rates in cotton. Pesqui. Agropecu. Trop. 2017, 47, 286–295. [Google Scholar] [CrossRef]
- Leon, C.T.; Shaw, D.R.; Cox, M.S.; Abshire, M.J.; Ward, B.; Wardlaw, M.C.; Watson, C. Utility of Remote Sensing in Predicting Crop and Soil Characteristics. Precis. Agric. 2003, 4, 359–384. [Google Scholar] [CrossRef]
- Sui, R.; Thomasson, J.A. Ground-based sensing system for cotton nitrogen status determination. Trans. ASABE 2006, 49, 1983–1991. [Google Scholar] [CrossRef]
- Gutierrez, M.; Norton, R.; Thorp, K.R.; Wang, G. Association of spectral reflectance indices with plant growth and lint yield in upland cotton. Crop Sci. 2012, 52, 849–857. [Google Scholar] [CrossRef]
- Ballester, C.; Hornbuckle, J.; Brinkhoff, J.; Smith, J.; Quayle, W. Assessment of in-season cotton nitrogen status and lint yield prediction from unmanned aerial system imagery. Remote Sens. 2017, 9, 1149. [Google Scholar] [CrossRef]
- Souza, H.B.; Baio, F.H.R.; Neves, D.C. Using Passive and Active Multispectral Sensors on the Correlation With the Phenological Indices of Cotton. Eng. Agric. 2017, 37, 782–789. [Google Scholar] [CrossRef]
- Vellidis, G.; Savelle, H.; Ritchie, R.G.; Harris, G.; Hill, R.; Henry, H. NDVI response of cotton to nitrogen application rates in Georgia, USA. In Proceedings of the 8th European Conference on Precision Agriculture, Prague, Czech Republic, 11–14 July 2011; pp. 358–368. [Google Scholar]
- Foote, W.; Edmisten, K.; Wells, R.; Collins, G.; Roberson, G.; Jordan, D.; Fisher, L. Influence of Nitrogen and Mepiquat Chloride on Cotton Canopy Reflectance Measurements. J. Cotton Sci. 2016, 20, 1–7. [Google Scholar]
- Jasper, J.; Reusch, S.; Link, A. Active sensing of the N status of wheat using optimized wavelength combination: Impact of seed rate, variety and growth stage. In Proceedings of the 7th European Conference on Precision Agriculture, Wageningen, The Netherlands, 6–8 July 2009; Volume 9, pp. 23–30. [Google Scholar]
- Bleiholder, H.; Weber, E.; Lancashire, P.D.; Feller, C.; Buhr, L.; Hess, M.; Wicke, H.; Hack, H.; Meier, U.; Klose, R.; et al. Growth stages of mono-and dicotyledonous plants, BBCH monograph. Fed. Biol. Res. Cent. Agric. For. Berl. Braunschw. 2001, 12, 158. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Core Team: Vienna, Austria, 2017. [Google Scholar]
- Baio, F.H.R.; Neves, D.C.; Souza, H.B.; Leal, A.J.F.; Leite, R.C.; Molin, J.P.; Silva, S.P. Variable rate spraying application on cotton using an electronic flow controller. Precis. Agric. 2018, 1–17. [Google Scholar] [CrossRef]
- Spekken, M.; Anselmi, A.A.; Molin, J.P. A simple method for filtering spatial data. Proc. Precis. Agric. 2013, 20, 1531–1538. [Google Scholar] [CrossRef]
- QGIS Development Team. QGIS Geographic Information System; QGIS Development Team: Las Palmas, Spain, 2017. [Google Scholar]
- Antuniassi, U.R.; Baio, F.H.R.; Sharp, T.C. Agricultura de Precisão. In Algodão no Cerrado do Brasil; BDPA: Brasília, Brazil, 2015; pp. 767–806. [Google Scholar]
- Amaral, L.R.; Trevisan, R.G.; Molin, J.P. Canopy sensor placement for variable-rate nitrogen application in sugarcane fields. Precis. Agric. 2017, 1–14. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field * | State | Crop Season | Area (ha) | Row Spacing (m) | Variety | Emergence Date | Seed Density (Seed ha−1) |
|---|---|---|---|---|---|---|---|
| CF1 | GO | 2013/2014 | 93.8 | 0.80 | FM 975 WS | 8 January 2014 | 100,000 |
| NF1 | GO | 2013/2014 | 88.5 | 0.45 | FM 975 WS | 23 January 2014 | 190,000 |
| CF2 | MT | 2014/2015 | 139.7 | 0.76 | DP 1243 B2RF | 7 January 2015 | 95,000 |
| NF2 | MT | 2014/2015 | 203.4 | 0.45 | TMG 81 WS | 22 January 2015 | 205,000 |
| CF3 | MT | 2014/2015 | 142.3 | 0.76 | TMG 81 WS | 17 January 2015 | 100,000 |
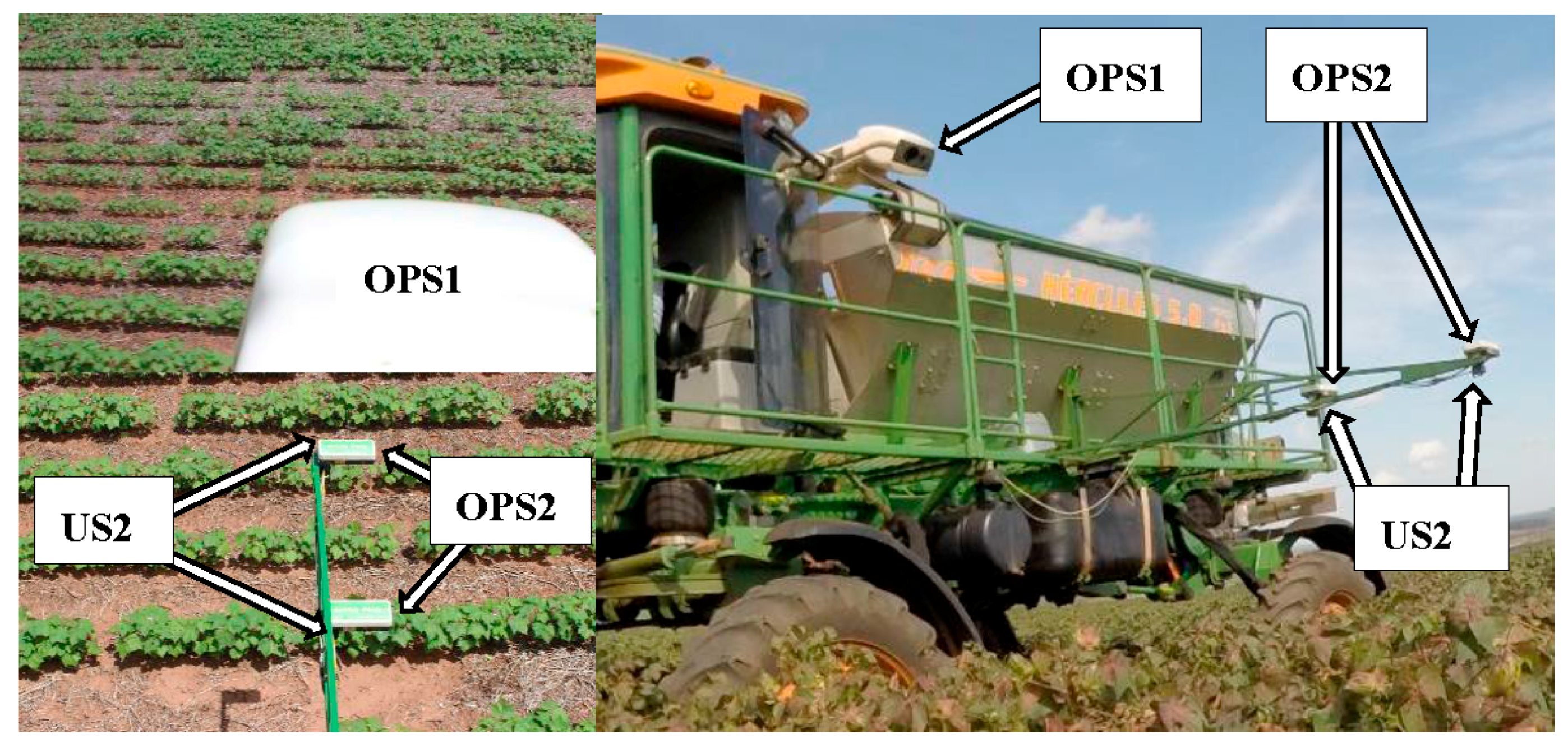
| Sensor System | OPS1 | OPS2 |
|---|---|---|
| Model | N-Sensor ALS | Crop Circle ACS 430 |
| Light source | Xenon | Polychromatic modulated LED |
| Spectral bands | 730 nm (RedEdge) 760 nm (NIR) | 670 nm (RED) 730 nm (RedEdge) 780 nm (NIR) |
| Vegetation index | 100 × | |
| Acquisition frequency | 1 Hz | 5 Hz |
| Mounting height | 2.0–4.0 m | 0.6–1.2 m |
| Field of view | 40°–55° | 45/10° |
| Sensor footprint | 2.0–4.0 m | 0.5–1.0 m |
| Sensor System | US1 | US2 |
|---|---|---|
| Model | Polaroid 6500 | HC-SR04 |
| Working frequency | 49.4 kHz | 40.0 kHz |
| Acquisition frequency | 1 Hz | 5 Hz |
| Mounting height | 0.6–1.2 m | 0.6–1.2 m |
| Field of view | 30° | 20° |
| Sensor footprint | 0.3–0.6 m | 0.2–0.4 m |
| Crop Parameter | Field | Sensor | BBCH * | ||||
|---|---|---|---|---|---|---|---|
| 51 | 61 | 71 | 81 | 95 | |||
| Height | NF1 | OPS1 | 0.70 (0.02) | 0.64 (0.03) | 0.68 (0.05) | 0.62 (0.03) | 0.67 (0.04) |
| OPS2 | 0.18 (0.03) | 0.38 (0.04) | 0.04 (0.08) | 0.37 (0.04) | 0.23 (0.06) | ||
| US1 | 0.02 (0.04) | 0.11 (0.05) | 0.00 (0.08) | 0.29 (0.05) | |||
| CF1 | OPS1 | 0.83 (0.02) | 0.94 (0.03) | 0.90 (0.07) | 0.32 (0.12) | 0.55 (0.10) | |
| OPS2 | 0.52 (0.08) | 0.80 (0.10) | 0.11 (0.13) | 0.48 (0.11) | |||
| US1 | 0.01 (0.05) | 0.75 (0.06) | 0.85 (0.08) | 0.56 (0.09) | |||
| Fresh Biomass | NF1 | OPS1 | 0.78 (0.50) | 0.68 (1.12) | 0.54 (2.73) | 0.27 (2.75) | 0.64 (3.49) |
| OPS2 | 0.43 (0.81) | 0.56 (1.27) | 0.02 (4.00) | 0.28 (2.74) | 0.31 (4.81) | ||
| US1 | 0.04 (1.05) | 0.21 (1.71) | 0.00 (4.04) | 0.00 (2.90) | |||
| CF1 | OPS1 | 0.67 (0.48) | 0.96 (0.76) | 0.90 (2.77) | 0.17 (5.45) | 0.55 (5.08) | |
| OPS2 | 0.57 (2.45) | 0.80 (3.98) | 0.14 (5.55) | 0.48 (5.44) | |||
| US1 | 0.01 (0.71) | 0.70 (1.94) | 0.71 (4.82) | 0.39 (4.67) | |||
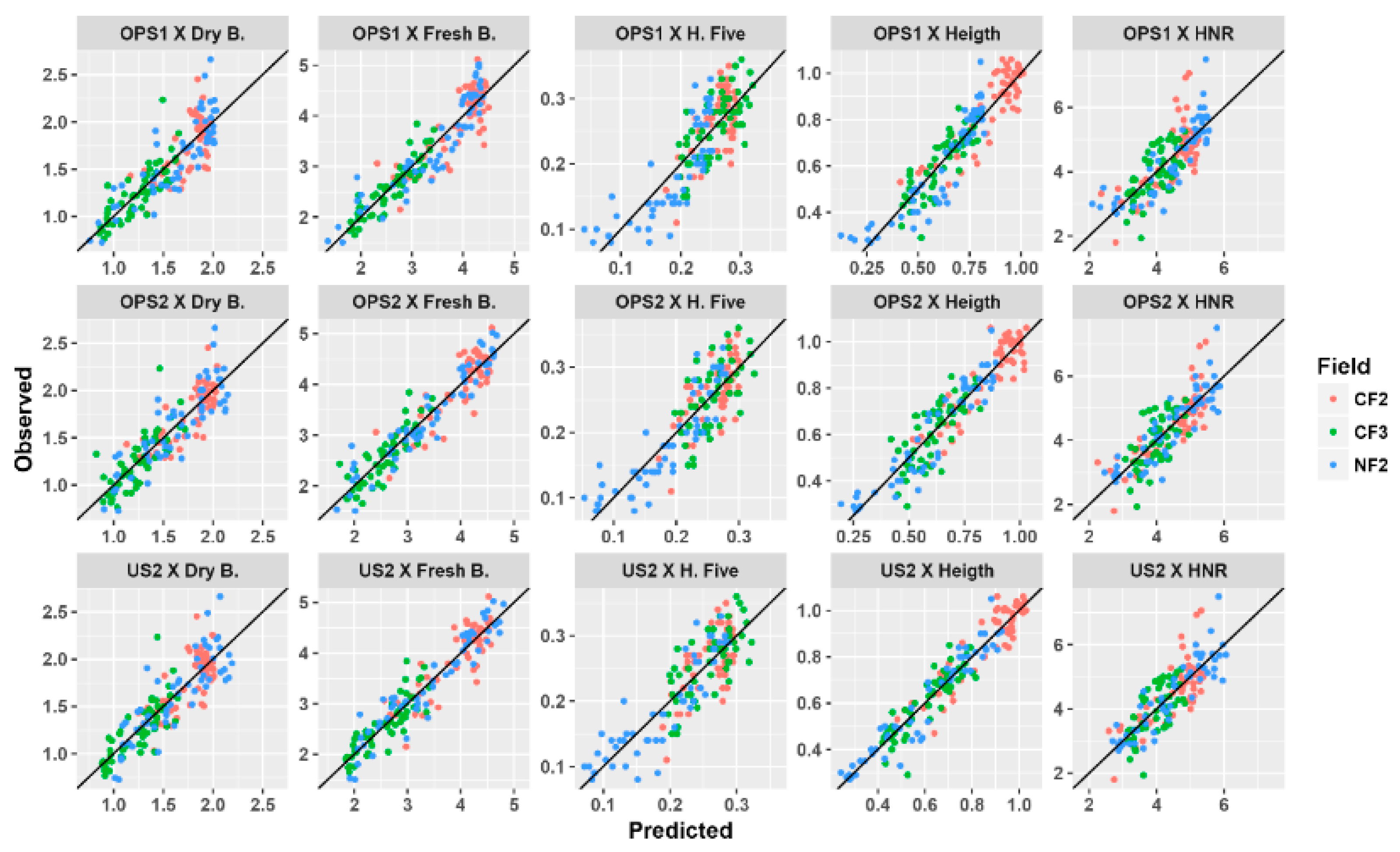
| Field | Sensor * | Dry B. | Fresh B. | H. Five | Height | HNR |
|---|---|---|---|---|---|---|
| CF2 | OPS1 | 0.46 (0.15) | 0.66 (0.31) | 0.38 (0.02) | 0.77 (0.07) | 0.50 (0.51) |
| OPS2 | 0.65 (0.14) | 0.74 (0.29) | 0.51 (0.02) | 0.81 (0.07) | 0.69 (0.47) | |
| US2 | 0.52 (0.15) | 0.73 (0.29) | 0.41 (0.02) | 0.84 (0.06) | 0.61 (0.49) | |
| CF3 | OPS1 | 0.65 (0.14) | 0.81 (0.21) | 0.50 (0.02) | 0.72 (0.06) | 0.44 (0.37) |
| OPS2 | 0.58 (0.14) | 0.71 (0.24) | 0.38 (0.02) | 0.55 (0.07) | 0.37 (0.36) | |
| US2 | 0.61 (0.14) | 0.75 (0.23) | 0.53 (0.02) | 0.78 (0.05) | 0.43 (0.37) | |
| NF2 | OPS1 | 0.71 (0.19) | 0.85 (0.33) | 0.66 (0.04) | 0.82 (0.08) | 0.73 (0.50) |
| OPS2 | 0.74 (0.19) | 0.91 (0.27) | 0.80 (0.03) | 0.89 (0.07) | 0.78 (0.47) | |
| US2 | 0.71 (0.19) | 0.90 (0.27) | 0.79 (0.03) | 0.92 (0.06) | 0.81 (0.45) |
| Field | Application | BBCH | Product | Average Rate (L ha−1) | |
|---|---|---|---|---|---|
| Fixed Rate | Variable Rate | ||||
| NF2 | 1st PGR | 51 | PIX HC | 0.030 | 0.026 |
| 2nd PGR | 61 | PIX HC | 0.050 | 0.043 | |
| 3rd PGR | 71 | PIX HC | 0.080 | 0.069 | |
| 4th PGR | 76 | PIX HC | 0.120 | 0.104 | |
| 5th PGR | 81 | PIX HC | 0.150 | 0.131 | |
| Defoliant | 98 | DROPP ULTRA | 0.400 | 0.312 | |
| Boll Opener | 98 | FINISH | 2.000 | 1.560 | |
| CF3 | 1st PGR | 71 | PIX HC | 0.050 | 0.046 |
| 2nd PGR | 76 | PIX HC | 0.080 | 0.053 | |
| 3rd PGR | 81 | PIX HC | 0.120 | 0.080 | |
| Defoliant | 98 | DROPP ULTRA | 0.500 | 0.458 | |
| Boll Opener | 98 | FINISH | 2.500 | 2.292 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trevisan, R.G.; Vilanova Júnior, N.S.; Eitelwein, M.T.; Molin, J.P. Management of Plant Growth Regulators in Cotton Using Active Crop Canopy Sensors. Agriculture 2018, 8, 101. https://doi.org/10.3390/agriculture8070101
Trevisan RG, Vilanova Júnior NS, Eitelwein MT, Molin JP. Management of Plant Growth Regulators in Cotton Using Active Crop Canopy Sensors. Agriculture. 2018; 8(7):101. https://doi.org/10.3390/agriculture8070101
Chicago/Turabian StyleTrevisan, Rodrigo Gonçalves, Natanael Santana Vilanova Júnior, Mateus Tonini Eitelwein, and José Paulo Molin. 2018. "Management of Plant Growth Regulators in Cotton Using Active Crop Canopy Sensors" Agriculture 8, no. 7: 101. https://doi.org/10.3390/agriculture8070101
APA StyleTrevisan, R. G., Vilanova Júnior, N. S., Eitelwein, M. T., & Molin, J. P. (2018). Management of Plant Growth Regulators in Cotton Using Active Crop Canopy Sensors. Agriculture, 8(7), 101. https://doi.org/10.3390/agriculture8070101