
Research on Energy Distribution Strategy of Tandem Hybrid Tractor Based on the Pontryagin Minimum Principle


Abstract
1. Introduction
2. Materials and Methods
2.1. Performance of the Main Power Components of the Test Bench
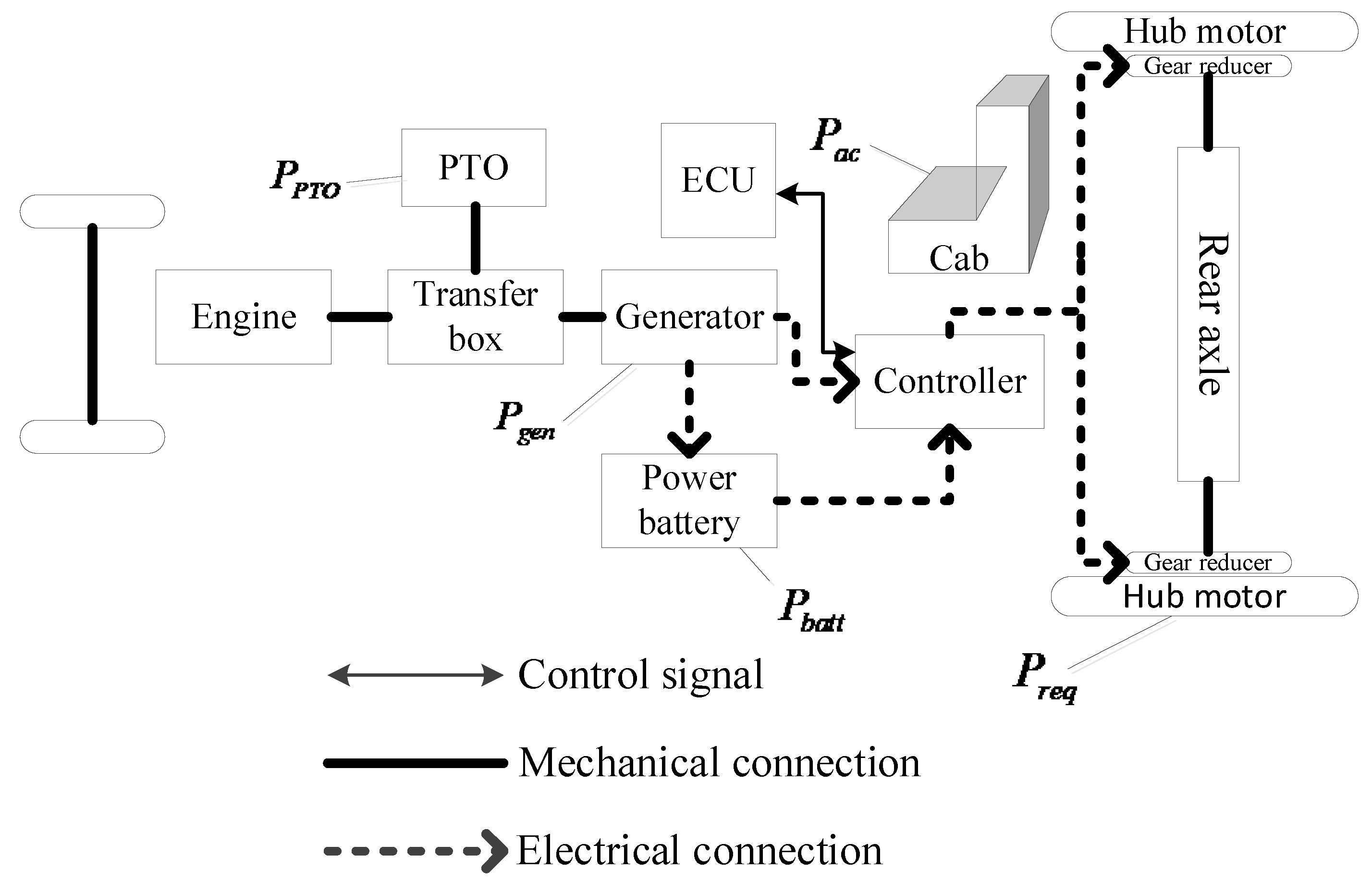
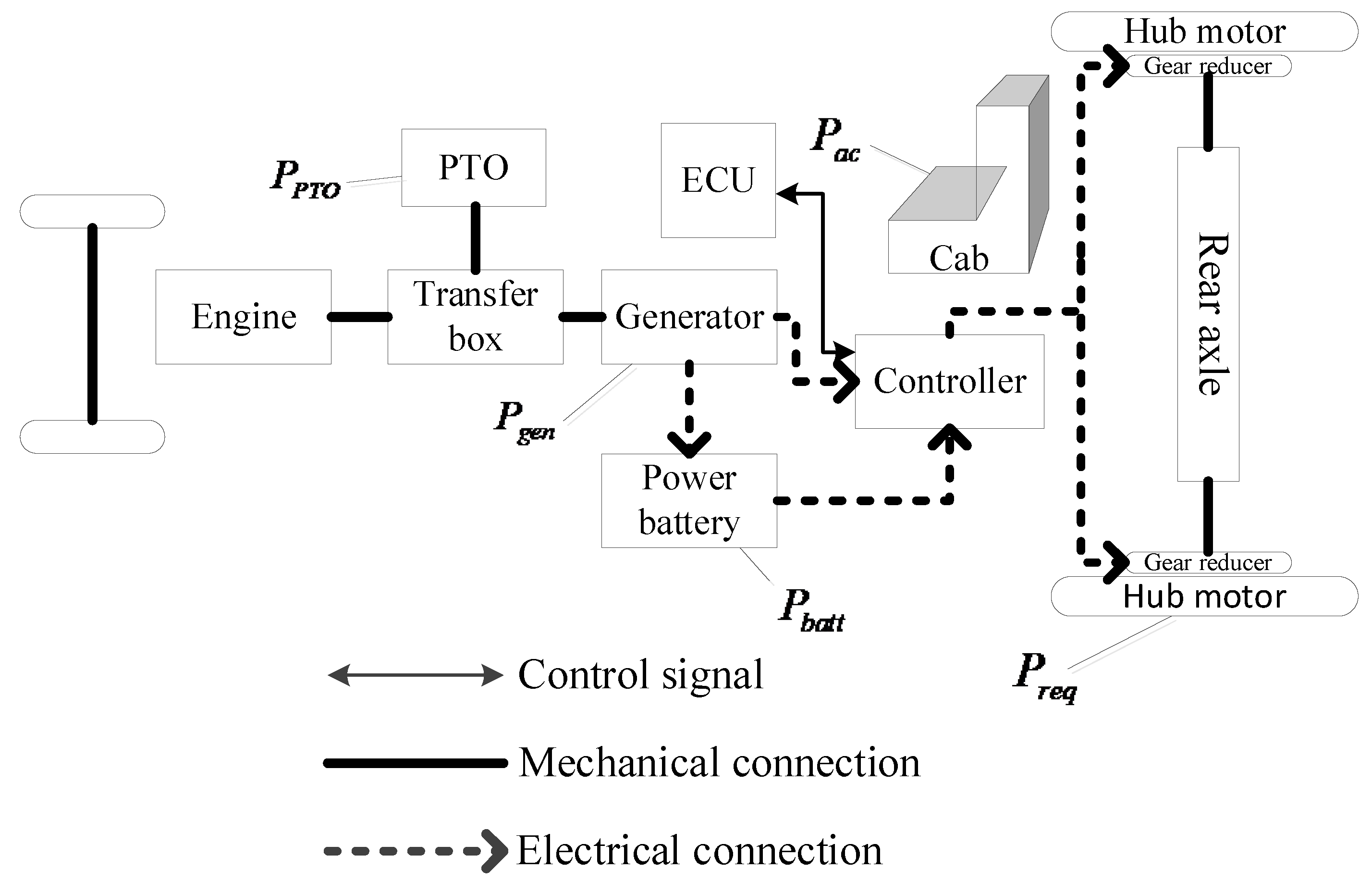
2.1.1. Dynamic Model Design of the Whole Vehicle
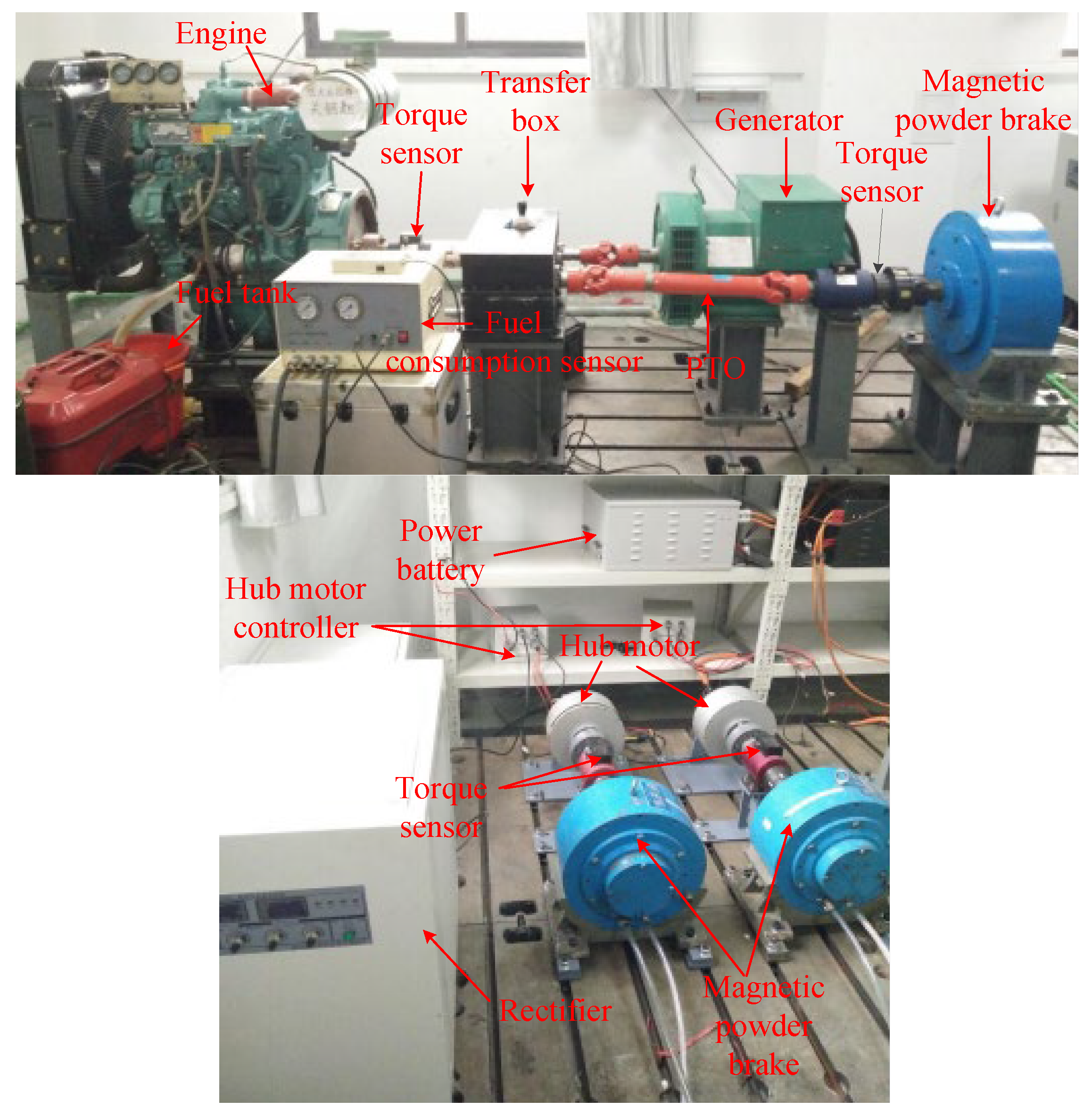
2.1.2. The Construction of the Test Bench
- (1)
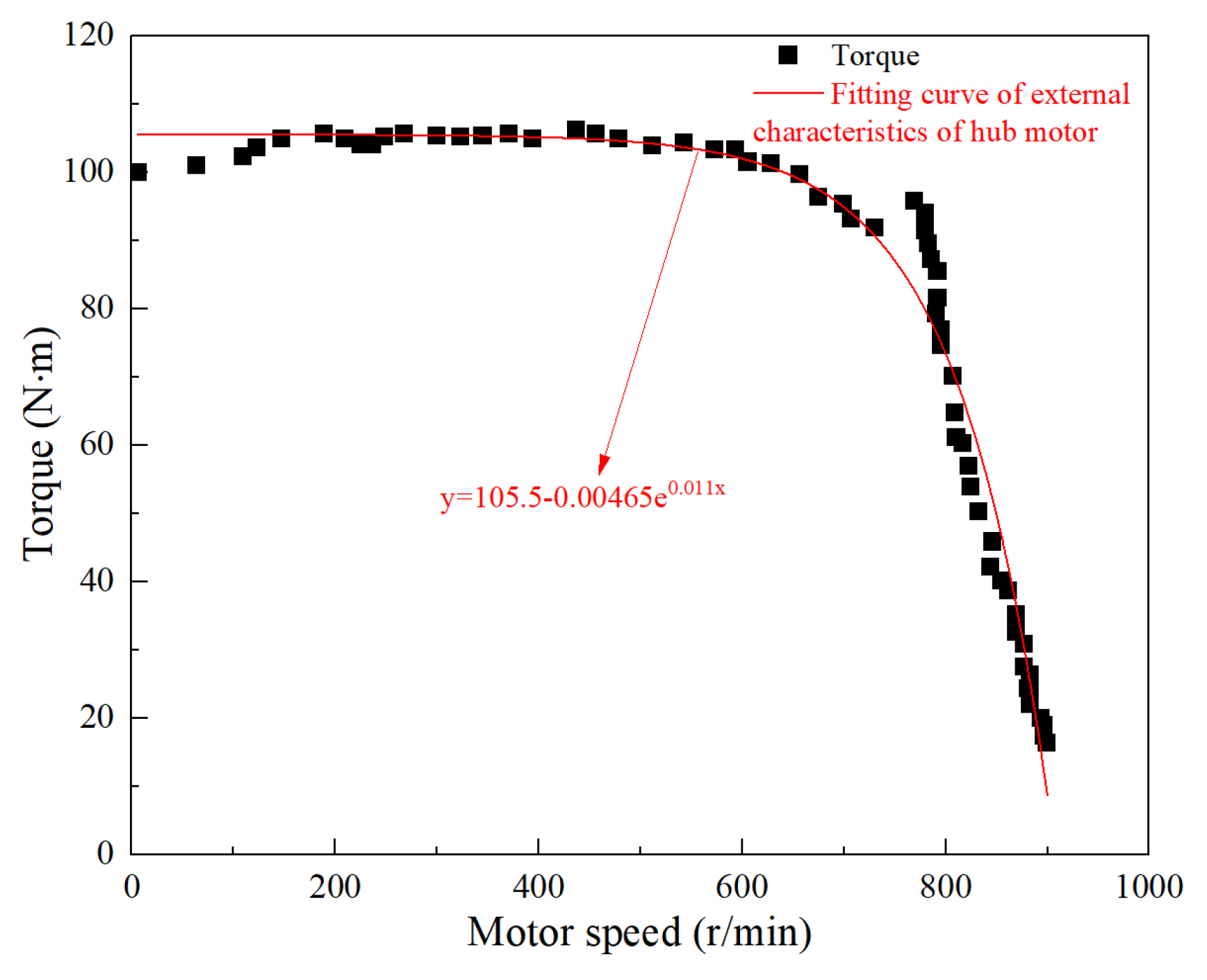
- The external characteristic of hub motor
- (2)
- Optimal working curve of engine/generator set
- (3)
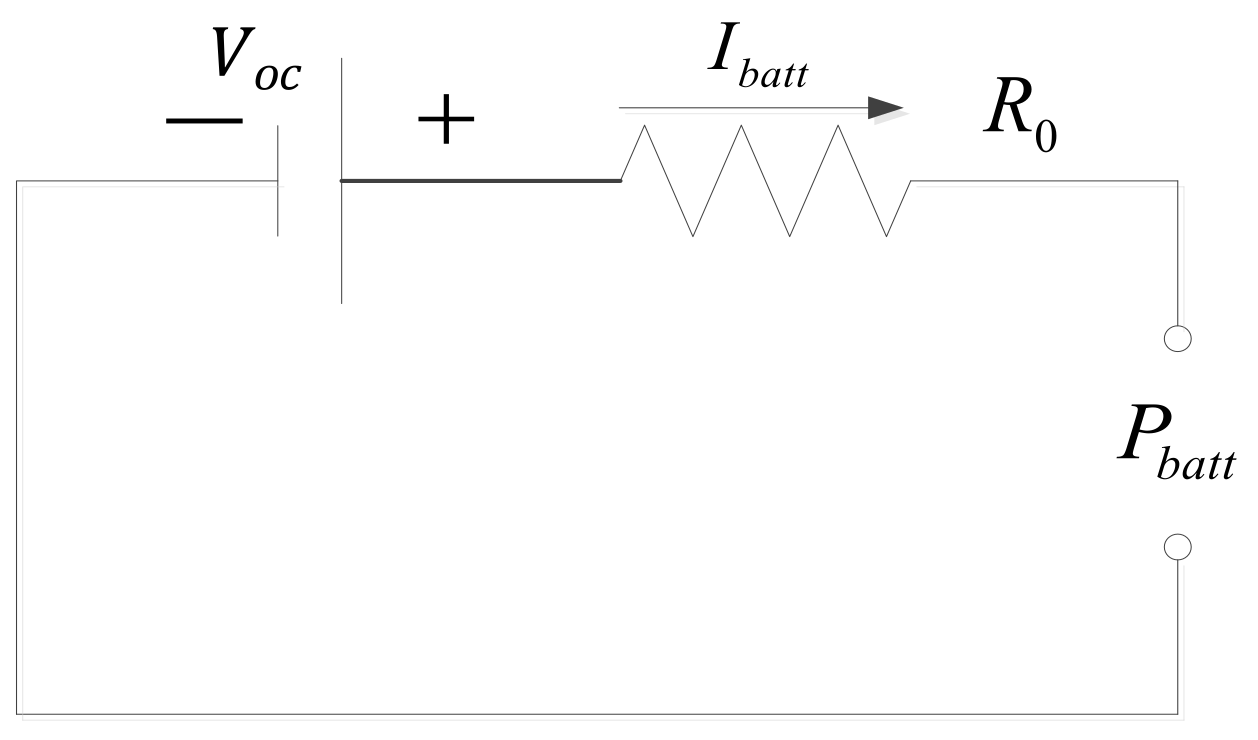
- Characteristics of the power battery
2.2. Global Optimization Energy Distribution Strategy Based on PMP
2.2.1. Energy Distribution Model of Tandem Hybrid Tractor
- (1)
- Objective function
- (2)
- State variable
- (3)
- Variable constraints
- (4)
- Construct the Hamilton function of energy distribution
- (5)
- Costate equation of Hamilton function
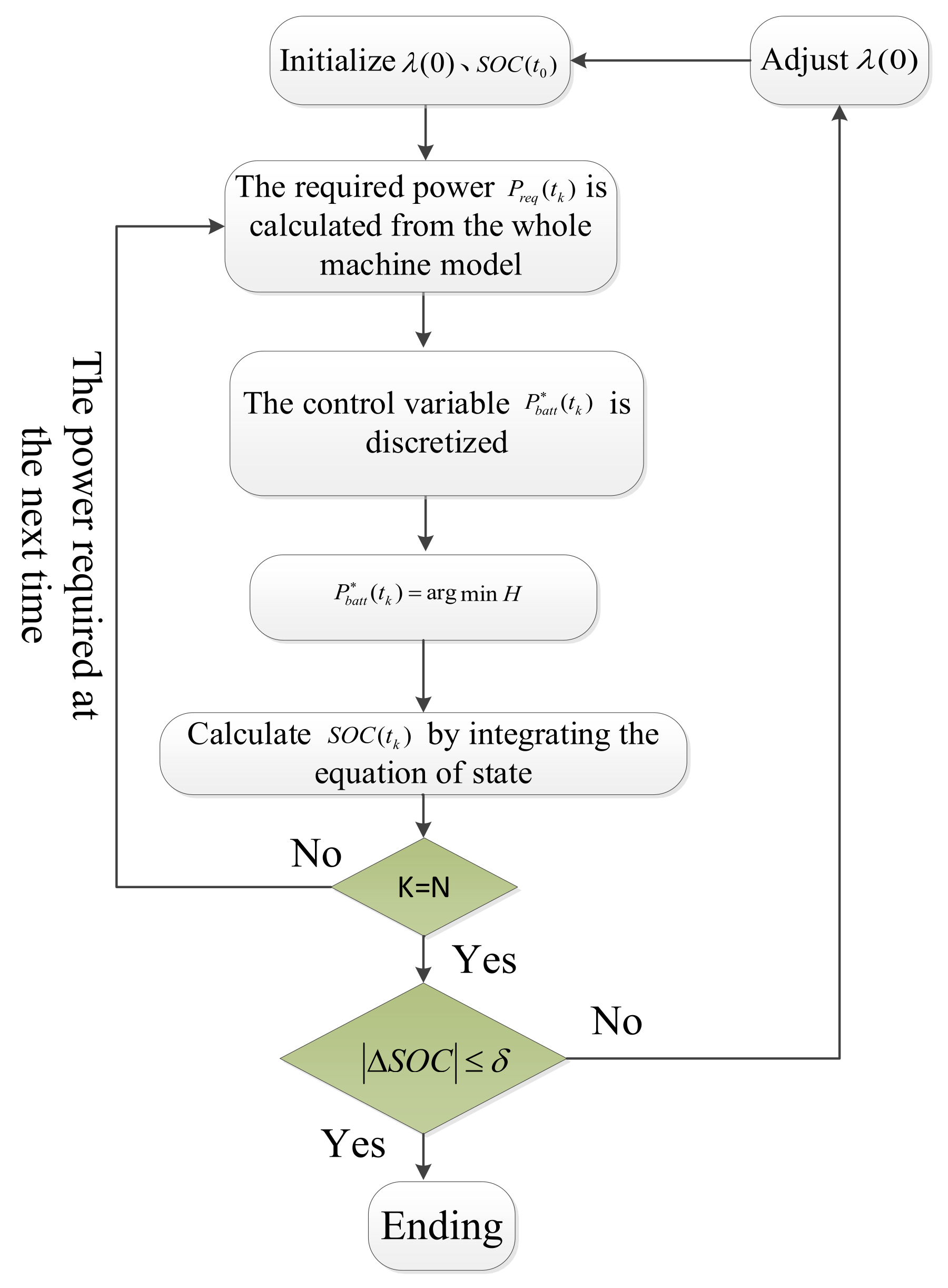
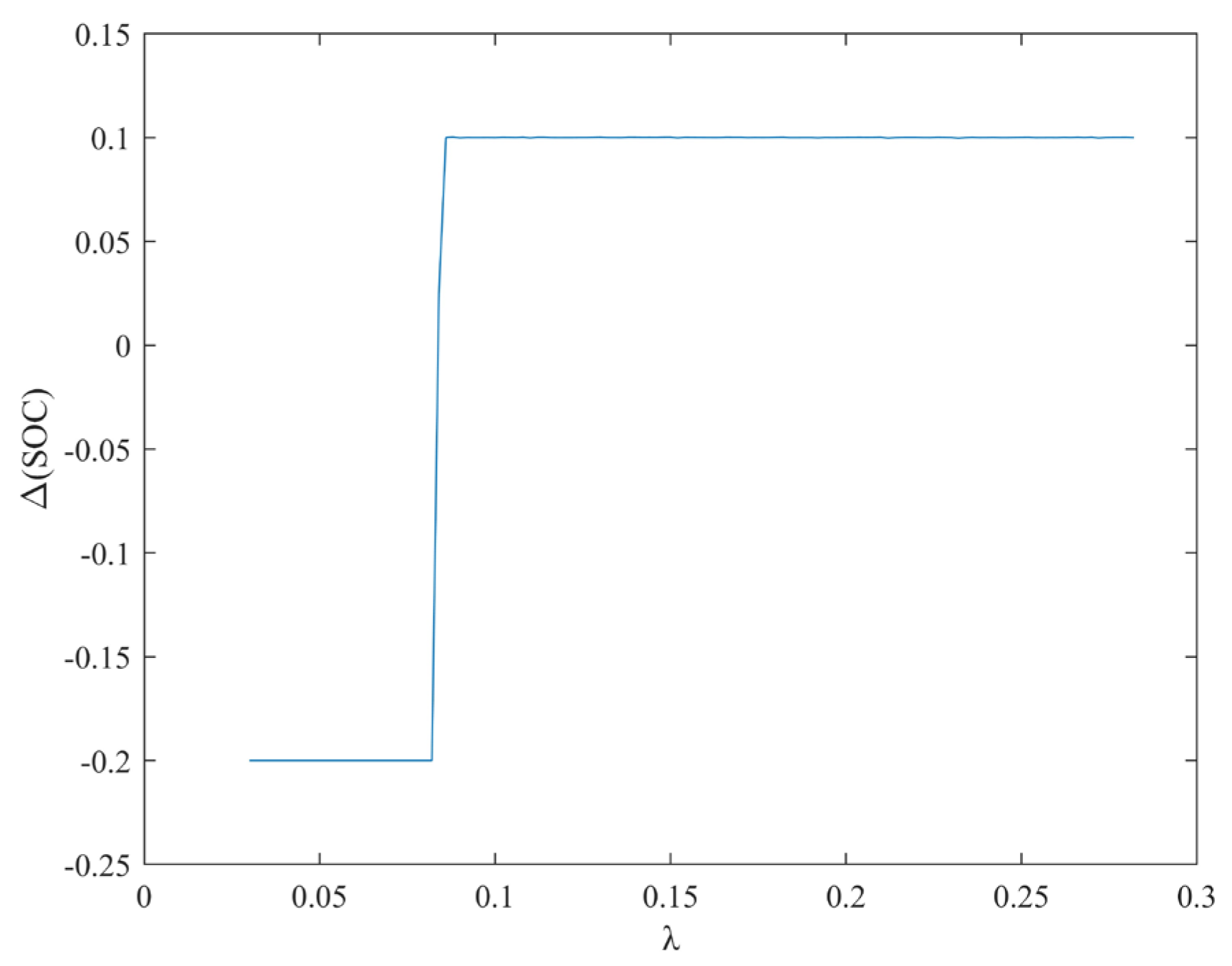
2.2.2. Solving the Optimal Solution of Global Energy Distribution
2.3. Analysis of Transport Operation Characteristics of Hybrid Tractors
2.3.1. Transportation Operation Resistance
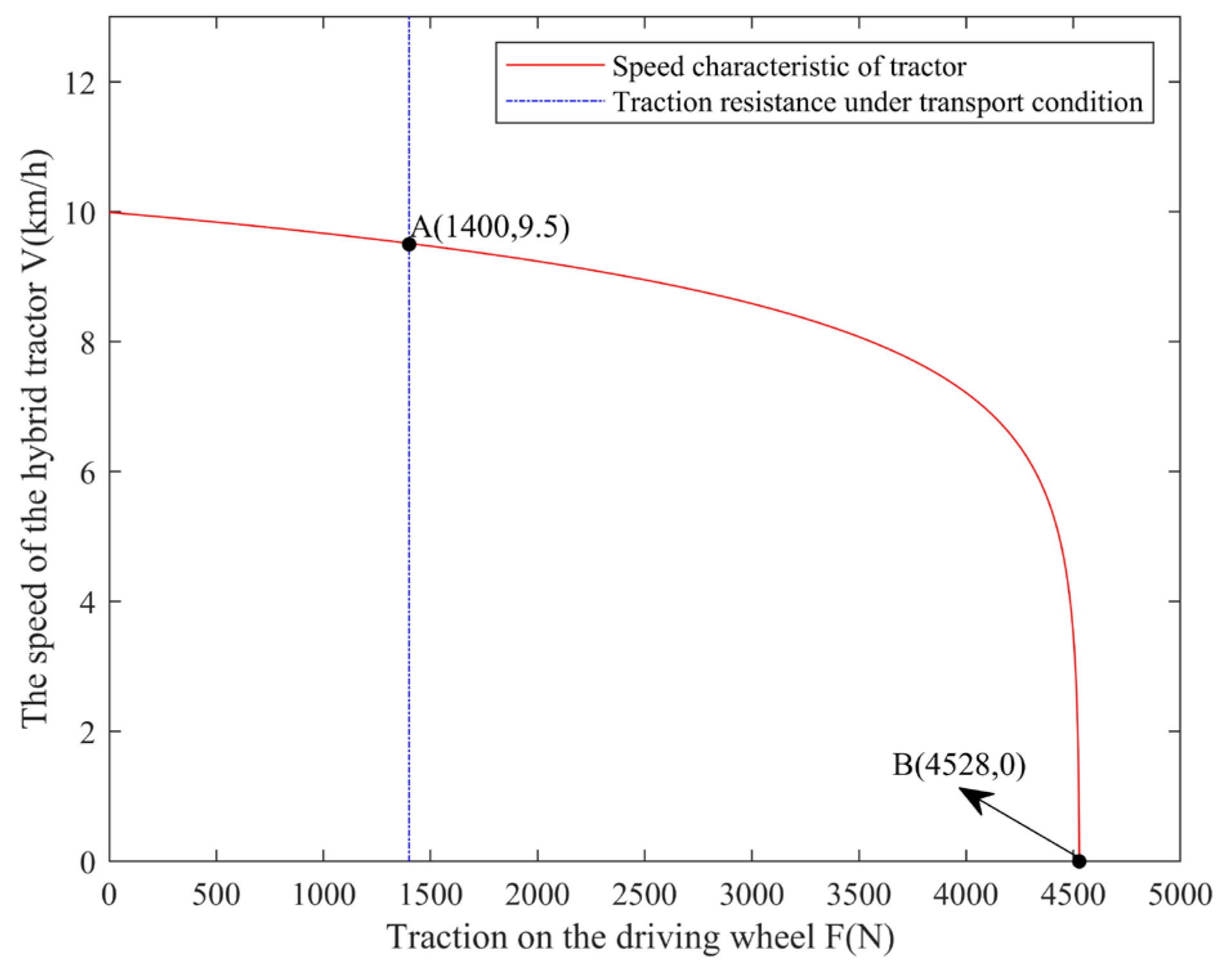
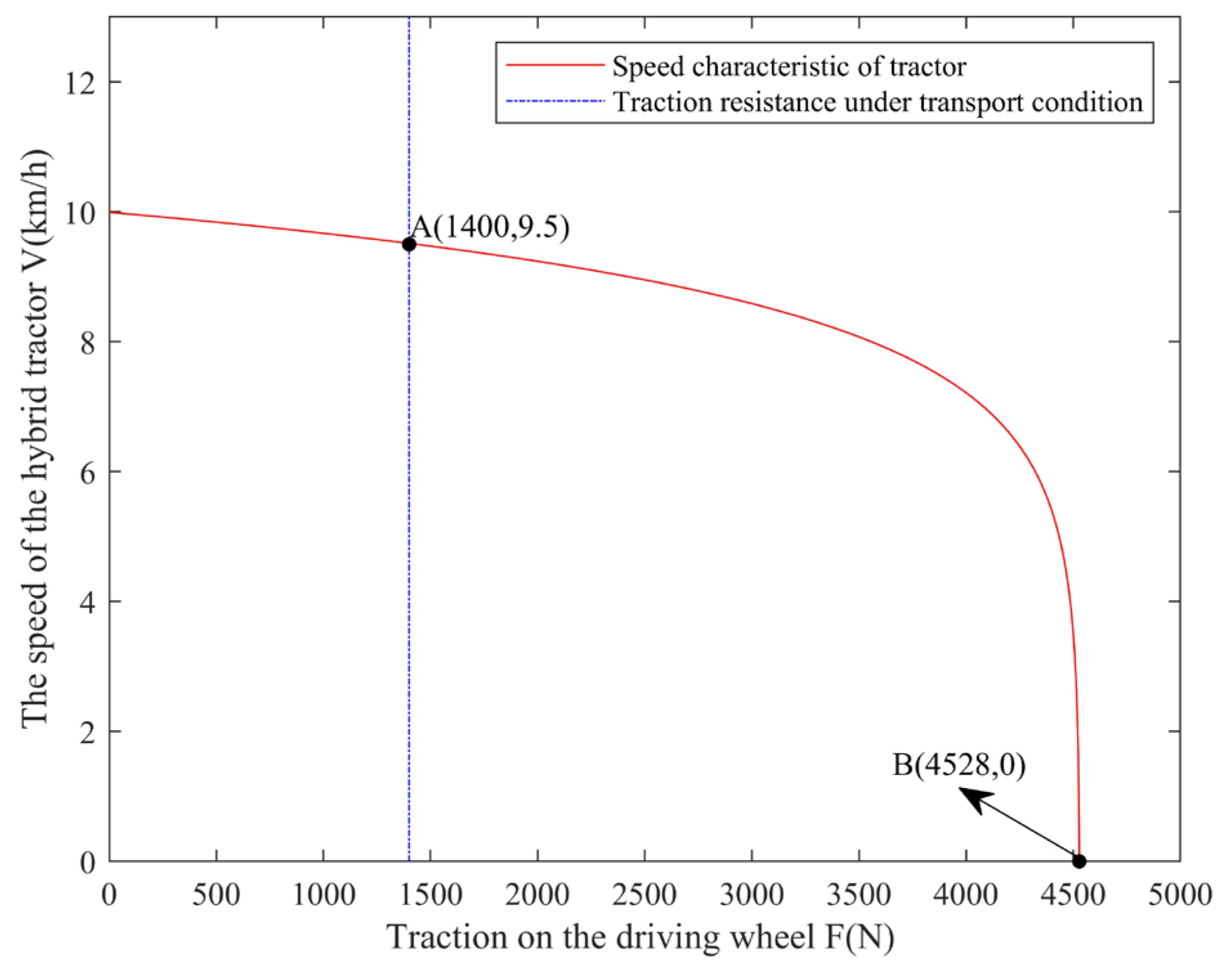
2.3.2. The Speed Characteristics of Transport Operation
3. Results and Discussion
3.1. Simulation Model
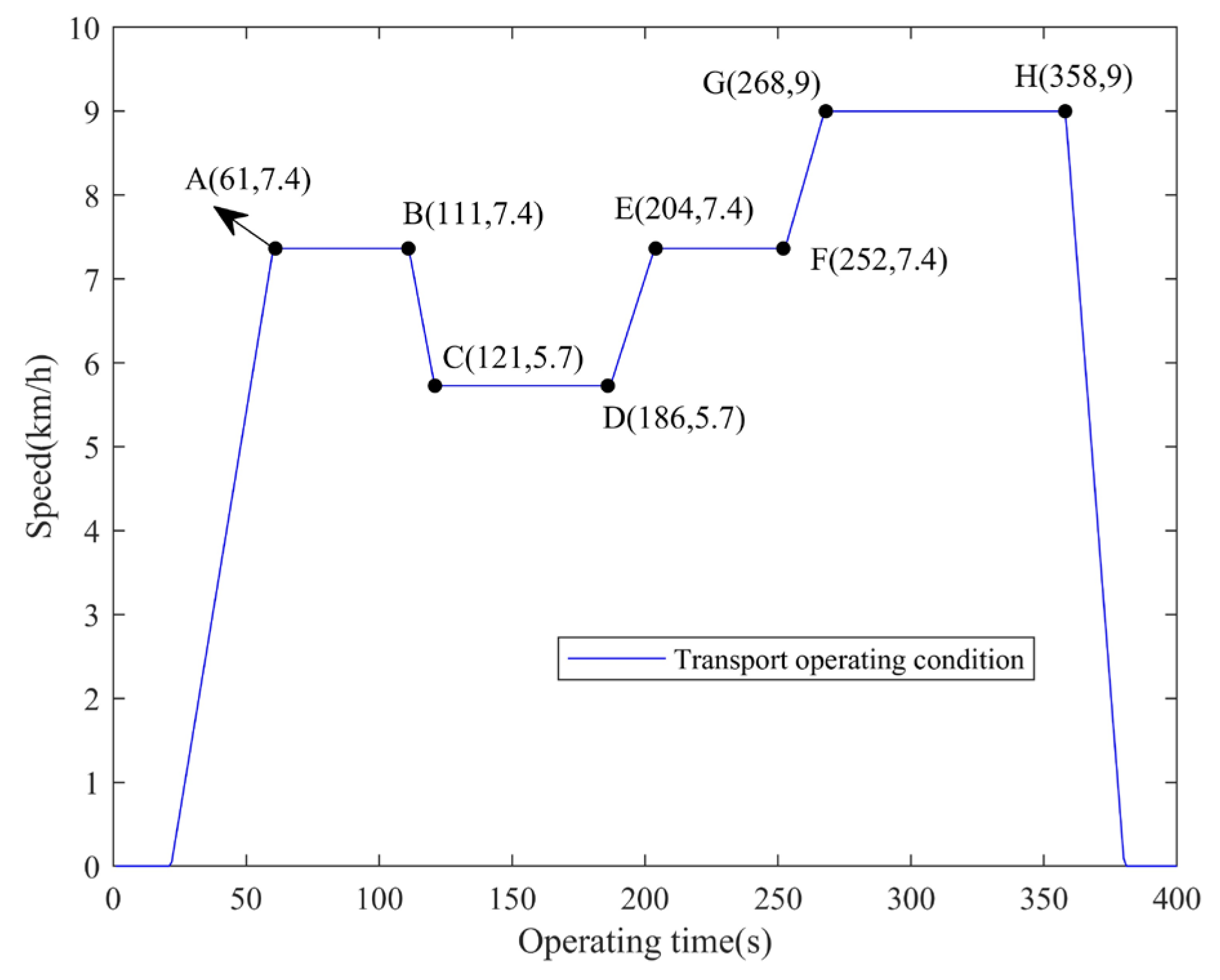
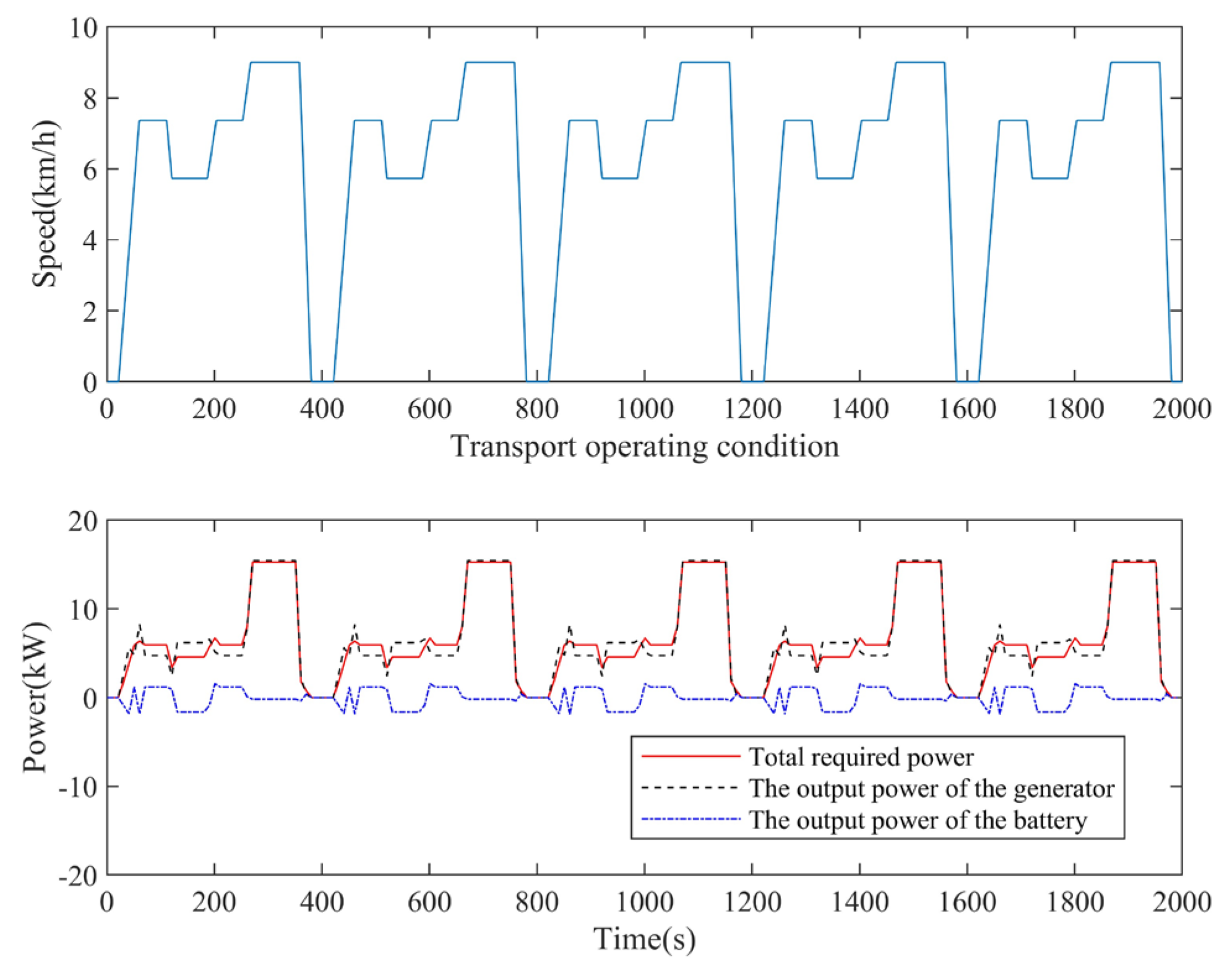
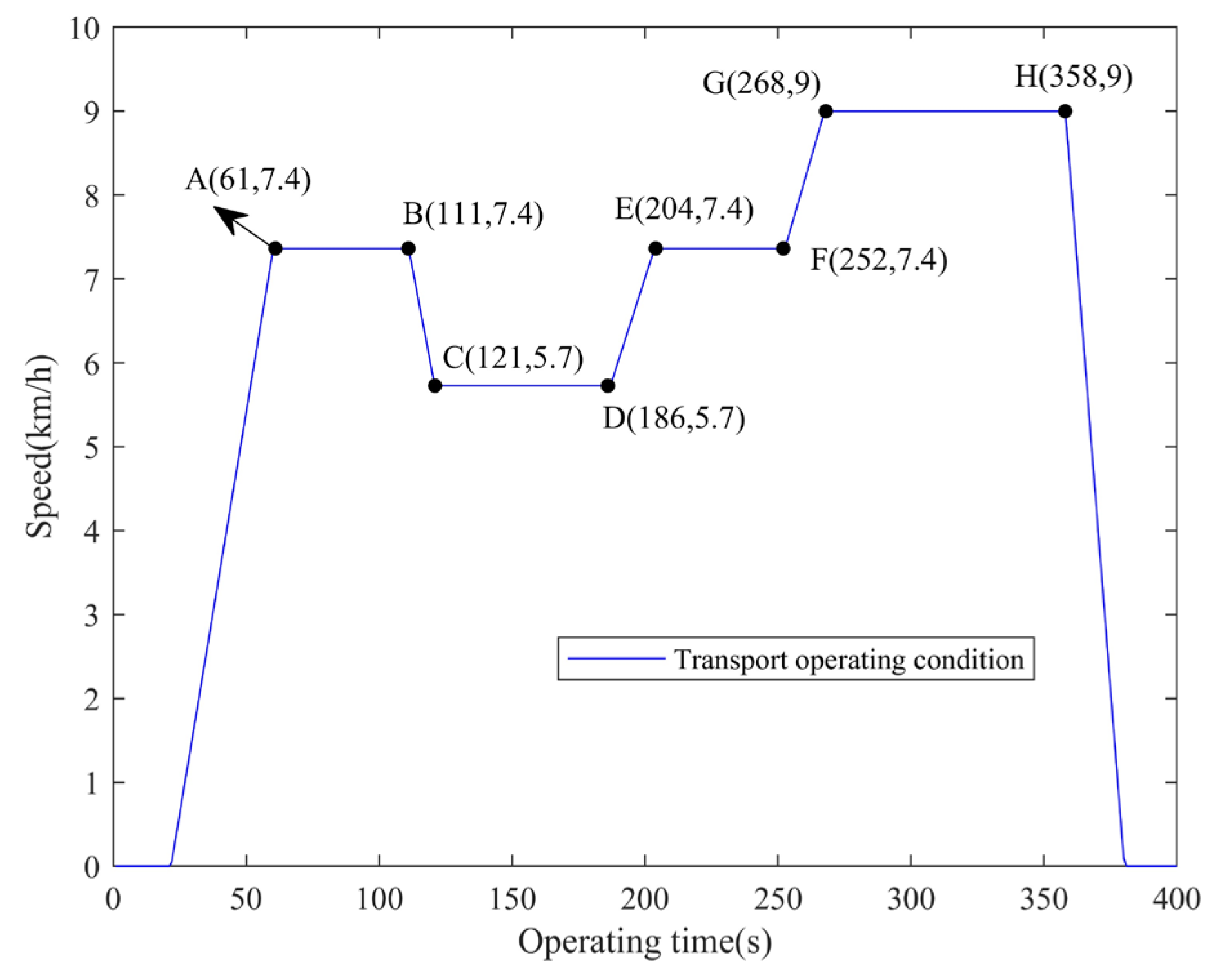
3.2. Setting of Transport Operating Condition
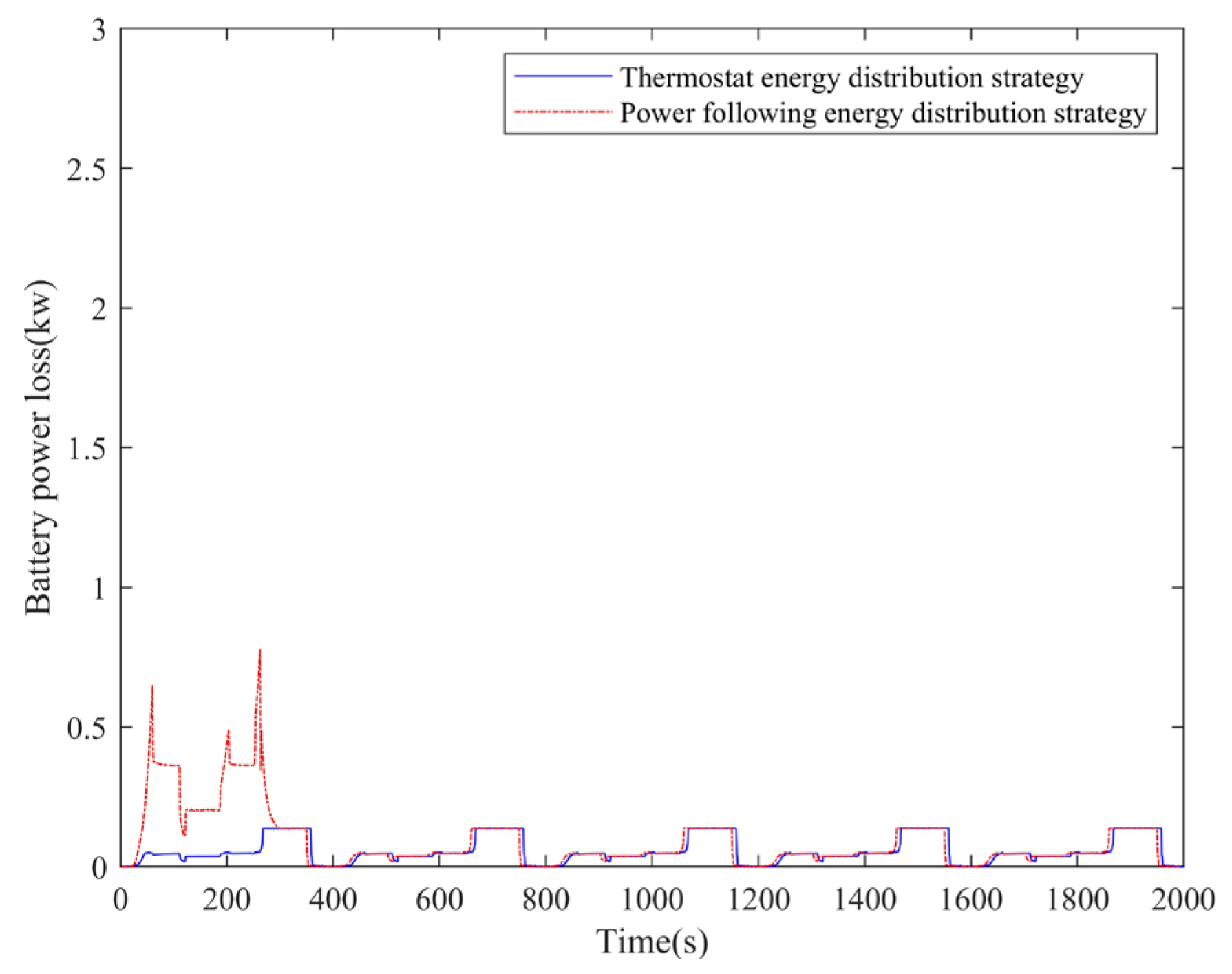
3.3. Results Based on Thermostat and Power-Following Energy Distribution Strategy
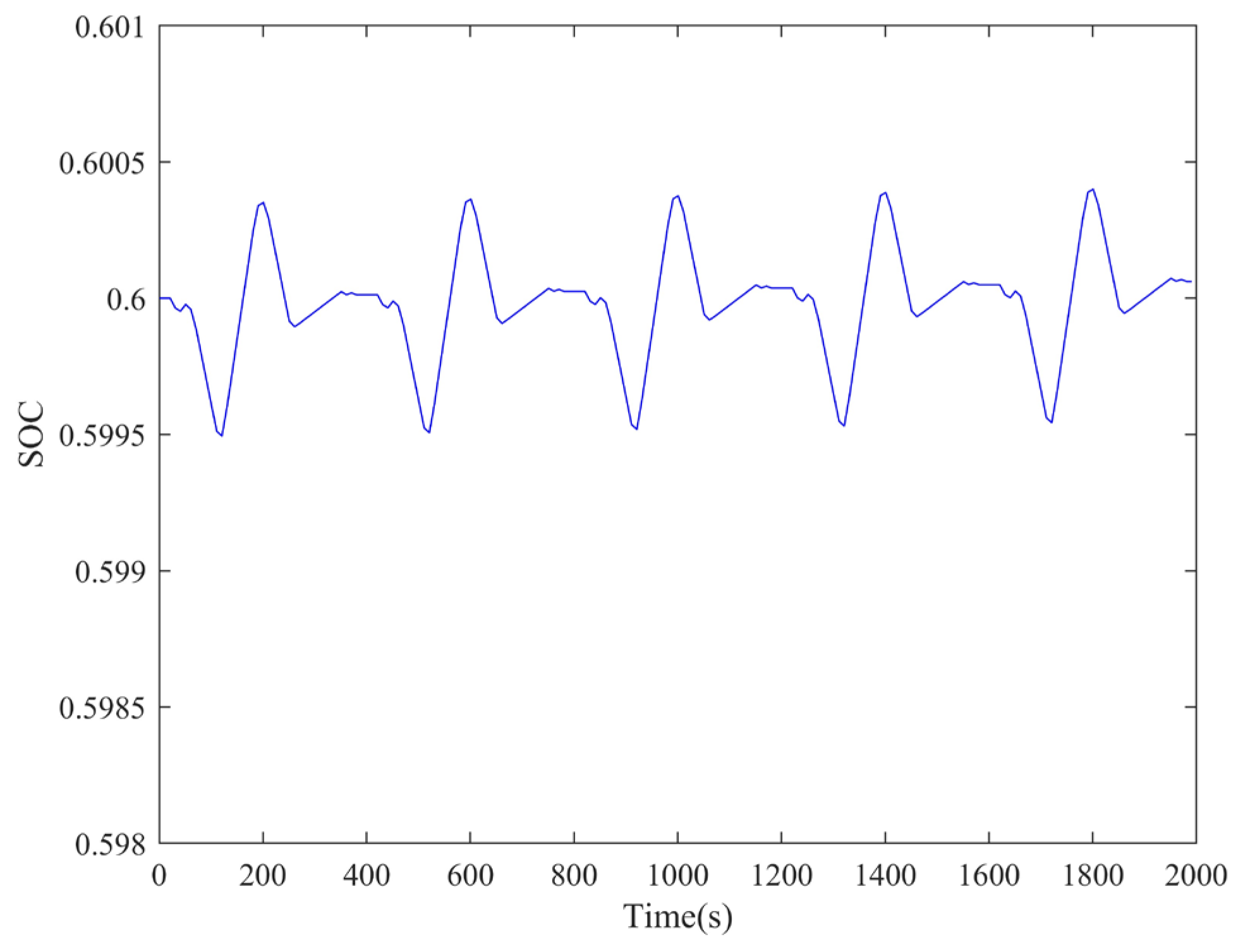
3.4. Results of Global Optimization Energy Distribution Based on PMP
3.5. Comparative Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, M.; Lei, S.; Zhao, J.; Meng, Z.; Zhao, C.; Xu, L. Review on development and Research Status of Electric Tractor. Trans. Chin. Soc. Agric. Mach. 2022, 53, 348–364. [Google Scholar]
- Savickas, D.; Steponavičius, D.; Kemzūraitė, A. A novel approach for analysing environmental sustainability aspects of combine harvester through telematics data. Part I: Evaluation and analysis of field tests. Precis. Agric. 2024, 25, 100–118. [Google Scholar] [CrossRef]
- Li, Y.; Liu, M.; Wang, Y.; Xu, L.; Lei, S. Energy Management Optimization and Validation of a Hydrogen Fuel Cell-Powered Agricultural Tractor Based on Hierarchical Dynamic Programming. IEEE Access 2024, 12, 21382–21401. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, N. Energy Management Strategy and Swarm Intelligence Optimization for Hybrid Electric Vehicles; Tsinghua University Press: Beijing, China, 2023; pp. 39–40. [Google Scholar]
- Hu, X.; Tang, X.; Liu, T. Hybrid Electric Vehicles Energy Management Strategies; China Machine Press: Beijing, China, 2020; pp. 33–34. [Google Scholar]
- Sorrentino, M.; Rizzo, G.; Arsie, I. Analysis of a rule-based control strategy for on-board energy management of series hybrid vehicles. Control Eng. Pract. 2011, 19, 1433–1441. [Google Scholar] [CrossRef]
- Zhang, E. Research on Energy Distribution Control Strategy of Parallel Hybrid Vehicle. Master’s Thesis, Shenyang University of Technology, Shenyang, China, 2019. [Google Scholar]
- Gan, W. Energy Management Strategy and Transmission Parameter Optimization of Parallel Hybrid Electric Vehicle Based on Dynamic Programming. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2017. [Google Scholar]
- Hu, X. Research on PHEV Energy Management Strategy Based on PSO and Neural Network. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2011. [Google Scholar]
- Wu, Z. Research on Energy Management Strategy of Hybrid Electric Vehicle Based on Neural Network and PMP. Master’s Thesis, Southeast University, Nanjing, China, 2018. [Google Scholar]
- Lijun, Q.; Lihong, Q.; Fulong, X.; Peng, C.; Jinbo, W. Energy management control strategy and optimization of plug-in four-wheel drive hybrid electric vehicle. J. Agric. Eng. 2015, 31, 68–76. [Google Scholar]
- Zhang, Y.; Liu, H.P.; Guo, Q. Varying-Domain Optimal Management Strategy for Parallel Hybrid Electric Vehicles. IEEE Trans. Veh. Technol. 2014, 63, 603–616. [Google Scholar] [CrossRef]
- Zhou, Y. Research on Optimal Control Method of Hybrid Electric Vehicle. Master’s Thesis, Hunan University: Changsha, China, 2018. [Google Scholar]
- Xu, W.; Xu, L.; Liu, M.; Zhang, Y.; Song, L. Research on energy management strategy of hybrid tractor based on layered decoupling. J. Phys. Conf. Ser. 2022, 2343, 012018. [Google Scholar] [CrossRef]
- Zhu, Z.; Zeng, L.; Chen, L.; Zou, R.; Cai, Y. Fuzzy Adaptive Energy Management Strategy for a Hybrid Agricultural Tractor Equipped with HMCVT. Agriculture 2022, 12, 1986. [Google Scholar] [CrossRef]
- Zhang, J.; Feng, G.; Liu, M.; Yan, X.; Xu, L.; Shang, C. Research on Global Optimal Energy Management Strategy of Agricultural Hybrid Tractor Equipped with CVT. World Electr. Veh. J. 2023, 14, 127. [Google Scholar] [CrossRef]
- Marzougui, H.; Kadri, A.; Martin, J.P.; Amari, M.; Pierfederici, S.; Bacha, F. Implementation of energy management strategy of hybrid power source for electrical vehicle. Energy Convers. Manag. 2019, 195, 830–843. [Google Scholar] [CrossRef]
- Francesco, M. A Model-Based Design Approach for a Parallel Hybrid Electric Tractor Energy Management Strategy Using Hardware in the Loop Technique. Vehicles 2020, 3, 1–19. [Google Scholar]
- Ghobadpour, A.; Mousazadeh, H.; Kelouwani, S.; Zioui, N.; Kandidayeni, M.; Boulon, L. An intelligent energy management strategy for an off-road plug-in hybrid electric tractor based on farm operation recognition. IET Electr. Syst. Transp. 2021, 11, 333–347. [Google Scholar] [CrossRef]
- Lombardi, S.; Di Ilio, G.; Tribioli, L.; Jannelli, E. Optimal design of an adaptive energy management strategy for a fuel cell tractor operating in ports. Appl. Energy 2023, 352, 121917. [Google Scholar] [CrossRef]
- Zeng, X.; Gong, W. ADVISOR2002 Electric Vehicle Simulation and Redevelopment Application; Machinery Industry Press: Beijing, China, 2017; pp. 1–5. [Google Scholar]
- Tong, G.; Guan, J. Parameter design of FSEC racing car power system based on ADVISOR. J. Shenyang Univ. Aeronaut. Astronaut. 2017, 34, 38–43. [Google Scholar]
- Xu, S.; Yan, Y. Research and simulation of energy control strategy for pure electric vehicle based on advisor. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019; Volume 252, p. 032034. [Google Scholar]
- Luoyang Tractor Research Institute, Ministry of Mechanical and Electronic Industry. Tractor Design Manual; Machinery Industry Press: Beijing, China, 1994; p. 69. [Google Scholar]
- Gao, H. Research on Electric Tractor Drive System. Ph.D. Thesis, Nanjing Agricultural University, Nanjing, China, 2008. [Google Scholar]
- Sun, Y. Research on Energy Management of Pure Electric Tractor Based on Super Capacitor Auxiliary Energy. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Quantity | Rated Torque (N·m) | Field Current (A) | Allowable Slip Power (kW) | Cooling Mode |
|---|---|---|---|---|---|
| CZ-50 | 2 | 500 | 2.5 | 14 | Water-cooling |
| Region | Paved Road | Smooth Road | Unpaved Road | Field Road |
|---|---|---|---|---|
| Plain | 4 | 5~6 | 7 | 8 |
| Hill | 5 | 6~7 | 8 | 10 |
| Mountainous region | 7 | 7~8 | 8~10 | 12 |
| Parameter Name | Parameter | Value | Unit |
|---|---|---|---|
| Drag coefficient | veh_CD | 0 | - |
| Windward area | veh_FA | 0 | m2 |
| Percentage of front axle load to total machine mass | veh_front_wt_frac | 0.4 | - |
| Height of center of mass | veh_cg_height | 0.85 | m |
| wheelbase | veh_wheelbase | 2 | m |
| Overall quality | Veh_mass | 1600 | kg |
| Maximum loading mass | veh_cargo_mass | 300 | kg |
| Energy Distribution Strategy | Fuel Consumption (L/100 km) | Power Battery Pack Loss (kW) | Fuel Consumption Reduction (%) |
|---|---|---|---|
| Thermostat | 17.26 | 0.14 | 32.91 |
| Power-following | 15.67 | 0.8 | 26.10 |
| PMP | 11.58 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, R.; Wang, L.; Deng, X.; Su, C.; Fang, S.; Lu, Z. Research on Energy Distribution Strategy of Tandem Hybrid Tractor Based on the Pontryagin Minimum Principle. Agriculture 2024, 14, 440. https://doi.org/10.3390/agriculture14030440
Zhou R, Wang L, Deng X, Su C, Fang S, Lu Z. Research on Energy Distribution Strategy of Tandem Hybrid Tractor Based on the Pontryagin Minimum Principle. Agriculture. 2024; 14(3):440. https://doi.org/10.3390/agriculture14030440
Chicago/Turabian StyleZhou, Rundong, Lin Wang, Xiaoting Deng, Chao Su, Song Fang, and Zhixiong Lu. 2024. "Research on Energy Distribution Strategy of Tandem Hybrid Tractor Based on the Pontryagin Minimum Principle" Agriculture 14, no. 3: 440. https://doi.org/10.3390/agriculture14030440
APA StyleZhou, R., Wang, L., Deng, X., Su, C., Fang, S., & Lu, Z. (2024). Research on Energy Distribution Strategy of Tandem Hybrid Tractor Based on the Pontryagin Minimum Principle. Agriculture, 14(3), 440. https://doi.org/10.3390/agriculture14030440