


Application of Disturbance Observer-Based Fast Terminal Sliding Mode Control for Asynchronous Motors in Remote Electrical Conductivity Control of Fertigation Systems


Abstract
1. Introduction
2. Materials and Methods
2.1. Description of the Remote Conductivity Control System for the Fertigation Machine
2.2. Asynchronous Motor Mathematical Model
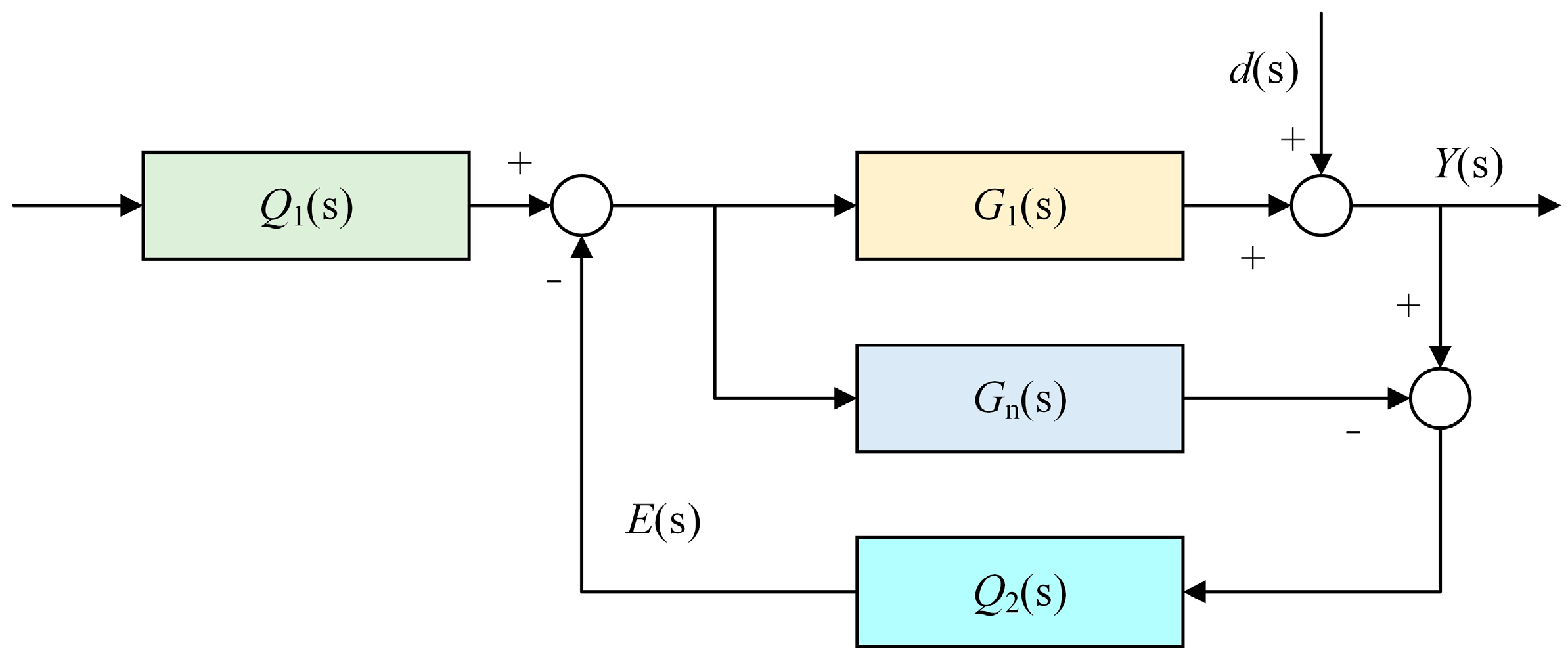
2.3. Internal Model Controller Design
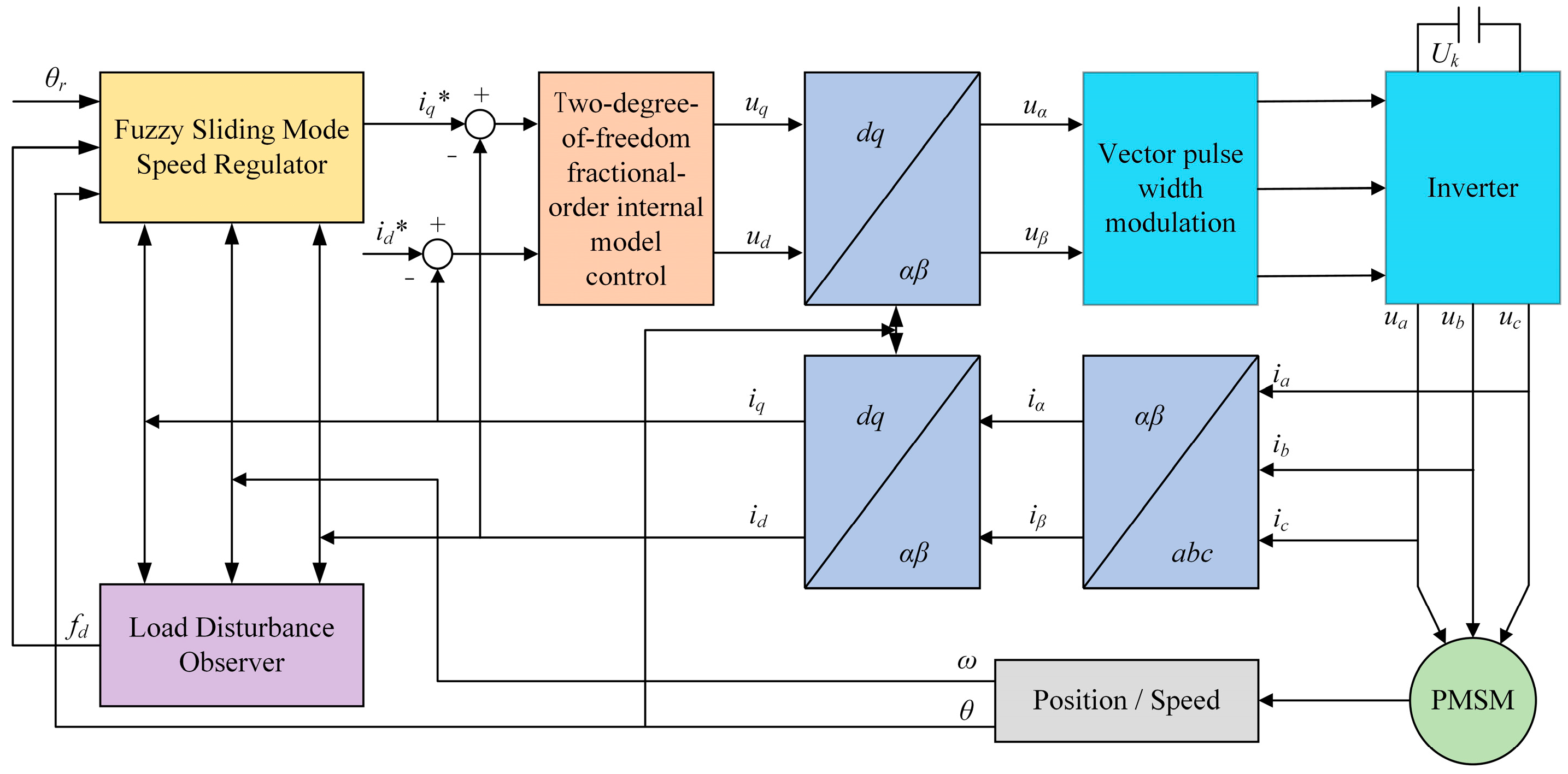
2.4. Fuzzy Sliding Mode Speed Regulator Design
2.5. Fast Terminal Sliding Mode Control Method Based on Asynchronous Motor Disturbance Observer
2.5.1. Load Disturbance Observer Design
2.5.2. Fuzzy Sliding Mode Speed Controller Design
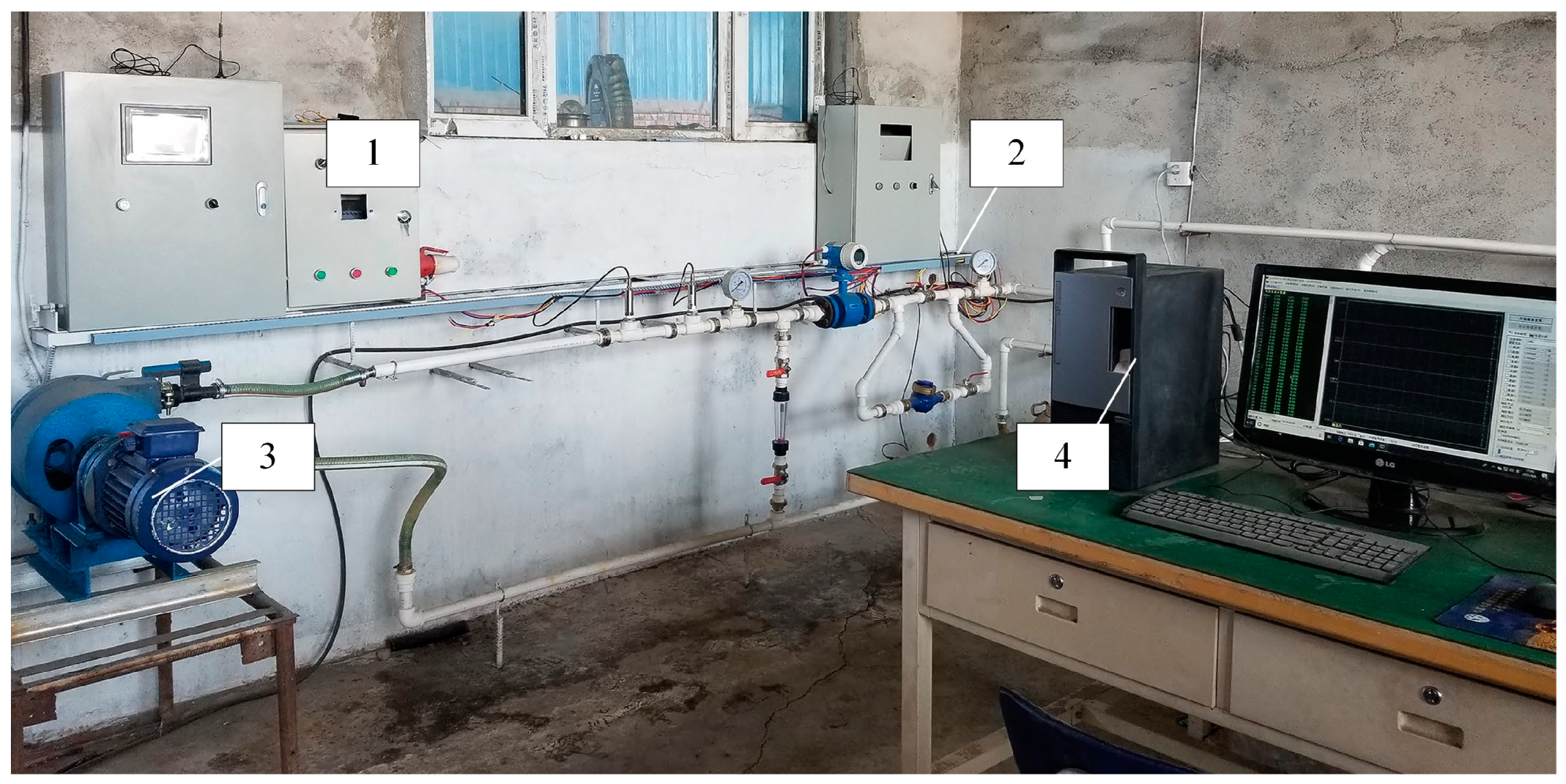
2.6. Test Platform
3. Results and Discussion
3.1. Control Results of the Asynchronous Motor
3.1.1. Motor Speed Control
- During the start-up phase of the asynchronous motor, FTSMC-DO control reaches the set speed faster than PID and SMC controls, with virtually no overshoot.
- Under sudden load conditions, the speed under PID control significantly drops, while the FTSMC-DO control demonstrates enhanced speed regulation capability, maintaining the set speed effectively.
- During acceleration and deceleration, PID and SMC controls show noticeable delays in adjustment time, whereas FTSMC-DO control exhibits rapid and accurate convergence speed.
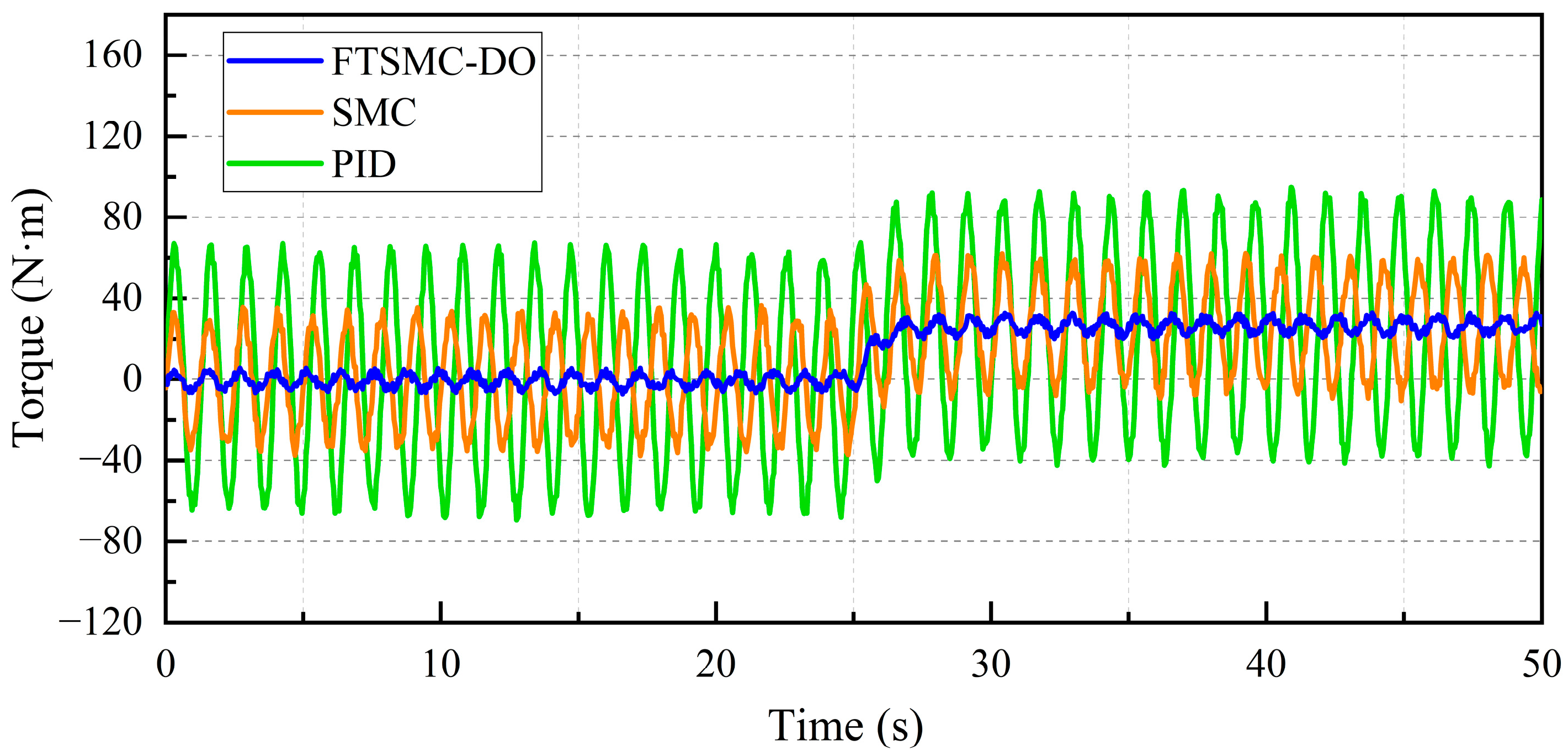
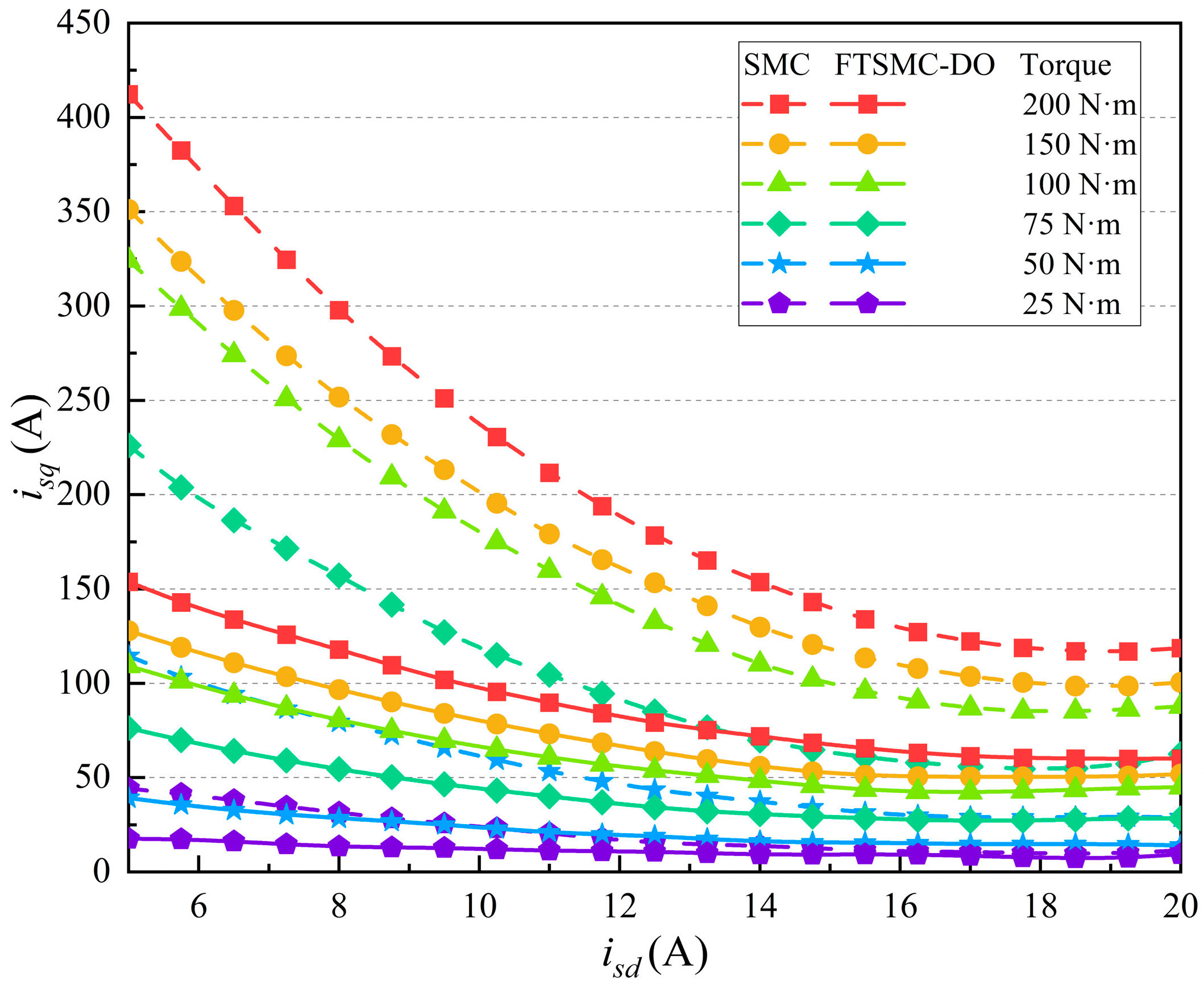
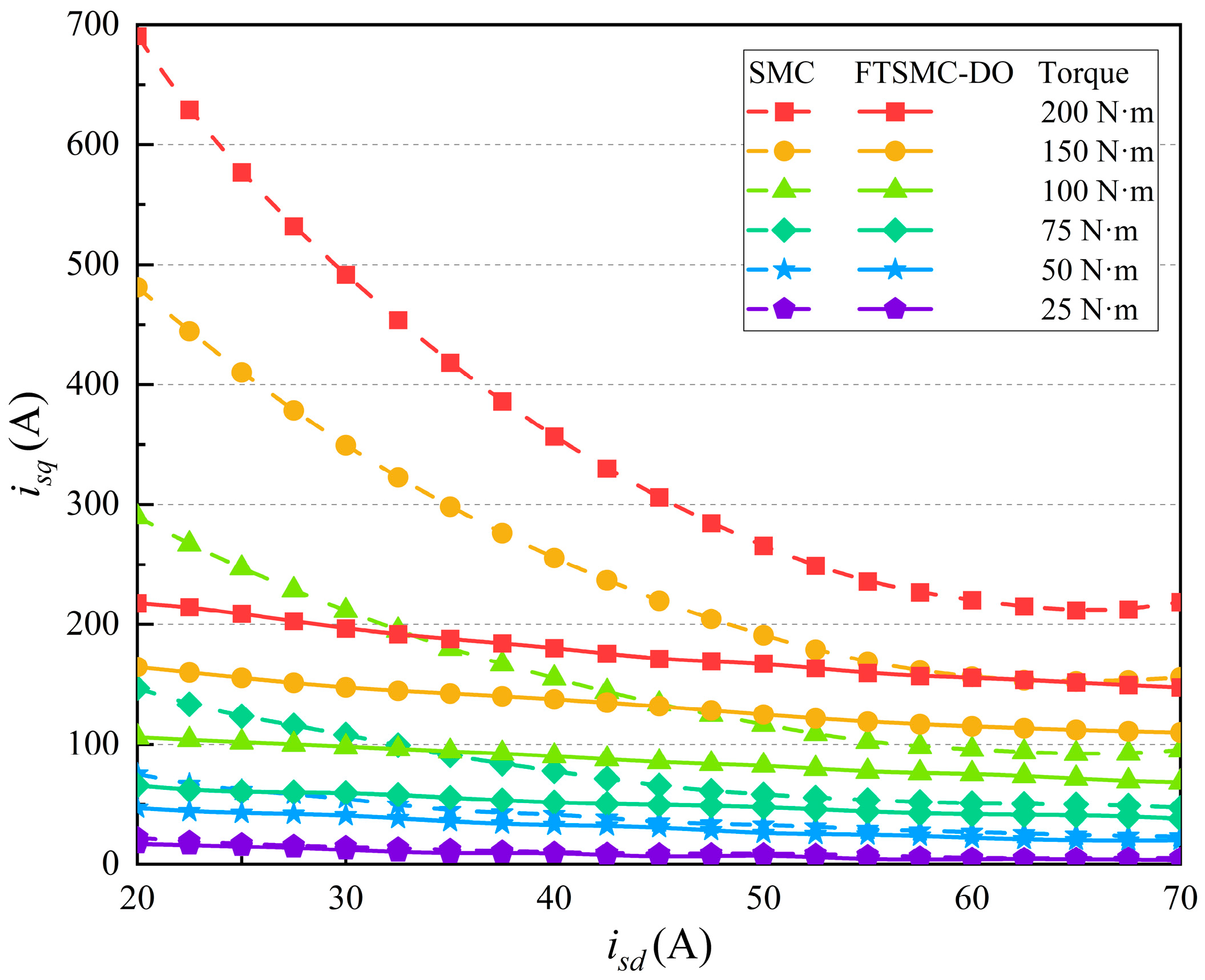
3.1.2. Motor Torque Control
- During steady operation, traditional PID control exhibits significant fluctuations, SMC control still shows noticeable fluctuations, while FTSMC-DO control has substantially less fluctuation.
- At 25 s under sudden load, traditional SMC control takes longer to stabilize and still displays some fluctuation. FTSMC-DO control smoothly transitions and quickly reaches a steady state with minimal fluctuation.
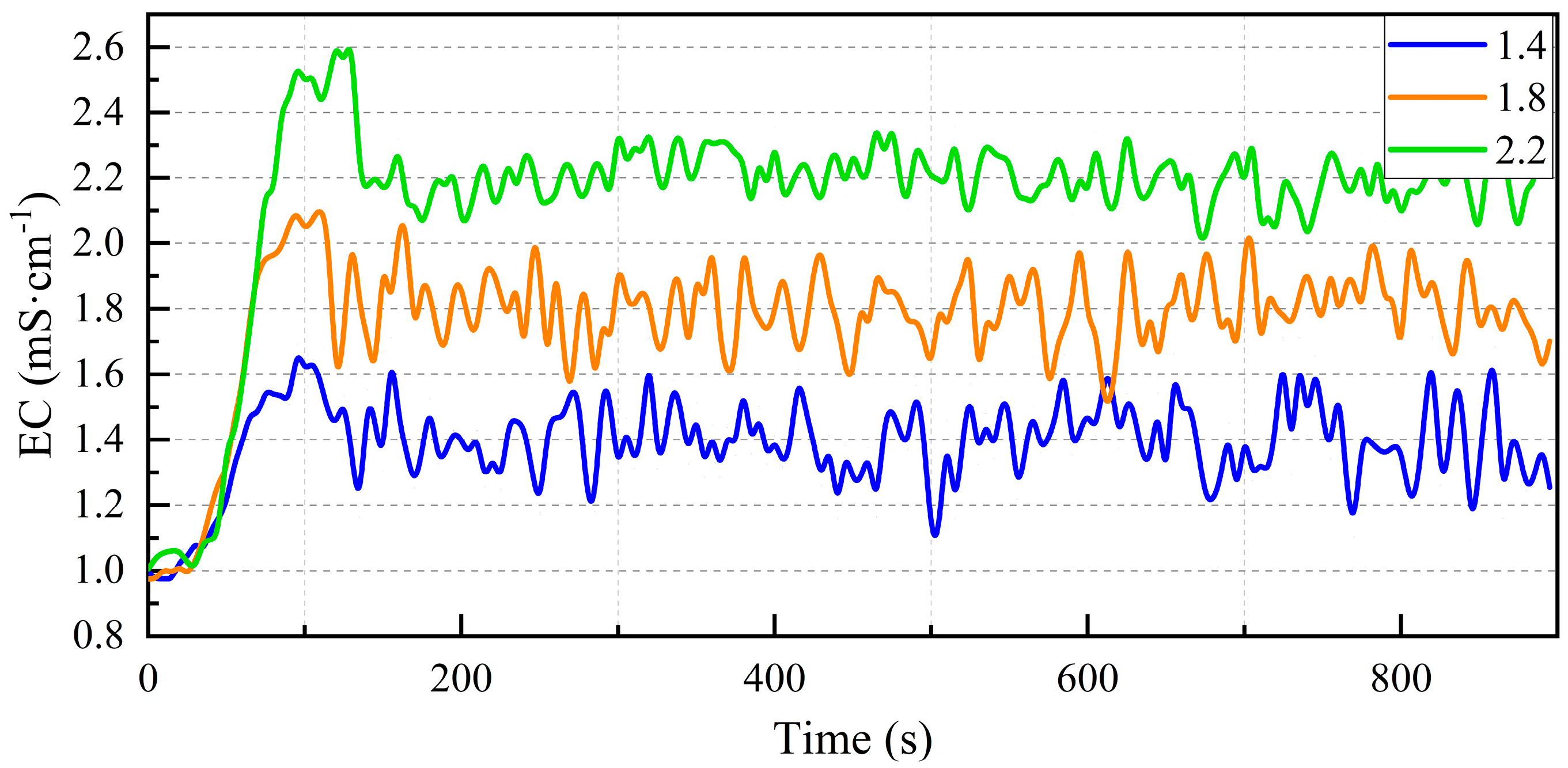
3.2. Experimental Validation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fadiji, A.E.; Yadav, A.N.; Santoyo, G.; Babalola, O.O. Understanding the plant-microbe interactions in environments exposed to abiotic stresses: An overview. Microbiol. Res. 2023, 271, 127368. [Google Scholar] [CrossRef] [PubMed]
- Mainardis, M.; Cecconet, D.; Moretti, A.; Callegari, A.; Goi, D.; Freguia, S.; Capodaglio, A.G. Wastewater fertigation in agriculture: Issues and opportunities for improved water management and circular economy. Environ. Pollut. 2022, 296, 118755. [Google Scholar] [CrossRef] [PubMed]
- Li, H.R.; Mei, X.R.; Wang, J.D.; Huang, F.; Hao, W.P.; Li, B.G. Drip fertigation significantly increased crop yield, water productivity and nitrogen use efficiency with respect to traditional irrigation and fertilization practices: A meta-analysis in China. Agric. Water Manag. 2021, 244, 106534. [Google Scholar] [CrossRef]
- Anas, M.; Liao, F.; Verma, K.K.; Sarwar, M.A.; Mahmood, A.; Chen, Z.L.; Li, Q.; Zeng, X.P.; Liu, Y.; Li, Y.R. Fate of nitrogen in agriculture and environment: Agronomic, eco-physiological and molecular approaches to improve nitrogen use efficiency. Biol. Res. 2020, 53, 47. [Google Scholar] [CrossRef] [PubMed]
- Yue, H.; Meng, F.; An, S.; Hu, X.; Wang, Z.; Niu, M.; Beijing Agric Techn Extension Station (Beij-Non-Standard); Hebei Shuirun Jiahe Modern Agric Technol (HEBE-Non-Standard). Light Intelligent Water and Fertilizer Integrated Machine Fertilization Process Based on Machine Learning Includes Establishing Crop Parameter Model, Performing Machine Learning Parameter Control and Establishing Irrigation Decision. Patent CN112731994-A; CN214474676-U, 22 October 2021. [Google Scholar]
- Seokmin; Han, K.D.; Kwon, D.; SEVEN TREE CO LTD. (SEVE-Non-standard), assignee. Unmanned Irrigation and Fertilization System for Automatically Supplying Water and Fertilizer to Soil, Has Control Unit That Con-trols Irrigation Unit and Fertilizer Unit to Perform Irrigation and Fertilizer When Predicted Value of Vegetation Index Is Lower. Patent KR2350450-B1, 25 May 2000. [Google Scholar]
- Darrhal, N.; Houssa, A.A.; Dhassi, K.; Amlal, F.; Ouichou, A.; Mounsif, M.; Drissi, S. Nutrient Status of Forage Corn (Zea mays L.) and Fodder Beet (Beta vulgaris L.) Irrigated with Saline Water. Commun. Soil Sci. Plant Anal. 2022, 53, 2734–2748. [Google Scholar] [CrossRef]
- Colque, R.; Romaniuk, R.; Arias, P.; Castiglioni, M. Rotación de cultivos en la producción de tabaco: Efecto sobre algunas propiedades edáficas. Cienc. Del Suelo 2021, 39, 127–143. [Google Scholar]
- Chernykh, A.G.; IOP. Use of centrifugal pumps with canned asynchronous motors in irrigation systems. In Proceedings of the International Conference on Engineering Studies and Cooperation in Global Agricultural Production, Azov Black Sea Engn Inst Zernograd, Zernograd, Russia, 27–28 August 2020. [Google Scholar]
- Yang, Y.; Xiao, C.; Zhang, Y.; Zhang, R.; Ji, L.; Li, P.; Zhangjiakou Acad Agric Sci Hebei Res Ins (Zhan-Non-Standard); Zhangjiakou Sansheng Intelligent Agric (Zhan-Non-Standard), assignee. Intelligent Irrigation and Fertilization Decision System Based on Soil Moisture Content Monitoring, Has Soil Ec Sensor That Monitor Soluble Salt Concentration of Soil, Where Soil Nitrogen-Phosphorus-Potassium Sensor Monitors Nitro-gen-Phosphorus-Potassium Content of the Soil. Patent CN117016358-A, 10 November 2023. [Google Scholar]
- Niedda, M.; Pirastru, M. Field investigation and modelling of coupled stream discharge and shallow water-table dynamics in a small Mediterranean catchment (Sardinia). Hydrol. Process. 2014, 28, 5423–5435. [Google Scholar] [CrossRef]
- Wu, H.; Gao, F.; Niu, M.; Li, J.; Xue, G.; Gu, C.; Wu, H.; Modern Agric Equip Co Ltd. (Mode-Non-Standard); Chinese Acad Agric Mechanization Sci (Chnm-C), assignee. Method for Adjusting Ec-Ph Balance of Fertilizing Machine in Water-Saving Irrigation Field, Involves Injecting Mother Liquid According to Acid Liquid Amount or Alkali Liquid Amount and Mixing with Raw Water to Obtain Balanced and Adjusted Fertilizer Water to Output Continuously. Patent CN115500133-A; CN115500133-B, 23 December 2022. [Google Scholar]
- Yang, G.; He, N.; Dalian Lingkong Data Technology Co Ltd. (DALI-Non-standard); SUZHOU DATATELLIT INFORMATION TECHNOLOGY (SUZH-Non-standard), assignee. Ph-Ec Sensor for Use in Water Culture System for Monitoring Ph Value and Ec Value of Water Quality of Plant, Water Storage Part Set in Shell, Measuring Part, Cleaning Part and Drying Part, and Control Part for Controlling Matching Action of Them Sequentially. Patent CN116087292-A, 9 May 2023. [Google Scholar]
- Mabitazan, M.B.; Mabitazan, R.C.; Univ Saint Louis Inc. (UYSL-Non-standard), assignee. Automated Closed Hydroponic System for Monitoring Ph and Electrical Conductivity (Ec) of Nutrient Solution for Plant Cultivation, Has Nutrient Uptake Analysis Conducted to Determine Plant Nutritional Status to Make Sure That Plants Are Taking up Nutrient Balance They Require. Patent PH12021050463-A1, 17 January 2020. [Google Scholar]
- Wang, H.; Zhang, L.X.; Zhao, J.W.; Hu, X.; Ma, X. Application of Hyperspectral Technology Combined with Genetic Algorithm to Optimize Convolution Long- and Short-Memory Hybrid Neural Network Model in Soil Moisture and Organic Matter. Appl. Sci. 2022, 12, 10333. [Google Scholar] [CrossRef]
- Zhang, L.; Zhou, R.; Fan, J.; Univ Shihezi (Ushz-C), assignee. Cotton Field Drip Irrigation Water Fertilizer Electrical Conductivity (Ec) Value Adjusting and Fertilizing Control System, Has Ec Sensor That Is Installed on Outer Pipeline of Mixing Tank for Measuring Ec Value Mass Concentration, and Control Cabinet Power Switch That Is In-stalled in Control Cabinet. Patent CN113366957-A, 10 September 2021. [Google Scholar]
- Zhang, W.; Li, L.; Hu, J.; Kexin Tianjin Ecological Agric Technolog (KEXI-Non-standard), assignee. System for Controlling Water Fertilizer Machine, Has Fertilizer Proportioning Module for Proportioning Mul-tiple Fertilizers, and Irrigation Plan Module for Selecting Irrigation Mode and Irrigation Type According to Partition. Patent CN115525083-A, 29 September 2022. [Google Scholar]
- Ahmad, I.; Yan, Z.A.; Kamran, M.; Ikram, K.; Ghani, M.U.; Hou, F.J. Nitrogen management and supplemental irrigation affected greenhouse gas emissions, yield and nutritional quality of fodder maize in an arid region. Agric. Water Manag. 2022, 269, 107650. [Google Scholar] [CrossRef]
- Zhu, F.L.; Zhang, L.X.; Hu, X.; Zhao, J.W.; Meng, Z.H.; Zheng, Y. Research and Design of Hybrid Optimized Backpropagation (BP) Neural Network PID Algorithm for Integrated Water and Fertilizer Precision Fertilization Control System for Field Crops. Agronomy 2023, 13, 1423. [Google Scholar] [CrossRef]
- Ali, K.; Cao, Z.W.; Rsetam, K.; Man, Z.H. Practical Adaptive Fast Terminal Sliding Mode Control for Servo Motors. Actuators 2023, 12, 433. [Google Scholar] [CrossRef]
- Maraveas, C.; Karavas, C.S.; Loukatos, D.; Bartzanas, T.; Arvanitis, K.G.; Symeonaki, E. Agricultural Greenhouses: Resource Management Technologies and Perspectives for Zero Greenhouse Gas Emissions. Agriculture 2023, 13, 1464. [Google Scholar] [CrossRef]
- Glaser, D.R.; Barrowes, B.E.; Shubitidze, F.; Slater, L.D. Laboratory investigation of high-frequency electromagnetic induction measurements for macro-scale relaxation signatures. Geophys. J. Int. 2023, 235, 1274–1291. [Google Scholar] [CrossRef]
- Kataria, N.; Singh, N. Role of Potassium on Growth, Nitrogen Fixation and Biochemical Traits in Vigna radiata Wilczek under Water Stress. Legume Res. 2022, 45, 719–726. [Google Scholar] [CrossRef]
- Song, X.H.; Li, H.; Chen, C.; Xia, H.M.; Zhang, Z.Y.; Tang, P. Design and Experimental Testing of a Control System for a Solid-Fertilizer-Dissolving Device Based on Fuzzy PID. Agriculture 2022, 12, 1382. [Google Scholar] [CrossRef]
- Zhang, Z.Y.; Chen, C.; Li, H.; Xia, H.M. Design and Evaluation of A Control System for The Fertigation Device. J. Asabe 2022, 65, 1293–1302. [Google Scholar] [CrossRef]
- Jia, Z.F.; Zhuang, P.D. IntelligentWater and Fertilizer System Based on NB-IoT. In Proceedings of the 10th International Conference on Communications, Signal Processing, and Systems, Electr Network, Chang Bai Shan, China, 21–22 August 2021; pp. 533–540. [Google Scholar]
- Gao, P.C.; Yang, P.H. Research on Speed Control of Three-Phase Alternating Current Asynchronous Motor Based on Back Propagation Neural Network Tuning Proportion Integration Differentiation Control. J. Nanoelectron. Optoelectron. 2022, 17, 958–966. [Google Scholar] [CrossRef]
- Novotnak, J.; Oravec, M.; Hijj, J.; Jurc, D.; IEEE. Slip Control by Identifying the Magnetic Field of the Elements of an Asynchronous Motor. In Proceedings of the 19th IEEE World Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl’any, Slovakia, 21–23 January 2021; pp. 273–277. [Google Scholar]
- Rybak, T.Y.; Solovyev, D.S.; Popov, E.A.; Tyagovye Komponenty Llc. (Tyag-Non-Standard); Russian Electric Motors Stock Co. (RUEL-Non-standard), assignee. Rotor for an Asynchronous Traction Motor, Com-Prises a Winding of Short-Circuited Single-Turn Coils of Copper Tape That Includes a Core with Ventilation Channels, and the Shaft of Landing Cones for Installing Small Gear Wheels. Patent RU203517-U1, 30 December 2020. [Google Scholar]
- Wentao, S.; Kun, L. SMC-FUZZY Joint Vector Control of Built-in Permanent Magnet Synchronous Motorized Spindle. J. Mech. Eng. 2022, 58, 177–185. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NS | ZO | PS | PB | |
|---|---|---|---|---|---|
| NB | ZO | NS | NS | NS | NB |
| NS | PS | ZO | NS | ZO | NS |
| ZO | PS | PS | ZO | ZO | NS |
| PS | PB | PS | PS | PS | ZO |
| PB | PB | PS | PS | PS | PS |
| Control Method | Target EC (mS·cm−1) | Steady State EC (mS·cm−1) | Fluctuation Range (mS·cm−1) | Steady State Time (s) | Overshoot (%) |
|---|---|---|---|---|---|
| PID | 1.4 | 1.25~1.56 | 0.42 | 155 | 19.2 |
| 1.8 | 1.65~1.93 | 0.38 | 175 | 21.7 | |
| 2.2 | 2.10~2.30 | 0.29 | 190 | 24.9 | |
| SMC | 1.4 | 1.30~1.50 | 0.31 | 115 | 15.4 |
| 1.8 | 1.67~1.90 | 0.28 | 120 | 16.3 | |
| 2.2 | 2.12~2.28 | 0.20 | 135 | 17.1 | |
| FTSMC-DO | 1.4 | 1.18~1.60 | 0.20 | 95 | 14.5 |
| 1.8 | 1.60~1.98 | 0.18 | 100 | 15.7 | |
| 2.2 | 2.06~2.35 | 0.16 | 120 | 16.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhao, J.; Zhang, L.; Yu, S. Application of Disturbance Observer-Based Fast Terminal Sliding Mode Control for Asynchronous Motors in Remote Electrical Conductivity Control of Fertigation Systems. Agriculture 2024, 14, 168. https://doi.org/10.3390/agriculture14020168
Wang H, Zhao J, Zhang L, Yu S. Application of Disturbance Observer-Based Fast Terminal Sliding Mode Control for Asynchronous Motors in Remote Electrical Conductivity Control of Fertigation Systems. Agriculture. 2024; 14(2):168. https://doi.org/10.3390/agriculture14020168
Chicago/Turabian StyleWang, Huan, Jiawei Zhao, Lixin Zhang, and Siyao Yu. 2024. "Application of Disturbance Observer-Based Fast Terminal Sliding Mode Control for Asynchronous Motors in Remote Electrical Conductivity Control of Fertigation Systems" Agriculture 14, no. 2: 168. https://doi.org/10.3390/agriculture14020168
APA StyleWang, H., Zhao, J., Zhang, L., & Yu, S. (2024). Application of Disturbance Observer-Based Fast Terminal Sliding Mode Control for Asynchronous Motors in Remote Electrical Conductivity Control of Fertigation Systems. Agriculture, 14(2), 168. https://doi.org/10.3390/agriculture14020168