
Model for Detecting Boom Height Based on an Ultrasonic Sensor for the Whole Growth Cycle of Wheat


 , ,
, , 
Abstract
:1. Introduction
2. Materials and Methods
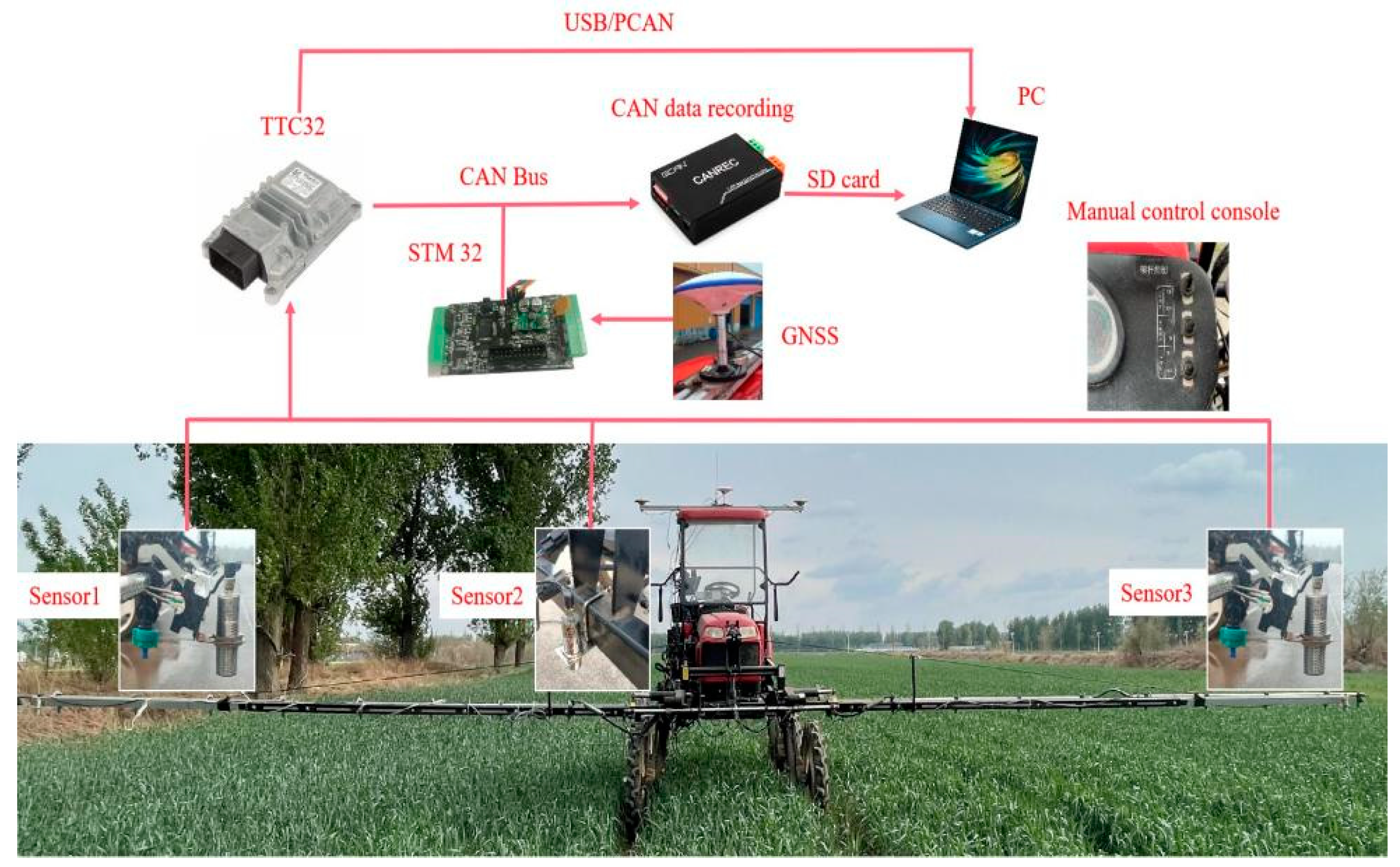
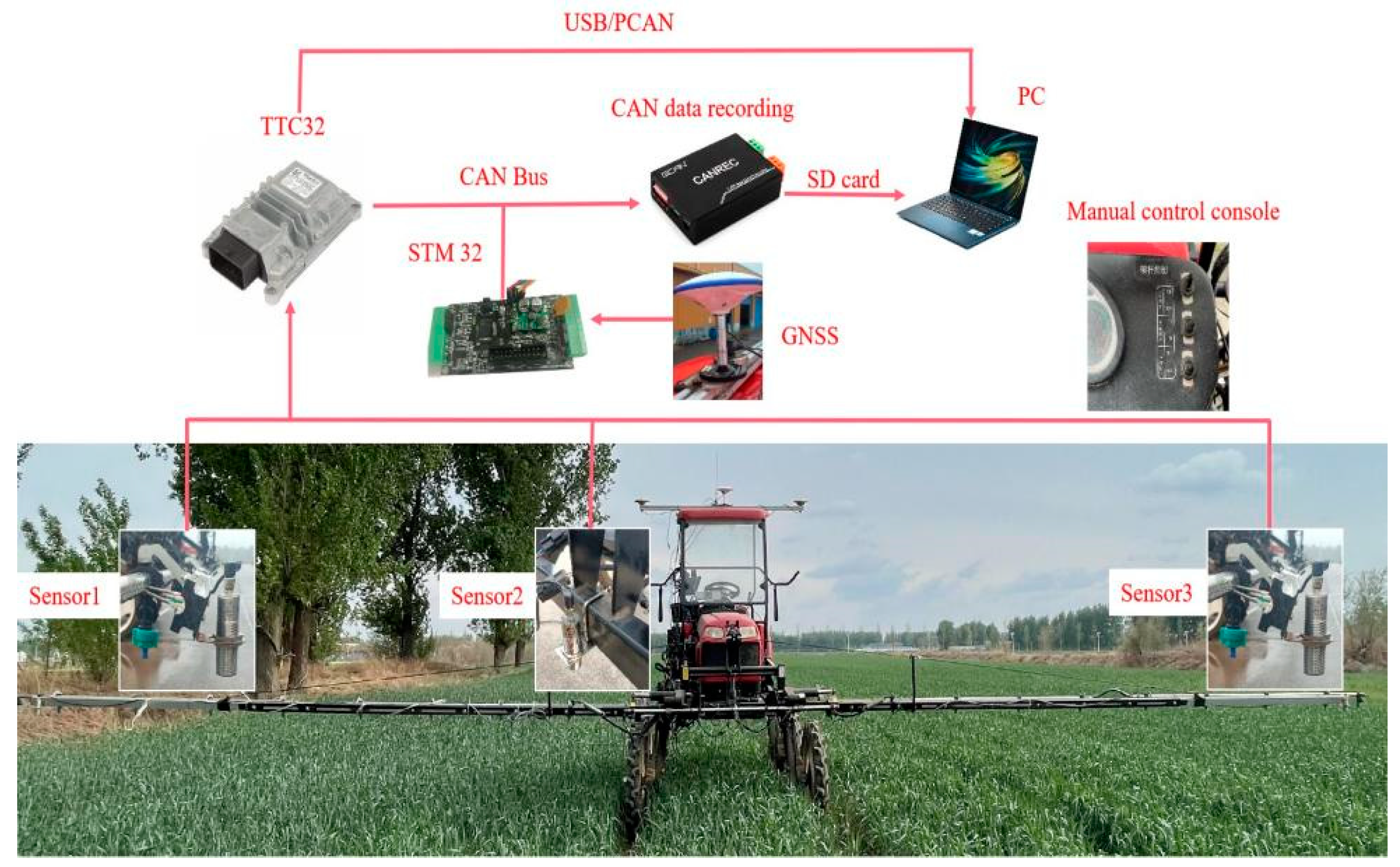
2.1. Design of Boom Height Detection System and Construction of Test Bench
2.1.1. Design of Boom Height Detection System
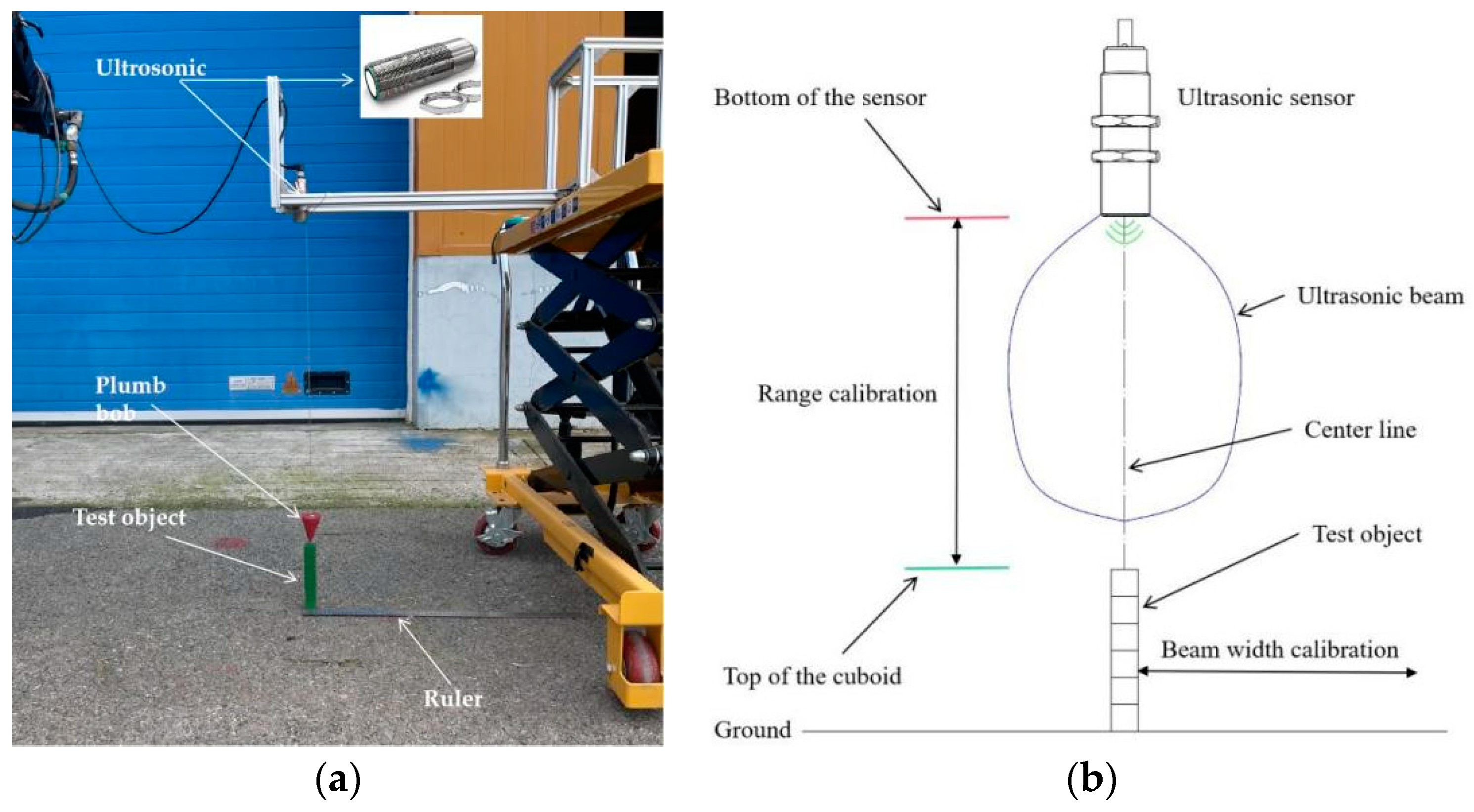
2.1.2. Construction of Ultrasonic Sensor Calibration Test Bench
2.2. Ultrasonic Sensor Calibration Test
2.2.1. Initial Detection Curve Calibration Test and Data Acquisition
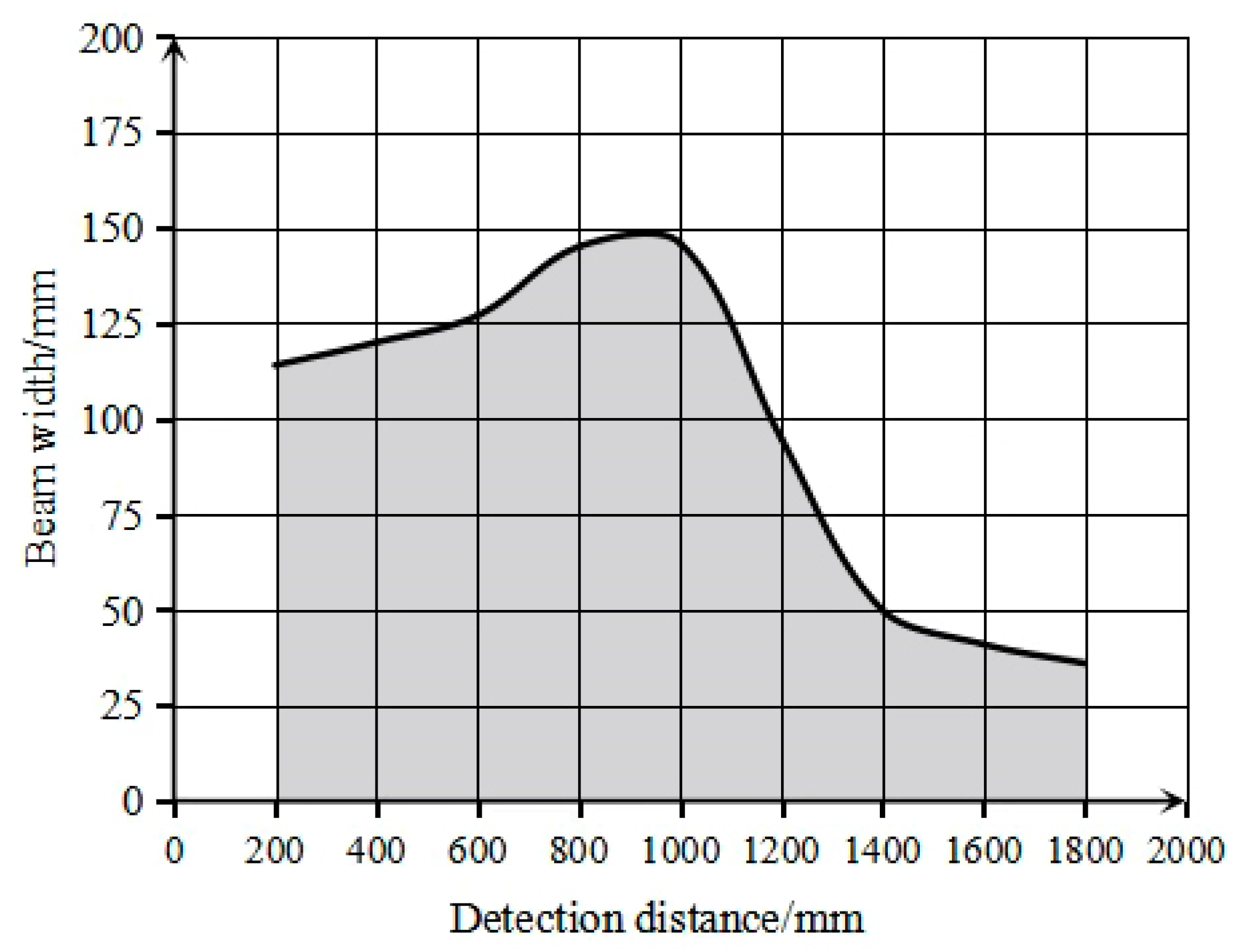
2.2.2. Beam Width Calibration Test and Data Acquisition
2.3. Field Detection Test and Detection Model Establishment of Wheat Whole Growth Cycle
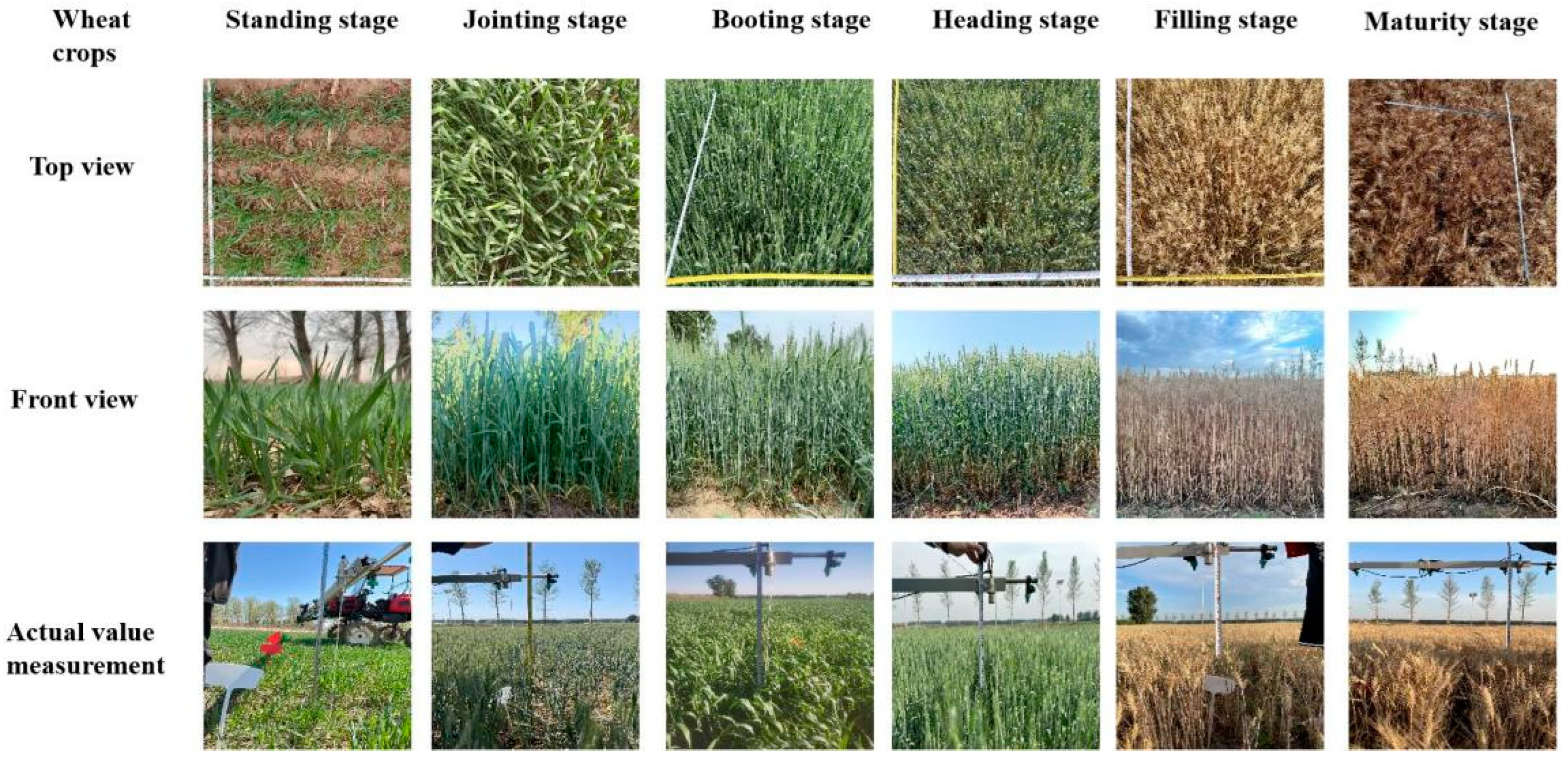
2.3.1. Field Detection Test and Data Collection of Wheat Whole Growth Cycle
2.3.2. Establishment Method of Wheat Whole Growth Cycle Detection Model
3. Results
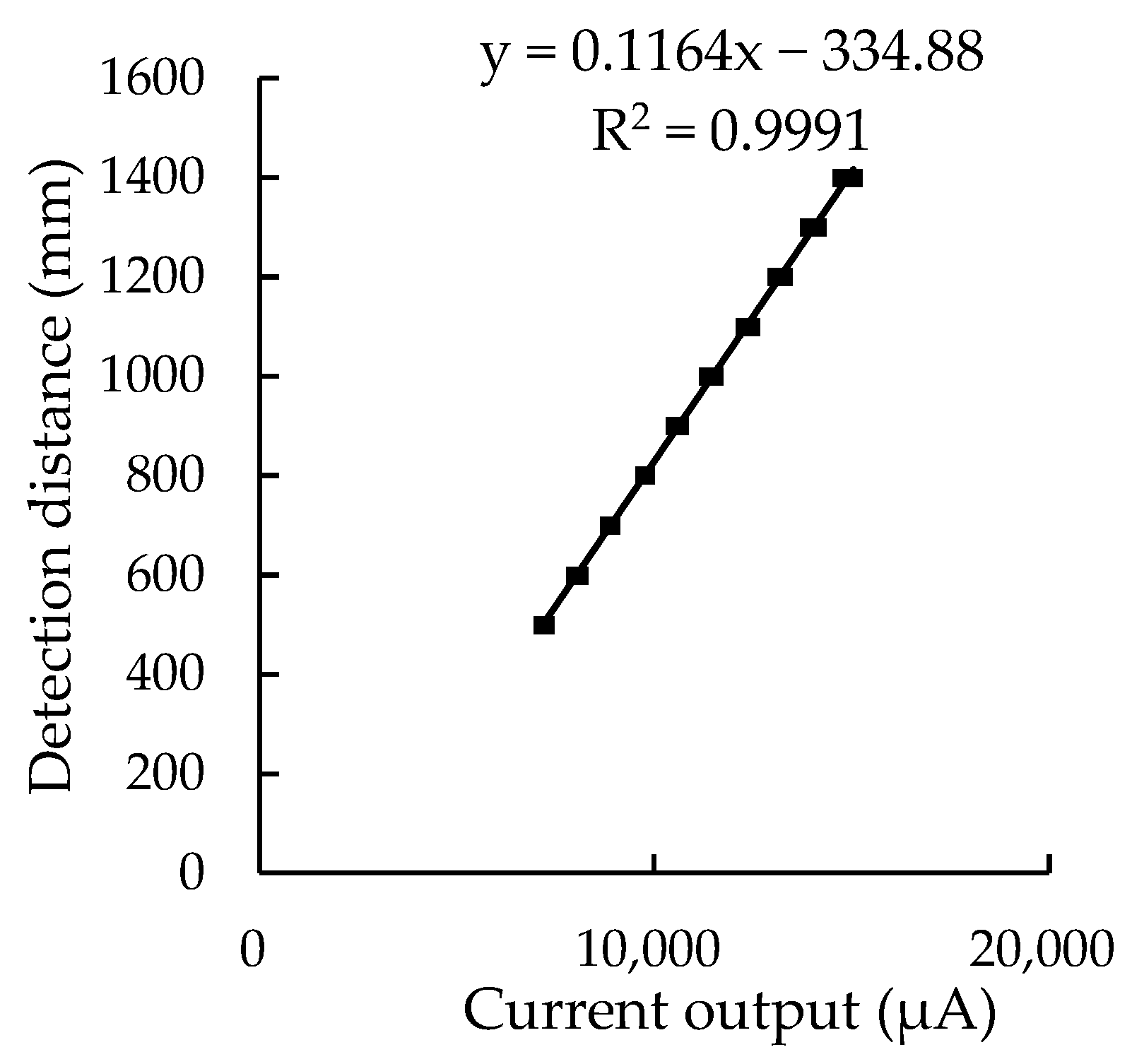
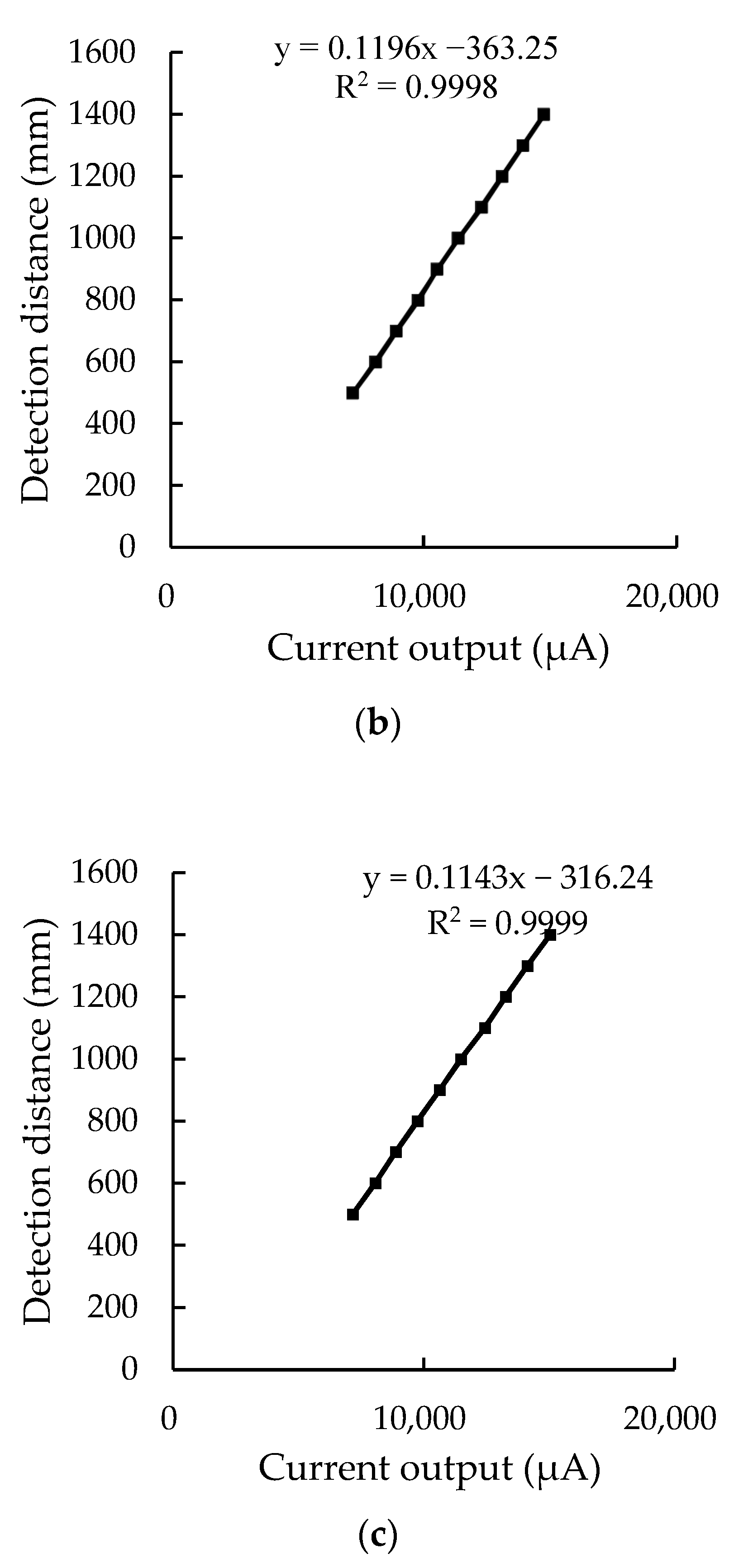
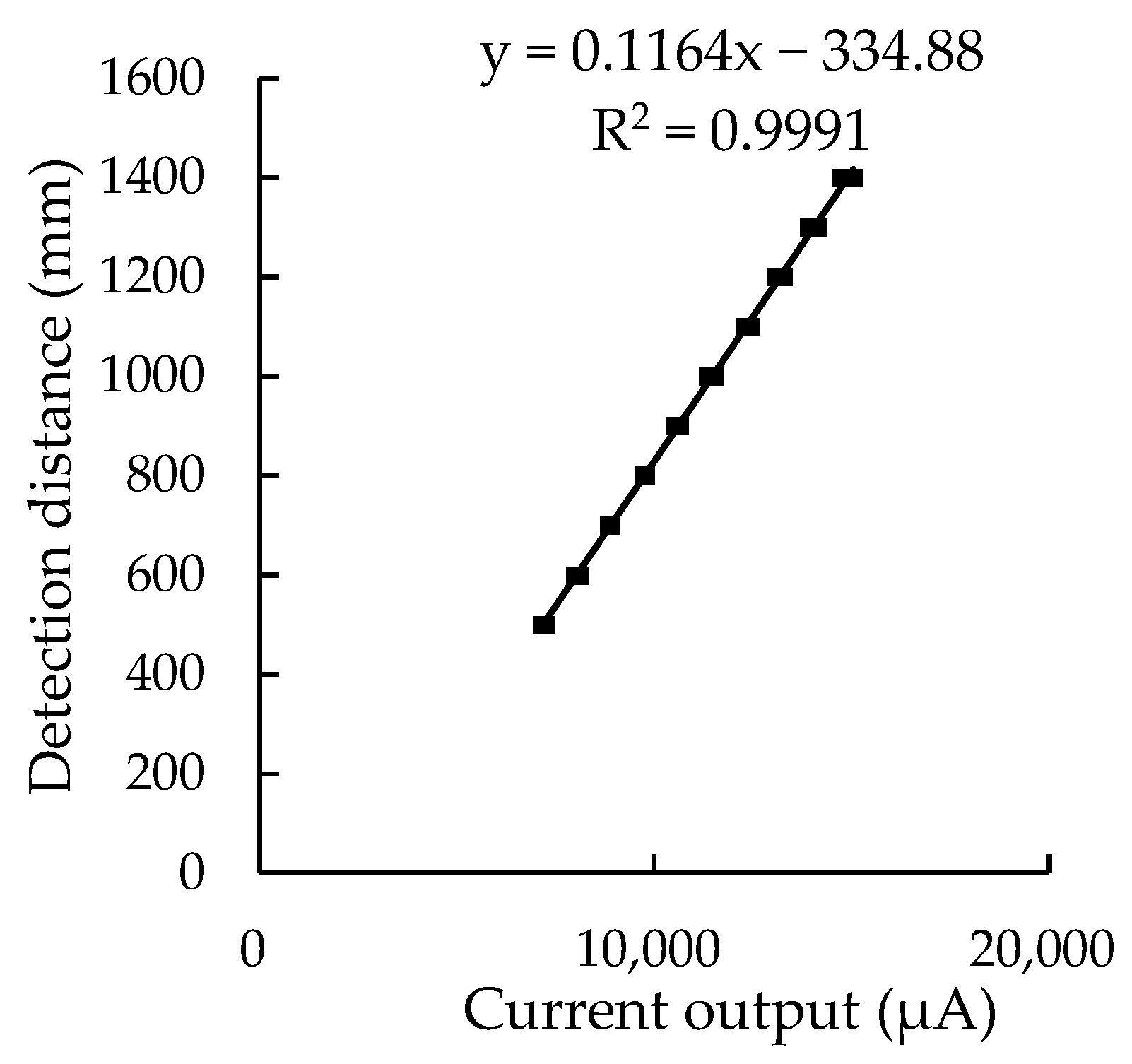
3.1. Initial Detection Curve and Beam width Calibration Test Results of the Ultrasonic Sensor
3.2. Results of the Field Spray Boom Height Detection Test
3.2.1. Construction of the Detection Model
3.2.2. Validation and Optimization Results of the Spray Boom Height Detection Model
4. Discussion
4.1. The Distance between the Ultrasonic Sensor and the Top of the Wheat Canopy within a Certain Range Can Guarantee the Detection Accuracy
4.2. Effects of Different Wheat Growth Stages on the Detection of the Location of Wheat in the Field by the Ultrasonic Sensor
5. Conclusions
- (1)
- The ultrasonic sensor detects the top of the wheat canopy, and its detection position is actually under the top of the canopy. If Hdbw is directly used as the control input of the spraying operation, it leads to a large detection position offset, and the offset of Hdbw can reach 191 mm when Dd is in the range of 450~1000 mm. Under the influence of environmental wind, ultrasonic detection of crops cannot guarantee the vertical relationship, resulting in fluctuations in the detection value, which may affect the detection results. In future work, the influence of field environmental wind on the detection of ultrasonic sensors is a direction to be considered.
- (2)
- When the Dd of the ultrasonic sensor is within 450~1000 mm, the larger the Dd is, the closer the detection position is to the root of the wheat, and vice versa; the smaller the Dd is, the closer the detection position is to the top of the wheat. When the detection distance was more than 1000 mm, the detection value fluctuated violently and the position offset reached a maximum of 511 mm. Therefore, when the detection distance is greater than 1000 mm, it is not suitable for the height detection of wheat.
- (3)
- Different growth stages of wheat also affect detection by the ultrasonic sensor. During the standing stage, the Dd range had a higher Upp only in the range of 450~701 mm (Upp ≥ 85%), which means that only when Dd is in this range can the detection position corresponding to Hdbw be close to the top of the wheat. However, as the wheat growth cycle extends, Hdbw can also have a higher Upp in the larger Dd range of 450~850 mm. Even at the maturity stages, Upp corresponding to Dd in the range of 450~850 mm was both ≥90%.
- (4)
- This study obtained detection compensation values considering different wheat growth stages and different detection heights. Based on the compensation values, a wheat full-range detection model was established, the model was validated and optimized, the applicable range Dd of the model was determined to be 450~950 mm, and the error of the optimized model was <50 mm. The detection model established in this paper, which was designed according to the differences in the growth stages of crops with the aim of building a data model targeted to adjust the sensor application, is expected to improve the reliability and accuracy of the sensor in the agricultural machinery control system.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, X.W.; Liao, J.; Hu, L.; Zhou, Z.Y.; Zhang, Z.G.; Zang, Y.; Wang, P.; He, J. Research Progress of Intelligent Agricultural Machinery in China and Practice of Unmanned Farming Fields. South China Agric. Univ. J. 2021, 42, 8–17+5. [Google Scholar] [CrossRef]
- Li, D.L.; Li, Z. Analysis and Development Prospects of Unmanned Farming Systems. J. Agric. Mach. 2020, 51, 1–12. [Google Scholar] [CrossRef]
- Zhao, C.J. Current Development and Future Prospects of Smart Agriculture. South China Agric. Univ. J. 2021, 42, 1–7. [Google Scholar] [CrossRef]
- Speelman, L.; Jansen, J.W. The effect of spray-boom movement on the liquid distribution of field crop sprayers. J. Agric. Eng. Res. 1974, 19, 117–129. [Google Scholar] [CrossRef]
- Ramon, H.; De Baerdemaeker, J. Spray boom motions and spray distribution: Part 1, derivation of a mathematical relation. J. Agric. Eng. Res. 1997, 66, 23–29. [Google Scholar] [CrossRef]
- Griffith, J.; Strelioff, B.; Schnaider, J. The Hockley Index. ASABE Annu. Int. Meet. 2012, 2012, 1325–1332. [Google Scholar] [CrossRef]
- Holterman, H.J.; van de Zande, J.C.; Porskamp, H.A.; Huijsmans, J.F. Modelling spray drift from boom sprayers. Comput. Electron. Agric. 1997, 19, 1–22. [Google Scholar] [CrossRef]
- Nuyttens, D.; De Schampheleire, M.; Baetens, K.; Sonck, B. The influence of operator-controlled variables on spray drift from field crop sprayers. Trans. ASABE 2007, 50, 1129–1140. [Google Scholar] [CrossRef]
- Baetens, K.; Ho, Q.T.; Nuyttens, D.; De Schampheleire, M.; Endalew, A.M.; Hertog, M.L.; Nicolaï, B.; Ramon, H.; Verboven, P. A validated 2-D diffusion-advection model for prediction of drift from ground boom sprayers. Atmos. Environ. 2009, 43, 1674–1682. [Google Scholar] [CrossRef]
- Tumbo, S.D.; Salyani, M.; Whitney, J.D.; Wheaton, T.A.; Miller, W.M. Investigation of laser and ultrasonic ranging sensors for measurements of citrus canopy volume. Appl. Eng. Agric. 2002, 18, 367–372. [Google Scholar] [CrossRef]
- Ehlert, D.; Adamek, R.; Horn, H.J. Laser rangefinder-based measuring of crop biomass under field conditions. Precis. Agric. 2009, 10, 395–408. [Google Scholar] [CrossRef]
- Dou, H.J.; Wang, S.L.; Zhai, C.Y.; Chen, L.P.; Wang, X.; Zhao, X.G. A 1idar sensor based spray boom height detection method and the corresponding experimenta1 va1idation. Sensors 2021, 21, 2107. [Google Scholar] [CrossRef] [PubMed]
- Jimenez-Berni, J.A.; Deery, D.M.; Rozas-Larraondo, P.; Condon, A.G.; Rebetzke, G.J.; James, R.A.; Bovill, W.D.; Furbank, R.T.; Sirault, X.R.R. High throughput determination of plant height, ground cover, and above-ground biomass in wheat with LiDAR. Front. Plant Sci. 2018, 9, 237. [Google Scholar] [CrossRef] [PubMed]
- Llorens, J.; Gil, E.; Llop, J.; Escolà, A. Ultrasonic and LIDAR Sensors for Electronic Canopy Characterization in Vineyards: Advances to Improve Pesticide Application Methods. Sensors 2011, 11, 2177–2194. [Google Scholar] [CrossRef] [PubMed]
- Cui, L.F.; Xue, X.Y.; Ding, S.M.; Le, F.X. Development of a DSP-based electronic control system for the active spray boom suspension. Comput. Electron. Agric. 2019, 166, 105024. [Google Scholar] [CrossRef]
- Sinfort, C.; Miralles, A.; Sevila, F.; Maniere, G.M. Study and development of a test method for spray boom suspensions. J. Agric. Eng. Res. 1994, 59, 245–252. [Google Scholar] [CrossRef]
- Wang, S.L.; Zhao, C.J.; Wang, X. Design and test of boom height adjustment system. J. Agric Mech. Res. 2014, 36, 161–164+173. [Google Scholar] [CrossRef]
- Pittman, J.J.; Arnall, D.B.; Interrante, S.M.; Moffet, C.A.; Butler, T.J. Estimation of biomass and canopy height in bermudagrass, alfalfa, and wheat using ultrasonic, laser, and spectral sensors. Sensors 2015, 15, 2920–2943. [Google Scholar] [CrossRef]
- Barmeier, G.; Mistele, B.; Schmidhalter, U. Referencing laser and ultrasonic height measurements of barleycultivars by using a herbometre as standard. Crop Pasture Sci. 2016, 67, 1215–1222. [Google Scholar] [CrossRef]
- Chang, Y.K.; Zaman, Q.U.; Rehman, T.U.; Farooque, A.A.; Esau, T.; Jameel, M.W. A real-time ultrasonic system to measure wild blueberry plant height during harvesting. Biosyst. Eng. 2017, 157, 35–44. [Google Scholar] [CrossRef]
- Bronson, K.F.; French, A.N.; Conley, M.M.; Barnes, E.M. Use of an ultrasonic sensor for plant height estimation in irrigated cotton. Agron. J. 2021, 113, 2175–2183. [Google Scholar] [CrossRef]
- Farooque, A.A.; Chang, Y.K.; Zaman, Q.U.; Groulx, D.; Schumann, A.W.; Esau, T.J. Performance evaluation of multiple ground based sensors mounted on a commercial wild blueberry harvester to sense plant height, fruit yield and topographic features in real-time. Comput. Electron. Agric. 2013, 91, 135–144. [Google Scholar] [CrossRef]
- Schumann, A.W.; Zaman, Q.U. Software Development for Real-Time Ultrasonic Mapping of Tree Canopy Size. Comput. Electron. Agric. 2005, 47, 25–40. [Google Scholar] [CrossRef]
- Escolà, A.; Planas, S.; Rosell, J.R.; Pomar, J.; Camp, F.; Solanelles, F.; Gràcia, F.; Llorens, J.; Gil, E. Performance of an ultrasonic ranging sensor in apple tree canopies. Sensors 2011, 11, 2459–2477. [Google Scholar] [CrossRef] [PubMed]
- Zaman, Q.U.; Salyani, M.; Zaman, Q.U.; Salyani, M. Effects of foliage density and ground speed on ultrasonic measurement of citrus tree volume. Appl. Eng. Agric. 2004, 20, 173–178. [Google Scholar] [CrossRef]
- Aziz, S.A.; Steward, B.L.; Birrell, S.J.; Kaspar, T.C.; Shrestha, D.S. Ultrasonic sensing for corn plant canopy characterization. In Proceedings of the ASAE Annual International Meeting, Cobo Center in, Detroit, Detroit, MI, USA, 8–11 July 2024. [Google Scholar] [CrossRef]
- Li, H.Z.; Zhai, C.Y.; Weckler, P.; Wang, N.; Yang, S.; Zhang, B. A Canopy Density Model for Planar Orchard Target Detection Based on Ultrasonic Sensors. Sensors 2017, 17, 31. [Google Scholar] [CrossRef] [PubMed]
- Nan, Y.L.; Zhang, H.C.; Zheng, J.Q.; Bian, L.M.; Li, Y.X.; Yang, Y.; Zhang, M.; Ge, Y. Estimating leaf area density of Osmanthus trees using ultrasonic sensing. Biosyst. Eng. 2019, 186, 60–70. [Google Scholar] [CrossRef]
- Gil, E.; Escolà, A.; Rosell, J.R.; Planas, S.; Val, L. Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Prot. 2007, 26, 1287–1297. [Google Scholar] [CrossRef]
- Maghsoudi, H.; Minaei, S.; Ghobadian, B.; Masoudi, H. Ultrasonic sensing of pistachio canopy for low-volume precision spraying. Comput. Electron. Agric. 2015, 112, 149–160. [Google Scholar] [CrossRef]
- Zhou, H.T.; Jia, W.D.; Li, Y.; Ou, M.X. Method for estimating canopy thickness using ultrasonic sensor technology. Agriculture 2021, 11, 1011. [Google Scholar] [CrossRef]
- Andújar, D.; Weis, M.; Gerhards, R. An Ultrasonic System for Weed Detection in Cereal Crops. Sensors 2012, 12, 17343–17357. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Bai, X.H.; Li, Y.K. A crop canopy localization method based on ultrasonic ranging and iterative self-organizing data analysis technique algorithm. Sensors 2020, 20, 818. [Google Scholar] [CrossRef] [PubMed]
- Dou, H.J.; Zhai, C.Y.; Chen, L.P.; Wang, S.L.; Wang, X. Field variation characteristics of sprayer boom height using a newly designed boom height detection system. IEEE Access 2021, 9, 17148–17160. [Google Scholar] [CrossRef]
- Zhao, X.G.; Zhai, C.Y.; Wang, S.L.; Dou, H.J.; Yang, S.; Wang, X.; Chen, L. Sprayer boom height measurement in wheat field using ultrasonic sensor: An exploratory study. Front. Plant Sci. 2022, 13, 1008122. [Google Scholar] [CrossRef]
- Scotford, I.M.; Miller, P.C.H. Combination of Spectral Reflectance and Ultrasonic Sensing to monitor the Growth of Winter Wheat. Biosyst. Eng. 2004, 87, 27–38. [Google Scholar] [CrossRef]
- Wei, J.; Salyani, M. Development of a Laser Scanner for Measuring Tree Canopy Characteristics: Phase 1. Prototype Development. Trans. ASAE 2004, 47, 2101–2107. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Analysis of Variance | F | p-Value |
|---|---|---|---|
| Sensor1 | Between-group variance | 147.09 | 4.25 × 10−10 |
| Sensor2 | Between-group variance | 154.82 | 2.81 × 10−10 |
| Sensor3 | Between-group variance | 144.34 | 4.95 × 10−10 |
| Current Values/μA | Detection Values/mm | Difference/mm | ||||
|---|---|---|---|---|---|---|
| Sensor 1 | Sensor 2 | Sensor 3 | Fusion | Max | Min | |
| 4000 | 135 | 115 | 141 | 131 | 16 | 4 |
| 6000 | 366 | 354 | 370 | 364 | 10 | 2 |
| 8000 | 598 | 594 | 598 | 596 | 2 | 2 |
| 10,000 | 829 | 833 | 827 | 829 | 4 | 0 |
| 12,000 | 1061 | 1042 | 1055 | 1062 | 20 | 1 |
| 14,000 | 1293 | 1311 | 1284 | 1295 | 16 | 2 |
| 16,000 | 1524 | 1550 | 1513 | 1528 | 22 | 4 |
| 18,000 | 1756 | 1790 | 1741 | 1760 | 30 | 4 |
| 20,000 | 1987 | 2029 | 1970 | 1993 | 36 | 6 |
| Stage | Hdbw/mm | Habw/mm | Offset/mm | Hapw/mm | Upp/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S1 | S2 | S3 | S1 | S2 | S3 | S1 | S2 | S3 | S1 | S2 | S3 | |
| P1 | 468 | 471 | 460 | 450 | 460 | 450 | 18 | 11 | 10 | 139 | 120 | 113 | 87.05 | 90.83 | 91.15 |
| 542 | 514 | 530 | 532 | 500 | 523 | 10 | 14 | 7 | 139 | 120 | 113 | 92.81 | 88.33 | 93.81 | |
| 640 | 613 | 595 | 625 | 598 | 580 | 15 | 15 | 17 | 139 | 120 | 113 | 89.21 | 87.5 | 86.73 | |
| 699 | 694 | 631 | 680 | 680 | 615 | 19 | 14 | 16 | 139 | 120 | 113 | 86.33 | 88.33 | 85.84 | |
| 758 | 819 | 715 | 734 | 799 | 701 | 24 | 20 | 14 | 139 | 120 | 113 | 82.73 | 83.33 | 87.61 | |
| 815 | 887 | 818 | 784 | 865 | 796 | 31 | 22 | 22 | 139 | 120 | 113 | 77.7 | 81.67 | 80.53 | |
| 865 | 989 | 980 | 840 | 961 | 947 | 25 | 28 | 33 | 139 | 120 | 113 | 82.01 | 76.67 | 70.8 | |
| 920 | 1110 | 1120 | 891 | 1058 | 1075 | 29 | 52 | 45 | 139 | 120 | 113 | 79.14 | 56.67 | 60.18 | |
| 1121 | 1200 | 1214 | 1008 | 1160 | 1138 | 113 | 40 | 76 | 139 | 120 | 113 | 18.71 | 66.67 | 32.74 | |
| 1231 | 1374 | 1300 | 1135 | 1274 | 1231 | 96 | 100 | 69 | 139 | 120 | 113 | 30.94 | 16.67 | 38.94 | |
| 1331 | 1487 | 1450 | 1220 | 1397 | 1357 | 111 | 90 | 93 | 139 | 120 | 113 | 20.14 | 25 | 17.7 | |
| P2 | 535 | 578 | 450 | 510 | 552 | 445 | 25 | 26 | 5 | 447 | 393 | 442 | 94.41 | 93.38 | 98.87 |
| 567 | 626 | 548 | 540 | 610 | 520 | 27 | 16 | 28 | 447 | 393 | 442 | 93.96 | 95.93 | 93.67 | |
| 648 | 701 | 651 | 620 | 670 | 630 | 28 | 31 | 21 | 447 | 393 | 442 | 93.74 | 92.11 | 95.25 | |
| 686 | 780 | 703 | 664 | 750 | 678 | 22 | 30 | 25 | 447 | 393 | 442 | 95.08 | 92.37 | 94.34 | |
| 837 | 842 | 843 | 798 | 800 | 805 | 39 | 42 | 38 | 447 | 393 | 442 | 91.28 | 89.31 | 91.4 | |
| 944 | 926 | 891 | 871 | 864 | 850 | 73 | 62 | 41 | 447 | 393 | 442 | 83.67 | 84.22 | 90.72 | |
| 967 | 952 | 933 | 895 | 890 | 865 | 72 | 62 | 68 | 447 | 393 | 442 | 83.89 | 84.22 | 84.62 | |
| 995 | 1045 | 1052 | 964 | 971 | 973 | 31 | 74 | 79 | 447 | 393 | 442 | 93.06 | 81.17 | 82.13 | |
| 1142 | 1218 | 1283 | 1007 | 1096 | 1065 | 135 | 122 | 218 | 447 | 393 | 442 | 69.8 | 68.96 | 50.68 | |
| 1265 | 1317 | 1329 | 1089 | 1136 | 1143 | 176 | 181 | 186 | 447 | 393 | 442 | 60.63 | 53.94 | 57.92 | |
| 1376 | 1450 | 1468 | 1179 | 1248 | 1173 | 197 | 202 | 295 | 447 | 393 | 442 | 55.93 | 48.6 | 33.26 | |
| P3 | 540 | 534 | 471 | 515 | 500 | 450 | 25 | 34 | 21 | 515 | 528 | 521 | 95.15 | 93.56 | 95.97 |
| 618 | 594 | 518 | 571 | 545 | 485 | 47 | 49 | 33 | 515 | 528 | 521 | 90.87 | 90.72 | 93.67 | |
| 680 | 638 | 535 | 643 | 600 | 508 | 37 | 38 | 27 | 515 | 528 | 521 | 92.82 | 92.8 | 94.82 | |
| 750 | 750 | 587 | 716 | 700 | 550 | 34 | 50 | 37 | 515 | 528 | 521 | 93.4 | 90.53 | 92.9 | |
| 955 | 788 | 741 | 869 | 764 | 620 | 86 | 24 | 121 | 515 | 528 | 521 | 83.3 | 95.45 | 76.78 | |
| 1011 | 864 | 664 | 927 | 812 | 637 | 84 | 52 | 27 | 515 | 528 | 521 | 83.69 | 90.15 | 94.82 | |
| 1034 | 914 | 762 | 951 | 858 | 715 | 83 | 56 | 47 | 515 | 528 | 521 | 83.88 | 89.39 | 90.98 | |
| 1087 | 1031 | 791 | 991 | 930 | 729 | 96 | 101 | 62 | 515 | 528 | 521 | 81.36 | 80.87 | 88.1 | |
| 1500 | 1081 | 901 | 1100 | 989 | 830 | 400 | 92 | 71 | 515 | 528 | 521 | 22.33 | 82.58 | 86.37 | |
| 1389 | 1320 | 1030 | 1217 | 1158 | 943 | 172 | 162 | 87 | 515 | 528 | 521 | 66.6 | 70.08 | 83.3 | |
| P4 | 480 | 511 | 487 | 450 | 495 | 470 | 30 | 16 | 17 | 526 | 552 | 603 | 94.3 | 97.1 | 97.18 |
| 595 | 543 | 540 | 570 | 520 | 520 | 25 | 23 | 20 | 526 | 552 | 603 | 95.25 | 95.83 | 96.68 | |
| 739 | 680 | 701 | 690 | 630 | 650 | 49 | 50 | 51 | 526 | 552 | 603 | 90.68 | 90.94 | 91.54 | |
| 829 | 781 | 700 | 760 | 710 | 657 | 69 | 71 | 43 | 526 | 552 | 603 | 86.88 | 87.14 | 92.87 | |
| 846 | 800 | 769 | 780 | 760 | 730 | 66 | 40 | 39 | 526 | 552 | 603 | 87.45 | 92.75 | 93.53 | |
| 894 | 897 | 941 | 835 | 820 | 850 | 59 | 77 | 91 | 526 | 552 | 603 | 88.78 | 86.05 | 84.91 | |
| 959 | 948 | 1025 | 870 | 860 | 932 | 89 | 88 | 93 | 526 | 552 | 603 | 83.08 | 84.06 | 84.58 | |
| 973 | 1035 | 1050 | 893 | 934 | 948 | 80 | 101 | 102 | 526 | 552 | 603 | 84.79 | 81.7 | 83.08 | |
| 1041 | 1238 | 1047 | 951 | 1030 | 970 | 90 | 208 | 77 | 526 | 552 | 603 | 82.89 | 62.32 | 87.23 | |
| 1241 | 1358 | 1321 | 1024 | 1062 | 1076 | 217 | 296 | 245 | 526 | 552 | 603 | 58.75 | 46.38 | 59.37 | |
| P5 | 560 | 483 | 486 | 533 | 455 | 450 | 27 | 28 | 36 | 542 | 568 | 622 | 95.02 | 95.07 | 94.21 |
| 608 | 539 | 563 | 560 | 510 | 530 | 48 | 29 | 33 | 542 | 568 | 622 | 91.14 | 94.89 | 94.69 | |
| 780 | 634 | 654 | 720 | 580 | 590 | 60 | 54 | 64 | 542 | 568 | 622 | 88.93 | 90.49 | 89.71 | |
| 894 | 727 | 720 | 818 | 690 | 670 | 76 | 37 | 50 | 542 | 568 | 622 | 85.98 | 93.49 | 91.96 | |
| 899 | 835 | 844 | 846 | 784 | 790 | 53 | 51 | 54 | 542 | 568 | 622 | 90.22 | 91.02 | 91.32 | |
| 1035 | 950 | 865 | 930 | 867 | 840 | 105 | 83 | 25 | 542 | 568 | 622 | 80.63 | 85.39 | 95.98 | |
| 1079 | 991 | 974 | 968 | 895 | 880 | 111 | 96 | 94 | 542 | 568 | 622 | 79.52 | 83.10 | 84.89 | |
| 1472 | 1041 | 1000 | 1025 | 940 | 899 | 447 | 101 | 101 | 542 | 568 | 622 | 17.53 | 82.22 | 83.76 | |
| 1625 | 1143 | 1100 | 1160 | 1000 | 975 | 465 | 143 | 125 | 542 | 568 | 622 | 14.21 | 74.82 | 79.90 | |
| 1700 | 1502 | 1354 | 1189 | 1040 | 1000 | 511 | 462 | 354 | 542 | 568 | 622 | 5.72 | 18.66 | 43.09 | |
| P6 | 612 | 541 | 460 | 580 | 510 | 450 | 32 | 31 | 10 | 638 | 654 | 688 | 94.98 | 95.26 | 98.55 |
| 720 | 637 | 560 | 670 | 600 | 523 | 50 | 37 | 37 | 638 | 654 | 688 | 92.16 | 94.34 | 94.62 | |
| 794 | 730 | 630 | 740 | 723 | 617 | 54 | 7 | 13 | 638 | 654 | 688 | 91.54 | 98.93 | 98.11 | |
| 859 | 804 | 752 | 810 | 760 | 700 | 49 | 44 | 52 | 638 | 654 | 688 | 92.32 | 93.27 | 92.44 | |
| 962 | 823 | 780 | 865 | 790 | 765 | 97 | 33 | 15 | 638 | 654 | 688 | 84.80 | 94.95 | 97.82 | |
| 1000 | 915 | 871 | 890 | 850 | 810 | 110 | 65 | 61 | 638 | 654 | 688 | 82.76 | 90.06 | 91.13 | |
| 1063 | 1030 | 964 | 950 | 930 | 860 | 113 | 100 | 104 | 638 | 654 | 688 | 82.29 | 84.71 | 84.88 | |
| 1304 | 1095 | 1050 | 1001 | 964 | 930 | 303 | 131 | 120 | 638 | 654 | 688 | 52.51 | 79.97 | 82.56 | |
| 1465 | 1322 | 1157 | 1013 | 1049 | 966 | 452 | 273 | 191 | 638 | 654 | 688 | 29.15 | 58.26 | 72.24 | |
| Stages | Upp/% | Dd/mm | Average Offset/mm | Standard Deviation/mm |
|---|---|---|---|---|
| Standing stage | 85~98 | 450~701 | 13.85 | 3.48 |
| 70~84 | 734~961 | 26 | 4.47 | |
| Jointing stage | 85~98 | 450~850 | 27.75 | 9.59 |
| 70~84 | 864~973 | 70.00 | 6.35 | |
| Booting stage | 85~98 | 450~858 | 40.58 | 13.83 |
| 70~84 | 869~991 | 89.86 | 6.72 | |
| Heading stage | 85~98 | 450~850 | 46.44 | 22.35 |
| 70~84 | 860~951 | 91.86 | 7.69 | |
| Filling stage | 85~98 | 450~867 | 47.53 | 17.21 |
| 70~84 | 880~1000 | 109.5 | 16.7 | |
| Maturity stage | 85~98 | 450~850 | 36.88 | 18.26 |
| 70~84 | 860~966 | 120.75 | 30.45 |
| Model Equation | Compensation Value/mm | Applicable Scope | |
|---|---|---|---|
| Dd/mm | Stage | ||
| y = 0.1164x − 334.88 − A | 13.85 | 450~701 | Standing |
| 26 | 734~961 | ||
| 27.75 | 450~850 | Jointing | |
| 70 | 864~973 | ||
| 40.58 | 450~858 | Booting | |
| 89.86 | 869~991 | ||
| 46.44 | 450~850 | Heading | |
| 91.86 | 860~951 | ||
| 47.53 | 450~867 | Filling | |
| 109.5 | 880~1000 | ||
| 36.88 | 450~850 | Maturity | |
| 120.75 | 860~966 | ||
| Model Equation | Compensation Value/mm | Application Scope | |
|---|---|---|---|
| Dd/mm | Stage | ||
| y = 0.1164x − 334.88 − A | 19.93 | 450~1000 | Standing stage |
| 39.84 | 450~850 | Jointing stage to maturity stage | |
| 96.39 | 851~1000 | ||
| Stage | Habw/mm | Hdbw1/mm | Hdbw2/mm | Ev1/mm | Ev2/mm | Aev1/mm | Aev2/mm |
|---|---|---|---|---|---|---|---|
| Standing | 460 | 463 | 457 | 3 | 3 | 9.50 | 9.10 |
| 518 | 507 | 501 | 11 | 17 | |||
| 552 | 545 | 539 | 7 | 13 | |||
| 645 | 650 | 644 | 5 | 1 | |||
| 717 | 733 | 727 | 16 | 10 | |||
| 764 | 773 | 779 | 9 | 15 | |||
| 799 | 791 | 797 | 8 | 2 | |||
| 895 | 889 | 895 | 6 | 0 | |||
| 961 | 961 | 967 | 0 | 6 | |||
| 998 | 968 | 974 | 30 | 24 | |||
| Jointing | 513 | 508 | 496 | 5 | 17 | 19.89 | 19.67 |
| 540 | 563 | 551 | 23 | 11 | |||
| 598 | 601 | 589 | 3 | 9 | |||
| 620 | 604 | 592 | 16 | 28 | |||
| 653 | 697 | 685 | 44 | 32 | |||
| 800 | 793 | 781 | 7 | 19 | |||
| 805 | 800 | 788 | 5 | 17 | |||
| 964 | 1024 | 998 | 60 | 34 | |||
| 996 | 1012 | 986 | 16 | 10 | |||
| Booting | 454 | 490 | 491 | 36 | 37 | 27.70 | 26.30 |
| 520 | 509 | 510 | 11 | 10 | |||
| 600 | 562 | 563 | 38 | 37 | |||
| 500 | 490 | 491 | 10 | 9 | |||
| 670 | 632 | 633 | 38 | 37 | |||
| 700 | 720 | 721 | 20 | 21 | |||
| 774 | 760 | 761 | 14 | 13 | |||
| 840 | 872 | 873 | 32 | 33 | |||
| 899 | 920 | 914 | 21 | 15 | |||
| 953 | 1010 | 1004 | 57 | 51 | |||
| Heading | 448 | 427 | 434 | 21 | 14 | 23.44 | 24.33 |
| 550 | 548 | 555 | 2 | 5 | |||
| 590 | 572 | 579 | 18 | 11 | |||
| 620 | 582 | 589 | 38 | 31 | |||
| 670 | 667 | 674 | 3 | 4 | |||
| 746 | 781 | 788 | 35 | 42 | |||
| 775 | 805 | 812 | 30 | 37 | |||
| 842 | 857 | 864 | 15 | 22 | |||
| 964 | 915 | 911 | 49 | 53 | |||
| Filling | 470 | 479 | 485 | 9 | 15 | 24.67 | 18.44 |
| 550 | 542 | 548 | 8 | 2 | |||
| 630 | 624 | 630 | 6 | 0 | |||
| 680 | 671 | 677 | 9 | 3 | |||
| 710 | 728 | 734 | 18 | 24 | |||
| 800 | 769 | 775 | 31 | 25 | |||
| 845 | 848 | 854 | 3 | 9 | |||
| 900 | 847 | 916 | 53 | 16 | |||
| 970 | 885 | 898 | 85 | 72 | |||
| Maturity | 430 | 424 | 421 | 6 | 9 | 19.30 | 18.90 |
| 500 | 472 | 469 | 28 | 31 | |||
| 550 | 538 | 535 | 12 | 15 | |||
| 730 | 715 | 712 | 15 | 18 | |||
| 750 | 740 | 737 | 10 | 13 | |||
| 790 | 800 | 797 | 10 | 7 | |||
| 850 | 878 | 875 | 28 | 25 | |||
| 930 | 911 | 936 | 19 | 6 | |||
| 940 | 943 | 968 | 3 | 28 | |||
| 980 | 918 | 943 | 62 | 37 |
| Model Equation | Compensation Value/mm | Applicable Scope | |
|---|---|---|---|
| Dd/mm | Stage | ||
| y = 0.1164x − 334.88 − A | 19.93 | 450~950 | Standing stage |
| 39.84 | 450~850 | Jointing stage to maturity stage | |
| 96.39 | 851~950 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Li, C.; Pan, X.; Wang, X.; Zhao, X.; Gao, Y.; Yang, S.; Zhai, C. Model for Detecting Boom Height Based on an Ultrasonic Sensor for the Whole Growth Cycle of Wheat. Agriculture 2024, 14, 21. https://doi.org/10.3390/agriculture14010021
Wu J, Li C, Pan X, Wang X, Zhao X, Gao Y, Yang S, Zhai C. Model for Detecting Boom Height Based on an Ultrasonic Sensor for the Whole Growth Cycle of Wheat. Agriculture. 2024; 14(1):21. https://doi.org/10.3390/agriculture14010021
Chicago/Turabian StyleWu, Jianguo, Chengqian Li, Xiaoyong Pan, Xiu Wang, Xueguan Zhao, Yuanyuan Gao, Shuo Yang, and Changyuan Zhai. 2024. "Model for Detecting Boom Height Based on an Ultrasonic Sensor for the Whole Growth Cycle of Wheat" Agriculture 14, no. 1: 21. https://doi.org/10.3390/agriculture14010021
APA StyleWu, J., Li, C., Pan, X., Wang, X., Zhao, X., Gao, Y., Yang, S., & Zhai, C. (2024). Model for Detecting Boom Height Based on an Ultrasonic Sensor for the Whole Growth Cycle of Wheat. Agriculture, 14(1), 21. https://doi.org/10.3390/agriculture14010021