
Performance Evaluation of a Virtual Test Model of the Frame-Type ROPS for Agricultural Tractors Using FEA




Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Design
2.2. Software
2.3. Simulation Conditions
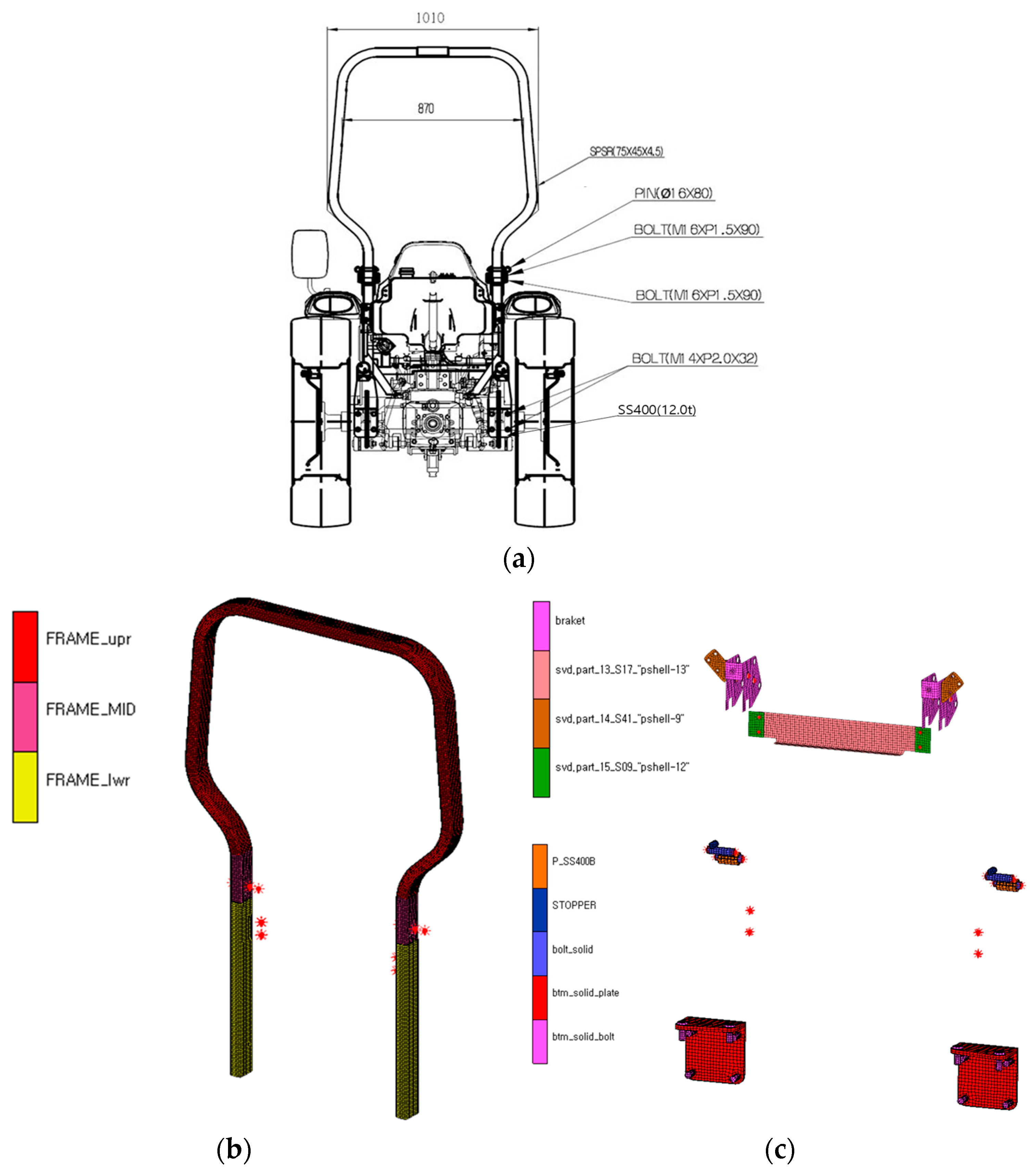
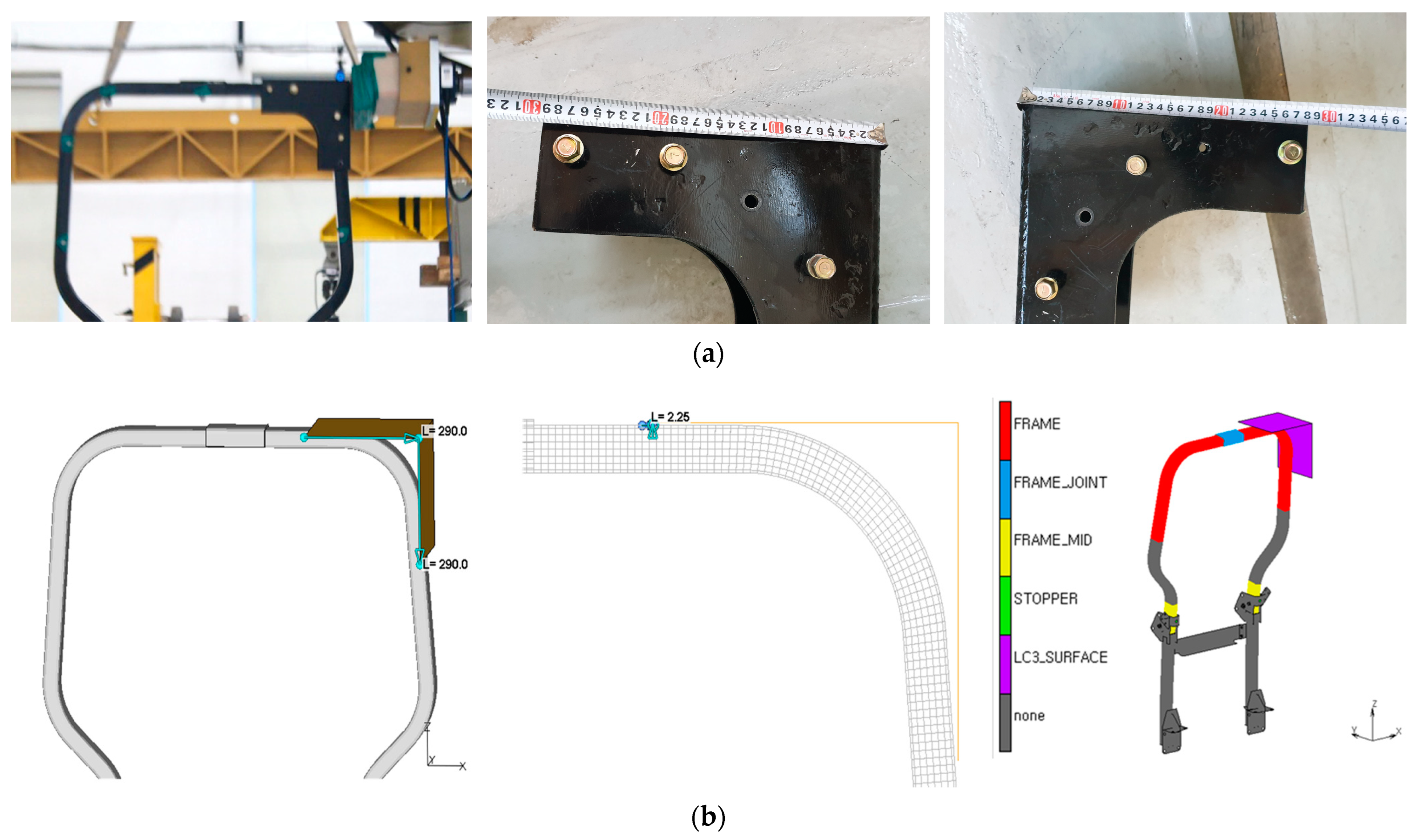
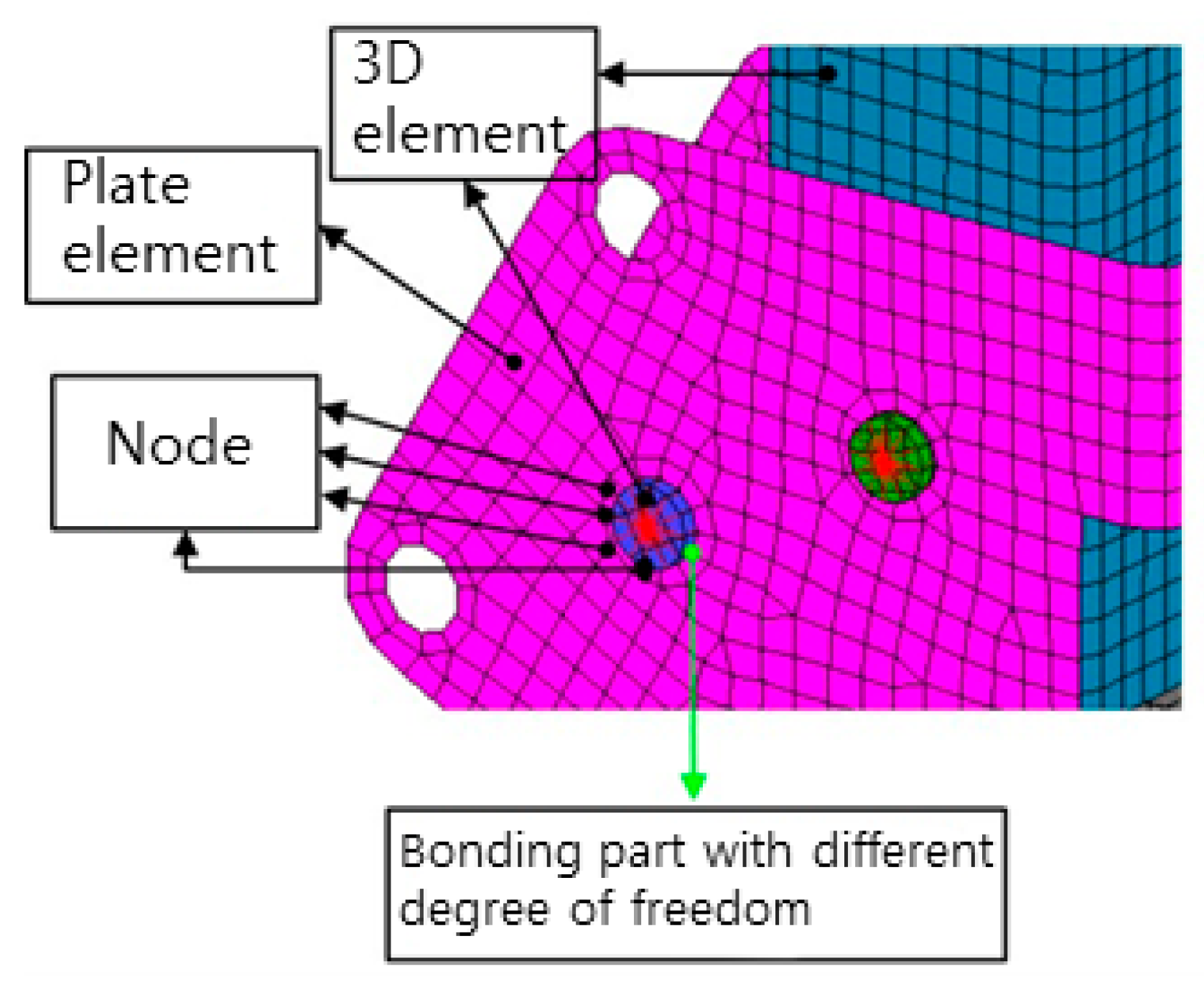
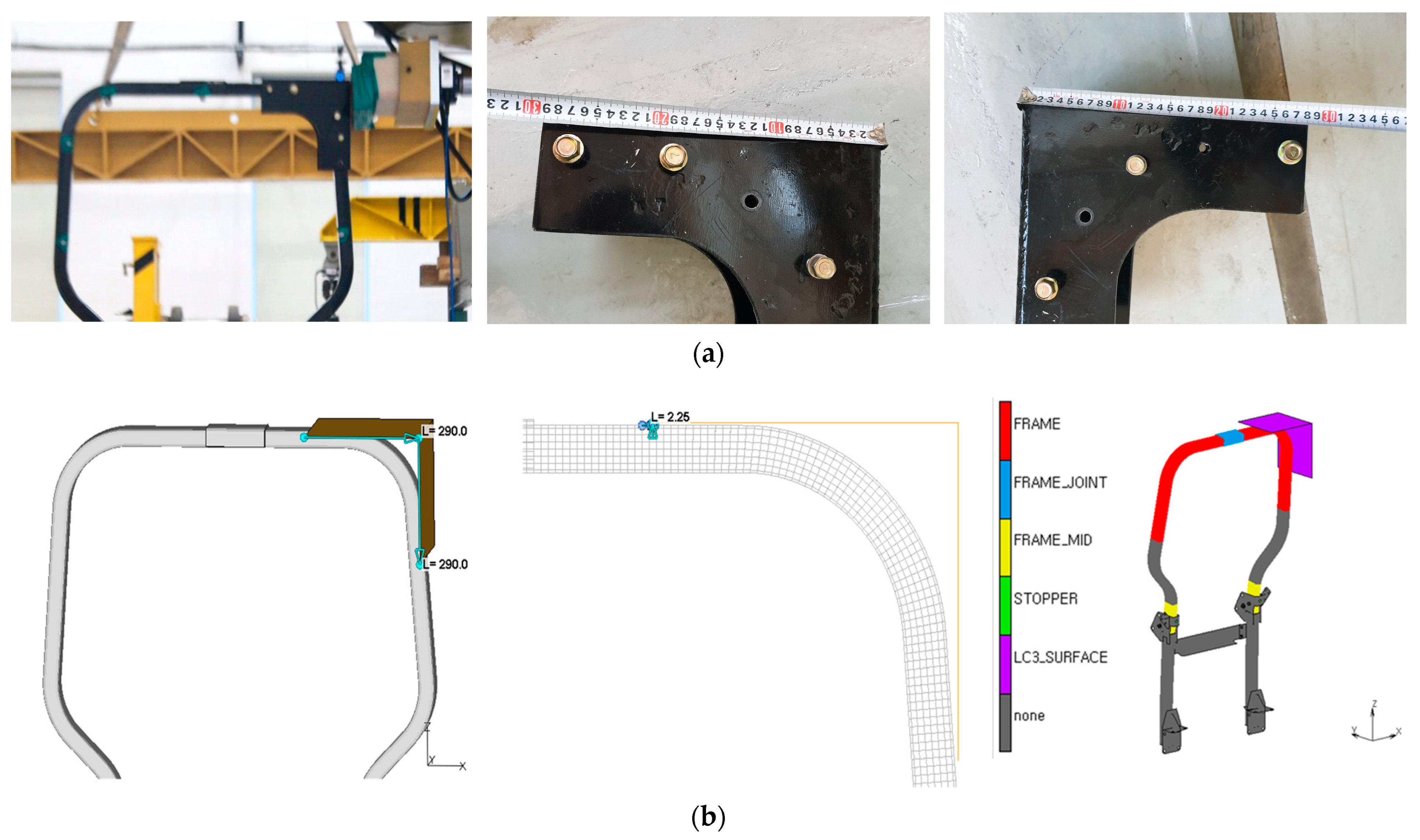
2.3.1. FE Model for the Frame-Type ROPS
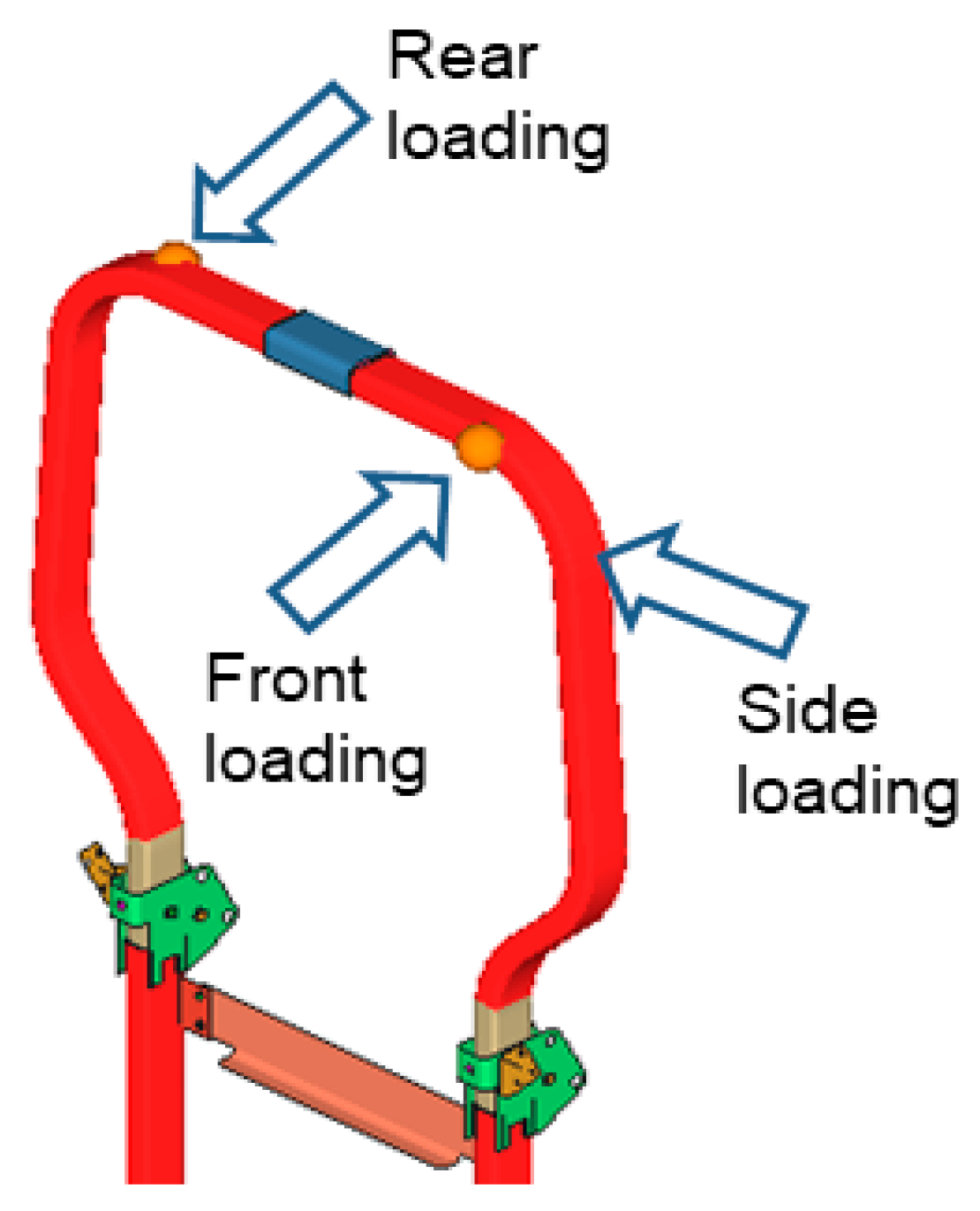
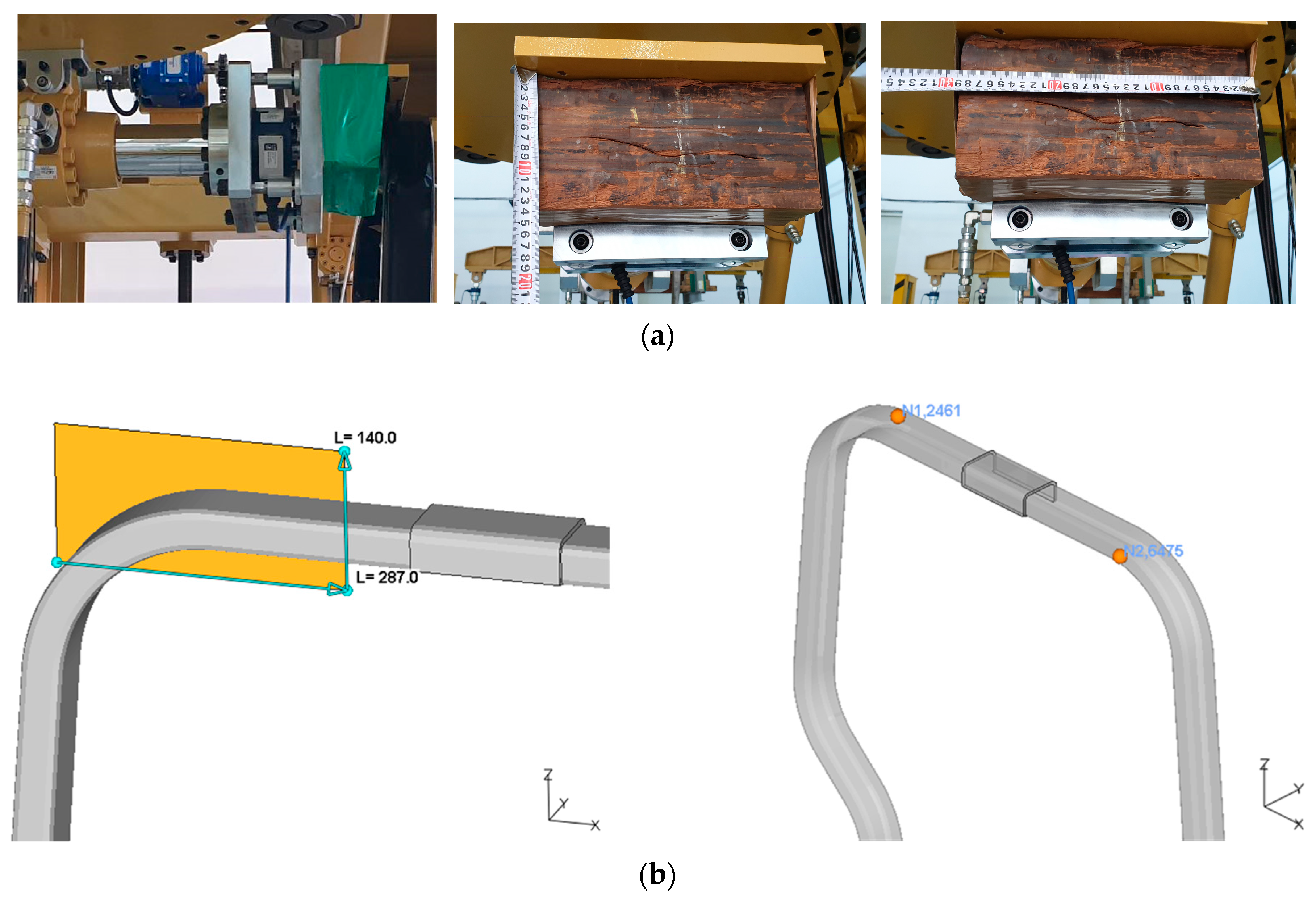
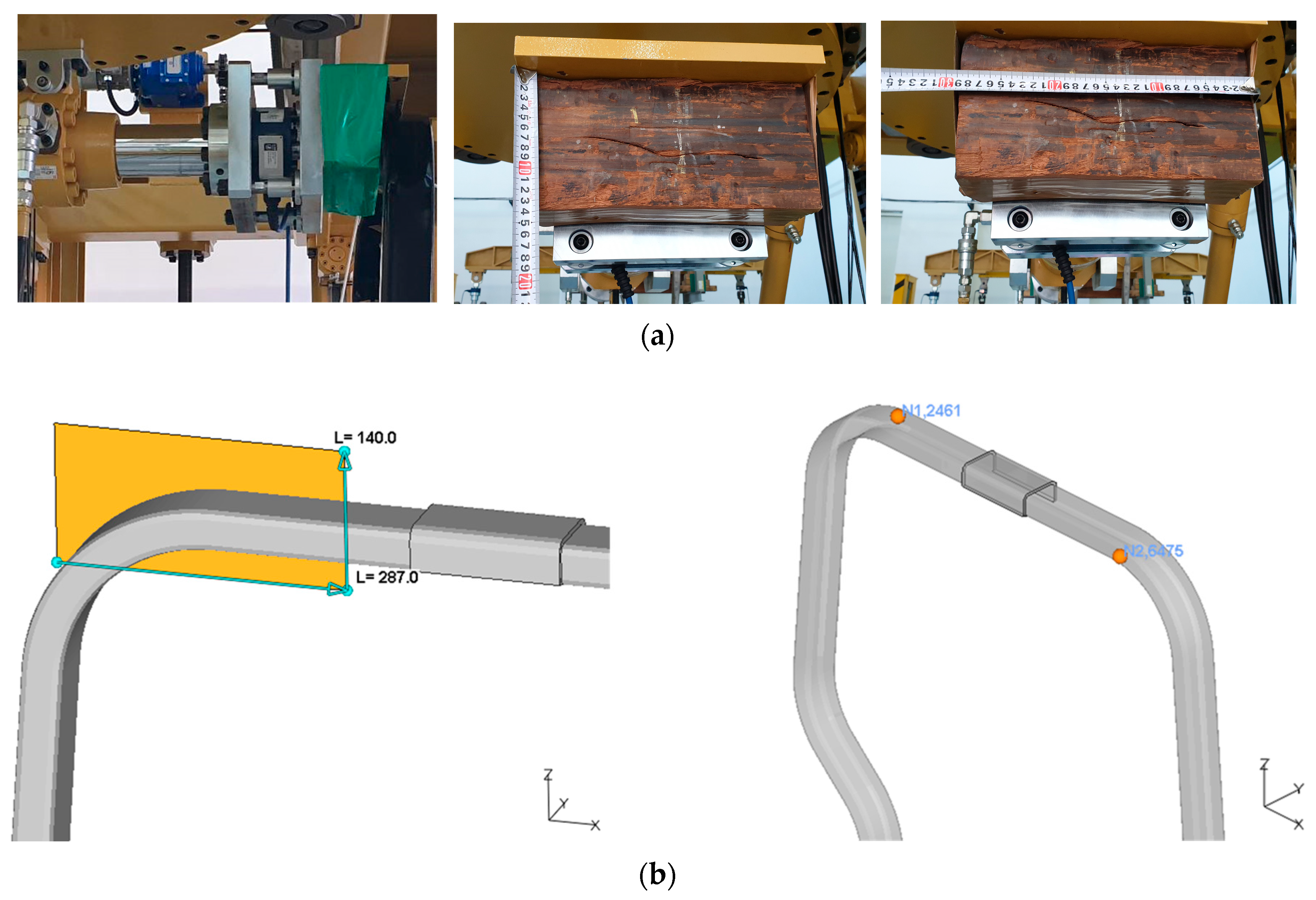
2.3.2. Load Conditions
2.3.3. Boundary Conditions
2.3.4. Selection of the Mesh Size
3. Results and Discussion
3.1. Performance of ROPS Simulation Test
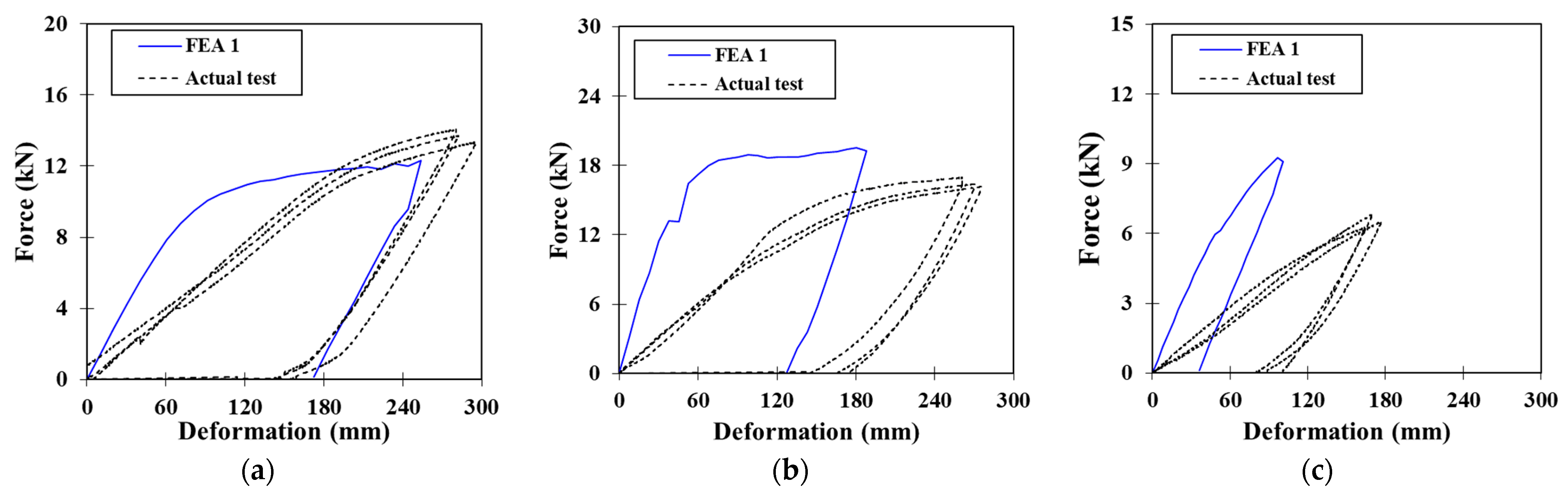
3.1.1. Results by Boundary Conditions Rigid Body Element (FEA 1)
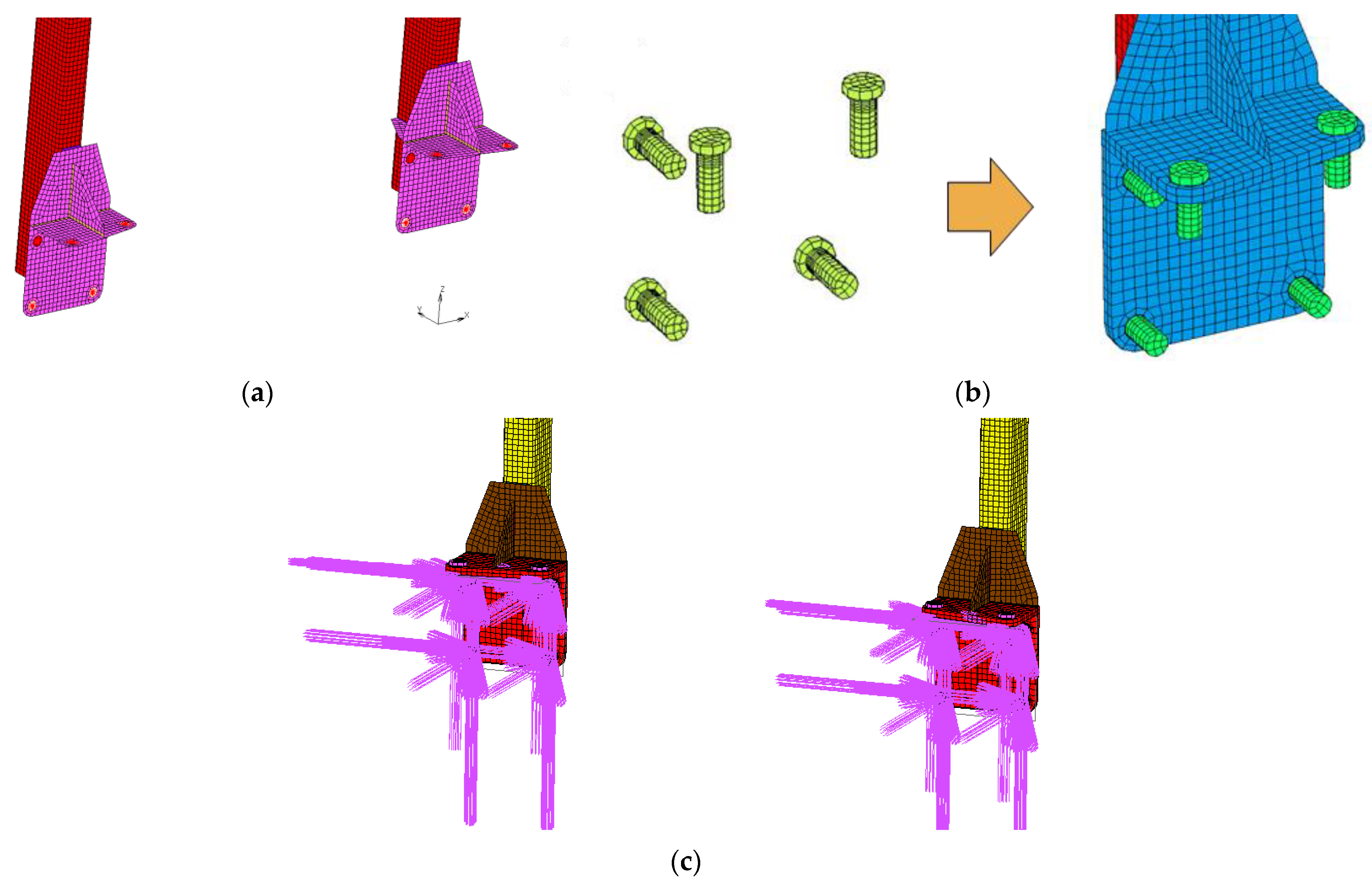
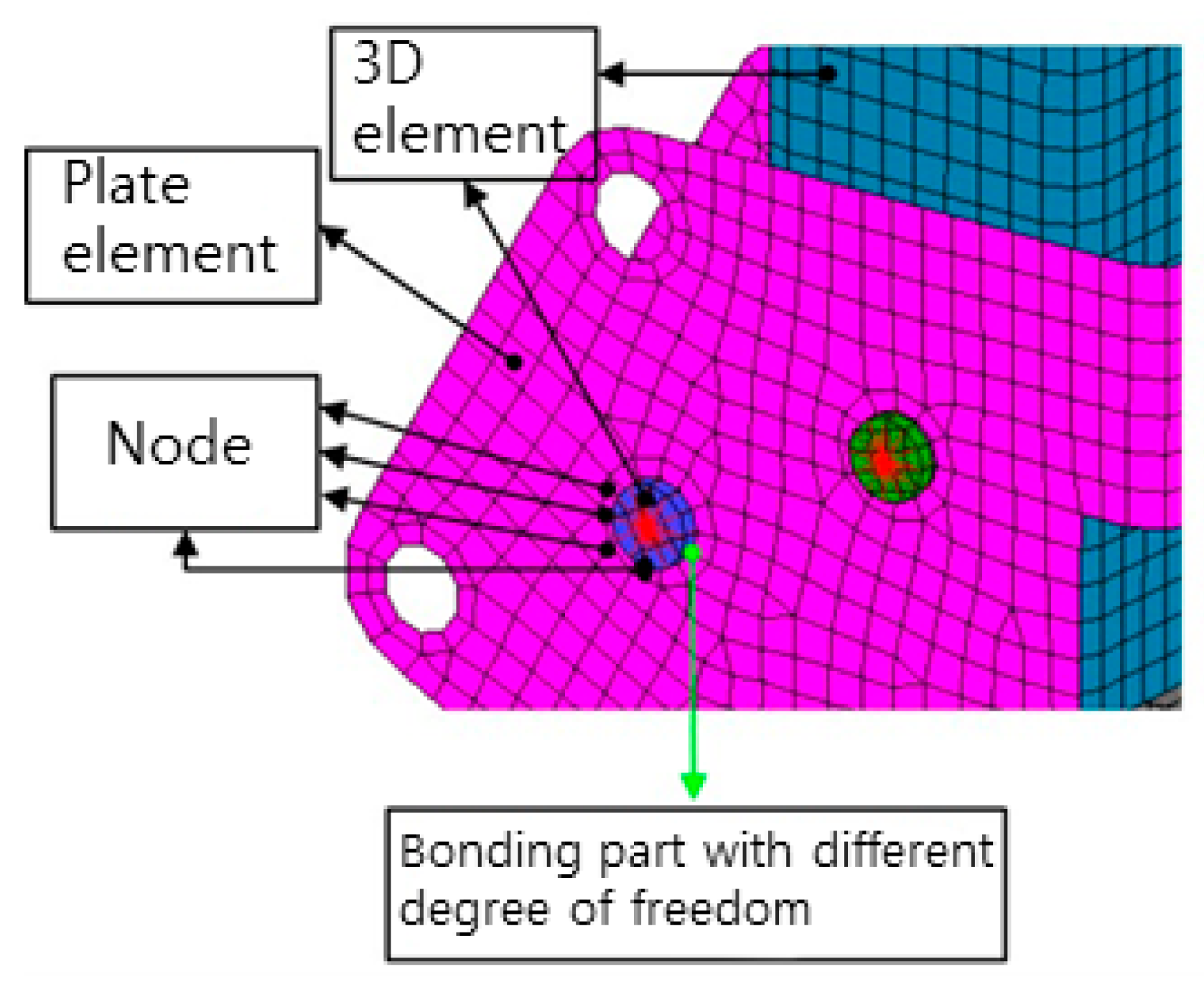
3.1.2. Results by Bolt Modeling and Free Axial Rotation (FEA 2)
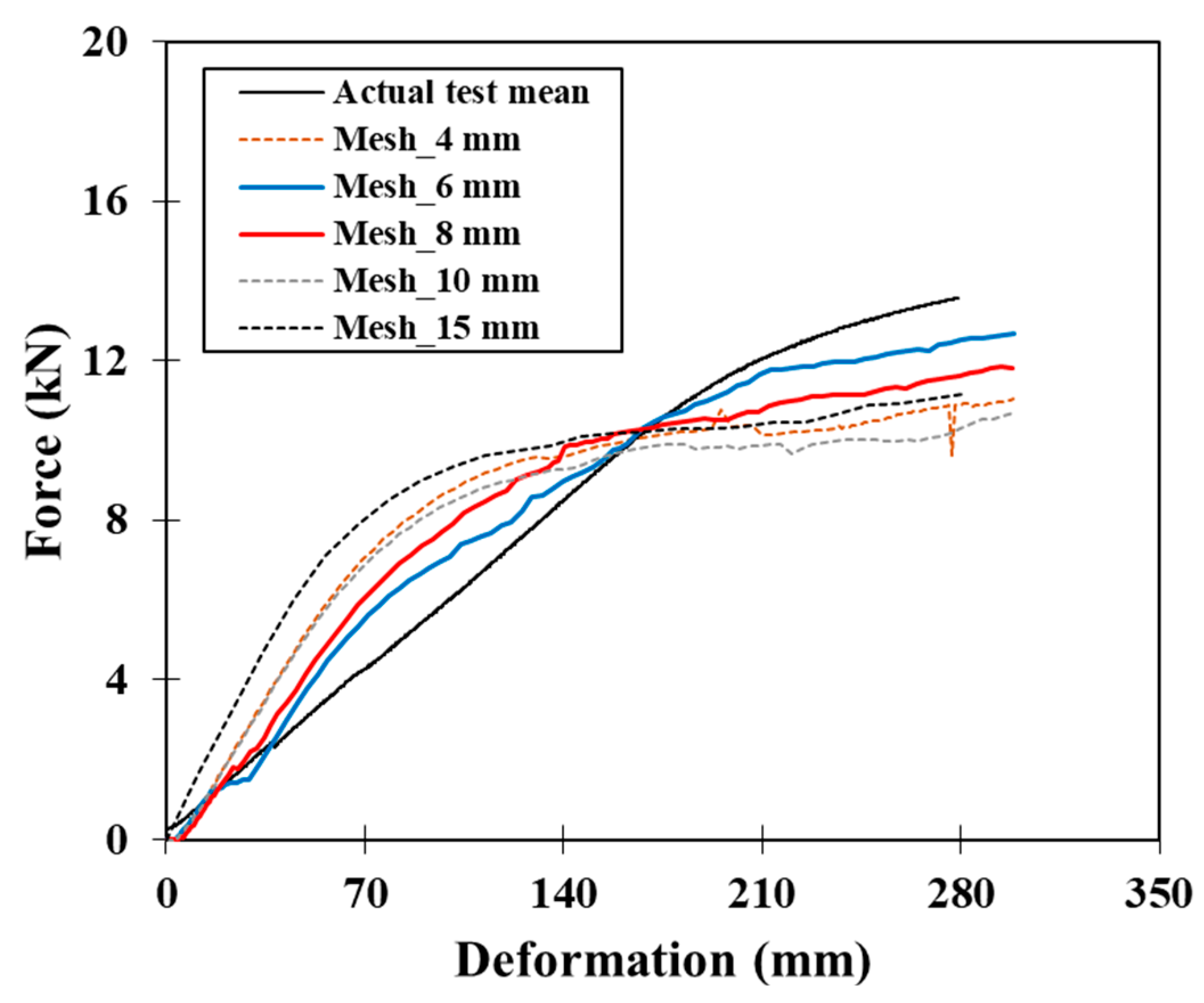
3.2. Simulation Test Results by Mesh Size
4. Conclusions
- (1)
- For the virtual test of the frame-type ROPS, the stress stiffening effect of the tractor and its mounted area must be considered. Therefore, all bolts should be modeled rather than using rigid body constraints. Additionally, the boundary condition of the bolt finite-element model must be set to rotation-free for the bolt itself.
- (2)
- The size of the load plate in the actual performance test was taken into consideration and reflected in the load conditions. In addition, the boundary conditions of the ROPS part directly mounted on the tractor were simulated by applying bolt 3D modeling and free axial rotation rather than rigid body restraints. As a result, the slope of the force–deformation curve was improved. The measurement error with respect to the actual test measurement was reduced by up to 38.3%.
- (3)
- A simulation was conducted to identify the mesh size suitable for the ROPS. As for the simulation time, when the mesh size was 8 or 10 mm, the simulation was relatively short. The error with respect to the measurement from the actual test was the smallest, i.e., at 7.3%, when the mesh size was 6 mm.
- (4)
- We expect that the results of this study will soon allow the establishment of a secure virtual test technology for domestic ROPS. In addition, we expect that it will be possible to propose a domestic virtual test technology to the OECD tractor group. The manufacturers can thus verify ROPS design changes to improve ROPS quality through convenient virtual tests. This is expected to help ensure excellent ROPS quality by reducing costs and saving time.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Rural Development Administration (RDA). Current Status of Damage for Farmers Related to Agricultural Machinery; RDA: Jeonju, Republic of Korea, 2019; pp. 20–38. [Google Scholar]
- Muneki, T. Survey on the accident caused by agricultural machinery and its protective equipment. In Proceedings of the Japan-Korea Joint Seminar on the Safety of Agricultural Machinery, Saitama, Japan, 31 October 2006. [Google Scholar]
- Rautiainen, R.H.; Reynolds, S.J. Mortality and morbidity in agriculture in the United States. J. Agric. Saf. Health 2002, 8, 259–276. [Google Scholar] [CrossRef] [PubMed]
- Antunes, S.M.; Cordeiroa, C.; Teixeir, H.M. Analysis of fatal accidents with tractors in the centre of Portugal: Ten years analysis. Forensic Sci. Int. 2018, 287, 74–80. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.J.; Kim, K.W.; Choi, S.; Kim, J.S.; Kim, Y.Y.; Kim, J.O.; Kim, H.K.; Kwon, S.H. A Study on Improving the Tractor ROPS and Seatbelt use of Korean Farmers. J. Biosyst. Eng. 2010, 35, 294–301. [Google Scholar] [CrossRef]
- Kim, J.H.; Hwang, S.J.; Nam, J.S. Simulation study on the safety of a fastening device of agricultural by-product collector. J. Drive Control 2023, 20, 42–49. [Google Scholar] [CrossRef]
- Lee, D.; Yoo, H.J.; Shin, M.; Oh, J.; Shim, S.B. Analysis of overturning stability of small off-road vehicle. J. Biosyst. Eng. 2023, 48, 309–318. [Google Scholar] [CrossRef]
- Iqbal, M.Z.; Islam, M.N.; Ali, M.; Kiraga, S.; Kim, Y.J.; Chung, S.O. Theoretical overturning analysis of a 2.6-kW two-row walking-type automatic pepper transplanter. J. Biosyst. Eng. 2022, 47, 79–91. [Google Scholar] [CrossRef]
- Lim, R.G.; Kang, Y.S.; Kim, T.J. Measurement uncertainty calculation for improving test reliability of agricultural tractor ROPS test. J. Drive Control 2023, 20, 34–40. [Google Scholar] [CrossRef]
- Karakulak, S.S.; Yetkin, E. Agricultural tractor cabin safety analysis and test correlation. Int. J. Automot. Sci. Technol. 2002, 4, 1–9. [Google Scholar] [CrossRef]
- Blanco, D.; Martin, C.; Ortalde, A. Virtual ROPS and FOPS testing on agricultural tractors according to OECD standard code 4 and 10. In Proceedings of the 14th International LS-DYNA Users Conference, Detroit, MI, USA, 12–14 June 2016. [Google Scholar]
- Fabbri, A.; Ward, S. Validation of a finite element program for the design of roll-over protective framed structures (ROPS) for agricultural tractors. Biosyst. Eng. 2002, 81, 287–296. [Google Scholar] [CrossRef]
- Ha, C.W.; Kim, H.J.; Goo, N.S.; Kwon, Y.D. Finite element analysis of an agricultural cabin based on the OECD standard (code 4). J. Biosyst. Eng. 2003, 28, 431–436. [Google Scholar] [CrossRef]
- Kim, H.J.; Goo, N.S.; Kwon, Y.D.; Ha, C.W.; Jung, H.K. Structural analysis of an agricultural tractor cabin for OECD certification. In Proceedings of the Korean Society of Mechanical Engineers Autumn Conference, Jeju, Republic of Korea, 27–29 June 2001. [Google Scholar]
- Jang, H.; Lee, B. Optimal design of tractor cabin frame using design of experiment of taguch. J. Korea Acad.-Ind. Coop. Soc. 2015, 16, 7377–7384. [Google Scholar] [CrossRef]
- Won, J.G.; Yoon, J.I.; Lee, H.A.; Chung, S.G.; Jeong, J.S. Simulation analysis on static safety of 55Hp-servo-based hydrostatic transmission. J. Drive Control 2022, 19, 34–42. [Google Scholar] [CrossRef]
- Yu, Y.J.; An, Y.C.; Lee, K.H.; Park, J.H.; Lee, D.; Lee, C.H. Fatigue and severity analysis of drive axle parts according to forklift driving environment. J. Drive Control 2023, 20, 24–30. [Google Scholar] [CrossRef]
- Kumar, N.; Tewari, V.K. Modification of reactive muffler in farm tractor to reduce noise level using finite element method. J. Biosyst. Eng. 2023, 48, 165–177. [Google Scholar] [CrossRef]
- Lim, R.G.; Kang, Y.S.; Lee, D.H.; Kim, W.S.; Lee, J.H.; Kim, Y.J. Agricultural tractor roll over protective structure (ROPS) test using simplified ROPS model. Korea J. Agric. Sci. 2023, 49, 771–783. [Google Scholar] [CrossRef]
- Agius, D.J.; Kourousis, K.I.; Takla, M.; Subic, A. Enhanced non-linear material modelling for analysis and qualification of rollover protective structures. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2015, 230, 1558–1568. [Google Scholar] [CrossRef]
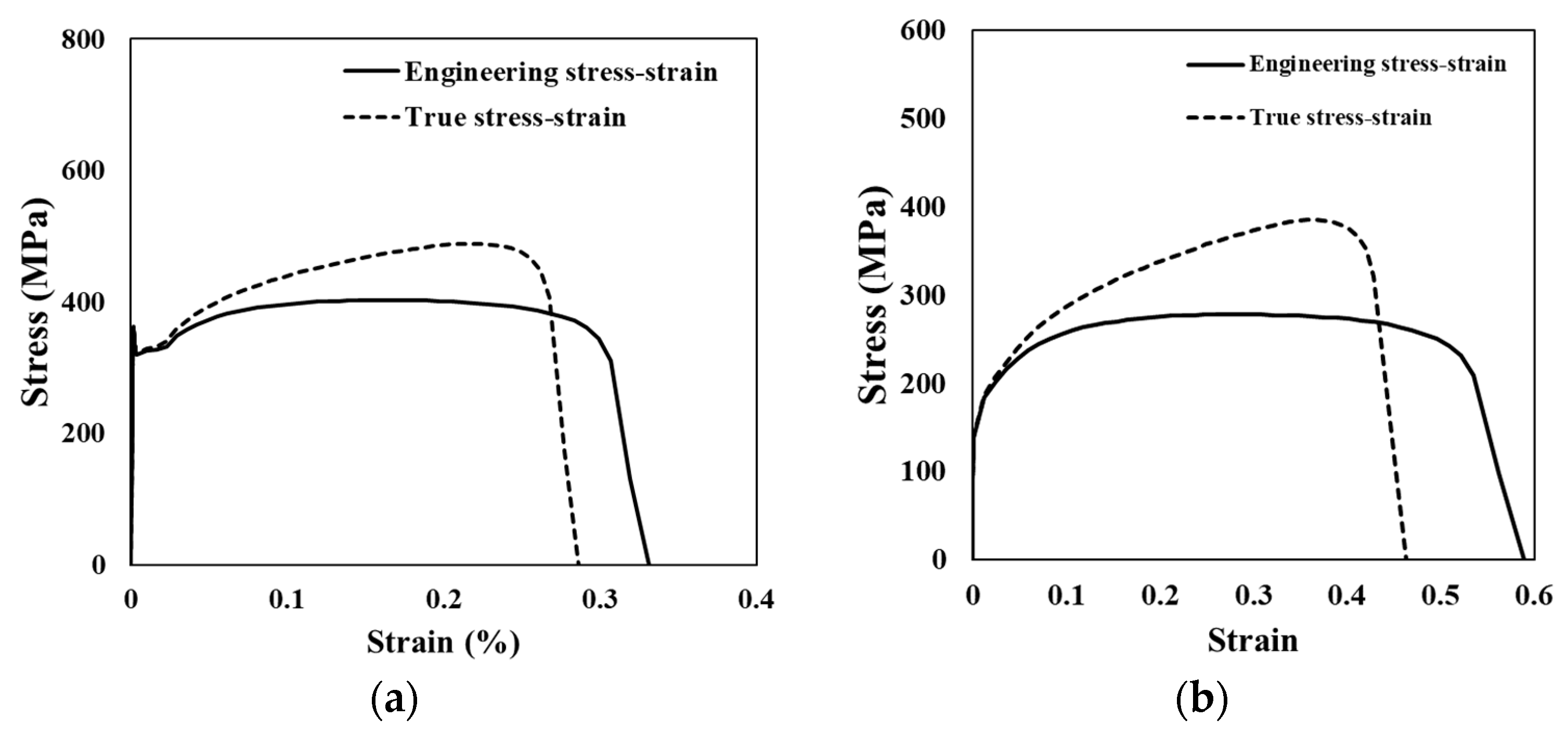
- Song, H.S.; Kim, Y.Y.; Lim, R.G. Determination of the properties of structural steel for agricultural tractor roll-over protective structure by tensile test and finite element analysis. J. Korean Soc. Mech. Technol. 2019, 21, 567–576. [Google Scholar] [CrossRef]
- OECD (Organization for Economic Cooperation and Development). OECD Standard Code for the Official Testing of Protective Structures on Agricultural and Forestry Tractors (Statics Test); Tractor Standard Code 4-OECD; OECD Headquarters: Paris, France, 2021. [Google Scholar]
- KS B 7950; Tractors for Agriculture and Forestry-Two-Post Roll-Over Protective Structures-Virtual Statistic Test Method and Acceptance Conditions. Korea Standards Association: Seoul, Republic of Korea, 2022.
- Yoon, C.Y. Efficient adaptive finite element mesh generation for dynamics. Comput. Struct. Eng. Inst. Korea 2013, 26, 385–392. [Google Scholar] [CrossRef]
- Heo, J.H.; Kim, H.S. Bending moment calculation method and optimum element size for finite element analysis with continuum elements. Comput. Struct. Eng. Inst. Korea 2018, 31, 9–16. [Google Scholar] [CrossRef]
- Kim, S.W.; Jung, H.C. Investigation on the effect of mesh density in FE analysis for prediction of mechanical behavior of a PCM. In Proceedings of the Korean Society for Technology of Plasticity Conference, Jeju, Republic of Korea, 10–11 May 2012. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | Geometric | |||
|---|---|---|---|---|
| Components | Specification (Number) | Components | Properties | No. of Elements |
| Nodes | 26,474 | Frame upper part | 3D Shell | 14,565 |
| Frame mid part | 3D Shell | 1518 | ||
| Elements | 25,951 | Frame lower part | 3D Shell | 5786 |
| Frame weld | 3D Shell | 142 | ||
| Quad | 24,654 | Bolt case | 3D Solid | 144 |
| Stopper bolt | 3D Solid | 72 | ||
| Tria | 217 | Bolt | 3D Solid | 652 |
| Bottom plate | 3D Solid | 2336 | ||
| Hexa | 792 | Bottom bolt | 3D Solid | 1576 |
| Octagon | 276 | Folding part bolt | 3D thin walled | 4 |
| Material Properties | ||||
| Components | Mass Density (kg/m3) | Elastic Modulus (GPa) | Poisson’s Ratio | No. of Elements |
| SPSR | 7900 | 200 | 0.28 | 42,348 |
| SS400 | 7900 | 200 | 0.28 | 8529 |
| S45C Stopper | 7850 | 205 | 0.29 | 76 |
| S45C Bolt | 7850 | 205 | 0.29 | 652 |
| Division | Existing Methods (FEA 1) | Study Methods (FEA 2) |
|---|---|---|
| ROPS mounting part | Rigid restraints | Bolts modeled Reflection physical property |
| ROPS folding part | Rigid restraints | Between plate element and 3D element was set rotation-free in the axial direction |
| Mesh size | Simple selection of large or small meshes | Apply mesh after performing simulation tests for each mesh size |
| Load Direction | Force (kN) | Maximum Deformation (mm) | ||||
|---|---|---|---|---|---|---|
| Simulated (FEA 1) | Measured | Error (%) | Simulated (FEA 1) | Measured | Error (%) | |
| Rear | 12.301 | 13.681 | 10.1 | 253.9 | 285.9 | 11.2 |
| Side | 19.515 | 16.308 | 19.7 | 180.6 | 269.2 | 32.9 |
| Front | 9.267 | 6.461 | 43.4 | 96.9 | 170.2 | 43.1 |
| Test | N | Mean | SD | SE | t | df | p | Mean Difference | |
|---|---|---|---|---|---|---|---|---|---|
| Actual rear/ FEA rear | Force | 3 | 13.7 | 0.353 | 0.204 | 6.77 | 2.00 | 0.021 * | 1.38 |
| Deformation | 3 | 286 | 8.11 | 4.68 | 6.85 | 2.00 | 0.021 * | 32.1 | |
| Actual side/ FEA side | Force | 3 | 16.3 | 0.0402 | 0.0232 | −138 | 2.00 | 0.001 * | −3.21 |
| Deformation | 3 | 269 | 7.46 | 4.31 | 20.6 | 2.00 | 0.002 * | 88.6 | |
| Actual front/ FEA front | Force | 3 | 6.46 | 0.195 | 0.112 | −25.0 | 2.00 | 0.002 * | −2.81 |
| Deformation | 3 | 170 | 6.46 | 3.73 | 19.7 | 2.00 | 0.003 * | 73.3 | |
| Load Direction | Force (kN) | Maximum Deformation (mm) | ||||
|---|---|---|---|---|---|---|
| Simulated (FEA 2) | Measured | Error (%) | Simulated (FEA 2) | Measured | Error (%) | |
| Rear | 12.789 | 13.681 | 6.5 | 298.5 | 285.9 | 4.4 |
| Side | 17.135 | 16.308 | 5.1 | 243.8 | 269.2 | 9.4 |
| Front | 6.911 | 6.461 | 7.0 | 153.9 | 170.2 | 9.6 |
| Test | N | Mean | SD | SE | t | df | p | Mean Difference | |
|---|---|---|---|---|---|---|---|---|---|
| Actual rear/ FEM rear | Force | 3 | 13.7 | 0.353 | 0.204 | 4.38 | 2.00 | 0.054 | 0.892 |
| Deformation | 3 | 286 | 8.11 | 4.68 | −2.68 | 2.00 | 0.116 | −12.5 | |
| Actual side/ FEM side | Force | 3 | 16.3 | 0.0402 | 0.0232 | −35.7 | 2.00 | 0.001 * | −0.827 |
| Deformation | 3 | 269 | 7.46 | 4.31 | 0.028 | 2.00 | 0.028 * | 25.4 | |
| Actual front/ FEM front | Force | 3 | 6.46 | 0.195 | 0.112 | −4.01 | 2.00 | 0.057 | −0.450 |
| Deformation | 3 | 170 | 6.46 | 3.73 | 4.37 | 2.00 | 0.049 * | 16.3 | |
| Mesh Size (mm) | 4 | 6 | 8 | 10 | 15 |
|---|---|---|---|---|---|
| Simulation time (s) | 21,285 | 8315 | 3383 | 2540 | 4605 |
| Force (kN) | 11.045 | 12.687 | 11.830 | 10.684 | 11.147 |
| Error (%) | 19.3 | 7.3 | 13.5 | 21.9 | 18.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, R.-G.; Kim, W.-S.; Do, Y.-W.; Siddique, M.A.A.; Kim, Y.-J. Performance Evaluation of a Virtual Test Model of the Frame-Type ROPS for Agricultural Tractors Using FEA. Agriculture 2023, 13, 2004. https://doi.org/10.3390/agriculture13102004
Lim R-G, Kim W-S, Do Y-W, Siddique MAA, Kim Y-J. Performance Evaluation of a Virtual Test Model of the Frame-Type ROPS for Agricultural Tractors Using FEA. Agriculture. 2023; 13(10):2004. https://doi.org/10.3390/agriculture13102004
Chicago/Turabian StyleLim, Ryu-Gap, Wan-Soo Kim, Young-Woo Do, Md. Abu Ayub Siddique, and Yong-Joo Kim. 2023. "Performance Evaluation of a Virtual Test Model of the Frame-Type ROPS for Agricultural Tractors Using FEA" Agriculture 13, no. 10: 2004. https://doi.org/10.3390/agriculture13102004
APA StyleLim, R.-G., Kim, W.-S., Do, Y.-W., Siddique, M. A. A., & Kim, Y.-J. (2023). Performance Evaluation of a Virtual Test Model of the Frame-Type ROPS for Agricultural Tractors Using FEA. Agriculture, 13(10), 2004. https://doi.org/10.3390/agriculture13102004