
The Airflow Field Characteristics of UAV Flight in a Greenhouse


Abstract
:1. Introduction
2. Materials and Methods
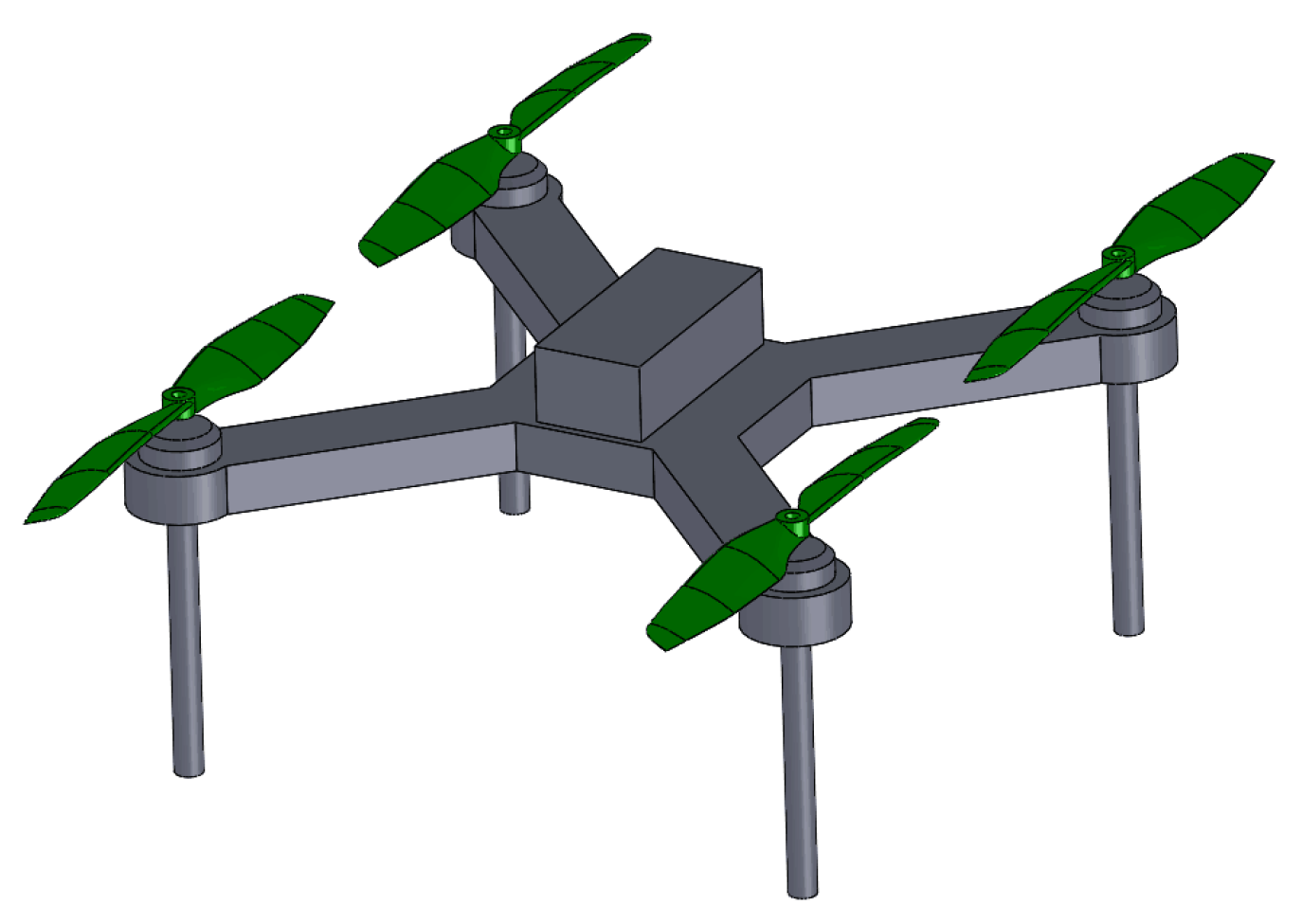
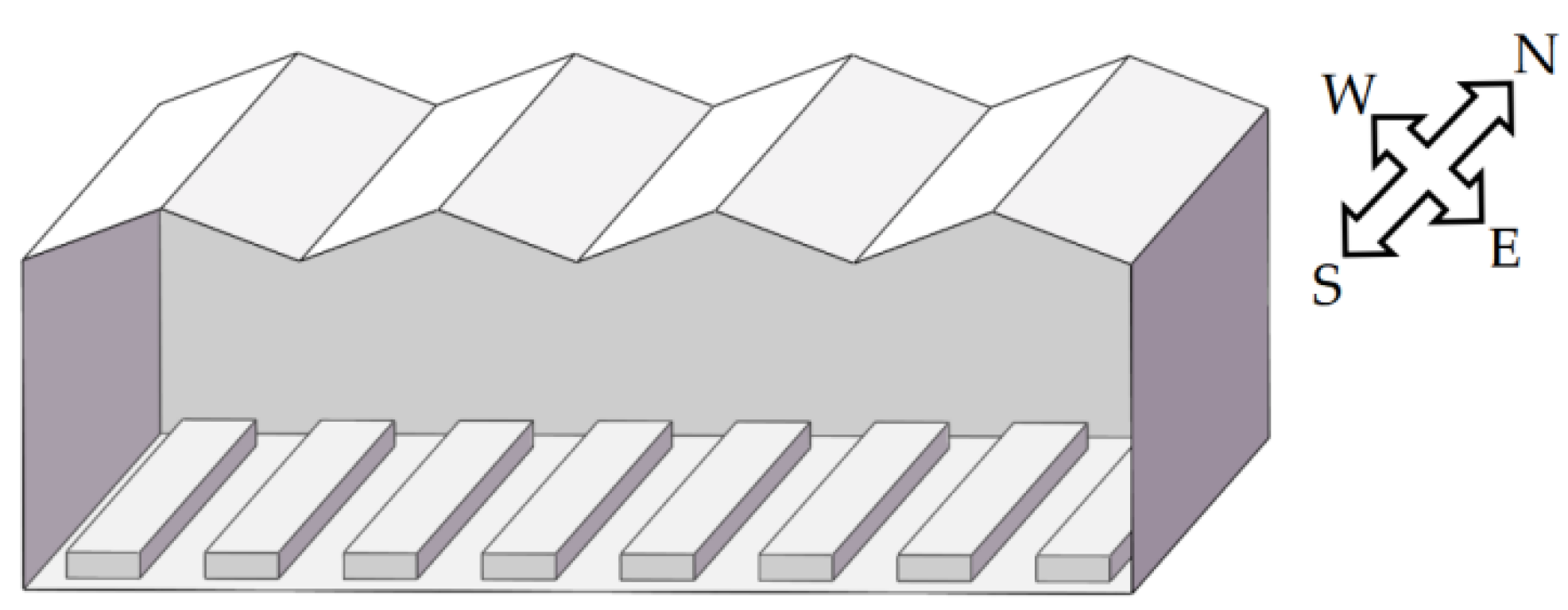
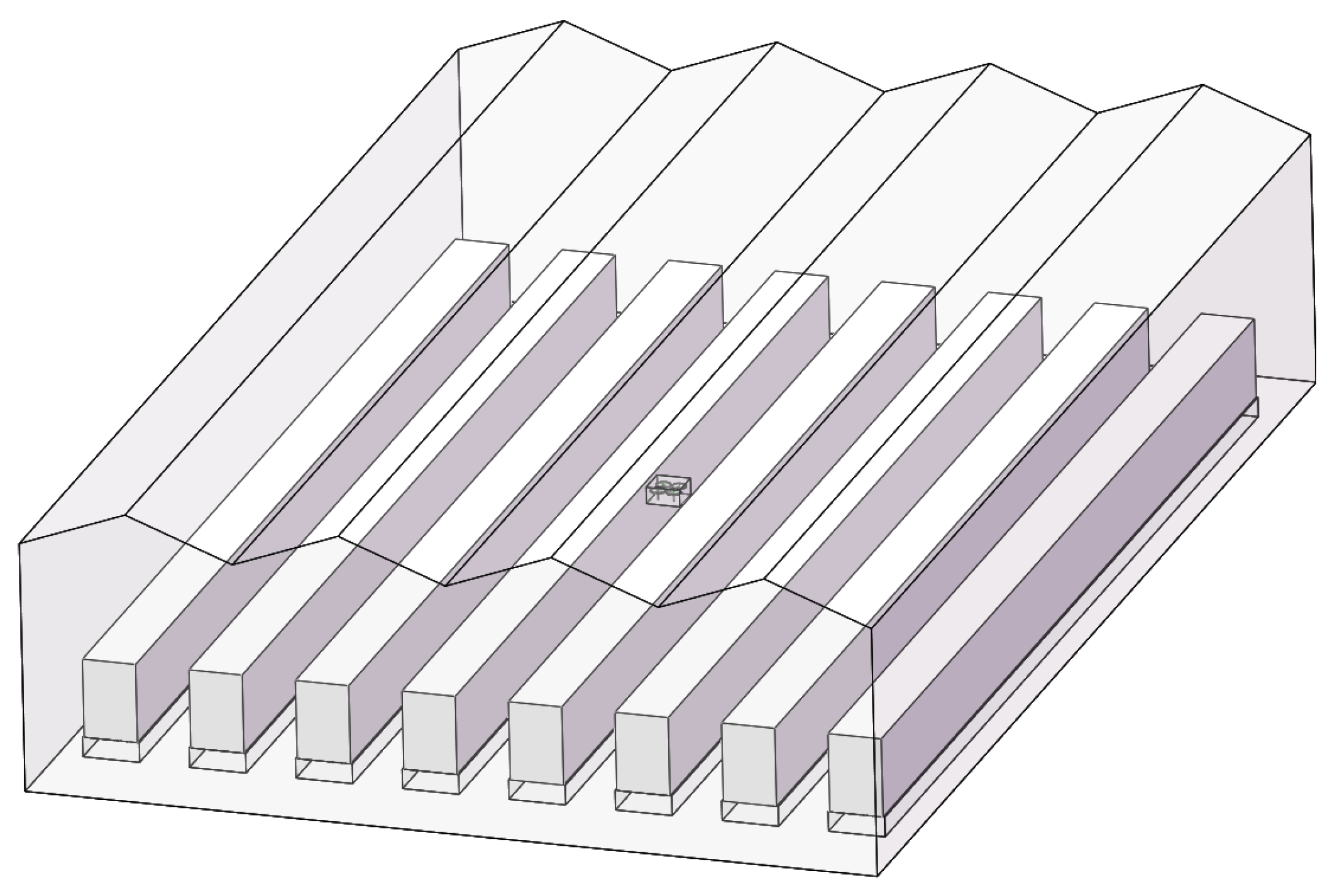
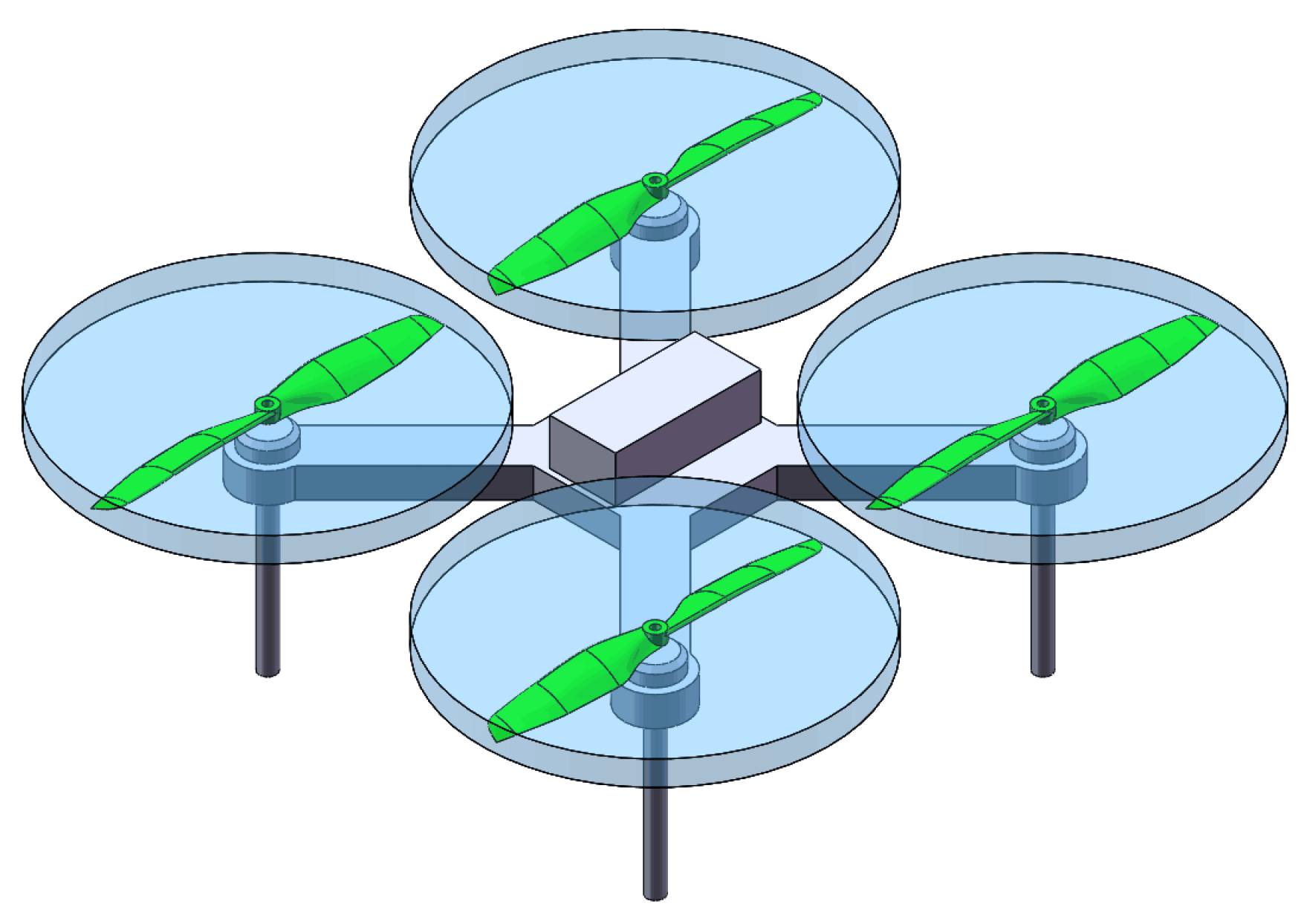
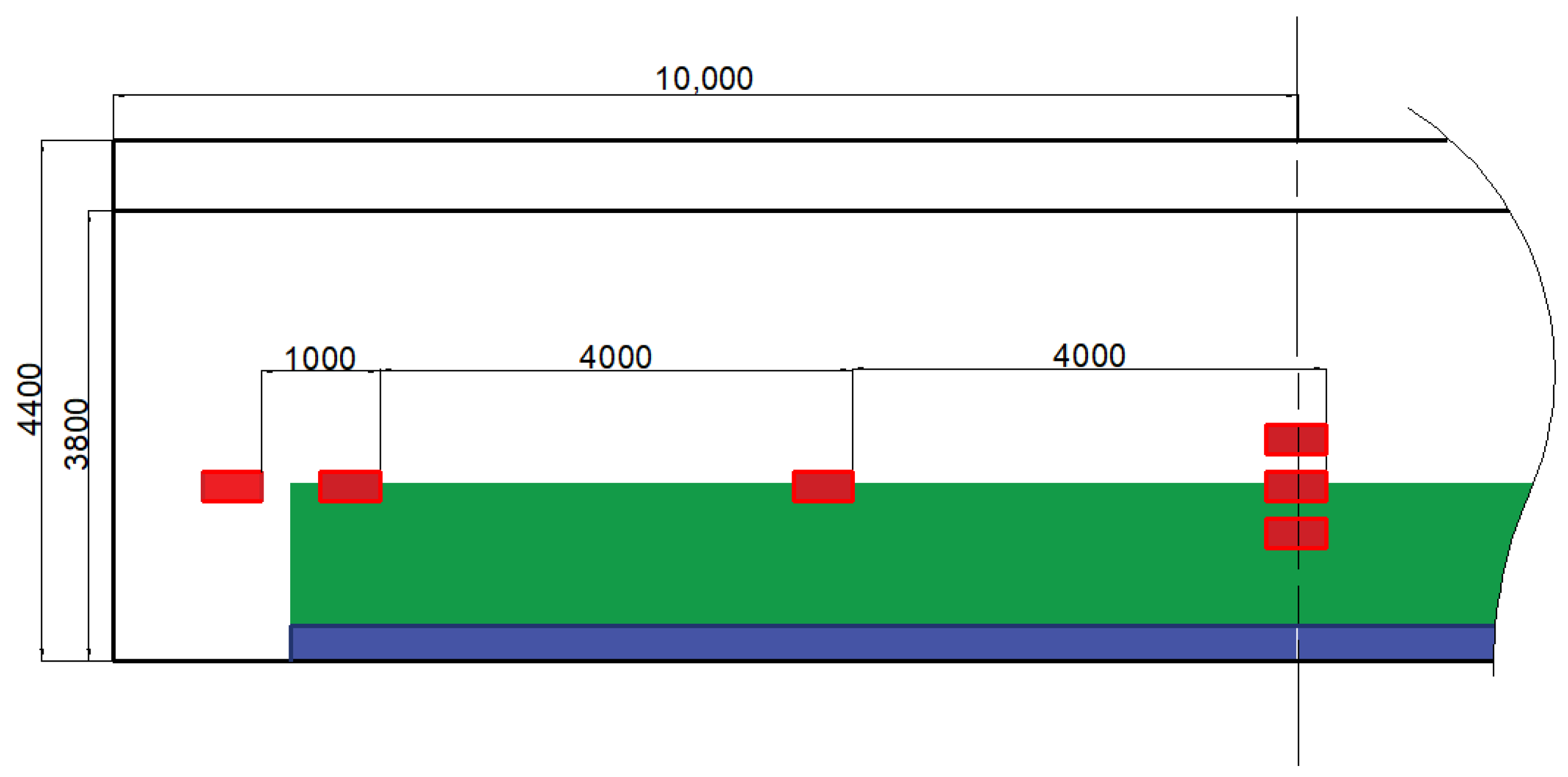
2.1. Establishment of the Simulation Model
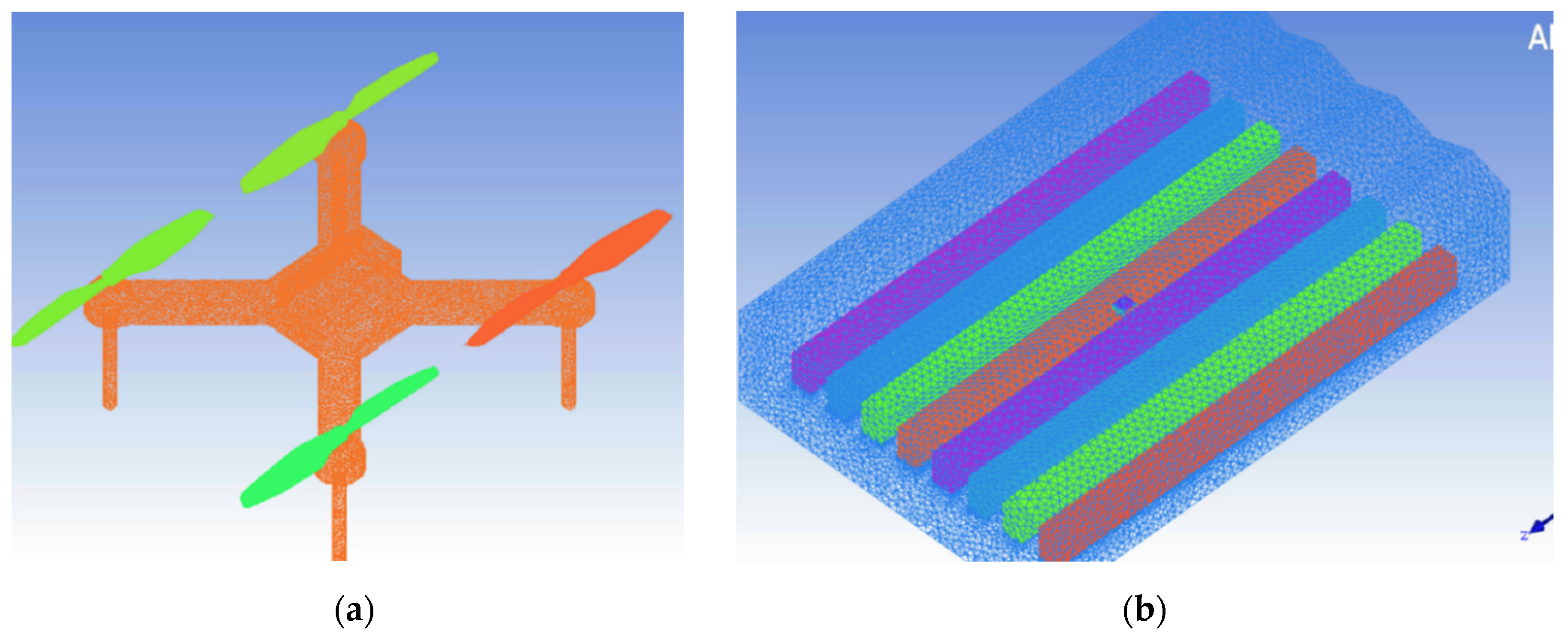
2.2. Grid Division
2.3. Solution Settings
3. Results
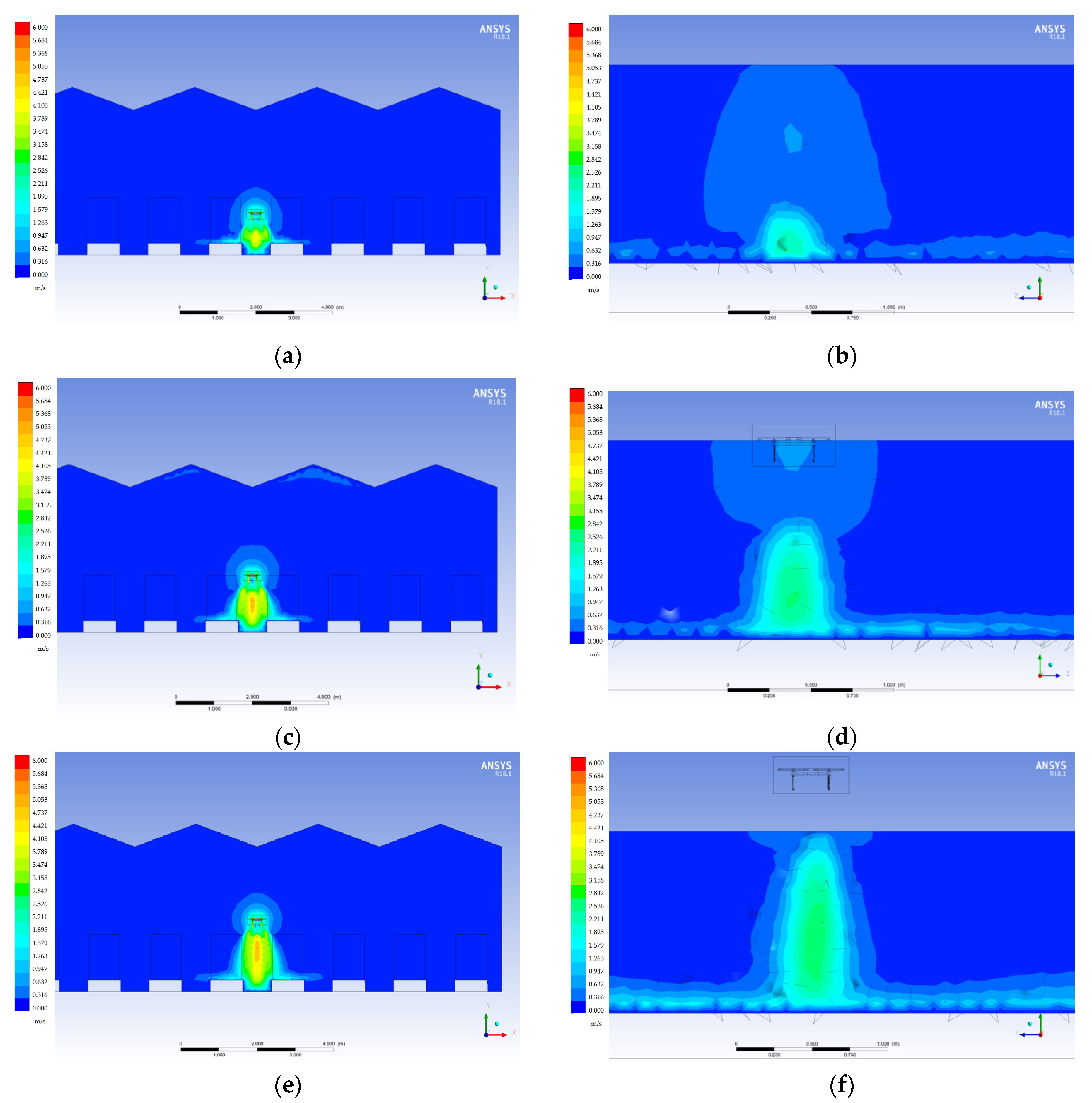
3.1. Effect of Flow Field on Crops
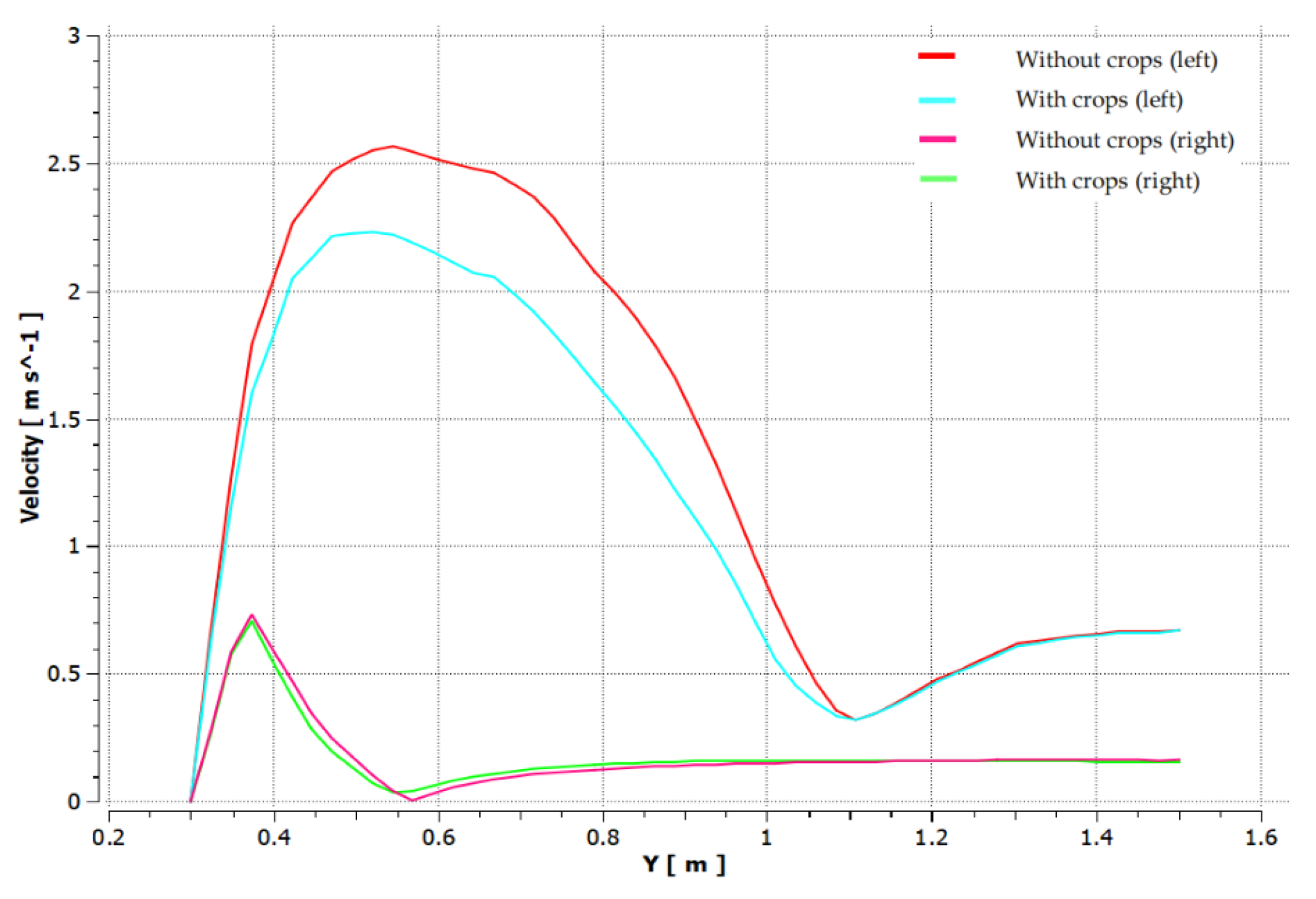
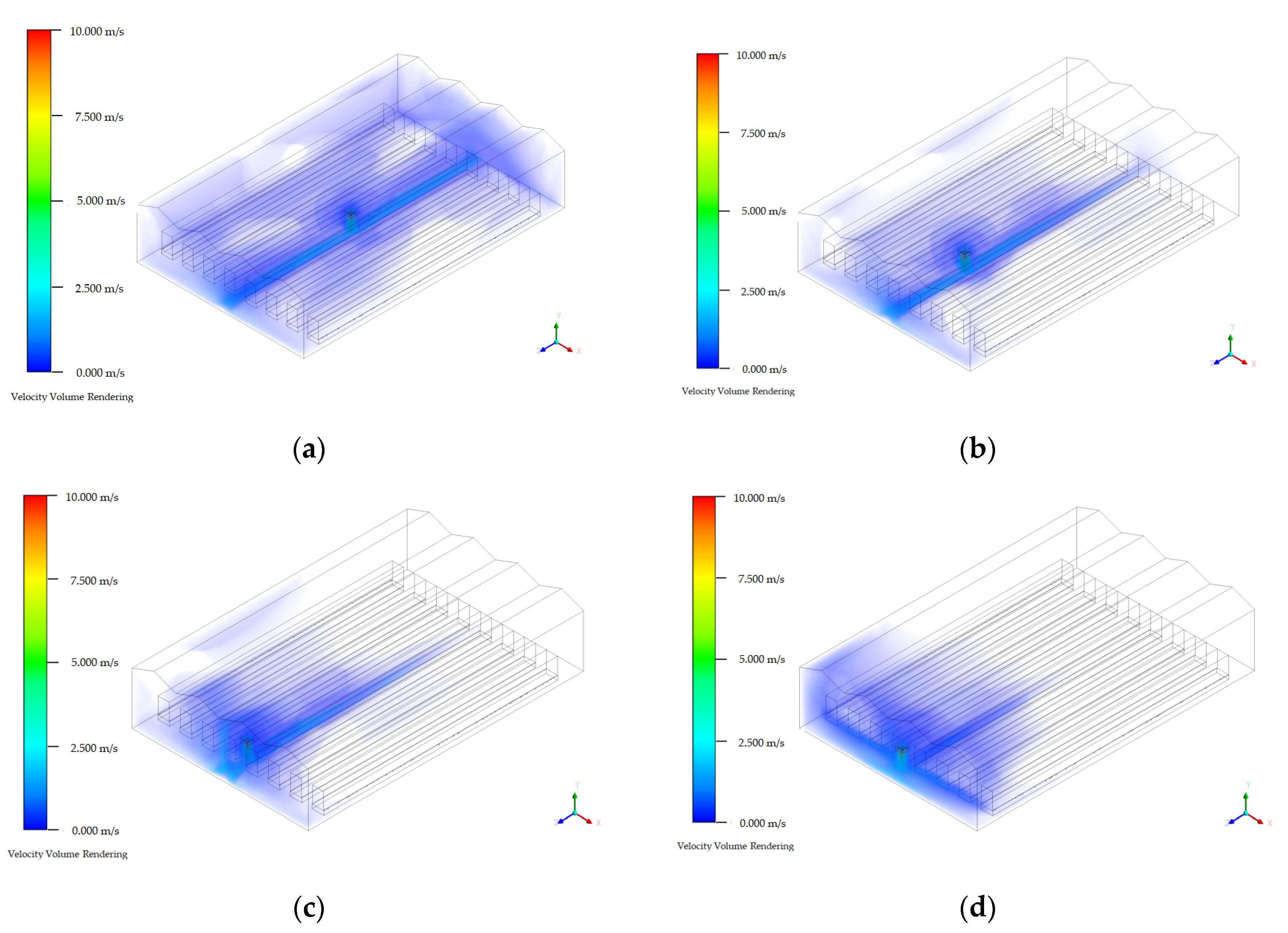
3.2. Effects of Crops on the Flow Field
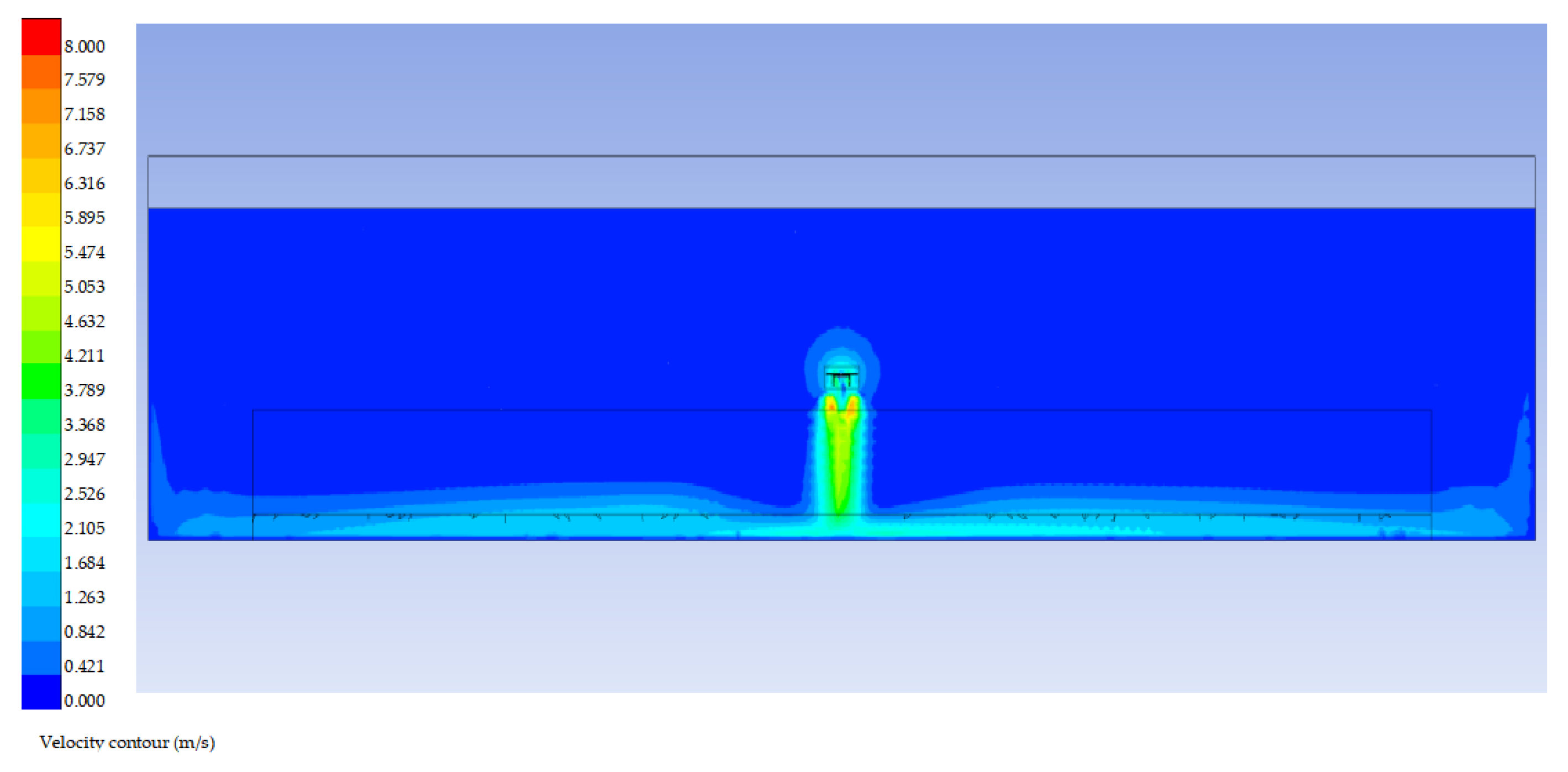
3.3. Effect of Greenhouse Structure on Flow Field
3.4. Effect of Flight State on Flow Field
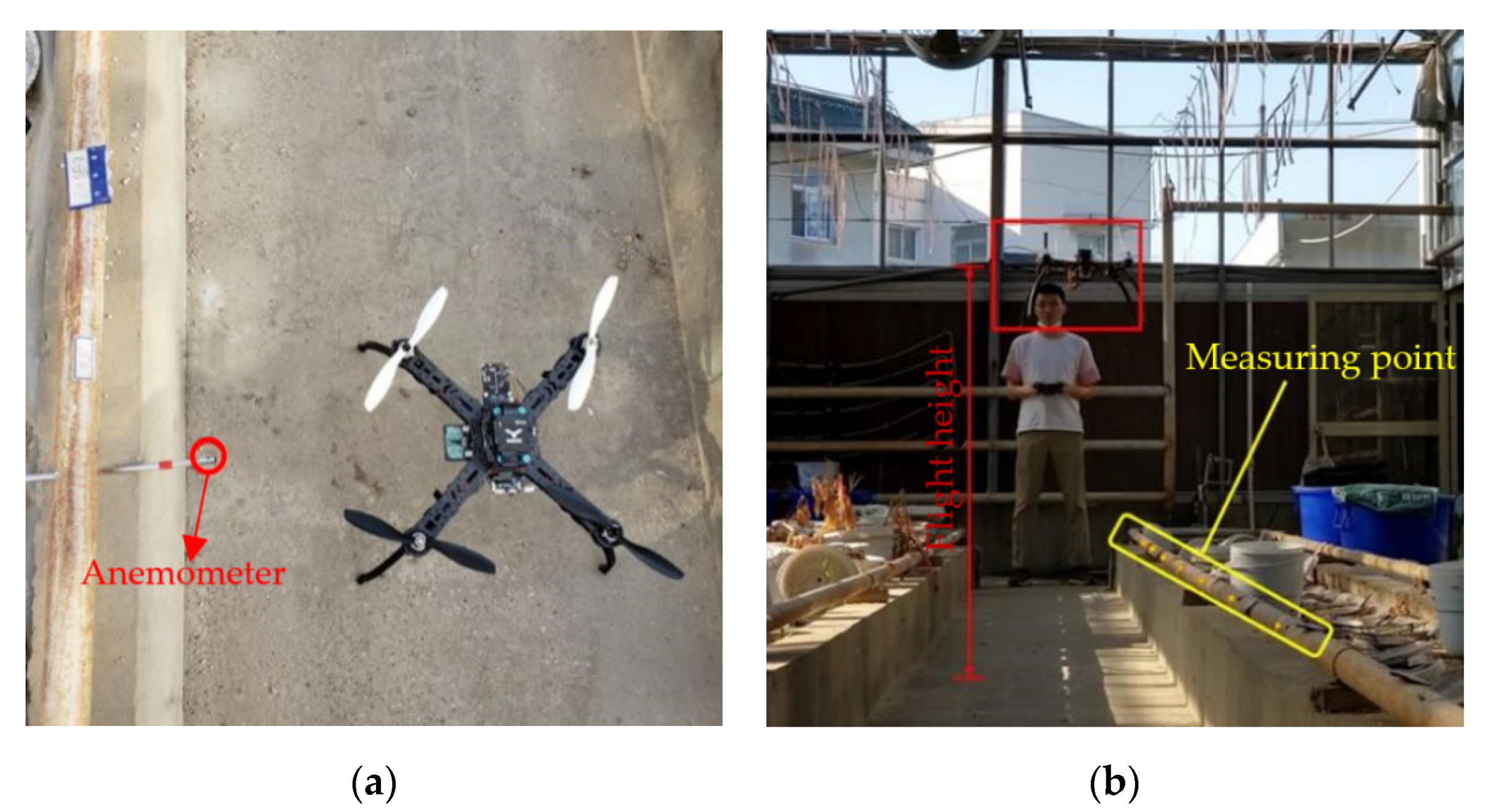
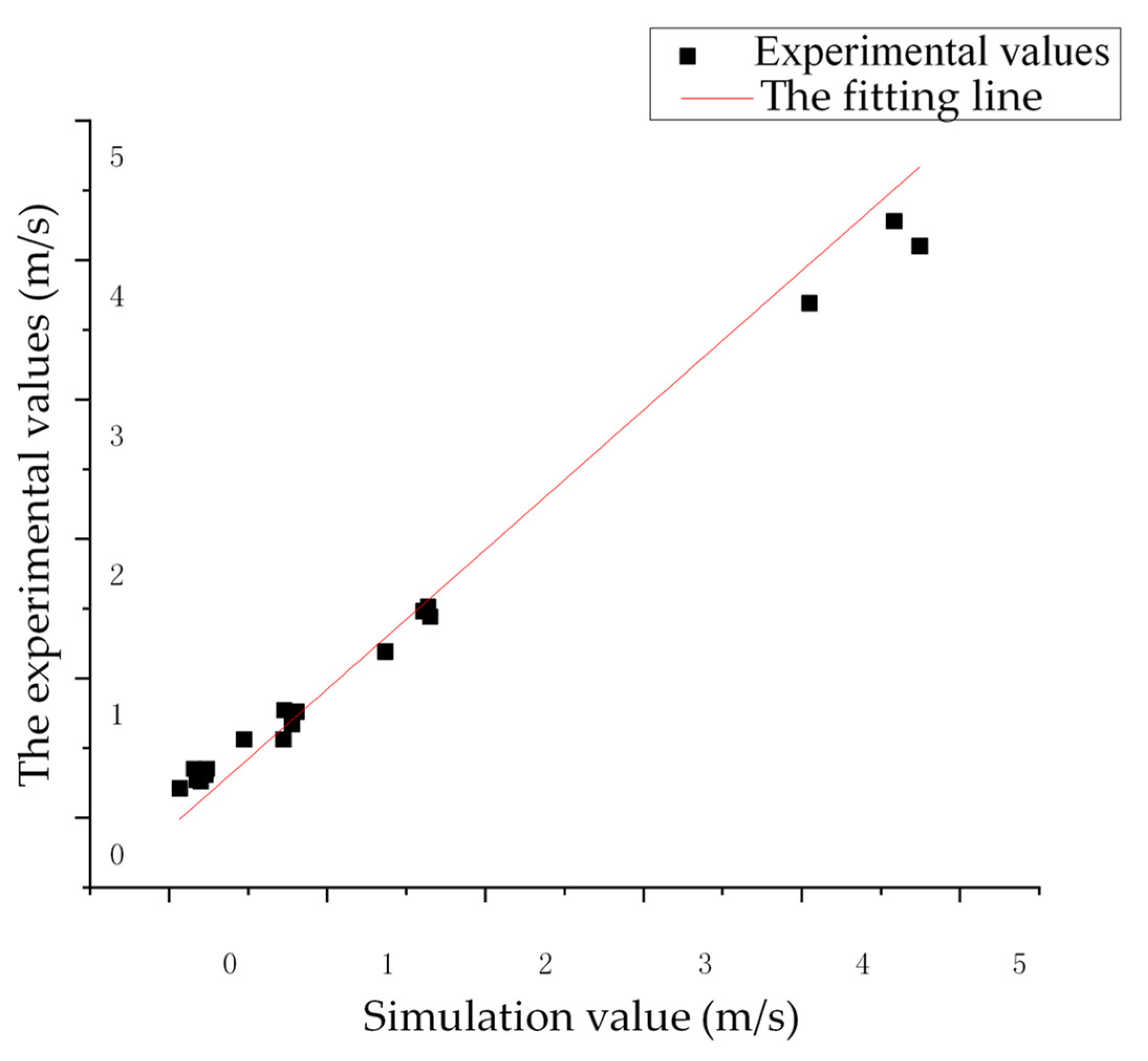
4. Test Validation
5. Conclusions
6. Limitations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qin, W.; Xue, X.; Zhang, S.; Gu, W.; Wang, B. Droplet deposition and efficiency of fungicides sprayed with small UAV against wheat powdery mildew. Int. J. Agric. Biol. Eng. 2018, 11, 27–32. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, F.; Qiu, B.; Dong, X.; Ma, J.; Huang, X.; Ahmed, S.; Chandio, F.A. Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Comput. Electron. Agric. 2020, 172, 105350. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote. Sens. 2019, 11, 1443. [Google Scholar] [CrossRef] [Green Version]
- Urita, A. Aerodynamic Characteristics of Elastic Wings Morphed and Vibrated in Uniform Flows and Separated Flows Around Them. Flow Turbul. Combust. 2018, 102, 457–467. [Google Scholar] [CrossRef]
- Ren, Z.; Fu, W.; Yan, J. Gust Perturbation Alleviation Control of Small Unmanned Aerial Vehicle Based on Pressure Sensor. Int. J. Aerosp. Eng. 2018, 2018, 7259363. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.; Shen, A.; Wang, M.; Peng, S.; Liu, Z. Study on Composing Dense Formations in a Dynamic Environment of Multirotor UAVs by Distributed Control. Math. Probl. Eng. 2018, 2018, 7878094. [Google Scholar] [CrossRef]
- Brinkman, L.J.; Davis, B.; Johnson, E.C. Post-movement stabilization time for the downwash region of a 6-rotor UAV for remote gas monitoring. Heliyon 2020, 6, e04994. [Google Scholar] [CrossRef] [PubMed]
- Tang, Q.; Zhang, R.; Chen, L.; Xu, G.; Deng, W.; Ding, C.; Xu, M.; Yi, T.; Wen, Y.; Li, L. High-accuracy, high-resolution downwash flow field measurements of an unmanned helicopter for precision agriculture. Comput. Electron. Agric. 2020, 173, 105390. [Google Scholar] [CrossRef]
- Wang, C.; He, X.; Wang, X.; Wang, Z.; Wang, S.; Li, L.; Mei, S. Distribution characteristics of pesticide application droplets deposition of unmanned aerial vehicle based on testing method of deposition quality balance. Trans. Chin. Soc. Agric. Eng. 2016, 32, 89–97. [Google Scholar]
- Ni, J.; Yao, L.; Zhang, J.; Cao, W.; Zhu, Y.; Tai, X. Development of an unmanned aerial vehicle-borne crop-growth monitoring system. Sensors 2017, 17, 502. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, H.; Qi, L.; Wu, Y.; Musiu, E.M.; Cheng, Z.; Wang, P. Numerical simulation of airflow field from a six–rotor plant protection drone using lattice Boltzmann method. Biosyst. Eng. 2020, 197, 336–351. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Z.; Lan, Y.; Hu, L.; Zang, Y.; Liu, A.; Zhang, T. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation. Trans. Chin. Soc. Agric. Eng. 2015, 31, 77–86. [Google Scholar]
- Wang, C.; He, X.; Wang, X.; Wang, Z.; Pan, H.; He, Z. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2016, 32, 54–61. [Google Scholar] [CrossRef] [Green Version]
- Guo, Q.; Zhu, Y.; Tang, Y.; Hou, C.; He, Y.; Zhuang, J.; Luo, S. CFD simulation and experimental verification of the spatial and temporal distributions of the downwash airflow of a quad-rotor agricultural UAV in hover. Comput. Electron. Agric. 2020, 172, 105343. [Google Scholar] [CrossRef]
- Li, J.; Shi, Y.; Lan, Y.; Guo, S. Vertical distribution and vortex structure of rotor wind field under the influence of rice canopy. Comput. Electron. Agric. 2019, 159, 140–146. [Google Scholar] [CrossRef]
- Shi, Q.; Liu, D.; Mao, H.; Shen, B.; Li, M. Wind-induced response of rice under the action of the downwash flow field of a multi-rotor UAV. Biosyst. Eng. 2021, 203, 60–69. [Google Scholar] [CrossRef]
- Cheng, X. Construction and Prediction of CFD Model for Spatial and Temporal Distribution of Greenhouse Environmental Factors. Ph.D. Thesis, Jiangsu University, Jiangsu, China, 2011; pp. 116–117. [Google Scholar]
- Molina-Aiz, F.; Valera, D.; Peña, A.; Gil, J.; López, A. A study of natural ventilation in an Almería-type greenhouse with insect screens by means of tri-sonic anemometry. Biosyst. Eng. 2009, 104, 224–242. [Google Scholar] [CrossRef]
- Espinoza, K.; López, A.; Valera, D.L.; Molina-Aiz, F.D.; Torres, J.A.; Pena, A. Effects of ventilator configuration on the flow pattern of a naturally-ventilated three-span Mediterranean greenhouse. Biosyst. Eng. 2017, 164, 13–30. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter |
|---|---|
| Aircraft size | 430 mm × 430 mm × 250 mm |
| Axial distance of symmetrical motor | 360 mm |
| Power motor | 2213–920 KV |
| Rotor | 8045 |
| Span | Eaves Height | Roof Height | Length | Number of Ridges |
|---|---|---|---|---|
| 3.2 m | 3.8 m | 4.4 m | 20 m | 4 |
| CCW-1 | CCW-2 | CW-1 | CW-2 |
|---|---|---|---|
| 94,896 | 95,044 | 94,952 | 94,902 |
| Test Number | Crop Conditions | Flight Height (m) | Inter-Row Position (m) |
|---|---|---|---|
| 1 | No | 1.5 | 0 |
| 2 | Have | 1.1 | 0 |
| 3 | Have | 1.5 | 0 |
| 4 | Have | 1.9 | 0 |
| 5 | Have | 1.5 | 4 |
| 6 | Have | 1.5 | 8 |
| 7 | Have | 1.5 | 9 |
| Height (m) | Distance from Midline (m) | Value of Simulation (m/s) | Experimental Value (m) | Relative Error |
|---|---|---|---|---|
| 0.3 | 0 | 4.05 | 3.69 | 0.088 |
| 1 | 0.73 | 0.77 | 0.059 | |
| 2 | 1.37 | 1.19 | 0.131 | |
| 3 | 1.65 | 1.44 | 0.129 | |
| 4 | 1.64 | 1.51 | 0.079 | |
| 0.6 | 0 | 4.75 | 4.10 | 0.136 |
| 1 | 0.16 | 0.35 | 1.215 | |
| 2 | 0.48 | 0.56 | 0.181 | |
| 3 | 0.78 | 0.67 | 0.139 | |
| 4 | 0.801 | 0.76 | 0.193 | |
| 0.9 | 0 | 4.59 | 4.28 | 0.067 |
| 1 | 0.17 | 0.27 | 0.552 | |
| 2 | 0.07 | 0.21 | 2.088 | |
| 3 | 0.20 | 0.26 | 0.800 | |
| 4 | 0.24 | 0.35 | 0.561 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Q.; Pan, Y.; He, B.; Zhu, H.; Liu, D.; Shen, B.; Mao, H. The Airflow Field Characteristics of UAV Flight in a Greenhouse. Agriculture 2021, 11, 634. https://doi.org/10.3390/agriculture11070634
Shi Q, Pan Y, He B, Zhu H, Liu D, Shen B, Mao H. The Airflow Field Characteristics of UAV Flight in a Greenhouse. Agriculture. 2021; 11(7):634. https://doi.org/10.3390/agriculture11070634
Chicago/Turabian StyleShi, Qiang, Yulei Pan, Beibei He, Huaiqun Zhu, Da Liu, Baoguo Shen, and Hanping Mao. 2021. "The Airflow Field Characteristics of UAV Flight in a Greenhouse" Agriculture 11, no. 7: 634. https://doi.org/10.3390/agriculture11070634
APA StyleShi, Q., Pan, Y., He, B., Zhu, H., Liu, D., Shen, B., & Mao, H. (2021). The Airflow Field Characteristics of UAV Flight in a Greenhouse. Agriculture, 11(7), 634. https://doi.org/10.3390/agriculture11070634