Numerical Simulation and Analysis of Fish-Like Robots Swarm


Abstract
1. Introduction
- Efficiency savings are simulated by changing the formation of the fish-like robots swarm and the spacing between fishes. The results show that the efficiency of the tandem swarm is high at close spacing, and the efficiency of the rectangle swarm is high at large spacing.
- Set the hydro-environment to a low Re number [30] and simple geometry boundary condition, which is closer to the gentle aquatic environment. Set four kinds of fish-like robots swarms: the tandem, the phalanx, the diamond and the rectangle, and the spacing between fishes is changed to test the thrust coefficient, the lateral power loss coefficient and the Froude efficiency of fishes
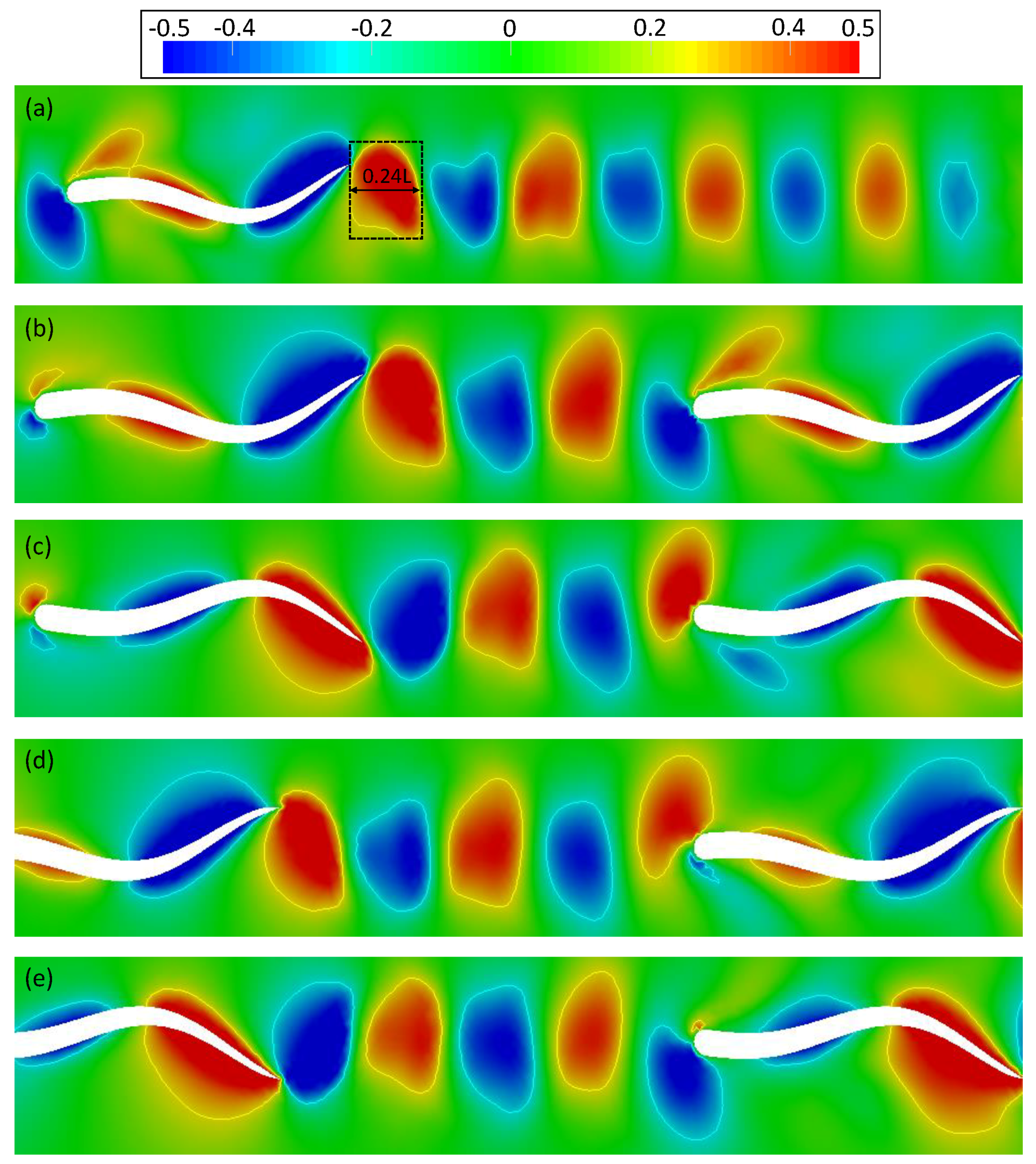
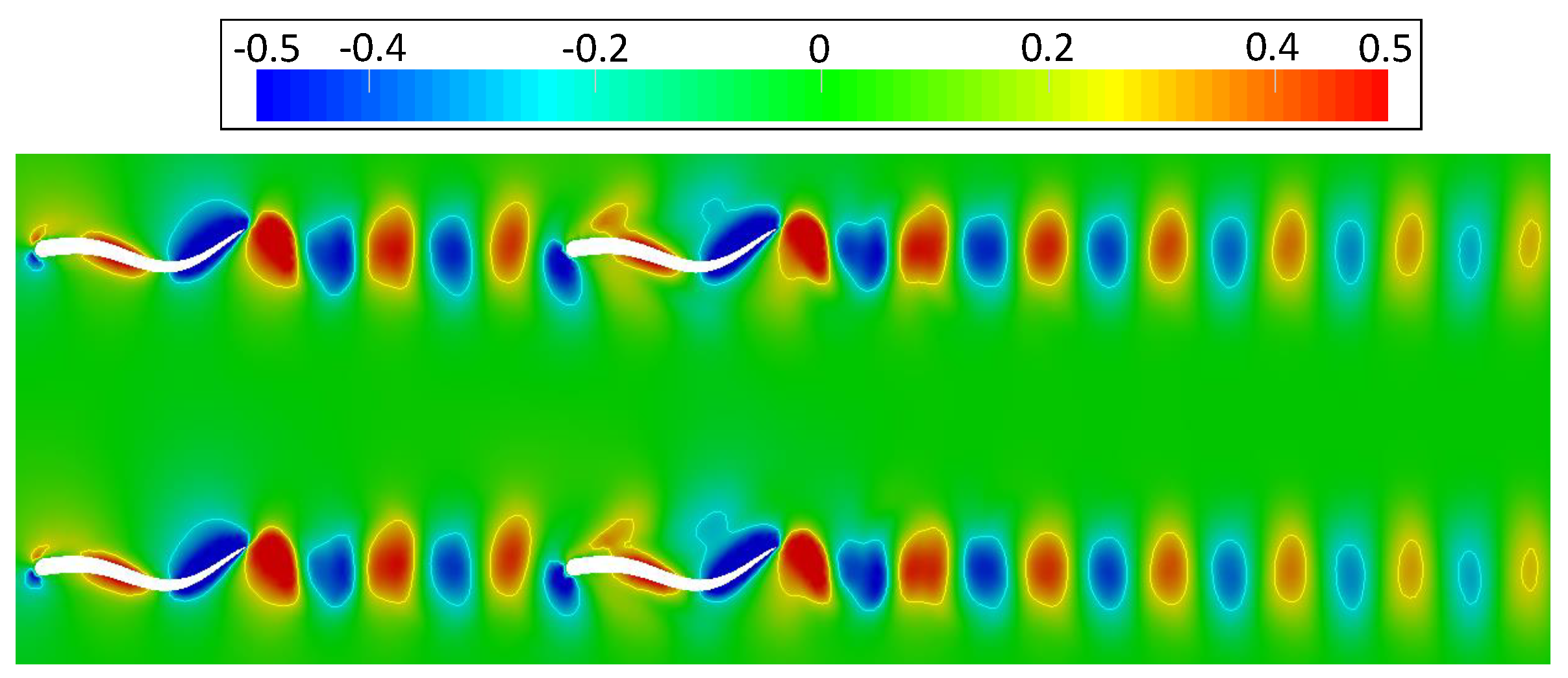
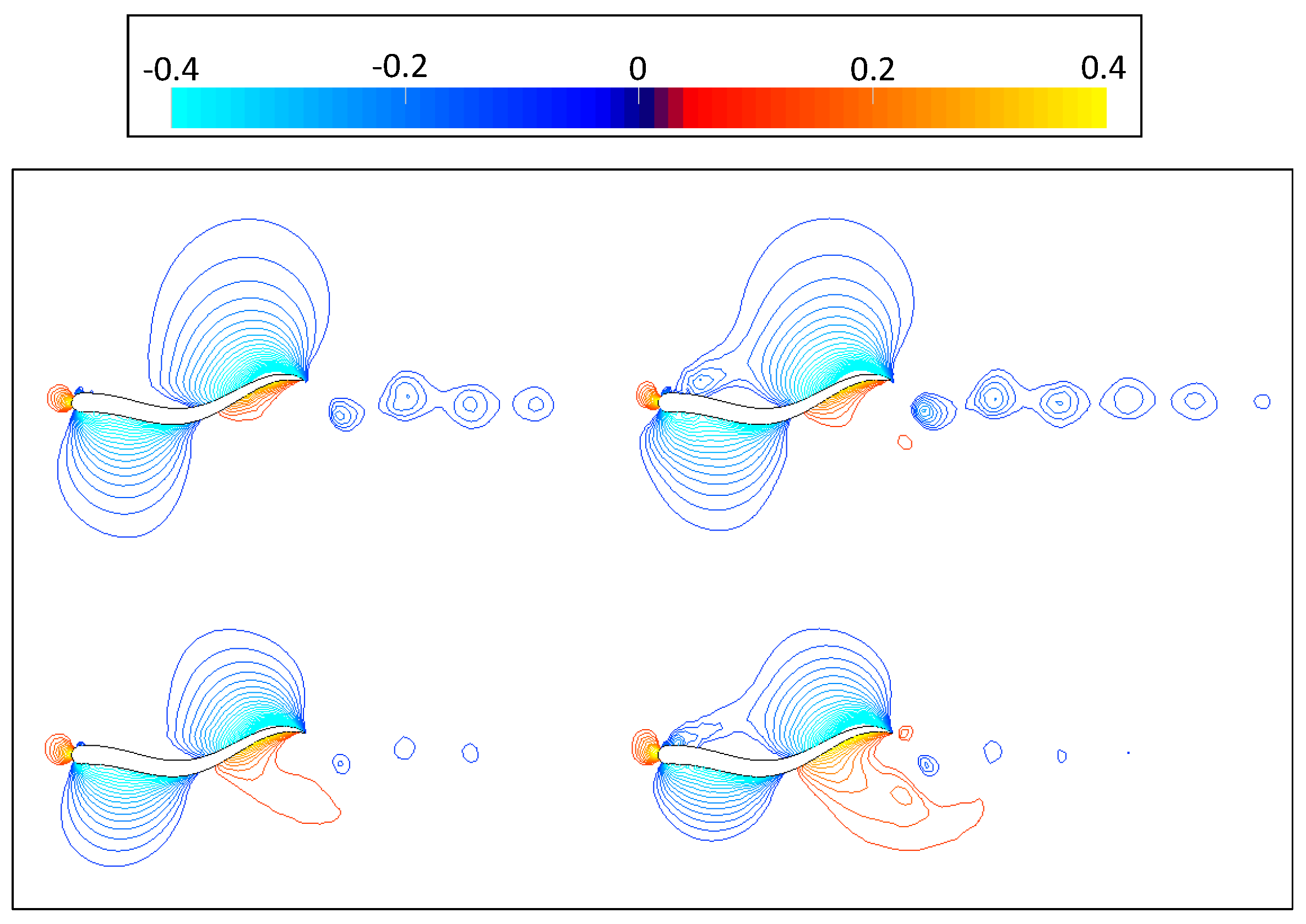
- Discuss the influence of the wake [25,31] and the pressure field generated by the fish-like robot tail swing on the Froude efficiency, and analyze the effect of fish-like robot spacing on swarm performance. The influence of the wake especially the direction and size on tandem swarm is analyzed detailedly, and the results of other formations are consistent with it. The findings will provide significant guidance for the control of fish-like robots swarm.
2. Computational Methods
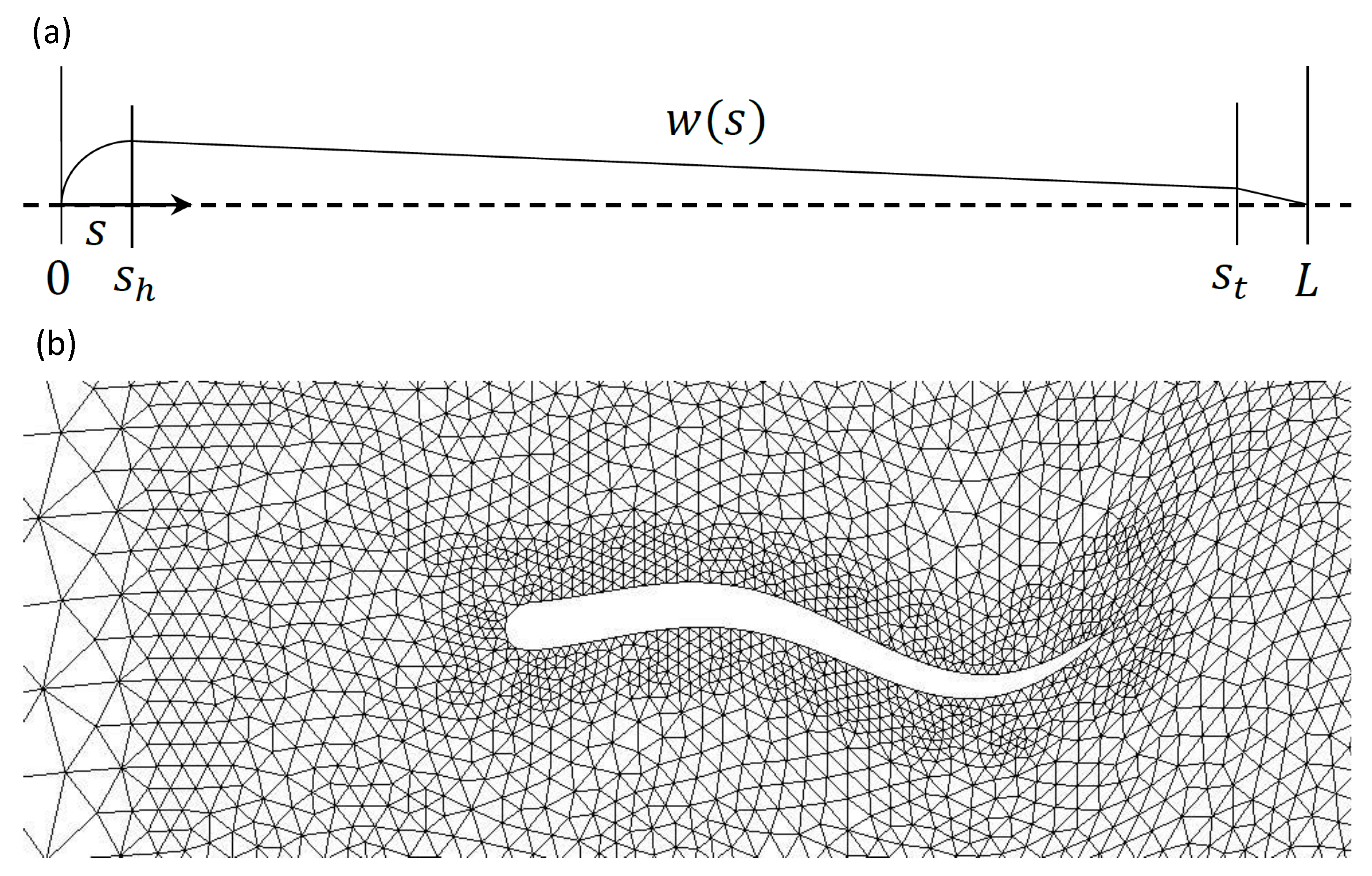
2.1. Geometrical Model and Kinematic Model
2.2. Numerical Method
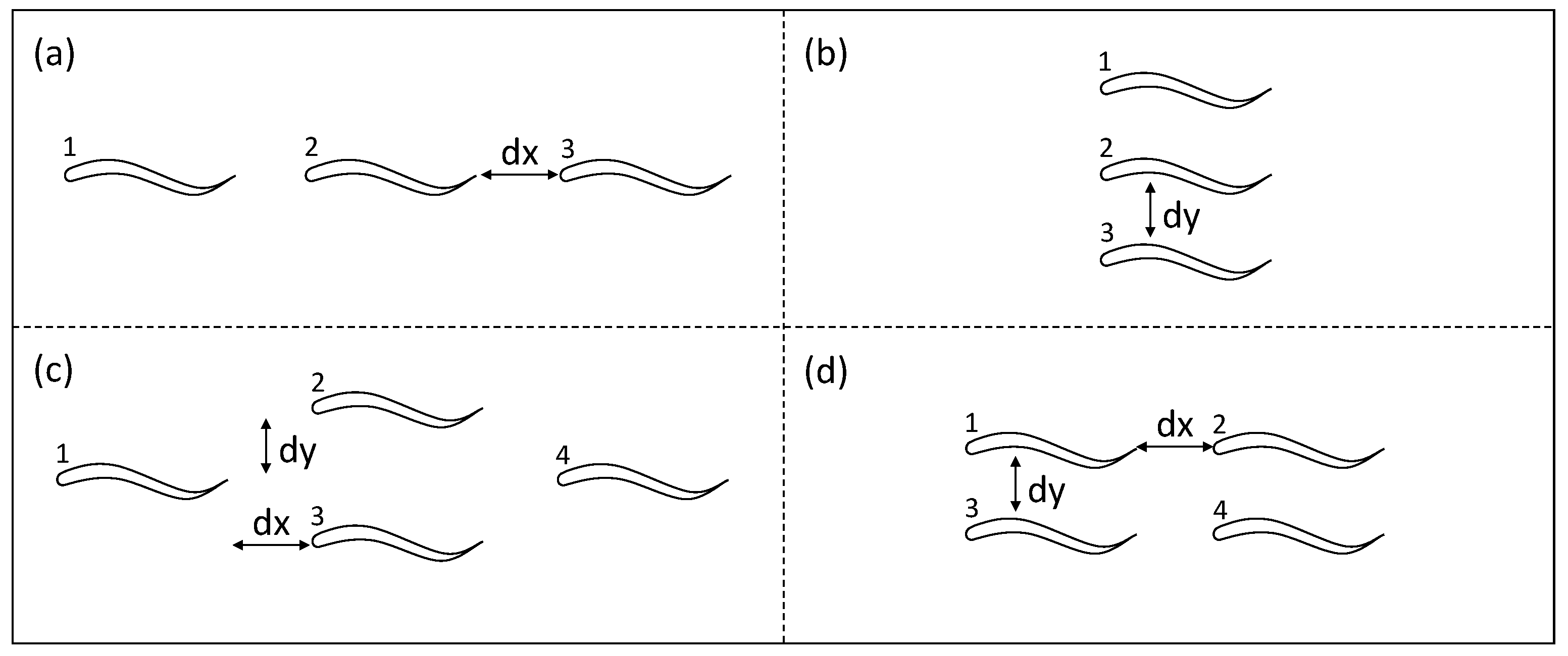
2.3. Swarm Configurations
2.4. Performance Measurements
3. Results and Discussion
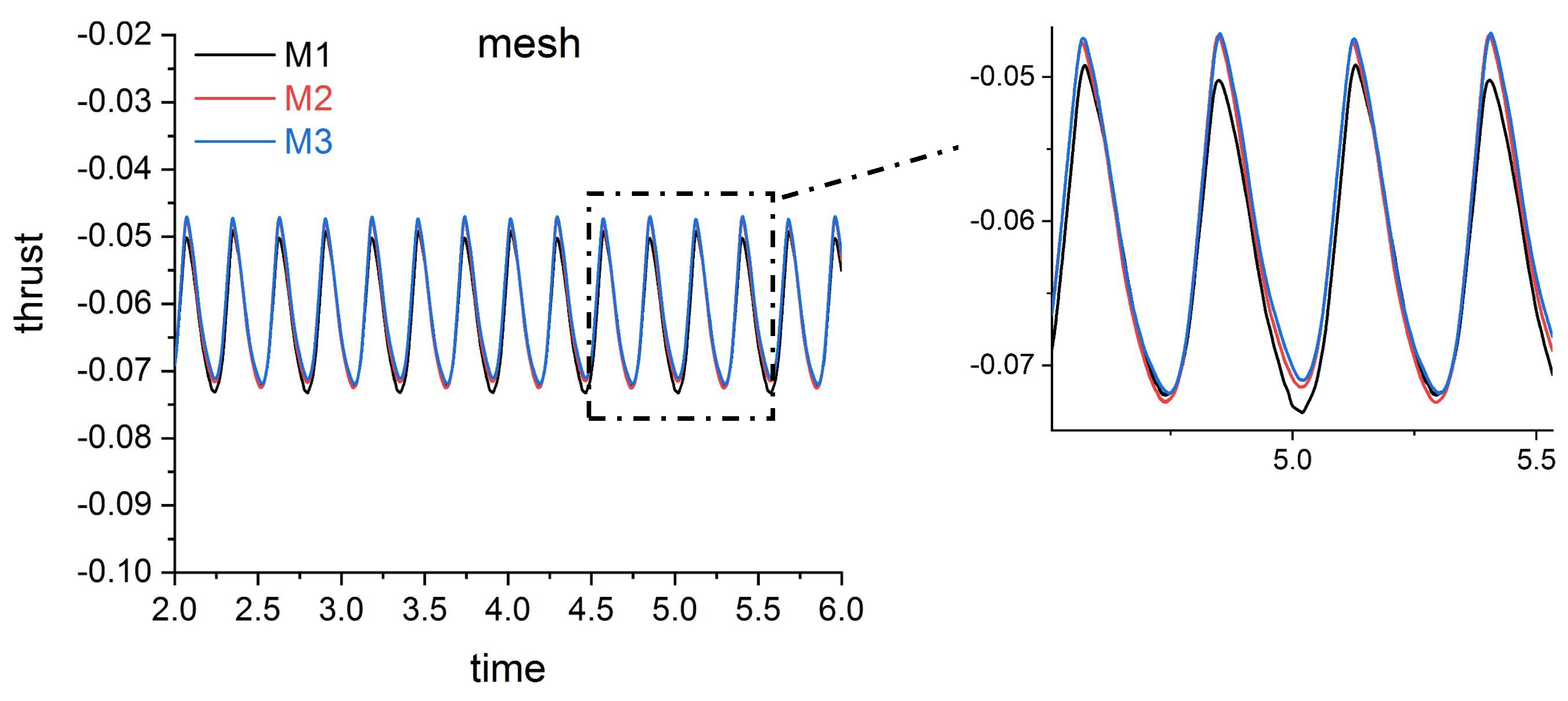
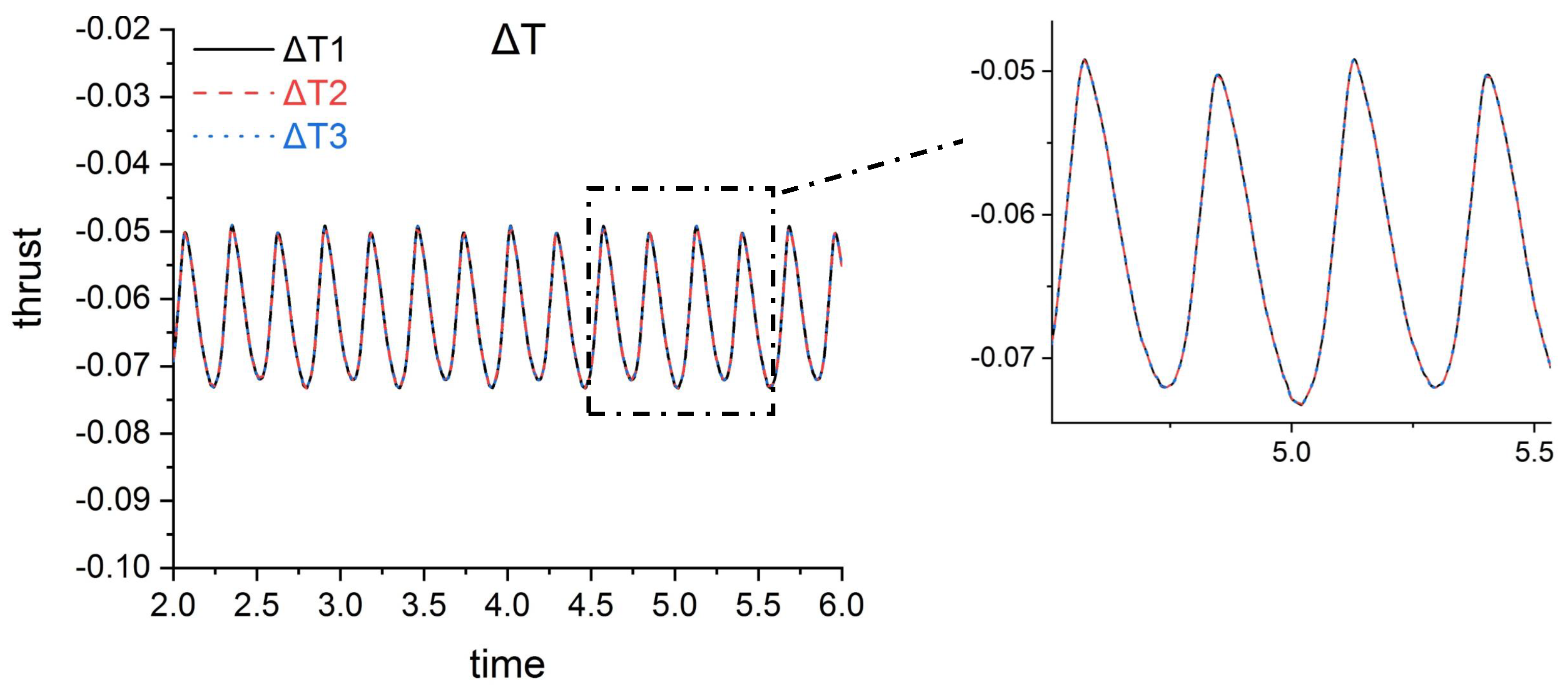
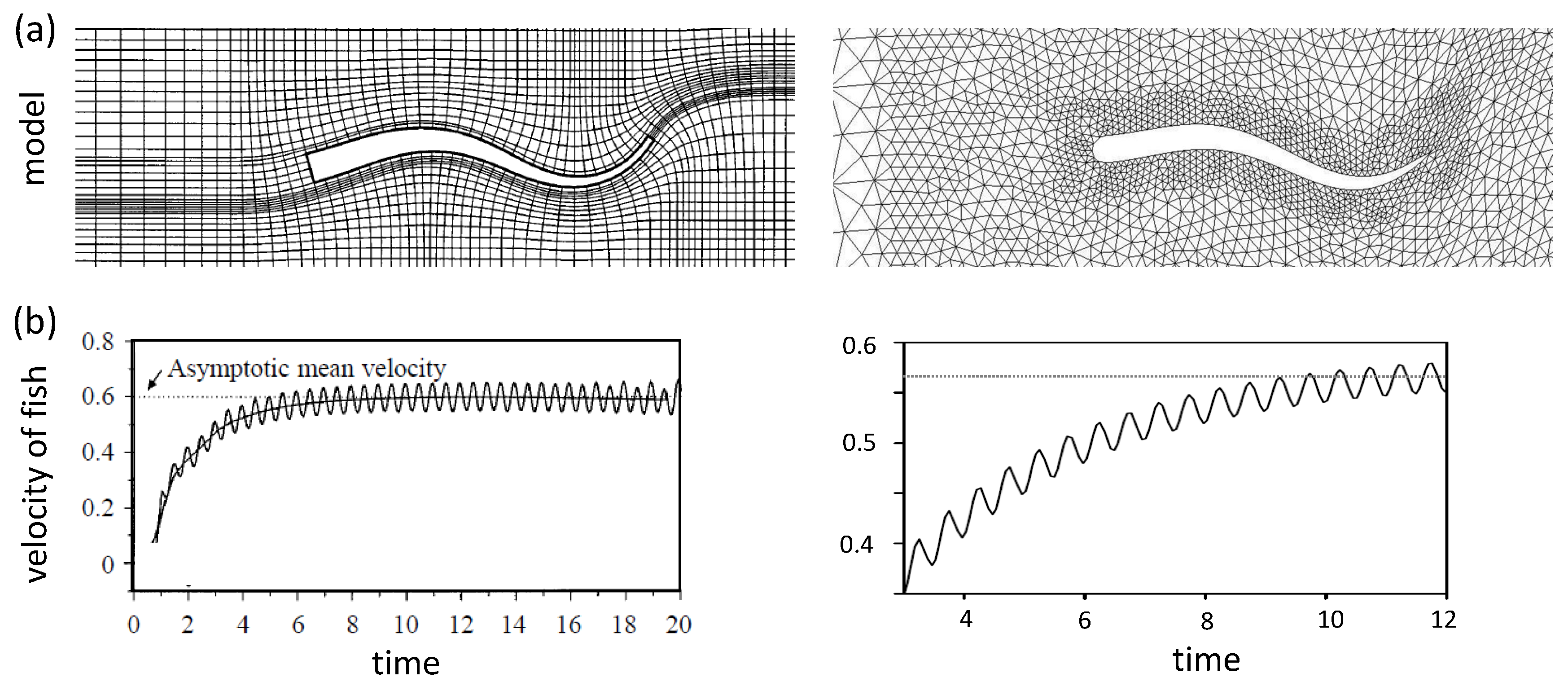
3.1. Correctness Validation
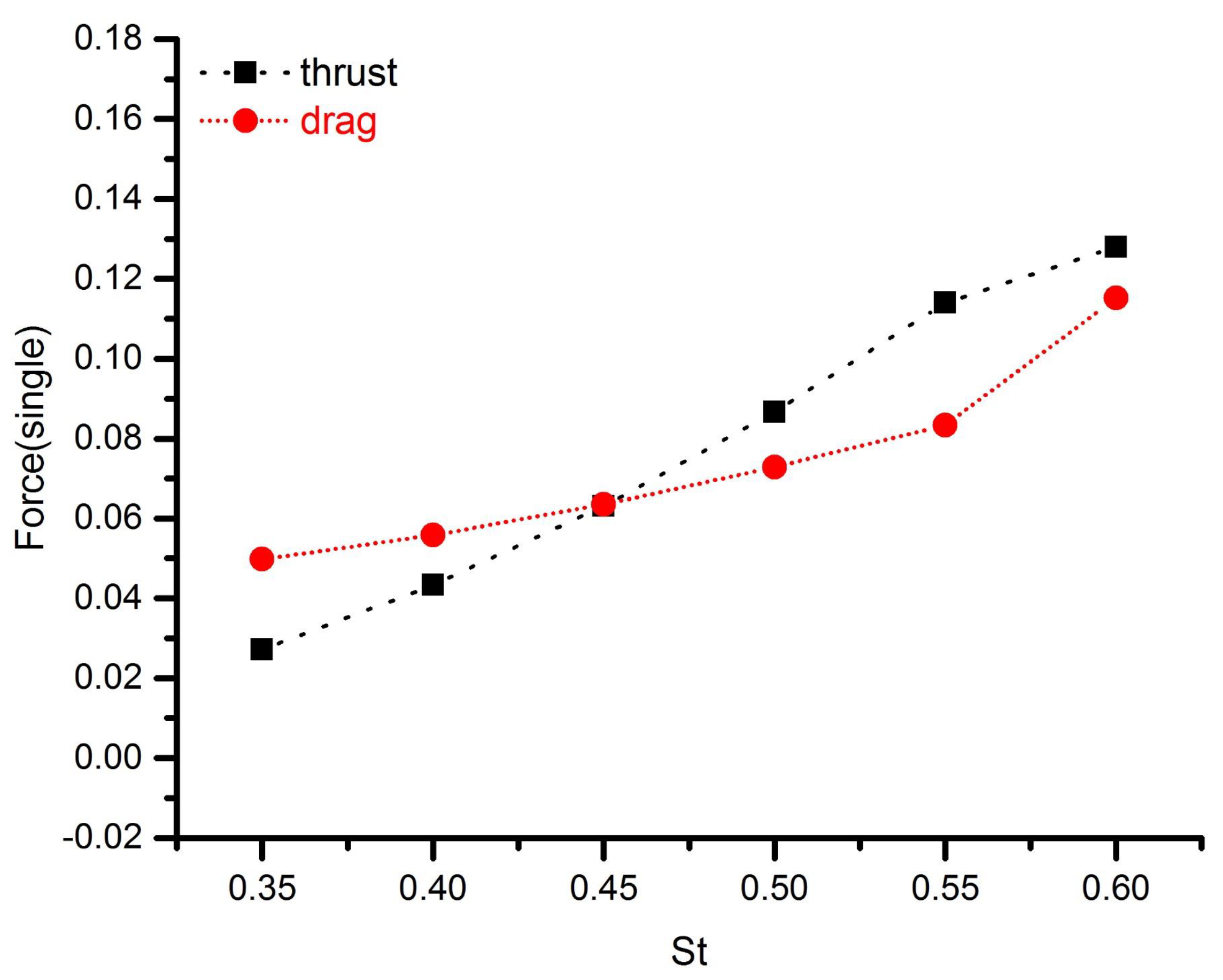
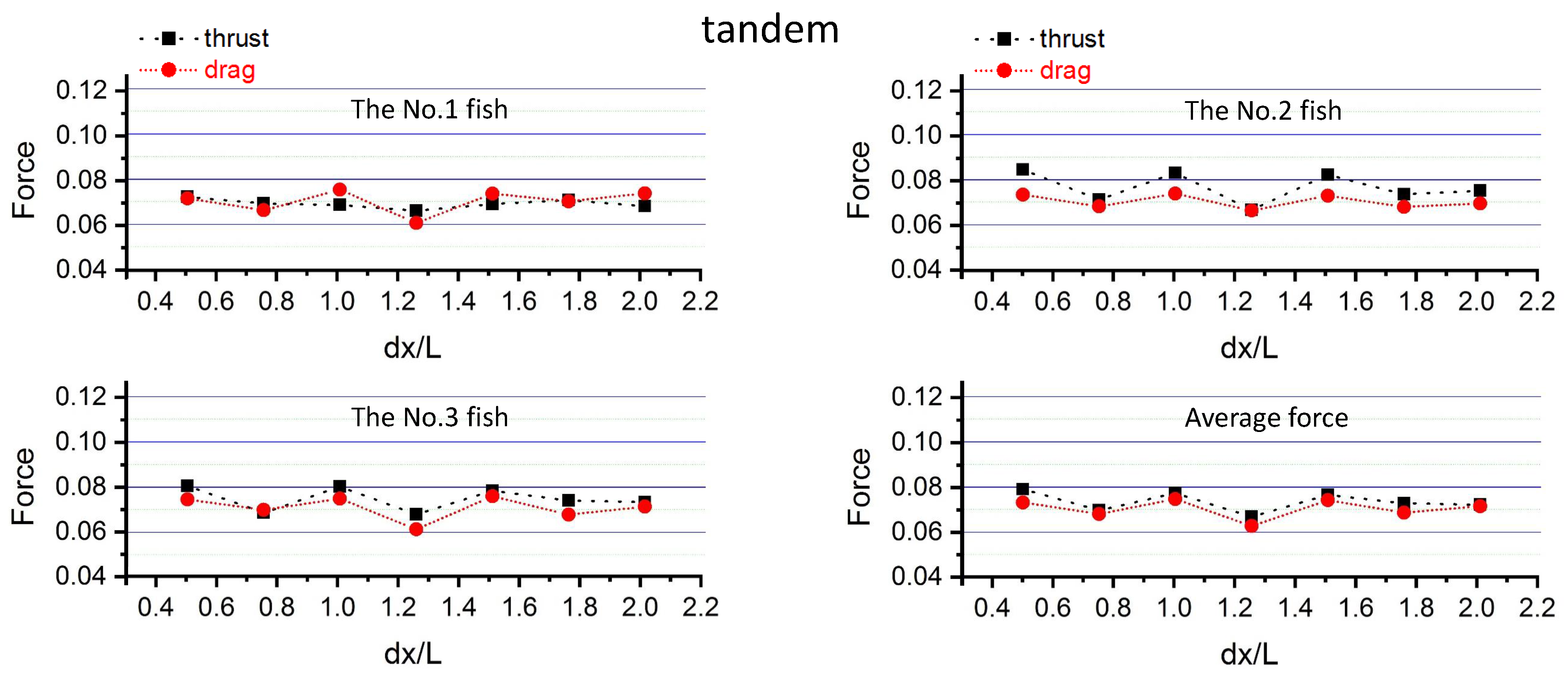
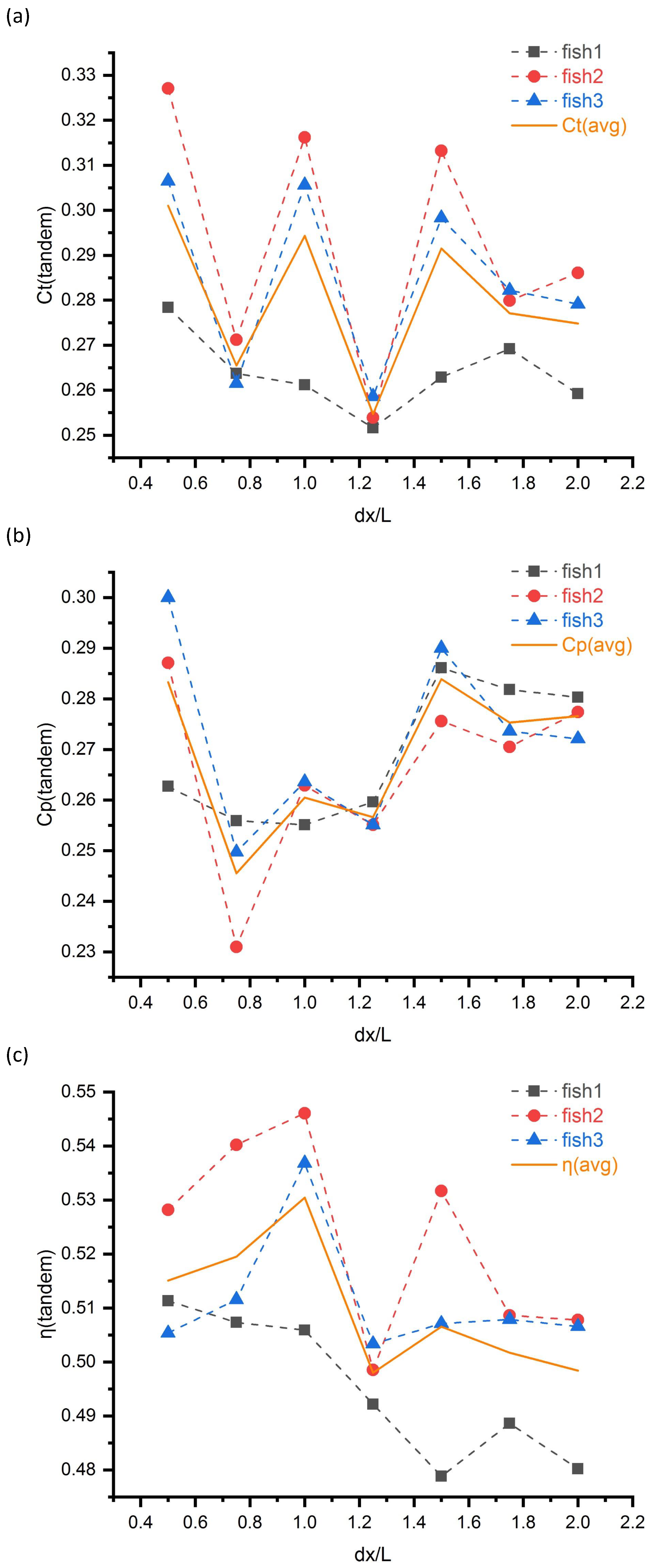
3.2. The Tandem Swarm
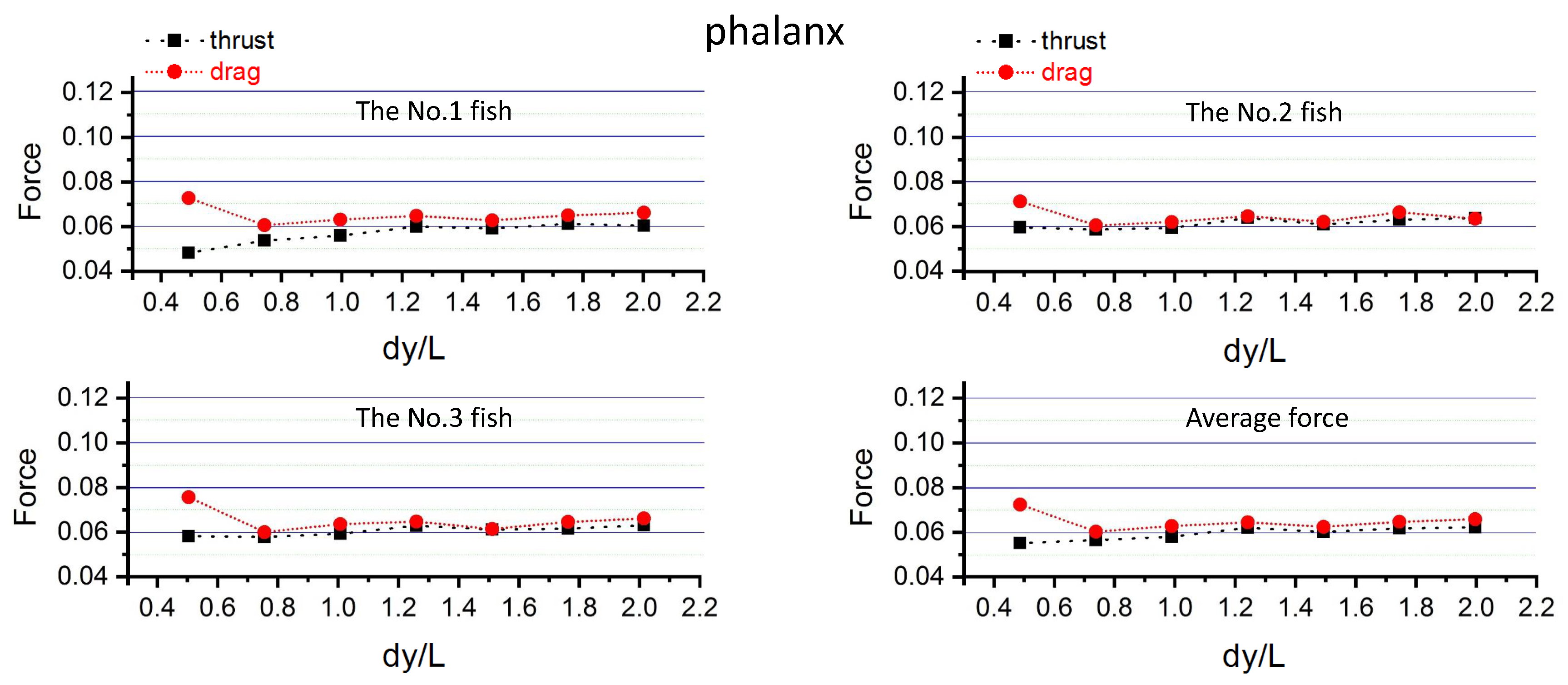
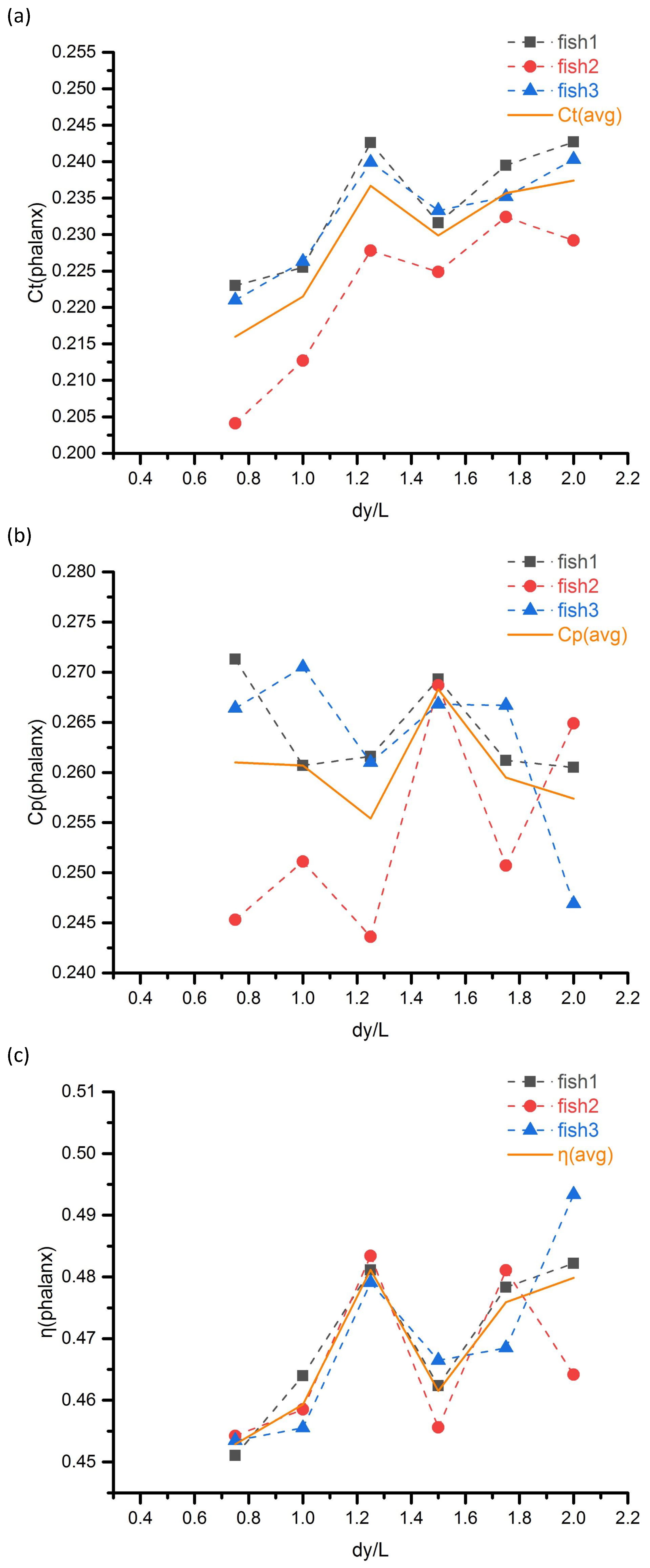
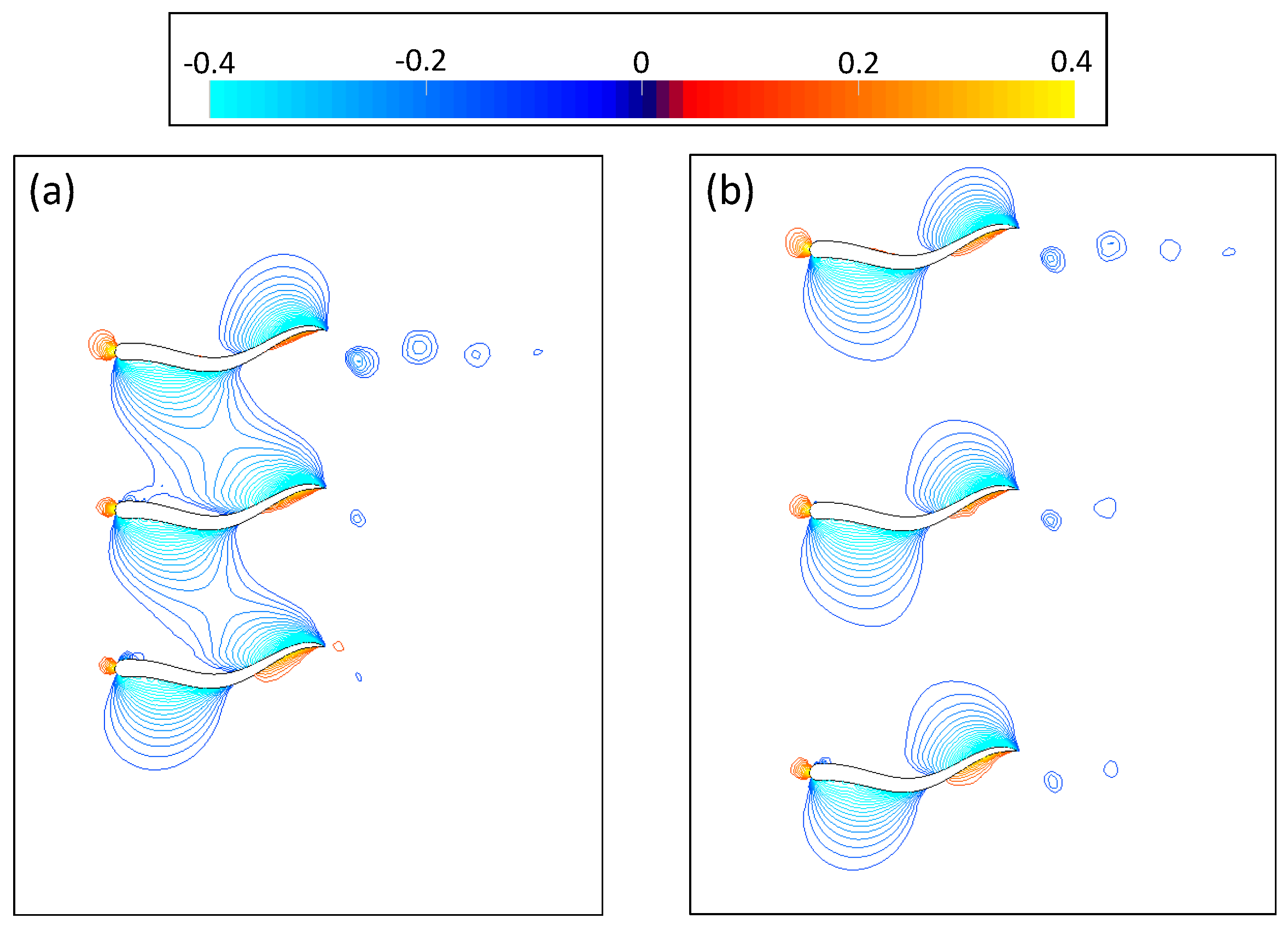
3.3. The Phalanx Swarm
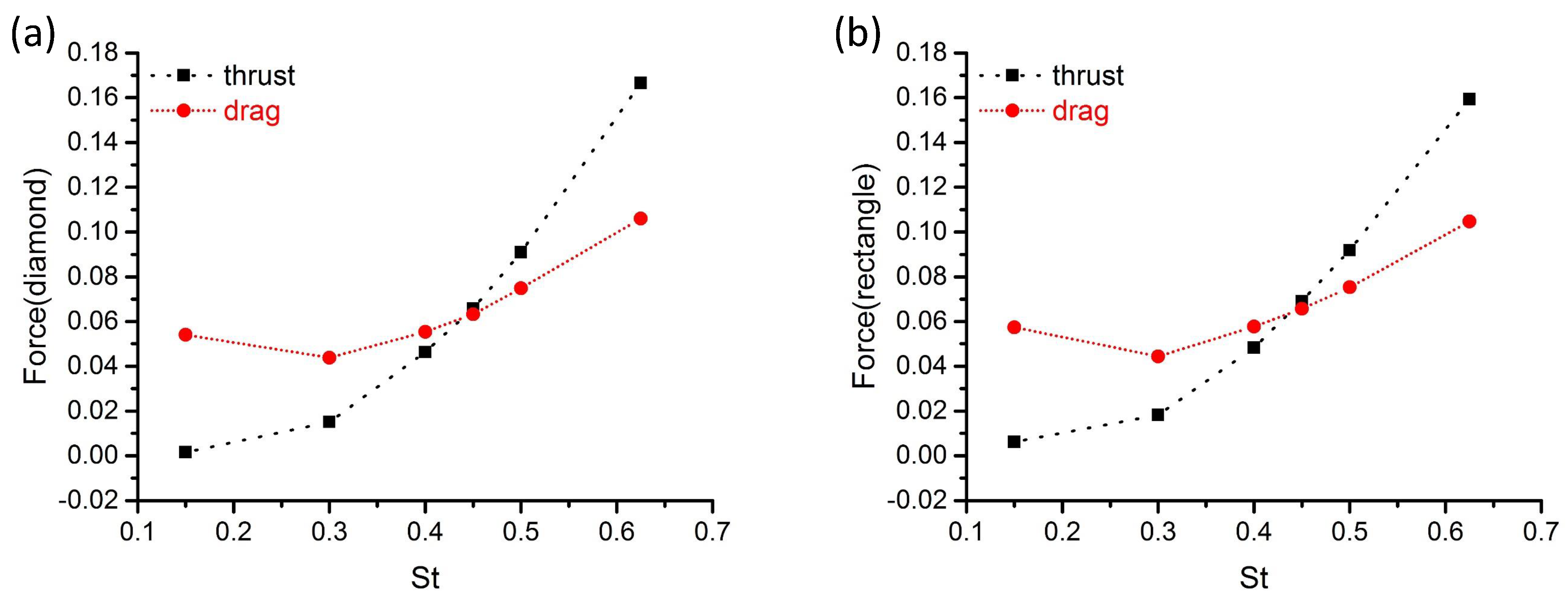
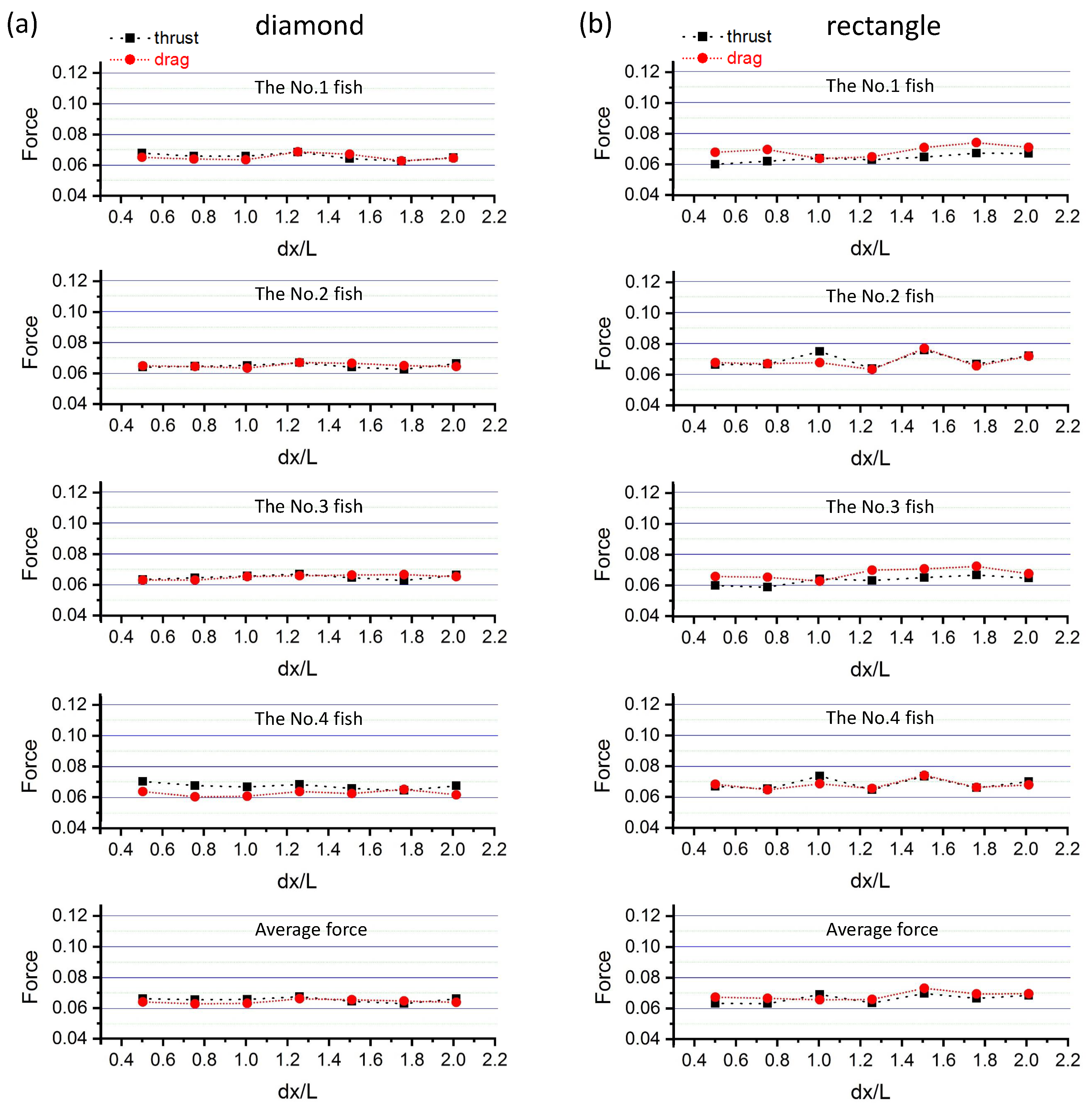
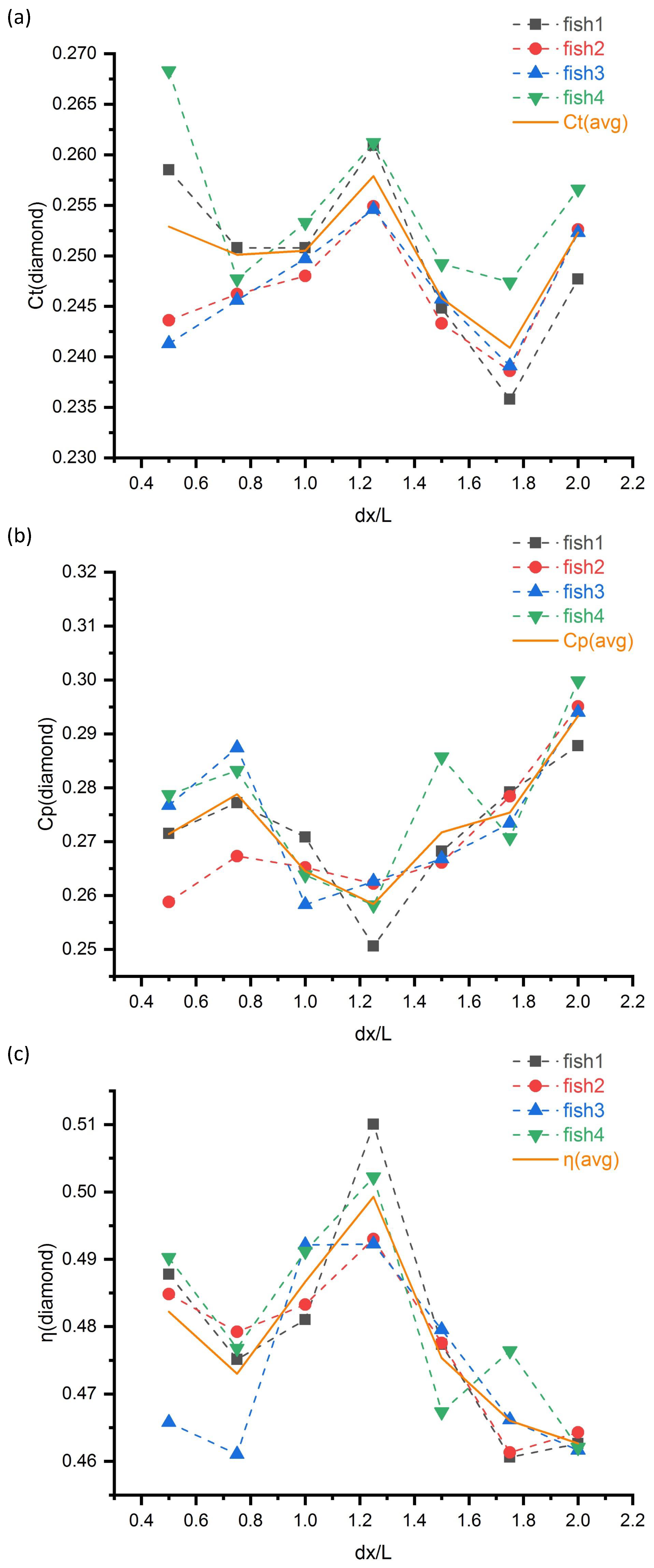
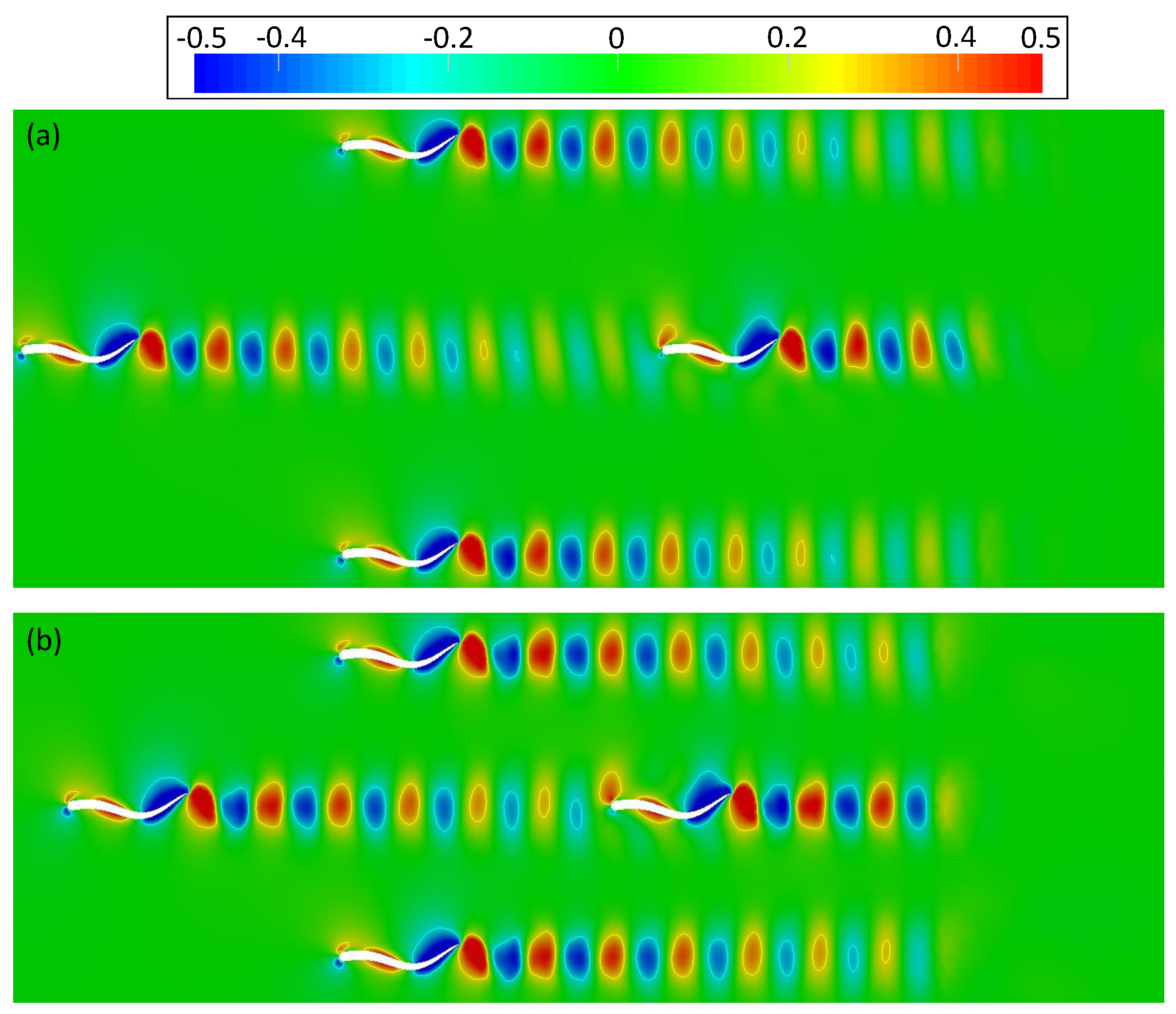
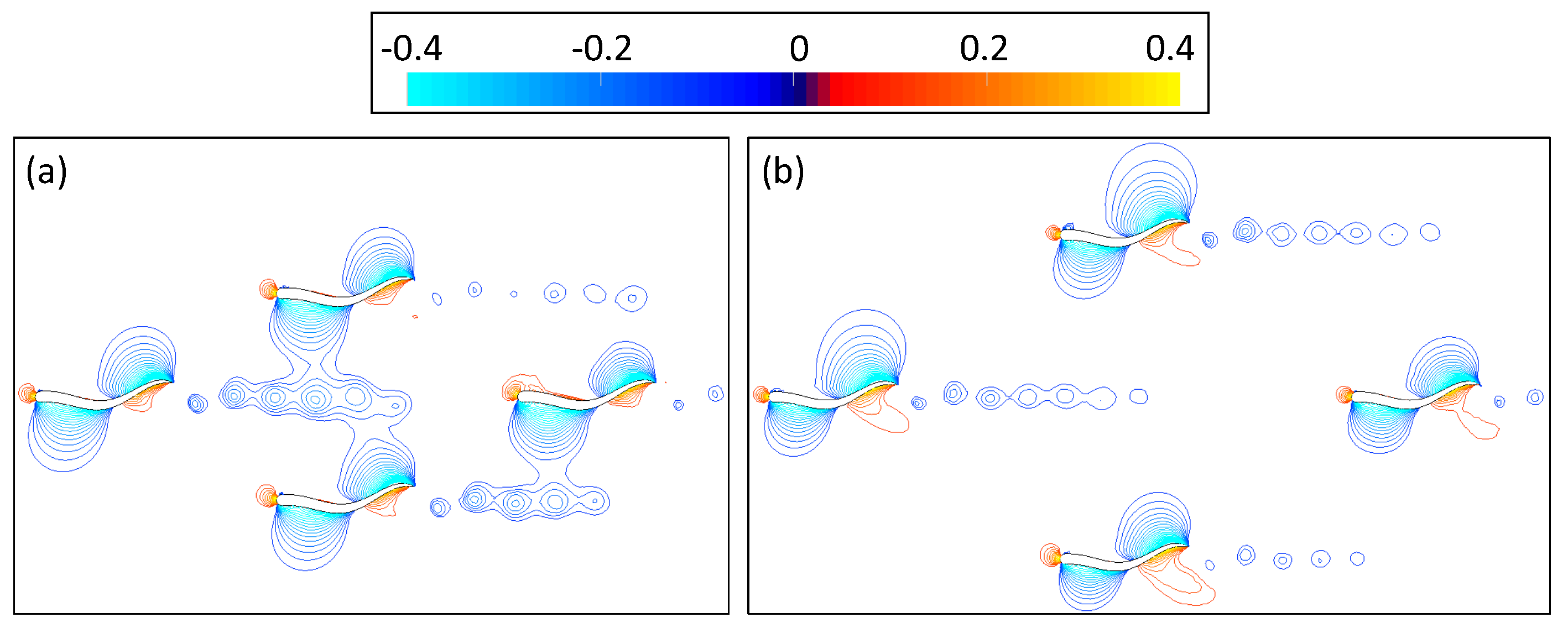
3.4. The Diamond Swarm
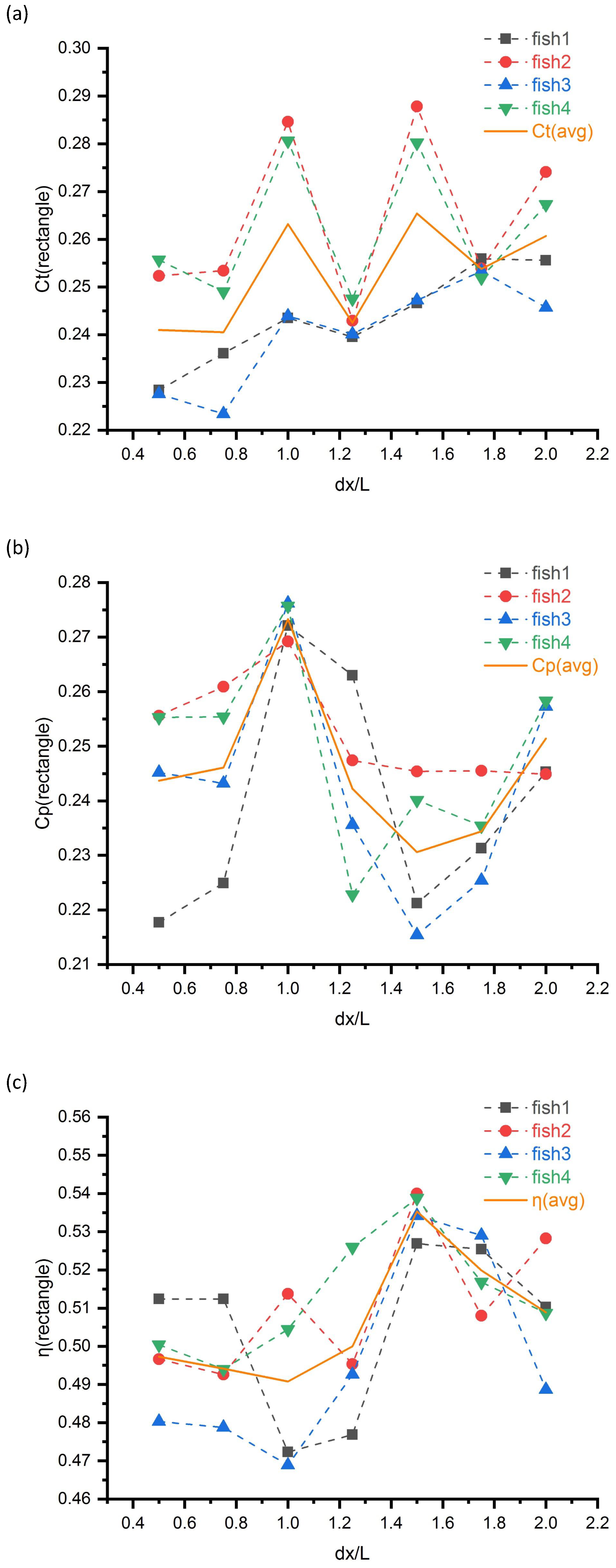
3.5. The Rectangle Swarm
3.6. Comparison between Different Shapes
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Abukhalil, T.; Patil, M.; Sobh, T. A comprehensive survey on decentralized modular swarm robotic systems and deployment environments. Int. J. Eng. (IJE) 2013, 7, 44–60. [Google Scholar]
- Caglioti, V.; Citterio, A.; Fossati, A. Cooperative, distributed localization in multi-robot systems: A minimum-entropy approach. In Proceedings of the IEEE Workshop on Distributed Intelligent Systems: Collective Intelligence and Its Applications, Prague, Czech Republic, 15–16 June 2006; pp. 25–30. [Google Scholar]
- Fox, D.; Burgard, W.; Kruppa, H.; Thrun, S. A probabilistic approach to collaborative multi-robot localization. Auton. Robot. 2000, 8, 325–344. [Google Scholar] [CrossRef]
- Baglietto, M.; Paolucci, M.; Scardovi, L.; Zoppoli, R. Information-based multi-agent exploration. In Proceedings of the Third International Workshop on Robot Motion and Control, Bukowy Dworek, Poland, 11 November 2002; pp. 173–179. [Google Scholar]
- Treaty, N.A. Multi-Robot Systems in Military Domains; NATO Research and Technology Organisation: Neuilly-sur-Seine, France, 2008. [Google Scholar]
- Stroupe, A.; Huntsberger, T.; Okon, A.; Aghazarian, H.; Robinson, M. Behavior-based multi-robot collaboration for autonomous construction tasks. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2005), Edmonton, AB, Canada, 2–6 August 2005; pp. 1495–1500. [Google Scholar]
- Patil, M.D.; Abukhalil, T. Design and implementation of heterogeneous robot swarm. In Proceedings of the ASEE 2014 Zone I Conference, University of Bridgeport, Bridgpeort, CT, USA, 3–5 April 2014; pp. 3–5. [Google Scholar]
- Patil, M.; Abukhalil, T.; Patel, S.; Sobh, T. UB robot swarm—Design, implementation, and power management. In Proceedings of the 2016 12th IEEE International Conference on Control and Automation (ICCA), Kathmandu, Nepal, 1–3 June 2016; pp. 577–582. [Google Scholar]
- Patil, M.; Abukhalil, T.; Sobh, T. Hardware Architecture Review of Swarm Robotics System: Self-Reconfigurability, Self-Reassembly, and Self-Replication. ISRN Robot. 2013, 2013, 849606. [Google Scholar] [CrossRef]
- Patil, M.; Abukhalil, T.; Patel, S.; Sobh, T. UB Swarm: Hardware implementation of heterogeneous swarm robot with fault detection and power management. Int. J. Comput. 2016, 15, 162–176. [Google Scholar]
- Abukhalil, T.Y.; Patil, M.; Sobh, T.M. UBSwarm: Design of a Software Environment to Deploy Multiple Decentralized Robots. In Proceedings of the 2014 Zone 1 Conference of the American Society for Engineering Education, Bridgeport, CT, USA, 3–5 April 2014. [Google Scholar]
- Balch, T.; Arkin, R.C. Behavior-based formation control for multirobot teams. IEEE Trans. Robot. Autom. 1998, 14, 926–939. [Google Scholar] [CrossRef]
- Fax, J.A.; Murray, R.M. Information flow and cooperative control of vehicle formations. IEEE Trans. Autom. Control 2004, 49, 1465–1476. [Google Scholar] [CrossRef]
- Ji, X.; Wu, S.; Liu, X.; Du, Y.; Tang, J. Research and design on physical multi-UAV system for verification of autonomous formation and cooperative guidance. In Proceedings of the 2010 International Conference on Electrical and Control Engineering (ICECE), Wuhan, China, 25–27 June 2010; pp. 1570–1576. [Google Scholar]
- De Silva, D. Formation Control for Unmanned Aerial Vehicles. Master’s thesis, Instituto Superior Tecnico (IST), Lisboa, Portugal, 2012. [Google Scholar]
- Shree, A.S.; Singh, V.K.; Solanki, P.B.; Behera, L. Design and Development of Robotic Fish Swarm Based Coast Monitoring System. Proceedings of Conference on Advances In Robotics, Pune, India, 4–6 July 2013; ACM: New York, NY, USA; pp. 1–6. [Google Scholar]
- Takada, Y.; Ochiai, T.; Fukuzaki, N.; Tajiri, T.; Wakisaka, T. Analysis of flow around robotic fish by three-dimensional fluid-structure interaction simulation and evaluation of propulsive performance. J. Aero Aqua Bio-Mech. 2013, 3, 57–64. [Google Scholar] [CrossRef]
- van Rees, W.M.; Gazzola, M.; Koumoutsakos, P. Optimal shapes for anguilliform swimmers at intermediate Reynolds numbers. J. Fluid Mech. 2013, 722, R3. [Google Scholar] [CrossRef]
- Van Rees, W.M.; Gazzola, M.; Koumoutsakos, P. Optimal morphokinematics for undulatory swimmers at intermediate Reynolds numbers. J. Fluid Mech. 2015, 775, 178–188. [Google Scholar]
- Stefanini, C.; Orofino, S.; Manfredi, L.; Mintchev, S.; Marrazza, S.; Assaf, T.; Capantini, L.; Sinibaldi, E.; Grillner, S.; Wallén, P.; et al. A novel autonomous, bioinspired swimming robot developed by neuroscientists and bioengineers. Bioinspiration Biomimetics 2012, 7, 025001. [Google Scholar] [CrossRef]
- Shriyam, S.; Agrawal, A.; Behera, L.; Saxena, A. Robotic fish design and control based on Biomechanics. IFAC Proc. Vol. 2014, 47, 662–669. [Google Scholar] [CrossRef]
- Li, T.; Li, G.; Liang, Y.; Cheng, T.; Dai, J.; Yang, X.; Liu, B.; Zeng, Z.; Huang, Z.; Luo, Y.; et al. Fast-moving soft electronic fish. Sci. Adv. 2017, 3, e1602045. [Google Scholar] [CrossRef] [PubMed]
- Scaradozzi, D.; Palmieri, G.; Costa, D.; Pinelli, A. BCF swimming locomotion for autonomous underwater robots: A review and a novel solution to improve control and efficiency. Ocean Eng. 2017, 130, 437–453. [Google Scholar] [CrossRef]
- Weihs, D. Hydromechanics of fish schooling. Nature 1973, 241, 290–291. [Google Scholar] [CrossRef]
- Novati, G.; Verma, S.; Alexeev, D.; Rossinelli, D.; van Rees, W.M.; Koumoutsakos, P. Synchronisation through learning for two self-propelled swimmers. Bioinspiration Biomimetics 2017, 12, 036001. [Google Scholar] [CrossRef] [PubMed]
- Maertens, A.P.; Gao, A.; Triantafyllou, M.S. Optimal undulatory swimming for a single fish-like body and for a pair of interacting swimmers. J. Fluid Mech. 2017, 813, 301–345. [Google Scholar] [CrossRef]
- Ashraf, I.; Bradshaw, H.; Ha, T.T.; Halloy, J.; Godoy-Diana, R.; Thiria, B. Simple phalanx pattern leads to energy saving in cohesive fish schooling. Proc. Natl. Acad. Sci. USA 2017, 114, 9599–9604. [Google Scholar] [CrossRef]
- Verma, S.; Novati, G.; Koumoutsakos, P. Efficient collective swimming by harnessing vortices through deep reinforcement learning. Proc. Natl. Acad. Sci. USA 2018, 115, 5849–5854. [Google Scholar] [CrossRef] [PubMed]
- Dai, L.; He, G.; Zhang, X.; Zhang, X. Stable formations of self-propelled fish-like swimmers induced by hydrodynamic interactions. J. R. Soc. Interface 2018, 15, 20180490. [Google Scholar] [CrossRef]
- Park, S.G.; Sung, H.J. Hydrodynamics of flexible fins propelled in tandem, diagonal, triangular and diamond configurations. J. Fluid Mech. 2018, 840, 154–189. [Google Scholar] [CrossRef]
- Li, C.; Yang, W.; Xu, X.; Wang, J.; Wang, M.; Xu, L. Numerical investigation of fish exploiting vortices based on the Kármán gaiting model. Ocean Eng. 2017, 140, 7–18. [Google Scholar] [CrossRef]
- Jacobsen, N.G.; Fuhrman, D.R.; Fredsøe, J. A wave generation toolbox for the open-source CFD library: OpenFoam®. Int. J. Numer. Methods Fluids 2012, 70, 1073–1088. [Google Scholar] [CrossRef]
- Chen, Y.; Xue, M.A. Numerical Simulation of Liquid Sloshing with Different Filling Levels Using OpenFOAM and Experimental Validation. Water 2018, 10, 1752. [Google Scholar] [CrossRef]
- Lin, Z.; Yang, W.; Zhou, H.; Xu, X.; Sun, L.; Zhang, Y.; Tang, Y. Communication Optimization for Multiphase Flow Solver in the Library of OpenFOAM. Water 2018, 10, 1461. [Google Scholar] [CrossRef]
- Li, C.; Xu, X.; Wang, J.; Xu, L.; Ye, S.; Yang, X. A parallel multiselection greedy method for the radial basis function–based mesh deformation. Int. J. Numer. Methods Eng. 2018, 113, 1561–1588. [Google Scholar] [CrossRef]
- Zhao, R.; Li, C.; Guo, X.; Fan, S.; Wang, Y.; Yang, C. A Block Iteration with Parallelization Method for the Greedy Selection in Radial Basis Functions Based Mesh Deformation. Appl. Sci. 2019, 9, 1141. [Google Scholar] [CrossRef]
- Kern, S.; Koumoutsakos, P. Simulations of optimized anguilliform swimming. J. Exp. Biol. 2006, 209, 4841–4857. [Google Scholar] [CrossRef] [PubMed]
- Gray, J. Studies in Animal Locomotion. J. Exp. Biol. 1933, 15, 506–517. [Google Scholar]
- Carling, J.; Williams, T.L.; Bowtell, G. Self-propelled anguilliform swimming: Simultaneous solution of the two-dimensional Navier-Stokes equations and Newton’s laws of motion. J. Exp. Biol. 1998, 201, 3143–3166. [Google Scholar]
- Donea, J.; Huerta, A.; Ponthot, J.P.; Rodriguez-Ferran, A. Arbitrary Lagrangian-Eulerian Methods. In Encyclopedia of Computational Mechanics; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2004; Chapter 14; Volume 1. [Google Scholar]
- Hirt, C.; Amsden, A.; Cook, J. An arbitrary Lagrangian–Eulerian computing method for all flow speeds. J. Comput. Phys. 1997, 135, 203–216. [Google Scholar] [CrossRef]
- Sahin, M.; Mohseni, K. An arbitrary Lagrangian–Eulerian formulation for the numerical simulation of flow patterns generated by the hydromedusa Aequorea victoria. J. Comput. Phys. 2009, 228, 4588–4605. [Google Scholar] [CrossRef]
- Issa, R.I. Solution of the implicitly discretised fluid flow equations by operator-splitting. J. Comput. Phys. 1986, 62, 40–65. [Google Scholar] [CrossRef]
- Borazjani, I.; Sotiropoulos, F. Numerical investigation of the hydrodynamics of carangiform swimming in the transitional and inertial flow regimes. J. Exp. Biol. 2008, 211, 1541–1558. [Google Scholar] [CrossRef] [PubMed]
- Borazjani, I.; Sotiropoulos, F. Numerical investigation of the hydrodynamics of anguilliform swimming in the transitional and inertial flow regimes. J. Exp. Biol. 2009, 212, 576–592. [Google Scholar] [CrossRef]
- Hieber, S.E.; Koumoutsakos, P. An immersed boundary method for smoothed particle hydrodynamics of self-propelled swimmers. J. Comput. Phys. 2008, 227, 8636–8654. [Google Scholar] [CrossRef]
- Ashraf, I.; Godoy-Diana, R.; Halloy, J.; Collignon, B.; Thiria, B. Synchronization and collective swimming patterns in fish (Hemigrammus bleheri). J. R. Soc. Interface 2016, 13, 20160734. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Re | Fluid Velocity | St |
|---|---|---|
| 1000 | 0.35, 0.4, 0.45, 0.5, 0.55, 0.6 |
| Re | Fluid Velocity | St | Spacing |
|---|---|---|---|
| 1000 | 0.15, 0.3, 0.4, 0.45, 0.5, 0.625 | , , , , , , |
| Re | Fluid Velocity | St | Swarm Shape | Spacing |
|---|---|---|---|---|
| 1000 | 0.45 | tandem, phalanx, diamond, rectangle | , , , , , , |
| Spacing | The Wake Direction | The Wake Size |
|---|---|---|
| up | ||
| down | ||
| down | ||
| up | ||
| down | ||
| up | ||
| down |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Li, C.; Xu, L.; Yang, W.; Chen, X. Numerical Simulation and Analysis of Fish-Like Robots Swarm. Appl. Sci. 2019, 9, 1652. https://doi.org/10.3390/app9081652
Li S, Li C, Xu L, Yang W, Chen X. Numerical Simulation and Analysis of Fish-Like Robots Swarm. Applied Sciences. 2019; 9(8):1652. https://doi.org/10.3390/app9081652
Chicago/Turabian StyleLi, Shuman, Chao Li, Liyang Xu, Wenjing Yang, and Xucan Chen. 2019. "Numerical Simulation and Analysis of Fish-Like Robots Swarm" Applied Sciences 9, no. 8: 1652. https://doi.org/10.3390/app9081652
APA StyleLi, S., Li, C., Xu, L., Yang, W., & Chen, X. (2019). Numerical Simulation and Analysis of Fish-Like Robots Swarm. Applied Sciences, 9(8), 1652. https://doi.org/10.3390/app9081652