Multi-Searcher Optimization for the Optimal Energy Dispatch of Combined Heat and Power-Thermal-Wind-Photovoltaic Systems


Abstract
:1. Introduction
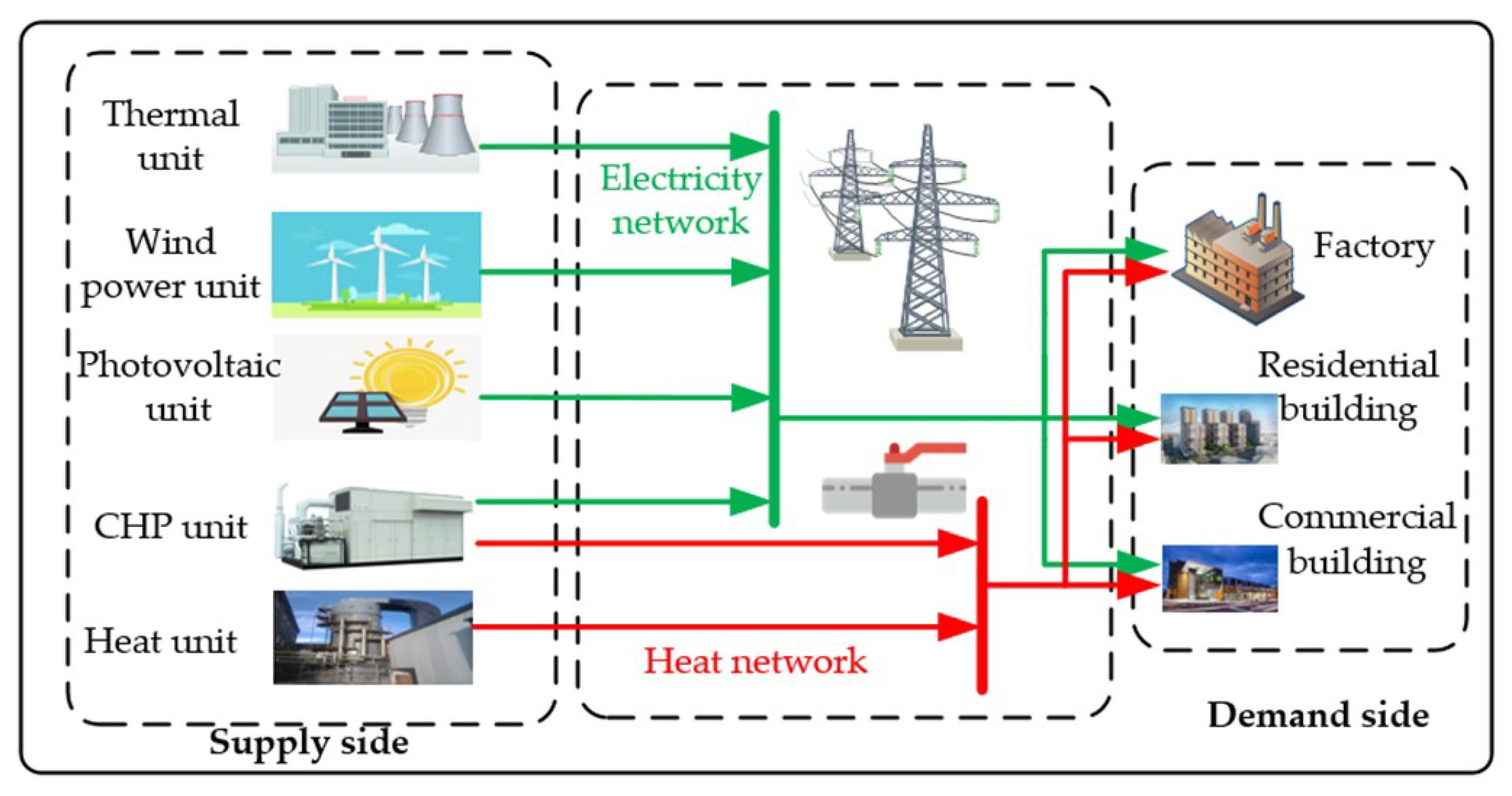
- Traditional ED only considers the electricity energy dispatch of power systems, but does not consider the heat energy dispatch of thermal systems. In contrast, the presented OED can achieve electricity and heat energy dispatch simultaneously, while the stochastic characteristics of wind and PV energy are fully taken into account;
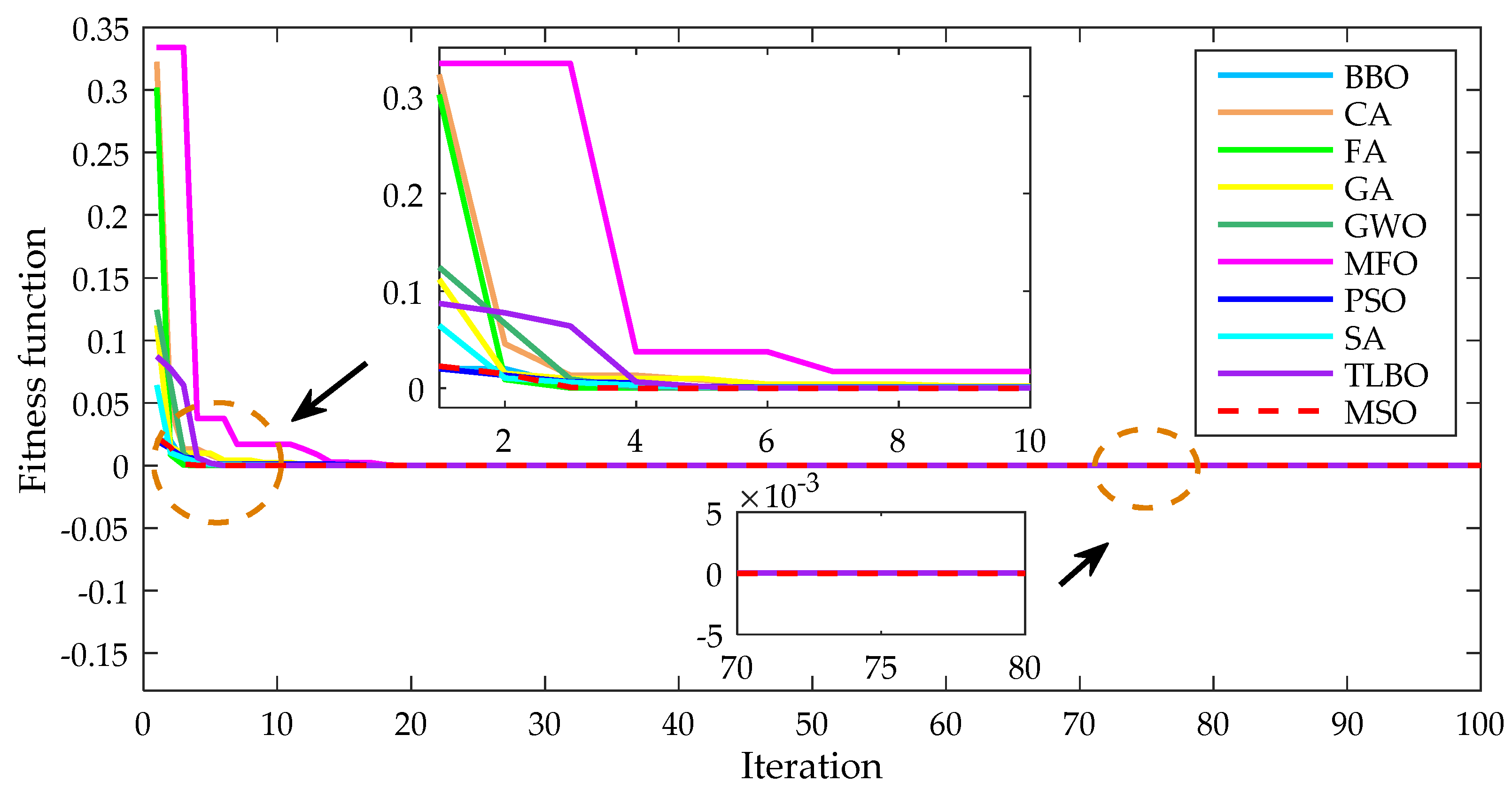
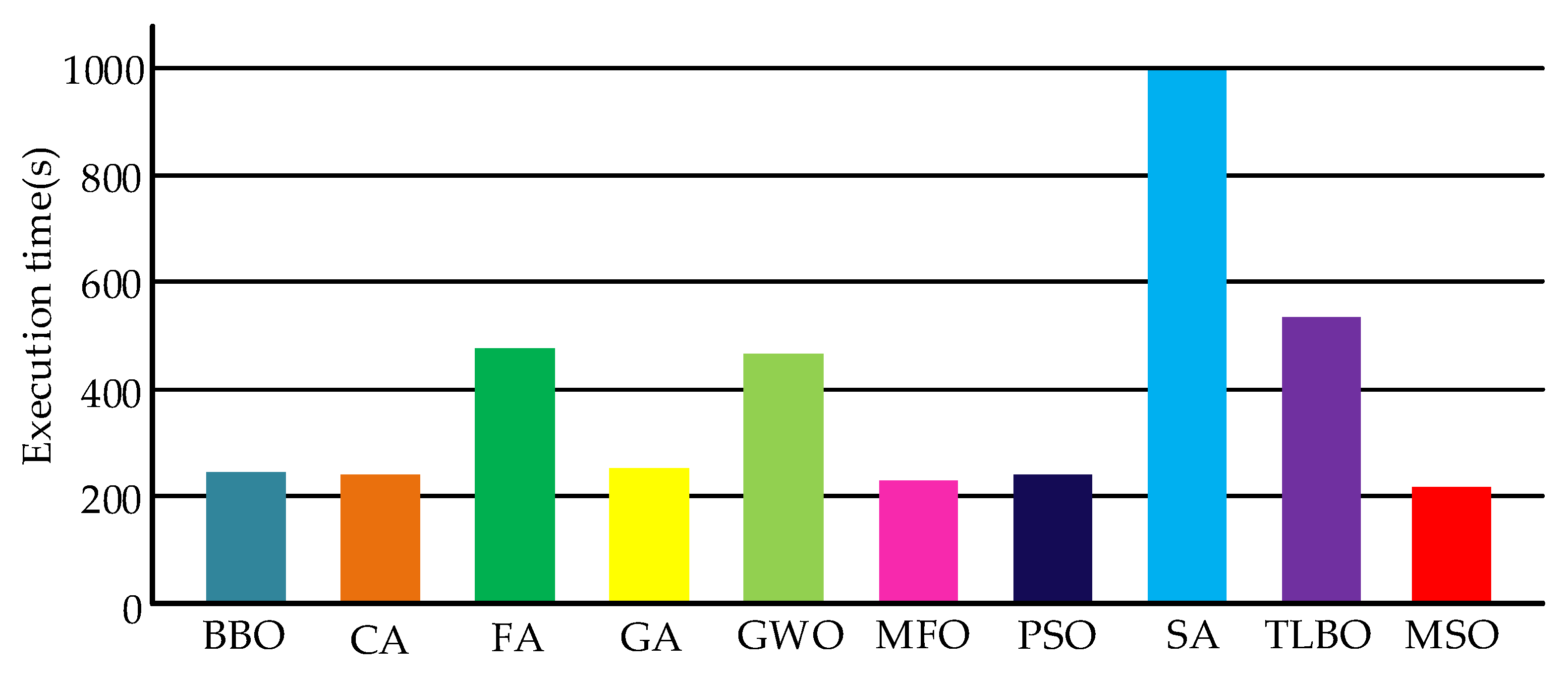
- Through combination with the chaos theory, the global search ability of the MSO can be effectively enhanced. Besides, a double-layer searcher is designed to accelerate the convergence of MSO, while a high-quality optimal solution can be guaranteed. Compared with nine existing heuristic algorithms, the proposed MSO can search a higher quality dispatch scheme for OED within a shorter computation time.
2. Mathematical Model of OED of Combined Heat and Power-Thermal-Wind-Photovoltaic Systems
2.1. Renewable Energy
2.1.1. Relationship between Wind Speed and Wind Power Output
2.1.2. Relationship between Solar Irradiance and Solar Power Output
2.2. Objective Function
2.2.1. Thermal Units
2.2.2. CHP Units
2.2.3. Heat-Only Units
2.2.4. WT Units
2.2.5. PV Units
2.3. Constraints
2.3.1. Equality Constraints
2.3.2. Inequality Constraints
3. Multi-Searcher Optimization
3.1. Chaos Theory
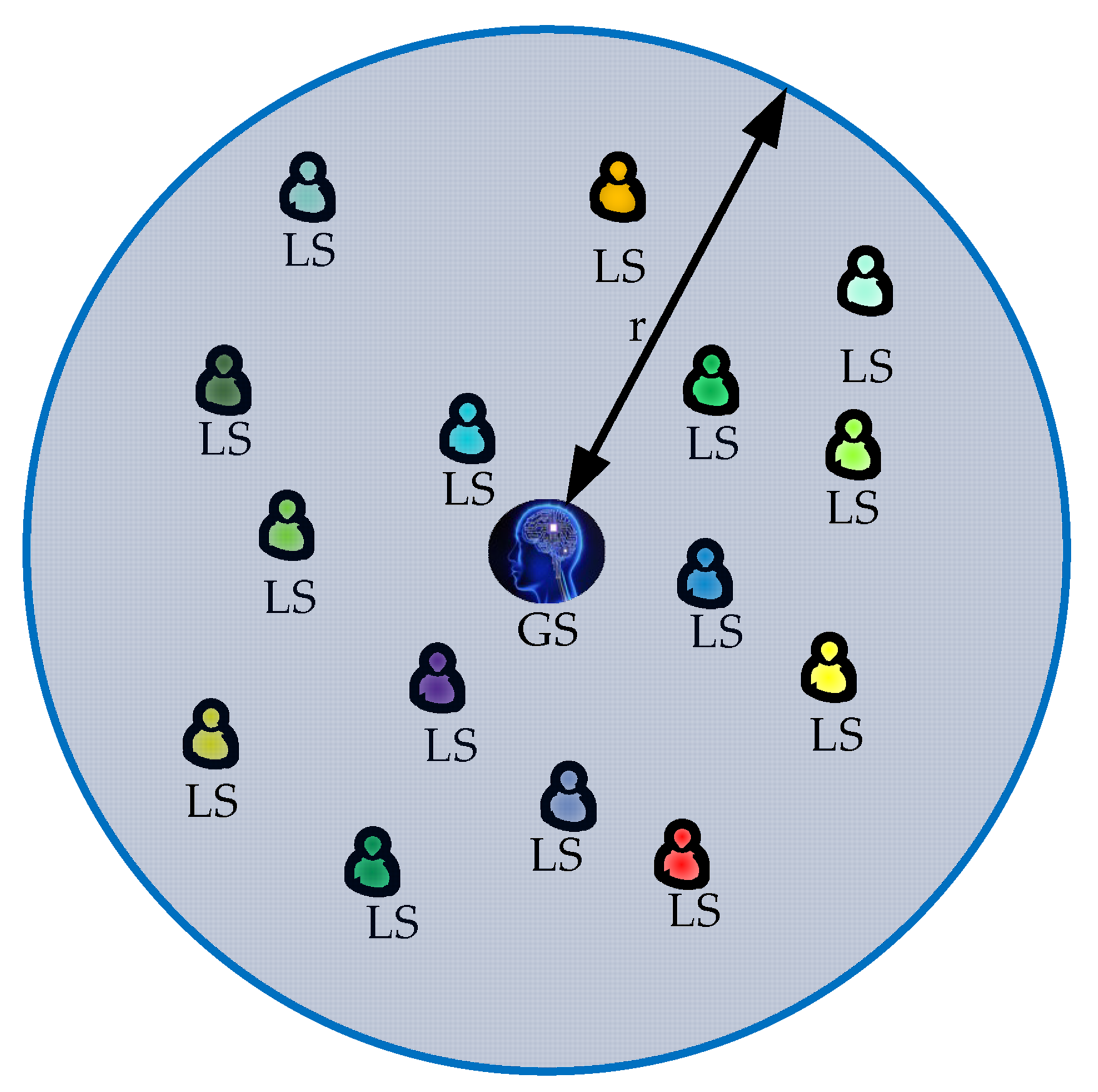
3.2. Double Layer Searcher
3.3. Random Walk Rule
3.4. Constraint Processing
3.5. Execution Procedure
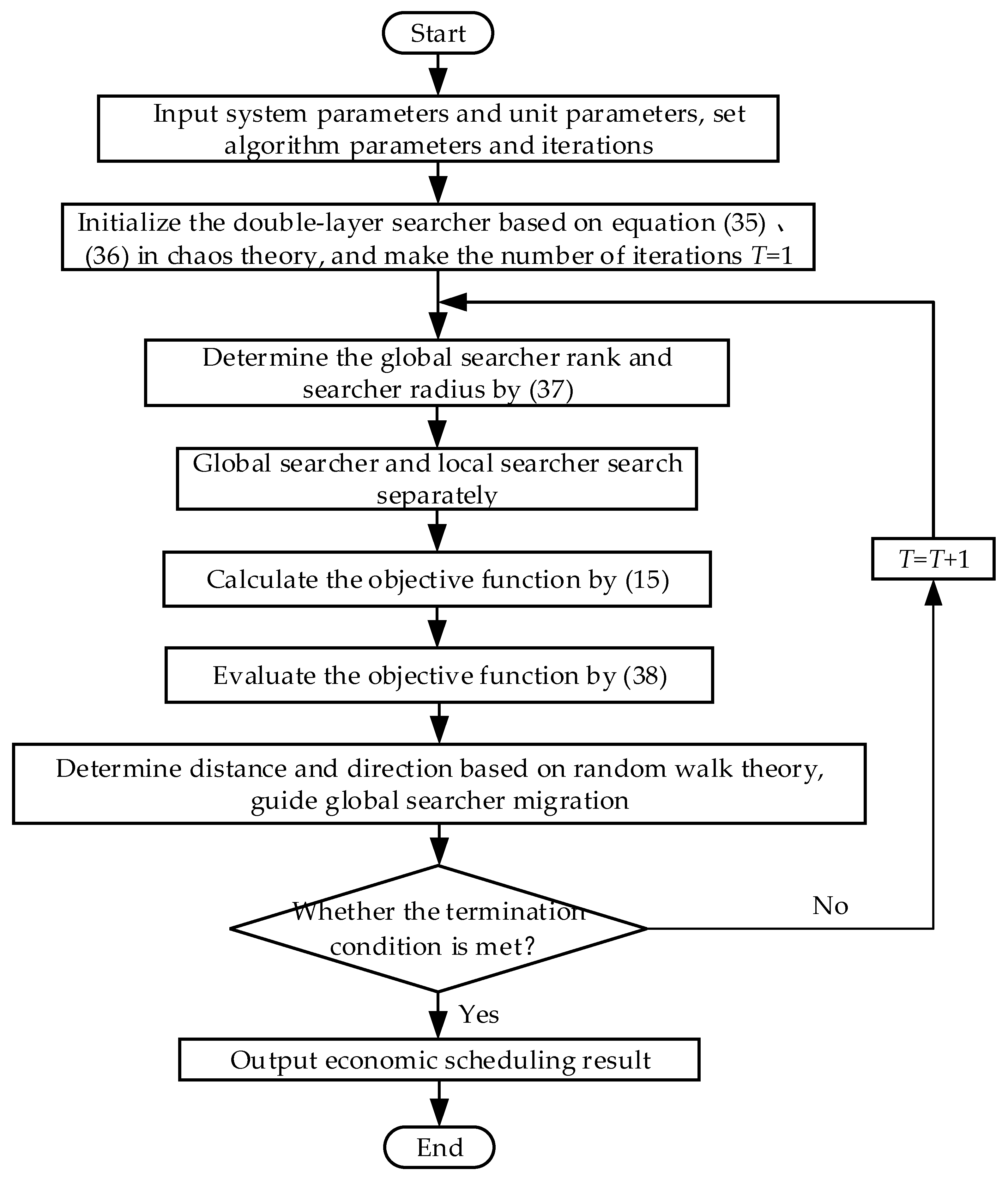
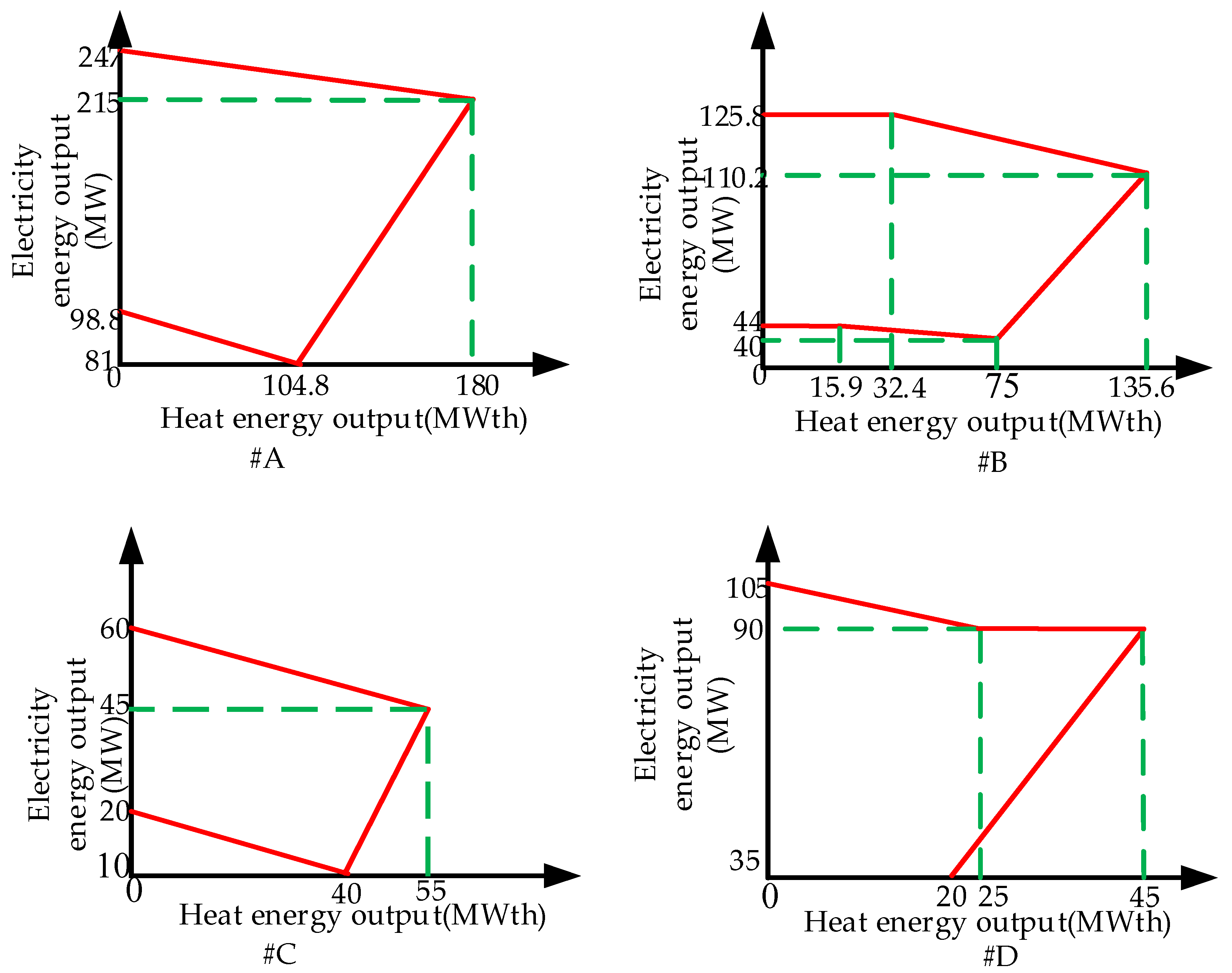
- Step 1: Input system parameters and unit parameters, including the operating cost coefficients of the thermal units, CHP units and heat-only units, the feasible operating region of the CHP units, and the main parameters of renewable energy resources such as wind speed and solar irradiance. Set the algorithm parameters, including the number of GS, the number of LS, the maximum search radius, minimum search radius, and the maximum iteration number.
- Step 2: Initialize the double-layer searcher based on Equations (35)–(36) in chaos theory; and set the current iteration number T = 1.
- Step 3: Determine the global searcher level and searcher radius with Equation (37). Particularly, the level 0 is assigned to the GS corresponding to the least cost, and the highest level is assigned to the GS corresponding to the highest cost.
- Step 4: Implement the global searcher and local searcher separately, where the local searcher is surrounded by each global searcher and centered around the searcher within a specified radius.
- Step 5: Calculate the objective function with Equation (15), which is equal to the total operating cost.
- Step 6: Evaluate the objective function using the penalty function method from Equation (38), based on the given M.
- Step 7: Determine the distance and direction based on random walk theory and guide global searcher migration, in which both λ and Ɵ are the random values with a distribution of uniform probability.
- Step 8: Judge the termination of MSO. If the termination condition is met, then output the economic scheduling result, else turn to step 3 and enter the next iteration.
4. Case Studies
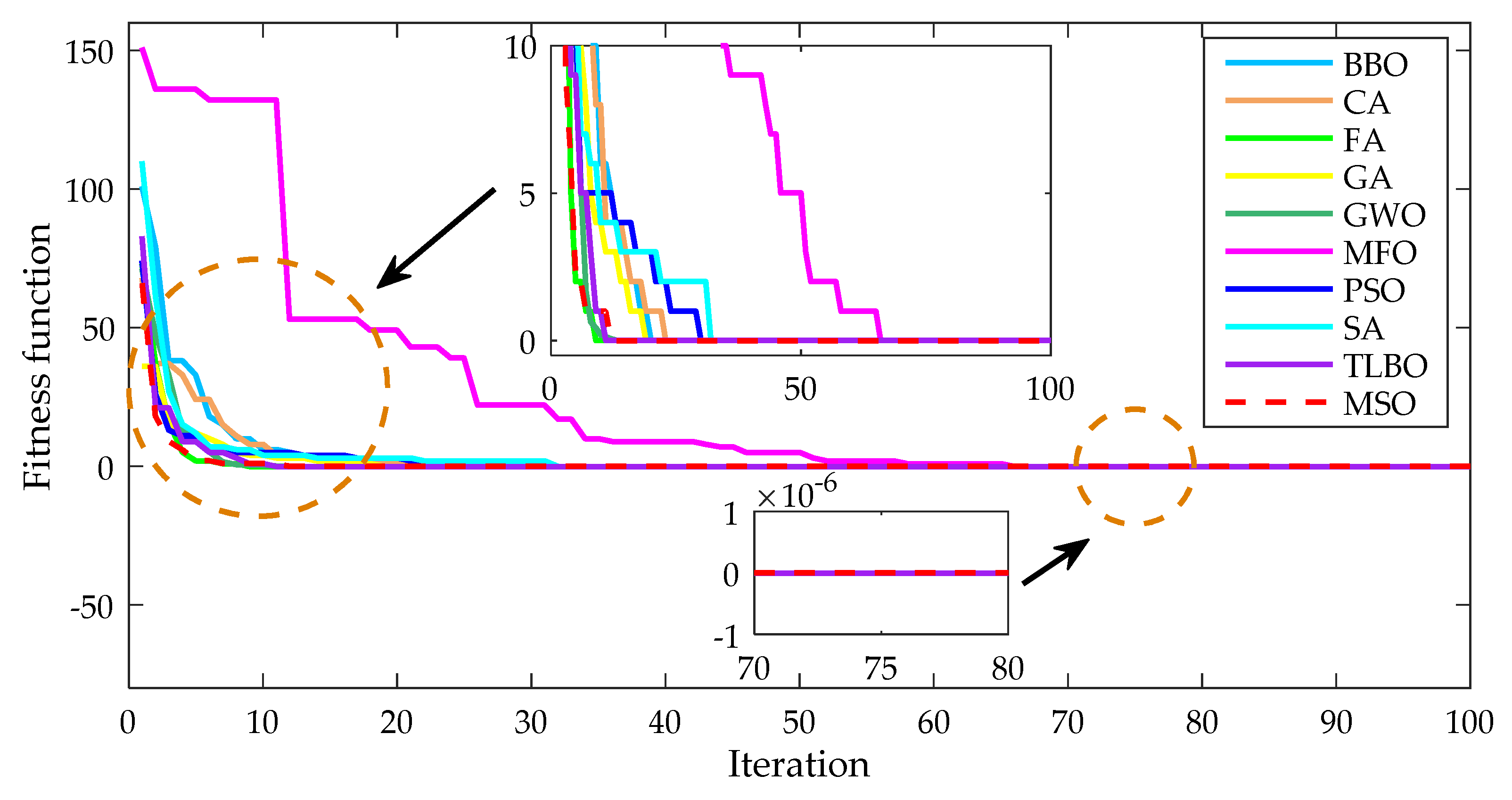
4.1. Benchmark Test Function
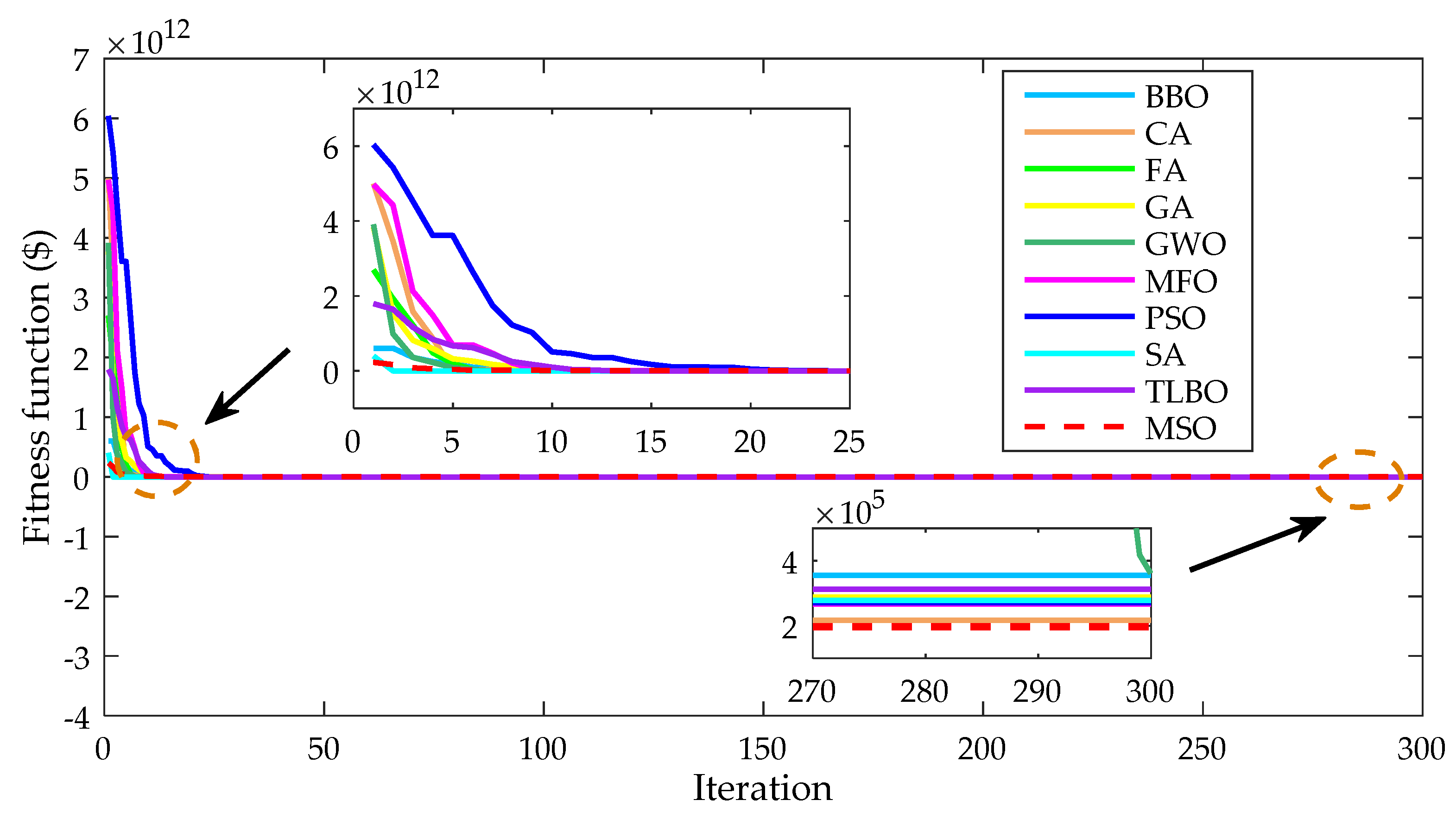
4.2. Simulation Model
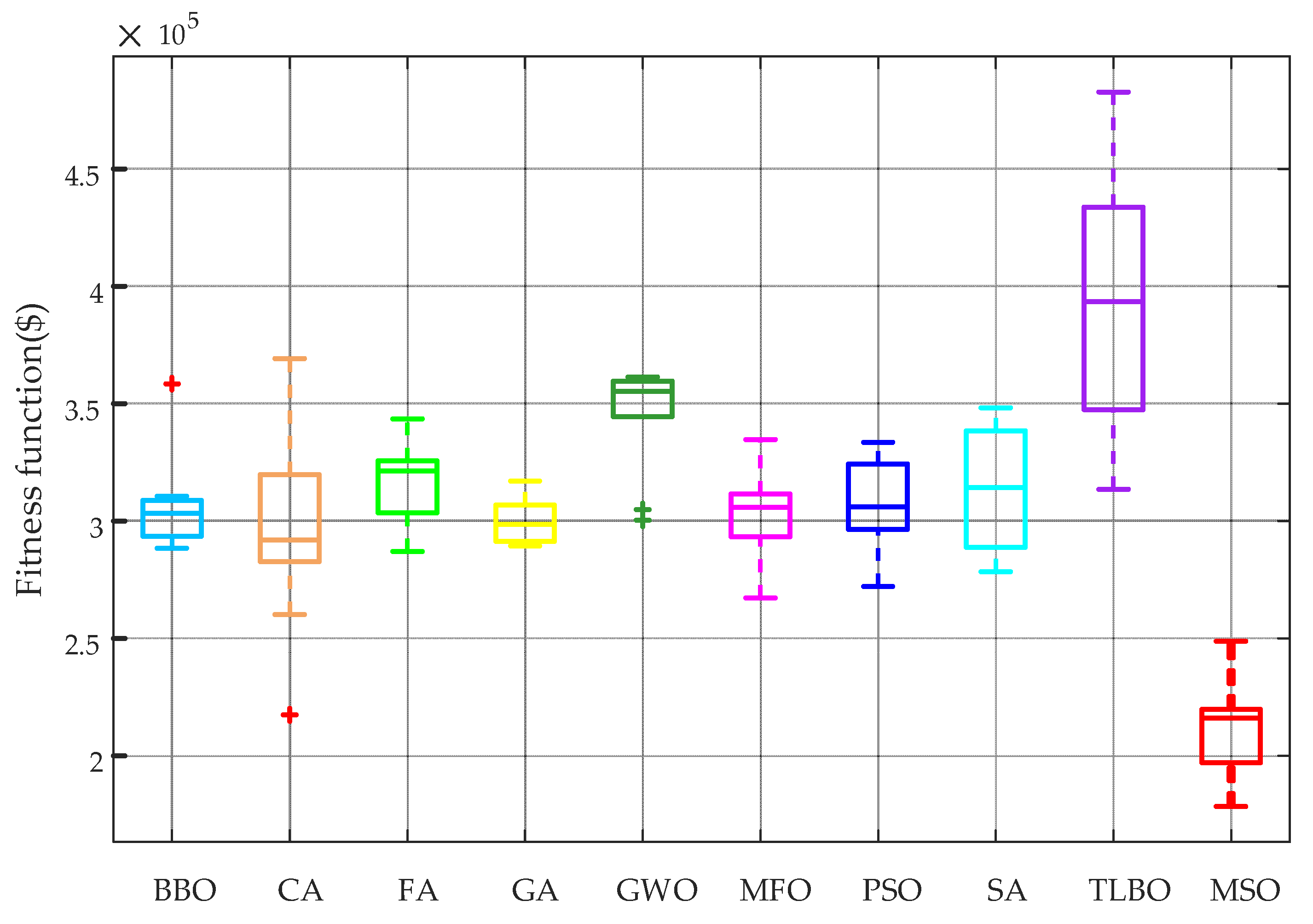
4.3. Discussion and Analysis
5. Conclusions
- The introduction of chaos theory can effectively maintain the non-repetition of the initial population and the diversity of the searcher, which can improve the global search ability of MSO.
- The double-layer searcher can effectively make the proposed MSO quickly converge to the best advantage, and avoid the defects that cause the traditional heuristic algorithm to easily fall into a low-quality local optimum.
- The superior performance of the MSO was verified by the benchmark test function and a specific engineering optimization of OED, compared with various heuristic algorithms.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| ED | Economic dispatch |
| IES | Integrated energy system |
| WT | Wind turbine |
| PV | Photovoltaic |
| OMEF | Optimal multi-energy flow |
| MABL | Multi-agent bargaining learning |
| EHED | Energy hub economic dispatch |
| MECS | Multiple energy carrier systems |
| OED | Optimal energy dispatch |
| GA | Genetic algorithm |
| PSO | Particle swarm optimization |
| DE | Differential evolution |
| GWO | Grey wolf optimizer |
| MSO | Multi-searcher optimization |
| CHP | Combined heat and power |
| GS | Global searcher |
| LS | Local searcher |
| BBO | Biogeography-based optimization |
| CA | Cultural algorithm |
| FA | Firefly algorithm |
| MFO | Moth-flame optimization |
| SA | Simulated annealing |
| TLBO | Teach-learn based optimization algorithm |
| V | Speed random variable |
| v | Wind speed |
| k | Shape factor of the wind speed probability distribution function |
| c | Scale factor of the wind speed probability distribution function |
| pwt | Current maximum power points of wind turbines unit |
| Rated power of WT unit | |
| vr | Rated wind speed |
| vin, vout | Cut-in and cut-out wind speeds, respectively |
| PWT | Wind power random variable |
| rmax | Maximum solar irradiance |
| r | Solar irradiance |
| A | Total area of the photovoltaic cell |
| ppv | Output power of a PV cell |
| Maximum generated power | |
| Ci () | Cost function of the ith thermal unit |
| Cj [, ] | Cost function of the jth CHP |
| Ck () | Cost function of the kth heat-only unit |
| Cwt,l (Pl) | Cost function of the lth WT unit |
| Cpv,m (Pm) | Cost function of the mth PV unit |
| Minimum power generation limit of the ith thermal unit | |
| Electricity energy output of the ith thermal unit | |
| Electricity energy output of the jth CHP unit | |
| Heat energy output of the jth CHP unit | |
| Heat energy output of the kth heat-only unit | |
| dwt,l | Direct cost coefficients of the lth wind power |
| Pwt,l | Electricity energy output of the lth wind power |
| Kue,wt,l | Underestimated coefficient of the lth wind power |
| Pwt,rate,l | Rated power generation of the lth wind power |
| Pwt,l | Scheduled power generation of the lth wind power |
| Koe,wt,l | Overestimated coefficient of the lth wind power |
| dpv,m | Direct cost coefficients of the mth PV power unit |
| Kue,pv,m | Underestimated coefficient of the mth PV unit |
| Koe,pv,m | Overestimated coefficient of the mth PV unit |
| Pd, Hd | Total electricity and heat energy demands, respectively |
| , | Lower and upper bounds of the ith thermal unit, respectively |
| , | Lower and upper bounds of the kth heat-only unit, respectively |
| (), () | Lower and upper bounds of the jth CHP unit, respectively |
| (), () | Lower and upper bounds of the jth CHP unit, respectively |
| xmin, xmax | Lower and upper limits of the optimization variable, respectively |
| rmax, rmin | Pre-set maximum and minimum radius |
| kGS | Level of GS |
| nGS | Number of global searchers |
| Gbest | Global optimal solution |
| dist(GS,Gbest) | Distance between the global searcher and the global best |
| Ɵ | Direction angle |
| λ | Random value with a distribution of uniform probability in the range of 0–1 |
References
- Li, Y.-S.; Zhang, H.-G.; Huang, B.-N.; Teng, F. Distributed Optimal Economic Dispatch Based on Multi-Agent System Framework in Combined Heat and Power Systems. Appl. Sci. 2016, 6, 308. [Google Scholar] [CrossRef]
- Shao, C.; Ding, Y.; Wang, J.; Song, Y. Modeling and Integration of Flexible Demand in Heat and Electricity Integrated Energy System. IEEE Trans. Sustain. Energy 2018, 9, 361–370. [Google Scholar] [CrossRef]
- Li, J.; Niu, D.; Wu, M.; Wang, Y.; Li, F.; Dong, H. Research on Battery Energy Storage as Backup Power in the Operation Optimization of a Regional Integrated Energy System. Energies 2018, 11, 2990. [Google Scholar] [CrossRef]
- Qu, K.; Yu, T.; Huang, L.; Yang, B.; Zhang, X. Decentralized optimal multi-energy flow of large-scale integrated energy systems in a carbon trading market. Energy 2018, 149, 779–791. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, H.; Yong, M.; Huang, Y.; Zhang, F.; Wang, X. Optimal Scheduling of Integrated Energy Systems with Combined Heat and Power Generation, Photovoltaic and Energy Storage Considering Battery Lifetime Loss. Energies 2018, 11, 1676. [Google Scholar] [CrossRef]
- Zhang, X.; Yu, T.; Zhang, Z.; Tang, J. Multi-Agent Bargaining Learning for Distributed Energy Hub Economic Dispatch. IEEE Access 2018, 6, 39564–39573. [Google Scholar] [CrossRef]
- Borowy, B.S.; Salameh, Z.M. Optimum photovoltaic array size for a hybrid wind/PV system. IEEE Trans. Energy Convers. 1994, 9, 482–488. [Google Scholar] [CrossRef]
- Wang, M.Q.; Gooi, H.B.; Chen, S.X.; Lu, S. A Mixed Integer Quadratic Programming for Dynamic Economic Dispatch with Valve Point Effect. IEEE Trans. Power Syst. 2014, 29, 2097–2106. [Google Scholar] [CrossRef]
- Lin, W.-M.; Chen, S.-J. Bid-based dynamic economic dispatch with an efficient interior point algorithm. Int. J. Electr. Power Energy Syst. 2002, 24, 51–57. [Google Scholar] [CrossRef]
- Ramanathan, R. Fast Economic Dispatch Based on the Penalty Factors from Newton’s Method. IEEE Trans. Power App. Syst. 1985, PAS-104, 1624–1629. [Google Scholar] [CrossRef]
- Bakhshi, R.; Sadeh, J.; Mosaddegh, H.-R. Optimal economic designing of grid-connected photovoltaic systems with multiple inverters using linear and nonlinear module models based on Genetic Algorithm. Renew. Energy 2014, 72, 386–394. [Google Scholar] [CrossRef]
- Deng, W.; Zhao, H.; Yang, X.; Xiong, J.; Sun, M.; Li, B. Study on an improved adaptive PSO algorithm for solving multi-objective gate assignment. Appl. Soft Comput. 2017, 59, 288–302. [Google Scholar] [CrossRef]
- Dai, S.; Niu, D.; Han, Y. Forecasting of Power Grid Investment in China Based on Support Vector Machine Optimized by Differential Evolution Algorithm and Grey Wolf Optimization Algorithm. Appl. Sci. 2018, 8, 636. [Google Scholar] [CrossRef]
- Yang, B.; Zhang, X.; Yu, T.; Shu, H.; Fang, Z. Grouped grey wolf optimizer for maximum power point tracking of doubly-fed induction generator based wind turbine. Energy Convers. Manag. 2017, 133, 427–443. [Google Scholar] [CrossRef]
- Wang, L.; Zhou, Y.; Xu, J. Optimal Irregular Wind Farm Design for Continuous Placement of Wind Turbines with a Two-Dimensional Jensen-Gaussian Wake Model. Appl. Sci. 2018, 8, 2660. [Google Scholar] [CrossRef]
- Carta, J.A.; Ramírez, P. Analysis of two-component mixture Weibull statistics for estimation of wind speed distributions. Renew. Energy 2007, 32, 518–531. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, C.; Yuan, J. Hybrid energy scheduling in a renewable micro grid. Appl. Sci. 2015, 5, 516–531. [Google Scholar] [CrossRef]
- Hetzer, J.; Yu, D.C.; Bhattarai, K. An Economic Dispatch Model Incorporating Wind Power. IEEE Trans. Energy Convers. 2008, 23, 603–611. [Google Scholar] [CrossRef]
- Salameh, Z.M.; Borowy, B.S.; Amin, A.R.A. Photovoltaic module-site matching based on the capacity factors. IEEE Trans. Energy Convers. 1995, 10, 326–332. [Google Scholar] [CrossRef]
- Chen, S.X.; Gooi, H.B.; Wang, M.Q. Sizing of Energy Storage for Microgrids. IEEE Trans. Smart Grid 2012, 3, 142–151. [Google Scholar] [CrossRef]
- Yang, B.; Yu, T.; Zhang, X.; Li, H.; Shu, H.; Sang, Y.; Jiang, L. Dynamic leader based collective intelligence for maximum power point tracking of PV systems affected by partial shading condition. Energy Convers. Manag. 2019, 179, 286–303. [Google Scholar] [CrossRef]
- Bouchekara, H.R.E.H.; Chaib, A.E.; Abido, M.A. Optimal power flow using GA with a new multi-parent crossover considering: Prohibited zones, valve-point effect, multi-fuels and emission. Electr. Eng. 2018, 100, 151–165. [Google Scholar] [CrossRef]
- Dinh, B.H.; Nguyen, T.T.; Quynh, N.V.; Van Dai, L. A Novel Method for Economic Dispatch of Combined Heat and Power Generation. Energies 2018, 11, 3113. [Google Scholar] [CrossRef]
- Aghaei, J.; Alizadeh, M.-I. Multi-objective self-scheduling of CHP (combined heat and power)-based microgrids considering demand response programs and ESSs (energy storage systems). Energy 2013, 55, 1044–1054. [Google Scholar] [CrossRef]
- Morshed, M.J.; Hmida, J.B.; Fekih, A. A probabilistic multi-objective approach for power flow optimization in hybrid wind-PV-PEV systems. Appl. Energy 2018, 211, 1136–1149. [Google Scholar] [CrossRef]
- Liang, H.; Liu, Y.; Shen, Y.; Li, F.; Man, Y. A Hybrid Bat Algorithm for Economic Dispatch with Random Wind Power. IEEE Trans. Power Syst. 2018, 33, 5052–5061. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Chattopadhyay, P.K. Biogeography-Based Optimization for Different Economic Load Dispatch Problems. IEEE Trans. Power Syst. 2010, 25, 1064–1077. [Google Scholar] [CrossRef]
- Freitas, C.A.O.D.; de Oliveira, R.C.L.; Silva, D.J.A.D.; Leite, J.C.; Junior, J.D.A.B. Solution to Economic—Emission Load Dispatch by Cultural Algorithm Combined with Local Search: Case Study. IEEE Access 2018, 6, 64023–64040. [Google Scholar] [CrossRef]
- Yang, X.-S.; Sadat Hosseini, S.S.; Gandomi, A.H. Firefly Algorithm for solving non-convex economic dispatch problems with valve loading effect. Appl. Soft Comput. 2012, 12, 1180–1186. [Google Scholar] [CrossRef]
- Li, C.; Li, S.; Liu, Y. A least squares support vector machine model optimized by moth-flame optimization algorithm for annual power load forecasting. Appl. Intell. 2016, 45, 1166–1178. [Google Scholar] [CrossRef]
- Xu, T.; Meng, H.; Zhu, J.; Wei, W.; Zhao, H.; Yang, H.; Li, Z.; Ren, Y. Considering the Life-Cycle Cost of Distributed Energy-Storage Planning in Distribution Grids. Appl. Sci. 2018, 8, 2615. [Google Scholar] [CrossRef]
- Nadeem, Z.; Javaid, N.; Malik, A.W.; Iqbal, S. Scheduling Appliances with GA, TLBO, FA, OSR and Their Hybrids Using Chance Constrained Optimization for Smart Homes. Energies 2018, 11, 888. [Google Scholar] [CrossRef]
- Yang, Y.; Li, S.; Li, W.; Qu, M. Power load probability density forecasting using Gaussian process quantile regression. Appl. Energy 2018, 213, 499–509. [Google Scholar] [CrossRef]
- Suryanarayana, G.; Lago, J.; Geysen, D.; Aleksiejuk, P.; Johansson, C. Thermal load forecasting in district heating networks using deep learning and advanced feature selection methods. Energy 2018, 157, 141–149. [Google Scholar] [CrossRef]
- Ahmad, T.; Chen, H. Short and medium-term forecasting of cooling and heating load demand in building environment with data-mining based approaches. Energy Build. 2018, 166, 460–476. [Google Scholar] [CrossRef]
- Mohammadi-Ivatloo, B.; Moradi-Dalvand, M.; Rabiee, A. Combined heat and power economic dispatch problem solution using particle swarm optimization with time varying acceleration coefficients. Electr. Power Syst. Res. 2013, 95, 9–18. [Google Scholar] [CrossRef]
- Beigvand, S.D.; Abdi, H.; La Scala, M. Combined heat and power economic dispatch problem using gravitational search algorithm. Electr. Power Syst. Res. 2016, 133, 160–172. [Google Scholar] [CrossRef]
- Piperagkas, G.S.; Anastasiadis, A.G.; Hatziargyriou, N.D. Stochastic PSO-based heat and power dispatch under environmental constraints incorporating CHP and wind power units. Electr. Power Syst. Res. 2011, 81, 209–218. [Google Scholar] [CrossRef]
- Zhao, J.; Wen, F.; Dong, Z.Y.; Xue, Y.; Wong, K.P. Optimal Dispatch of Electric Vehicles and Wind Power Using Enhanced Particle Swarm Optimization. IEEE Trans. Ind. Inform. 2012, 8, 889–899. [Google Scholar] [CrossRef]
- Karaki, S.H.; Chedid, R.B.; Ramadan, R. Probabilistic performance assessment of autonomous solar-wind energy conversion systems. IEEE Trans. Energy Convers. 1999, 14, 766–772. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameter | Value |
|---|---|---|
| BBO | Number of habitats | 150 |
| Keep rate | 0.2 | |
| Mutation | 0.1 | |
| CA | Population size | 150 |
| Acceptance ratio | 0.35 | |
| FA | Number of fireflies | 150 |
| Light absorption coefficient | 1 | |
| Attraction coefficient base value | 2 | |
| Mutation coefficient | 0.2 | |
| Mutation coefficient damping ratio | 0.98 | |
| GA | Population size | 150 |
| Mutation probability | 0.1 | |
| Crossover probability | 0.75 | |
| Generation gap | 0.8 | |
| GWO | Population size | 150 |
| MFO | Total number of moths | 150 |
| PSO | Inertia weight Inertia weight damping ratio Personal learning coefficient Global learning coefficient | 1 0.99 1.5 2.0 |
| SA | Maximum number of sub-iterations | 20 |
| Initial temp. | 0.1 | |
| Temp. reduction rate | 0.99 | |
| Number of neighbors per individual | 5 | |
| Mutation rate | 0.5 | |
| TLBO | Population size | 150 |
| MSO | Number of global searchers | 150 |
| Number of local searchers | 30 | |
| Maximum search radius | 1.414 | |
| Minimum search radius | 1e-4 |
| Unit No. | Minimum (MW) | Maximum (MW) | Operating Cost Coefficients | ||||
|---|---|---|---|---|---|---|---|
| a | b | c | d | e | |||
| G1 | 10 | 75 | 0.008 | 2 | 25 | 100 | 0.042 |
| G2 | 20 | 125 | 0.003 | 1.8 | 60 | 140 | 0.04 |
| G3 | 30 | 175 | 0.0012 | 2.1 | 100 | 160 | 0.038 |
| G4 | 40 | 250 | 0.001 | 2 | 120 | 180 | 0.037 |
| G5 | 0 | 680 | 0.00028 | 8.1 | 550 | 300 | 0.035 |
| G6 | 0 | 360 | 0.00056 | 8.1 | 309 | 200 | 0.042 |
| G7 | 0 | 360 | 0.00056 | 8.1 | 309 | 200 | 0.042 |
| G8 | 60 | 180 | 0.000324 | 7.74 | 240 | 150 | 0.063 |
| G9 | 60 | 180 | 0.000324 | 7.74 | 240 | 150 | 0.063 |
| G10 | 40 | 120 | 0.00284 | 8.6 | 126 | 100 | 0.084 |
| G11 | 40 | 120 | 0.00284 | 8.6 | 126 | 100 | 0.084 |
| G12 | 55 | 120 | 0.00284 | 8.6 | 126 | 100 | 0.084 |
| G13 | 55 | 120 | 0.00284 | 8.6 | 126 | 100 | 0.084 |
| Unit No. | Feasible Region Number | Operating Cost Coefficients | |||||
|---|---|---|---|---|---|---|---|
| a | b | c | d | e | f | ||
| CHP1 | #A | 0.0345 | 14.5 | 0.03 | 4.2 | 0.031 | 2650 |
| CHP2 | #B | 0.0435 | 36 | 0.027 | 0.6 | 0.011 | 1250 |
| CHP3 | #C | 0.1035 | 34.5 | 0.025 | 2.203 | 0.051 | 2650 |
| CHP4 | #D | 0.072 | 20 | 0.02 | 2.34 | 0.04 | 1565 |
| Unit No. | Minimum (MWth) | Maximum (MWth) | Operating Cost Coefficients | ||
|---|---|---|---|---|---|
| a | b | c | |||
| H1 | 0 | 60 | 0.038 | 2.0109 | 950 |
| H2 | 0 | 60 | 0.038 | 2.0109 | 950 |
| H3 | 0 | 120 | 0.052 | 3.0651 | 480 |
| H4 | 0 | 120 | 0.052 | 3.0651 | 480 |
| WT | k | c | vin | vout | vr | dwt,l | Kue,wt,l | Koe,wt,l |
| 2 | 15 | 15 m/s | 45 m/s | 5 m/s | 120$/MWh | 15$/MWh | 20$/MWh | |
| PV | k | c | A | η | rmax | dpv,m | Kue,pv,m | Koe,pv,m |
| 0.95 | 0.95 | 80,000 m2 | 14% | 700 W/m2 | 200$/MWh | 15$/MWh | 20$/MWh |
| Type | Output | Optimal Energy Generations and Consumptions | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| BBO | CA | FA | GA | GWO | MFO | PSO | SA | TLBO | MSO | ||
| Power | P1(MW) | 63.9199 | 50.2982 | 32.8433 | 74.2171 | 25.4700 | 69.8638 | 69.6133 | 53.7707 | 75 | 72.9133 |
| Power | P2(MW) | 113.3121 | 124.1695 | 124.8105 | 109.0534 | 115.3113 | 124.9997 | 78.8729 | 100.9643 | 125 | 121.5222 |
| Power | P3(MW) | 147.0970 | 174.5121 | 135.2467 | 174.8051 | 163.9012 | 174.9704 | 174.5487 | 168.9912 | 167.0758 | 174.8046 |
| Power | P4(MW) | 234.7876 | 246.0860 | 248.6721 | 249.7978 | 245.4024 | 250 | 249.7967 | 248.8495 | 250 | 246.8026 |
| Power | P5(MW) | 678.6543 | 680 | 676.4627 | 632.1365 | 678.0293 | 680 | 672.4073 | 679.7625 | 678.3858 | 678.1835 |
| Power | P6(MW) | 353.4480 | 356.1580 | 347.8350 | 345.8947 | 354.9882 | 360 | 353.9936 | 334.3117 | 359.0481 | 207.6681 |
| Power | P7(MW) | 346.9123 | 358.2707 | 359.5087 | 347.0761 | 351.3845 | 354.3039 | 359.1757 | 357.7283 | 336.4010 | 359.3603 |
| Power | P8(MW) | 158.9928 | 179.7758 | 149.0258 | 172.9118 | 179.8825 | 180 | 174.0666 | 174.3501 | 154.0664 | 133.1413 |
| Power | P9(MW) | 160.8106 | 176.7479 | 179.8817 | 149.3145 | 160.4787 | 180 | 172.5623 | 152.6315 | 148.5617 | 179.6216 |
| Power | P10(MW) | 111.1568 | 110.9370 | 119.7094 | 112.1830 | 96.9748 | 40.5031 | 68.8161 | 114.0089 | 116.1228 | 119.7769 |
| Power | P11(MW) | 102.1842 | 114.9364 | 119.9975 | 119.4566 | 113.2193 | 119.6362 | 103.8989 | 110.0237 | 111.6787 | 119.5531 |
| Power | P12(MW) | 104.8899 | 115.0328 | 118.9527 | 83.5559 | 100.2694 | 120 | 113.1716 | 104.4521 | 111.4735 | 94.3322 |
| Power | P13(MW) | 106.8717 | 118.2986 | 114.2327 | 114.0840 | 119.3736 | 89.8493 | 119.3128 | 119.8252 | 119.3451 | 119.8543 |
| CHP | P1(MW) | 216.2329 | 214.9459 | 201.2094 | 217.5942 | 190.6078 | 212.4834 | 216.2177 | 209.3288 | 209.6084 | 215.7856 |
| CHP | P2(MW) | 109.3852 | 121.3602 | 125.7600 | 114.4708 | 125.2795 | 125.8000 | 124.2405 | 112.4446 | 125.8000 | 125.7079 |
| CHP | P3(MW) | 47.4780 | 53.8661 | 45.0250 | 52.1900 | 52.5267 | 21.8770 | 47.1903 | 48.6115 | 37.9819 | 47.2630 |
| CHP | P4(MW) | 87.1271 | 102.0008 | 88.7410 | 89.5285 | 89.5829 | 105 | 88.9730 | 81.9464 | 83.5980 | 96.3486 |
| CHP | H1(MWth) | 154.0902 | 105.8885 | 137.2843 | 160.1196 | 159.2691 | 145.1058 | 169.4321 | 136.2003 | 174.9980 | 174.9259 |
| CHP | H2(MWth) | 106.9527 | 92.6726 | 134.2239 | 91.5831 | 125.2321 | 135.6000 | 124.8527 | 135.2694 | 118.0129 | 134.8678 |
| CHP | H3(MWth) | 16.0218 | 53.6726 | 53.7538 | 10.5961 | 25.9293 | 22.8804 | 22.1764 | 39.4864 | 0 | 46.5418 |
| CHP | H4(MWth) | 21.5980 | 21.3337 | 24.3441 | 36.1383 | 44.5992 | 0 | 22.9493 | 3.2973 | 40.5366 | 13.9497 |
| Heat | H1(MWth) | 42.1456 | 57.7742 | 0.0037 | 43.8526 | 59.4136 | 49.1198 | 51.9038 | 35.5999 | 57.1123 | 51.4381 |
| Heat | H2(MWth) | 52.2251 | 58.2197 | 53.8983 | 41.4130 | 2.0371 | 60 | 34.9737 | 53.6162 | 34.3344 | 20.0704 |
| Heat | H3(MWth) | 114.3246 | 109.4519 | 114.8345 | 113.3593 | 113.5565 | 120 | 106.5802 | 111.6646 | 118.4561 | 54.0932 |
| Heat | H4(MWth) | 108.0201 | 119.4701 | 97.0291 | 118.3100 | 85.3231 | 82.6663 | 82.5075 | 100.2394 | 71.9065 | 119.4848 |
| WT | P1(MW) | 100.0860 | 42.3449 | 105.3791 | 94.0481 | 107.5722 | 47.8285 | 99.7987 | 81.8546 | 116.7154 | 127.5110 |
| WT | P2(MW) | 89.3316 | 54.7974 | 54.5304 | 82.8050 | 89.8558 | 94 | 60.8604 | 81.8527 | 21.7147 | 87.8778 |
| WT | P3(MW) | 85.4007 | 57.7908 | 93.4421 | 84.6737 | 62.4906 | 57.8187 | 76.7202 | 82.9566 | 89.6349 | 93.6118 |
| PV | P1(MW) | 137.7660 | 142.5187 | 149.6020 | 149.8539 | 143.1868 | 135.5707 | 123.4468 | 144.2468 | 144.4494 | 134.6146 |
| PV | P2(MW) | 150 | 132.3192 | 115.4219 | 134.2294 | 126.8566 | 144.9157 | 141.7140 | 141.8942 | 116.0735 | 132.8002 |
| PV | P3(MW) | 131.2980 | 143.1461 | 130.8457 | 133.2559 | 144.5088 | 147.7147 | 147.7397 | 132.3366 | 139.4303 | 148.0817 |
| Cost (×105$) | 3.0549 | 2.1744 | 2.8696 | 2.8930 | 3.0038 | 2.6722 | 2.7204 | 2.7844 | 3.1342 | 1.9655 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, J.; Yu, T.; Zhang, X.; Li, Z.; Chen, J. Multi-Searcher Optimization for the Optimal Energy Dispatch of Combined Heat and Power-Thermal-Wind-Photovoltaic Systems. Appl. Sci. 2019, 9, 537. https://doi.org/10.3390/app9030537
Tang J, Yu T, Zhang X, Li Z, Chen J. Multi-Searcher Optimization for the Optimal Energy Dispatch of Combined Heat and Power-Thermal-Wind-Photovoltaic Systems. Applied Sciences. 2019; 9(3):537. https://doi.org/10.3390/app9030537
Chicago/Turabian StyleTang, Jianlin, Tao Yu, Xiaoshun Zhang, Zhuohuan Li, and Junbin Chen. 2019. "Multi-Searcher Optimization for the Optimal Energy Dispatch of Combined Heat and Power-Thermal-Wind-Photovoltaic Systems" Applied Sciences 9, no. 3: 537. https://doi.org/10.3390/app9030537
APA StyleTang, J., Yu, T., Zhang, X., Li, Z., & Chen, J. (2019). Multi-Searcher Optimization for the Optimal Energy Dispatch of Combined Heat and Power-Thermal-Wind-Photovoltaic Systems. Applied Sciences, 9(3), 537. https://doi.org/10.3390/app9030537