State of Charge Estimation of a Lithium Ion Battery Based on Adaptive Kalman Filter Method for an Equivalent Circuit Model


Abstract
1. Introduction
2. The Determination of the Battery Model
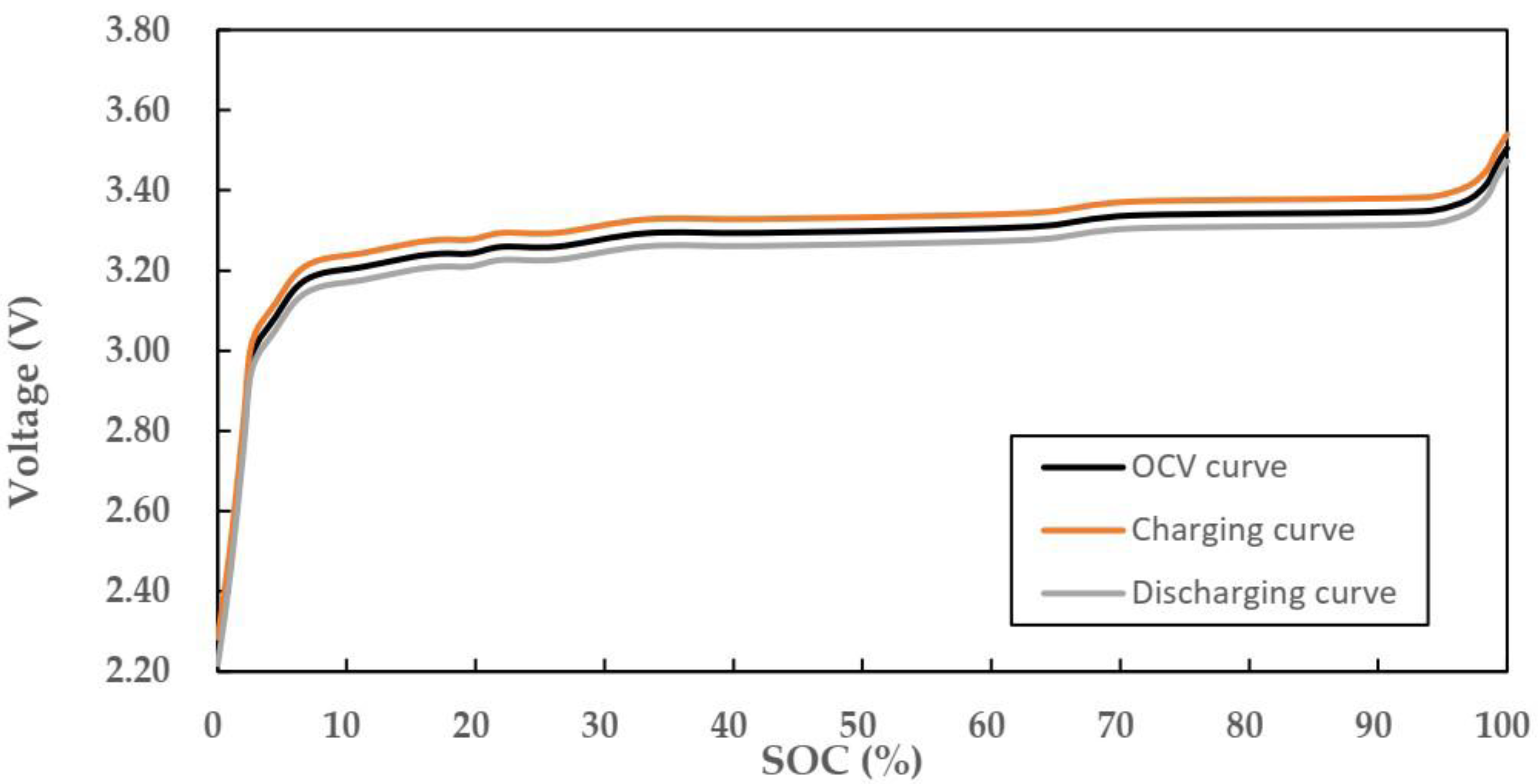
2.1. The SOC-OCV Relationship Curve
- The battery was discharged to the lower limit voltage;
- The battery was charged to the upper limit voltage with a constant charging current, and the charging voltage and the charging capacity were recorded;
- The battery was discharged at a constant discharge current, and the discharge was stopped when the discharge capacity was the same as the charge capacity in step B, and the discharging voltage and the discharging capacity were recorded; and
- Data of the charging voltage and the discharging voltage of the battery relative to the state of charge of the battery were respectively obtained;
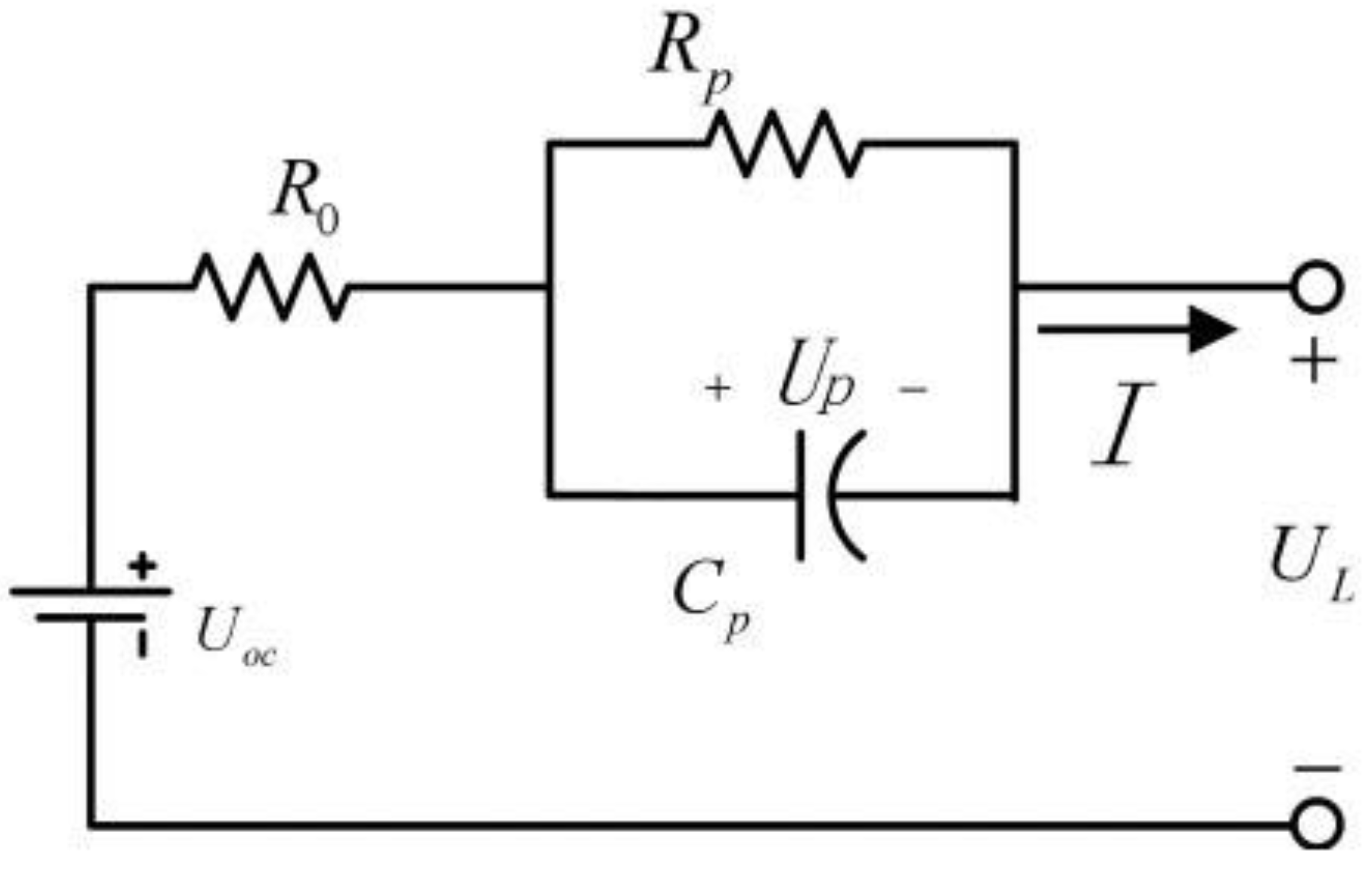
2.2. Battery Model Selection and Parameter Identification
3. The Adaptive SOC Estimation of the Kalman Filter
- Initializing the system state gives an estimate of the initial state of the system x0 and its error covariance P0:
- By iterating the state and the error covariance matrix of the previous moment, the state and error covariance matrix of the next moment can be obtained:
- The Kalman gain matrix Lk is:
- The state error covariance will gradually increase as the uncertainty of the current state increases, resulting in a corresponding increase in the Kalman gain matrix, in order to greatly update the current system state.
- The state and the state covariance matrix at time k will be updated with output error at time k:
- In Equation (15), I is a unit matrix. As the measured value increases, the stability of the state becomes better and better, so the reference value Pk of uncertainty will be continuously reduced.
- The mean and the covariance of process noise and measurement noise will be updated:
4. Simulation and Results Analysis
4.1. Experiments
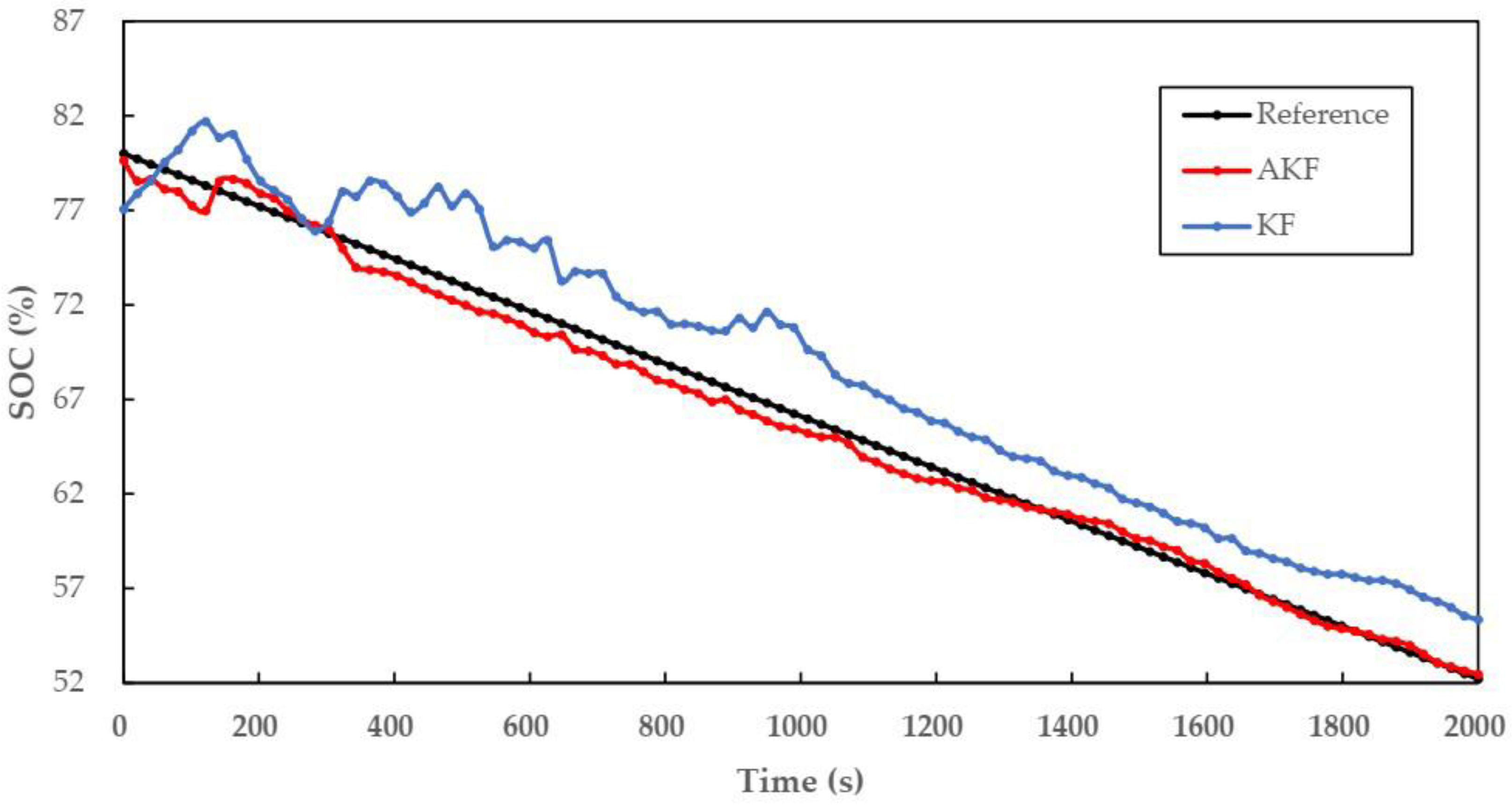
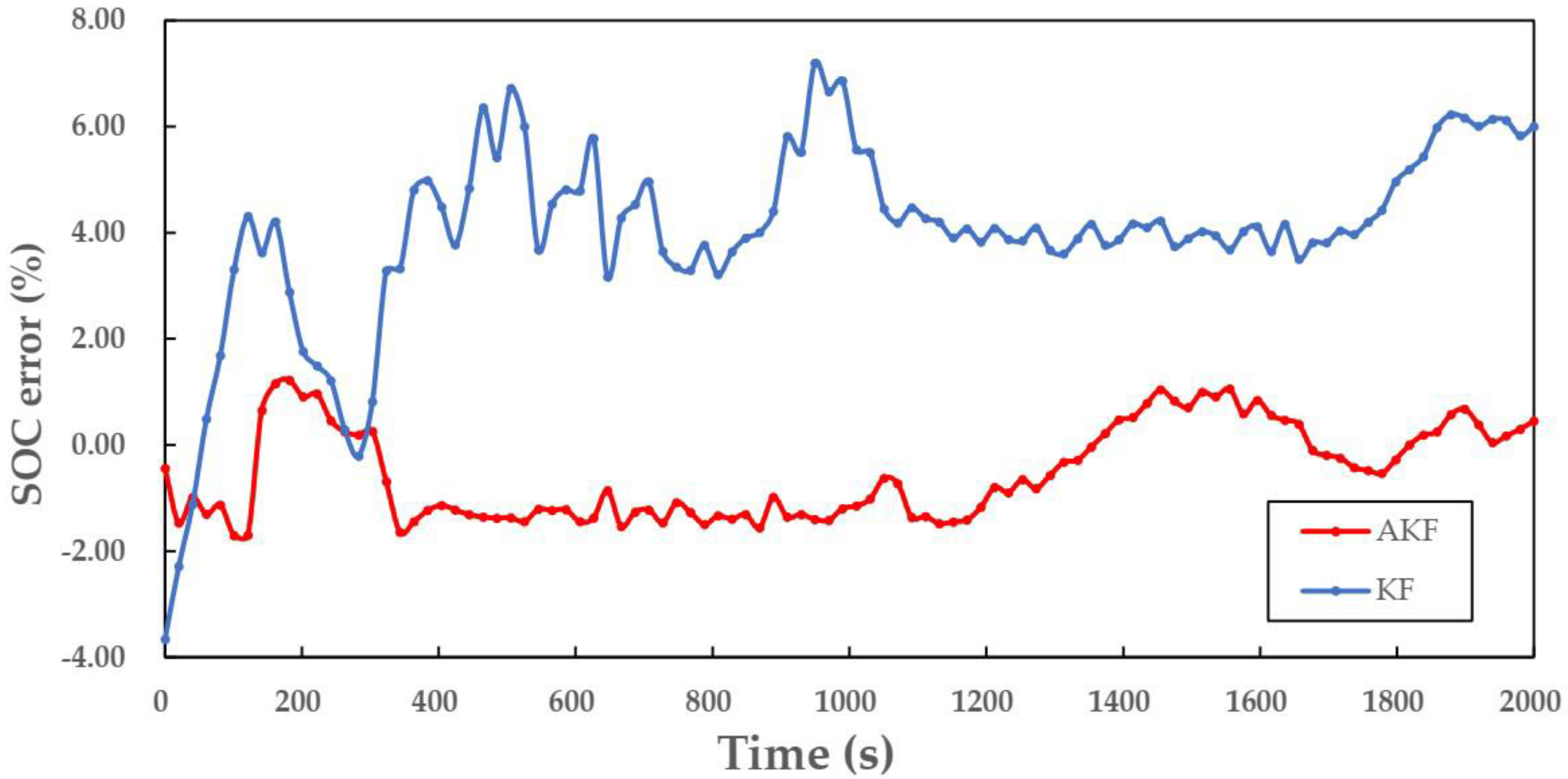
4.2. The Comparative Test under Constant Current Discharge Conditions
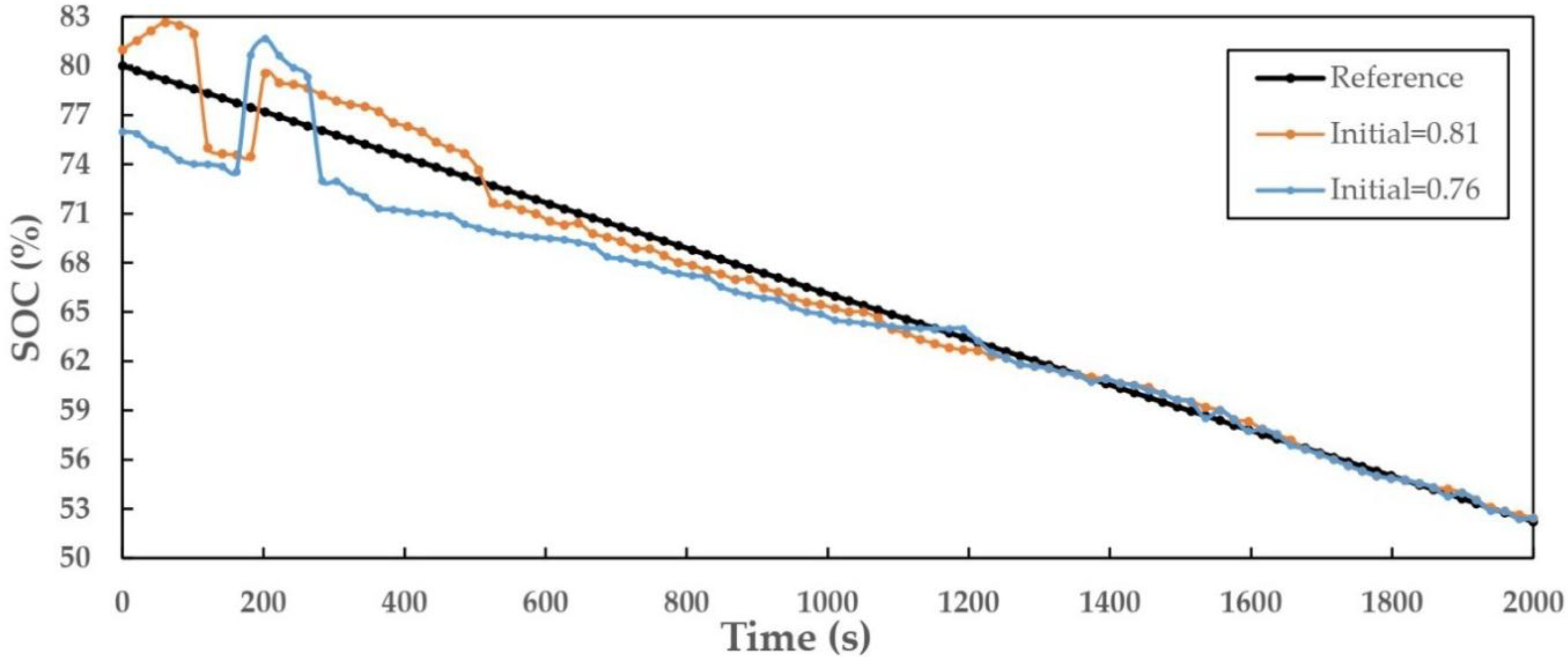
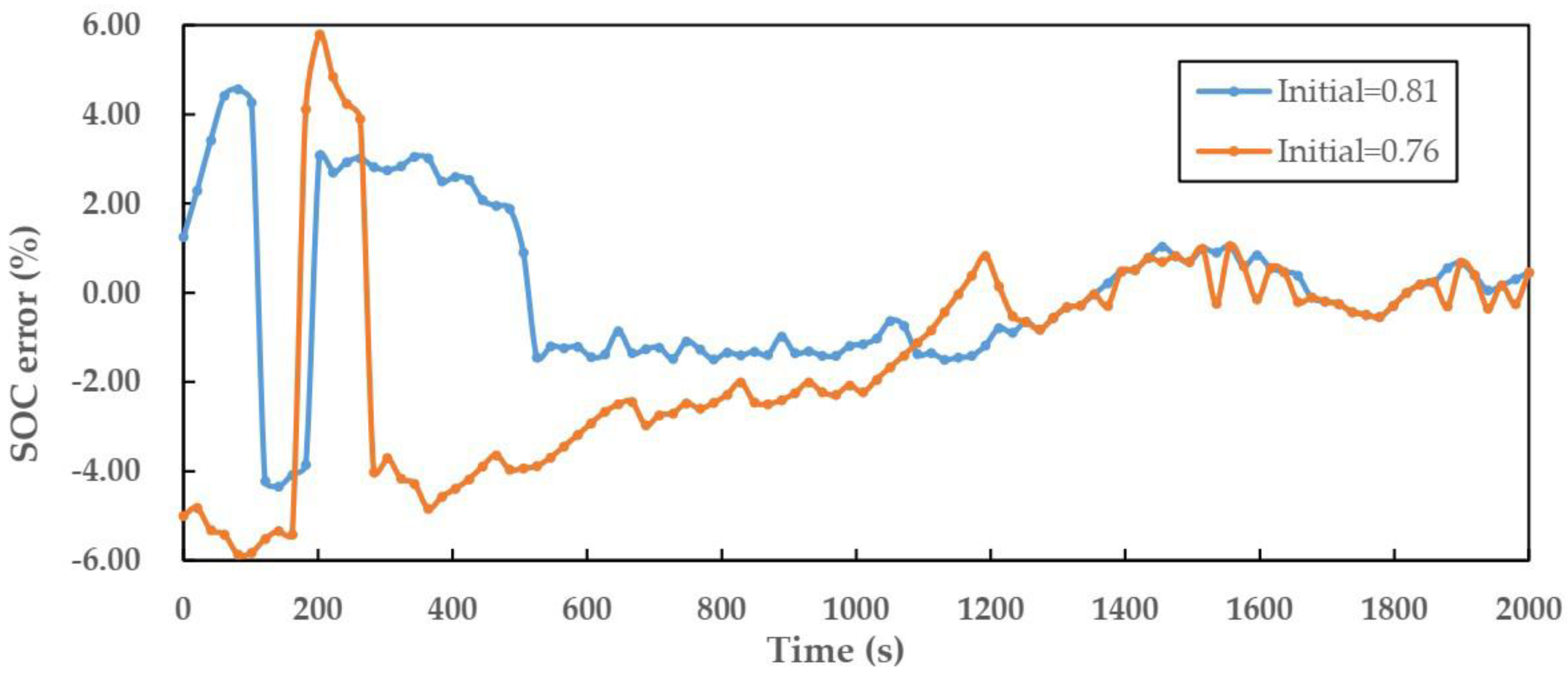
4.3. The Comparative Test for Initial Value Correction
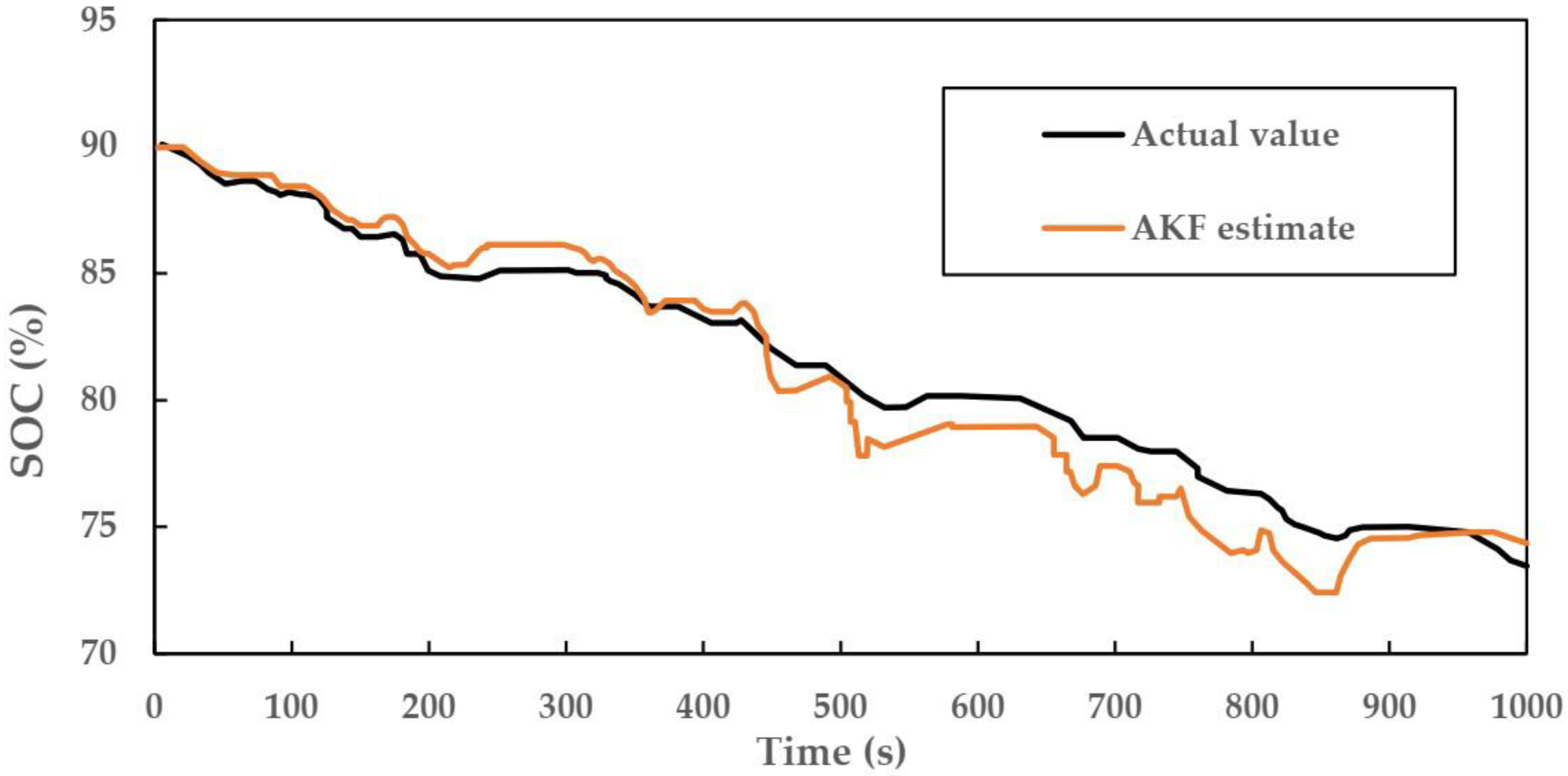
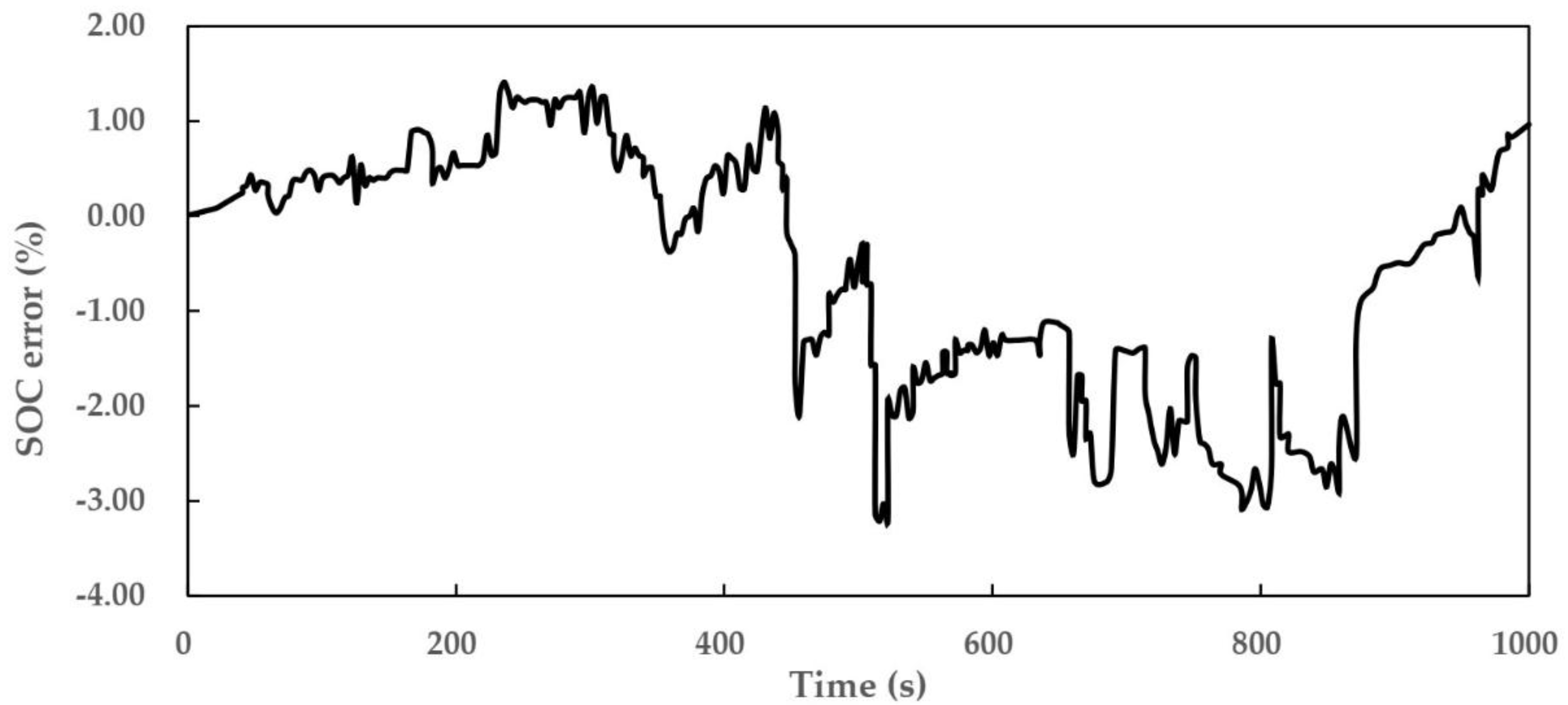
4.4. The Simulation Experiment Based on the BBDST Working Condition
- Charged the battery to the cut-off voltage at a temperature of 25 °C.
- After that, it was discharged with a constant current rate of 1 C to SOC = 0.9, and then allowed to stand for 1 h.
- Performed a complete BBDST test on the lithium-ion battery, then stopped the loading power, and continued to test the lithium-ion battery for a complete BBDST condition after 10 min of static. The above test steps were repeated for achieving 15 complete BBDST condition test cycles.
- Re-discharged the battery at the 1 C rate until the battery was discharged to the cut-off voltage, finally terminated the discharge, and recorded the experimental data.
4.5. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Scrosati, B.; Garche, J. Lithium batteries: Status, prospects and future. J. Power Sources 2010, 195, 2419–2430. [Google Scholar] [CrossRef]
- Capasso, C.; Veneri, O. Experimental analysis on the performance of lithium-based batteries for road full electric and hybrid vehicles. Appl. Energy 2014, 136, 921–930. [Google Scholar] [CrossRef]
- Abada, S.; Marlair, G.; Lecocq, A.; Petit, M.; Sauvant-Moynot, V.; Huet, F. Safety focused modeling of lithium-ion batteries: A review. J. Power Sources 2016, 306, 178–192. [Google Scholar] [CrossRef]
- Fleischhammer, M.; Waldmann, T.; Bisle, G.; Hogg, B.-I.; Wohlfahrt-Mehrens, M. Interaction of cyclic ageing at high-rate and low temperatures and safety in lithium-ion batteries. J. Power Sources 2015, 274, 432–439. [Google Scholar] [CrossRef]
- Perea, A.; Paolella, A.; Dube, J.; Champagne, D.; Mauger, A.; Zaghib, K. State of charge influence on thermal reactions and abuse tests in commercial lithium-ion cells. J. Power Sources 2018, 399, 392–397. [Google Scholar] [CrossRef]
- Liu, D.T.; Li, L.; Song, Y.C.; Wu, L.F.; Peng, Y. Hybrid State of Charge Estimation for Lithium-Ion Battery under Dynamic Operating Conditions. Int. J. Electr. Power Energy Syst. 2019, 110, 48–61. [Google Scholar] [CrossRef]
- Chen, Y.J.; Yang, G.; Liu, X.; He, Z.C. A Time-Efficient and Accurate Open Circuit Voltage Estimation Method for Lithium-Ion Batteries. Energies 2019, 12, 1803. [Google Scholar] [CrossRef]
- Feng, F.; Lu, R.; Zhu, C. A Combined State of Charge Estimation Method for Lithium-Ion Batteries Used in a Wide Ambient Temperature Range. Energies 2014, 7, 3004–3032. [Google Scholar] [CrossRef]
- Liu, Z.; Li, Z.; Zhang, J.; Su, L.; Ge, H. Accurate and Efficient Estimation of Lithium-Ion Battery State of Charge with Alternate Adaptive Extended Kalman Filter and Ampere-Hour Counting Methods. Energies 2019, 12, 757. [Google Scholar] [CrossRef]
- Khumprom, P.; Yodo, N. A Data-Driven Predictive Prognostic Model for Lithium-Ion Batteries based on a Deep Learning Algorithm. Energies 2019, 12, 660. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Li, C.; Xiao, F.; Fan, Y. An Approach to State of Charge Estimation of Lithium-Ion Batteries Based on Recurrent Neural Networks with Gated Recurrent Unit. Energies 2019, 12, 1592. [Google Scholar] [CrossRef]
- Christian, C.; Thomas, H.; Stephen, K.; Andreas, J. A comparative study and review of different Kalman filters by applying an enhanced validation method. J. Energy Storage 2016, 8, 142–159. [Google Scholar]
- Hou, J.; Yang, Y.; He, H.; Gao, T. Adaptive Dual Extended Kalman Filter Based on Variational Bayesian Approximation for Joint Estimation of Lithium-Ion Battery State of Charge and Model Parameters. Appl. Sci. 2019, 9, 1726. [Google Scholar] [CrossRef]
- Sun, Q.; Zhang, H.; Zhang, J.; Ma, W. Adaptive Unscented Kalman Filter with Correntropy Loss for Robust State of Charge Estimation of Lithium-Ion Battery. Energies 2018, 11, 3123. [Google Scholar] [CrossRef]
- Hou, J.; He, H.; Yang, Y.; Gao, T.; Zhang, Y. A Variational Bayesian and Huber-Based Robust Square Root Cubature Kalman Filter for Lithium-Ion Battery State of Charge Estimation. Energies 2019, 12, 1717. [Google Scholar] [CrossRef]
- Liu, X.; Qiao, D.D.; Zheng, Y.J.; Zhou, L. A fuzzy state-of charge estimation algorithm combining Ampere-Hour and an extended Kalman filter for Li-ion Battery based on multi-model global identification. Appl. Sci. 2018, 8, 2028. [Google Scholar] [CrossRef]
- Yu, Q.Q.; Xiong, R.; Wang, L.Y.; Lin, C. A comparative study on open circuit voltage models for lithium-ion batteries. Chin. J. Mech. Eng. 2018, 31, 65–73. [Google Scholar] [CrossRef]
- Sun, D.; Xu, S.; Li, C.; Ji, A.F. Review of state of charge estimation method for Li-ion battery. Battery Bimonthly 2018, 48, 284–287. [Google Scholar]
- Li, Z.; Huang, J.; Liaw, B.Y.; Zhang, J. On state-of-charge determination for lithium-ion batteries. J. Power Sources 2017, 348, 281–301. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Suleman, A.S.; Dennis, D. Rapid test and non-linear model characterization of solid-state lithium-ion batteries. J. Power Sources 2004, 130, 266–274. [Google Scholar]
- Meng, J.H.; Luo, G.Z.; Mattia, R.; Maciej, S. Overview of lithium-ion battery modeling methods for state-of-charge estimation in electrical vehicles. Appl. Sci. 2018, 659, 1–17. [Google Scholar] [CrossRef]
- Ning, J.Q.; Zhang, L.P. Method for Determining SOC-OCV Curve of Lithium Battery. China Patent No. CN104297690A, 21 January 2015. [Google Scholar]
- Wu, B.; Chen, B. Study the performance of battery models for hybrid electric vehicles. In Proceedings of the 2014 IEEE/ASME 10th International Conference on Mechatronic and Embedded Systems and Applications (MESA), Senigallia, Italy, 10–12 September 2014; pp. 1–6. [Google Scholar]
- Rael, S.; Urbain, M.; Renaudineau, H. A mathematical lithium-ion battery model implemented in an electrical engineering simulation software. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 1760–1765. [Google Scholar]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.J.; Sun, T. A comparative study of different equivalent circuit models for estimating state-of-charge of lithium-ion batteries. Electrochim. Acta 2018, 259, 566–577. [Google Scholar] [CrossRef]
- Farmann, A.; Sauer, D.U. Comparative study of reduced order equivalent circuit models for on-board state-of-available-power prediction of lithium-ion batteries in electric vehicles. Appl. Energy 2018, 225, 1102–1122. [Google Scholar] [CrossRef]
- Zhang, C.; Yan, F.W.; Du, C.Q.; Giorgio, R. An improved model-based self-adaptive filter for online state-of-charge estimation of Li-ion batteries. Appl. Sci. 2018, 8, 2084. [Google Scholar] [CrossRef]
- Christopherson, J.P. Battery Test Manual for Electric Vehicles; Idaho National Laboratory: Idaho Falls, ID, USA, 2015. [Google Scholar]
- Ouyang, M.G.; Liu, G.M.; Lu, L.G.; Li, J.Q.; Han, X.B. Enhancing the estimation accuracy in low state-of-charge area: A novel onboard battery model through surface state of charge determination. J. Power Sources 2014, 270, 221–237. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.J.; Zhou, L.; Gao, W.K. Electrical behavior of overdischarge-induced internal short circuit in lithium-ion cells. Electrochim. Acta 2018, 278, 245–254. [Google Scholar] [CrossRef]
- Panchal, S.; Rashid, M.; Long, F.; Mathew, M.; Fraser, R.; Fowler, M. Degradation testing and modeling of 200 ah LiFePO4 battery. In Proceedings of the WCX World Congress Experience, Detroit, MI, USA, 10–12 April 2018. SAE Technical Paper. [Google Scholar]
- Wang, L.M.; Lu, D.; Liu, Q.; Liu, L.; Zhao, X.L. State of charge estimation for LiFePO4 battery via dual extended Kalman filter and charging voltage curve. Electrochim. Acta 2019, 296, 1009–1017. [Google Scholar] [CrossRef]
- Zhang, Z.L.; Cheng, X.; Lu, Z.Y.; Gu, D.J. SOC estimation of lithium-ion batteries with AEKF and wavelet transform matrix. IEEE Trans. Power Electron. 2017, 32, 7626–7634. [Google Scholar] [CrossRef]
- Lai, X.; Qin, C.; Gao, W.K.; Zheng, Y.J.; Yi, W. A state of charge estimator based extended Kalman filter using an electrochemistry-based equivalent circuit model for lithium-ion batteries. Appl. Sci. 2018, 8, 1592. [Google Scholar] [CrossRef]
- Wei, J.W.; Dong, G.Z.; Chen, Z.H.; Kang, Y. System state estimation and optimal energy control framework for multicell lithium-ion battery system. Appl. Energy 2017, 187, 37–49. [Google Scholar] [CrossRef]
- Sun, F.C.; Meng, X.F.; Lin, C.; Wang, Z.P. Dynamic stress test profile of power battery for electric vehicle. Trans. Beijing Inst. Technol. 2010, 30, 297–301. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOC | R0 (mΩ) | Rp (mΩ) | Cp (F) |
|---|---|---|---|
| 1 | 33.0 | 17.2 | 1987.0 |
| 0.975 | 29.2 | 16.2 | 1902.7 |
| 0.95 | 21.6 | 11.0 | 1790.7 |
| 0.925 | 19.3 | 6.5 | 1881.7 |
| 0.9 | 17.1 | 7.3 | 1626.0 |
| 0.8 | 17.1 | 9.3 | 1706.9 |
| 0.7 | 17.0 | 6.1 | 1702.2 |
| 0.6 | 17.3 | 5.9 | 1692.4 |
| 0.5 | 17.6 | 7.2 | 1650.3 |
| 0.4 | 17.7 | 6.2 | 1274.6 |
| 0.3 | 18.0 | 6.6 | 1354.8 |
| 0.2 | 18.4 | 6.7 | 1224.6 |
| 0.1 | 18.6 | 11.4 | 1135.3 |
| Working Condition | Step Time (s) | Cumulative Time (s) | Battery Output Power (kW) |
|---|---|---|---|
| Start | 21 | 21 | 37.5 |
| Accelerating | 12 | 33 | 72.5 |
| Coastdown | 16 | 49 | 4.5 |
| Brake | 6 | 55 | −15 |
| Accelerating | 21 | 76 | 37.5 |
| Coastdown | 16 | 92 | 4.5 |
| Brake | 6 | 98 | −15 |
| Accelerating | 9 | 107 | 72.5 |
| Rapid acceleration | 6 | 113 | 92.5 |
| Uniform speed | 21 | 134 | 37.5 |
| Coastdown | 16 | 150 | 4.5 |
| Brake | 6 | 156 | −15 |
| Accelerating | 9 | 165 | 72.5 |
| Rapid acceleration | 6 | 171 | 92.5 |
| Uniform speed | 21 | 192 | 37.5 |
| Coastdown | 16 | 208 | 4.5 |
| Brake | 9 | 217 | −35 |
| Brake | 12 | 229 | −15 |
| Parking | 71 | 300 | 4.5 |
| Estimation Algorithms | Maximum Absolute Error | Time (s) |
|---|---|---|
| Ampere-hour | 9.49% | 5.951 |
| Two RC KF | 3.46% | 67.326 |
| Fuzzy control | 3.43% | 69.542 |
| Proposed algorithm | 3.47% | 55.756 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, X.; Qiu, D.; Tao, Q.; Zhu, D. State of Charge Estimation of a Lithium Ion Battery Based on Adaptive Kalman Filter Method for an Equivalent Circuit Model. Appl. Sci. 2019, 9, 2765. https://doi.org/10.3390/app9132765
Ma X, Qiu D, Tao Q, Zhu D. State of Charge Estimation of a Lithium Ion Battery Based on Adaptive Kalman Filter Method for an Equivalent Circuit Model. Applied Sciences. 2019; 9(13):2765. https://doi.org/10.3390/app9132765
Chicago/Turabian StyleMa, Xiao, Danfeng Qiu, Qing Tao, and Daiyin Zhu. 2019. "State of Charge Estimation of a Lithium Ion Battery Based on Adaptive Kalman Filter Method for an Equivalent Circuit Model" Applied Sciences 9, no. 13: 2765. https://doi.org/10.3390/app9132765
APA StyleMa, X., Qiu, D., Tao, Q., & Zhu, D. (2019). State of Charge Estimation of a Lithium Ion Battery Based on Adaptive Kalman Filter Method for an Equivalent Circuit Model. Applied Sciences, 9(13), 2765. https://doi.org/10.3390/app9132765