Coupled Vibration Analysis of Submerged Floating Tunnel System in Wave and Current


Abstract
Featured Application
Abstract
1. Introduction
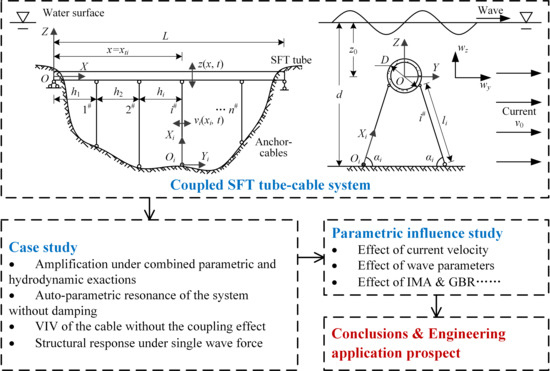
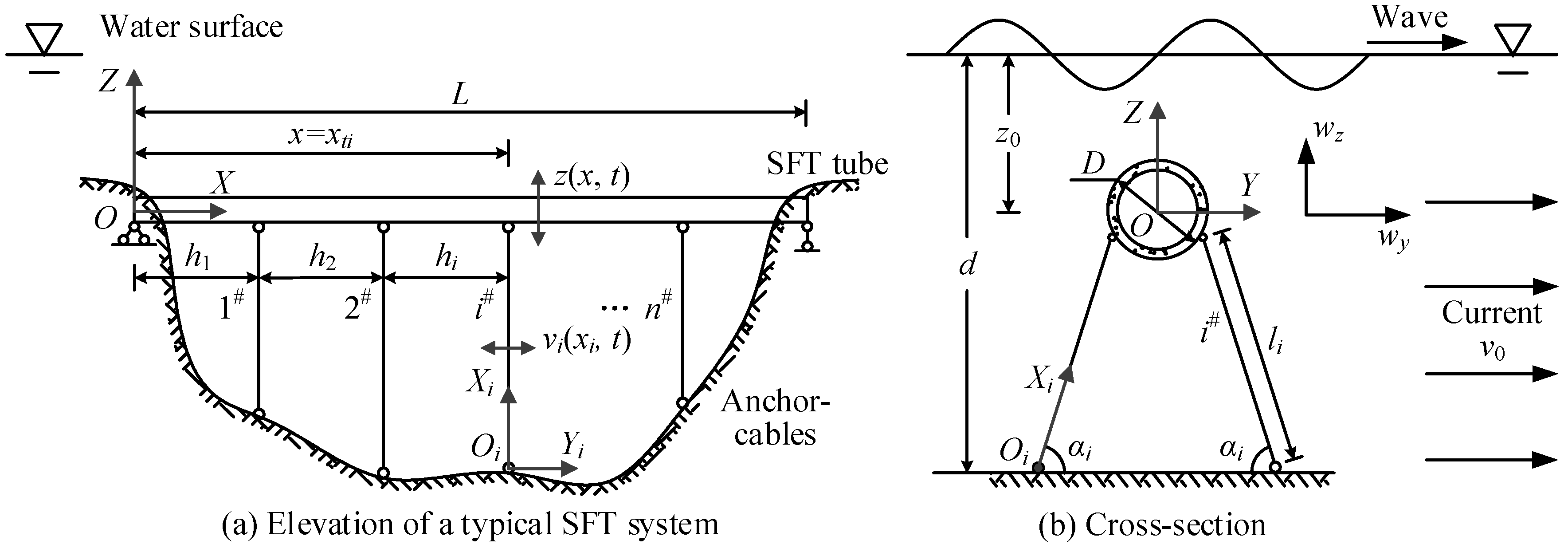
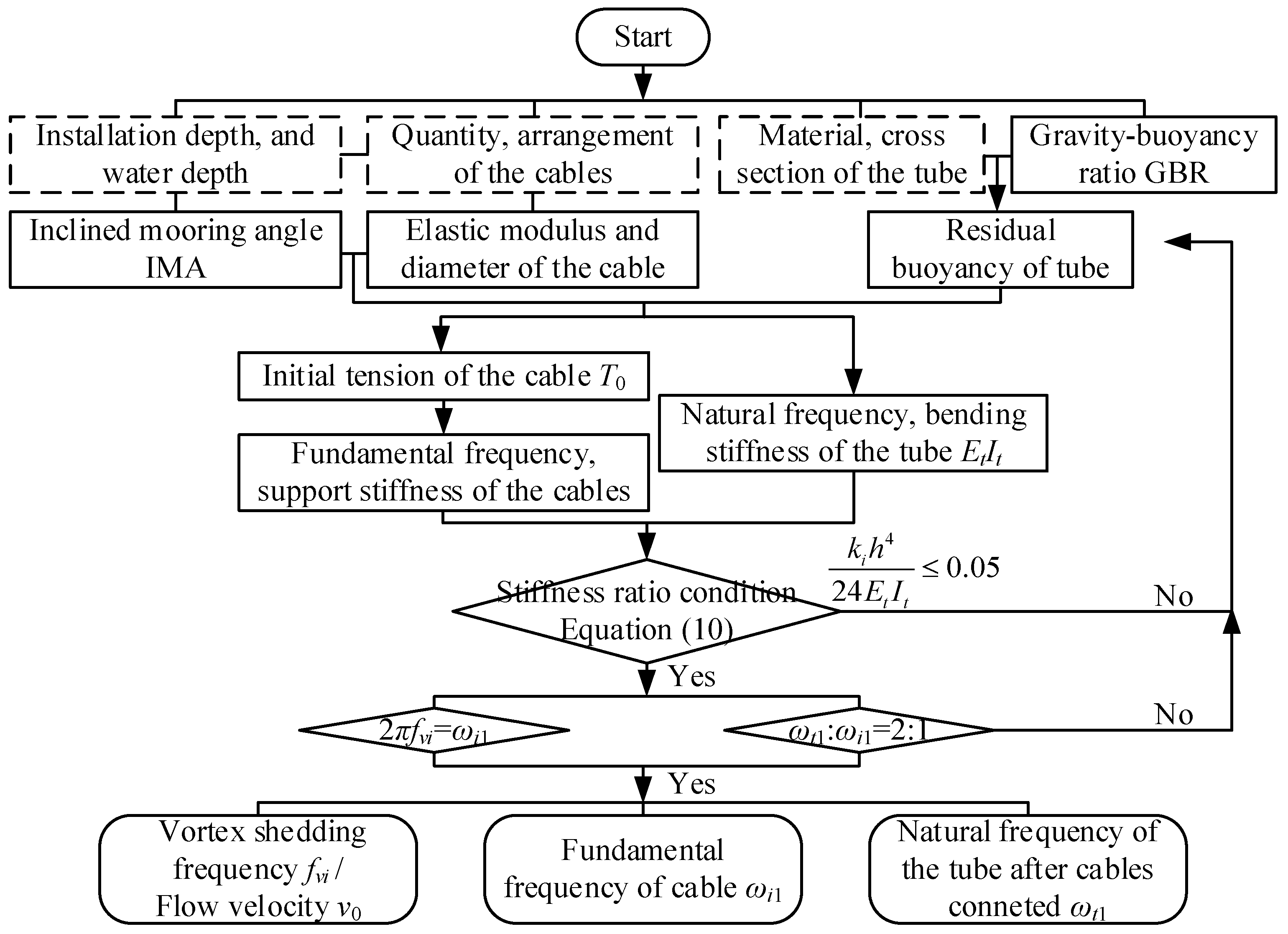
2. Modeling of the SFT System
2.1. Simplified SFT Model
2.2. Governing Equations
2.3. Hydrodynamic Forces on SFT
2.4. Solution of Equations
3. Case Study
3.1. Parameter Values in the Numerical Model
- (1)
- (2)
3.2. Analysis Results
3.2.1. Amplification under Combined Parametric and Hydrodynamic Exactions
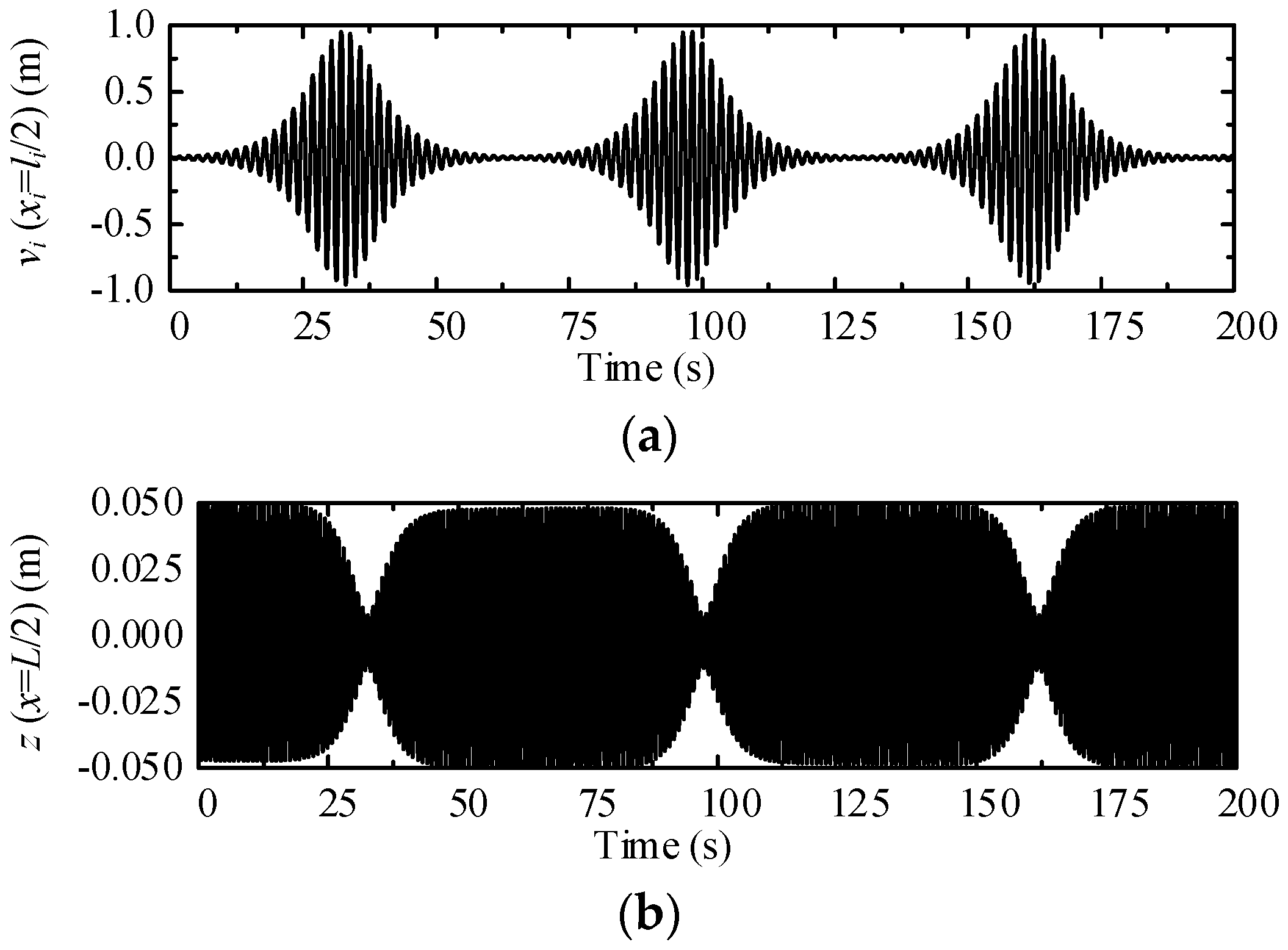
3.2.2. Auto-Parametric Resonance of the System without Damping
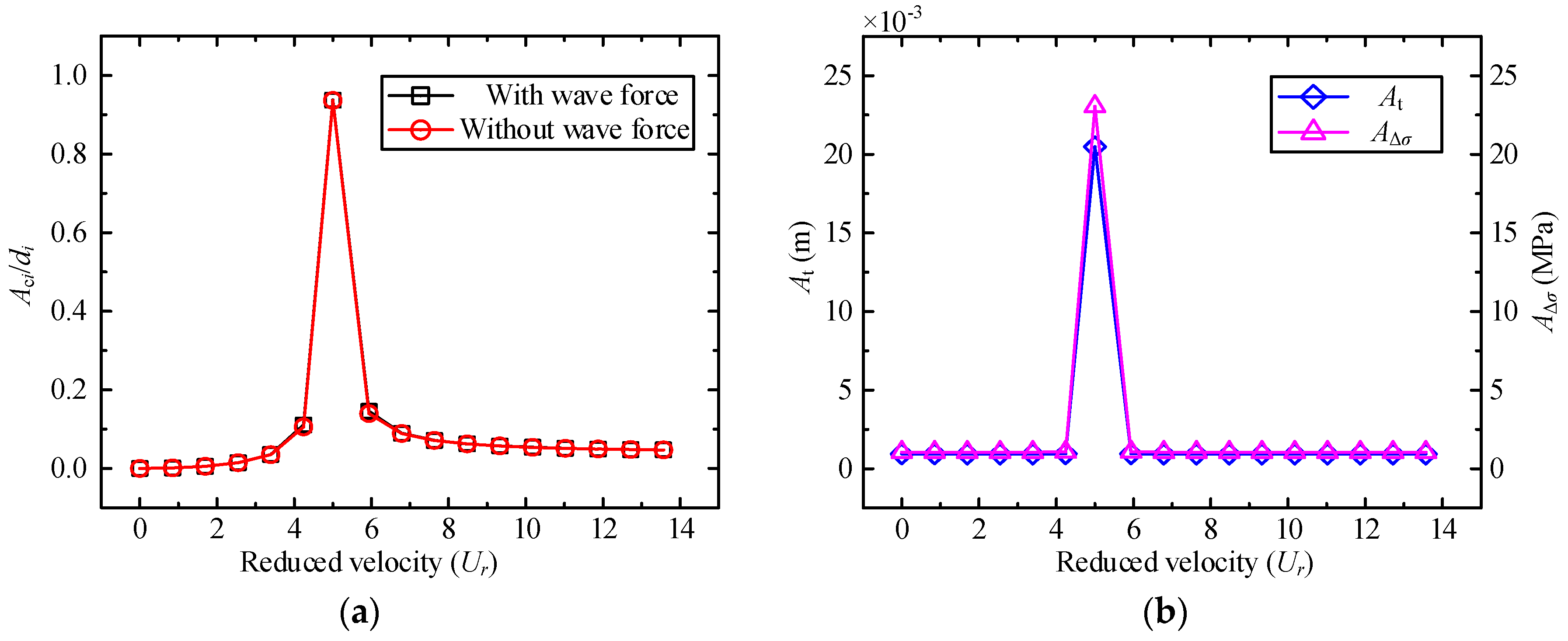
3.2.3. VIV of the Cable without the Coupling Effect
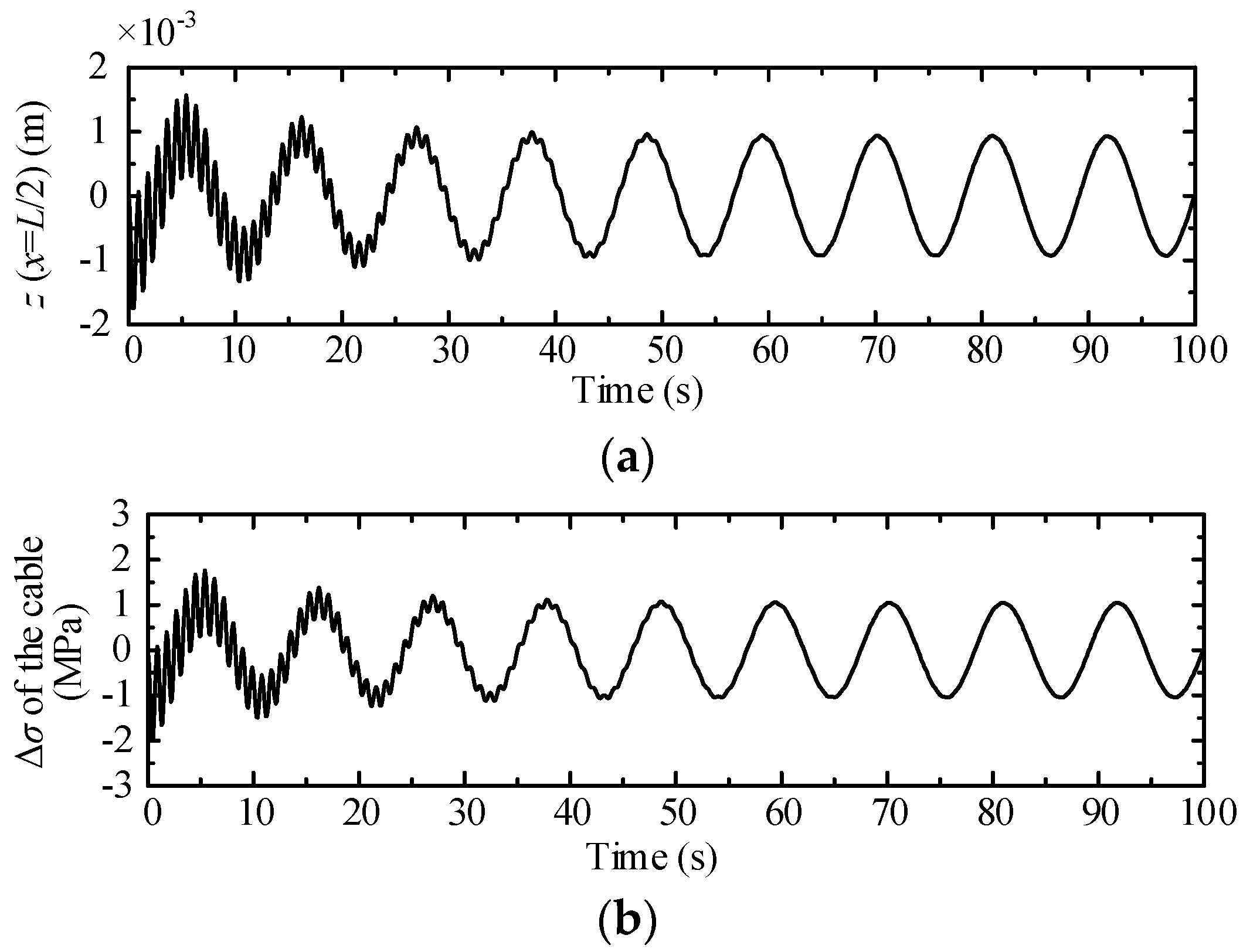
3.2.4. Structural Response under Single Wave Force
4. Parametric Influence Study
4.1. Effect of Current Velocity
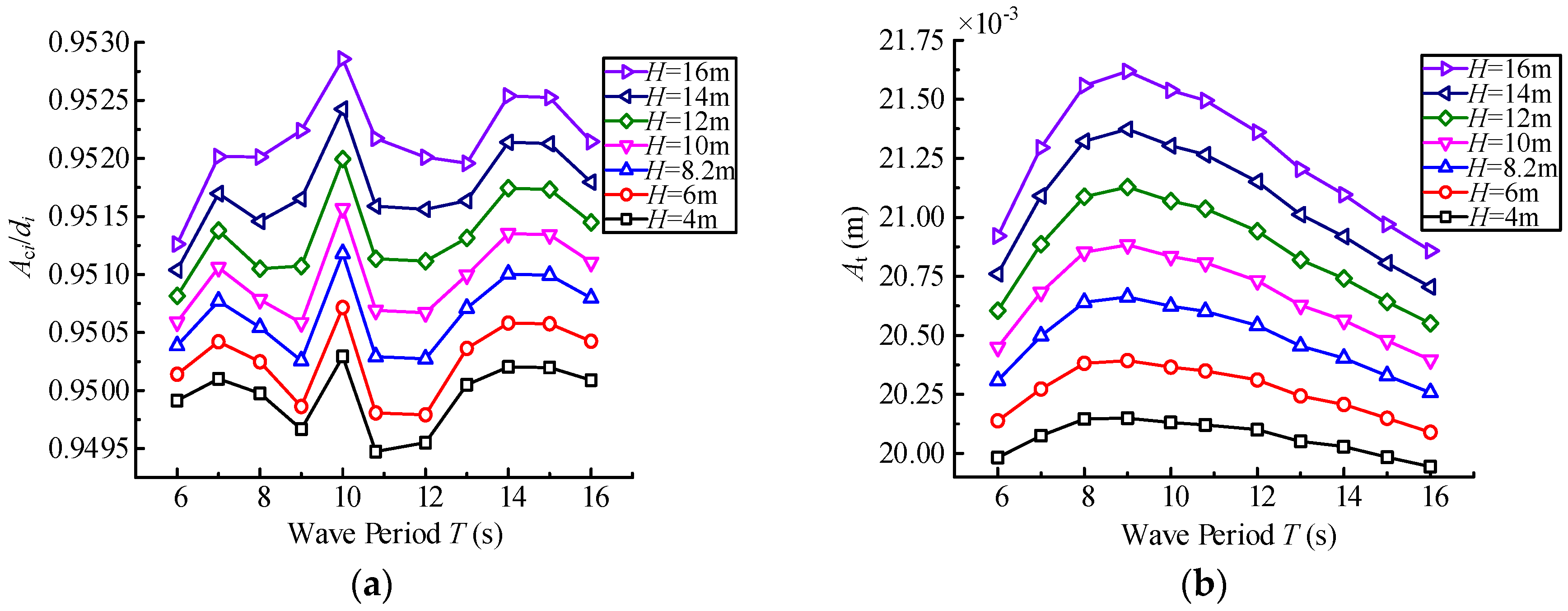
4.2. Effect of Wave Parameters
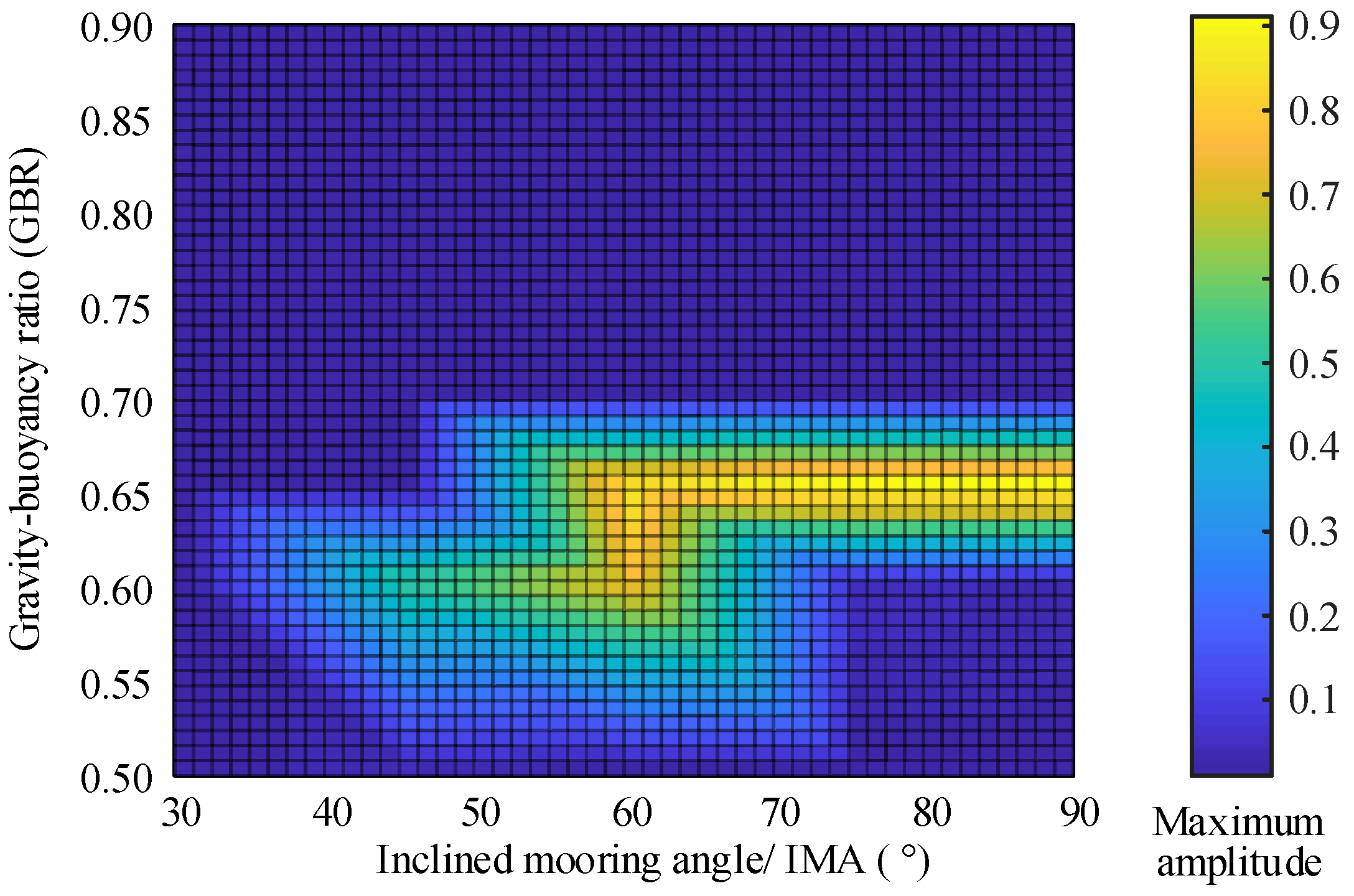
4.3. Effect of Fundamental Structural Parameters
4.4. Effect of Tube Installation Depth
5. Conclusions
- (1)
- When the fundamental frequency of the cables reaches one-half that of the tube (i.e., ωt1:ωi1 = 2:1), the autoparametric resonance of the SFT system is significant, which is more adverse to the cable.
- (2)
- VIV of the anchor-cables can excite the resonance of the tube-cable system. Although the coupling effect of the system suppresses the lateral displacement of the cables to some degree, the VIV of the cables may stimulate the vibration of the tube body, which leads to a significant tension variation in the cables.
- (3)
- The displacement amplitude of SFT is very sensitive to the change of the uniform flow velocity. When the flow velocity v0 = 1.18 m/s (reduced velocity Ur = 5.00), the displacement amplitude of the cables reaches its maximum.
- (4)
- Vibration frequency of the tube and cable is simultaneously decided by GBR and IMA. The parametric vibration of the system is more sensitive to the changes in GBR. Based on the case study, IMA is recommended at around 45°, and a reasonable GBR should be greater than 0.7.
- (5)
- The displacement of the structure increases with the increase in the wave height. The amplitude of the tube is maximized when the wave period is about 9 s. Meanwhile, in the practical engineering, we can reduce the impact of the wave force by properly increasing the underwater installation depth of the SFT.
Author Contributions
Funding
Conflicts of Interest
References
- Østlid, H. When is SFT competitive? Procedia Eng. 2010, 4, 3–11. [Google Scholar] [CrossRef]
- Xiang, Y.; Yang, Y. Challenge in Design and Construction of Submerged Floating Tunnel and State-of-art. Procedia Eng. 2016, 166, 53–60. [Google Scholar] [CrossRef]
- Martinelli, L.; Domaneschi, M.; Shi, C. Submerged Floating Tunnels under Seismic Motion: Vibration Mitigation and Seaquake effects. Procedia Eng. 2016, 166, 229–246. [Google Scholar] [CrossRef]
- Remseth, S.; Leira, B.J.; Okstad, K.M.; Mathisen, K.M.; Haukås, T. Dynamic response and fluid/structure interaction of submerged floating tunnels. Comput. Struct. 1999, 72, 659–685. [Google Scholar] [CrossRef]
- Paik, I.Y.; Oh, C.K.; Kwon, J.S.; Chang, S.P. Analysis of wave force induced dynamic response of submerged floating tunnel. KSCE J. Civ. Eng. 2004, 8, 543–550. [Google Scholar] [CrossRef]
- Mazzolani, F.M.; Landolfo, R.; Faggiano, B.; Esposto, M.; Perotti, F.; Barbella, G. Structural Analyses of the Submerged Floating Tunnel Prototype in Qiandao Lake (PR of China). Adv. Struct. Eng. 2008, 11, 439–454. [Google Scholar] [CrossRef]
- Kunisu, H. Evaluation of wave force acting on Submerged Floating Tunnels. Procedia Eng. 2010, 4, 99–105. [Google Scholar] [CrossRef]
- Long, X.; Ge, F.; Wang, L.; Hong, Y. Effects of fundamental structure parameters on dynamic responses of submerged floating tunnel under hydrodynamic loads. Acta Mech. Sin. 2009, 25, 335–344. [Google Scholar] [CrossRef]
- Long, X.; Ge, F.; Hong, Y. Feasibility study on buoyancy–weight ratios of a submerged floating tunnel prototype subjected to hydrodynamic loads. Acta Mech. Sin. 2015, 31, 750–761. [Google Scholar] [CrossRef]
- Seo, S.; Mun, H.; Lee, J.; Kim, J. Simplified analysis for estimation of the behavior of a submerged floating tunnel in waves and experimental verification. Mar. Struct. 2015, 44, 142–158. [Google Scholar] [CrossRef]
- Muhammad, N.; Ullah, Z.; Choi, D.-H. Performance Evaluation of Submerged Floating Tunnel Subjected to Hydrodynamic and Seismic Excitations. Appl. Sci. 2017, 7, 1122. [Google Scholar] [CrossRef]
- Blevins, R.D. Flow-Induced Vibration, 2nd ed.; Van Nostrand Reinhold Co.: New York, NY, USA, 1990. [Google Scholar]
- Chen, W.; Li, M.; Guo, S.; Gan, K. Dynamic analysis of coupling between floating top-end heave and riser’s vortex-induced vibration by using finite element simulations. Appl. Ocean Res. 2014, 48, 1–9. [Google Scholar] [CrossRef]
- Yuan, Y.; Xue, H.; Tang, W. A numerical investigation of Vortex-Induced Vibration response characteristics for long flexible cylinders with time-varying axial tension. J. Fluids Struct. 2018, 77, 36–57. [Google Scholar] [CrossRef]
- Franzini, G.R.; Pesce, C.P.; Salles, R.; Gonçalves, R.T.; Fujarra, A.L.C.; Mendes, P. Experimental Analysis of a Vertical and Flexible Cylinder in Water: Response to Top Motion Excitation and Parametric Resonance. J. Vib. Acoust. 2015, 137, 031010. [Google Scholar] [CrossRef]
- Sun, S.; Su, Z. Parametric vibration of submerged floating tunnel tether under random excitation. China Ocean Eng. 2011, 25, 349–356. [Google Scholar] [CrossRef]
- Wu, Z.; Mei, G. Dynamic Response Analysis of Cable of Submerged Floating Tunnel under Hydrodynamic Force and Earthquake. Shock Vib. 2017, 2017, 3670769. [Google Scholar] [CrossRef]
- Wu, Z.; Ni, P.; Mei, G. Vibration response of cable for submerged floating tunnel under simultaneous hydrodynamic force and earthquake excitations. Adv. Struct. Eng. 2018. [Google Scholar] [CrossRef]
- Xiang, Y.; Chao, C. Vortex-Induced Dynamic Response Analysis for the Submerged Floating Tunnel System under the Effect of Currents. J. Waterw. Port Coastal Ocean Eng. 2013, 139, 183–189. [Google Scholar]
- Cantero, D.; Rønnquist, A.; Naess, A. Recent Studies of Parametrically Excited Mooring Cables for Submerged Floating Tunnels. Procedia Eng. 2016, 166, 99–106. [Google Scholar] [CrossRef]
- Cantero, D.; Rønnquist, A.; Naess, A. Tension during parametric excitation in submerged vertical taut tethers. Appl. Ocean Res. 2017, 65, 279–289. [Google Scholar] [CrossRef]
- Xiang, Y.; Zhang, K. The layered integrating method for calculating wave force of submerged floating tunnel based on Morison equation. J. Zhejiang Univ. Eng. Sci. 2011, 45, 1399–1404. [Google Scholar]
- Sato, M.; Kanie, S.; Mikami, T. Mathematical analogy of a beam on elastic supports as a beam on elastic foundation. Appl. Math. Model. 2008, 32, 688–699. [Google Scholar] [CrossRef]
- Xiang, Y.; Chen, Z.; Yang, Y.; Lin, H.; Zhu, S. Dynamic response analysis for submerged floating tunnel with anchor-cables subjected to sudden cable breakage. Mar. Struct. 2018, 59, 179–191. [Google Scholar] [CrossRef]
- Williamson, C.H.K.; Govardhan, R. A brief review of recent results in vortex-induced vibrations. J. Wind Eng. Ind. Aerodyn. 2008, 96, 713–735. [Google Scholar] [CrossRef]
- Wu, X.; Ge, F.; Hong, Y. A review of recent studies on vortex-induced vibrations of long slender cylinders. J. Fluids Struct. 2012, 28, 292–308. [Google Scholar] [CrossRef]
- Clough, R.W.; Penzien, J.; Griffin, D.S. Dynamics of Structures, 2nd ed.; McGraw-Hill: New York, NY, USA, 1993. [Google Scholar]
- Zhang, M.; Fu, S.; Song, L.; Tang, X.; He, Y. A time domain prediction method for the vortex-induced vibrations of a flexible riser. Mar. Struct. 2018, 59, 458–481. [Google Scholar] [CrossRef]
- Gopalkrishnan, R. Vortex-Induced Forces on Oscillating Bluff Cylinders. Ph.D. Thesis, MIT, Cambridge, MA, USA, 1993. [Google Scholar]
- Kaneko, S.; Nakamura, T.; Inada, F. Flow-Induced Vibrations: Classifications and Lessons from Practical Experiences, 2nd ed.; Academic Press: Oxford, UK, 2013. [Google Scholar]
- Su, Z.; Sun, S. Seismic response of submerged floating tunnel tether. China Ocean Eng. 2013, 27, 43–50. [Google Scholar] [CrossRef]
- Seo, S.; Sagong, M.; Son, S. Global response of submerged floating tunnel against underwater explosion. KSCE J. Civ. Eng. 2015, 19, 2029–2034. [Google Scholar] [CrossRef]
- Tagata, G. Harmonically forced, finite amplitude vibration of a string. J. Sound Vib. 1977, 51, 483–492. [Google Scholar] [CrossRef]
- Lu, W.; Ge, F.; Wang, L.; Wu, X.; Hong, Y. On the slack phenomena and snap force in tethers of submerged floating tunnels under wave conditions. Mar. Struct. 2011, 24, 358–376. [Google Scholar] [CrossRef]
- Lin, H.; Xiang, Y.; Yang, Y. Coupled Vibration Analysis of CFRP Cable-tube System under Parametric Excitation in Submerged Floating Tunnel. Procedia Eng. 2016, 166, 45–52. [Google Scholar] [CrossRef]
- JTS 145-2-2013. Code of Hydrology for Sea Harbor; Ministry of Transport of the People’s Republic of China: Beijing, China, 2013.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Parameter | Symbol | Value |
|---|---|---|---|
| The i# pair of cables | Length | li | 161.11 m |
| Diameter | di | 0.424 m | |
| Mass per unit length | mci | 1108.39 kg/m | |
| Elastic modulus | Ei | 2.1 × 1011 Pa | |
| Initial tension | T0 | 4.04 × 107 N | |
| Inclined mooring angle | αi | 90° | |
| Damping ratio | ξi1 | 0.0018 | |
| Fundamental frequency | ωi1 | 3.493 rad/s | |
| Tunnel tube | Length | L | 150 m |
| Outside diameter | D | 20 m | |
| Mass per unit length | mt | 2.04 × 105 kg/m | |
| Flexural rigidity | It | 2701 m4 | |
| Elastic modulus | Et | 3.45 × 1010 Pa | |
| Gravity-buoyancy ratio | η | 0.65 | |
| Damping ratio | ξt1 | 0.01 | |
| Fundamental frequency | ωt1 | 6.986 rad/s | |
| Hydrodynamic environment | Density | ρw | 1000 kg/m3 |
| Flow velocity | v0 | 1.18 m/s | |
| Installation depth | z0 | −20 m | |
| Water depth | d | 190 m | |
| Wave Height | H | 8.2 m | |
| Wave Period | T | 10.8 s |
| Items | With Wave Force | Without Wave Force | Relative Difference (Based on Results without Wave Force) |
|---|---|---|---|
| Cable amplitude/m | 0.402 | 0.402 | →0 |
| Tube amplitude/m | 0.0185~0.0206 | 0.0194 | −4.64%~+6.19% |
| Cable stress variation/MPa | 20.675~23.076 | 22.061 | −6.28%~+4.60% |
| Items | With Coupling | Without Coupling | Relative Difference (Based on Results without Coupling) |
|---|---|---|---|
| Cable amplitude/m | 0.402 | 0.668 | −39.82% |
| Tube amplitude/m | 0.0185~0.0206 | — | — |
| Cable stress variation/MPa | 20.675~23.076 | 0.058 | —(very large) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Xiang, Y.; Lin, H.; Yang, Y. Coupled Vibration Analysis of Submerged Floating Tunnel System in Wave and Current. Appl. Sci. 2018, 8, 1311. https://doi.org/10.3390/app8081311
Chen Z, Xiang Y, Lin H, Yang Y. Coupled Vibration Analysis of Submerged Floating Tunnel System in Wave and Current. Applied Sciences. 2018; 8(8):1311. https://doi.org/10.3390/app8081311
Chicago/Turabian StyleChen, Zhengyang, Yiqiang Xiang, Heng Lin, and Ying Yang. 2018. "Coupled Vibration Analysis of Submerged Floating Tunnel System in Wave and Current" Applied Sciences 8, no. 8: 1311. https://doi.org/10.3390/app8081311
APA StyleChen, Z., Xiang, Y., Lin, H., & Yang, Y. (2018). Coupled Vibration Analysis of Submerged Floating Tunnel System in Wave and Current. Applied Sciences, 8(8), 1311. https://doi.org/10.3390/app8081311