5.1. Numerical Analysis by FAST and WAMIT
The floating offshore wind turbine is mainly subjected to wave, wind and mechanical loads, which is a highly nonlinear dynamic system. For the high fidelity modeling and analysis of FOWT-SFFC, the coupled aero-hydro-servo-elastic time domain analysis method is adopted using FAST [
44] and WAMIT [
42]. FAST is NREL’s primary computer-aided engineering (CAE) tool for simulating the coupled dynamic response of horizontal axis wind turbines. It synthesizes aerodynamics models, hydrodynamics models, control and electrical system (servo) dynamics models, and structural (elastic) dynamics models to enable coupled nonlinear aero-hydro-servo-elastic simulation in the time domain [
47].
The aerodynamic loads are calculated with the blade element momentum (BEM) theory, while the mooring loads are calculated using the quasi-static method. To calculate the hydrodynamic loads, the linear hydrostatic restoring forces, added mass and damping contributions from linear wave radiation, incident wave excitation from linear diffraction in regular or irregular seas and nonlinear viscous drag forces from incident wave kinematics and cage motions are considered. In the present study, a hybrid model is adopted, in which both potential-flow theory and Morison’s equation are taken into account to calculate the fluid forces. The WAMIT output files of hydrostatic and hydrodynamic coefficients are called by FAST and the inverse fast Fourier transform is invoked to perform frequency-to-time-domain transforms. The nonlinear viscous drag forces are modeled through Morison’s elements. The drag force on the copper alloy nets is ignored as the hydrodynamic forces on columns and pontoons account for almost all wave loads on fishing cage. However, to reflect the viscous damping of the copper alloy nets, an additional linear damping matrix is added into the input file of HydroDyn which is a time-domain hydrodynamics module embedded in FAST.
5.2. Environmental Conditions and Load Cases
The northwest South China Sea is a potential region for FOWT-SFFC to be commissioned. The location is
,
with a water depth of 150 m, southeast of Hainan Island, as depicted in
Figure 7.
The significant wave heights, mean wave periods, and 10-min mean wind speeds at 10 m used in this study are downloaded from the public dataset ERA-Interim [
48] which is a re-analysis project of European Centre for Medium-Range Weather Forecasts. The temporal range of ERA is from 00:00 1 January 1979 to 18:00 31 December 2017 with time resolution of 6 h and the number of data points is 56,980. It should be noted that the downloaded data only contains mean wave periods T
1 rather than zero-up-crossing periods Tz or peak wave periods Tp. In this paper Tp is derived according to the relationship with T
1 [
46].
To investigate the performance of FOWT-SFFC under wave and wind, three load cases (LC) are analyzed (
Table 7). LC1 is a steady wind field with calm water, used to investigate the resisting overturning ability of the system. Considering that the wind thrust reaches the maximum value at the rated wind speed, the rated wind velocity V = 11.4 m/s at hub height is utilized in this load case. LC2 and LC3 are extreme load cases. It is conservatively assumed that in LC2 the extreme 10-min mean wind speed with 1-year recurrence period occurs during the sea state of 1-year extreme significant wave height. In LC3, the combination of 50-year extreme 10-min wind speed and the 50-year extreme significant wave height is employed [
49]. All extrema are derived from the Gumbel model [
46] with standard deviation
and mean
where
U and
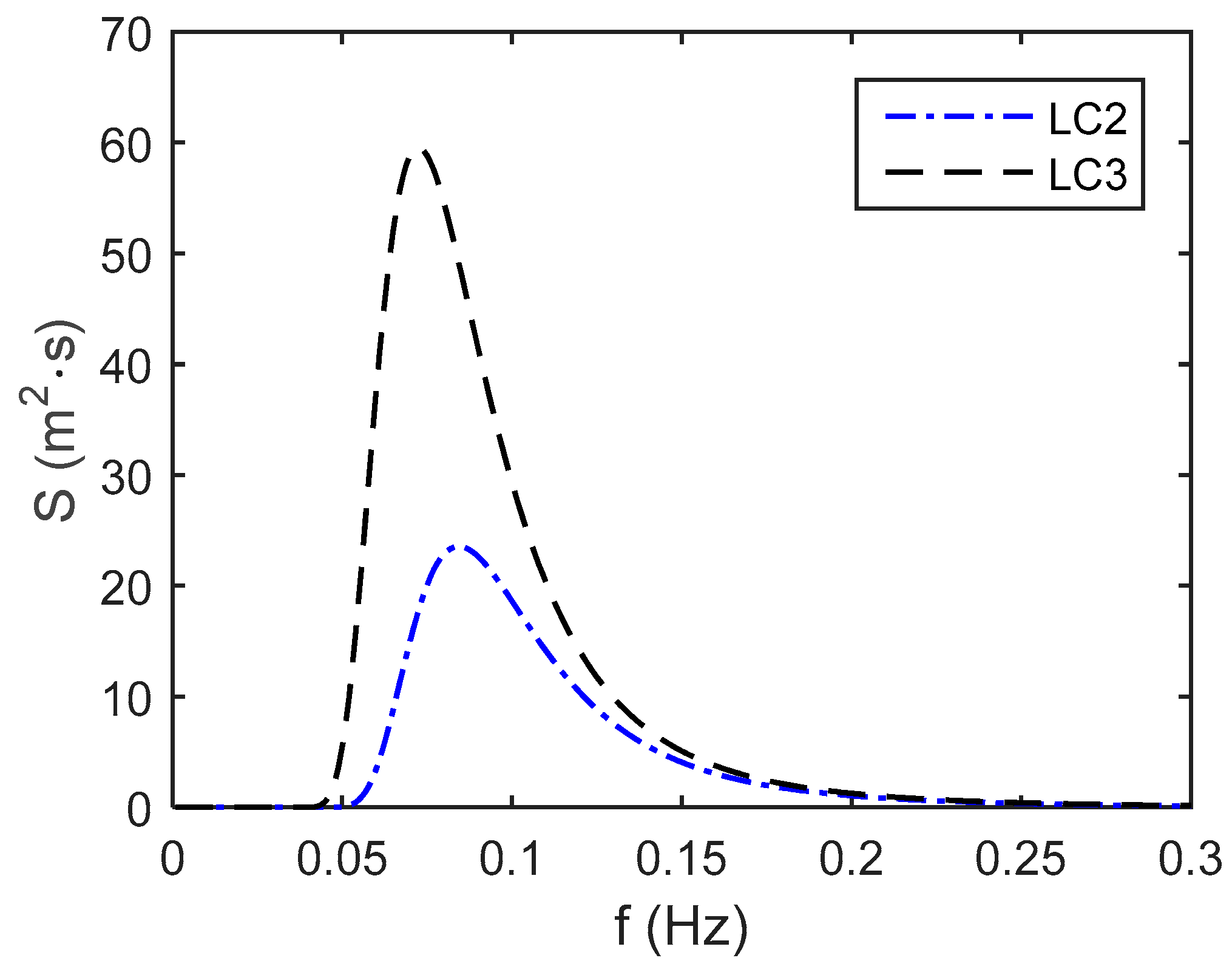
A are fitted Gumbel parameters of the downloaded site data. The irregular ocean waves are assumed to follow a Pierson-Moskowitz spectrum [
46]. The mean wave periods corresponding to the 1-year and 50-year extreme sea states are determined by the conditional distribution model [
50]. The Pierson-Moskowitz spectra used in LC2 and LC3 are shown in
Figure 8. The linear random wave elevation and kinematics are generated by FAST.
5.4. Extreme Load Cases
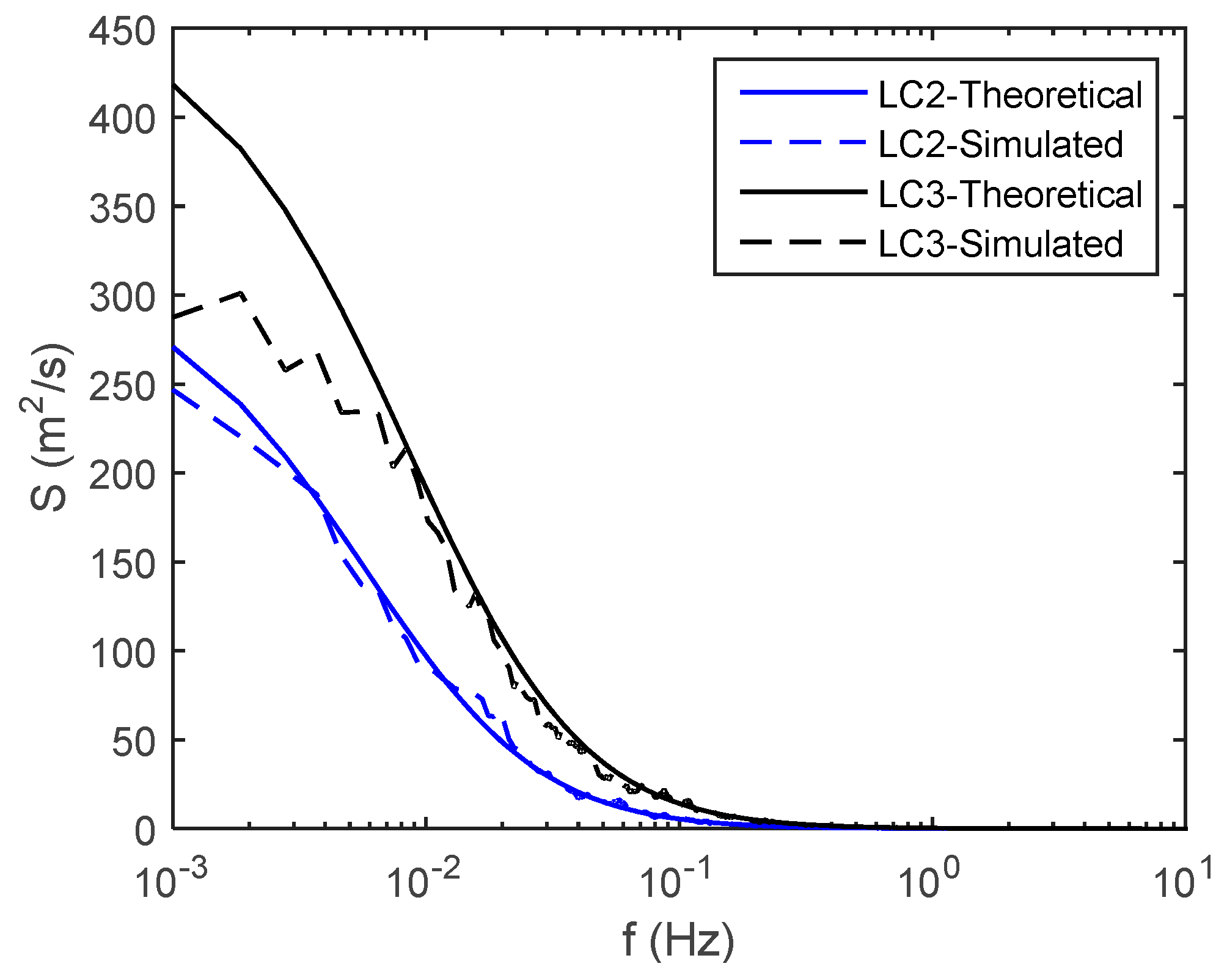
In extreme load cases LC2 and LC3, the wind conditions are modeled by a turbulence model, and wind profiles are assumed to have a power law profile. Kaimal wind spectrum model [
51] is used to represent the turbulence model. Both extreme wind conditions in LC2 and LC3 have a turbulence intensity of 11% and a power law exponent of 0.11 [
51]. The theoretical and FAST simulated Kaimal spectra at hub height of FOWT-SFFC in LC2 and LC3 are given in
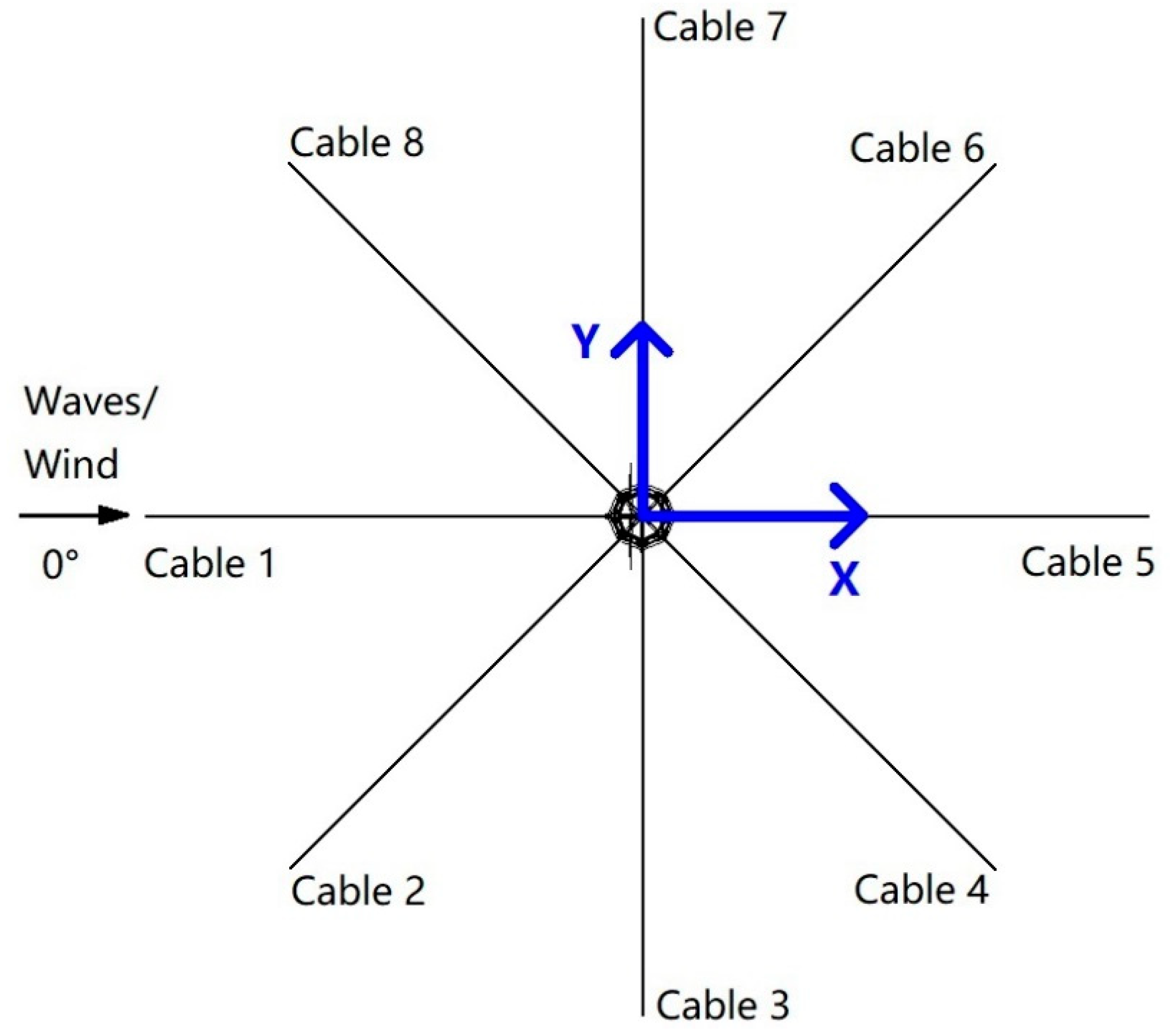
Figure 9. Besides, the wind and wave directions are assumed in line with the positive direction of axis
X. In load case LC3, the mean wind speed at hub height is 28.556 m/s for FOWT-SFFC and 28.397 m/s for OC3Hywind and OC4DeepCwind, beyond the cut-out wind speed of NREL-5 MW wind turbine. As a result, the turbine has entered the parked state. Rather than initializing the blade-pitch angles to equal feathered pitch (90 degrees), the initial blade-pitch angles are set to be zeros in this parked state for the most unfavorable condition. The stochastic response in LC2 and LC3 are simulated in FAST with a time length of 11,200 s and time step of 0.0125 s. The first 400 s time history of turbine run-up is truncated. The statistical and spectral analyses are based on 3-h time duration between 400 s and 11,200 s. The response in this duration can be regarded as stationary.
Statistical quantities of foundation surge, heave and pitch motions as well as the stresses at tower base of three concepts of offshore wind turbines under LC2 and LC3 are displayed in
Table 9 and
Table 10.
Noticeably, in both LC2 and LC3, the surge, heave and pitch motions of FOWT-SFFC are significantly lower than those of OC3Hywind and OC4DeepCwind. In particular, the maximum surge of FOWT-SFFC is only about 26% of the OC3Hywind wind turbine in LC3. Even using the ratio of surge to water depth, the relative surge of FOWT-SFFC is still the smallest. For maximum heave of FOWT-SFFC, the motions are only 0.196 m in LC2 and 0.559 m in LC3, respectively 17% and 21% of the maximum heave of OC4DeepCwind. With regards to maximum pitch, the respective ratios of FOWT-SFFC to OC3Hywind in LC2 and LC3 are 54% and 55%. Pitch of FOWT-SFFC would not exceed 5 degrees in harsh environments. The maximum tower base stresses of FOWT-SFFC in LC2 and LC3 are almost identical to stresses in OC4DeepCwind, but over 25% lower than stresses in OC3Hywind. The statistics in
Table 9 and
Table 10 demonstrate that the FOWT-SFFC has least dynamic effects caused by combined random wind and waves and its seakeeping and station keeping performances are the best among three floating concepts.
It can be seen in
Table 9 and
Table 10 that the three floating wind turbines contain both left-skewed and right-skewed responses in LC2 and LC3, though the skew is not remarkable. The level of non-Gaussianity in FOWT-SFFC’s responses is very weak because almost all skewness values of surge, heave, pitch and tower base stress are smaller than 0.1, and kurtosis values are around 3.
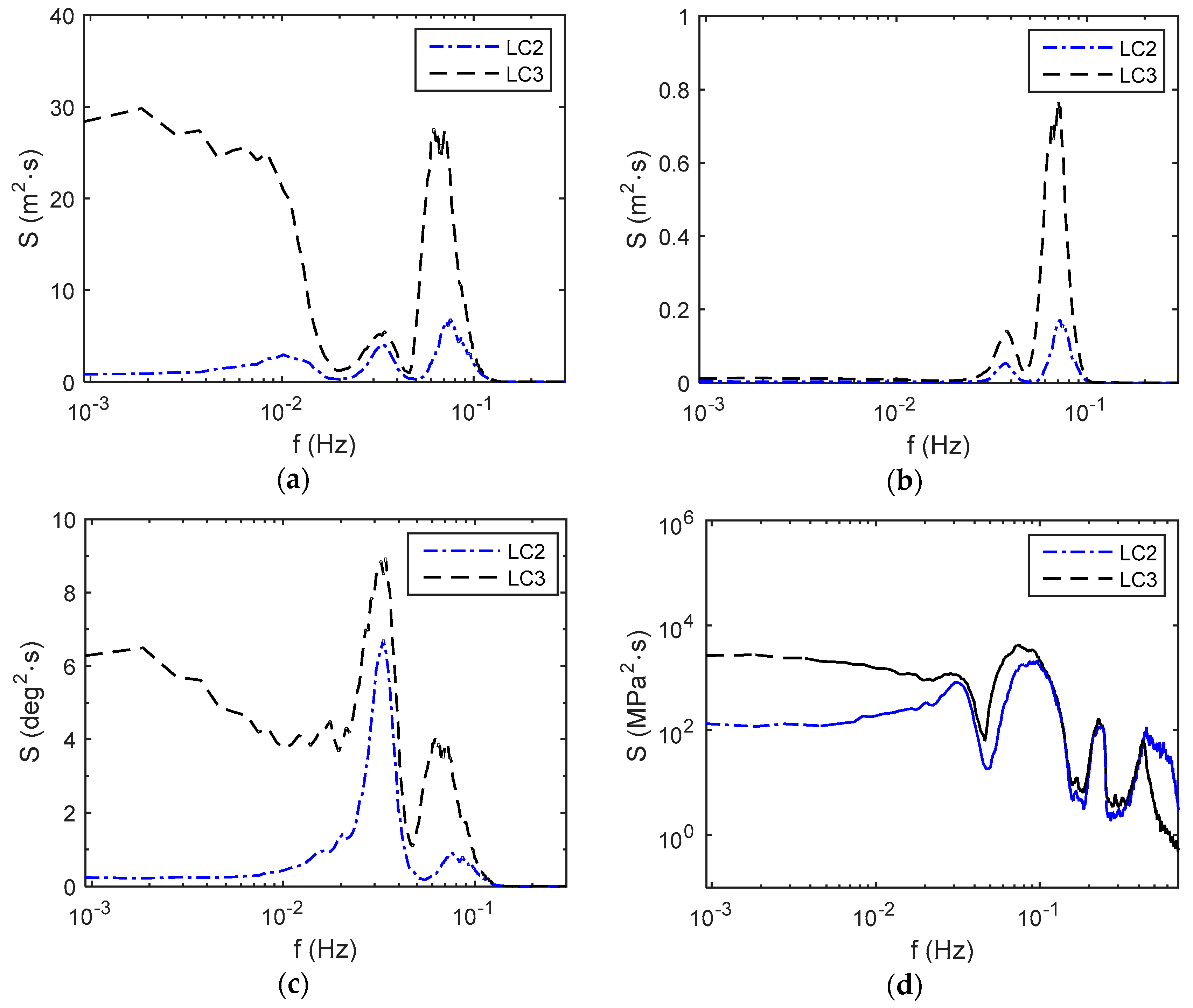
In
Figure 10, the response power spectra of surge, heave, pitch and tower base stress of FOWT-SFFC for extreme load cases LC2 and LC3 are illustrated.
From
Figure 10a, it can be seen that the spectrum of surge motion in LC2 has three peaks at 0.0102 Hz, 0.0333 Hz and 0.0759 Hz, which actually are around the surge natural frequency
(
Table 5), pitch natural frequency
(
Table 6) and peak wave frequency
(
Table 7). Obviously, pitch motion also contributes to the overall surge. The peak at
is the lowest, because at 0.0102 Hz the energy in wave spectrum is very small. Compared to LC2, the surge motion spectrum in LC3 also exhibit spectral peaks at
and the corresponding
, but contains much more energy at low frequencies. This is because in LC3 the wind speed is much larger and the turbine has shut down, while the assumed blade-pitch angles are all zeros, leading to maximum windward area of blades. Therefore, the wind thrust in LC3 is much larger than that in LC2. Considering also that the surge motion is heavily subjected to thrust, the appreciable energy of surge at low frequencies can thereby be manifested.
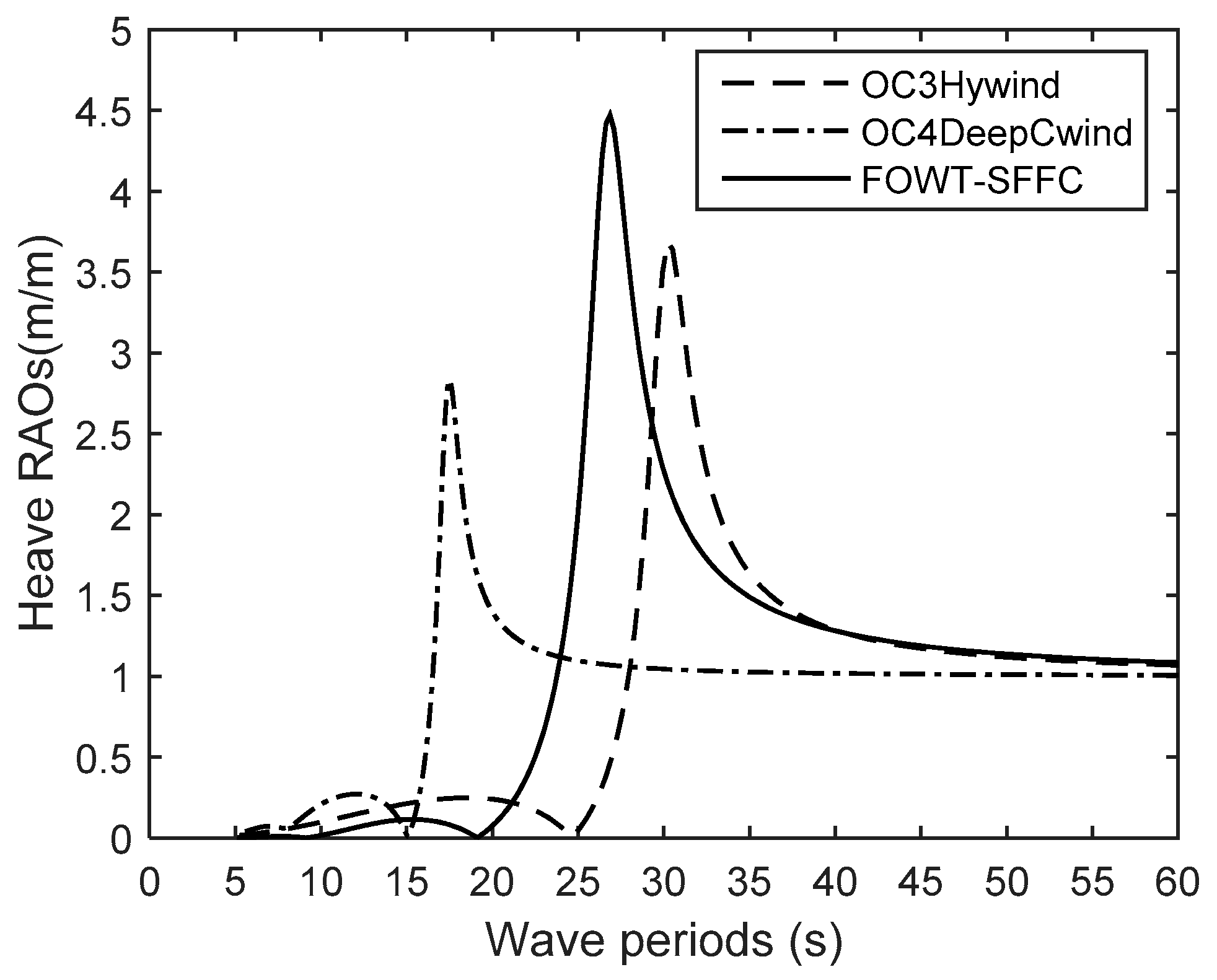
For the heave motion in
Figure 10b, the responses in LC2 and LC3 are peaked around both heave natural frequency (
in
Table 6) and corresponding
. No response amplification occurs at low frequencies, in that the wind load can hardly affect the heave motion. At
, the response energy in LC3 is remarkably higher than that in LC2, not only because the significant wave height Hs (
Table 7) is 47.3% larger, but also because of the big difference in heave RAO (
Figure 5). The reason why spectral peak at
is much lower than that at
is due to the too small energy density at
. Meanwhile, it should be recognized that as the variances of heave (equal to area under power spectral curve minus square of mean) are small, the heave motions of FOWT-SFFC are actually less than 0.2 m in LC2 and 0.6 m in LC3 (
Table 9 and
Table 10), evidencing the excellent motion of heave for FOWC-SFFC.
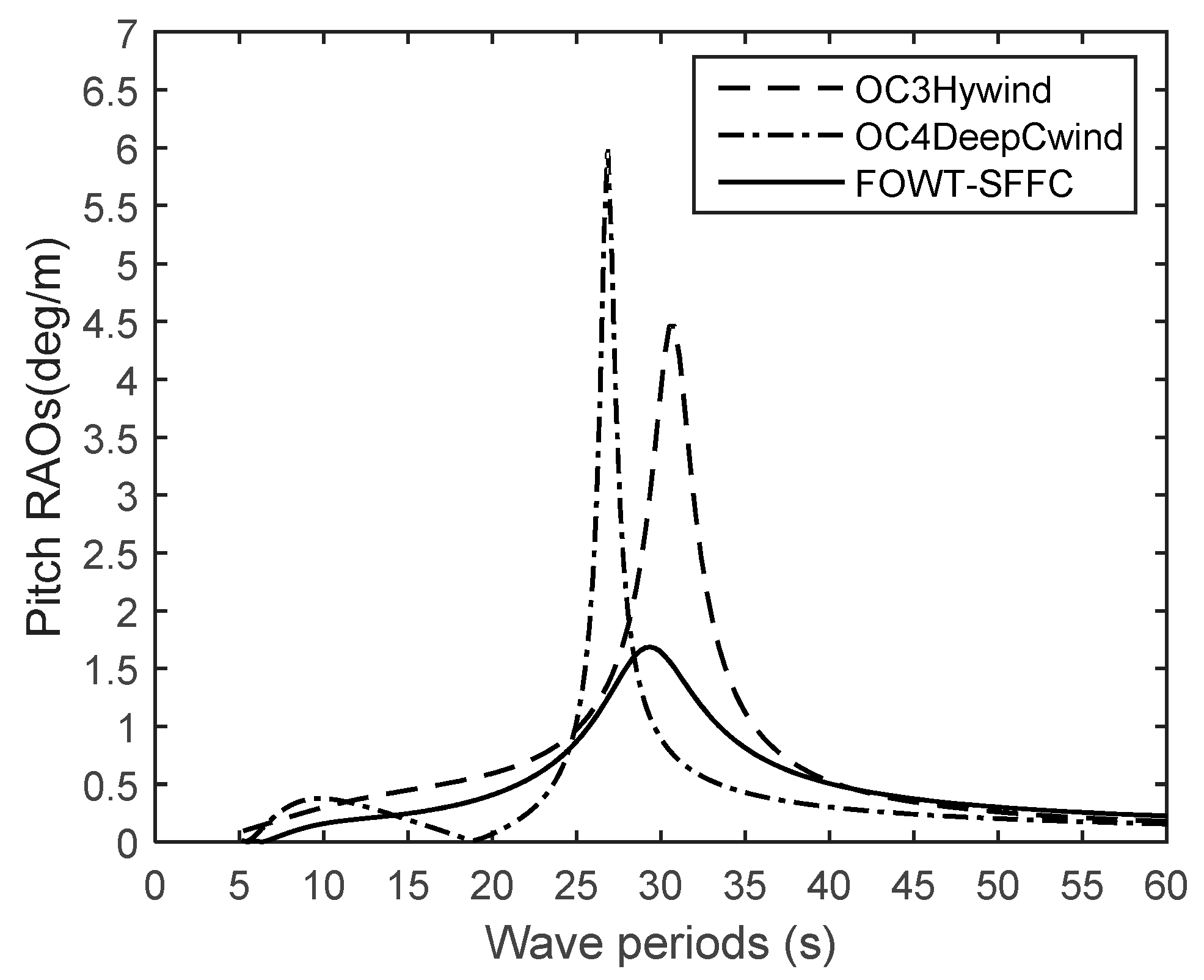
As for pitch motion in
Figure 10c, there are two peaks in the response spectrum of LC2, respectively around
and
. But obviously more energy is concentrated around
. This is due to the small damping of pitch (2.37% in
Table 5) and much larger pitch RAO at
than at
(
Figure 6). In LC3, as the moment induced by wind thrust has a significant effect on the pitch motion, the pitch response is pronounced at low frequencies.
When it comes to tower base stress in
Figure 10d, it is more complex. In LC2 and LC3, four peaks appear in the tower base stress spectrum. The first two peaks are at frequencies around
and
. The fourth peak arises at 0.4454 Hz which is very close to the first tower fore-aft natural frequency (
). Response amplifications at these three frequencies are not difficult to interpret by the knowledge of structural dynamics and the input-output spectral relation in Equation (3). However, appearance of the third peak at 0.2370 Hz in LC2 and 0.2269 Hz in LC3 is more intricate. These two frequencies are about three times
(
Table 7). Such multiple-frequency responses, or so-called superharmonic responses [
52], are essentially caused by the Morison drag wave load acting on structural members of small diameter and drag load induced cage motions. Fortunately, the spectral densities at
and 3
are much lower than densities at
and
, implying insignificant structural resonance (since
is far away from
) and low level of non-Gaussian stress caused by Morison drag force. In addition, it can be clearly observed that in LC3 owing to wind thrust induced bending moment, the spectrum of stress at tower base has appreciable densities at low frequencies. The stress response of FOWT-SFFC is mainly contributed by wind, waves at
and pitch motion.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}