Sliding Mode Thau Observer for Actuator Fault Diagnosis of Quadcopter UAVs



Abstract
:Featured Application
Abstract
1. Introduction
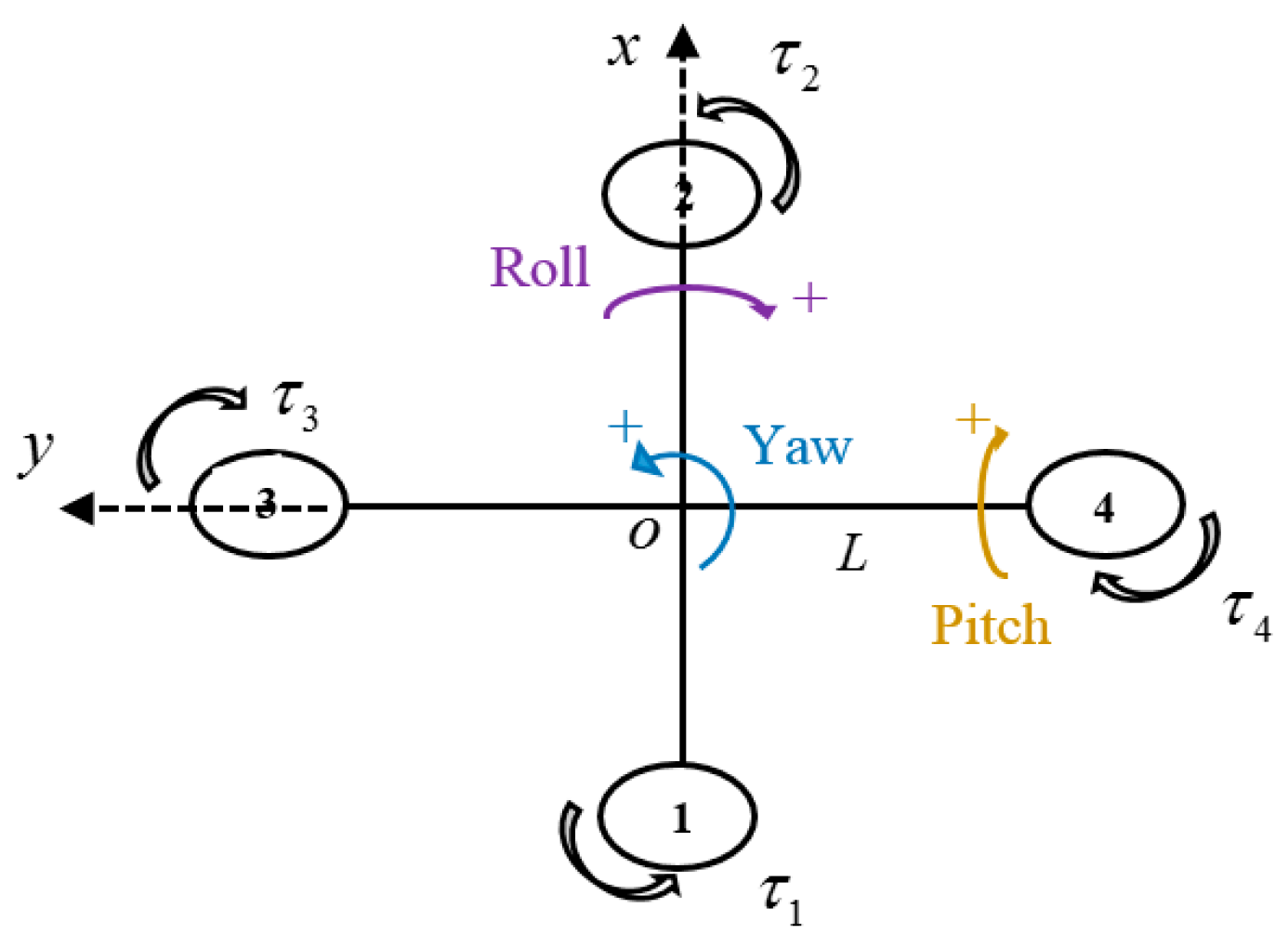
2. System Description
3. Nonlinear Observer for Fault Diagnosis
3.1. Standard Thau Observer for Fault Detection
3.2. Adaptive Sliding Mode Thau Observer for Fault Diagnosis
3.3. Stability Analysis
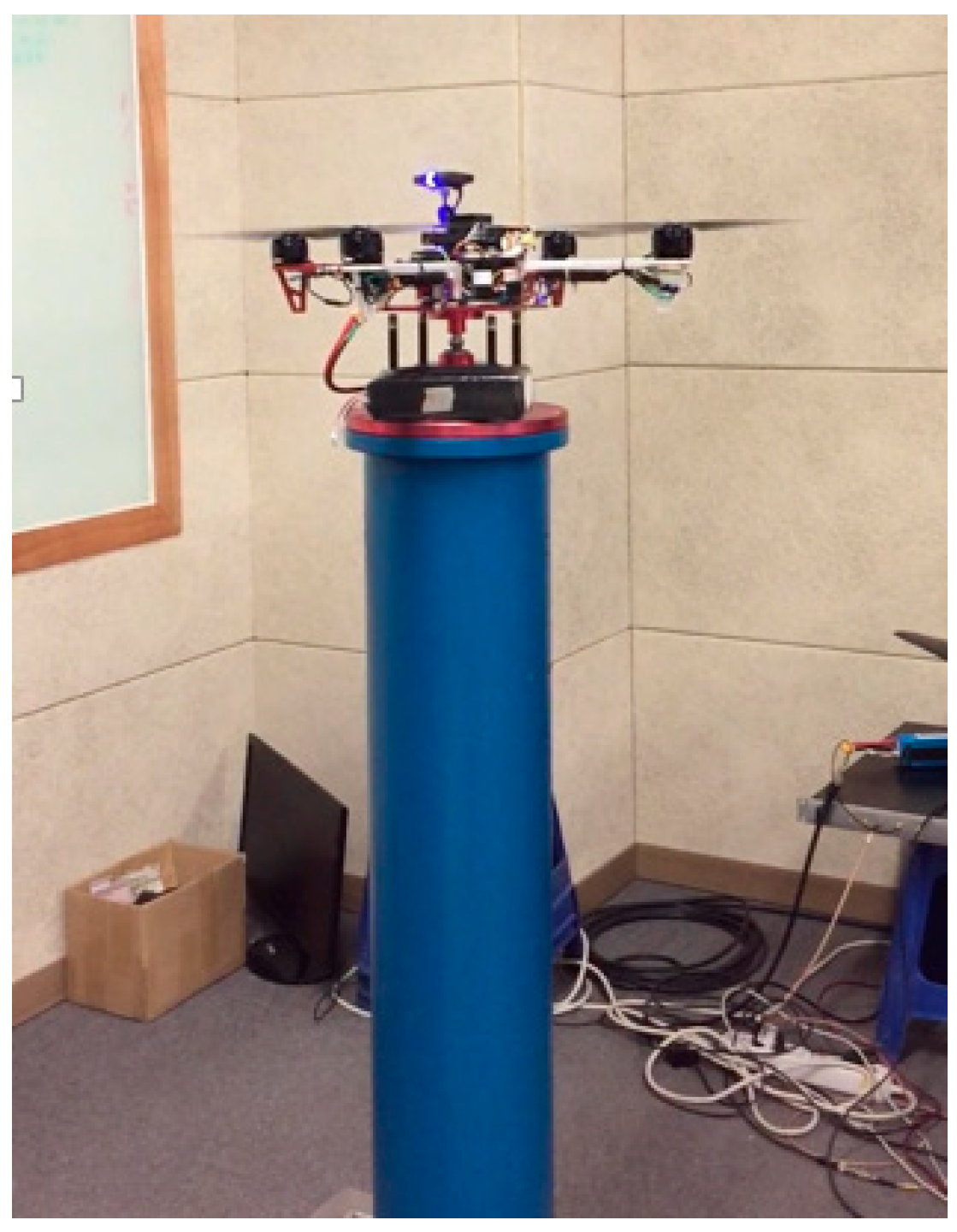
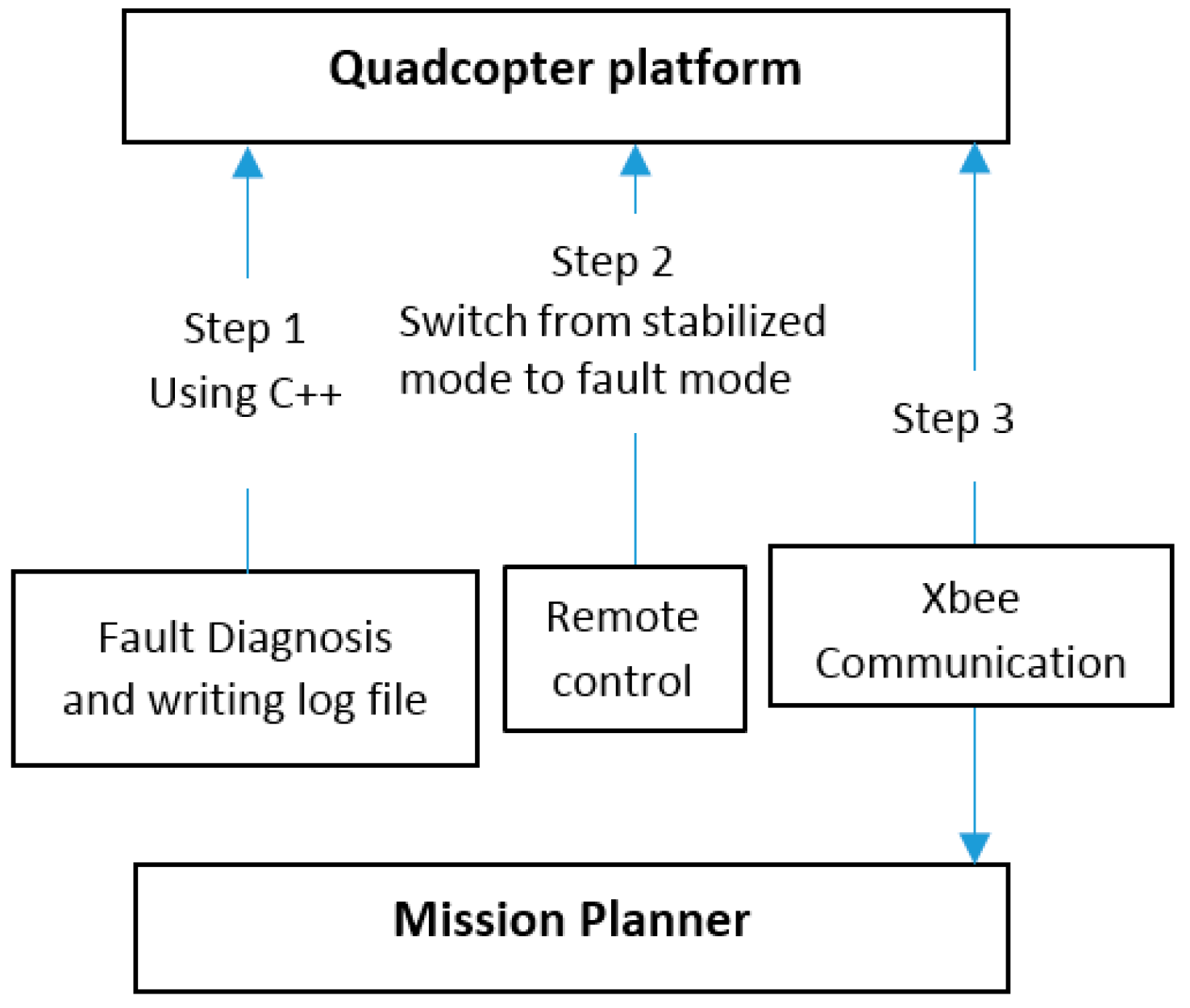
4. Experimental Results
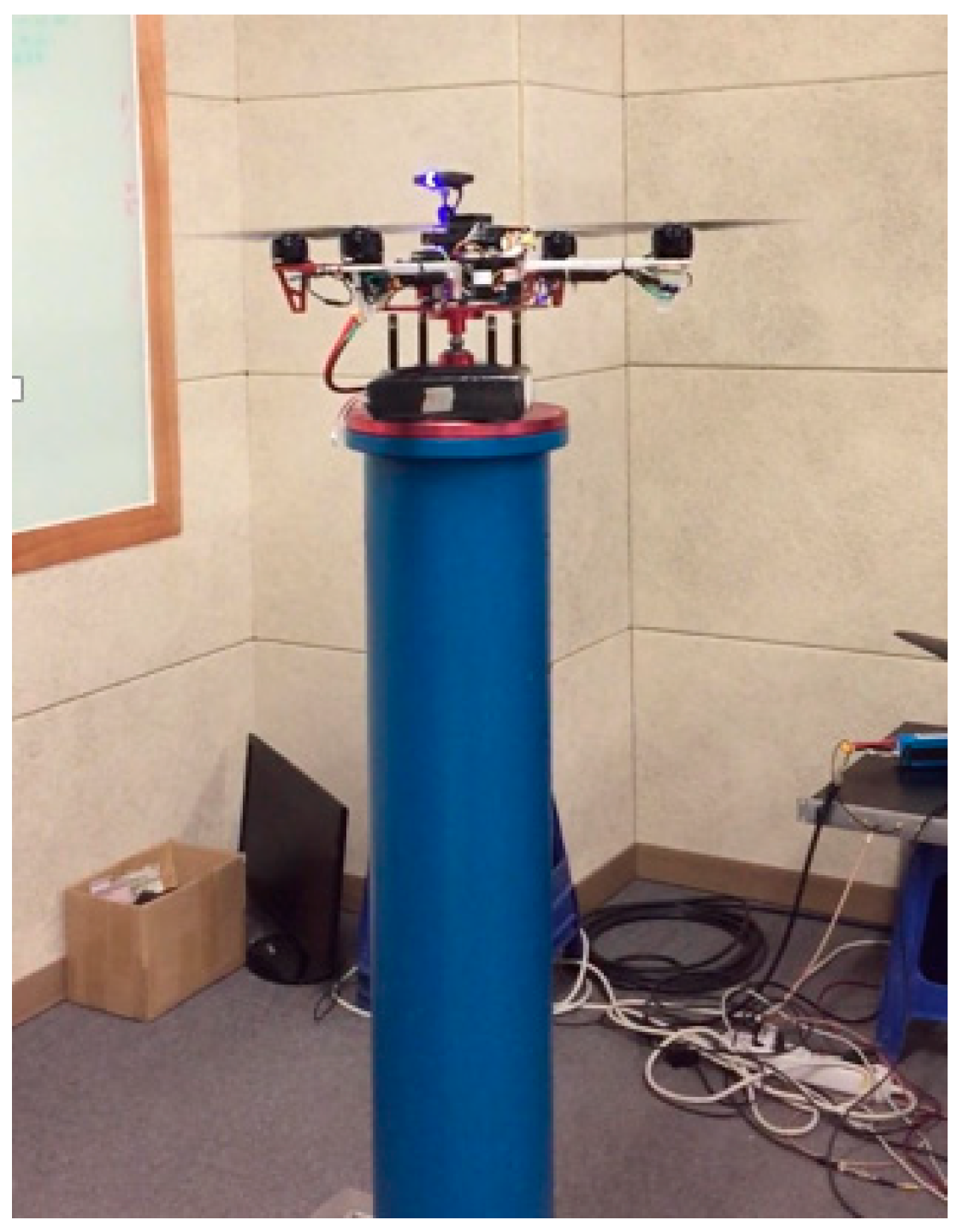
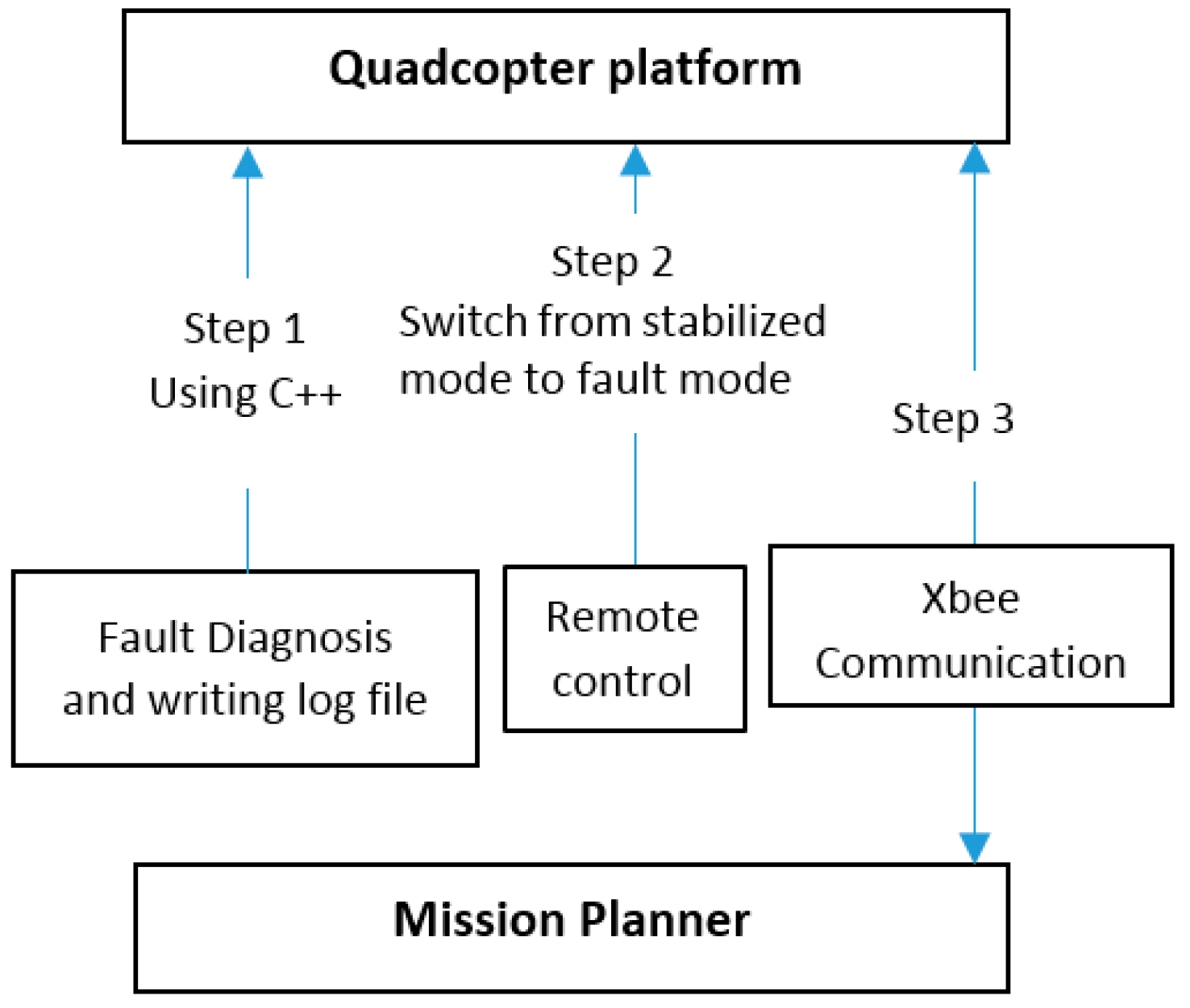
4.1. Experimental Setup and Parameters
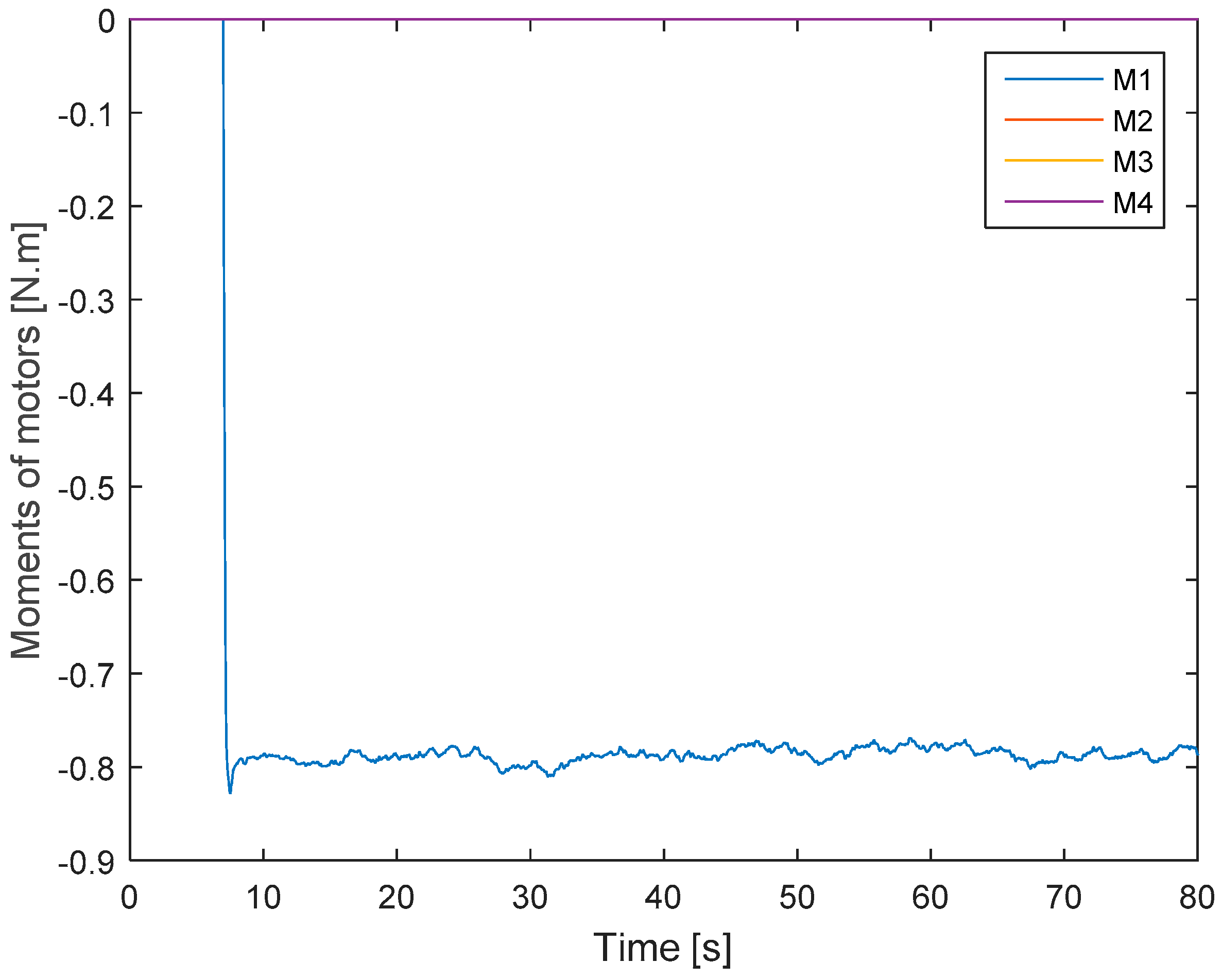
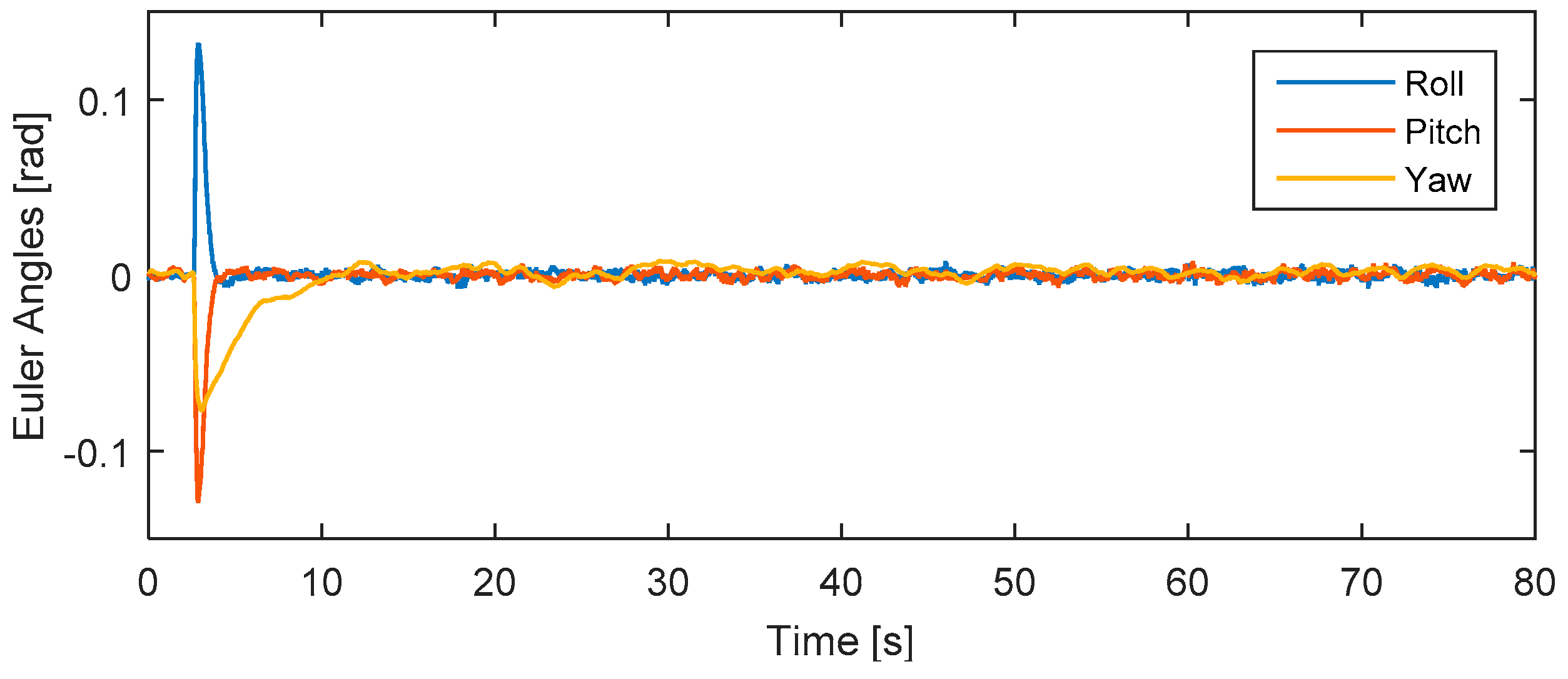
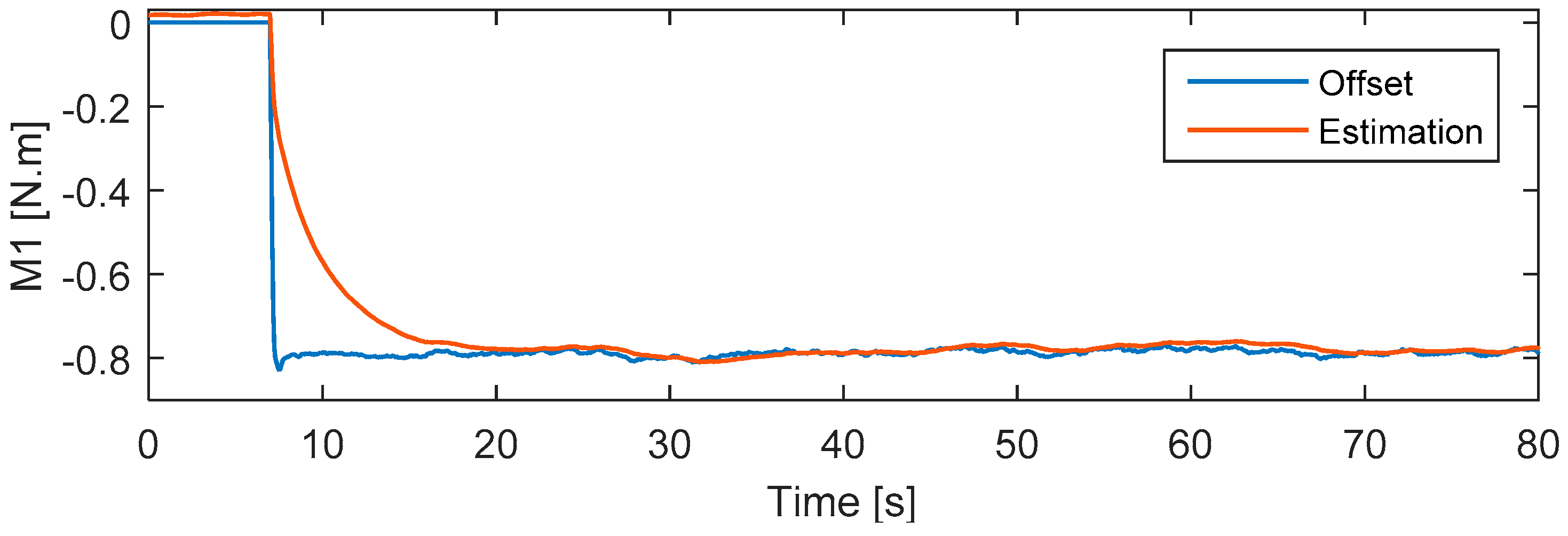
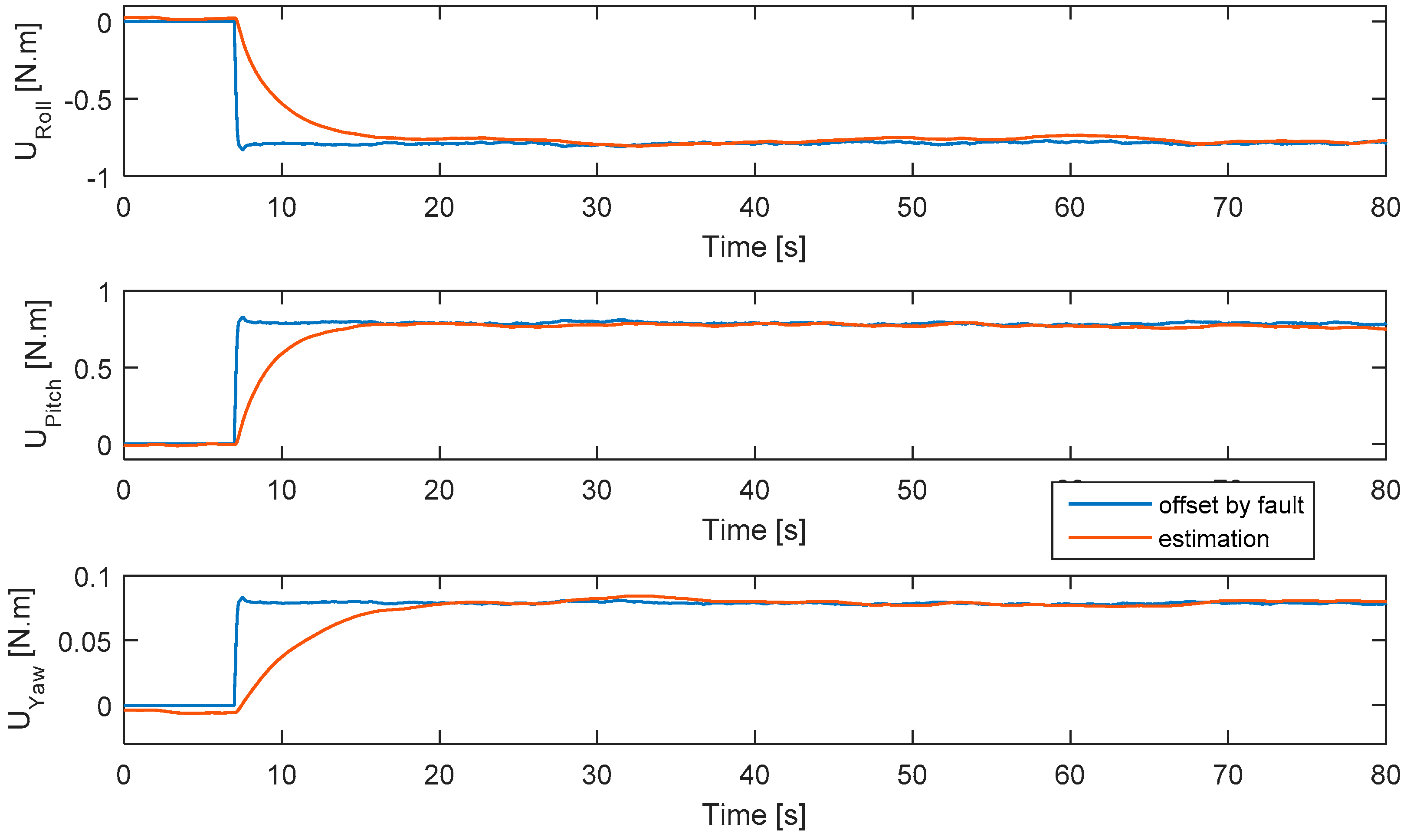
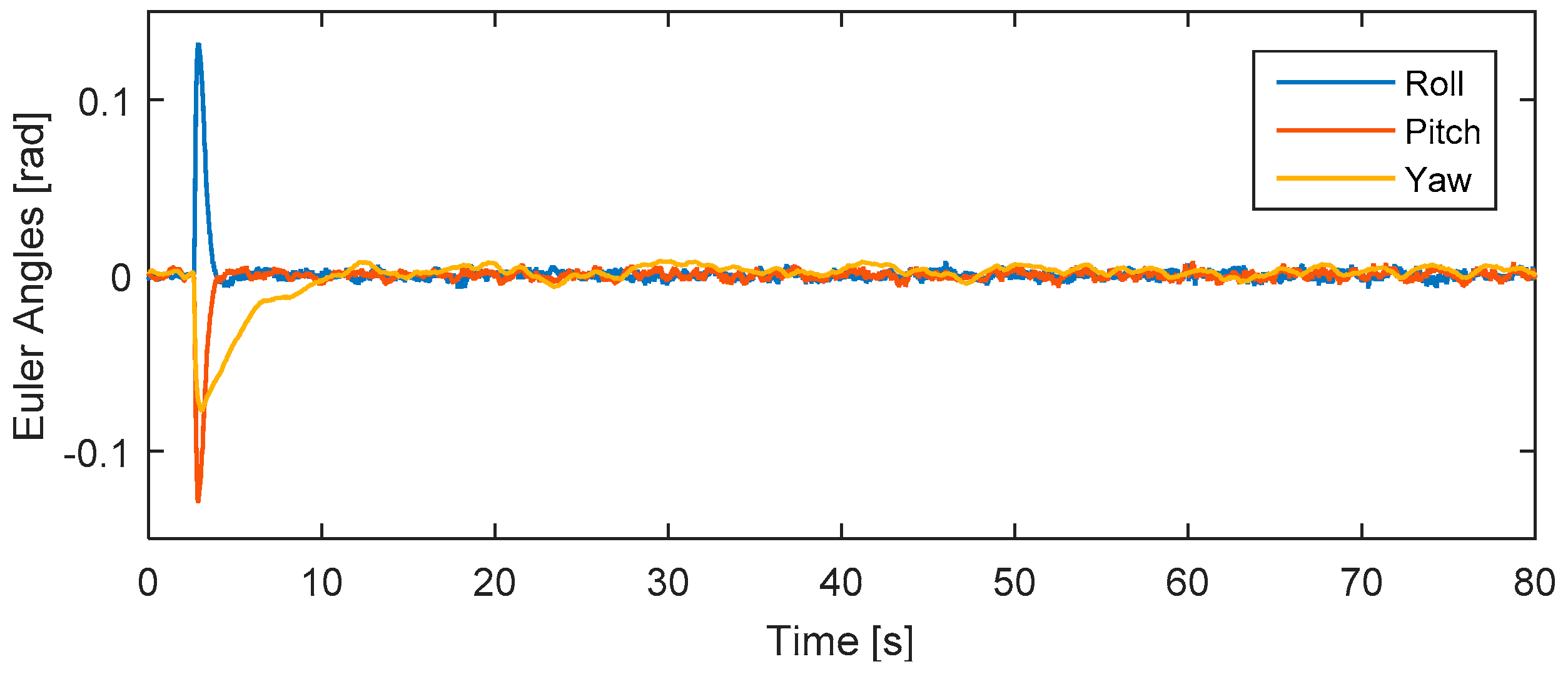
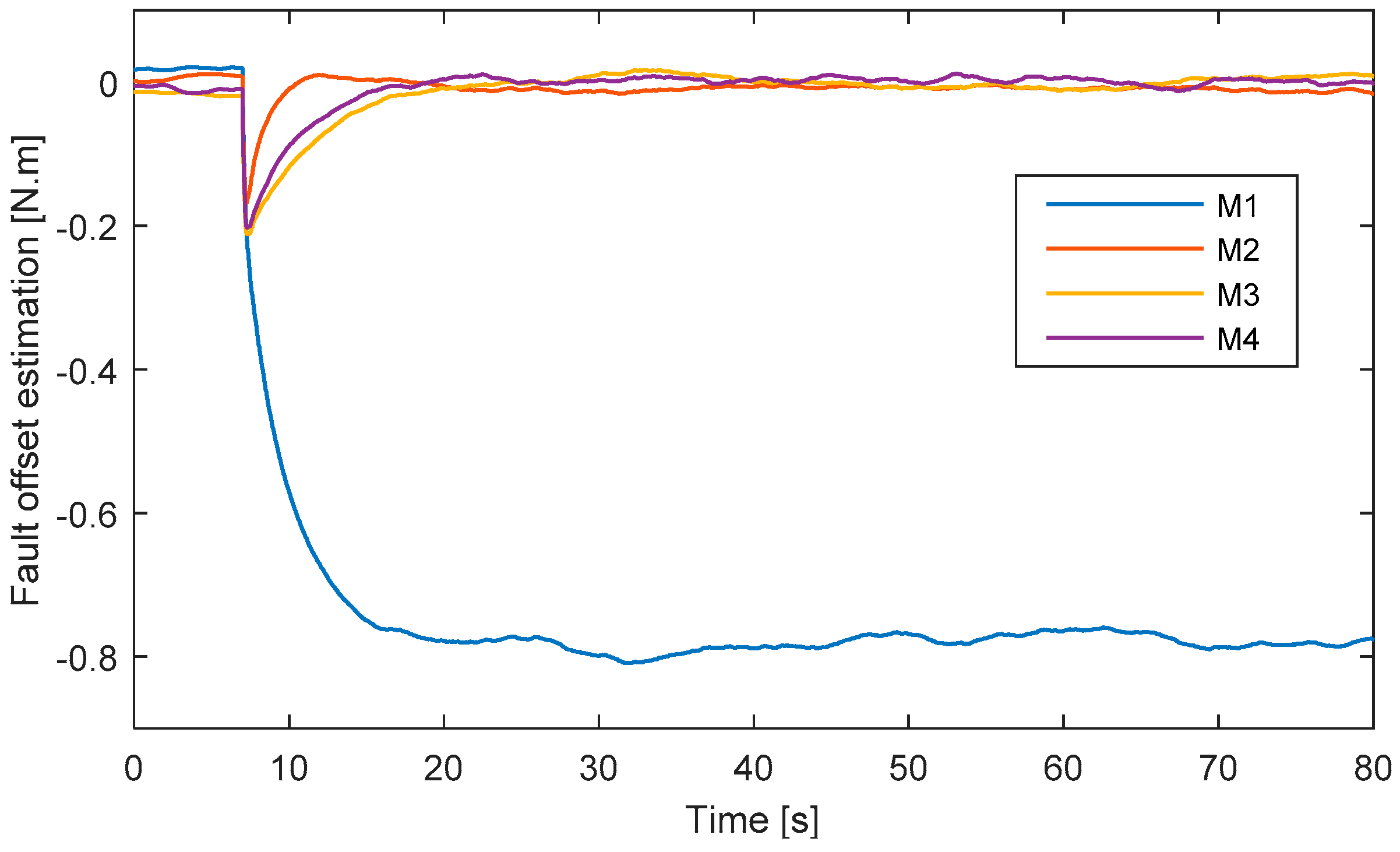
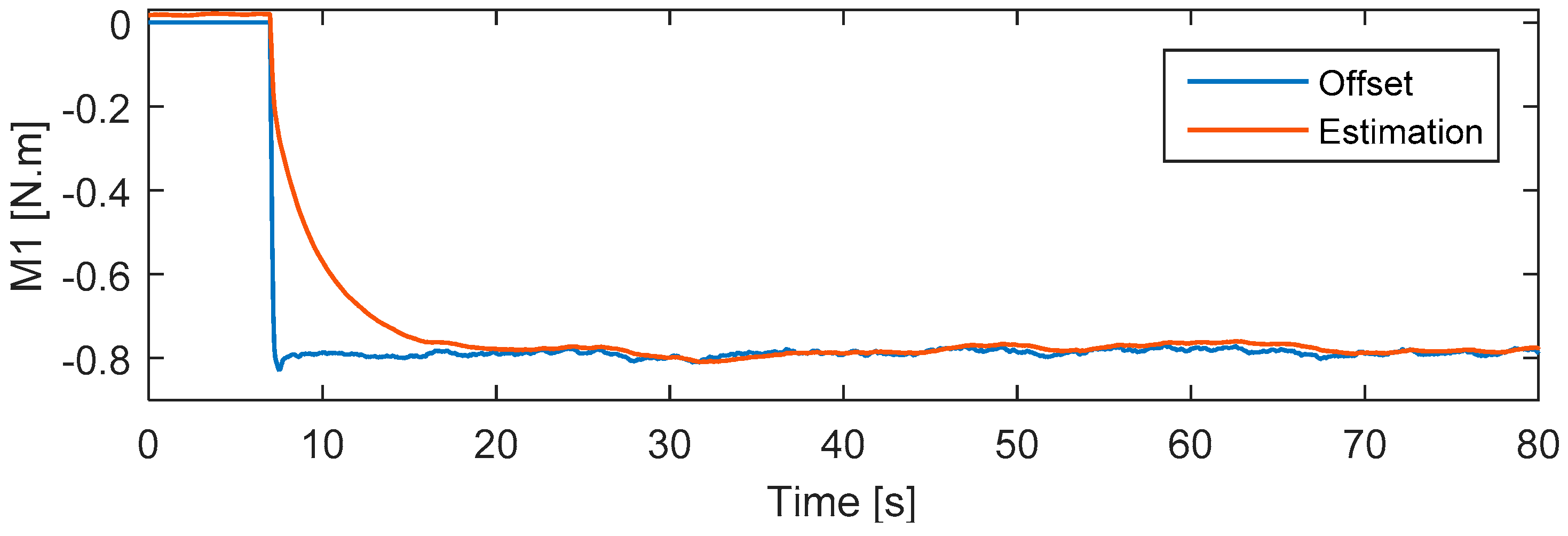
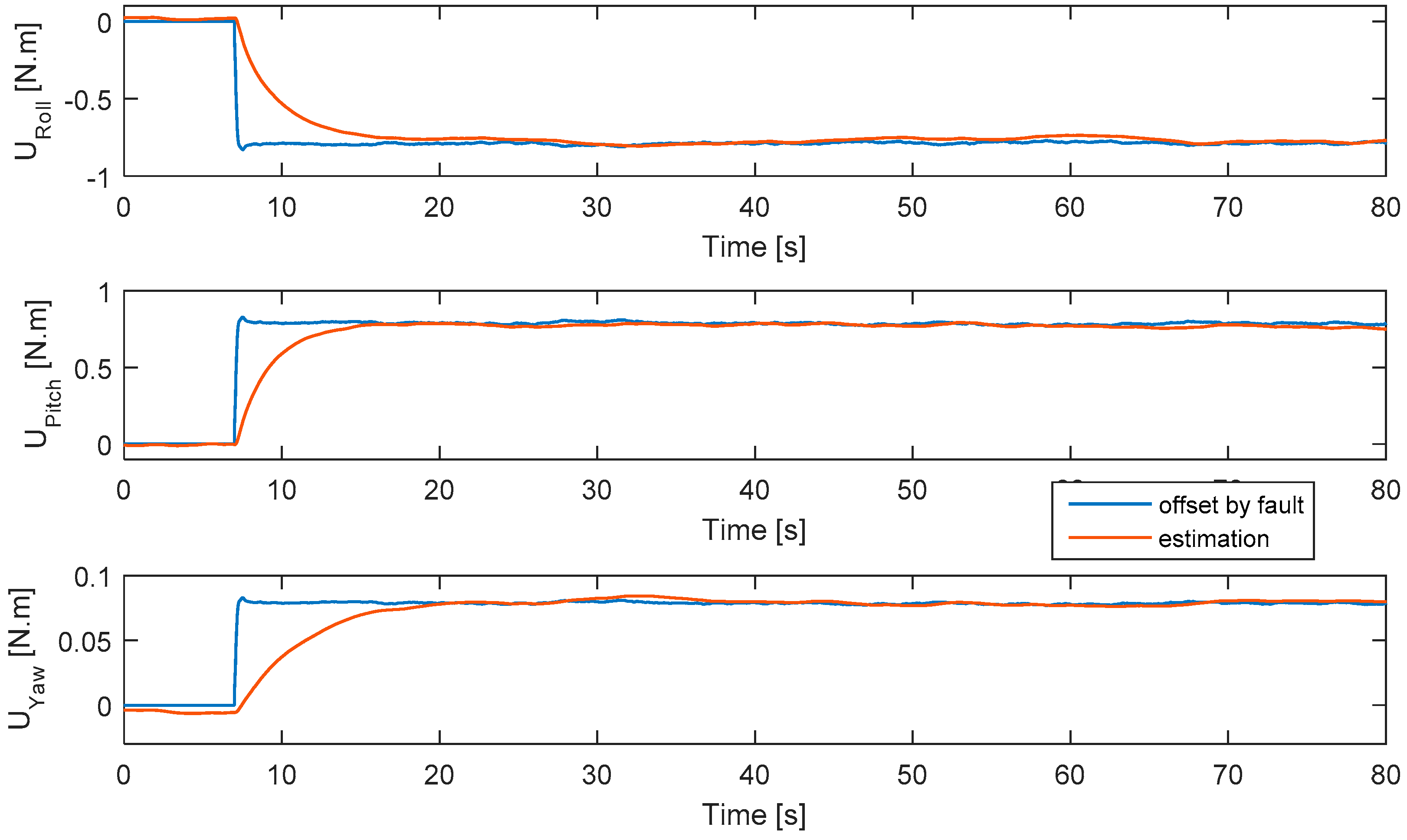
4.2. Robust Fault Diagnosis Result
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ren, W.; Beard, R.W. Trajectory tracking for unmanned air vehicles with velocity and heading rate constraints. IEEE Trans. Control Syst. Technol. 2004, 12, 706–716. [Google Scholar] [CrossRef]
- Bonna, R.; Camino, J.F. Trajectory Tracking Control of a Quadcopter Using Feedback Linearization. In Proceedings of the XVII International Symposium on Dynamic Problems of Mechanics, Natal-Rio Grande Do Norte, Brazil, 22–27 February 2015. [Google Scholar]
- Amoozgar, M.H.; Chamseddine, A.; Zhang, Y. Experimental test of a two-stage Kalman filter for actuator fault detection and diagnosis of an unmanned quadcopter helicopter. J. Intell. Robot. Syst. 2013, 70, 107–117. [Google Scholar] [CrossRef]
- Chen, F.; Lei, W.; Tao, G.; Jiang, B. Actuator Fault Estimation and Reconfiguration Control for Quad-rotor Helicopter. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Zhao, W.; Go, T.H. Quadcopter formation flight control combining MPC and robust feedback linearization. J. Frankl. Inst. 2014, 351, 1335–1355. [Google Scholar] [CrossRef]
- Mahmood, A.; Kim, Y. Decentralized formation flight control of quadcopters using robust feedback linearization. J. Frankl. Inst. 2017, 354, 852–871. [Google Scholar] [CrossRef]
- Zhao, Q.; Jiang, J. Reliable state feedback control system design against actuator failures. Automatica 1998, 34, 1267–1272. [Google Scholar] [CrossRef]
- Tao, G.; Chen, S.; Joshi, S.M. An adaptive actuator failure compensation controller using output feedback. IEEE Trans. Autom. Control 2002, 47, 506–511. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, J. Bibliographical review on reconfigurable fault-tolerant control systems. Annu. Rev. Control 2008, 32, 229–252. [Google Scholar] [CrossRef]
- Freddi, A.; Longhi, S.; Monteriù, A. A diagnostic thau observer for a class of unmanned vehicles. J. Intell. Robot. Syst. 2012, 67, 61–73. [Google Scholar] [CrossRef]
- Freddi, A.; Longhi, S.; Monteriù, A. A model-based fault diagnosis system for a mini-quadrotor. In Proceedings of the 2009 7th Workshop on Advanced Control and Diagnosis, Zielona Gora, Poland, 19–20 November 2009; pp. 19–20. [Google Scholar]
- Ma, L. Development of Fault Detection and Diagnosis Techniques with Applications to Fixed-Wing and Rotarywing UAVs. Master’s Thesis, Concordia University, Montréal, QC, Canada, 2011. [Google Scholar]
- Ma, L.; Zhang, Y.M. Fault detection and diagnosis for GTM UAV with dual unscented Kalman filter. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010; p. 7884. [Google Scholar]
- Veluvolu, K.C.; Defoort, M.; Soh, Y.C. High-gain observer with sliding mode for nonlinear state estimation and fault reconstruction. J. Frankl. Inst. 2014, 351, 1995–2014. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, K.; Jiang, B.; Wen, C. Adaptive sliding mode observer-based robust fault reconstruction for a helicopter with actuator fault. Asian J. Control 2016, 18, 1558–1565. [Google Scholar] [CrossRef]
- Fekih, A.; Xu, H.; Chowdhury, F.N. Neural networks based system identification techniques for model based fault detection of nonlinear systems. Int. J. Innov. Comput. Inf. Control 2007, 3, 1073–1085. [Google Scholar]
- Rajakarunakaran, S.; Venkumar, P.; Devaraj, D.; Surya Prakasa Rao, K. Artificial neural network approach for fault detection in rotary system. J. Appl. Soft Comput. 2008, 8, 740–748. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, B.; Shi, P. Adaptive Observer-Based Fault Diagnosis with application to satellite attitude control system. In Proceedings of the Second International Conference on Innovative Computing, Information and Control, Kumamoto, Japan, 5–7 September 2007; p. 508. [Google Scholar]
- Wang, H.; Daley, S. Actuator fault diagnosis: An adaptive observer-based technique. IEEE Trans. Autom. Control 1996, 41, 1073–1078. [Google Scholar] [CrossRef]
- Li, L.; Chadli, M.; Ding, S.X.; Qiu, J.; Yang, Y. Diagnostic Observer Design for T-S Fuzzy Systems: Application to Real-Time Weighted Fault Detection Approach. IEEE Trans. Fuzzy Syst. 2018, 26, 805–816. [Google Scholar] [CrossRef]
- Youssef, T.; Chadli, M.; Karimi, H.R.; Wang, R. Actuator and sensor faults estimation based on proportional integral observer for TS fuzzy model. J. Frankl. Inst. 2017, 354, 2524–2542. [Google Scholar] [CrossRef]
- Cen, Z.; Noura, H.; Susilo, T.B.; Youmes, Y.A. Robust Fault Diagnosis for Quadrotor UAVs Using Adaptive Thau Observer. J. Intell. Robot. Syst. 2014, 73, 573–588. [Google Scholar] [CrossRef]
- Walcott, B.L.; Corless, M.J.; Zak, S.H. Comparative study of nonlinear state-observation techniques. Int. J. Control 1987, 45, 2109–2132. [Google Scholar] [CrossRef]
- Zhang, Y.; Chamseddine, A. Fault tolerant flight control techniques with application to a quadrotor UAV testbed. In Automatic Flight Control Systems—Latest Developments; Lombaerts, T., Ed.; InTech: Vienna, Austria, 2012; pp. 119–150. [Google Scholar]
- Zhang, K.; Jiang, B.; Cocquempot, V. Adaptive observer-based fast fault estimation. Int. J. Control Autom. Syst. 2008, 6, 320–326. [Google Scholar]
- Editing/Building with Eclipse on Windows. Available online: http://ardupilot.org/dev/docs/editing-the-code-with-eclipse.html (accessed on 31 August 2018).
- Telemetry. Available online: http://ardupilot.org/copter/docs/common-telemetry-landingpage.html (accessed on 31 August 2018).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| Arm length | m | |
| Thrust coefficient | N/m2 | |
| Drag coefficient | ||
| m | Mass | kg |
| Moments of inertia | kg·m2 | |
| Rotor inertia | kg·m2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, N.P.; Hong, S.K. Sliding Mode Thau Observer for Actuator Fault Diagnosis of Quadcopter UAVs. Appl. Sci. 2018, 8, 1893. https://doi.org/10.3390/app8101893
Nguyen NP, Hong SK. Sliding Mode Thau Observer for Actuator Fault Diagnosis of Quadcopter UAVs. Applied Sciences. 2018; 8(10):1893. https://doi.org/10.3390/app8101893
Chicago/Turabian StyleNguyen, Ngoc Phi, and Sung Kyung Hong. 2018. "Sliding Mode Thau Observer for Actuator Fault Diagnosis of Quadcopter UAVs" Applied Sciences 8, no. 10: 1893. https://doi.org/10.3390/app8101893
APA StyleNguyen, N. P., & Hong, S. K. (2018). Sliding Mode Thau Observer for Actuator Fault Diagnosis of Quadcopter UAVs. Applied Sciences, 8(10), 1893. https://doi.org/10.3390/app8101893