Effect of Surface Mass Loading on Geodetic GPS Observations

Abstract
1. Introduction
2. Materials and Methods
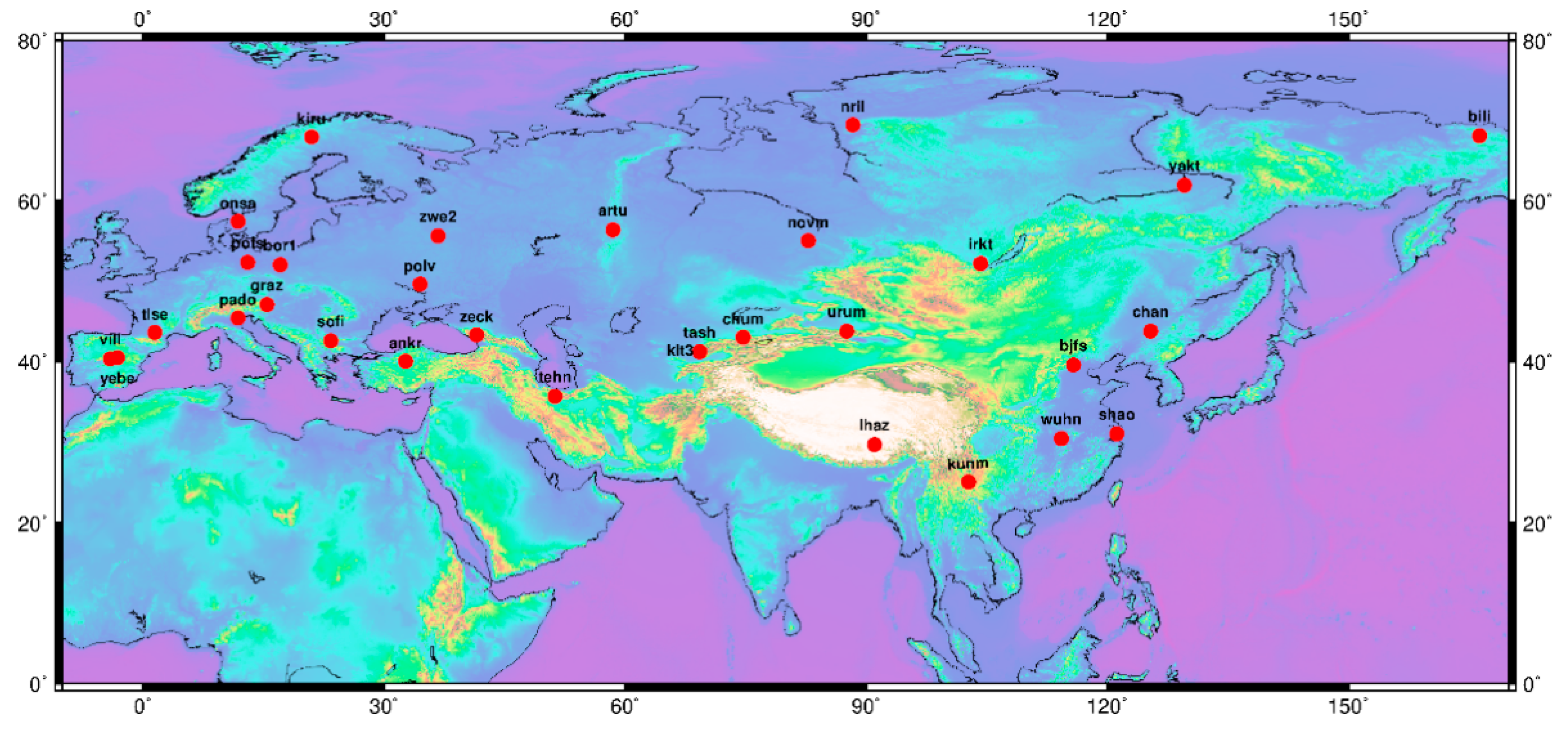
2.1. GPS Data
2.2. Mass Loading
2.3. Wavelet Coherence
3. Results and Discussion
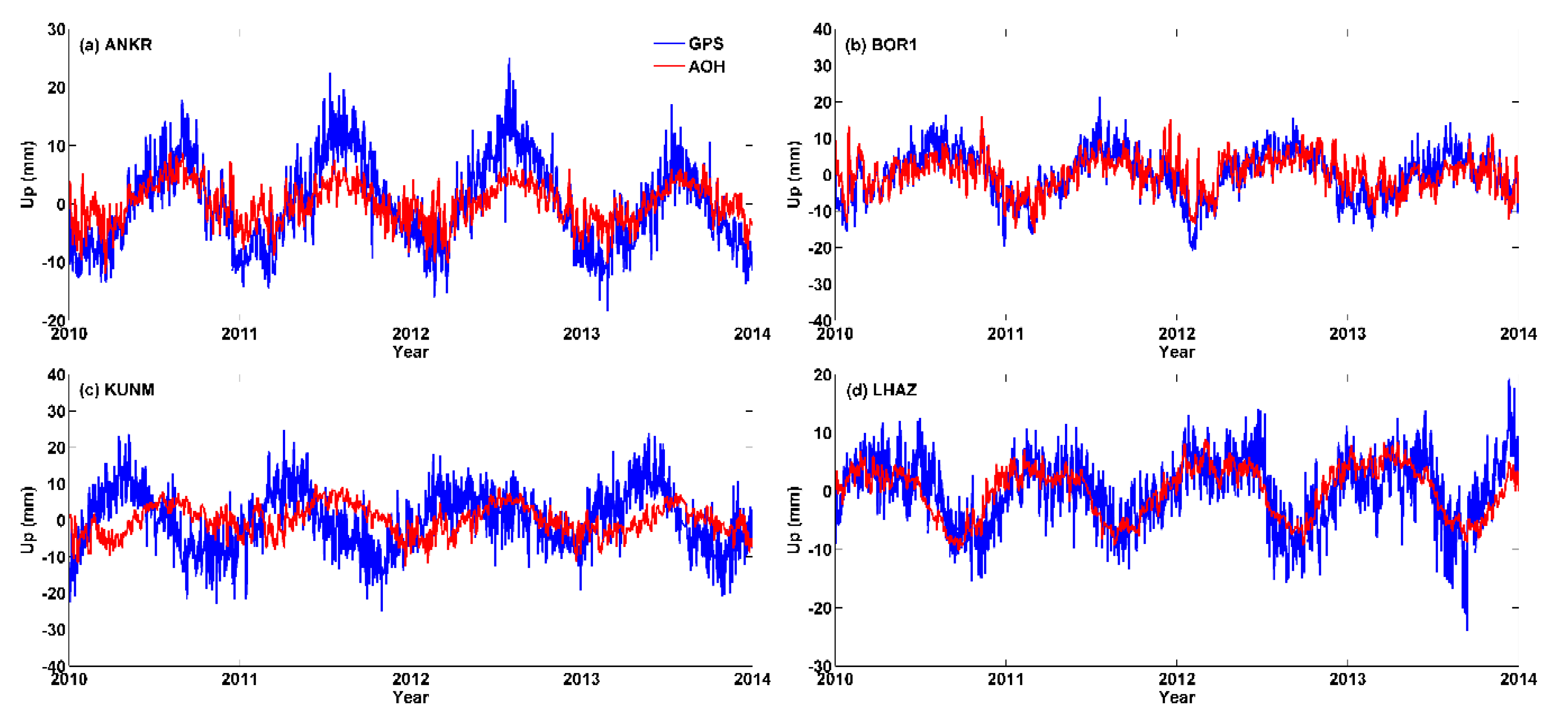
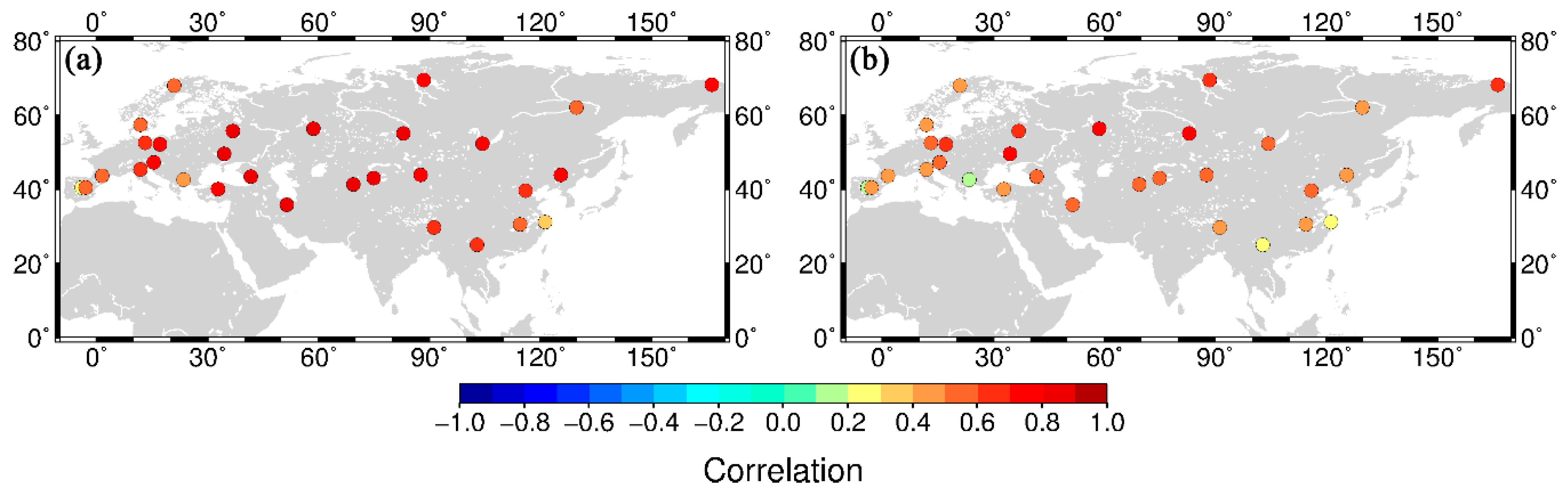
3.1. Root Mean Square Analysis and Correlation Analysis
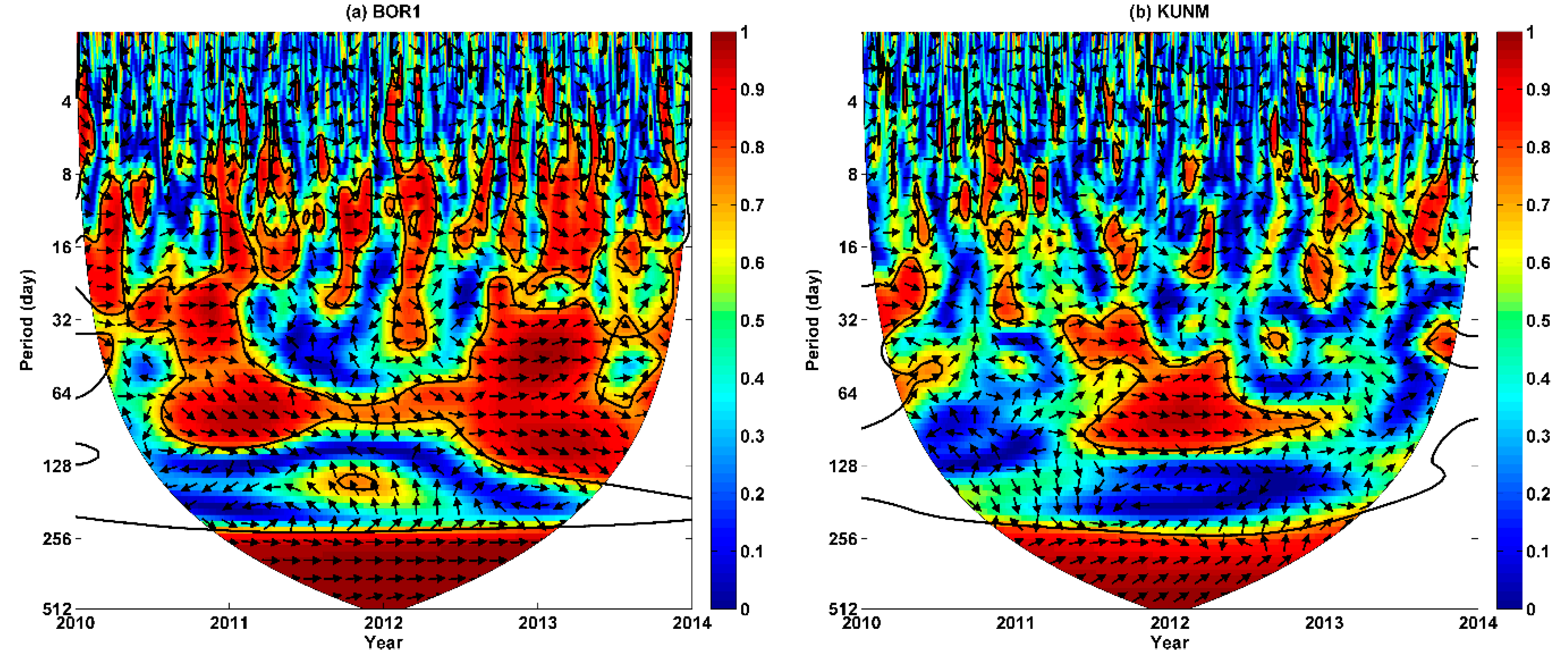
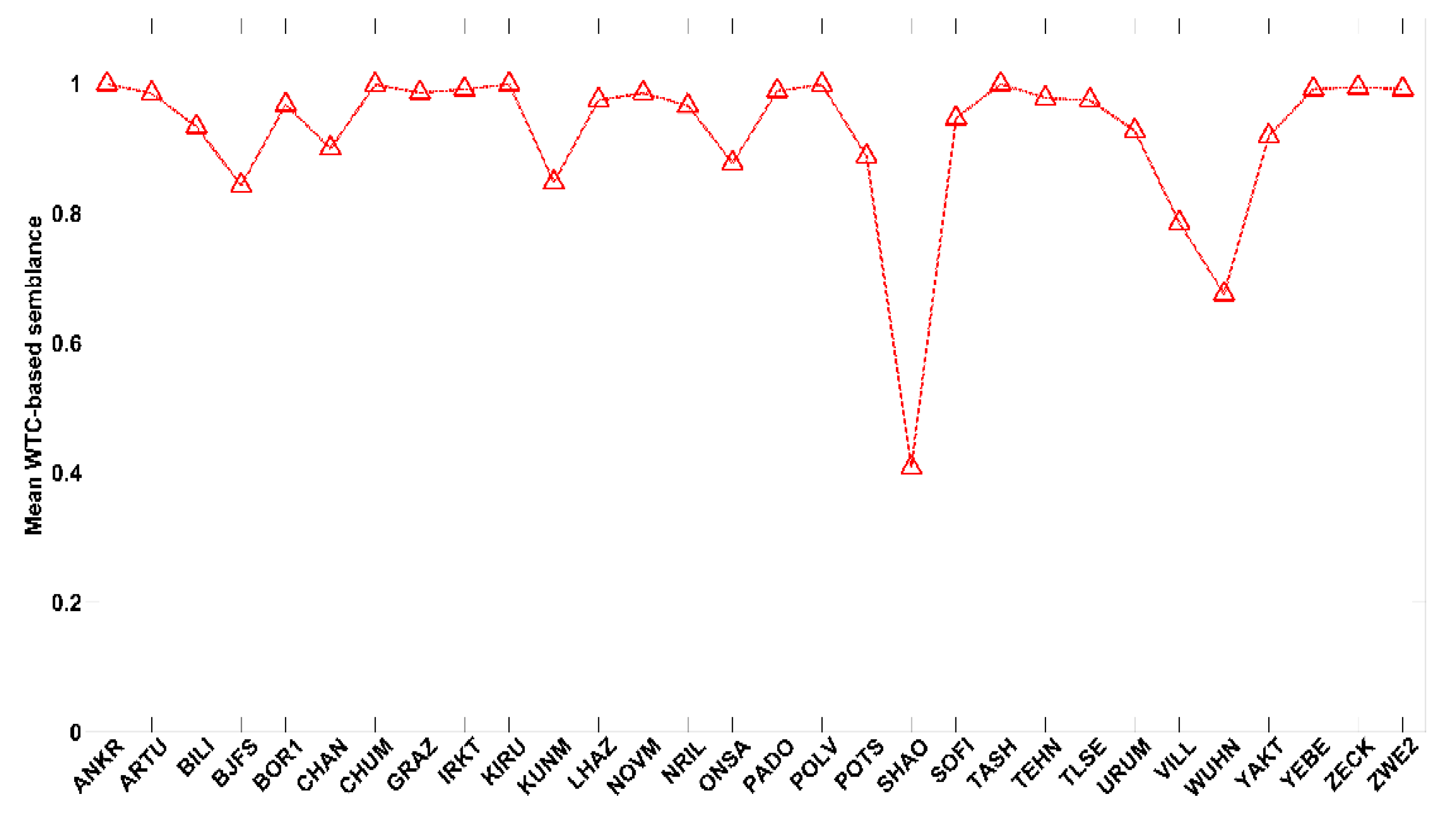
3.2. Wavelet Coherence Analysis
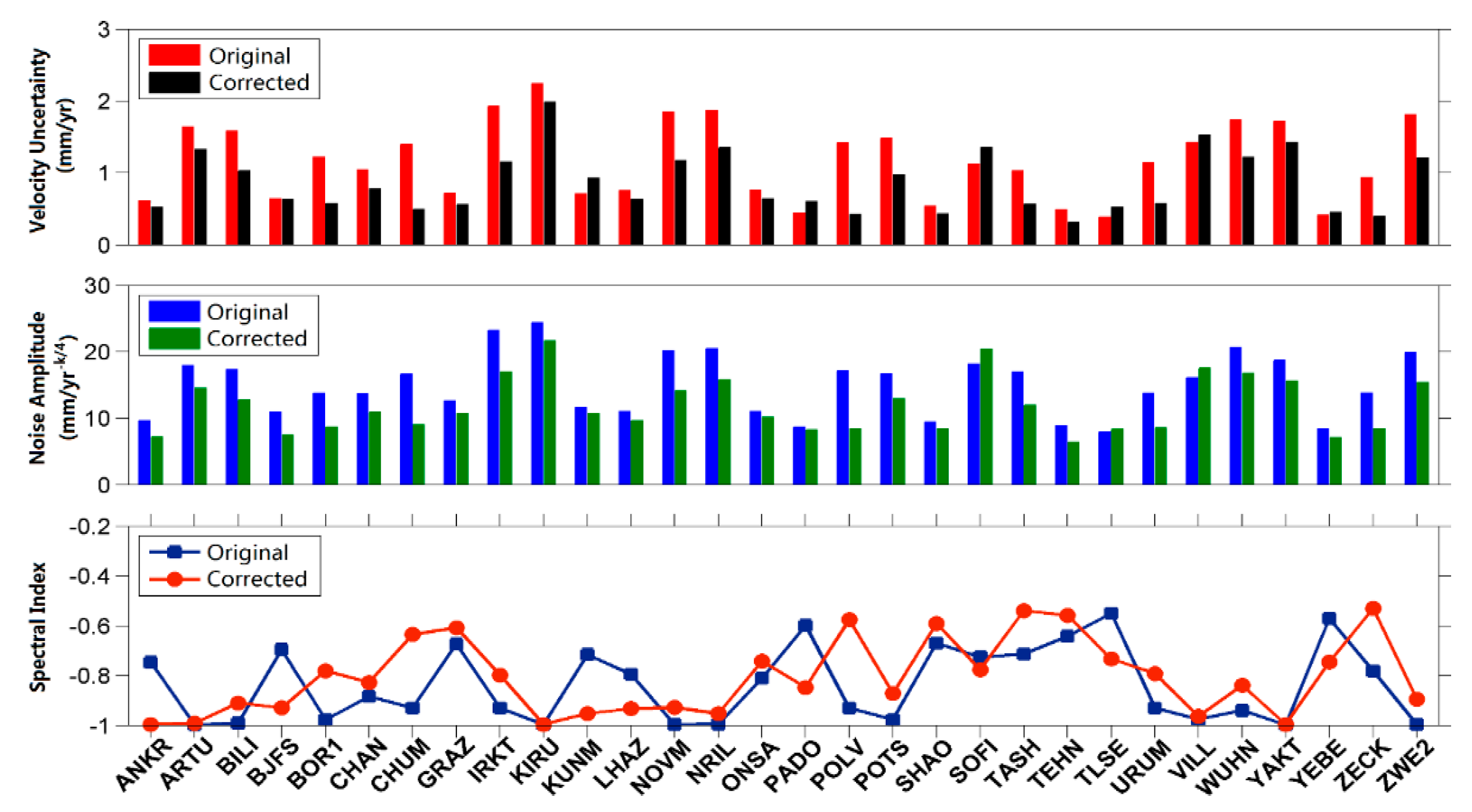
3.3. Noise and Velocity Analysis
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Williams, S.D.P.; Penna, N.T. Non-tidal ocean loading effects on geodetic GPS heights. Geophys. Res. Lett. 2011, 38, 159–164. [Google Scholar] [CrossRef]
- Fritsche, M.; Döll, P.; Dietrich, R. Global-scale validation of model-based load deformation of the Earth’s crust from continental watermass and atmospheric pressure variations using GPS. J. Geodyn. 2012, 59–60, 133–142. [Google Scholar] [CrossRef]
- Chanard, K.; Avouac, J.P.; Ramillien, G.; Genrich, J. Modeling deformation induced by seasonal variations of continental water in the Himalaya region: Sensitivity to Earth elastic structure. J. Geophys. Res. Solid Earth 2014, 119, 5097–5113. [Google Scholar] [CrossRef]
- Braitenberg, C. The deforming and rotating Earth-A review of the 18th International Symposium on Geodynamics and Earth Tide, Trieste 2016. Geod. Geodyn. 2018, 9, 187–196. [Google Scholar] [CrossRef]
- Marcin, R.; Tomasz, L. Analysis of seasonal position variation for selected GNSS sites in Poland using loading modelling and GRACE data. Geod. Geodyn. 2017, 8, 253–259. [Google Scholar]
- Dach, R.; Dietrich, R. Influence of the ocean loading effect on GPS derived precipitable water vapor. Geophys. Res. Lett. 2000, 27, 2953–2956. [Google Scholar] [CrossRef]
- Blewitt, G. Self-consistency in reference frames, geocenter definition, and surface loading of the solid Earth. J. Geophys. Res. Solid Earth 2003, 108, 2103. [Google Scholar] [CrossRef]
- Davis, J.L.; Elósegui, P.; Mitrovica, J.X.; Tamisiea, M.E. Climate-driven deformation of the solid Earth from GRACE and GPS. Geophys. Res. Lett. 2004, 31, 1–4. [Google Scholar] [CrossRef]
- Ouellette, K.J.; De-Linage, C.; Famiglietti, J.S. Estimating snow water equivalent from GPS vertical site-position observations in the western United States. Water Resour. Res. 2013, 49, 2508–2518. [Google Scholar] [CrossRef] [PubMed]
- Chew, C.C.; Small, E.E. Terrestrial water storage response to the 2012 drought estimated from GPS vertical position anomalies. Geophys. Res. Lett. 2014, 41, 6145–6151. [Google Scholar] [CrossRef]
- Amos, C.B.; Audet, P.; Hammond, W.C.; Burgmann, R.; Johanson, I.A.; Blewitt, G. Uplift and seismicity driven groundwater depletion in central California. Nature 2014, 509, 483–486. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.; Freymueller, J.T. Seasonal and long-term vertical deformation in the Nepal Himalaya constrained by GPS and GRACE measurements. J. Geophys. Res. 2012, 117, B03407. [Google Scholar] [CrossRef]
- Fu, Y.; Argus, D.F.; Freymueller, J.T.; Heflin, M.B. Horizontal motion in elastic response to seasonal loading of rain water in the Amazon Basin and monsoon water in Southeast Asia observed by GPS and inferred from GRACE. Geophys. Res. Lett. 2013, 40, 6048–6053. [Google Scholar] [CrossRef]
- Van-Dam, T.; Wahr, J.; Lavallée, D. A comparison of annual vertical crustal displacements from GPS and Gravity Recovery and Climate Experiment (GRACE) over Europe. J. Geophys. Res. 2007, 112, B03404. [Google Scholar] [CrossRef]
- Dill, R.; Dobslaw, H. Numerical simulations of global-scale high-resolution hydrological crustal deformations. J. Geophys. Res. Solid Earth 2013, 118, 5008–5017. [Google Scholar] [CrossRef]
- Jiang, W.; Li, Z.; Van-Dam, T.; Ding, W. Comparative analysis of different environmental loading methods and their impacts on the GPS height time series. J. Geod. 2013, 87, 687–703. [Google Scholar] [CrossRef]
- Nikolaidis, R. Observation of Geodetic and Seismic Deformation with the Global Positioning System; University of California San Diego: San Diego, CA, USA, 2002. [Google Scholar]
- Blewitt, G.; Lavallee, D. Effect of annual signals on geodetic velocity. J. Geophys. Res. 2002, 107, 2145. [Google Scholar] [CrossRef]
- Li, Z.; Yue, J.P.; Li, W.; Lu, D.K. Investigating mass loading contributes of annual GPS observations for the Eurasian plate. J. Geodyn. 2017, 111, 43–49. [Google Scholar] [CrossRef]
- Dill, R. Hydological Model LSDM for Operational Earth Rotation and Gravity Field Variations; Scientific Technical Report STR08/09; GFZ Potsdam: Potsdam, Germany, 2008. [Google Scholar]
- Grinsted, A.; Moore, J.C.; Jevrejeva, S. Application of the cross wavelet transform and wavelet coherence to geophysical time series. Nonlinear Process. Geophys. 2004, 11, 561–566. [Google Scholar] [CrossRef]
- Cooper, G.; Cowan, D. Comparing time series using wavelet-based semblance analysis. Comput. Geosci. 2008, 34, 95–102. [Google Scholar] [CrossRef]
- Ray, J.; Griffiths, J.; Collilieux, X.; Rebischung, P. Subseasonal GNSS positioning errors. Geophys. Res. Lett. 2013, 40, 5854–5860. [Google Scholar] [CrossRef]
- He, X.; Jean-Philippe, M.; Hua, X.; Yu, K.; Jiang, W.; Zhou, F. Noise analysis for environmental loading effect on GPS time series. Acta Geodyn. Geomater. 2017, 185, 131–142. [Google Scholar] [CrossRef]
- Xu, C.; Yue, D. Monte Carlo SSA to detect time-variable seasonal oscillations from GPS-derived site position time series. Tectonophysics 2015, 665, 118–126. [Google Scholar] [CrossRef]
- Bos, M.; Fernandes, R.; Williams, S.; Bastos, L. Fast error analysis of continuous GNSS observations with missing data. J. Geod. 2013, 87, 351–360. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geodetic Software | GAMIT/GIPSY |
|---|---|
| Pole tide | IERS 2003 convention |
| Earth tides | IERS 2003 convention |
| Ocean tidal loading | FES04 model |
| Tropospheric Mapping Function | Global Mapping Function |
| IGS antenna files | Absolute IGS phase center |
| General relativity effect | Periodic clock, gravity bending corrections applied |
| The elevation cut-off angle | 10° and 7° for GAMIT and GIPSY, respectively |
| Data format | 24-h observations sampled at 30 s |
| Site | RMS (GPS) | RMS (AOH) | Site | RMS (GPS) | RMS (AOH) | Site | RMS (GPS) | RMS (AOH) |
|---|---|---|---|---|---|---|---|---|
| ANKR | 7.6 | 5.3 | KUNM | 8.4 | 6.7 | TASH | 10.7 | 7.5 |
| ARTU | 11.2 | 6.1 | LHAZ | 6.1 | 4.4 | TEHN | 6.3 | 3.9 |
| BILI | 8.7 | 6.2 | NOVM | 14.5 | 8.9 | TLSE | 6.3 | 5.2 |
| BJFS | 8.2 | 6.2 | NRIL | 8.6 | 5.7 | URUM | 8.4 | 5.9 |
| BOR1 | 6.7 | 4.3 | ONSA | 6.1 | 5.1 | VILL | 8.5 | 8.3 |
| CHAN | 9.3 | 6.6 | PADO | 5.8 | 4.3 | WUHN | 8.5 | 7.4 |
| CHUM | 9.1 | 6.0 | POLV | 9.0 | 5.2 | YAKT | 8.4 | 7.2 |
| GRAZ | 7.7 | 5.6 | POTS | 8.7 | 6.6 | YEBE | 6.3 | 5.2 |
| IRKT | 11.1 | 8.2 | SHAO | 6.5 | 6.3 | ZECK | 7.9 | 4.9 |
| KIRU | 10.3 | 8.3 | SOFI | 10.0 | 8.9 | ZWE2 | 9.9 | 6.0 |
| Site | ΔRMS% | Site | ΔRMS% | Site | ΔRMS% |
|---|---|---|---|---|---|
| ANKR | 30.2% | KUNM | 20.1% | TASH | 30.2% |
| ARTU | 45.3% | LHAZ | 27.3% | TEHN | 38.0% |
| BILI | 28.8% | NOVM | 38.7% | TLSE | 18.0% |
| BJFS | 23.7% | NRIL | 34.2% | URUM | 29.7% |
| BOR1 | 35.6% | ONSA | 17.1% | VILL | 3.0% |
| CHAN | 28.4% | PADO | 25.7% | WUHN | 9.0% |
| CHUM | 33.9% | POLV | 42.6% | YAKT | 14.6% |
| GRAZ | 27.6% | POTS | 24.1% | YEBE | 18.1% |
| IRKT | 26.2% | SHAO | 4.2% | ZECK | 38.3% |
| KIRU | 18.9% | SOFI | 14.0% | ZWE2 | 39.6% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Yue, J.; Hu, J.; Xiang, Y.; Chen, J.; Bian, Y. Effect of Surface Mass Loading on Geodetic GPS Observations. Appl. Sci. 2018, 8, 1851. https://doi.org/10.3390/app8101851
Li Z, Yue J, Hu J, Xiang Y, Chen J, Bian Y. Effect of Surface Mass Loading on Geodetic GPS Observations. Applied Sciences. 2018; 8(10):1851. https://doi.org/10.3390/app8101851
Chicago/Turabian StyleLi, Zhen, Jianping Yue, Jiyuan Hu, Yunfei Xiang, Jian Chen, and Yankai Bian. 2018. "Effect of Surface Mass Loading on Geodetic GPS Observations" Applied Sciences 8, no. 10: 1851. https://doi.org/10.3390/app8101851
APA StyleLi, Z., Yue, J., Hu, J., Xiang, Y., Chen, J., & Bian, Y. (2018). Effect of Surface Mass Loading on Geodetic GPS Observations. Applied Sciences, 8(10), 1851. https://doi.org/10.3390/app8101851