New Insights into the Short Pitch Corrugation Enigma Based on 3D-FE Coupled Dynamic Vehicle-Track Modeling of Frictional Rolling Contact




Abstract
1. Introduction
2. Model
2.1. FE Model
2.2. Corrugation Model
2.3. Validity of the Model
- (1)
- With respect to the contact problems, a method similar to that of [24] is used herein. This method is suitable for resolving dynamic contact problems, and its validity has been demonstrated by the close reproduction of the evolution of squats [7,48]. Moreover, this method has been verified as suitable for resolving static contact problems based on the established solutions of Hertz, Spence, Cataneo, Mindlin and Kalker [24,49].
- (2)
- To validate the structural dynamics, (a) the approach used in this paper can reproduce the hammer test [50]; thus, the model can simulate measured track receptance based on identified track parameters. (b) Furthermore, the model can simulate axle-box acceleration (ABA) measurements [30,51]. Consequently, the model can capture the dynamics of wheels and tracks and the interaction between the vehicle and the track in the relevant frequency range.
- (3)
- With respect to assessing the validity of the model for a vehicle-track system with direct coupling between the contact problem and structural dynamics, the model exhibits a good representation of the dynamic response (spatial and frequency) of corrugation induced by squats. As noted in [21], “the model provides a good explanation for the development of corrugation initiated from isolated railhead irregularities”. Thus, in this paper, the challenge is to extend the model to the study of the more general type of corrugation that does not present clear local irregularities as the source of corrugation initiation.
3. Contact Solutions at Corrugation
3.1. Normal Contact
3.2. Tangential Contact
4. Wear and Corrugation Simulation
4.1. Wear Model
4.2. Prediction of Major Field Observations
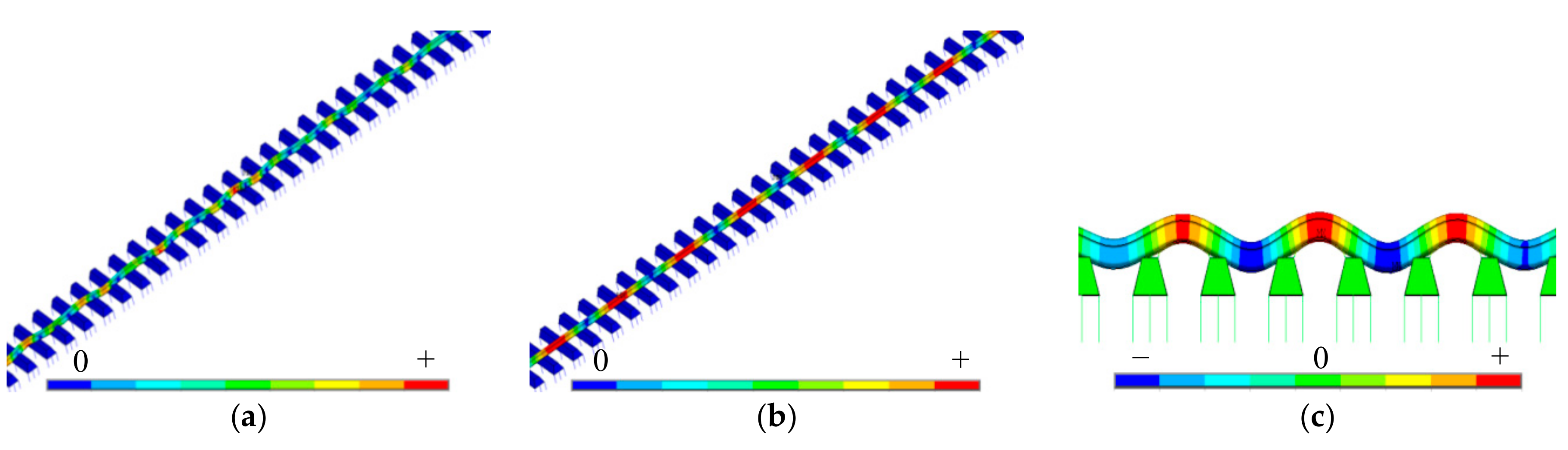
4.3. Analysis of Longitudinal and Vertical Rail Modes
4.4. Additional Comments
5. Relationship between Contact Forces and Wear as well as New Insights
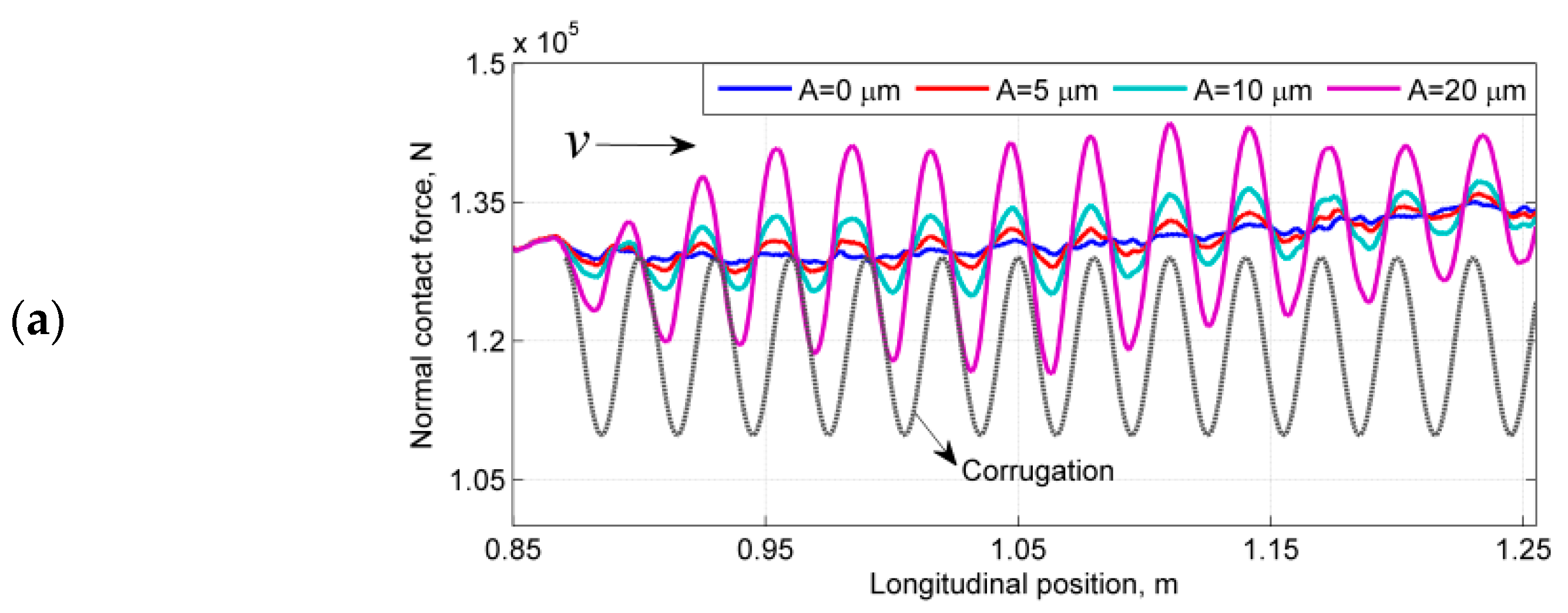
5.1. Normal and Longitudinal Forces Do Not Exactly Follow Corrugation in Wavelength and Phase
5.2. Preferred Frequency of Contact Forces
- (1)
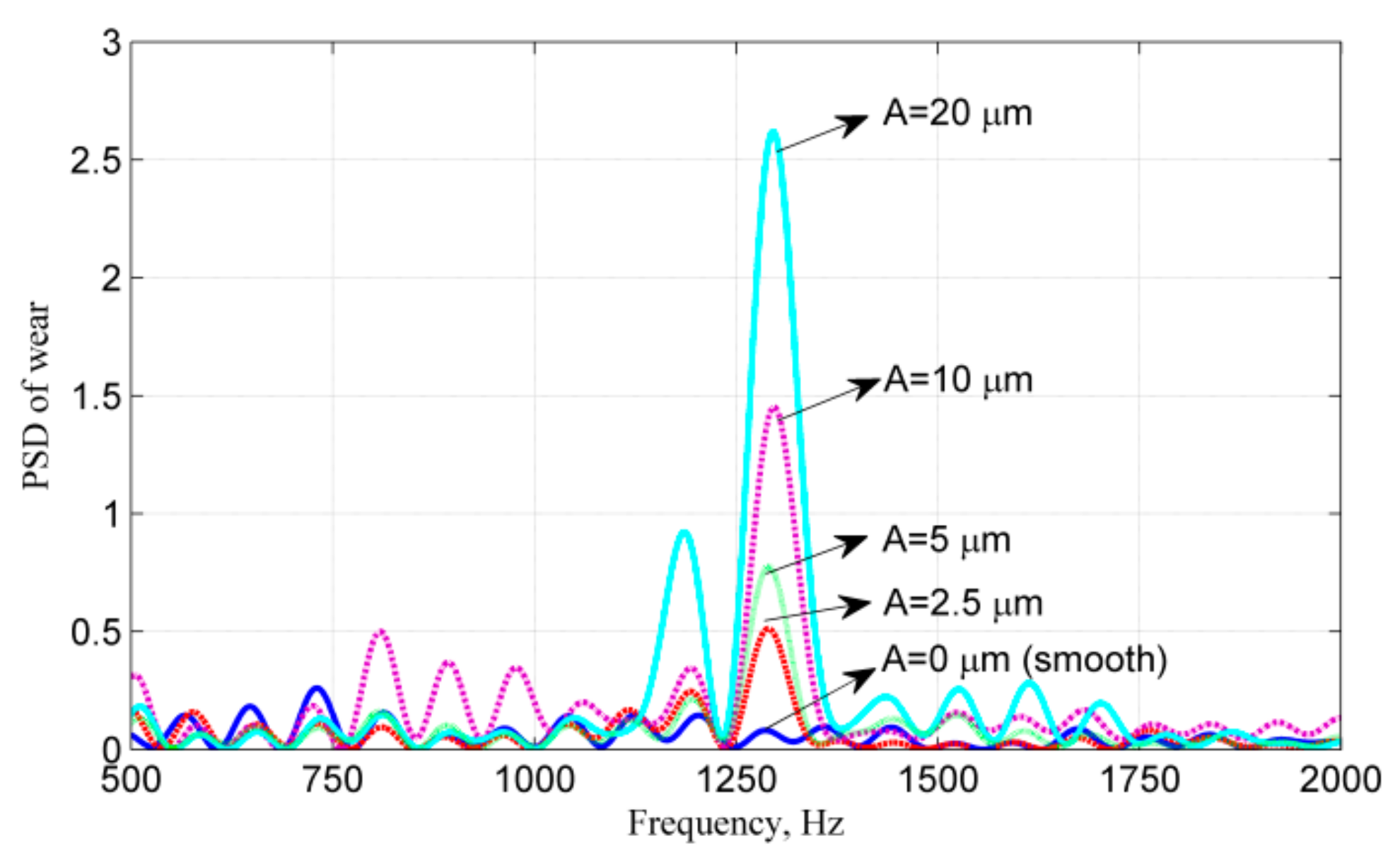
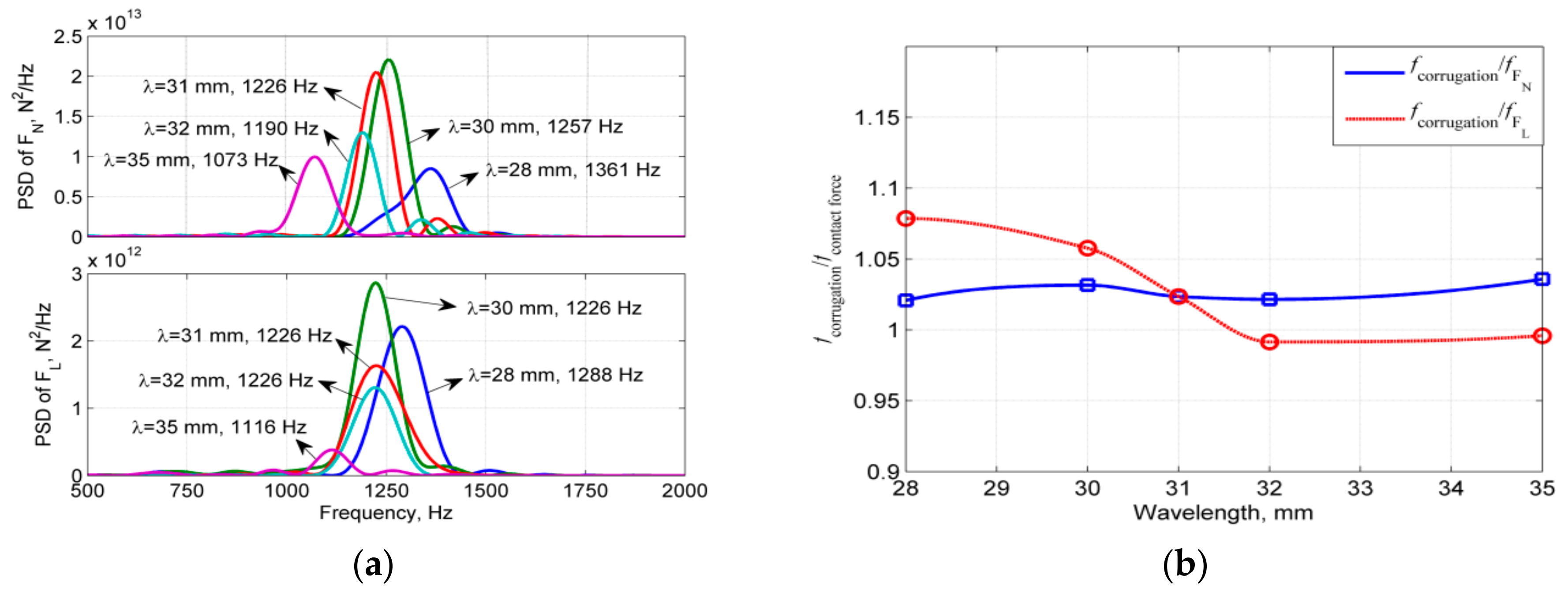
- The frequencies of the normal and longitudinal forces are different. The frequencies of the contact forces are different from that of the excitation, i.e., the passing frequency of the corrugation, and they are sensitive to and change with the corrugation wavelengths. The dynamic forces are stronger at certain wavelengths than others. With the current track parameters, both the longitudinal and vertical contact forces are strongest at λ = 30 mm. This again is in agreement with the observed corrugation wavelength of 30 mm.
- (2)
- The bandwidth of the frequency change of the longitudinal force is between 1116 Hz and 1288 Hz (Figure 12a), which is narrower than that of the normal force (between 1073 and 1361 Hz). The frequency band of the vertical force is broader because it follows the change in the corrugation wavelength, as shown in Figure 12b for the relatively constant ratio of the corrugation passing frequency to the contact force frequency. The frequency of the longitudinal contact force is lower than that of the normal contact force when the corrugation wavelength is short, i.e., between λ = 28 mm and 31 mm (Figure 12b), and vice versa when the corrugation wavelength is longer than 31 mm.
- (3)
- The frequency of the normal contact force is always lower than that of the excitation (Figure 12b). The presence of corrugation is an excitation mainly in the normal direction; thus, the response always follows the excitation. However, the frequency of the longitudinal contact force can be lower or higher than that of the excitation, which likely depends on the nearest natural frequency, as well as the complex relationship between the tangential and normal contact forces. This pattern reveals a strong dependence of the normal contact force on the excitation and a relatively weaker dependence of the longitudinal contact force on the excitation. These dependencies are in line with the narrower band of the frequency change of the longitudinal force compared with the normal force.
- (4)
- In Figure 12b, the frequency of the longitudinal contact force has the largest deviation from the corrugation passing frequency when the wavelength is shorter, i.e., at λ = 28 mm. With increasing λ, the deviation decreases. At approximately λ = 31.5 mm, the frequency of the longitudinal contact force equals the passing frequency. The longitudinal contact force subsequently follows the excitation closely.
- (5)
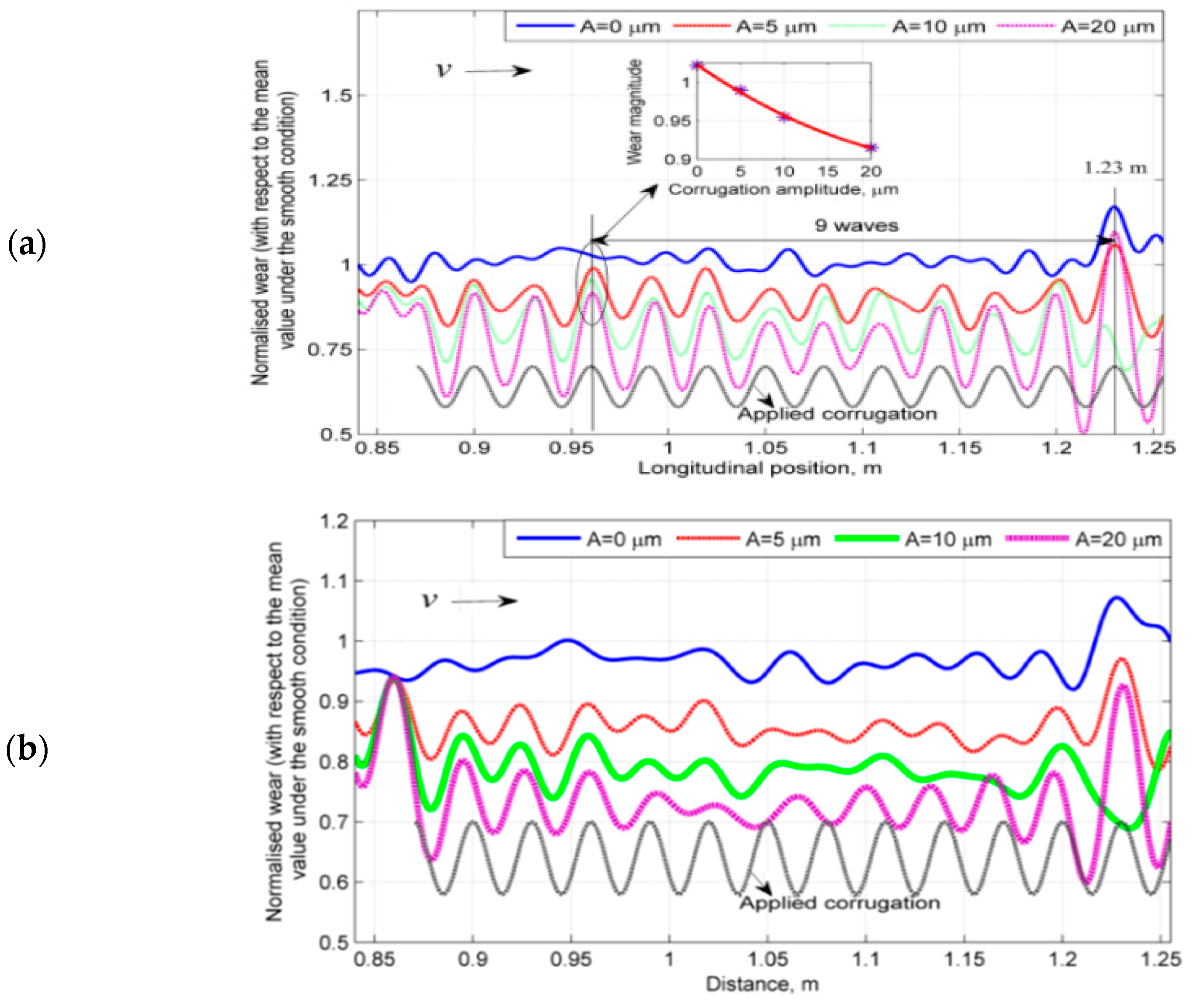
- The frequency curves (Figure 12b) of the normal and longitudinal contact forces cross each other at a wavelength of 31 mm, where the frequencies of the normal and longitudinal forces are equal. Is an equal frequency of the two forces a condition for the corrugation to initiate, grow and become a wavelength-fixing mechanism? As shown in Section 4.2 and Section 5.1, the wear is strongest when the normal and longitudinal forces FN and FL are in phase at 1.23 m. Because an equal frequency is a necessary condition for FN and FL to be in phase over many wavelengths, it is indeed a favorable condition for corrugation development.
5.3. Frequencies Converge to Develop Uniform Corrugation
5.4. Importance of the Proposed Modeling Approach and Track Parameters
5.5. Additional Discussions
6. Conclusions and Future Work
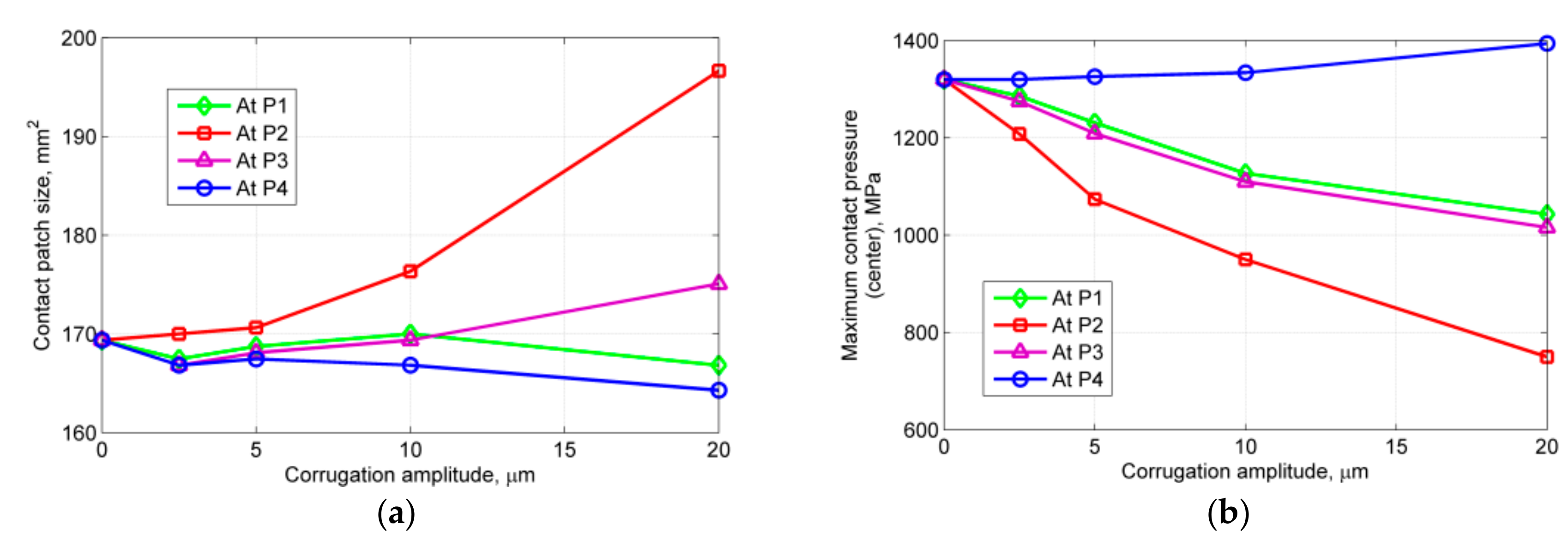
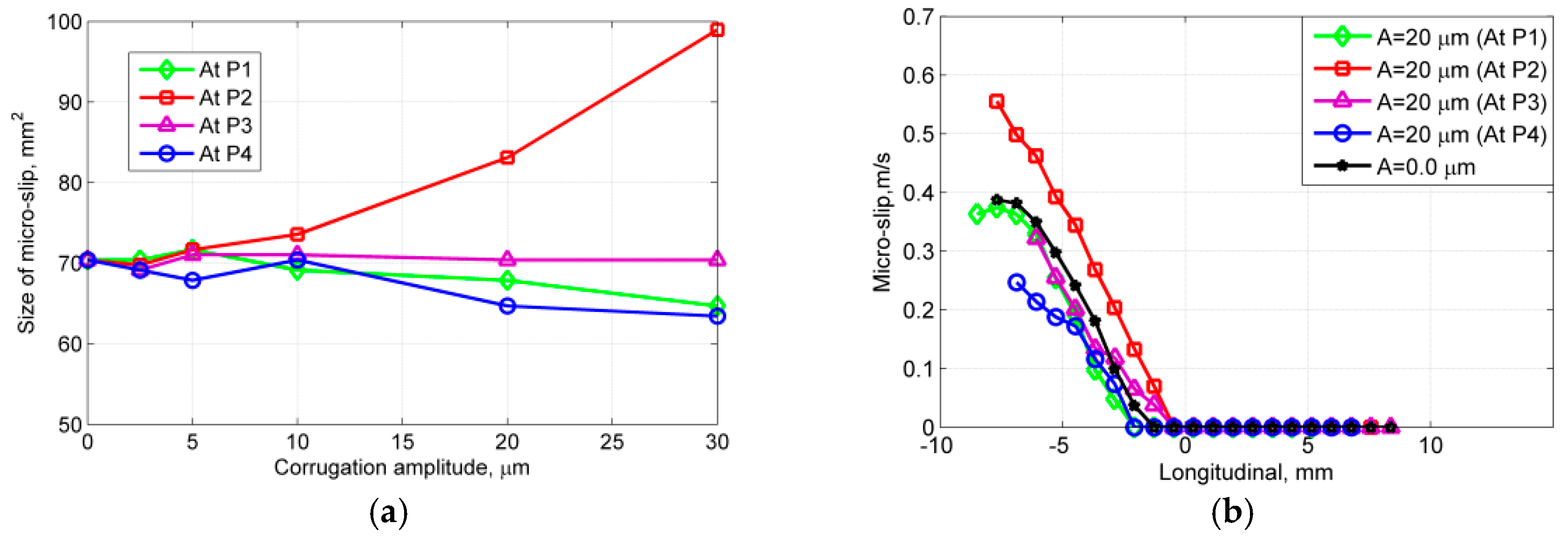
- -
- Along the longitudinal centerline of the contact patch, increases in the contact area, maximum pressure, shear stress and micro-slips at the corrugation crest are small, and some of them even decrease with increases in the corrugation amplitude. However, changes at the trough are large. The large micro-slip and the significantly reduced contact pressure at the trough are the major contributions to the differential wear, which causes corrugation initiation and growth. The dependence of the normal contact force on corrugation excitation is strong, and the dependence of the longitudinal contact force on excitation is relatively weak.
- -
- In addition to the commonly-accepted hypothesis for corrugation studies, i.e., the vertical vibration modes of the vehicle-track system determine the development of corrugation, it is found that the longitudinal vibration modes are also important. Longitudinal modes are likely to be important for the initiation of corrugation, and when the corrugation amplitude is sufficiently large, the vertical modes will be dominant. For intermediate situations, the longitudinal and vertical modes together determine whether the corrugation will grow or be suppressed by wear depending on whether the wear is of the necessary consistent frequency and phase.
- -
- The main frequencies of the vertical and longitudinal vibration modes and contact forces, as well as the resulting wear are different. Consequently, a condition (that might not be unique) for corrugation to consistently initiate and grow should be that the longitudinal and vertical main frequencies are consistent. This consistency may be achieved by the control of certain track parameters, for instance by properly constraining the rail fastening.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Grassie, S.L. Rail corrugation: Characteristics, causes, and treatments. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2009, 223, 581–596. [Google Scholar] [CrossRef]
- Sato, Y.; Matsumoto, A.; Knothe, K.L. Review on rail corrugation studies. Wear 2002, 253, 130–139. [Google Scholar] [CrossRef]
- Afferrante, L.; Ciavarella, M. Short pitch corrugation of railway tracks with wooden or concrete sleepers: An enigma solved? Tribol. Int. 2010, 43, 610–622. [Google Scholar] [CrossRef]
- Meehan, P.A.; Bellette, P.A.; Horwood, R.J. “Does god play dice with corrugations?”: Environmental effects on growth. Wear 2014, 314, 254–260. [Google Scholar] [CrossRef]
- Giannakos, K. Modeling the influence of short wavelength defects in a railway track on the dynamic behavior of the non-suspended masses. Mech. Syst. Signal Process. 2016, 68, 68–83. [Google Scholar] [CrossRef]
- Tavares de Freitas, R.; Kaewunruen, S. Life Cycle Cost Evaluation of Noise and Vibration Control Methods at Urban Railway Turnouts. Environments 2016, 3, 34. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, X.; Esveld, C.; Dollevoet, R.; Molodova, M. An investigation into the causes of squats-correlation analysis and numerical modelling. Wear 2008, 265, 1349–1355. [Google Scholar] [CrossRef]
- Nielsen, J.C.O. Numerical prediction of rail roughness growth on tangent railway tracks. J. Sound Vib. 2003, 267, 537–548. [Google Scholar] [CrossRef]
- Xie, G.; Iwnicki, S.D. Calculation of wear on a corrugated rail using a three-dimensional contact model. Wear 2008, 265, 1238–1248. [Google Scholar] [CrossRef]
- Böhmer, A.; Klimpel, T. Plastic deformation of corrugated rails—A numerical approach using material data of rail steel. Wear 2002, 253, 150–161. [Google Scholar] [CrossRef]
- Baumann, G.; Fecht, H.J.; Liebelt, S. Formation of white-etching layers on rail treads. Wear 1996, 191, 133–140. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, X.; Dollevoet, R.; Molodova, M. Differential wear and plastic deformation as causes of squat at track local stiffness change combined with other track short defects. Veh. Syst. Dyn. 2008, 46, 237–246. [Google Scholar] [CrossRef]
- Saulot, A.; Descartes, S.; Berthier, Y. Sharp curved track corrugation: From corrugation observed on-site, to corrugation reproduced on simulators. Tribol. Int. 2009, 42, 1691–1705. [Google Scholar] [CrossRef]
- Kalker, J.J. Three-Dimensional Elastic Bodies in Rolling Contact; Kluwer: Dordrecht, The Netherlands, 1990. [Google Scholar]
- Li, Z. Wheel-Rail Rolling Contact and Its Application to Wear Simulation. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2002. [Google Scholar]
- Nielsen, J.B. Evolution of rail corrugation predicted with a nonlinear wear model. J. Sound Vib. 1999, 227, 915–933. [Google Scholar] [CrossRef]
- Shen, Z.; Li, Z. A fast non-steady state creep force model based on the simplified theory. Wear 1996, 191, 242–244. [Google Scholar] [CrossRef]
- Knothe, K.; Groß-Thebing, A. Short wavelength rail corrugation and non-steady-state contact mechanics. Veh. Syst. Dyn. 2008, 46, 49–66. [Google Scholar] [CrossRef]
- Ilias, H. The influence of railpad stiffness on wheelset/track interaction and corrugation growth. J. Sound Vib. 1999, 227, 935–948. [Google Scholar] [CrossRef]
- Jin, X.; Wen, Z. Effect of discrete track support by sleepers on rail corrugation at a curved track. J. Sound Vib. 2008, 315, 279–300. [Google Scholar] [CrossRef]
- Grassie, S.L. Squats and squat-type defects in rails: The understanding to date. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2012, 226, 235–242. [Google Scholar] [CrossRef]
- Hempelmann, K.; Knothe, K. An extended linear model for the prediction of short pitch corrugation. Wear 1996, 191, 161–169. [Google Scholar] [CrossRef]
- Saulot, A.; Baillet, L. Dynamic finite element simulations for understanding wheel-rail contact oscillatory states occurring under sliding conditions. J. Tribol. ASME 2006, 128, 761–770. [Google Scholar] [CrossRef]
- Zhao, X.; Li, Z. The solution of frictional wheel-rail rolling contact with a 3D transient finite element model: Validation and error analysis. Wear 2011, 271, 444–452. [Google Scholar] [CrossRef]
- Nishiura, D.; Sakaguchi, H.; Aikawa, A. Development of Viscoelastic Multi-Body Simulation and Impact Response Analysis of a Ballasted Railway Track under Cyclic Loading. Materials 2017, 10, 615. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Li, Z.; Dollevoet, R. Wear study of short pitch corrugation using an integrated 3D FE train-track interaction model. In Proceedings of the 9th International Conference on Contact Mechanics and Wear of Rail/Wheel Systems, Chengdu, China, 27–30 August 2012; pp. 216–222. [Google Scholar]
- Zhao, X.; Wen, Z.; Wang, H.; Jin, X.; Zhu, M. Modeling of high-speed wheel-rail rolling contact on a corrugated rail and corrugation development. J. Zhejiang Univ. Sci. A 2014, 15, 946–963. [Google Scholar] [CrossRef]
- Zhao, X.; Li, Z. A three-dimensional finite element solution of frictional wheel-rail rolling contact in elasto-plasticity. Proc. Inst. Mech. Eng. Part F J. Eng. Tribol. 2015, 229, 86–100. [Google Scholar] [CrossRef]
- Hiensch, M.; Nielson, J.C.O.; Verherjen, E. Rail corrugation in The Netherlands—Measurements and simulations. Wear 2002, 253, 140–149. [Google Scholar] [CrossRef]
- Molodova, M.; Li, Z.; Núñez, A.; Dollevoet, R. Validation of a finite element model for axle box acceleration at squats in the high frequency range. Comput. Struct. 2014, 141, 84–93. [Google Scholar] [CrossRef]
- Arias-Cuevas, O.; Li, Z.; Lewis, R. Investigating the lubricity and electrical insulation caused by sanding in dry wheel-rail contacts. Tribol. Lett. 2010, 37, 623–635. [Google Scholar] [CrossRef]
- Cann, P.M. The ‘‘leaves on the line’’ problem—A study of leaf residue film formation and lubricity under laboratory test conditions. Tribol. Lett. 2006, 24, 151–158. [Google Scholar] [CrossRef]
- Courant, R.; Friedrichs, K.O.; Lewy, H. On the partial difference equations of mathematical physics. IBM J. 1967, 11, 215–234. [Google Scholar] [CrossRef]
- Benson, D.J.; Hallquist, J.O. A single surface contact algorithm for the post buckling analysis of shell structures. Comput. Methods Appl. Mater Eng. 1990, 78, 141–163. [Google Scholar] [CrossRef]
- Popovici, R. Friction in Wheel-Rail Contacts. Ph.D. Thesis, University of Twente, Enschede, The Netherlands, 2010. [Google Scholar]
- Bhushan, B. Modern Tribology Handbook: Principles of Tribology; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Oostermeijer, K.H. Review on short pitch rail corrugation studies. Wear 2008, 265, 1231–1237. [Google Scholar] [CrossRef]
- Liu, Q.; Zhang, B.; Zhou, Z. An experimental study of rail corrugation. Wear 2003, 255, 1121–1126. [Google Scholar] [CrossRef]
- Collette, C.; Horodinca, M.; Preumont, A. Rotational vibration absorber for the mitigation of rail rutting corrugation. Veh. Syst. Dyn. 2009, 47, 641–659. [Google Scholar] [CrossRef]
- Tassilly, E.; Vincent, N. A linear model for the corrugation of rails. J. Sound Vib. 1991, 150, 25–45. [Google Scholar] [CrossRef]
- Li, W.; Wang, H.; Wen, Z.; Du, X.; Wu, L.; Li, X.; Jin, X. An investigation into the mechanism of metro rail corrugation using experimental and theoretical methods. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 1025–1039. [Google Scholar] [CrossRef]
- Hayes, W.F.; Tucker, H.G. Wheelset-track resonance as a possible source of corrugation wear. Wear 1991, 144, 211–226. [Google Scholar] [CrossRef]
- Suda, Y.; Komine, H.; Iwasa, T.; Terumichi, Y. Experimental study on mechanism of rail corrugation using corrugation simulator. Wear 2002, 253, 162–171. [Google Scholar] [CrossRef]
- Jin, X.; Xiao, X.; Wen, Z.; Zhou, Z. Effect of sleeper pitch on rail corrugation at a tangent track in vehicle hunting. Wear 2008, 265, 1163–1175. [Google Scholar] [CrossRef]
- Grassie, S.L.; Johnson, K.L. Periodic microslip between a rolling wheel and a corrugated rail. Wear 1985, 101, 291–309. [Google Scholar] [CrossRef]
- Bellette, P.A.; Meehan, P.A.; Daniel, W.J.T. Effects of variable pass speed on wear-type corrugation growth. J. Sound Vib. 2008, 314, 616–634. [Google Scholar] [CrossRef]
- Knothe, K.L.; Grassie, S.L. Modelling of railway track and vehicle/track interaction at high frequencies. Veh. Syst. Dyn. 1993, 22, 209–262. [Google Scholar] [CrossRef]
- Li, Z.; Dollevoet, R.; Molodova, M.; Zhao, X. Squat growth—Some observations and the validation of numerical predictions. Wear 2011, 271, 148–157. [Google Scholar] [CrossRef]
- Wei, Z.; Li, Z.; Qian, Z.; Chen, R.; Dollevoet, R. 3D FE modelling and validation of frictional contact with partial slip in compression-shift-rolling evolution. Int. J. Rail Transp. 2015, 4, 20–36. [Google Scholar] [CrossRef]
- Oregui, M.; Li, Z.; Dollevoet, R. An investigation into the vertical dynamics of tracks with monoblock sleepers with a 3D finite-element model. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 891–908. [Google Scholar] [CrossRef]
- Molodova, M. Detection of Early Squats by Axle Box Acceleration. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2013. [Google Scholar]
- Feller, H.G.; Waif, K. Surface analysis of corrugated rail treads. Wear 1991, 144, 153–161. [Google Scholar] [CrossRef]
- Jin, X.; Wen, Z.; Wang, K.; Zhang, W. Effect of a scratch on curved rail on initiation and evolution of rail corrugation. Tribol. Int. 2004, 37, 385–394. [Google Scholar] [CrossRef]
- Igeland, A. Railhead corrugation growth explained by dynamic interaction between track and bogie wheelsets. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 1996, 210, 11–20. [Google Scholar] [CrossRef]
- Archard, J.F. Contact and rubbing of at surfaces. J. Appl. Phys. 1953, 24, 981–988. [Google Scholar] [CrossRef]
- Tassilly, E.; Vincent, N. Rail corrugation: Analytical model and field tests. Wear 1991, 144, 163–178. [Google Scholar] [CrossRef]
- Ahlbeck, D.R.; Daniels, L.E. Investigation of rail corrugations on the Baltimore metro. Wear 1991, 144, 197–210. [Google Scholar] [CrossRef]
- Remington, P.J. Wheel/rail noise-part IV: Rolling noise. J. Sound Vib. 1976, 46, 419–436. [Google Scholar] [CrossRef]
- Zhao, X.; Li, Z.; Dollevoet, R. Influence of the fastening modeling on the vehicle-track interaction at singular rail surface defects. J. Comput. Nonliner Dyn. 2014, 9, 031002. [Google Scholar] [CrossRef]
- Meehan, P.A.; Batten, R.D.; Bellette, P.A. The effect of non-uniform train speed distribution on rail corrugation growth in curves/corners. Wear 2016, 366, 27–37. [Google Scholar] [CrossRef]
- Grassie, S.L.; Gregory, R.W.; Harrison, D.; Johnson, K.L. The dynamic response of railway track to high frequency vertical excitation. J. Mech. Eng. Sci. 1982, 24, 77–90. [Google Scholar] [CrossRef]
- Grassie, S.L.; Gregory, R.W.; Johnson, K.L. The dynamic response of railway track to high frequency longitudinal excitation. J. Mech. Eng. Sci. 1982, 24, 97–102. [Google Scholar] [CrossRef]
- Grassie, S.L.; Gregory, R.W.; Johnson, K.L. The behaviour of railway wheelsets and track at high frequencies of excitation. J. Mech. Eng. Sci. 1982, 24, 103–111. [Google Scholar] [CrossRef]
- Egana, J.I.; Vinolas, J.; Seco, M. Investigation of the influence of rail pad stiffness on rail corrugation on a transit system. Wear 2006, 261, 216–224. [Google Scholar] [CrossRef]
- Oregui, M.; Núñez, A.; Dollevoet, R.; Li, Z. Sensitivity analysis of railpad parameters on vertical railway track dynamics. J. Eng. Mech. 2017, 143, 04017011. [Google Scholar] [CrossRef]
- Egana, J.I.; Vinolas, J.; Gil-Negrete, N. Effect of liquid high positive friction (HPF) modifier on wheel-rail contact and rail corrugation. Tribol. Int. 2005, 38, 769–774. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values | ||
|---|---|---|---|---|---|
| Wheel load | 116.8 kN | Wheel and rail material | Young’s modulus | 210 GPa | |
| Primary suspension | Stiffness | 1.15 MN/m | Poisson’s ratio | 0.3 | |
| Damping | 2.5 kNs/m | Density | 7800 kg/m3 | ||
| Rail pad | Stiffness | 1300 MN/m | Sleeper | Young’s modulus | 38.4 GPa |
| Damping | 45 kNs/m | Poisson’s ratio | 0.2 | ||
| Ballast | Stiffness | 45 MN/m | Mass density | 2520 kg/m3 | |
| Damping | 32 kNs/m | Spacing (L) | 0.6 m | ||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Li, Z.; Núñez, A.; Dollevoet, R. New Insights into the Short Pitch Corrugation Enigma Based on 3D-FE Coupled Dynamic Vehicle-Track Modeling of Frictional Rolling Contact. Appl. Sci. 2017, 7, 807. https://doi.org/10.3390/app7080807
Li S, Li Z, Núñez A, Dollevoet R. New Insights into the Short Pitch Corrugation Enigma Based on 3D-FE Coupled Dynamic Vehicle-Track Modeling of Frictional Rolling Contact. Applied Sciences. 2017; 7(8):807. https://doi.org/10.3390/app7080807
Chicago/Turabian StyleLi, Shaoguang, Zili Li, Alfredo Núñez, and Rolf Dollevoet. 2017. "New Insights into the Short Pitch Corrugation Enigma Based on 3D-FE Coupled Dynamic Vehicle-Track Modeling of Frictional Rolling Contact" Applied Sciences 7, no. 8: 807. https://doi.org/10.3390/app7080807
APA StyleLi, S., Li, Z., Núñez, A., & Dollevoet, R. (2017). New Insights into the Short Pitch Corrugation Enigma Based on 3D-FE Coupled Dynamic Vehicle-Track Modeling of Frictional Rolling Contact. Applied Sciences, 7(8), 807. https://doi.org/10.3390/app7080807