An Unsupervised Method of Change Detection in Multi-Temporal PolSAR Data Using a Test Statistic and an Improved K&I Algorithm




Abstract
1. Introduction
2. Materials and Methods
2.1. The Model of PolSAR Data
2.2. The Proposed Method
Test Statistic for the Equality of Two Covariance Matrices
2.3. Improved K&I
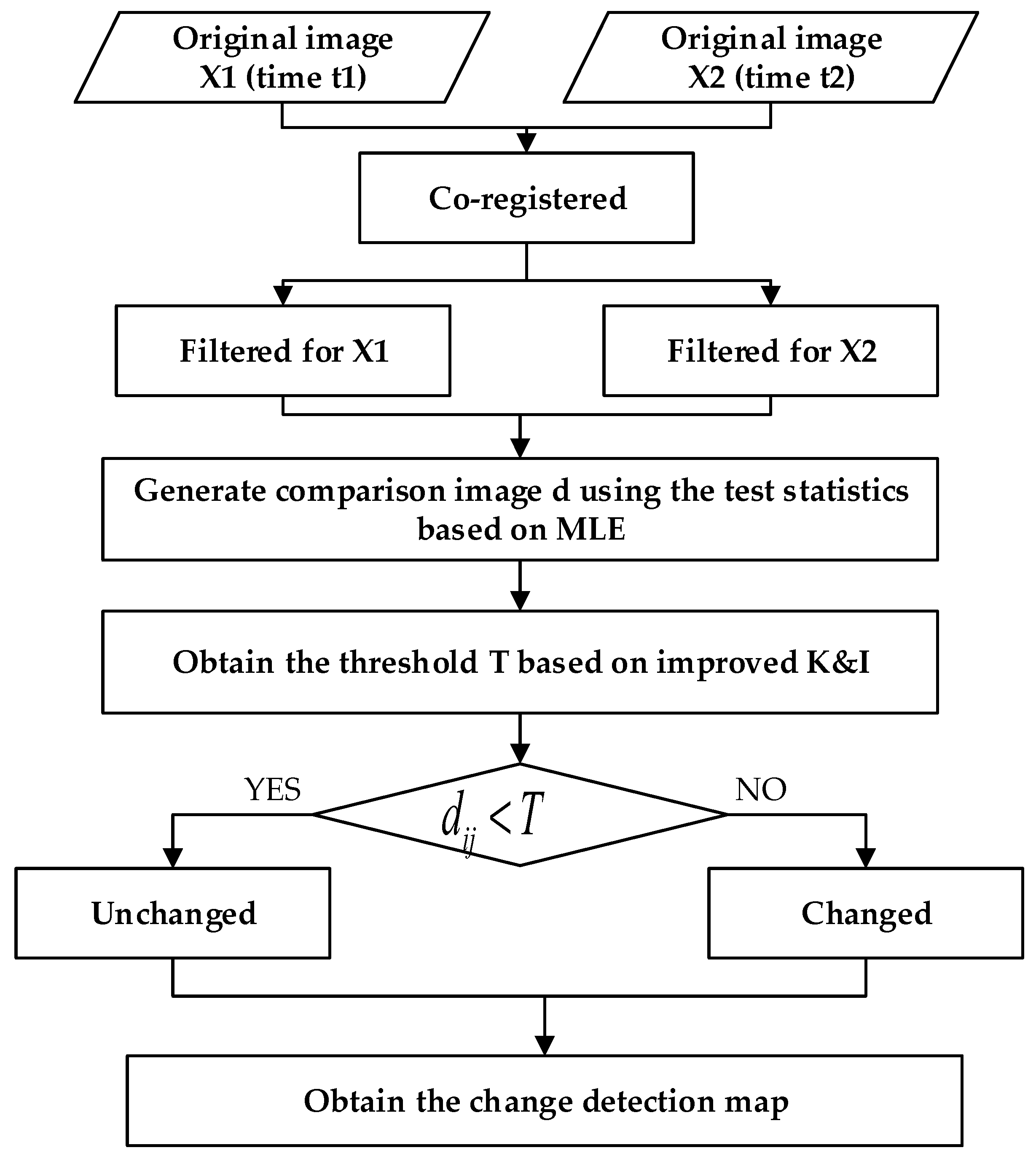
2.4. The Proposed Method
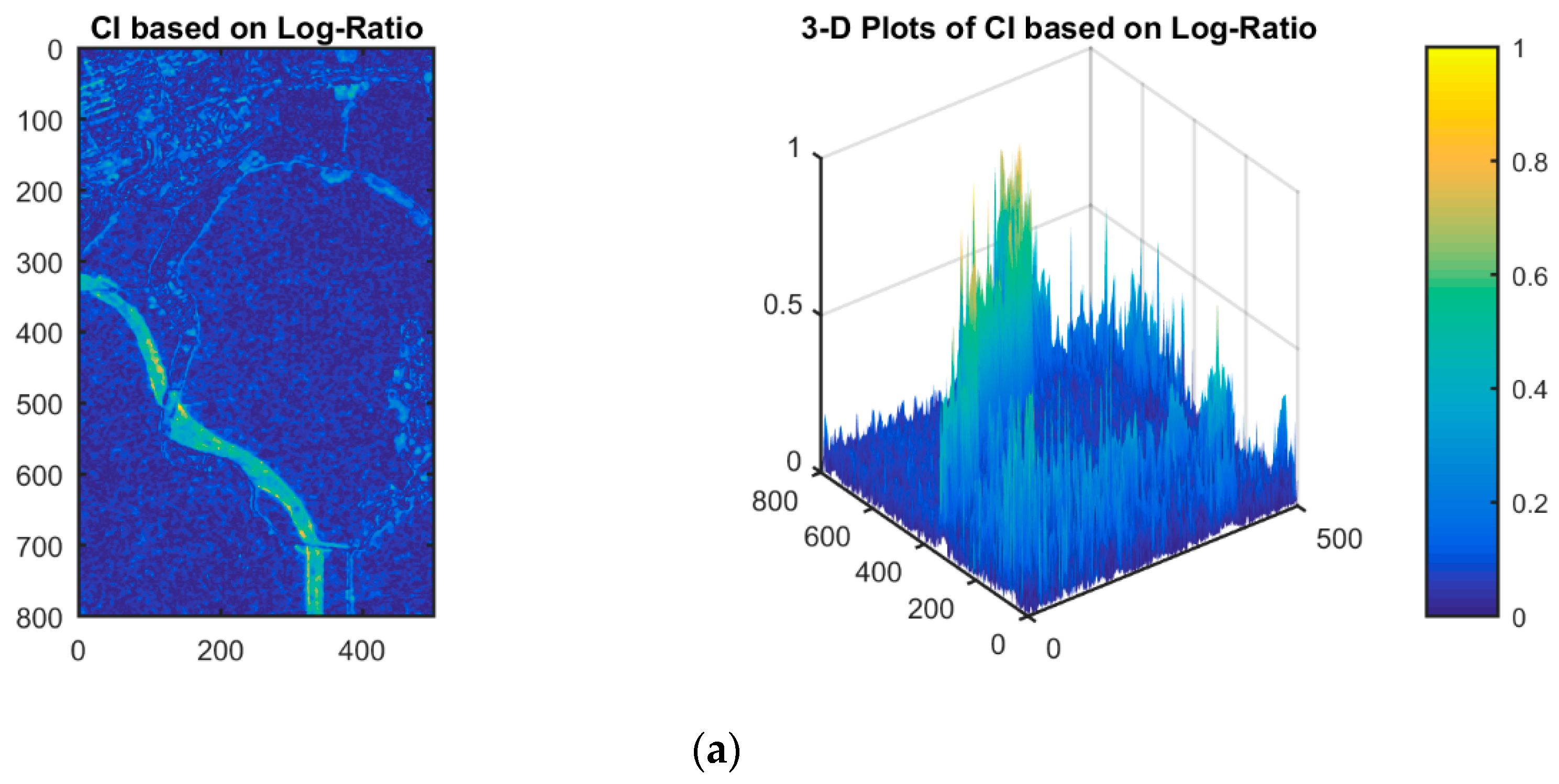
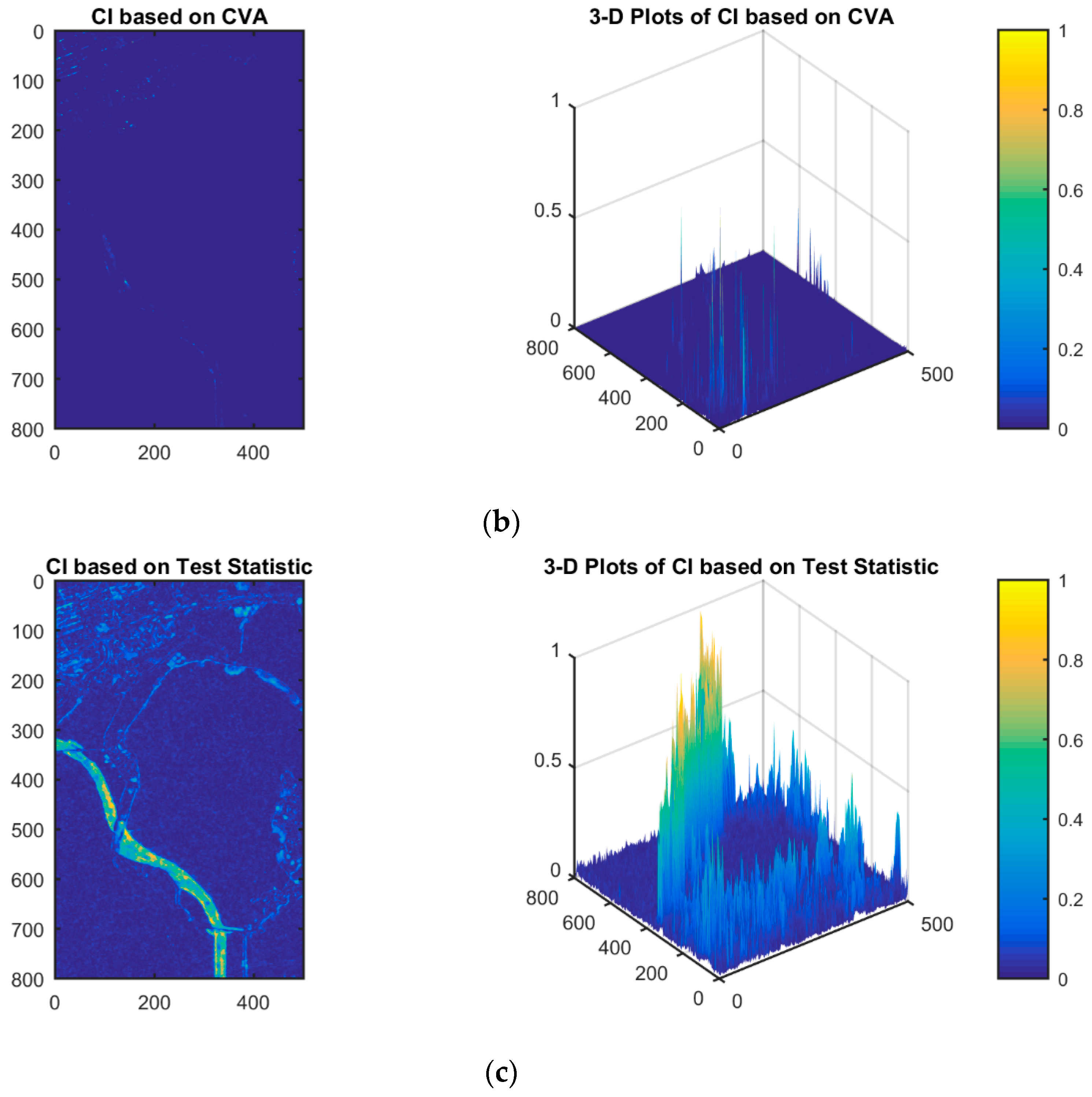
2.5. Evaluation Criterion
3. Results and Discussion
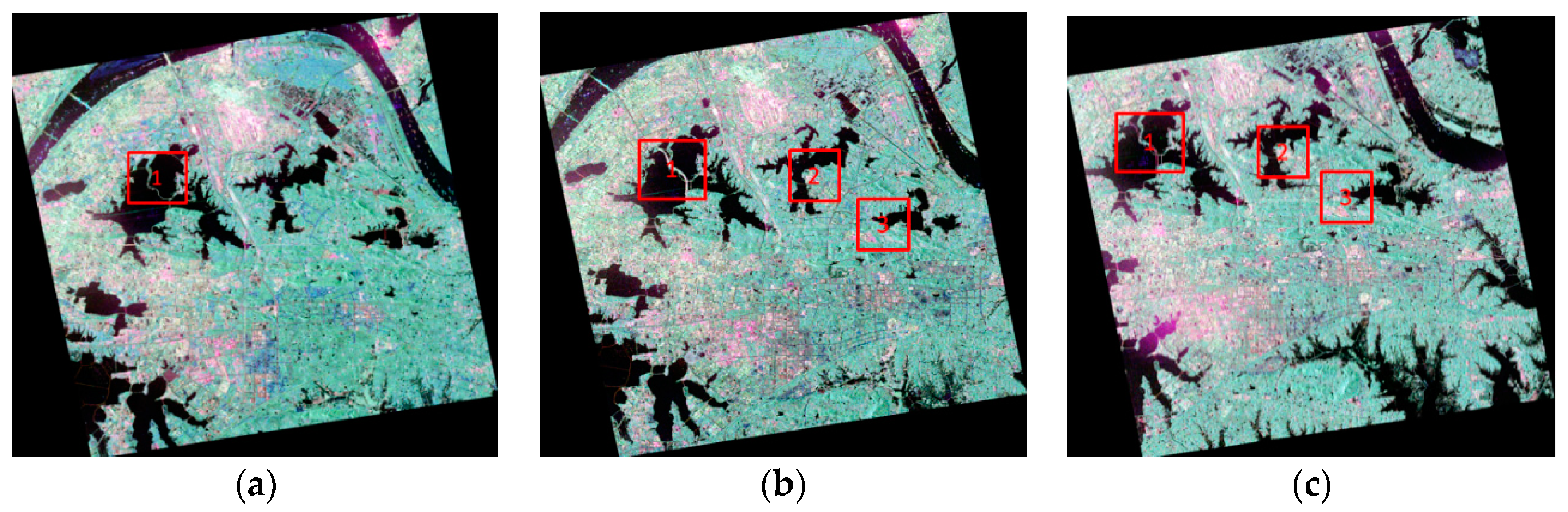
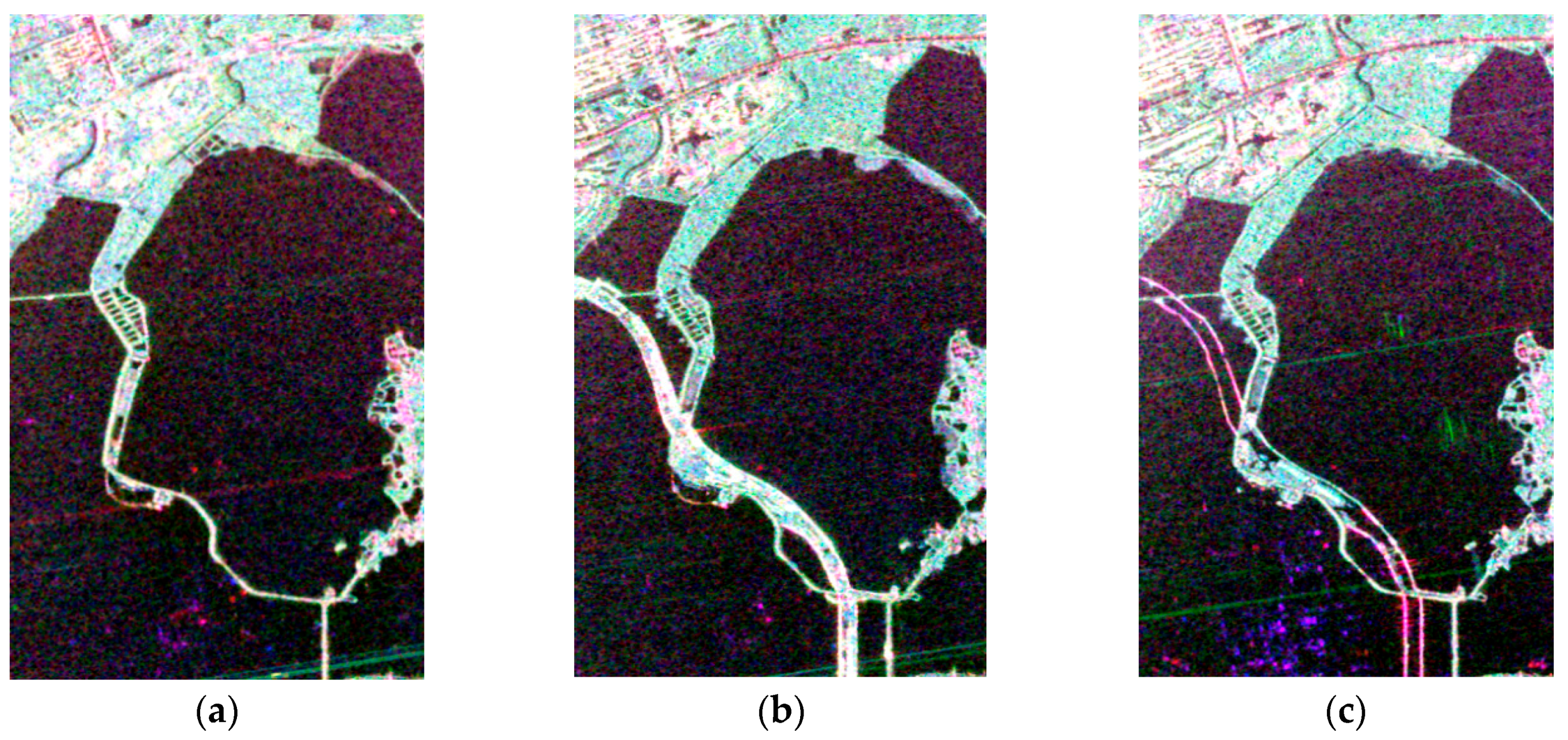
3.1. Study Area and Background
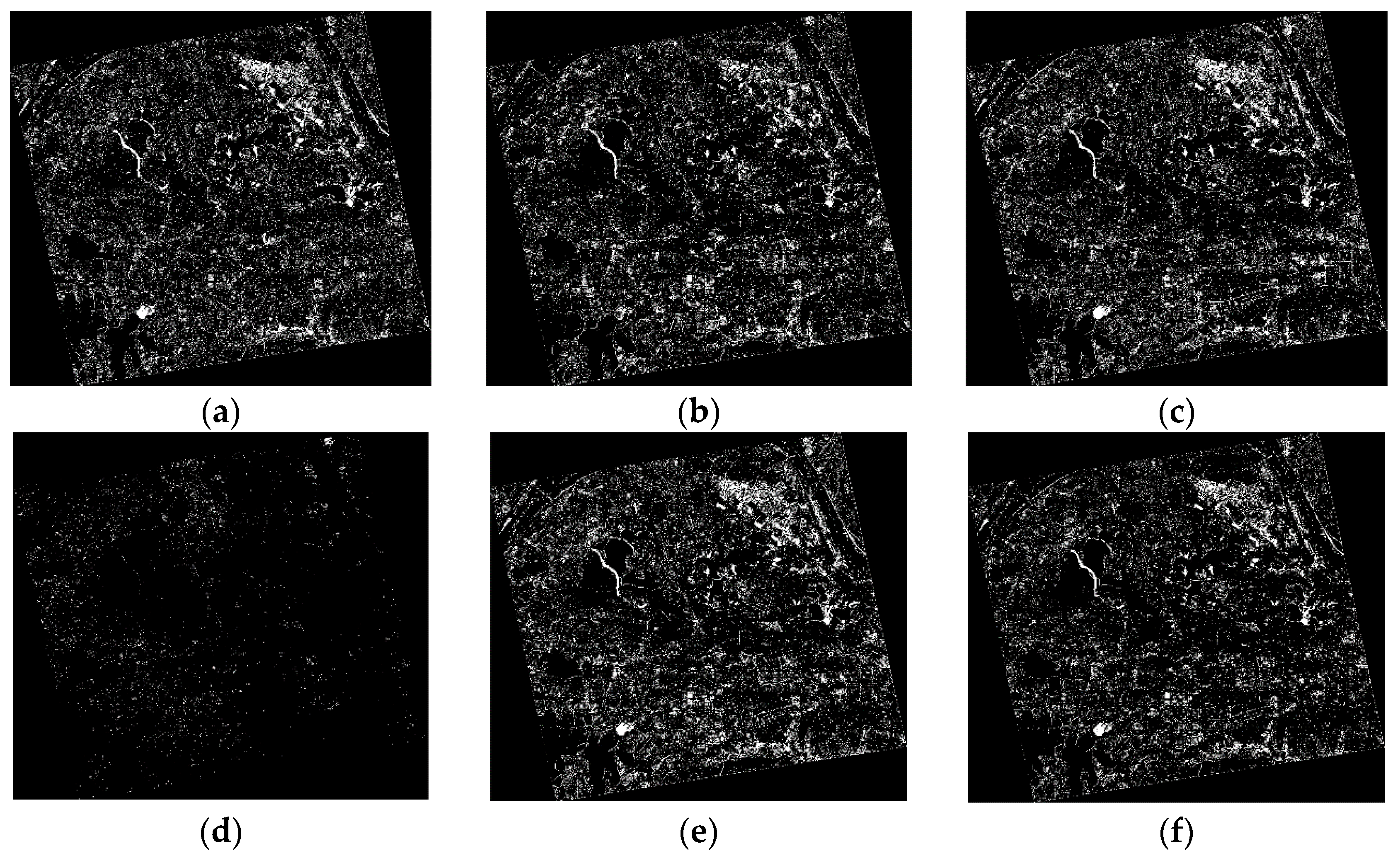
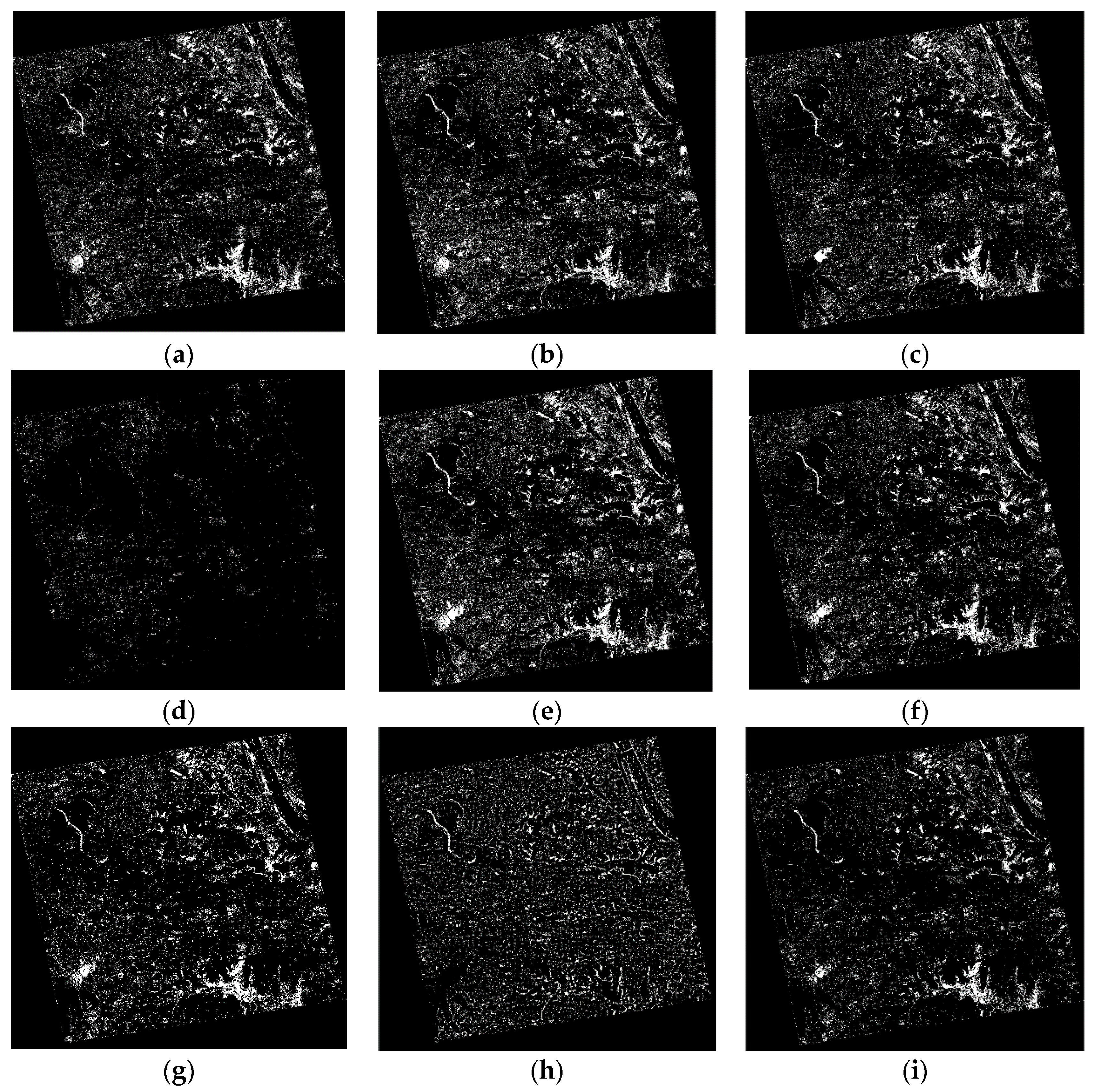
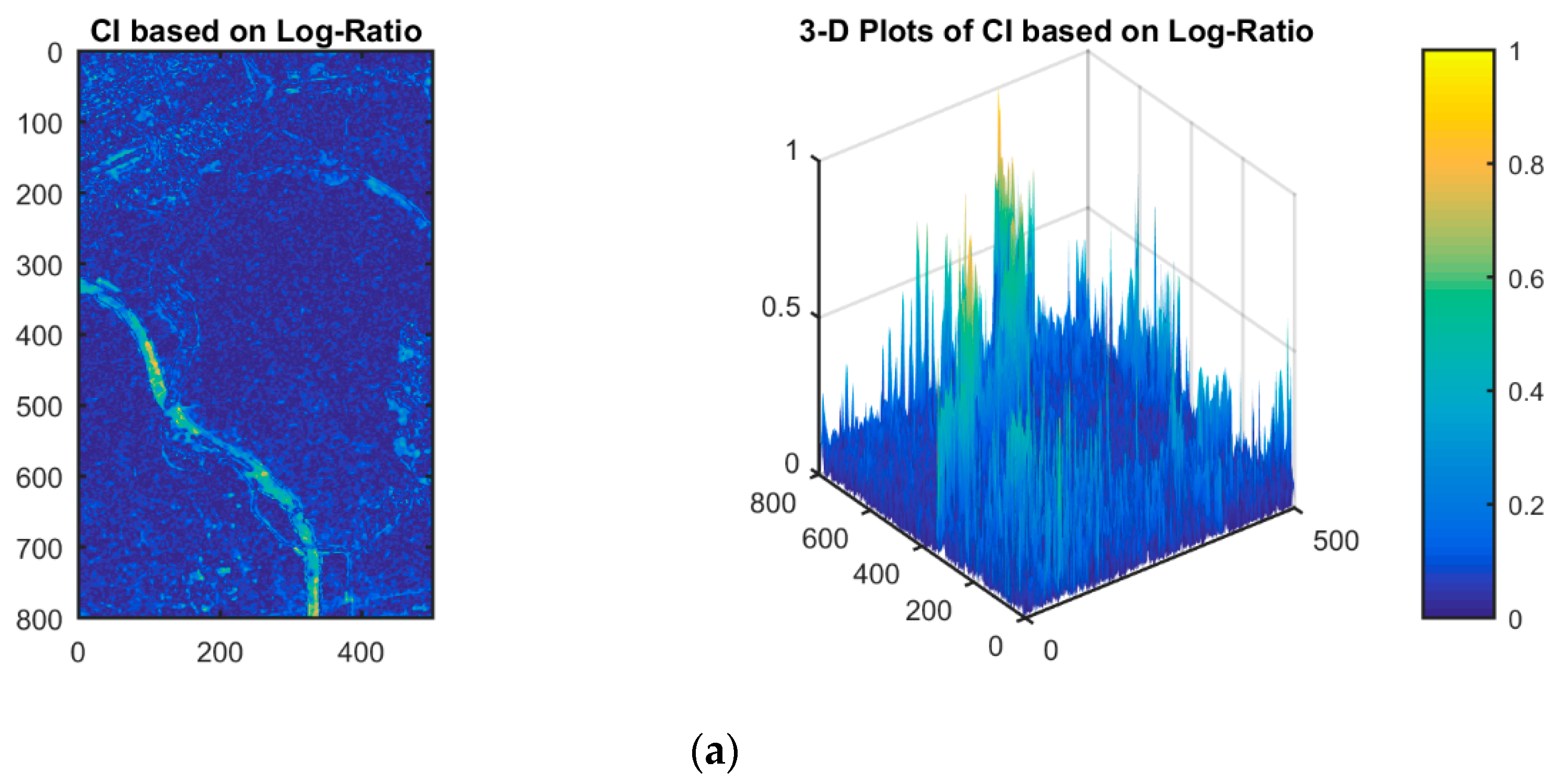
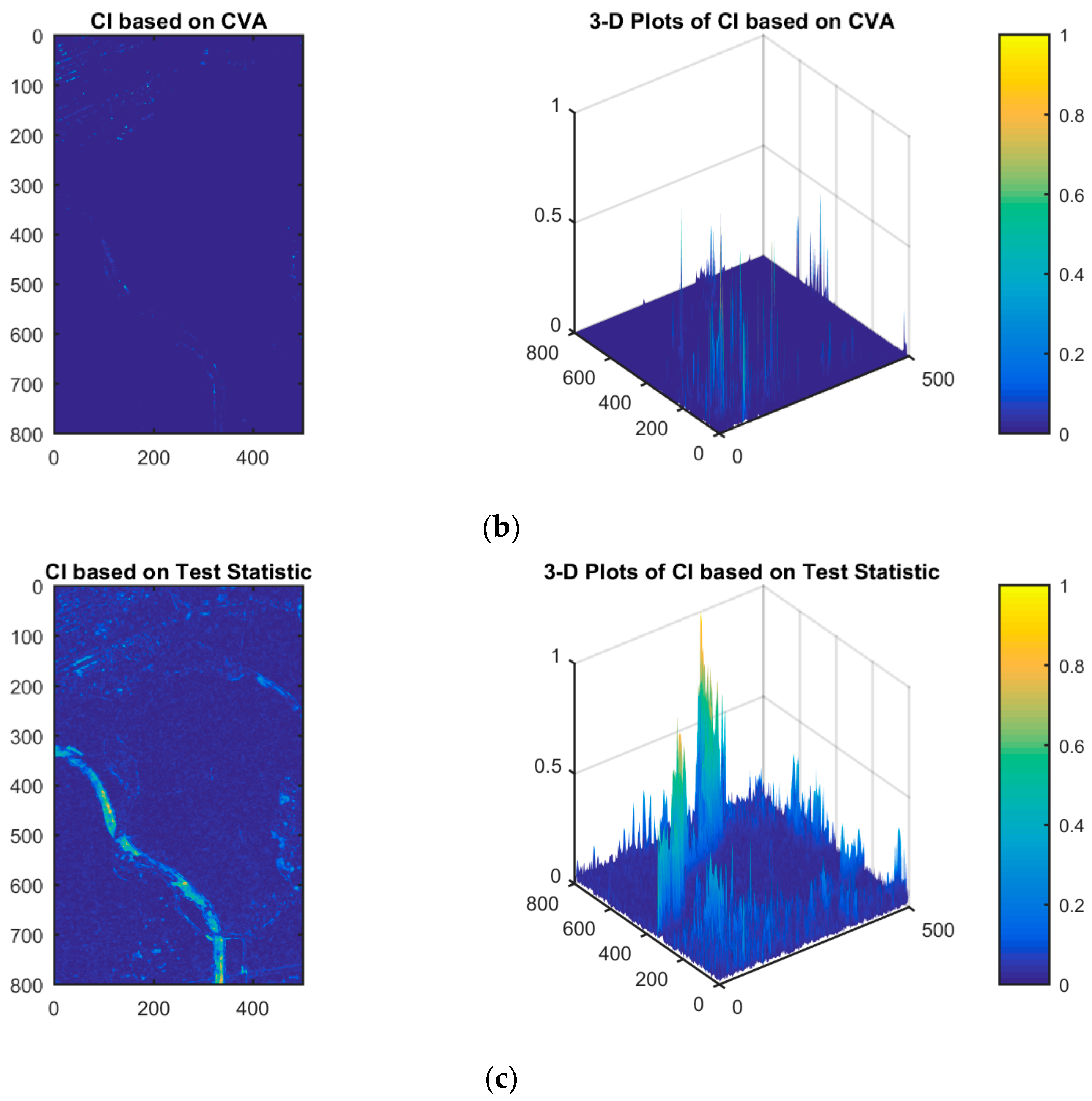
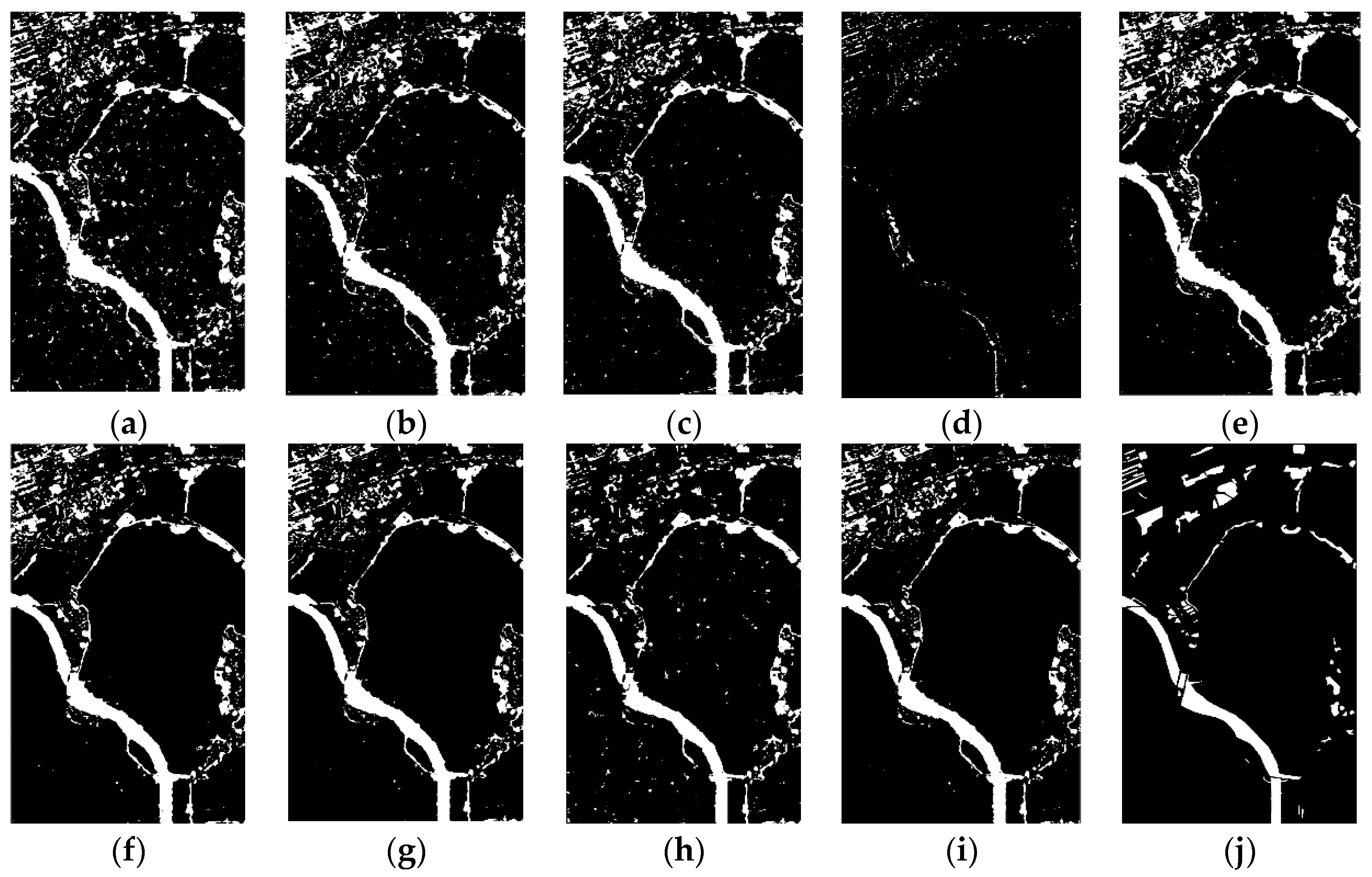
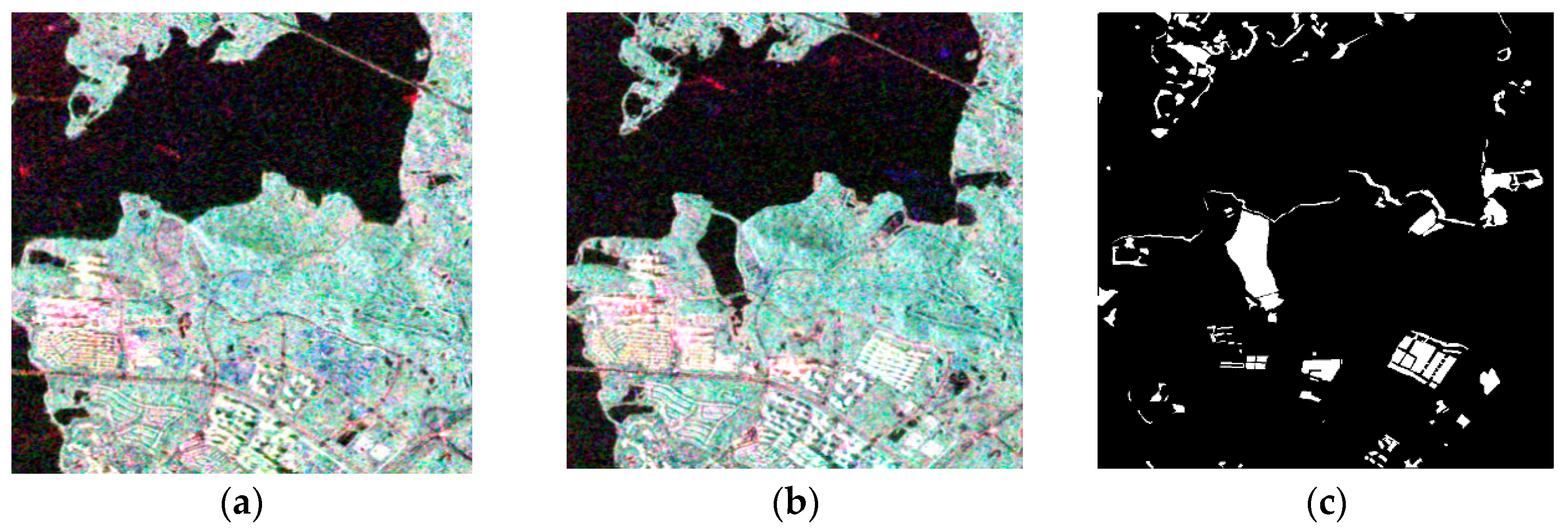
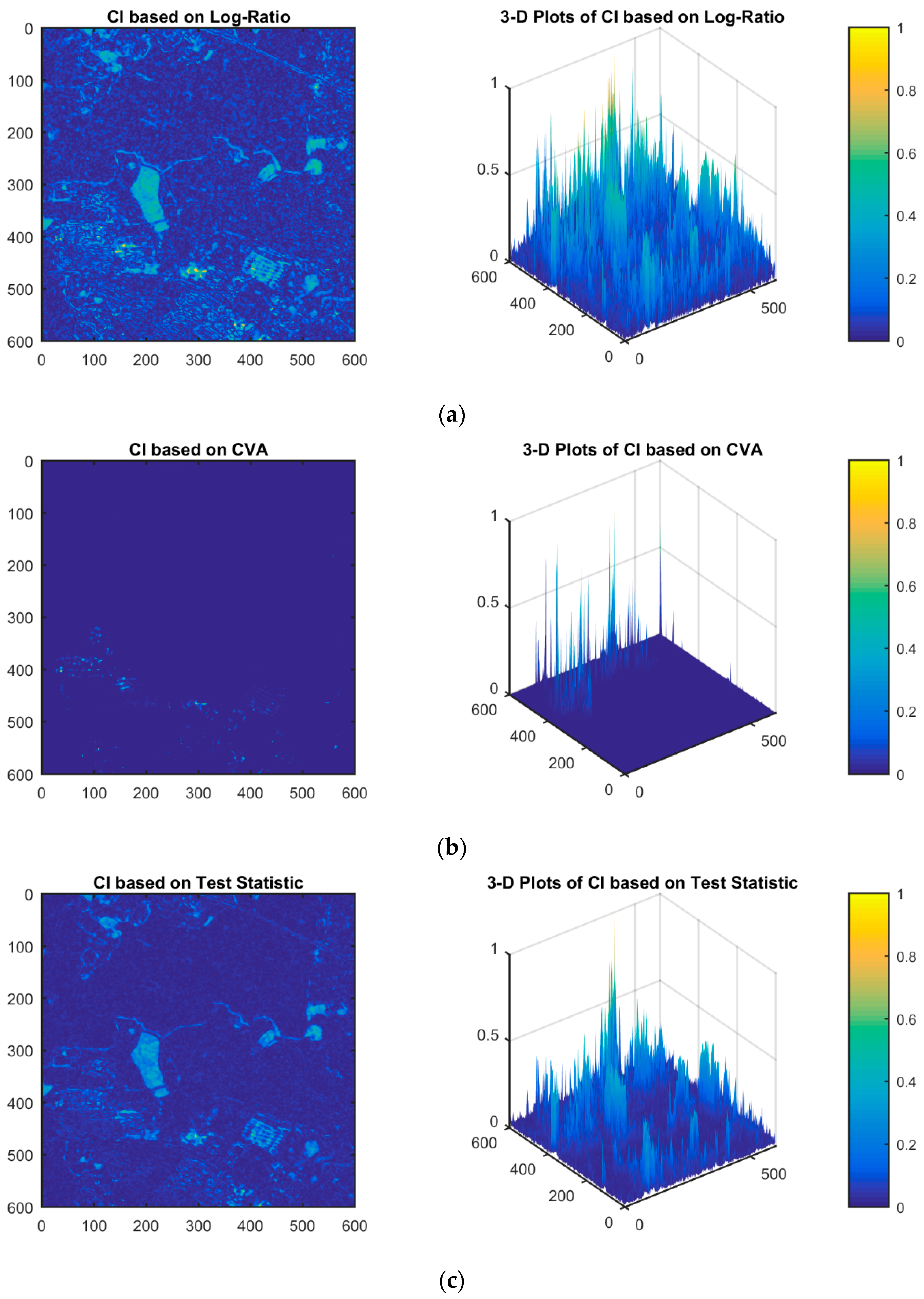
3.3.1. Change Detection Based on the Images from 2011, 2015, and 2016
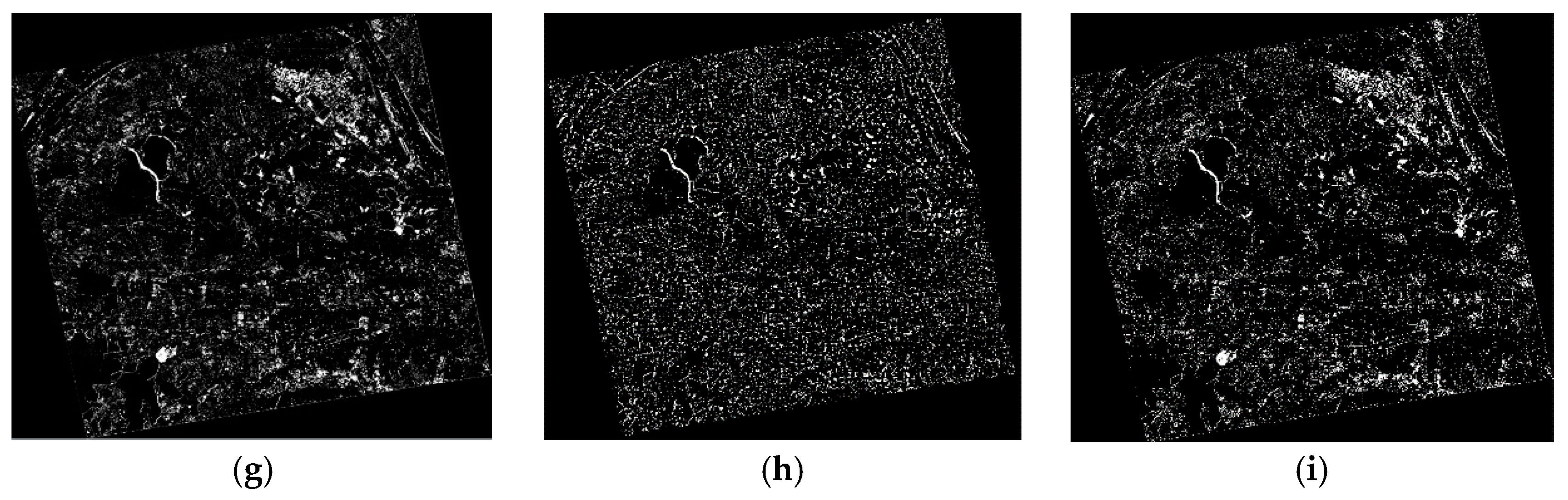
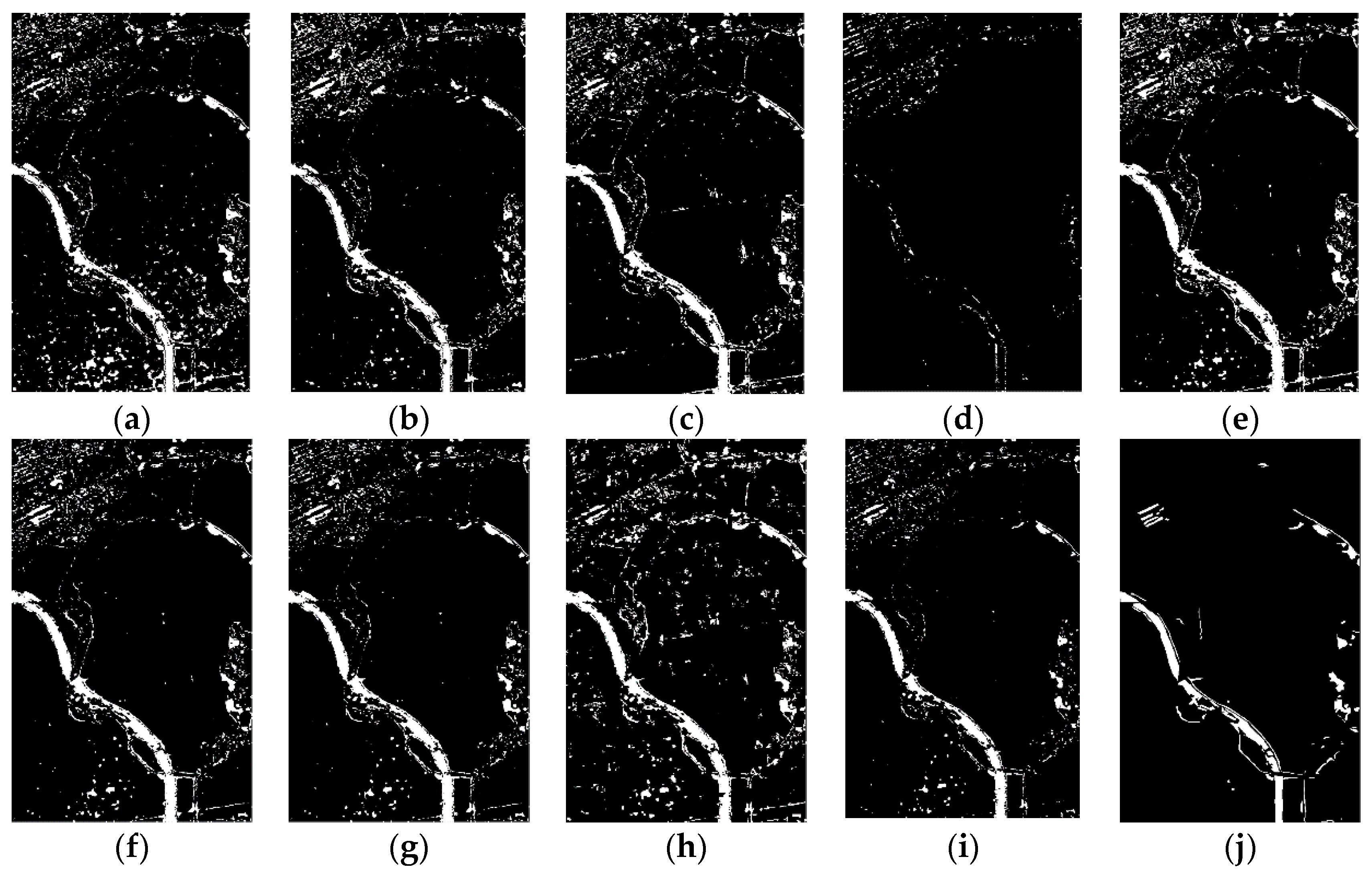
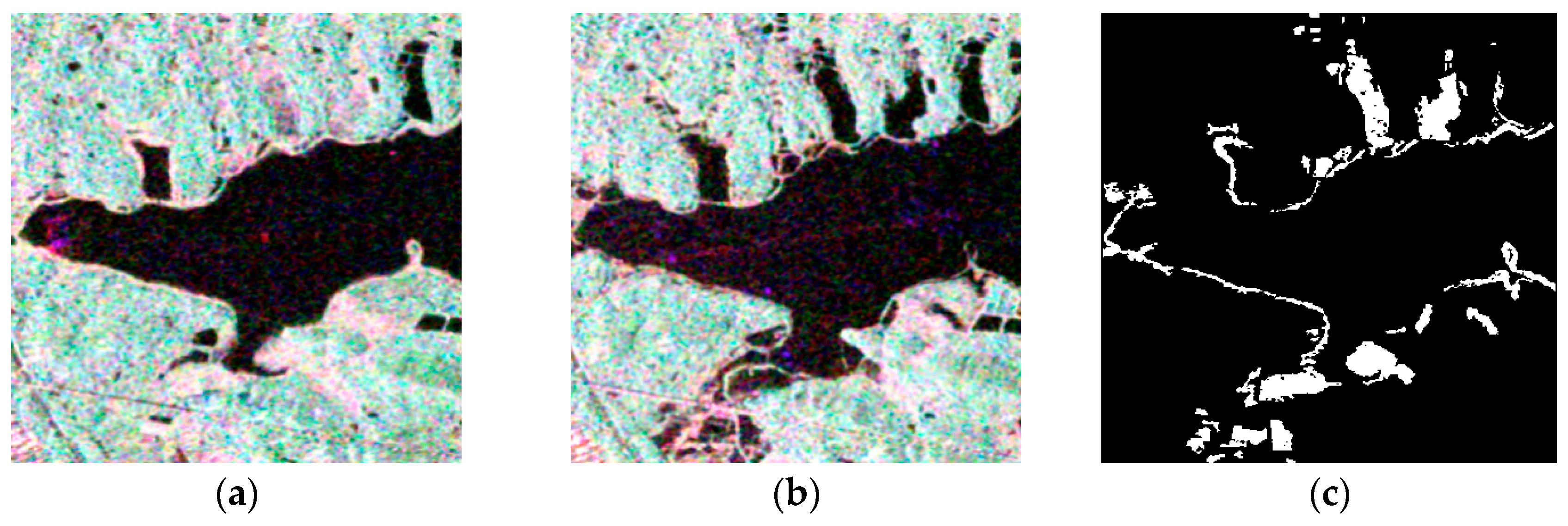
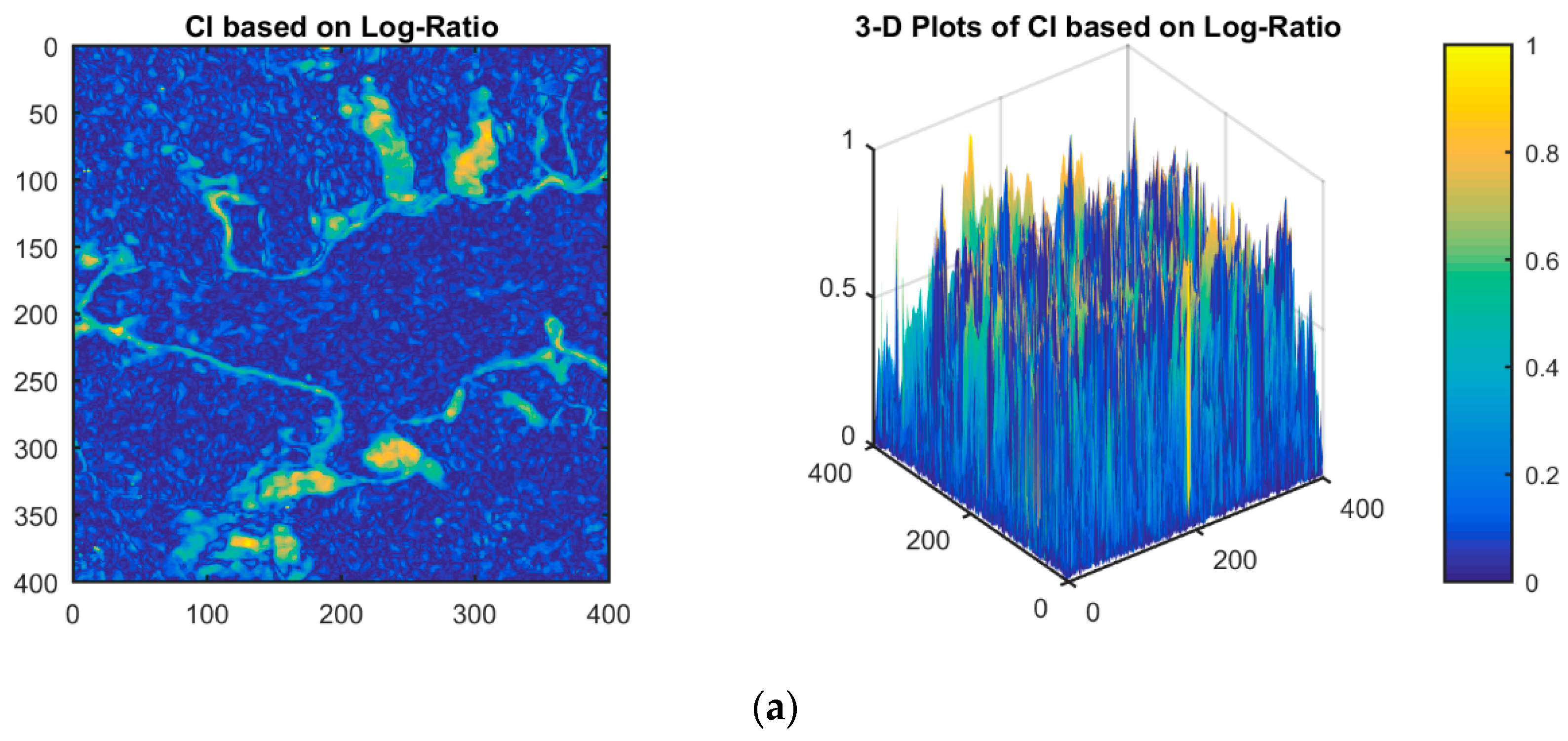
3.3.2. Change Detection Based on the 2015 and 2016 Images
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Bruzzone, L.; Bovolo, F. A novel framework for the design of change-detection systems for very-high-resolution Remote Sensing Images. Proc. IEEE 2013, 101, 609–630. [Google Scholar] [CrossRef]
- Anaya, J.A.; Colditz, R.R.; Valencia, G.M. Land Cover Mapping of a Tropical Region by Integrating Multi-Year Data into an Annual Time Series. Remote Sens. 2015, 7, 16274–16292. [Google Scholar] [CrossRef]
- Zhao, J.Q.; Yang, J.; Li, P.X.; Liu, M.Y.; Shi, Y.M. An Unsupervised Change Detection Based on Test Statistic and KI from Multi-temporal and Full Polarimetric SAR Images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B7, 611–615. [Google Scholar] [CrossRef]
- Conradsen, K.; Nielsen, A.A.; Sehou, J.; Skriver, H. A test statistic in the complex Wishart distribution and its application to change detection in polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 4–19. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, J.; Li, P.; Zhang, L. Seasonal inundation monitoring and vegetation pattern mapping of the Erguna floodplain by means of a RADARSAT-2 fully polarimetric time series. Remote Sens. Environ. 2014, 152, 426–440. [Google Scholar] [CrossRef]
- Celik, T. Unsupervised change detection in satellite images using principal component analysis and k-means clustering. IEEE Geosci. Remote Sens. Lett. 2009, 6, 772–776. [Google Scholar] [CrossRef]
- Lu, Z.; Kwoun, O.-I. Radarsat-1 and ERS InSAR analysis over southeastern coastal Louisiana: Implications for mapping water-level changes beneath swamp forests. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2167–2184. [Google Scholar] [CrossRef]
- Akbari, V.; Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T.; Moser, G.; Serpico, S.B. Polarimetric SAR Change Detection With the Complex Hotelling—Lawley Trace Statistic. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3953–3966. [Google Scholar] [CrossRef]
- Caves, R.; Quegan, S. Segmentation based change detection in ERS-1 SAR images. In Proceedings of the 1994 International Geosci. and Remote Sensing Symposium, IGARSS’94 Surface and Atmospheric Remote Sensing: Technologies, Data Analysis and Interpretation, New York, NY, USA, 9 December 1994; pp. 2149–2151. [Google Scholar]
- Hachicha, S.; Chaabane, F. On the SAR change detection review and optimal decision. Int. J. Remote Sens. 2014, 35, 1693–1714. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. The time variable in data fusion: A change detection perspective. IEEE Geosci. Remote Sens. Mag. 2015, 3, 8–26. [Google Scholar] [CrossRef]
- Rignot, E.J.; van Zyl, J.J. Change detection techniques for ERS-1 SAR data. IEEE Trans. Geosci. Remote Sens. 1993, 31, 896–906. [Google Scholar] [CrossRef]
- Bazi, Y.; Bruzzone, L.; Melgani, F. An unsupervised approach based on the generalized Gaussian model to automatic change detection in multitemporal SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 874–887. [Google Scholar] [CrossRef]
- Moser, G.; Serpico, S.B. Generalized minimum-error thresholding for unsupervised change detection from SAR amplitude imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2972–2982. [Google Scholar] [CrossRef]
- Sumaiya, M.; Kumari, R.S.S. Logarithmic Mean-Based Thresholding for SAR Image Change Detection. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1726–1728. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, H.; Wang, C.; Wu, F. Change detection of multilook polarimetric SAR images using heterogeneous clutter models. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7483–7494. [Google Scholar]
- Zhao, J.; Yang, J.; Lu, Z.; Li, P.; Liu, W.; Yang, L. A Novel Method of Change Detection in Bi-Temporal PolSAR Data Using a Joint—Classification Classifier Based on a Similarity Measure. Remote Sens. 2017, 9, 846. [Google Scholar] [CrossRef]
- Liu, W.; Yang, J.; Zhao, J.; Yang, L. A Novel Method of Unsupervised Change Detection Using Multi-Temporal PolSAR Images. Remote Sens. 2017, 9, 1135. [Google Scholar] [CrossRef]
- Brown, L.G. A survey of image registration techniques. ACM Comput. Surv. (CSUR) 1992, 24, 325–376. [Google Scholar] [CrossRef]
- Inglada, J.; Giros, A. On the possibility of automatic multisensor image registration. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2104–2120. [Google Scholar] [CrossRef]
- Lee, J.-S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Alberga, V. Similarity measures of remotely sensed multi-sensor images for change detection applications. Remote Sens. 2009, 1, 122–143. [Google Scholar] [CrossRef]
- Alonso-González, A.; López-Martínez, C.; Salembier, P. PolSAR time series processing with binary partition trees. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3553–3567. [Google Scholar] [CrossRef]
- Lang, F.; Yang, J.; Li, D.; Zhao, L.; Shi, L. Polarimetric SAR image segmentation using statistical region merging. IEEE Geosci. Remote Sens. Lett. 2014, 11, 509–513. [Google Scholar] [CrossRef]
- Yang, W.; Yang, X.; Yan, T.; Song, H.; Xia, G.-S. Region-Based Change Detection for Polarimetric SAR Images Using Wishart Mixture Models. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6746–6756. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondizio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2004, 25, 2365–2401. [Google Scholar] [CrossRef]
- Qiu, B.; Prinet, V.; Perrier, E.; Monga, O. Multi-block PCA method for image change detection. In Proceedings of the 2003 12th International Conference on Image Analysis and Processing, Mantova, Italy, 17–19 September 2003; pp. 385–390. [Google Scholar]
- Yousif, O.; Ban, Y. Improving urban change detection from multitemporal SAR images using PCA-NLM. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2032–2041. [Google Scholar] [CrossRef]
- Carincotte, C.; Derrode, S.; Bourennane, S. Unsupervised change detection on SAR images using fuzzy hidden Markov chains. IEEE Trans. Geosci. Remote Sens. 2006, 44, 432–441. [Google Scholar] [CrossRef]
- Bouyahia, Z.; Benyoussef, L.; Derrode, S. Change detection in synthetic aperture radar images with a sliding hidden Markov chain model. J. Appl. Remote Sens. 2008, 2, 023526. [Google Scholar]
- Inglada, J.; Mercier, G. A new statistical similarity measure for change detection in multitemporal SAR images and its extension to multiscale change analysis. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1432–1445. [Google Scholar] [CrossRef]
- Gao, G.; Liu, L.; Zhao, L.; Shi, G.; Kuang, G. An adaptive and fast CFAR algorithm based on automatic censoring for target detection in high-resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1685–1697. [Google Scholar] [CrossRef]
- Jung, C.H.; Song, W.Y.; Rho, S.H.; Kim, J.; Park, J.T.; Kwag, Y.K. Double-step fast CFAR scheme for multiple target detection in high resolution SAR images. In Proceedings of the 2010 IEEE Radar Conference, Washington, DC, USA, 10–14 May 2010; pp. 1172–1175. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. Automatica 1975, 11, 23–27. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Image Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit. 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Sharifi, K.; Leon-Garcia, A. Estimation of shape parameter for generalized Gaussian distributions in subband decompositions of video. IEEE Trans. Circuits Syst. Video Technol. 1995, 5, 52–56. [Google Scholar] [CrossRef]
- Lee, J.S.; Jurkevich, L.; Dewaele, P.; Wambacq, P.; Oosterlinck, A. Speckle filtering of synthetic aperture radar images: A review. Remote Sens. Rev. 1994, 8, 313–340. [Google Scholar] [CrossRef]
- Pham, M.T.; Mercier, G.; Michel, J. Change detection between SAR images using a pointwise approach and graph theory. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2020–2032. [Google Scholar] [CrossRef]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | FA (%) | TE (%) | OA (%) | KAPPA |
|---|---|---|---|---|
| HH and improved K&I | 10.49 | 11.17 | 88.83 | 0.4574 |
| HV and improved K&I | 7.78 | 8.67 | 91.33 | 0.5292 |
| VV and improved K&I | 8.45 | 9.31 | 90.69 | 0.5078 |
| CVA and improved K&I | 0.67 | 7.41 | 92.59 | 0.0994 |
| Test statistic with 5% significance level | 8.77 | 9.32 | 90.68 | 0.5204 |
| Test statistic with 1% significance level | 6.9 | 7.82 | 92.18 | 0.5597 |
| Test statistic and K&I | 6.16 | 7.24 | 92.76 | 0.5757 |
| Test statistic and CFAR | 5.99 | 7.32 | 92.68 | 0.5626 |
| Test statistic and improved K&I (the proposed method) | 5.79 | 6.98 | 93.02 | 0.5827 |
| Method | FA (%) | TE (%) | OA (%) | KAPPA |
|---|---|---|---|---|
| HH and improved K&I | 6.55 | 7.03 | 92.96 | 0.4413 |
| HV and improved K&I | 5.06 | 5.80 | 94.20 | 0.4774 |
| VV and improved K&I | 5.19 | 5.67 | 94.33 | 0.5041 |
| CVA and improved K&I | 1.03 | 4.73 | 95.27 | 0.0415 |
| Test statistic with 5% significance level | 6.17 | 6.42 | 93.58 | 0.4857 |
| Test statistic with 1% significance level | 4.59 | 5.04 | 94.96 | 0.5398 |
| Test statistic and K&I | 3.96 | 4.51 | 95.49 | 0.5629 |
| Test statistic and CFAR | 6.53 | 6.84 | 93.16 | 0.4630 |
| Test statistic and improved K&I (the proposed method) | 2.69 | 3.51 | 96.49 | 0.6098 |
| Method | FA (%) | TE (%) | OA (%) | KAPPA |
|---|---|---|---|---|
| HH and improved K&I | 6.69 | 7.97 | 92.03 | 0.5135 |
| HV and improved K&I | 6.51 | 7.99 | 92.01 | 0.5026 |
| VV and improved K&I | 6.37 | 7.50 | 92.50 | 0.5388 |
| CVA and improved K&I | 1.08 | 7.36 | 92.64 | 0.0599 |
| Test statistic with 5% significance level | 7.22 | 7.99 | 92.01 | 0.5358 |
| Test statistic with 1% significance level | 5.37 | 6.57 | 93.43 | 0.5749 |
| Test statistic and K&I | 4.86 | 6.19 | 93.81 | 0.5862 |
| Test statistic and CFAR | 6.70 | 7.92 | 92.08 | 0.5179 |
| Test statistic and improved K&I (the proposed method) | 3.18 | 5.09 | 94.91 | 0.6141 |
| Method | FA (%) | TE (%) | OA (%) | KAPPA |
|---|---|---|---|---|
| HH and improved K&I | 7.15 | 7.62 | 92.38 | 0.6402 |
| HV and improved K&I | 4.78 | 6.23 | 93.77 | 0.6686 |
| VV and improved K&I | 6.53 | 7.15 | 92.85 | 0.6541 |
| CVA and improved K&I | 0.09 | 9.35 | 90.65 | 0.0017 |
| Test statistic with 5% significance level | 6.80 | 7.17 | 92.83 | 0.6593 |
| Test statistic with 1% significance level | 5.30 | 6.09 | 93.91 | 0.6906 |
| Test statistic and K&I | 5.64 | 5.92 | 94.08 | 0.6755 |
| Test statistic and CFAR | 7.67 | 8.28 | 91.72 | 0.6130 |
| Test statistic and improved K&I (the proposed method) | 3.26 | 4.81 | 95.19 | 0.7282 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Yang, J.; Lu, Z.; Li, P.; Liu, W.; Yang, L. An Unsupervised Method of Change Detection in Multi-Temporal PolSAR Data Using a Test Statistic and an Improved K&I Algorithm. Appl. Sci. 2017, 7, 1297. https://doi.org/10.3390/app7121297
Zhao J, Yang J, Lu Z, Li P, Liu W, Yang L. An Unsupervised Method of Change Detection in Multi-Temporal PolSAR Data Using a Test Statistic and an Improved K&I Algorithm. Applied Sciences. 2017; 7(12):1297. https://doi.org/10.3390/app7121297
Chicago/Turabian StyleZhao, Jinqi, Jie Yang, Zhong Lu, Pingxiang Li, Wensong Liu, and Le Yang. 2017. "An Unsupervised Method of Change Detection in Multi-Temporal PolSAR Data Using a Test Statistic and an Improved K&I Algorithm" Applied Sciences 7, no. 12: 1297. https://doi.org/10.3390/app7121297
APA StyleZhao, J., Yang, J., Lu, Z., Li, P., Liu, W., & Yang, L. (2017). An Unsupervised Method of Change Detection in Multi-Temporal PolSAR Data Using a Test Statistic and an Improved K&I Algorithm. Applied Sciences, 7(12), 1297. https://doi.org/10.3390/app7121297