
A Real-Time Computation Model of the Electromagnetic Force and Torque for a Maglev Planar Motor with the Concentric Winding



Abstract
:1. Introduction
2. Maglev Planar Motor and Coordinate System
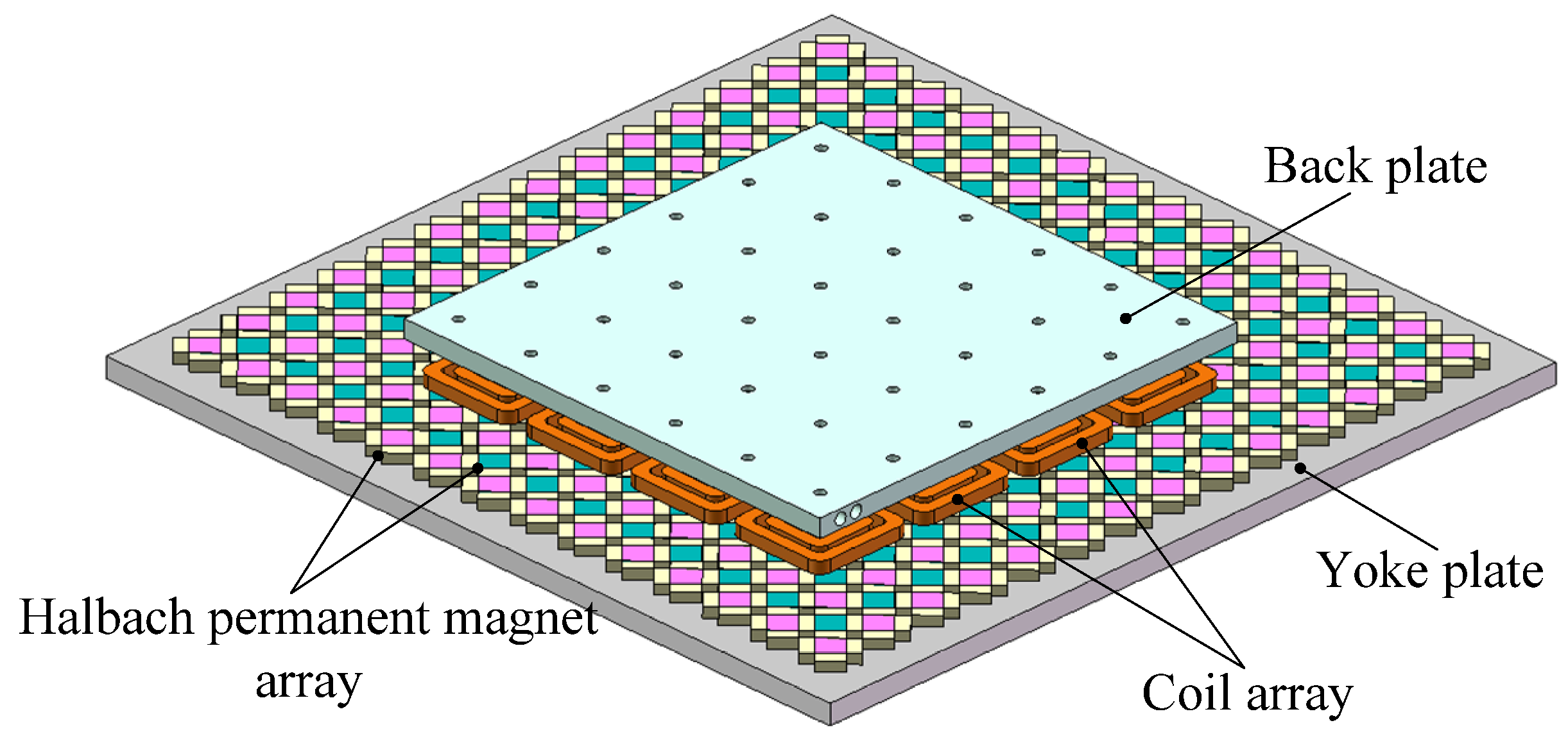
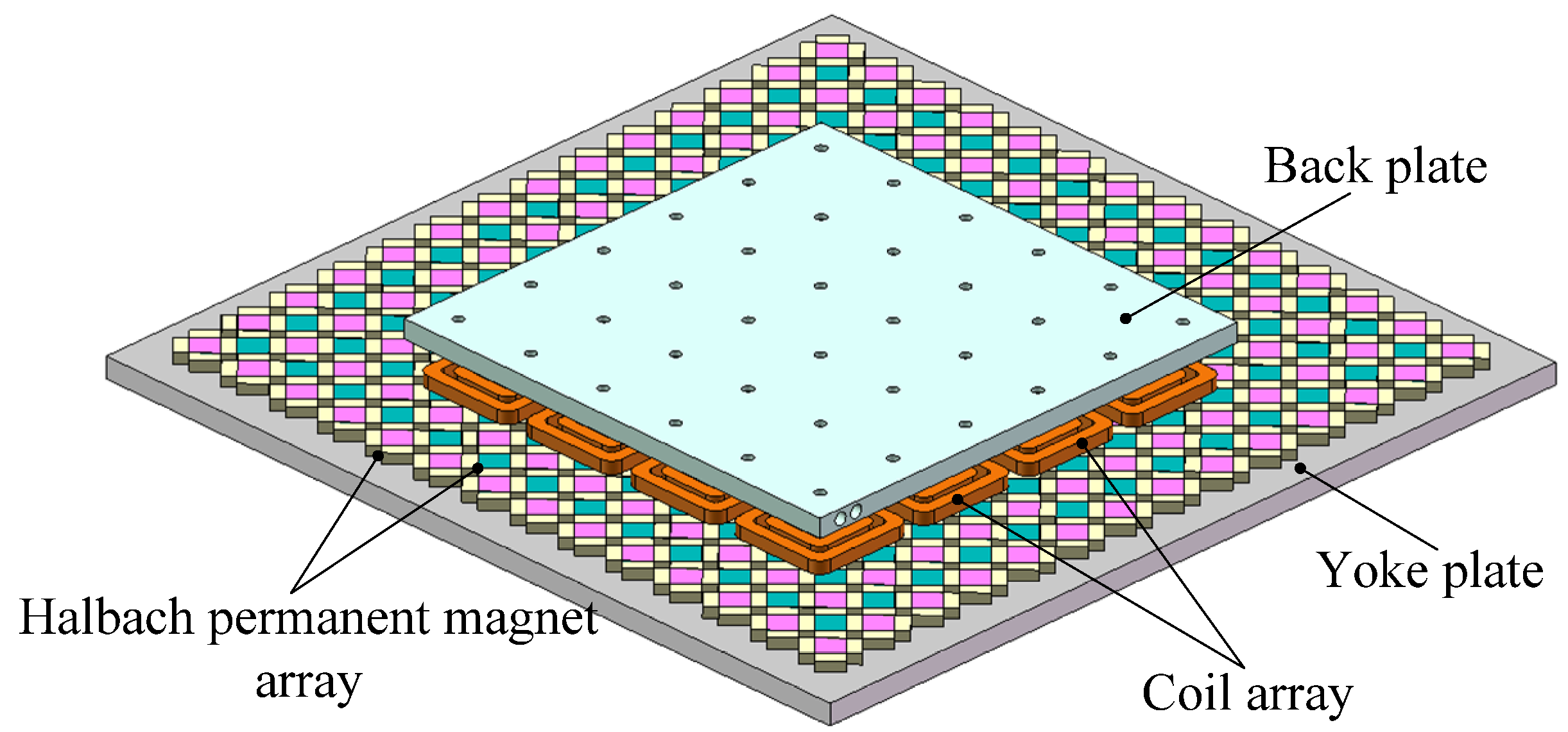
2.1. Basic Structure and Working Principle
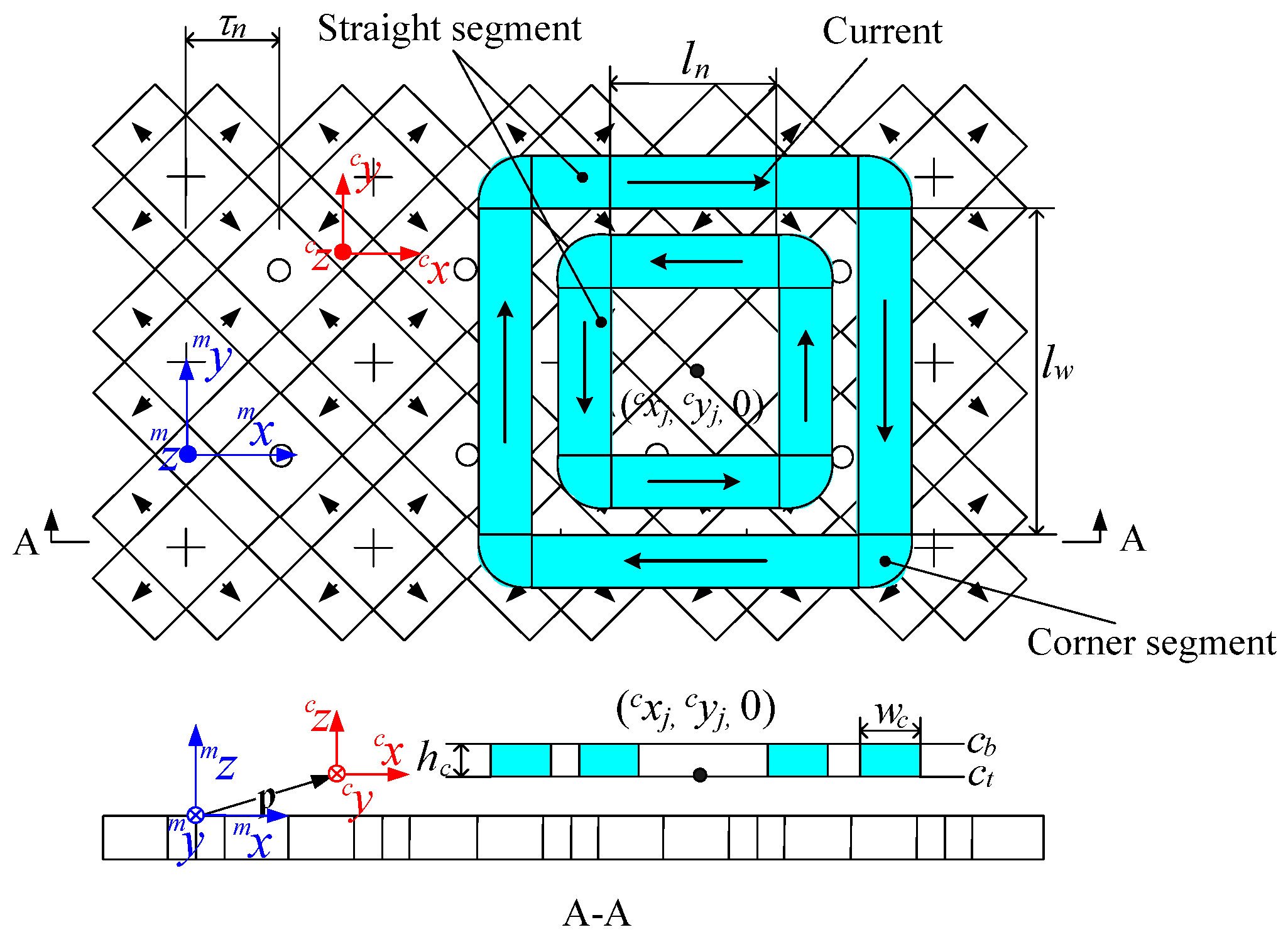
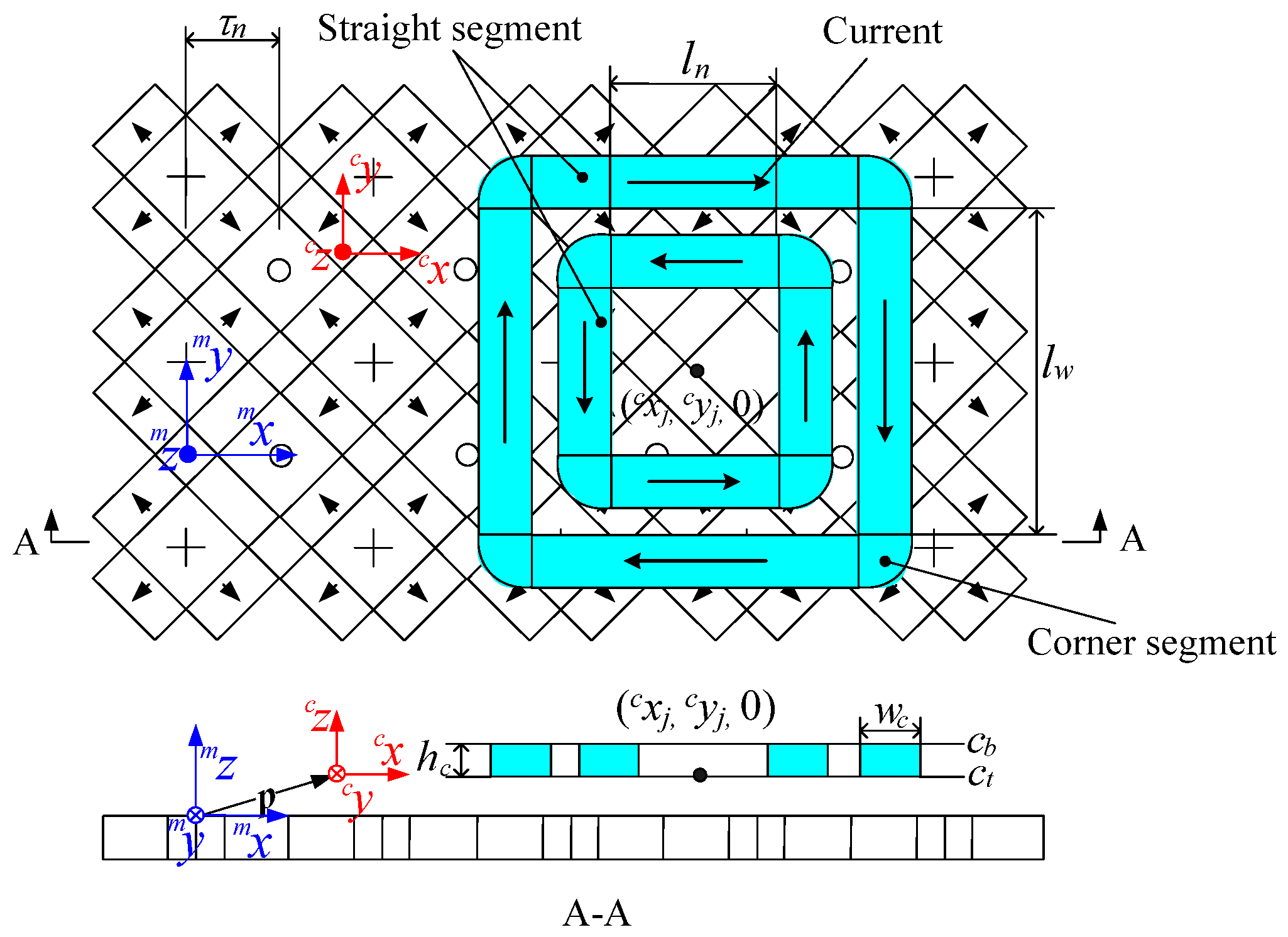
2.2. Winding Model and Parameter Definition
2.3. Coordinate Definitions and Transformation
3. Electromagnetic Force and Torque
3.1. Permanent Magnet Array Model
- The relative permeability of the iron yoke has a value of infinity;
- The magnet array has a periodicity over the mx and my direction and the magnetization value of the permanent magnet is not changed;
- Ending effect is neglected.
3.2. Force and Torque on Straight Segment
- The magnetic flux density distribution of the Halbach permanent magnet array is modeled by a 2-D sine wave;
- The coils are replaced by filament ones;
- The coil and magnet arrays are rigid.
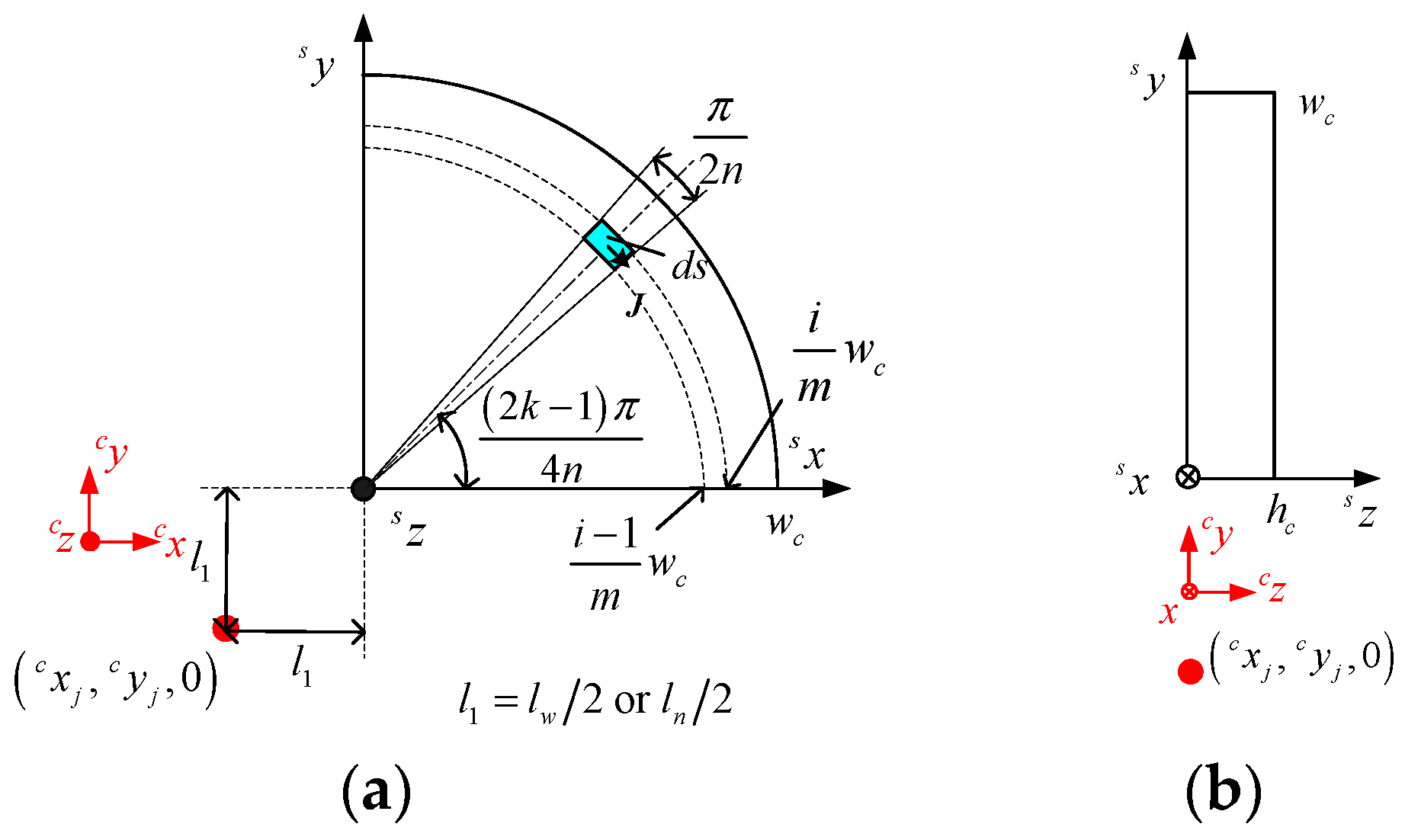
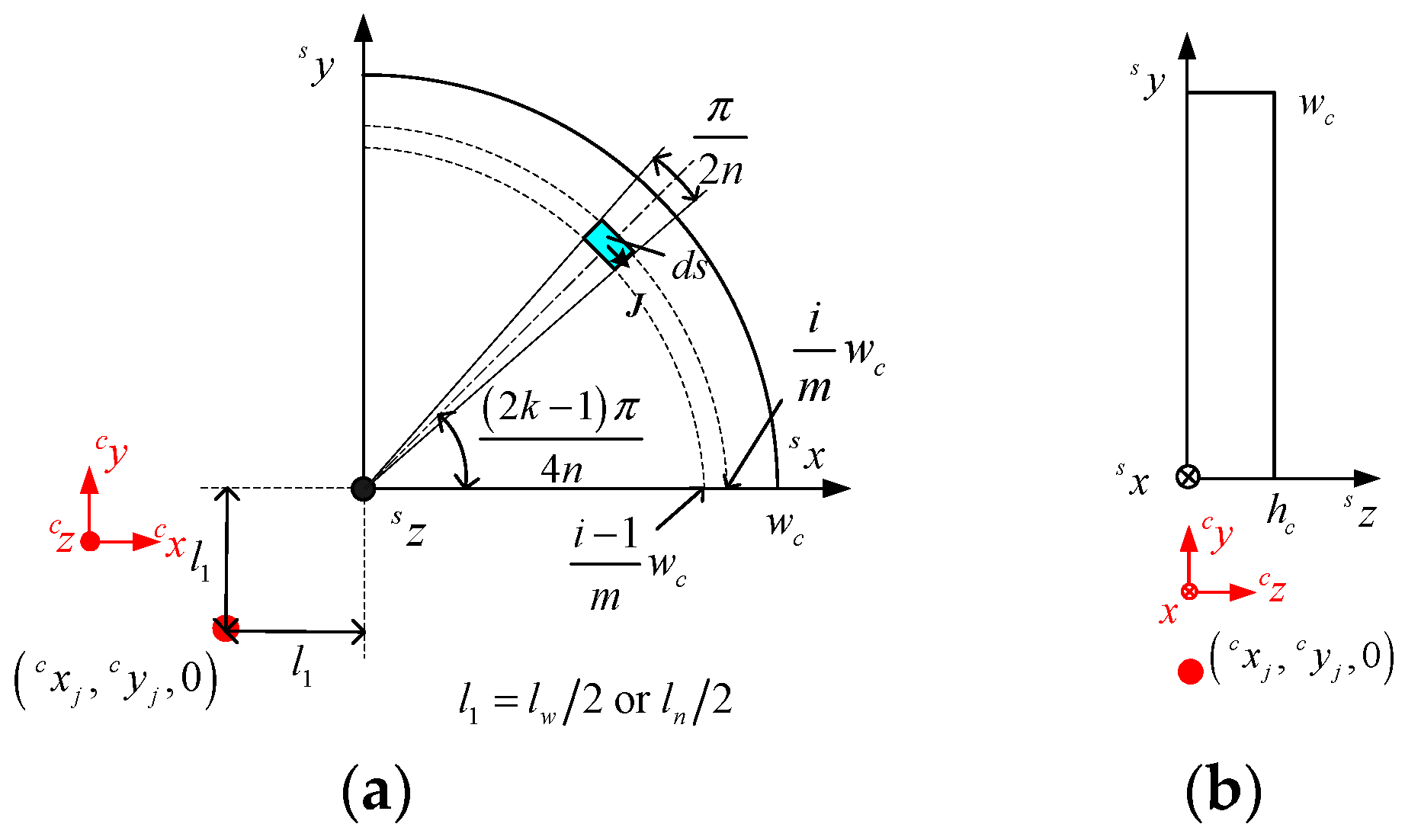
3.3. Force and Torque on Corner Segment
3.4. Accurate Real-Time Equation of Electromagnetic Force and Torque
4. Validation and Analysis
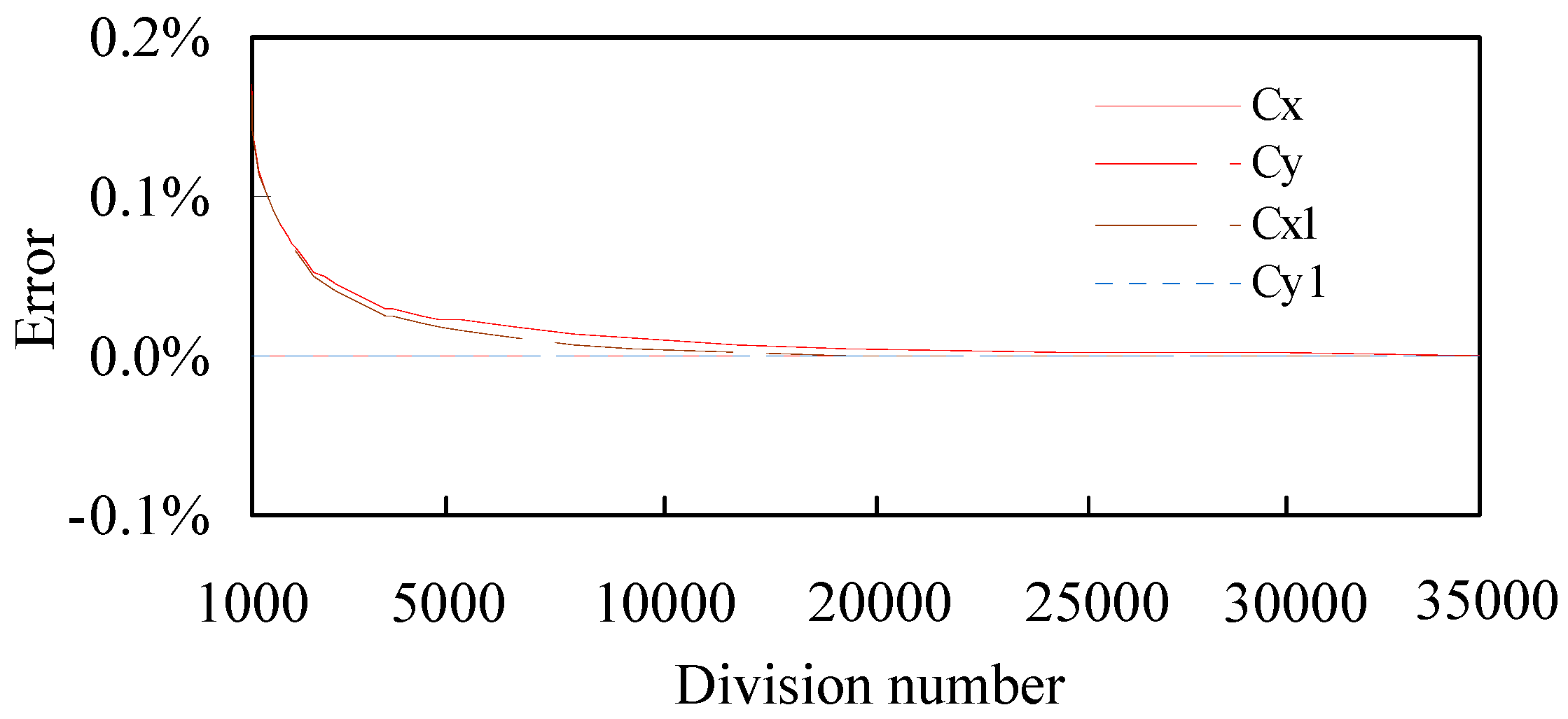
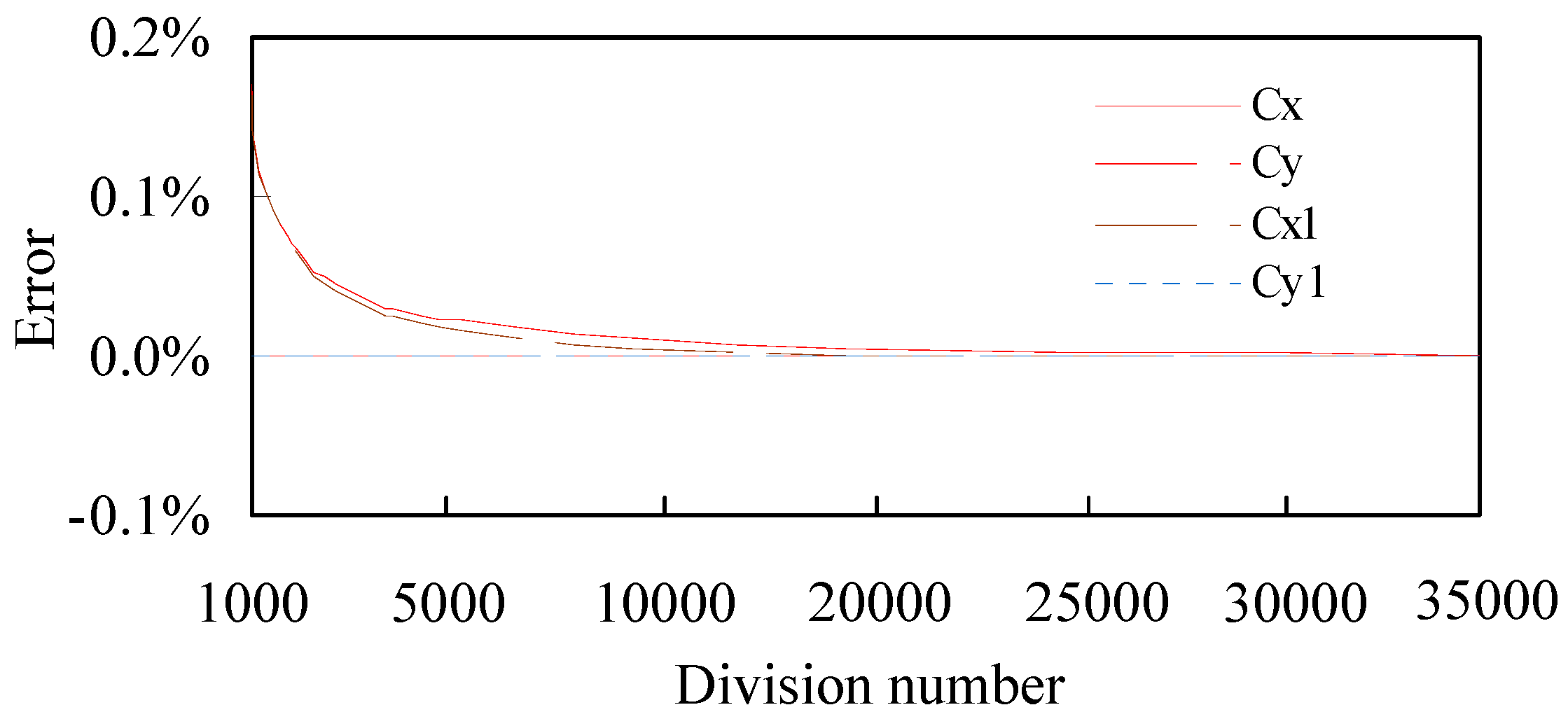
4.1. Precision Analysis of Coefficient
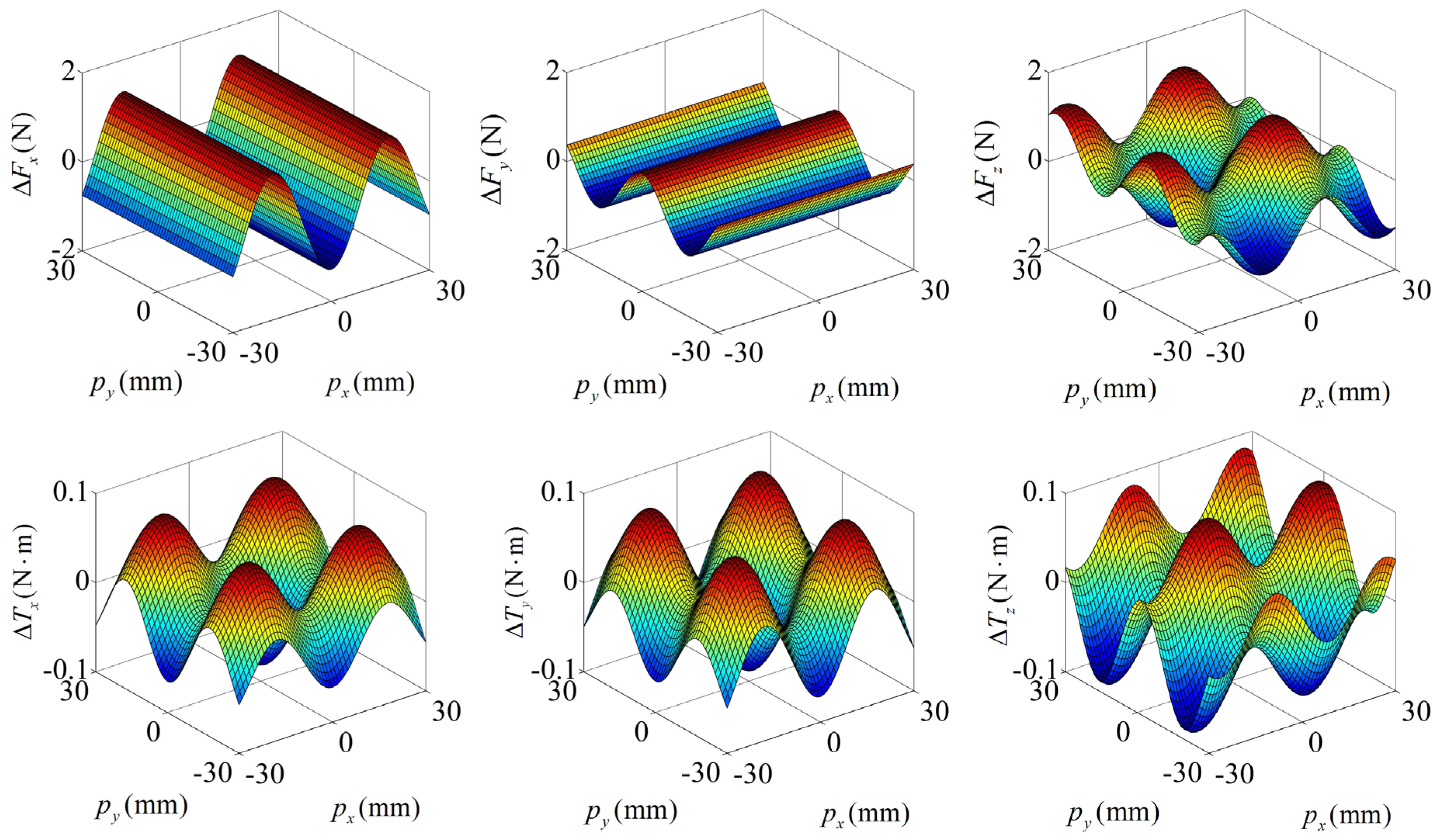
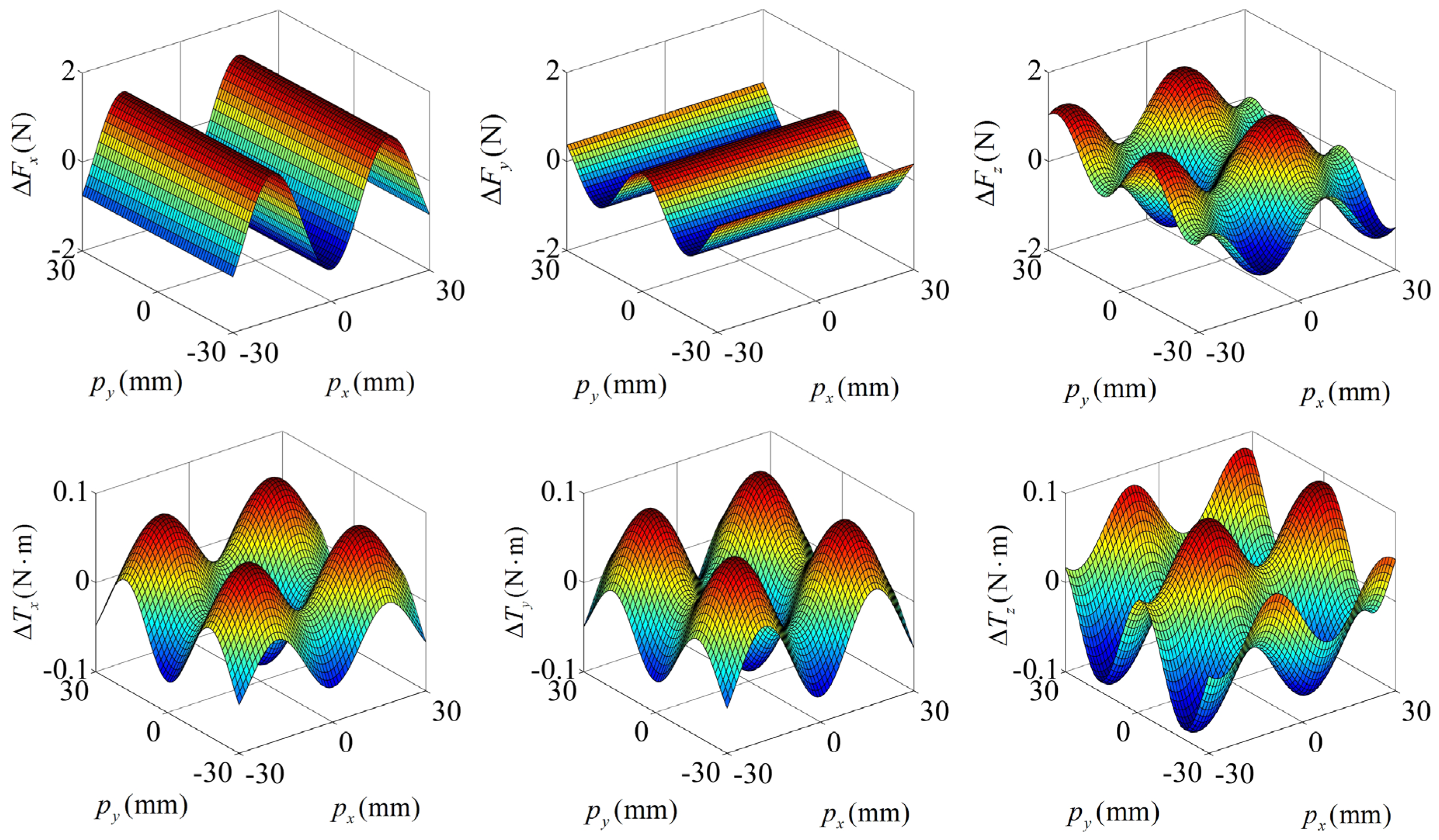
4.2. Precision Validation of Model
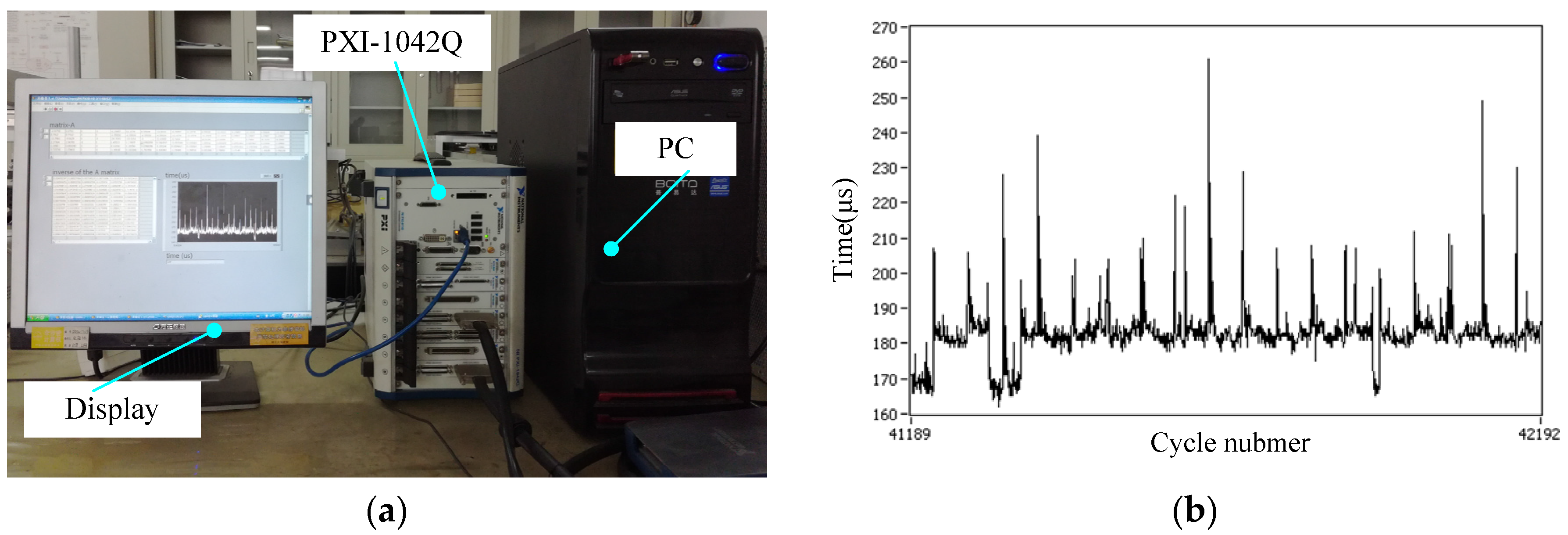
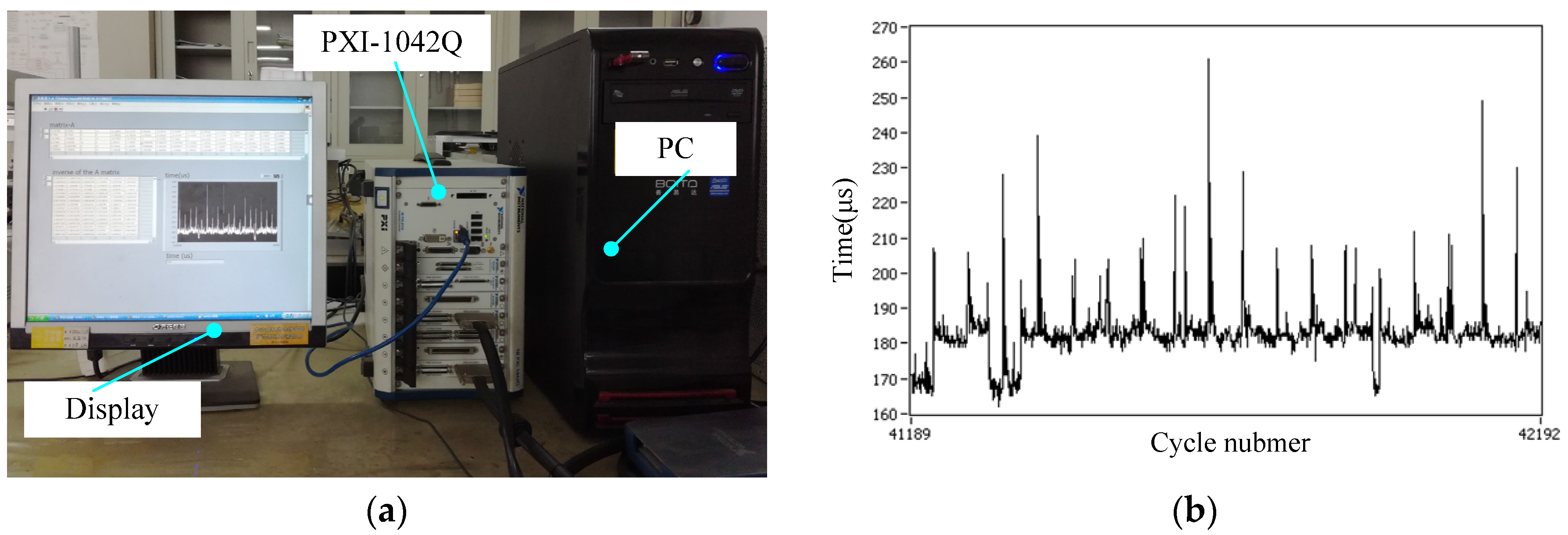
4.3. Real-Time Ability Validation of Model
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rovers, J.M.M.; Jansen, J.W.; Compter, J.C.; Lomonova, E.A. Analysis Method of the Dynamic Force and Torque Distribution in the Magnet Array of a Commutated Magnetically Levitated Planar Actuator. IEEE Trans. Magn. 2012, 59, 2157–2166. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Kim, J.W. Design and control of a compact lightweight planar position moving over a concentrated-Field Magnet Matrix. IEEE Trans. Mech. 2013, 18, 1090–1099. [Google Scholar] [CrossRef]
- Jansen, J.W.; Lomonova, E.A.; Vandenput, A.J.A.; Van Lierop, C.M.M. Analytical Model of a Magnetically Levitated Linear Actuator. In Proceedings of the IEEE Industry Applications Conference fourtieth IAS Annual Meeting, Hong Kong, China, 2–6 October 2005; pp. 2107–2113.
- Jansen, J.W.; Van Lierop, C.M.M.; Lomonova, E.A. Magnetically levitated planar actuator with moving magnets. IEEE Trans. Ind. Appl. 2008, 44, 1108–1115. [Google Scholar] [CrossRef]
- Ueda, Y.; Ohsaki, H. A planar actuator with a small mover traveling over large Yaw and translational displacements. IEEE Trans. Magn. 2008, 44, 609–616. [Google Scholar] [CrossRef]
- Christian, S.-R.J.; Kim, W.J. Multivariable control and optimization of a compact 6-DOF precision positioner with hybrid H-2/H-infinity and digital filtering. IEEE Trans. Control Syst. Technol. 2013, 21, 1641–1651. [Google Scholar]
- Cao, J.Y.; Zhu, Y.; Wang, J.S.; Yin, W.S.; Duan, G.H. A Novel Synchronous Permanent Magnet Planar Motor and Its Model for Control Applications. IEEE Trans. Magn. 2005, 41, 2156–2163. [Google Scholar]
- Choi, J.H.; Park, J.H.; Baek, Y.S. Design and Experimental Validation of Performance for a Maglev Moving-Magnet-Type Synchronous PM Planar Moto. IEEE Trans. Magn. 2006, 42, 3419–3421. [Google Scholar] [CrossRef]
- De Boeij, J.; Lomonova, J.E.; Vandenput, A. Modeling ironless permanent-magnet planar actuator structures. IEEE Trans. Magn. 2006, 42, 2009–2016. [Google Scholar] [CrossRef]
- Daiki, E.; Masaya, W. Study of a basic structure of surface actuator. IEEE Trans. Magn. 1989, 25, 3916–3918. [Google Scholar]
- Kook, R.S.; Park, J.K. A Compact Ultra-precision Air Bearing Stage with 3-DOF Planar Motions Using Electromagnetic Motors. Int. J. Precis. Eng. Manuf. 2011, 12, 115–119. [Google Scholar]
- Compter, J.C. Electro-dynamic planar motor. J. Precis. Eng. 2004, 28, 171–180. [Google Scholar] [CrossRef]
- Rovers, J.M.M.; Jansen, J.W.; Lomonova, E.A. Multiphysical analysis of moving-magnet planar motor topologies. IEEE Trans. Magn. 2013, 49, 5730–5741. [Google Scholar] [CrossRef]
- Vandenput, A.J.A.; Lomonova, E.A.; Makarovic, J.; Hol, S.A.J.; Lebedev, A.; Jansen, J.W. Novel types of the multi-degrees-of-freedom electro-magnetic actuators. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion, Taormina, Italy, 23–26 May 2006; pp. 1056–1062.
- Compter, J.C.; Jansen, J.W.; Lomonova, E.A.; Vandenput, A.J.A. Six degrees of freedom planar motors. In Proceedings of the 4th Euspen International Conference, Glasgow, UK, 31 May—2 June 2004; pp. 390–391.
- Van Lierop, C.M.M.; Jansen, J.W.; Lomonova, E.A.; Damen, A.A.H.; Van den Bosch, P.P.J.; Vandenput, A.J.A. Commutation of a magnetically levitated planar actuator with moving-magnets. IEEE Trans. Ind. Appl. 2008, 128, 1333–1338. [Google Scholar] [CrossRef]
- Min, W.; Zhang, M.; Zhu, Y.; Chen, B.D.; Duan, G.H.; Hu, J.C.; Yin, W.S. Analysis and optimization of a new 2-D magnet array for planar motor. IEEE Trans. Magn. 2010, 46, 1167–1171. [Google Scholar] [CrossRef]
- Zhang, L.; Kou, B.Q.; Zhang, H.; Guo, S.L. Characteristic Analysis of a Long-Stroke Synchronous Permanent Magnet Planar Motor. IEEE Trans. Magn. 2012, 48, 4658–4661. [Google Scholar] [CrossRef]
- Jansen, J.W.; Smeets, J.P.C.; Overboom, T.T.; Rovers, J.M.M.; Lomonova, E.A. Overview of Analytical Models for the Design of Linear and Planar Motors. IEEE Trans. Magn. 2014, 50, 39–52. [Google Scholar] [CrossRef]
- Rovers, J.M.M.; Jansen, J.W.; Lomonova, E.A. Force and Torque Errors Due to Manufacturing Tolerances in Planar Actuators. IEEE Trans. Magn. 2012, 48, 3116–3119. [Google Scholar] [CrossRef]
- Zhang, L.; Kou, B.Q.; Li, L.Y. Modeling and Design of an Integrated Winding Synchronous Permanent Magnet Planar Motor. IEEE Trans. Plasma Sci. 2013, 41, 1214–1219. [Google Scholar] [CrossRef]
- Rovers, J.M.M.; Jansen, J.W.; Lomonova, E.A. Analytical calculation of the force between a rectangular coil and a cuboidal permanent magnet. IEEE Trans. Magn. 2010, 46, 1656–1659. [Google Scholar] [CrossRef]
- Hamers, H.R. Actuation Principles of Permanent Magnet Synchronous Planar Motors: A Literature Survey; Working Paper; Eindhoven University of Technology: Eindhoven, The Netherlands, 2005. [Google Scholar]
- Van Lierop, C.M.M.; Jansen, J.W.; Damen, A.A.H.; Lomonova, E.A.; Van den Bosch, P.P.J.; Vandenput, A.J.A. Model-Based Commutation of a Long-Stroke Magnetically Levitated Linear Actuator. IEEE Trans. Ind. Appl. 2009, 45, 1982–1990. [Google Scholar] [CrossRef]
- Achtenberg, J.; Rovers, J.M.M.; Van Lierop, C.M.M.; Jansen, J.W.; Van den Bosch, P.P.J.; Lomonova, E.A. Model based commutation containing edge coils for a moving magnet planar actuator. IEEE Trans. Ind. Appl. 2010, 130, 1147–1152. [Google Scholar] [CrossRef]
- Kou, B.Q.; Zhang, H.; Li, L.Y. Analysis and Design of a Novel 3-DOF Lorentz-Force-Driven DC Planar Motor. IEEE Trans. Magn. 2011, 47, 2118–2126. [Google Scholar]
- Jansen, J.W.; Van Lierop, C.M.M.; Lomonova, E.A.; Vandenput, A.J.A. Modeling of magnetically levitated planar actuators with moving magnets. IEEE Trans. Magn. 2007, 43, 15–25. [Google Scholar] [CrossRef]
- Min, W.; Zhang, M.; Zhu, Y.; Liu, F.; Duan, G.; Hu, J.; Yin, W. Analysisand design of novel overlapping ironless windings for planar motors. IEEE Trans. Magn. 2011, 47, 4635–4642. [Google Scholar] [CrossRef]
- Verma, S.; Shakir, H.; Kim, W.J. Novel electromagnetic actuation scheme for multiaxis nanopositioning. IEEE Trans. Magn. 2006, 42, 2052–2062. [Google Scholar] [CrossRef]
- Zhu, H.Y.; Teo, T.J.; Pang, C.K. Design and Modeling of a Six Degrees-of-Freedom Magnetically Levitated Positioner Using Square Coils and 1D Halbach Arrays. IEEE Trans. Ind. Electron. 2016, 64, 440–450. [Google Scholar] [CrossRef]
- Xu, F.Q.; Dinavahi, V.; Xu, X. Parallel Computation of Wrench Model for Commutated Magnetically Levitated Planar Actuator. IEEE Trans. Ind. Electron. 2016, 63, 7621–7631. [Google Scholar] [CrossRef]
- Huang, R.; Feng, J. Magnetic Field Analysis of Permanent Magnet Array for Planar Motor Based on Equivalent Magnetic Charge Method. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; pp. 3966–3970.
- Zhang, L.; Kou, B.Q.; Xing, F.; Luo, J. Modeling and Analysis of a Magnetically Levitated Synchronous Permanent Magnet Planar Motor with Concentric Structure Winding. In Proceedings of the Electromagnetic Launch Technology, La Jolla, CA, USA, 7–11 July 2014; pp. 1–6.
- Peng, J.; Zhou, Y.F.; Liu, G.D. Calculation of a New Real-Time Control Model for the Magnetically Levitated Ironless Planar Motor. IEEE Trans. Magn. 2013, 49, 1416–1422. [Google Scholar] [CrossRef]
- Jansen, J.W. Magnetically Levitated Planar Actuator with Moving Magnets: Electromechanical Analysis and Design. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, November 2007. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Pole pitch τn | 17.7 | mm |
| Winding width wc | 11.8 | mm |
| Permanent magnet thickness hm | 20 | mm |
| Air gap h | 1 | mm |
| Winding thickness hc | 10 | mm |
| Outer coil straight segment length lw | 76.7 | mm |
| Inner coil straight segment length ln | 41.3 | mm |
| Magnetic flux density vertical component Bz | 0.81 | T |
| Number of turns Nc | 218 | - |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kou, B.; Xing, F.; Zhang, L.; Zhang, C.; Zhou, Y. A Real-Time Computation Model of the Electromagnetic Force and Torque for a Maglev Planar Motor with the Concentric Winding. Appl. Sci. 2017, 7, 98. https://doi.org/10.3390/app7010098
Kou B, Xing F, Zhang L, Zhang C, Zhou Y. A Real-Time Computation Model of the Electromagnetic Force and Torque for a Maglev Planar Motor with the Concentric Winding. Applied Sciences. 2017; 7(1):98. https://doi.org/10.3390/app7010098
Chicago/Turabian StyleKou, Baoquan, Feng Xing, Lu Zhang, Chaoning Zhang, and Yiheng Zhou. 2017. "A Real-Time Computation Model of the Electromagnetic Force and Torque for a Maglev Planar Motor with the Concentric Winding" Applied Sciences 7, no. 1: 98. https://doi.org/10.3390/app7010098
APA StyleKou, B., Xing, F., Zhang, L., Zhang, C., & Zhou, Y. (2017). A Real-Time Computation Model of the Electromagnetic Force and Torque for a Maglev Planar Motor with the Concentric Winding. Applied Sciences, 7(1), 98. https://doi.org/10.3390/app7010098