

Optimization Control of Sub-Synchronous Oscillations in Doubly Fed Generators with Wind Turbines Using the Genetic Algorithm

Abstract
1. Introduction
- For the first time, the cooperative damping method for the grid-side and rotor-side control systems of the DFIG is proposed to solve the SSO problem of doubly fed wind power via a series-capacitor grid-connected system.
- The parameters, including the gain and phase shift of the proposed SSO damping method, are optimized using the genetic algorithm to achieve the best performance for all variable operation conditions.
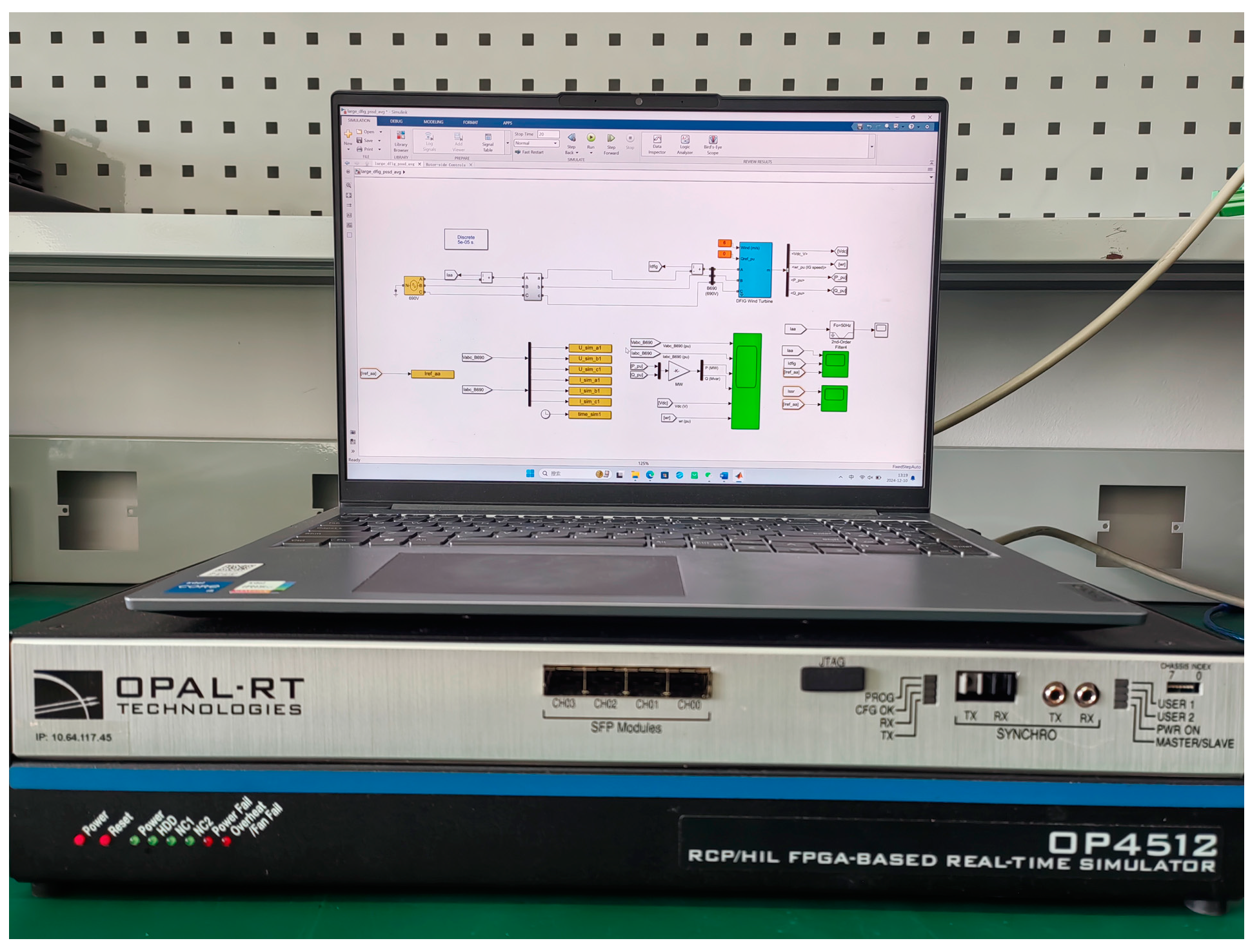
- The proposed optimized SSO damping method is verified with the established model under the RTLAB platform.
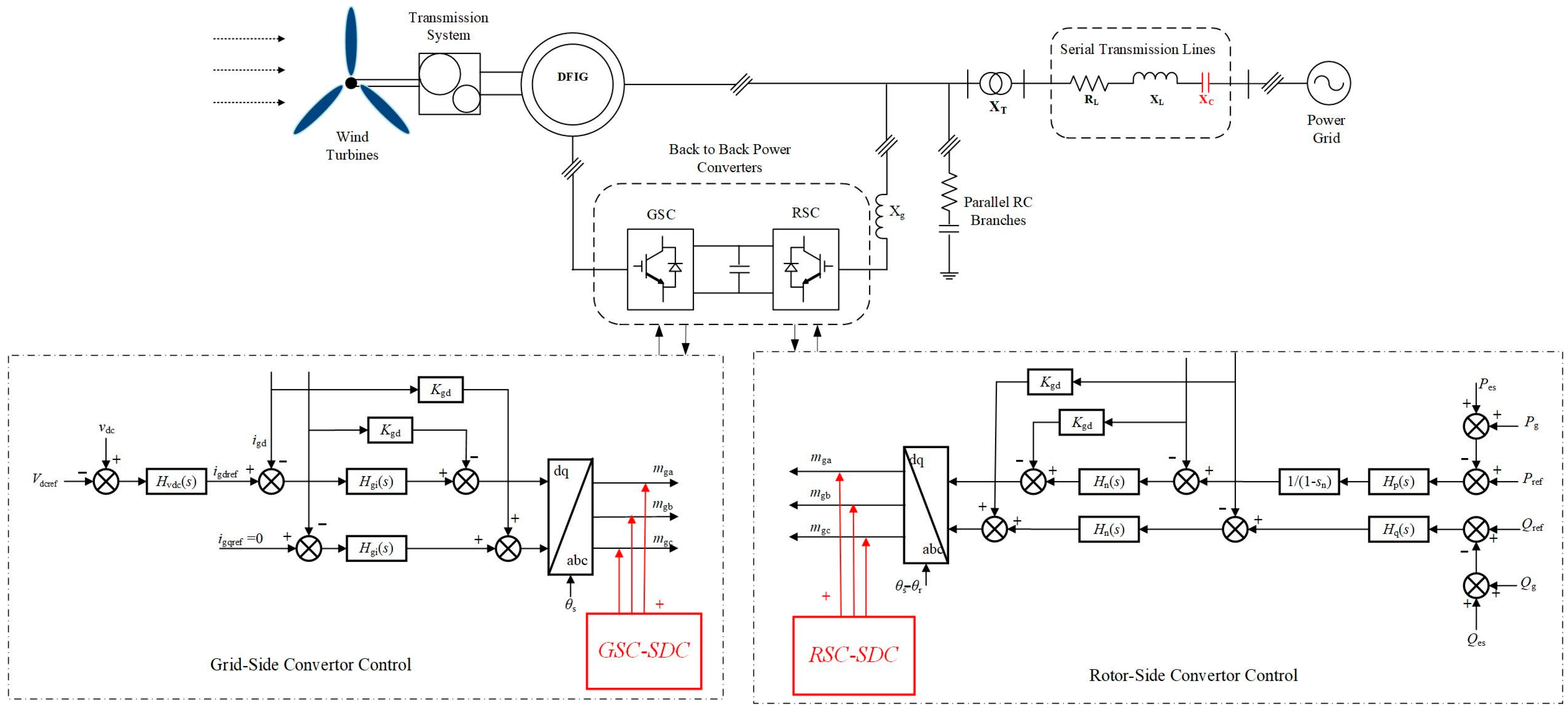
2. Modeling of the Grid-Connected Systems of Doubly Fed Wind Turbines Through Series Compensation
2.1. Mathematical Model of Doubly Fed Asynchronous Wind Turbines
2.2. Grid-Side Converter Control Model
2.3. Rotor-Side Converter Control Model
2.4. Frequency Domain Impedance Model
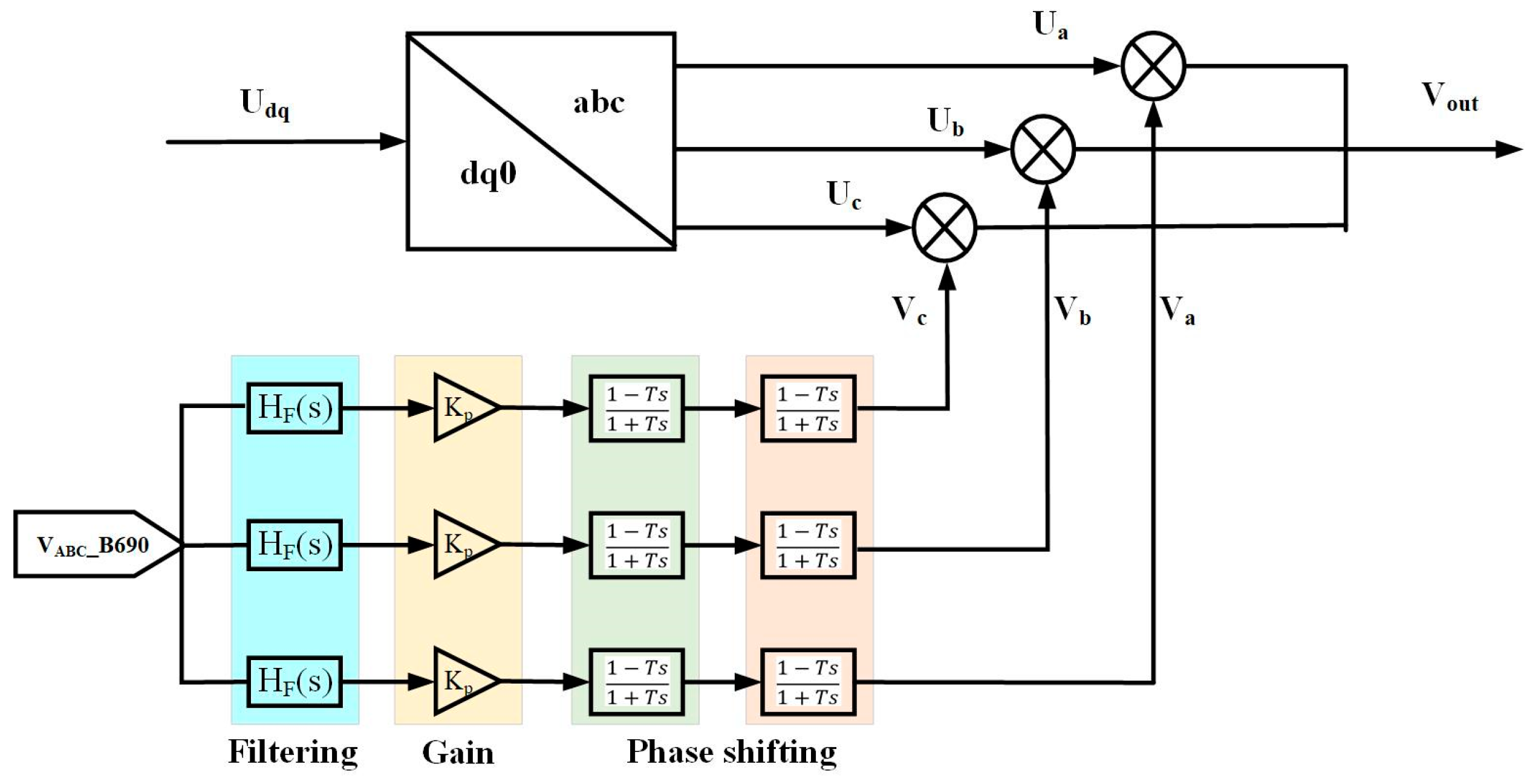
3. Additional Damping Controller Design
3.1. Filter
3.2. Gain
3.3. Phase Shifting
3.4. Add the Impedance Transfer Function of SDC
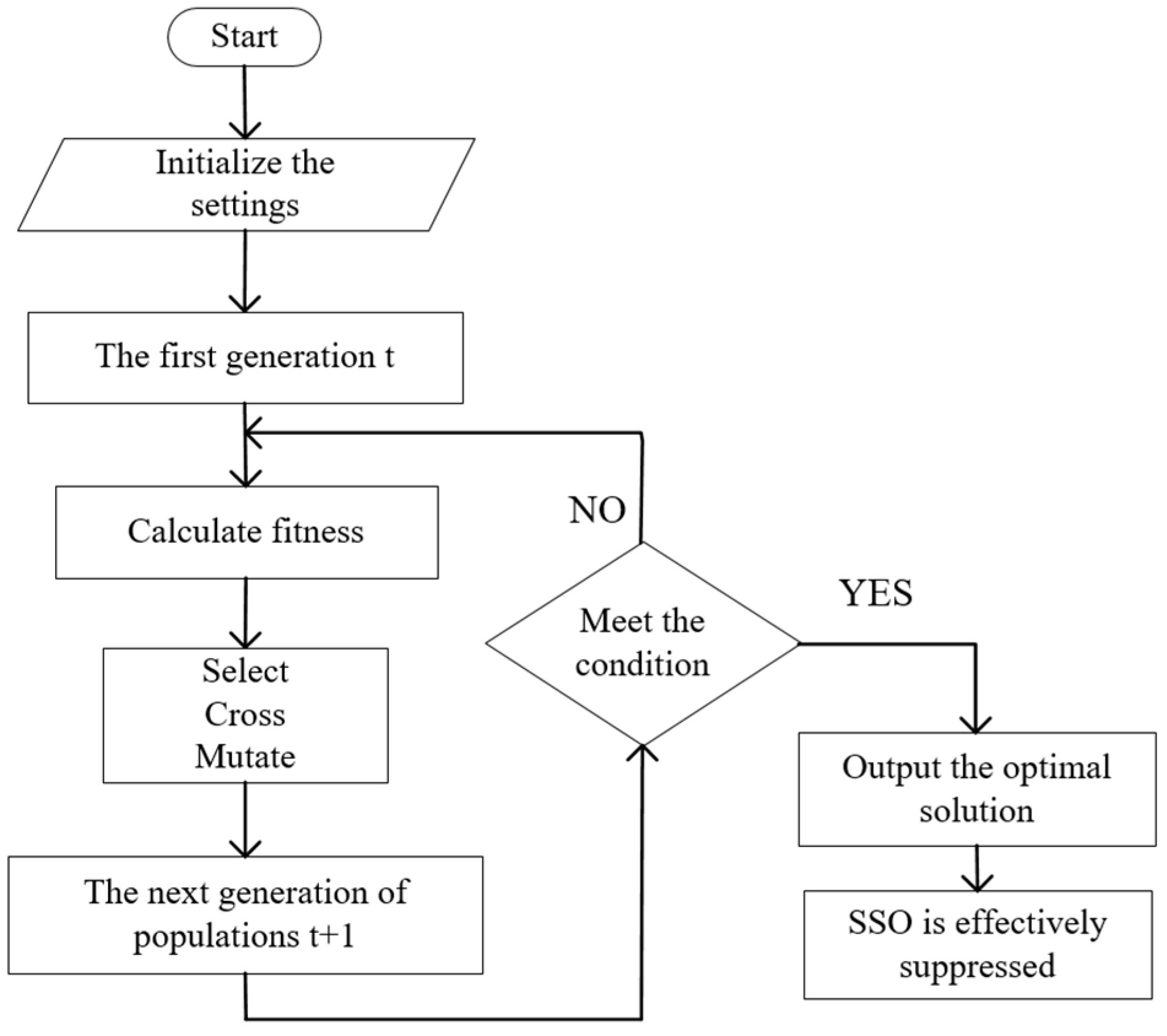
4. Parameter Optimization
- Initialize the population: select the dataset within the controllable range of the target parameters, and select the phase shift angle, gain, and serial compensation degree as the “genes” that can be operated. The initial parameters are set as follows: the crossing probability Pc is 0.5, the mutation probability Pm is 0.001, and the maximum number of iterations T is five.
- Calculate the fitness values for different parameter combinations.
- The cross-matching order is randomly generated, the cross-matching sequence is determined according to the crossover probability Pc, and the cross-operation is carried out one by one to generate a new group.
- Individuals are randomly selected to determine whether the gene fragment is mutated according to the mutation probability Pm, and the mutation operation of the single gene fragment is performed to generate a new population.
- Determine whether the suppression requirements are met; otherwise, proceed to Step 2 until the maximum number of iterations is reached, and the optimal solution is retained.
5. Simulation and Verification of SDC Inhibition Effect
5.1. Simulation and Verification of the Suppression Effect of SDCs Added to the Control System
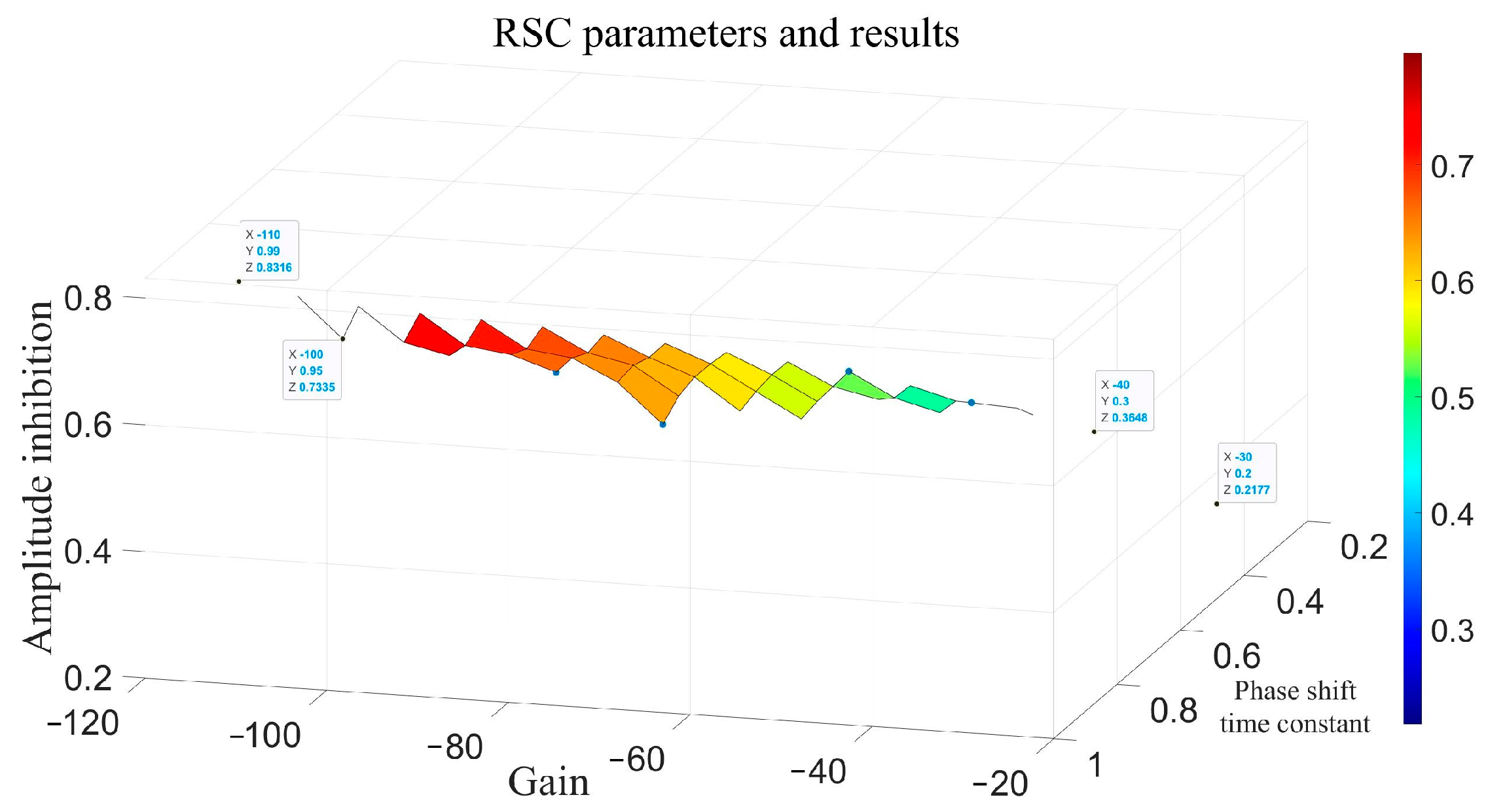
- To achieve optimization under this working condition, the value range of the SDC gain Kg in the GSC is [−10, −64], the value range of the SDC gain Kr in the RSC is [−30, −120], and the value range of the phase-shift time constant T in the two control systems is [0.2, 0.99].
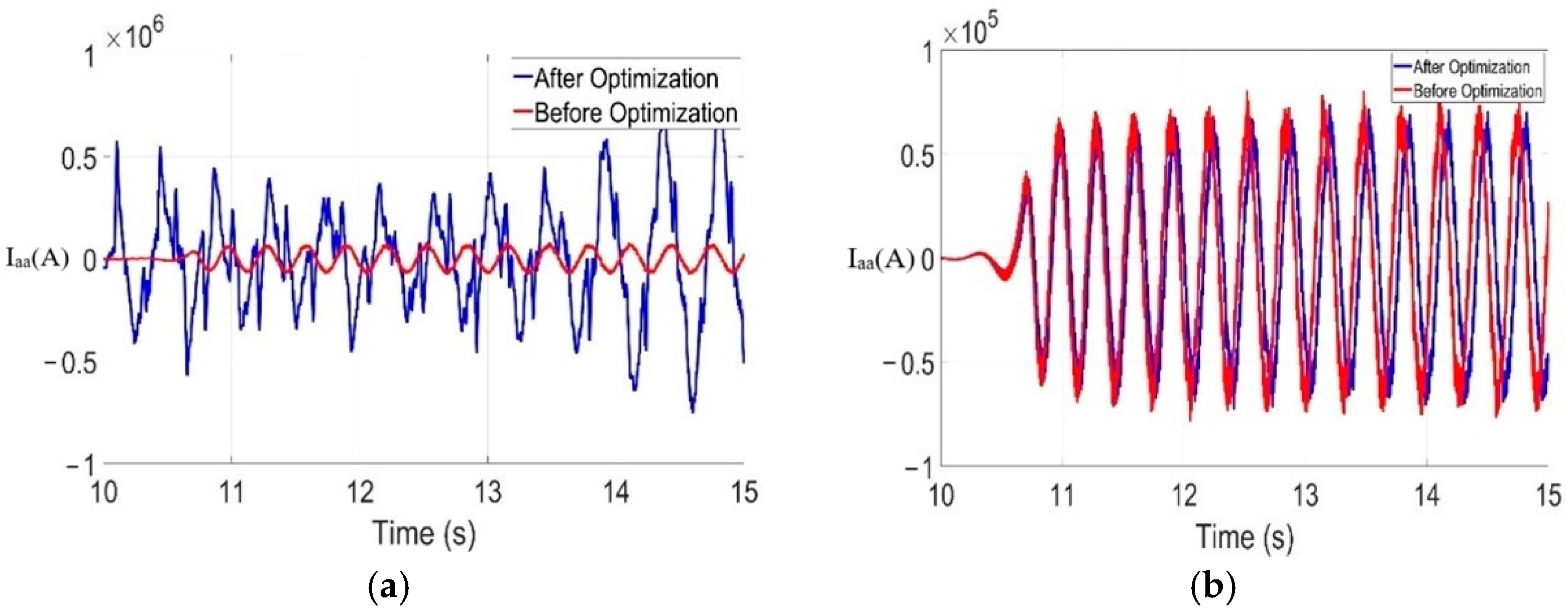
- The gain K is related to the phase-shift time constant T, and the parameters should be synchronously increased or decreased. When the absolute value of K is extremely large and that of T is extremely small, the system becomes unstable, as shown in Figure 8a. When the absolute value of K is too small and that of T is too large, the inhibition effect is extremely insignificant, as shown in Figure 8b.
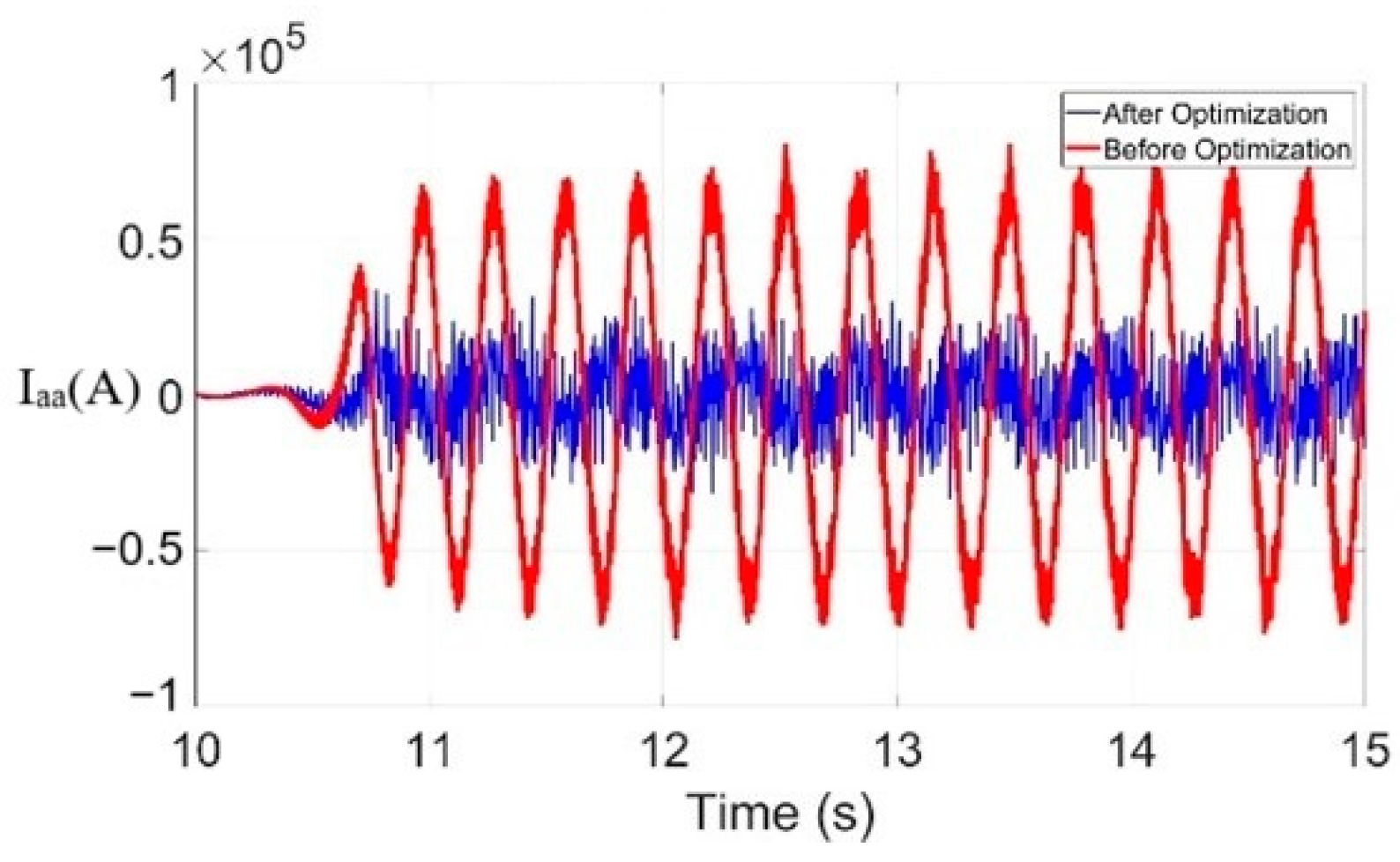
- When the absolute values of K and T were increased, the inhibition effect was better. The combined inhibition effect was the best at 85.99% when Kg = −64, Tg = 0.95, Kr = −100, and Tr = 0.95, as shown in Figure 7.
5.2. Simulation and Verification of the Suppression Effect of SDC Added into the Control System Alone
6. Conclusions
- An innovative optimization method based on coordinated control of the rotor and grid sides was proposed. Compared with the method of adding an SDC on only one side of the rotor or grid control system, the combined optimization effect was better, with an amplitude suppression rate reaching 85.99%, which can more effectively solve the SSO problem existing in the doubly fed wind power grid-connected system via series compensation.
- The genetic algorithm was used to optimize the design of the parameters of the SDC. Through the optimization algorithm, optimized suppression under all operating conditions can be achieved with different series compensation degrees, wind speeds, and numbers of wind turbines.
- The experimental module was established on the RTLAB platform to simulate the experimental effects under different operating conditions and conduct the simulation research. The experimental results are consistent with theoretical derivations, and the experimental conclusions provide a reference value for the setting of various parameter thresholds in engineering practice.
7. Outlook
- To explore the impact of adding the point location of the SDC in the control system on the SSO suppression effect.
- To investigate how to improve the fitness of the GA algorithm for the SDC model, thereby further enhancing the SSO suppression effect.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Global Wind Energy Report 2024. Available online: https://gwec.net/global-wind-report-2024/ (accessed on 10 December 2024).
- IRENA. Renewable Energy Statistics 2023; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2023. [Google Scholar]
- Liu, Y.; Wang, Z.; Shen, H.; Wei, Q.; Li, Q.; Zhang, X. The research of the superconducting magnetic energy storage model based on the real time digital system. In Proceedings of the 12th International Conference on Renewable Power Generation (RPG 2023), Shanghai, China, 14–15 October 2023; pp. 753–760. [Google Scholar] [CrossRef]
- Yang, W.; Liao, K.; Xiao, X.; Luo, C. Impact of Shunt reactor to DFIG Connected to Series-Compensated Power System on Sub-synchronous Oscillation Characteristics. MATEC Web Conf. 2018, 173, 02030. [Google Scholar]
- Ren, H.; Hou, B.; Zhou, G.; Shen, L.; Wei, C.; Li, Q. Variable Pitch Active Disturbance Rejection Control of Wind Turbines Based on BP Neural Network PID. IEEE Access 2020, 8, 71782–71797. [Google Scholar] [CrossRef]
- Dong, L.; Kong, J.; Feng, J.; Zhang, Y. Sub-synchronous Resonance Mitigation for Series Compensation Transmission System of DFIG Based on PR Control. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; pp. 734–738. [Google Scholar] [CrossRef]
- Chen, X.; Wang, Y.; Gong, C.; Sun, J. Overview of Stability Analysis of Grid-Connected Inverters Using Impedance Analysis Method. Proc. Chin. Soc. Electr. Eng. 2018, 38, 2082–2094. [Google Scholar]
- Sun, J. Impedance-based stability criterion for grid-connected inverters. IEEE Trans. Power Electron. 2011, 26, 3075–3078. [Google Scholar] [CrossRef]
- Zhen, Z.; Du, W.; Wang, H. Equivalence Proof of the Complex Torque Coefficient Method and Open-Loop Mode Stability Criterion in Strong Modal Coupling Phenomenon. Proc. Chin. Soc. Electr. Eng. 2019, 39, 2272–2279+10. [Google Scholar]
- Wang, Y.; Yu, H.; Liu, Z.; Ma, Y.; Zhao, G.; Deng, Z. Broadband Sub-synchronous Signal Extraction and Analysis of the Key Parameters. In Proceedings of the 2019 4th IEEE Workshop on the Electronic Grid (eGRID), Xiamen, China, 11–14 November 2019; pp. 1–6. [Google Scholar]
- Wen, B.; Boroyevich, D.; Burgos, R.; Mattavelli, P.; Shen, Z. Analysis of D-Q small-signal impedance of grid-tied inverters. IEEE Trans. Power Electron. 2016, 31, 675–687. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, X.; Liu, H.; Liu, H.; Li, Y.; Zhang, C. Characteristic analysis of sub-synchronous resonance in practical wind farms connected to series-compensated transmissions. IEEE Trans. Energy Convers. 2017, 32, 1117–1126. [Google Scholar] [CrossRef]
- Ma, N.; Du, W.; Liu, P. Risk Assessment of Sub/Super-Synchronous Oscillation for Wind Power Based on Hardware-in-the-Loop Testing. Proc. Chin. Soc. Electr. Eng. 2022, 42, 5497–5506. [Google Scholar] [CrossRef]
- Vieto, I.; Sun, J. Sequence impedance modeling and analysis of type-III wind turbines. IEEE Trans. Energy Convers. 2018, 33, 537–545. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, Y.; Xiao, Z.; Wang, Z.; Geng, Y.; Zhao, D. Research on Construction Scheme of New Generation Centralized Control Station Intelligent Monitoring System. In Proceedings of the 2023 3rd International Conference on Energy Engineering and Power Systems (EEPS), Dali, China, 28–30 July 2023; pp. 1004–1009. [Google Scholar] [CrossRef]
- Wang, Y.; Du, W.; Chen, C.; Wang, H. Study on Sub-synchronous Oscillation in Power Systems Caused by Wind Farms Connected to the Grid Based on Improved Complex Torque Coefficient Method. J. Electr. Eng. 2020, 35, 3258–3269. [Google Scholar]
- Miao, Z. Impedance-model-based SSR analysis for type 3 wind generator and series-compensated network. IEEE Trans. Energy Convers. 2012, 27, 984–991. [Google Scholar] [CrossRef]
- Yin, M.X.; Liu, H.; Li, Y.H.; Song, W. Research on the Impact on Sub-synchronous Resonance Risk from DFIG Number and Series-compensated Degree. J. Phys. Conf. Ser. 2018, 1087, 042075. [Google Scholar] [CrossRef]
- Chi, Y.; Liu, Y.; Wang, W.; Dai, H. Voltage Stability Analysis of Wind Farm Integration into Transmission Network. In Proceedings of the 2006 International Conference on Power System Technology, Chongqing, China, 22–26 October 2006; pp. 1–7. [Google Scholar] [CrossRef]
- Ghennam, T.; Berkouk, E.M.; Francois, B. DC-link voltage balancing algorithm using a space-vector hysteresis current control for three-level VSI applied for wind conversion system. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar]
- Liu, H.; Xie, X.; He, G. Impedance Modelling in Synchronous Reference Frame and Stability Discrimination Method for Grid-Connected New Energy Generation Systems. Proc. CSEE 2017, 37, 4002–4007. [Google Scholar]
- Li, Y.; Zhao, S.; Ma, Y. Impedance Modelling and Characteristic Analysis of Three-Phase LCL Grid-Connected Inverter. Electr. Power Autom. Equip. 2019, 39, 107–113. [Google Scholar]
- Xu, Y.; Zhao, S. Mitigation of Sub-synchronous Resonance in Series-Compensated DFIG Wind Farm Using Active Disturbance Rejection Control. IEEE Access 2019, 7, 68812–68822. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning | Parameter | Meaning |
|---|---|---|---|
| GSC three-phase AC modulation voltage | PWM gain | ||
| RSC three-phase AC modulation voltage | Stator and rotor turns ratio | ||
| DC voltage | GSC three-phase AC modulation signal | ||
| Three-phase AC voltage | GSC three-phase AC current |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Rated power | 1.5 MW | Rotor resistance | 0.01827 p.u. |
| Rated frequency | 50 Hz | Rotor self-sensing | 0.2222 p.u. |
| Stator rated voltage | 0.690 kV | Excitation inductance | 15.71 p.u. |
| Rotor rated voltage | 1.975 kV | Stator resistance | 0.01638 p.u. |
| Constant of inertia | 0.0685 s | Stator self-sensing | 0.2552 p.u. |
| GSC scale factor | 0.83 | GSC points factor | 5 |
| RSC scale factor | 0.6 | RSC points factor | 8 |
| Number | Kg | Tg | Kr | Tr | β |
|---|---|---|---|---|---|
| 1 | −64 | 0.99 | −110 | 0.99 | 84.70% |
| 2 | −68 | 0.99 | −120 | 0.99 | 85.15% |
| 3 | −10 | 0.2 | −30 | 0.2 | 37.14% |
| 4 | −25 | 0.5 | −60 | 0.5 | 65.58% |
| 5 | −50 | 0.8 | −70 | 0.8 | 78.22% |
| 6 | −64 | 0.95 | −100 | 0.95 | 85.99% |
| Group | SDC Location | Kg | Tg | Kr | Tr | β |
|---|---|---|---|---|---|---|
| 1 | GSC | −10 | 0.2 | - | - | 31.09% |
| RSC | - | - | −30 | 0.2 | 21.77% | |
| GSC + RSC | −10 | 0.2 | −30 | 0.2 | 37.14% | |
| 2 | GSC | −25 | 0.5 | - | - | 58.88% |
| RSC | - | - | −60 | 0.5 | 52.73% | |
| GSC + RSC | −25 | 0.5 | −60 | 0.5 | 65.58% | |
| 3 | GSC | −50 | 0.8 | - | - | 75.72% |
| RSC | - | - | −70 | 0.8 | 56.27% | |
| GSC + RSC | −50 | 0.8 | −70 | 0.8 | 78.22% | |
| 4 | GSC | −64 | 0.95 | - | - | 83.31% |
| RSC | - | - | −100 | 0.95 | 73.35% | |
| GSC + RSC | −64 | 0.95 | −100 | 0.95 | 85.99% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Xie, Y.; Xie, Q.; Huang, H.; Gao, L.; Ye, J.; Ma, S. Optimization Control of Sub-Synchronous Oscillations in Doubly Fed Generators with Wind Turbines Using the Genetic Algorithm. Appl. Sci. 2025, 15, 1353. https://doi.org/10.3390/app15031353
Zhang X, Xie Y, Xie Q, Huang H, Gao L, Ye J, Ma S. Optimization Control of Sub-Synchronous Oscillations in Doubly Fed Generators with Wind Turbines Using the Genetic Algorithm. Applied Sciences. 2025; 15(3):1353. https://doi.org/10.3390/app15031353
Chicago/Turabian StyleZhang, Xu, Yuhan Xie, Qiman Xie, Hui Huang, Lintao Gao, Jun Ye, and Shenbing Ma. 2025. "Optimization Control of Sub-Synchronous Oscillations in Doubly Fed Generators with Wind Turbines Using the Genetic Algorithm" Applied Sciences 15, no. 3: 1353. https://doi.org/10.3390/app15031353
APA StyleZhang, X., Xie, Y., Xie, Q., Huang, H., Gao, L., Ye, J., & Ma, S. (2025). Optimization Control of Sub-Synchronous Oscillations in Doubly Fed Generators with Wind Turbines Using the Genetic Algorithm. Applied Sciences, 15(3), 1353. https://doi.org/10.3390/app15031353