1. Introduction
Resident Space Objects (RSOs) are man-made objects orbiting the Earth, including satellites, space stations, and space debris. These objects remain in space for long periods, posing a significant threat to currently operational space assets [
1]. To reduce the risk of on-orbit collisions, spacecraft operators must improve situational awareness of potential RSO threats, especially non-cooperative targets, including non-cooperative satellites and space debris. With the gradual application of electric propulsion technology to all kinds of space missions [
2,
3,
4,
5], such as the deployment, orbit maintenance, and de-orbiting operation of Starlink and other giant low-orbit constellations, the number of satellites maneuvering in space is increasing, which also increases the difficulty of situational awareness. Currently, RSO monitoring and cataloging methods include ground-based observations and Space-Based Space Surveillance (SBSS). Spaceborne sensors have high accuracy, wide fields of view, and are less affected by weather conditions. Various techniques, including multiple hypothesis methods [
5], genetic algorithms [
6], and various estimation methods such as batch estimators [
7] and sequential estimators [
2,
3,
4,
5,
6,
7,
8,
9], as well as data fusion methods [
1], are applied in SBSS. However, using spaceborne angle-only measurements for precise orbit estimation is a major challenge. The inherent field-of-view limitations of spaceborne Electro-Optical Sensors (EOSs) results in RSOs being observable only over very short arcs, often producing inaccurate results. Ground-based observations are a more stable monitoring method.
There are many methods for the orbit determination of maneuvering targets based on ground observations, which can be broadly divided into three categories: orbit determination process restart, filtering methods, and maneuver reconstruction.
The orbit determination process restart method does not consider the pre-maneuver orbit and instead reinitializes the post-maneuver orbit by directly increasing the filter’s uncertainty (covariance). Although this method is simple, it cannot model the maneuver process. Unlike with non-motorized satellites, there is uncertainty in the dynamics model of the orbit determination problem of motorized satellites. If the unknown maneuvers are not correctly compensated, the orbiting accuracy will be seriously affected.
Kalman filtering algorithms are widely used in the orbit determination of maneuvering targets. These commonly used filtering methods can be further classified into three categories: single model-based adaptive Kalman filtering algorithms [
10], multi modeling algorithms [
11], and decision-based adaptive Kalman filtering algorithms [
12]. XingYu Zhou [
10] address the GEO satellite station maintenance problem by defining a new control index for limited thrust transfer, establishing a permissible control region for maneuver detection, and then proposing a particle filtering-based tracking method for low-orbit surveillance radar trajectory tracking, which maintains surveillance of the target under data-scarcity conditions even if it is observed only by the surveillance radar under prolonged continuous thrust maneuvers. G. Escribano et al. [
11] establish an eighth-order polynomial to model the unknown maneuver, and estimate the polynomial coefficients using a Long Short-Term Memory (LSTM) neural network. This does not rely on good maneuver detection and initial values of the maneuver parameters, and makes up for the shortcomings of the traditional adaptive Kalman filtering algorithm with a single model. Jidan Zhang [
12] proposed an improved thrust Fourier coefficient model using the orbit averaging method. They also proposed a robust optimization algorithm based on the extended Kalman filtering method combining IDE and equivalent noise to improve the orbit setting accuracy. The filtering method is able to compensate for unknown maneuvers and solve the orbit determination problem for continuous thrust targets, but it cannot provide specific maneuver parameters for better subsequent target tracking, i.e., maneuver reconstruction.
Filtering methods can compensate for unknown maneuvers and solve the orbit determination problem for continuous-thrust targets, but they cannot provide specific maneuver parameters for better subsequent tracking—that is, maneuver reconstruction.
Maneuver reconstruction methods aim to reconstruct the actual maneuver process, including detailed information such as thrust magnitude, maneuver time, and thrust direction. Different types of thrust correspond to specific dynamic models during reconstruction.
Yu et al. [
13] derive two maneuver models based on the integration of Lagrange equations, solving the orbit maneuver detection problem for chemical propulsion maneuvers from a dynamics perspective. Using only two orbits (pre- and post-maneuver), they can not only determine whether a maneuver occurred but also obtain detailed maneuver information, including average maneuver time and maneuver magnitude. Zhou et al. [
14] propose an improved second-order state transition tensor orbit propagation method via orbit segmentation and segment connection, accounting for maneuver uncertainty. They incorporate unknown maneuver magnitude, direction, and time into the orbital state, solving for a second-order optimal orbit determination estimate for thrust parameters. This method provides an accurate solution for unknown maneuvers.
Gary M. Goff et al. [
15] investigated the effect on the maneuvers’ reconfiguration success rate based on maneuver type, tracking antenna performance, antenna coverage, error covariance level, and number of satellite passes after the maneuver. Hengnian Li [
16] established a variable mass dynamics model for the continuous thrust control process. With the extended Kalman filter orbit determination algorithm, the continuous thrust variable acceleration can be estimated in real time, but it requires a long tracking observation arc segment. The initial values of thrust parameters used in the maneuver reconstruction process are often historical empirical values or the initial values are directly set to zero, an approach that may lead to slow or no convergence of the precision orbiting process. For non-cooperative maneuvering spacecraft with unknown orbits and thrust parameters, a set of initial values for the orbital roots and thrust parameters that are relatively close to the true values is needed to improve the accuracy and efficiency of the precision orbit setting.
The paper is organized as follows:
Section 2 models the continuous thrust dynamics;
Section 3 describes the orbit determination method used to calculate the orbit elements;
Section 4 discusses the relationship between the continuous low thrust and the variation in each orbital elements;
Section 5 gives a pre-identification method for the direction and magnitude of the continuous low thrust;
Section 6 describes the simulated test scenarios and gives an analysis of the results; finally,
Section 7 concludes.
3. Single-Arc Least-Squares Orbit Determination
Initial orbit determination usually considers two-body dynamic models, the results of which provide initial values for precision orbit determination without the use of optimal estimation theory. For radar observations, the commonly used algorithms for initial orbit determination are the Gibbs method and the Herrick–Gibbs method. For measured angular data only, commonly used algorithms for initial orbit determination include the Laplace method, Gaussian method, and Gooding method.
Initial orbit determination is usually carried out using single-arc measurements. However, individual observation arcs are usually short (low-orbit target arcs are usually only a few minutes to ten minutes) and orbit determination accuracy is limited. The process of orbital change under continuous thrust involves low thrust and a slow rate of change in orbital elements. If the orbit determination accuracy is too low, it will lead to a large relative error in the thrust acceleration calculation. In order to improve the accuracy of orbit determination for single-arc segments, the least-squares method of orbit determination considering the J2 term perturbation is used.
Define the
n sets of noisy measurements of distance, azimuth, and pitch angle obtained by ground-based radar observation equipment as
Let the truth value of the measurement sequence be
Assuming that the observation errors follow a normal distribution with a mean squared error of
, the statistical properties of the observations are
Define the state quantities of the dynamic system as
, where
The systematic observation model is
where
is the systematic observation noise.
The least-squares orbit determination problem is described as solving for the optimal estimate of the orbit state
at a given calendar moment
using a least-squares criterion that minimizes the sum of squares of the weighted residuals of the theoretical and actual observations.
where a matrix of weights
is given to account for the accuracy of different observations, usually weighted by the inverse of the error in the observations
.
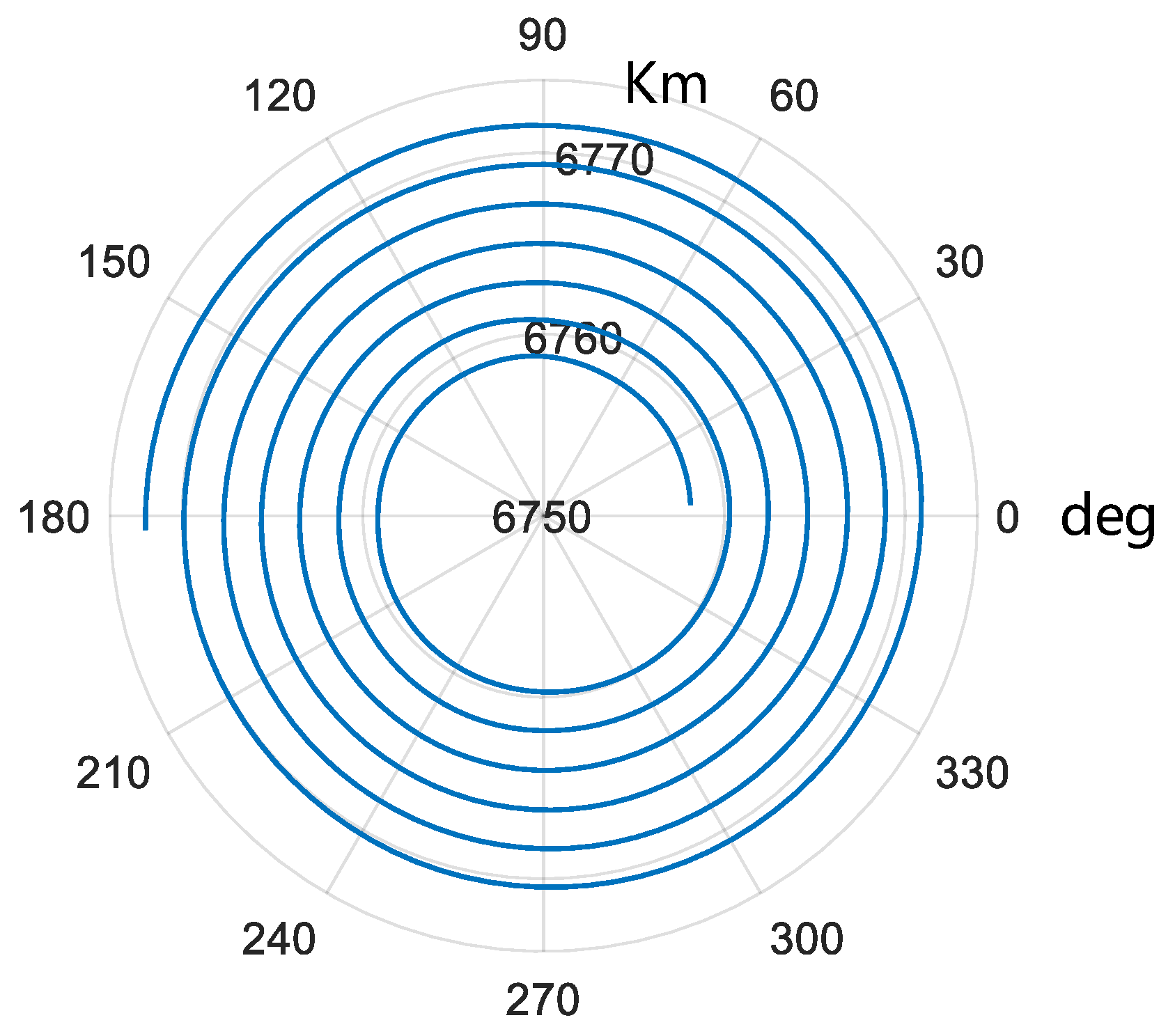
6. Simulation Analyses
We carried out simulation analyses of scenarios in which the number of satellite orbital elements is changed under continuous low thrust, given a satellite with an initial orbital altitude of 380 km and a continuous low thrust applied at 12:00 on 25 January 2024. The thrust parameters are set with reference to Starlink V2.0mini. The thruster specific impulse is 2500 s, the electric thrust magnitude is 170 mN, and the thrust acceleration is 2.26 × 10
−4 m/s
2. The initial orbital elements of the satellite ignition point are shown in
Table 2, and other simulation parameters were set as in
Table 1.
Assuming that radar equipment located at different locations can acquire satellite measurements, information on the distribution location of radar equipment is shown in
Table 3. It is assumed that the radar distance measurement accuracy is 30 m (1σ), the angle measurement accuracy is 0.01° (1σ), and the minimum elevation angle is 5°. The simulation gives radar measurements of the satellite (azimuth, elevation, and range).
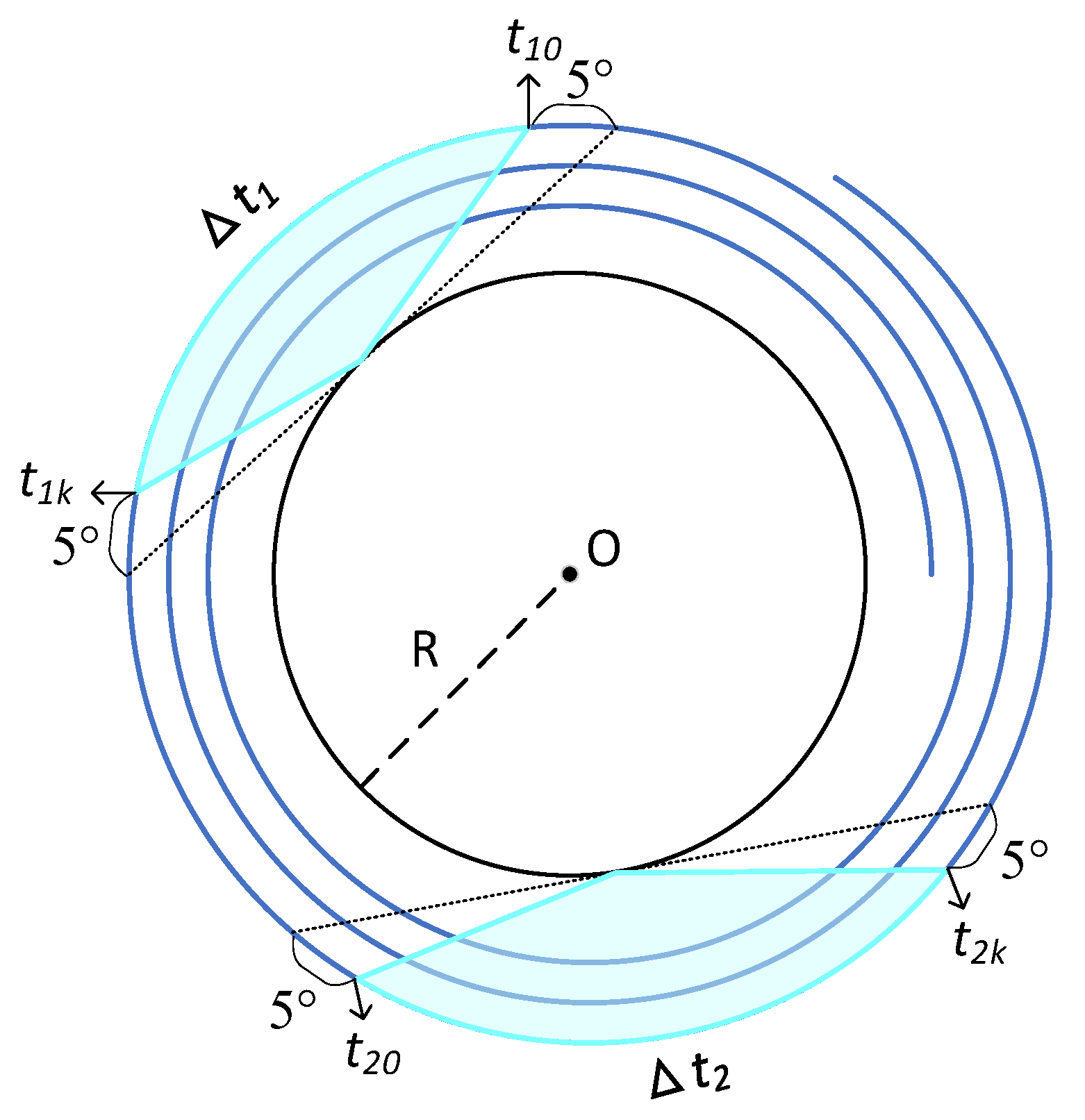
The thrust acceleration results are derived from the inverse solution of two radar observations separated by a certain length of time. Let the initial moments of the two radar observation arcs be , , and the ending moments be , , and the observation durations be , . The time intervals between them are denoted as Δt. The length of the visible arc segment at a single station varies from 3 to 9 min depending on the different positions of the satellite in relation to the station. In order to ensure the accuracy of the semi-major axis solution, only arc segments with observed arc segments greater than 6 min were selected for orbit determination.
6.1. Pre-Identification of Continuous Tangential Thrust Parameters
Take, for example, the two observations described in
Table 4.
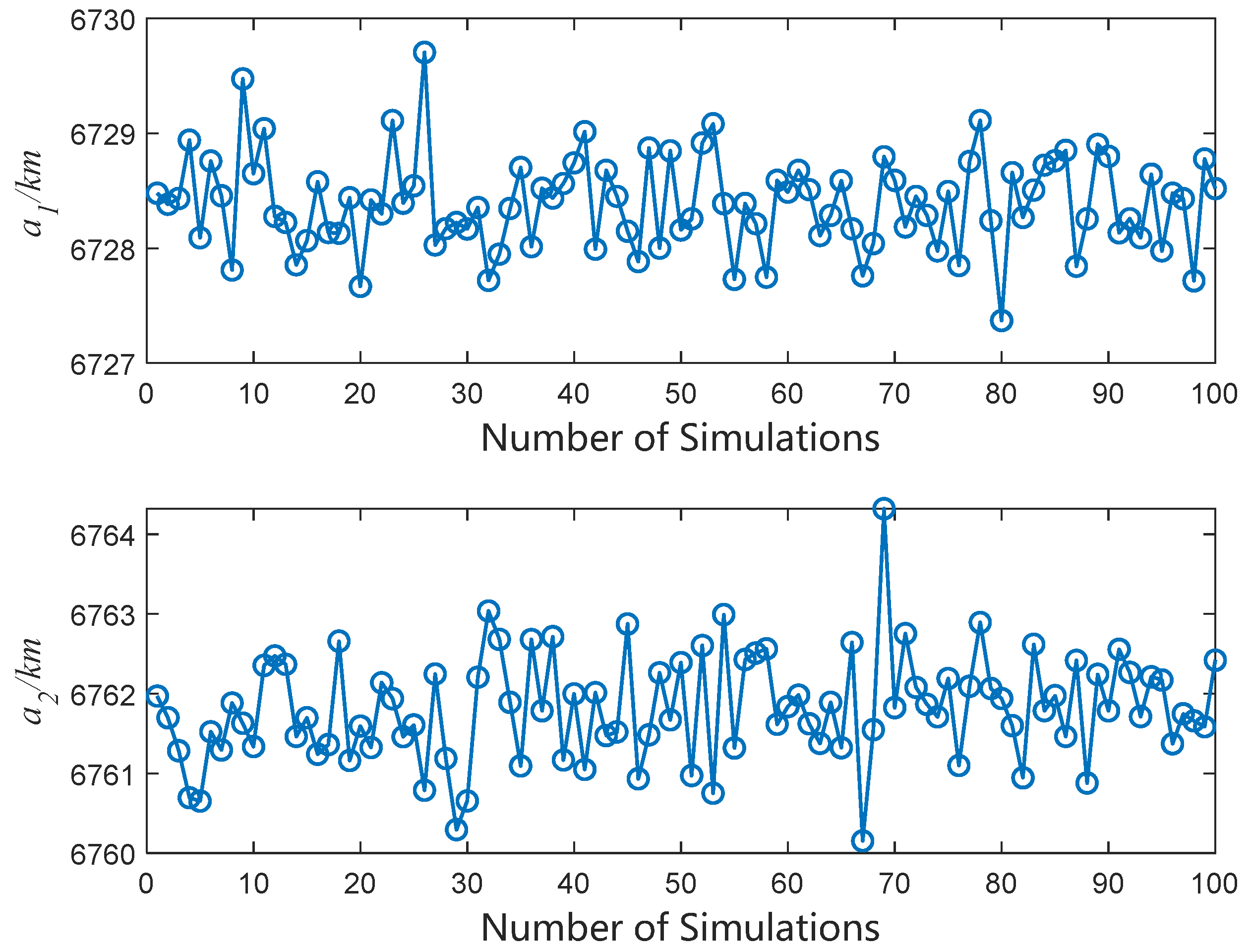
The two observations were each simulated 100 times, and each simulation exhibited a different random observation error after using the single-arc segment orbit determination method described in
Section 3 to obtain the semi-major axes of the two arc segments noted as
,
. The results are shown in
Figure 8.
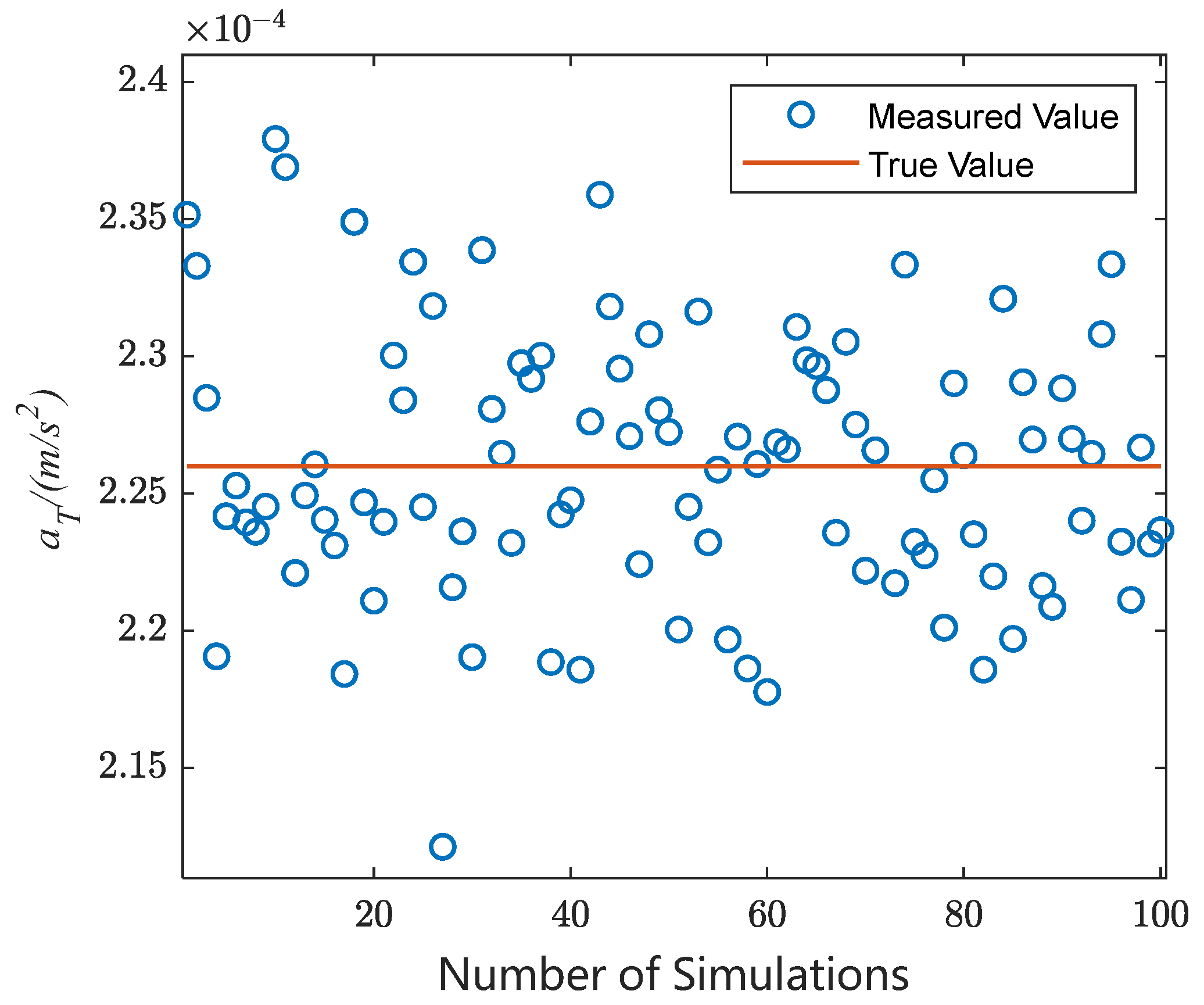
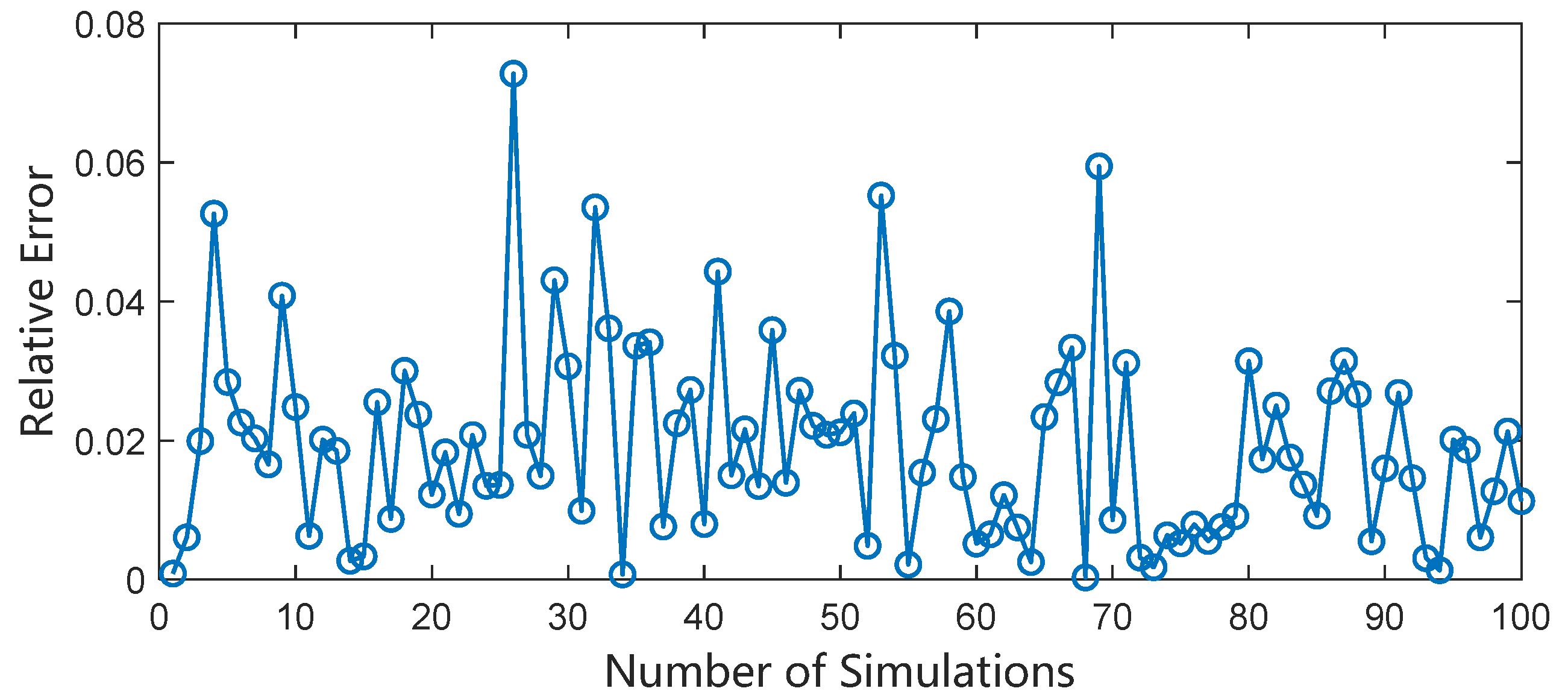
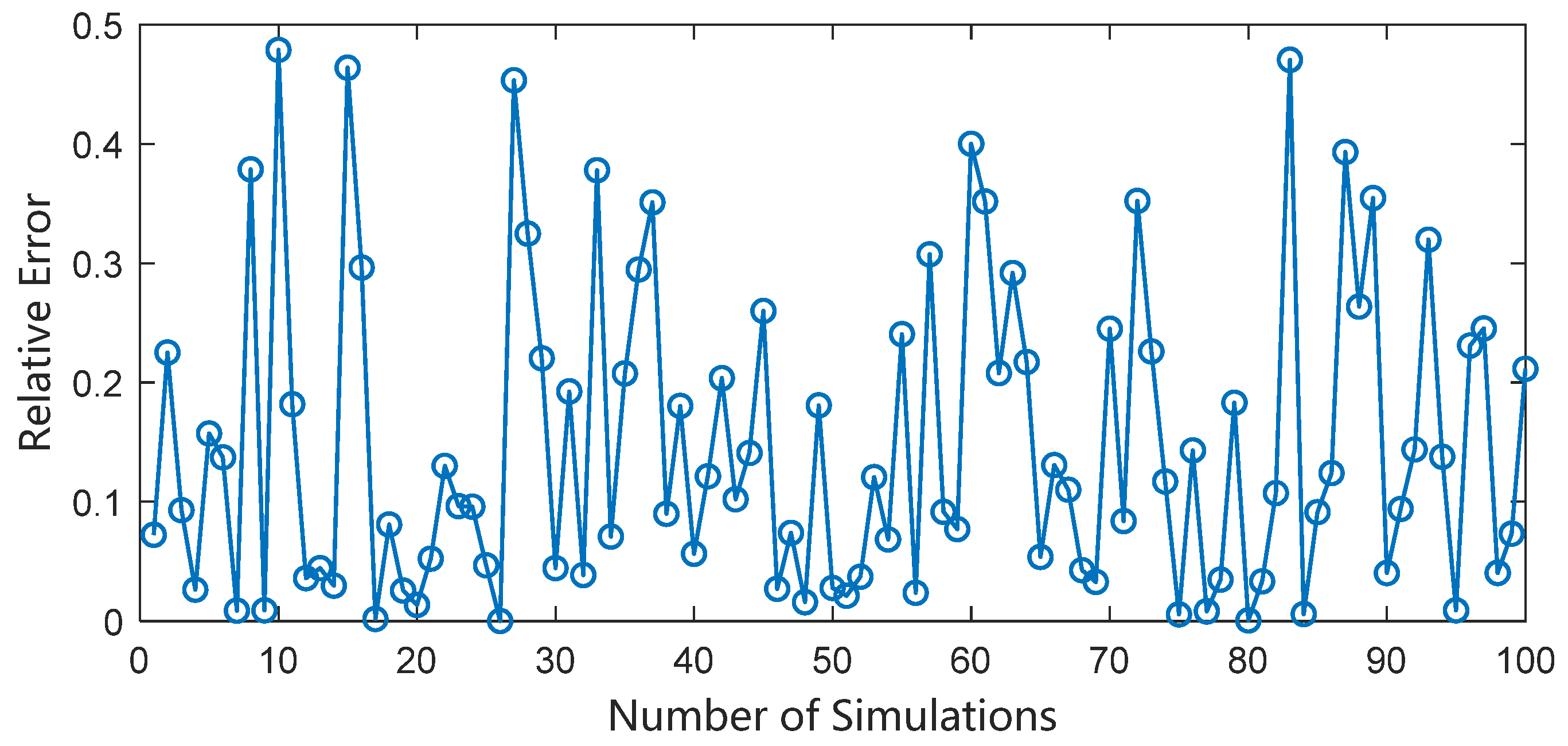
According to Equation (20), the tangential acceleration is solved inversely by
and
. The results are shown in
Figure 9, and the relative error of tangential acceleration is shown in
Figure 10. It can be seen that the average relative error of solving the tangential acceleration based on two arc segments separated by 23 h is only 3.2%.
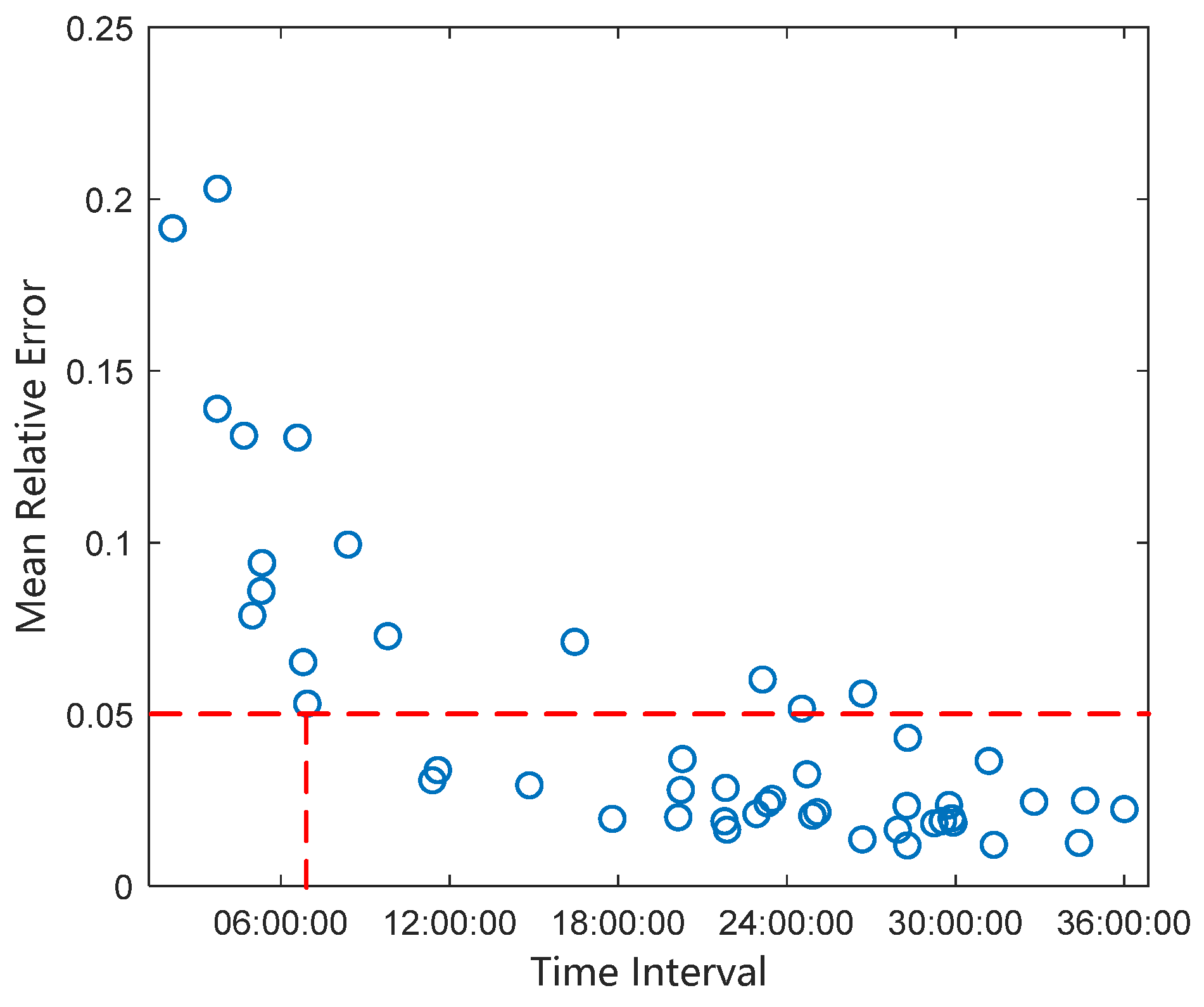
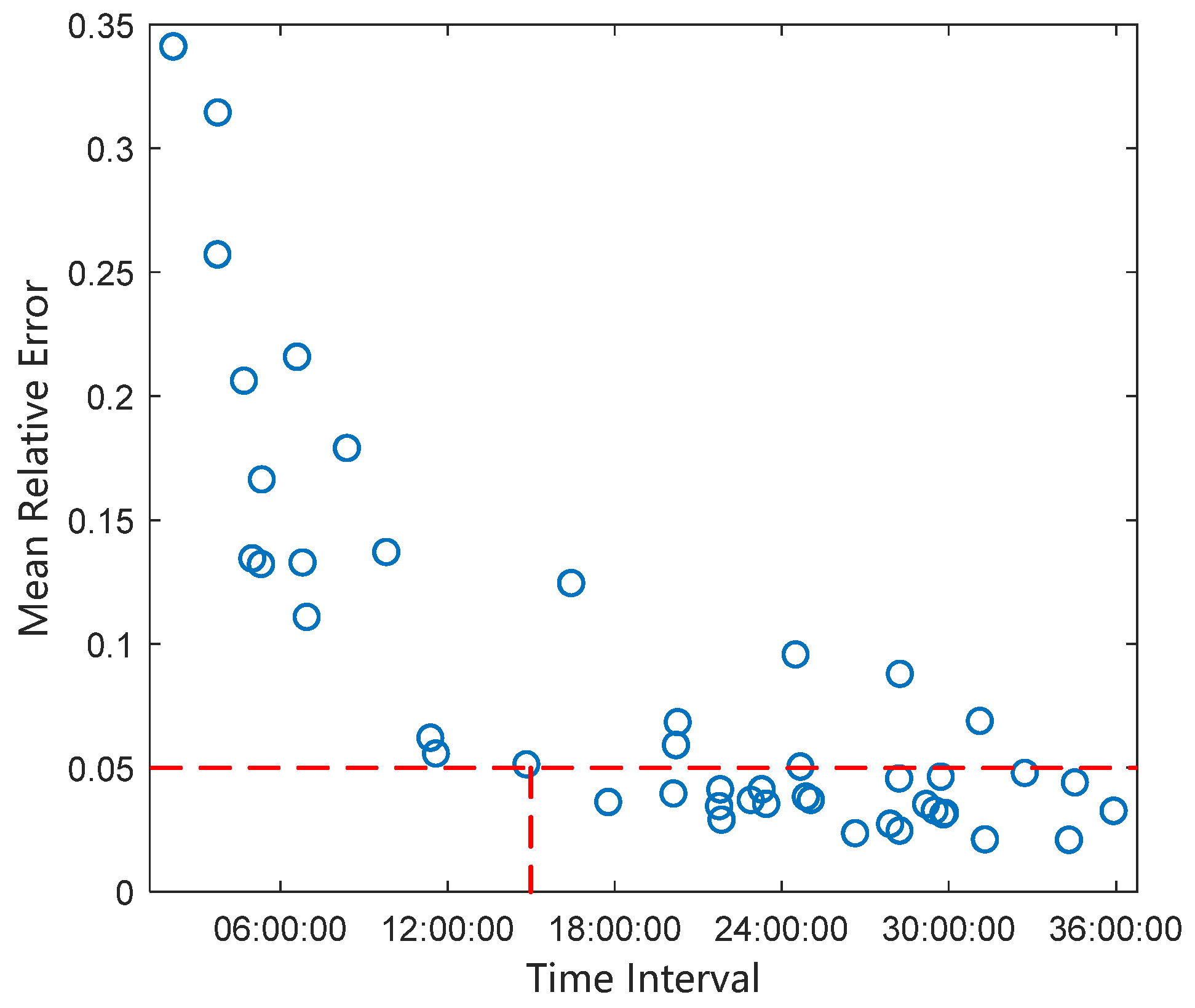
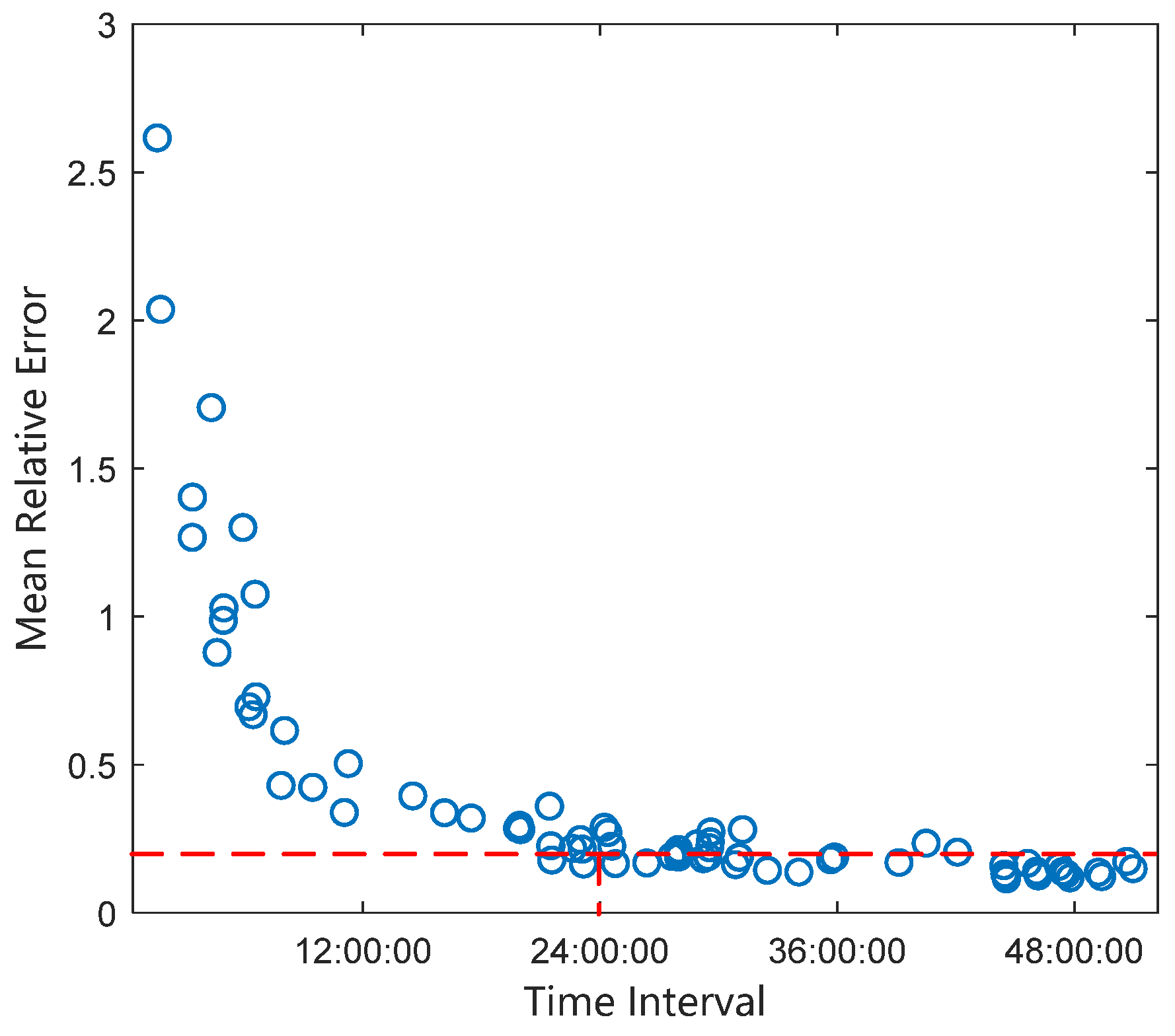
The tangential acceleration and its average relative error were calculated from radar observation arcs at different time intervals, and the relationship between the relative error of tangential acceleration and the observation time interval is shown. When the time interval between two observations is greater than 7 h, the relative measurement error of tangential acceleration can reach 5% or less. This is shown in
Figure 11. The circles in the figure represent the average relative error values of 100 observations at that moment.
Electric propellers usually have multi-mode operation capability, and their performance in terms of thrust, power, and specific impulse can be optimally adjusted according to different mission requirements, with strong mission adaptability. The smaller the tangential acceleration, the slower the rate of change of the semi-major axis and, consequently, the poorer the accuracy of the tangential acceleration inversely solved from the orbit determination of the two radar observations. A longer interval between two radar observations is required to achieve a relative measurement error of 5%.
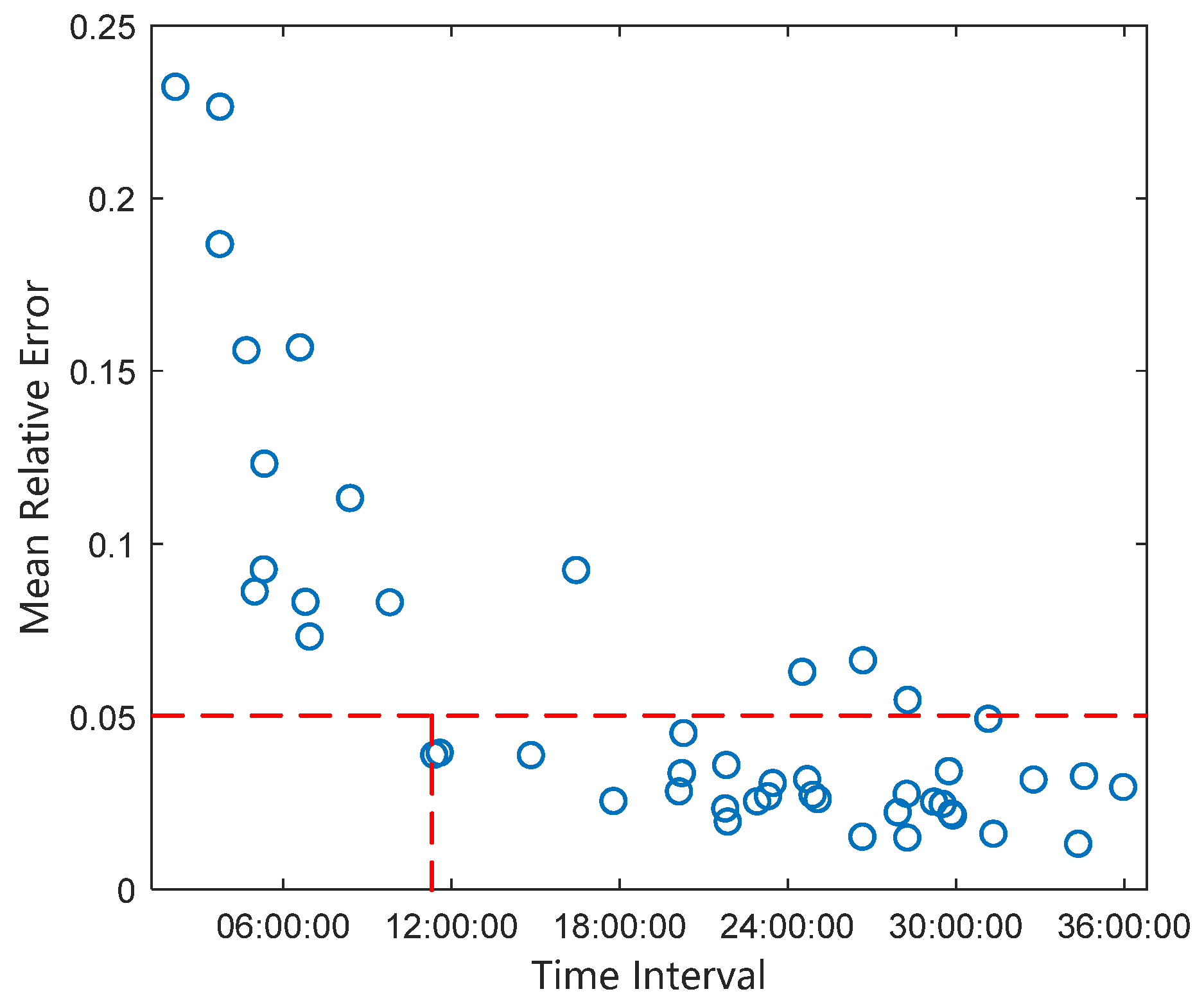
The simulation is set up with continuous tangential accelerations of 1.8 × 10
−4 m/s
2, 1.3 × 10
−4 m/s
2 and 0.5 × 10
−4 m/s
2. The results are shown in
Figure 12,
Figure 13, and
Figure 14, respectively.
When the continuous tangential acceleration is 1.8 × 10−4 m/s2 and the interval between two radar observations is greater than 11 h, a solution error of 5% or less can be achieved. When the continuous tangential acceleration is 1.3 × 10−4 m/s2 and the interval between two radar observations is greater than 15 h, a solution error of 5% or less can be achieved. When the continuous low-thrust acceleration is 0.5 × 10−4 m/s2, the change in track elements caused by thrust is too small, the error of thrust parameter identification is large in the short cycle, and the pre-identification of tangential acceleration below 5% cannot be achieved within 24 h.
6.2. Pre-Identification of Continuous Normal Thrust Parameters for Changing Inclinations
Take, for example, the two observations described in
Table 5.
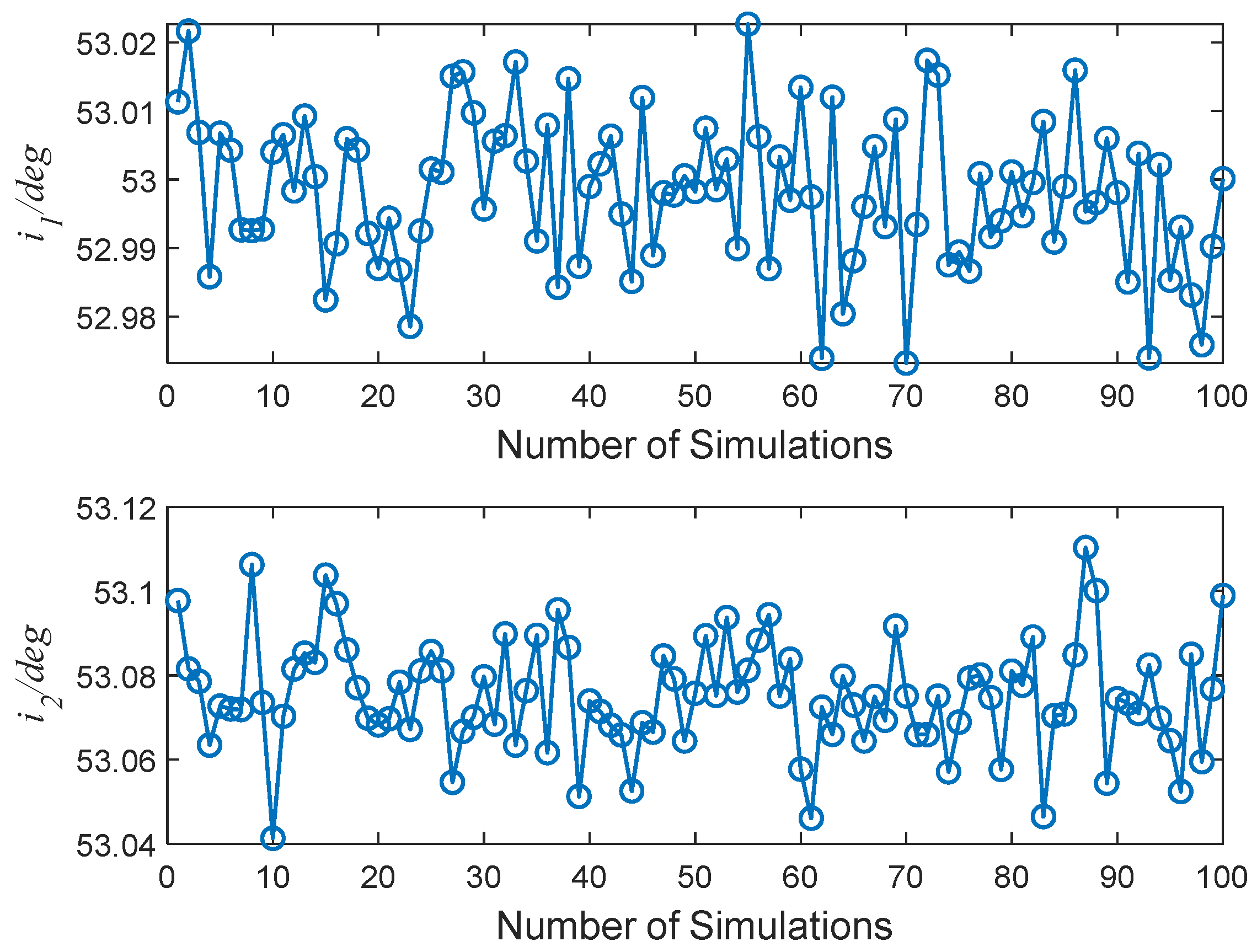
The two observations are simulated 100 times, and each simulation exhibits a different random observation error when using the single-arc segment orbit determination method described in
Section 3 to obtain the orbit inclination of the two arc segments noted as
,
. The results are shown in
Figure 15.
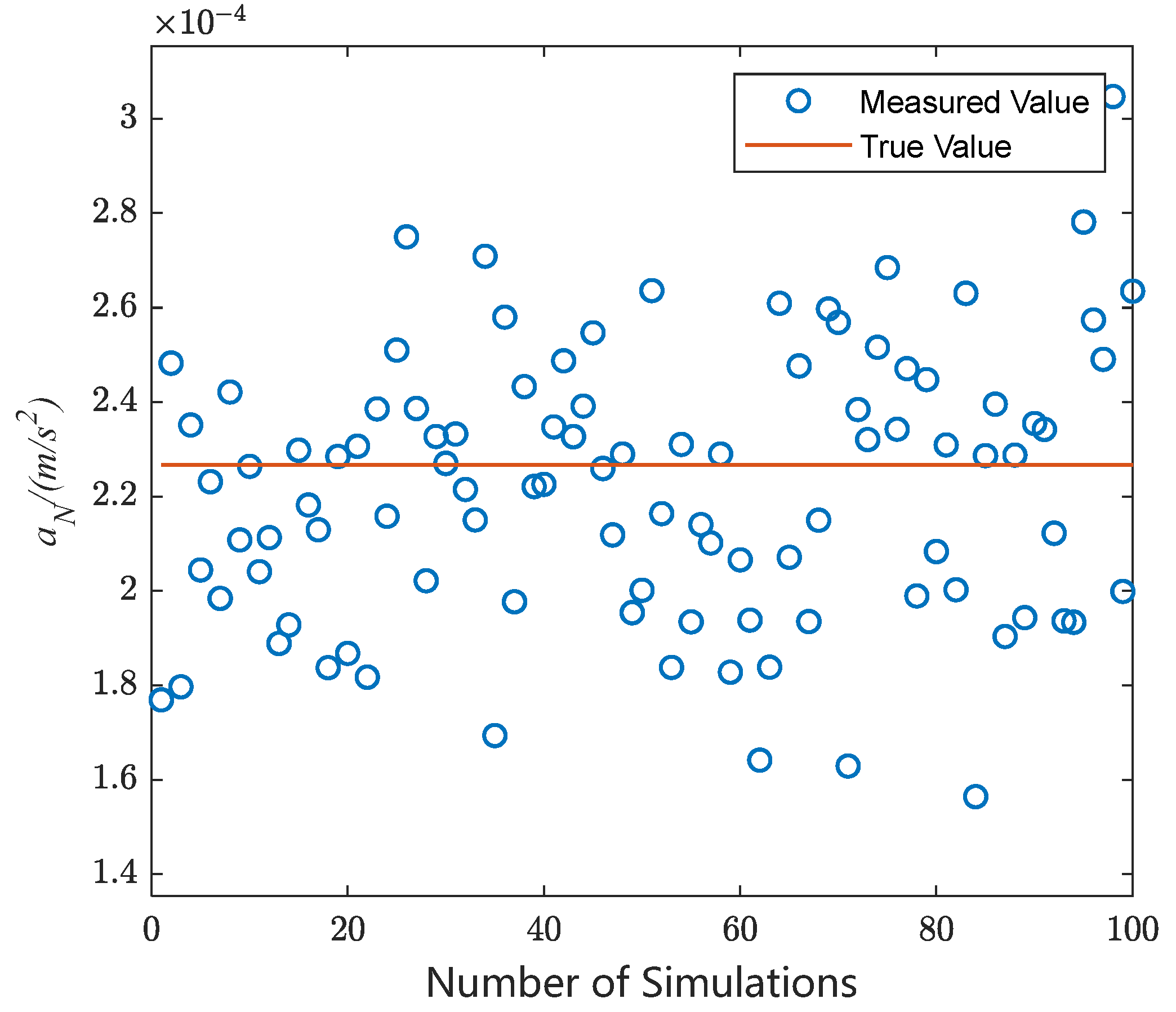
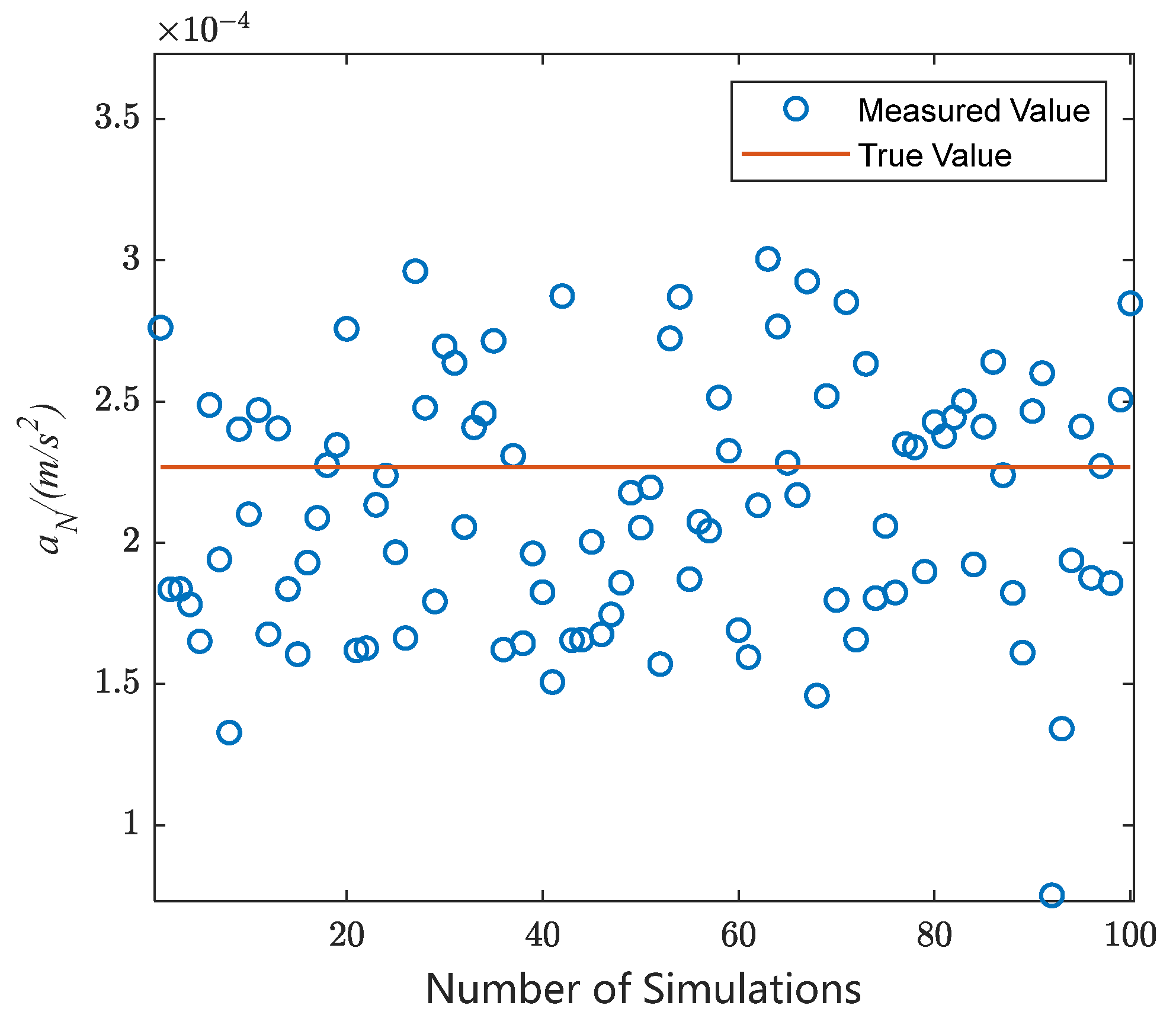
According to Equation (26), the normal acceleration is solved inversely by
and
; the result is shown in
Figure 16. The relative error in normal acceleration is shown in
Figure 17. It can be seen that solving for the normal acceleration based on two arcs separated by 23 h gives an average relative error of 21.5%.
6.3. Pre-Identification of Continuous Normal Thrust Parameters for Changing RAAN
Take, for example, the two observations described in
Table 6.
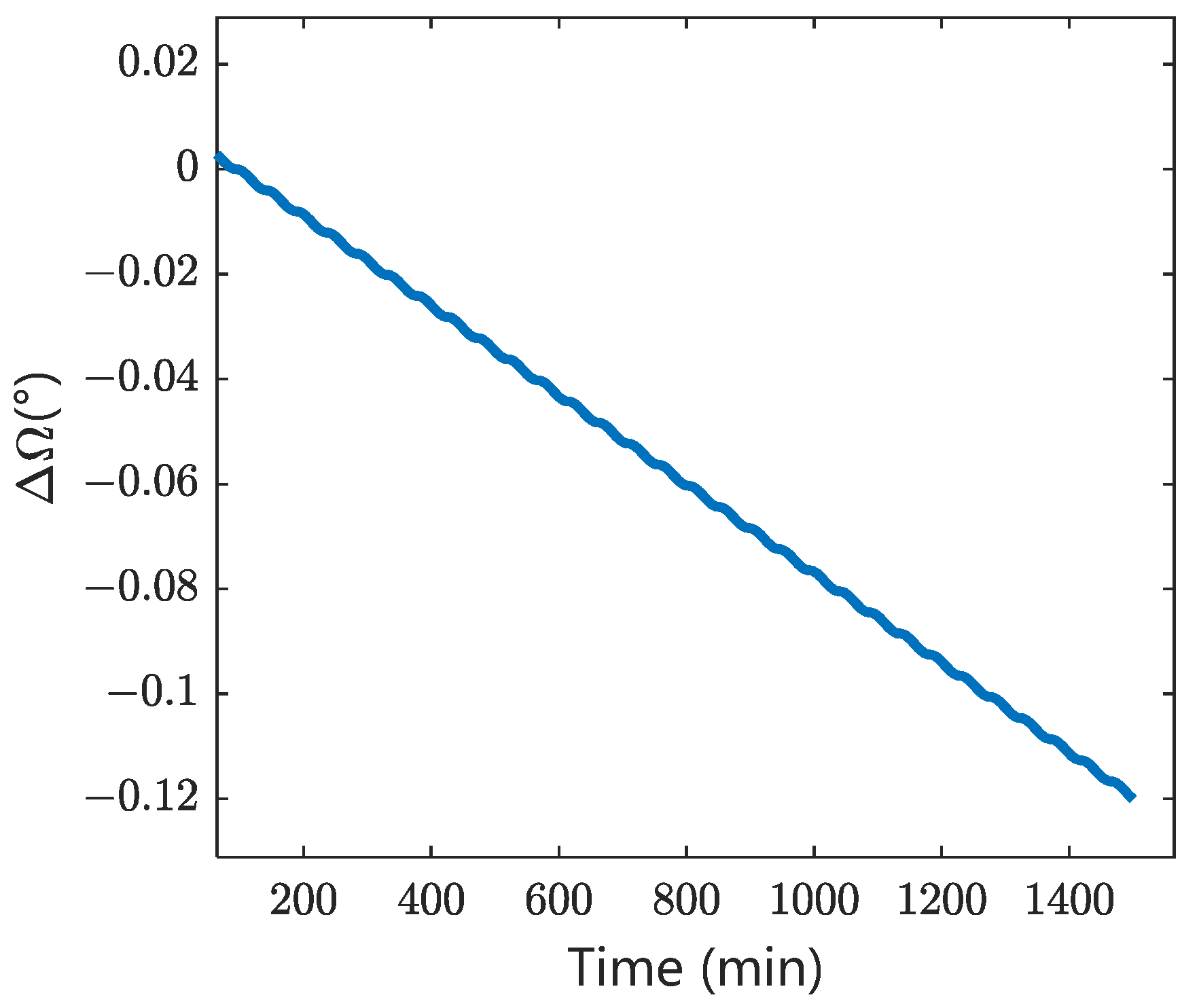
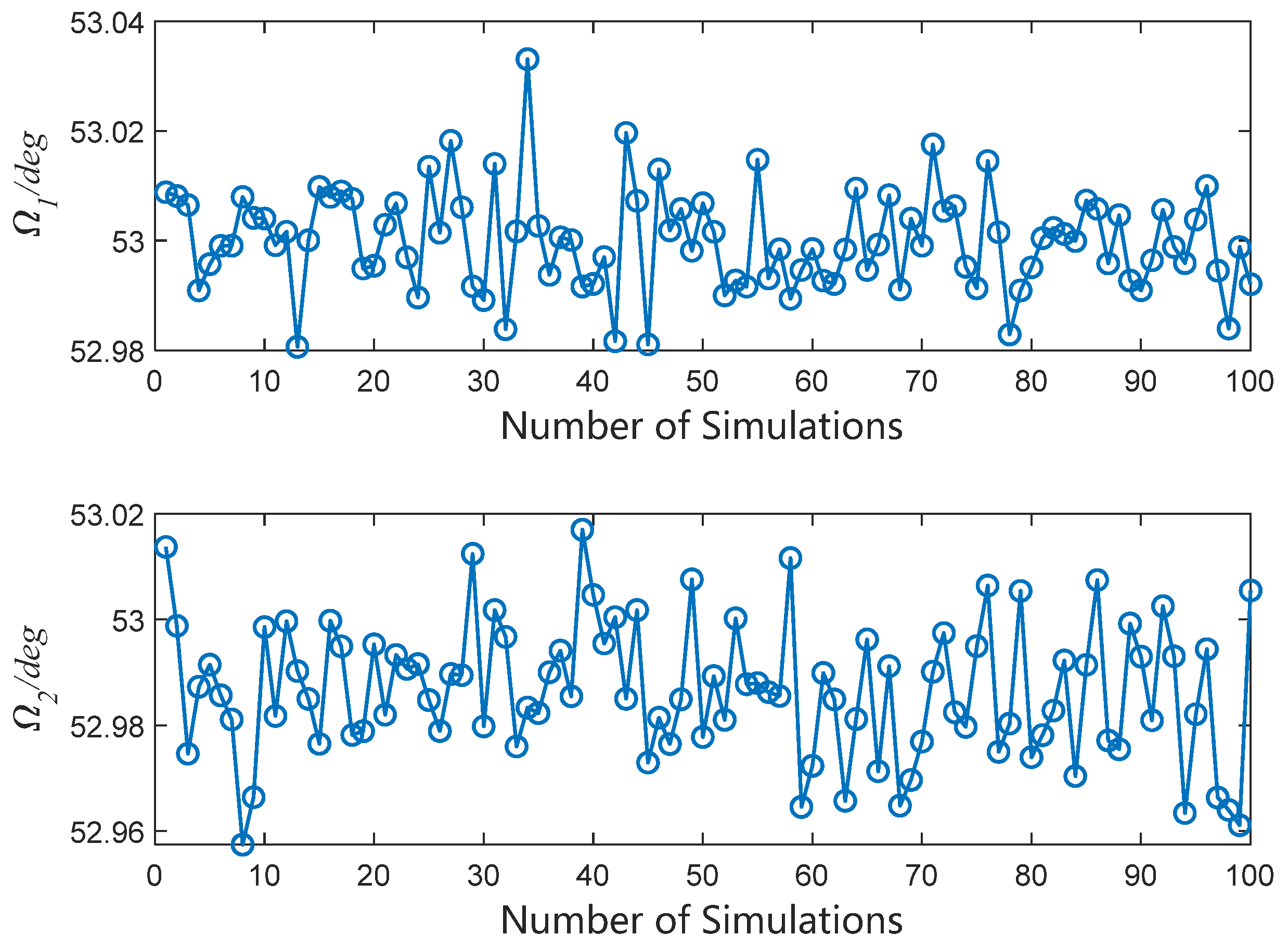
The two observations were each simulated 100 times. Each simulation imposes a different random observation error using the single-arc segment orbit determination method described in
Section 3 to obtain the RAAN of the two arcs noted as
,
. The results are shown in
Figure 18.
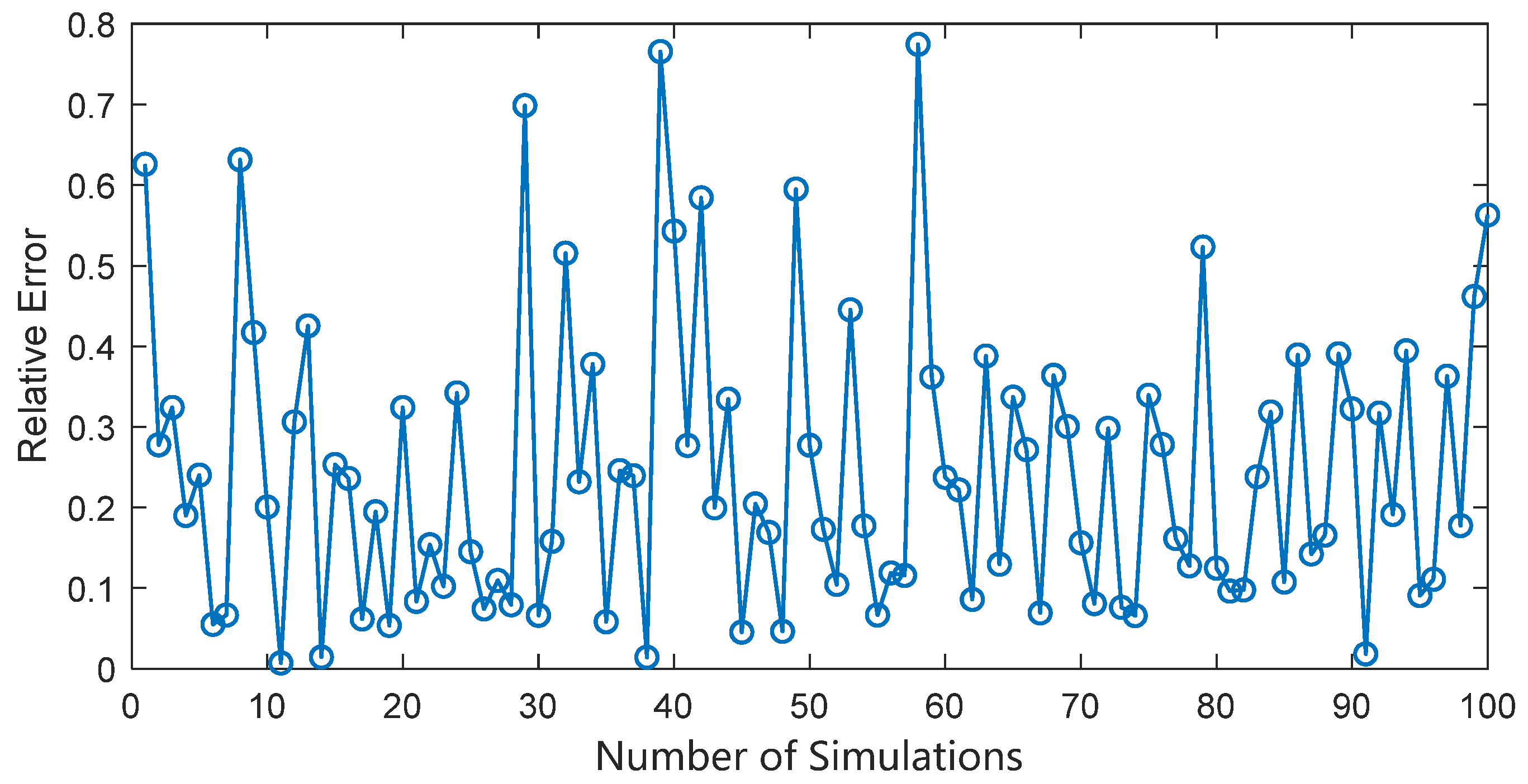
According to Equation (30), the normal acceleration is solved inversely by
and
. The results are shown in
Figure 19. The relative error in normal acceleration is shown in
Figure 20. It can be seen that solving for the normal acceleration based on two arcs separated by 23 h gives an average relative error of 30.21%.
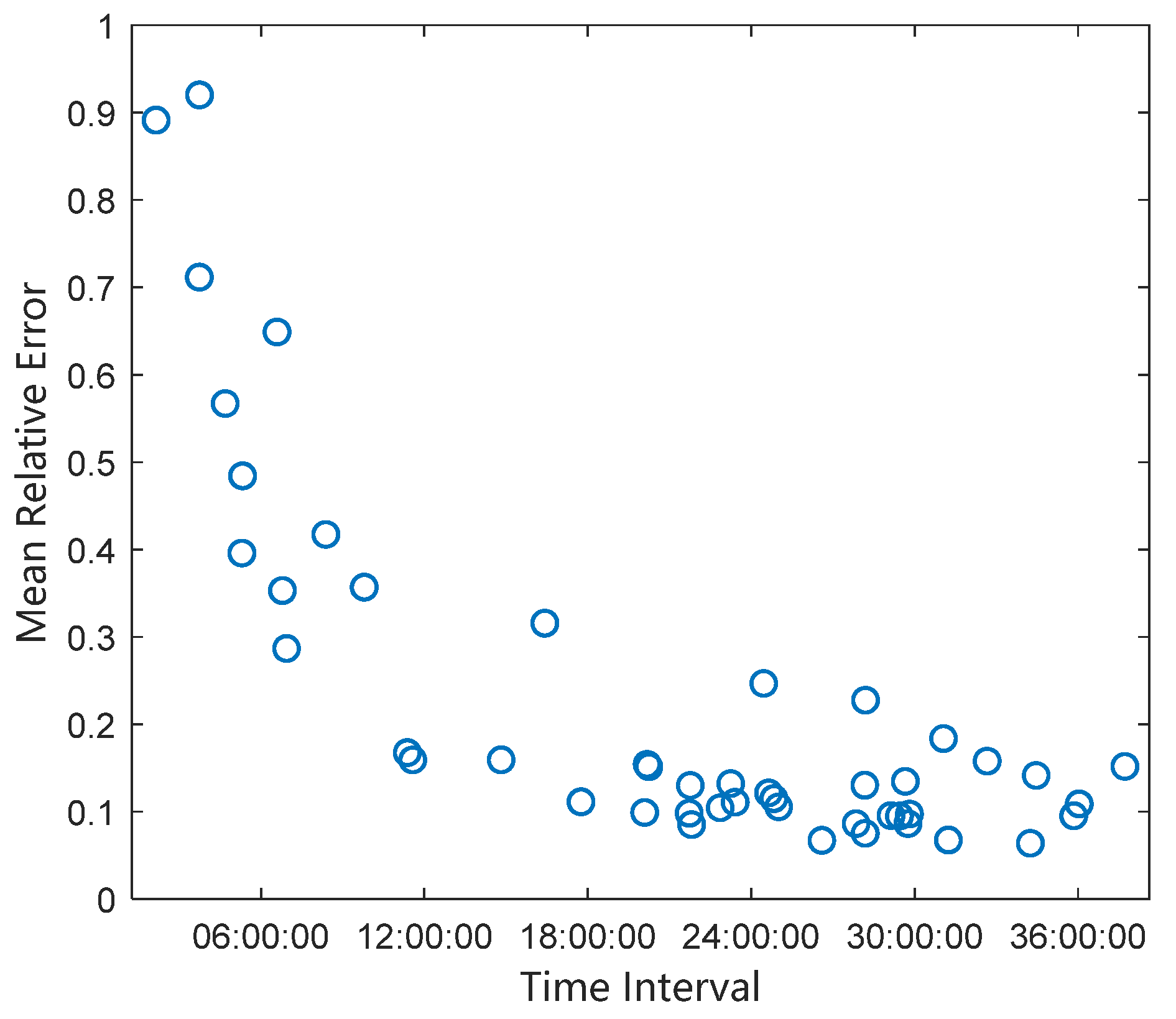
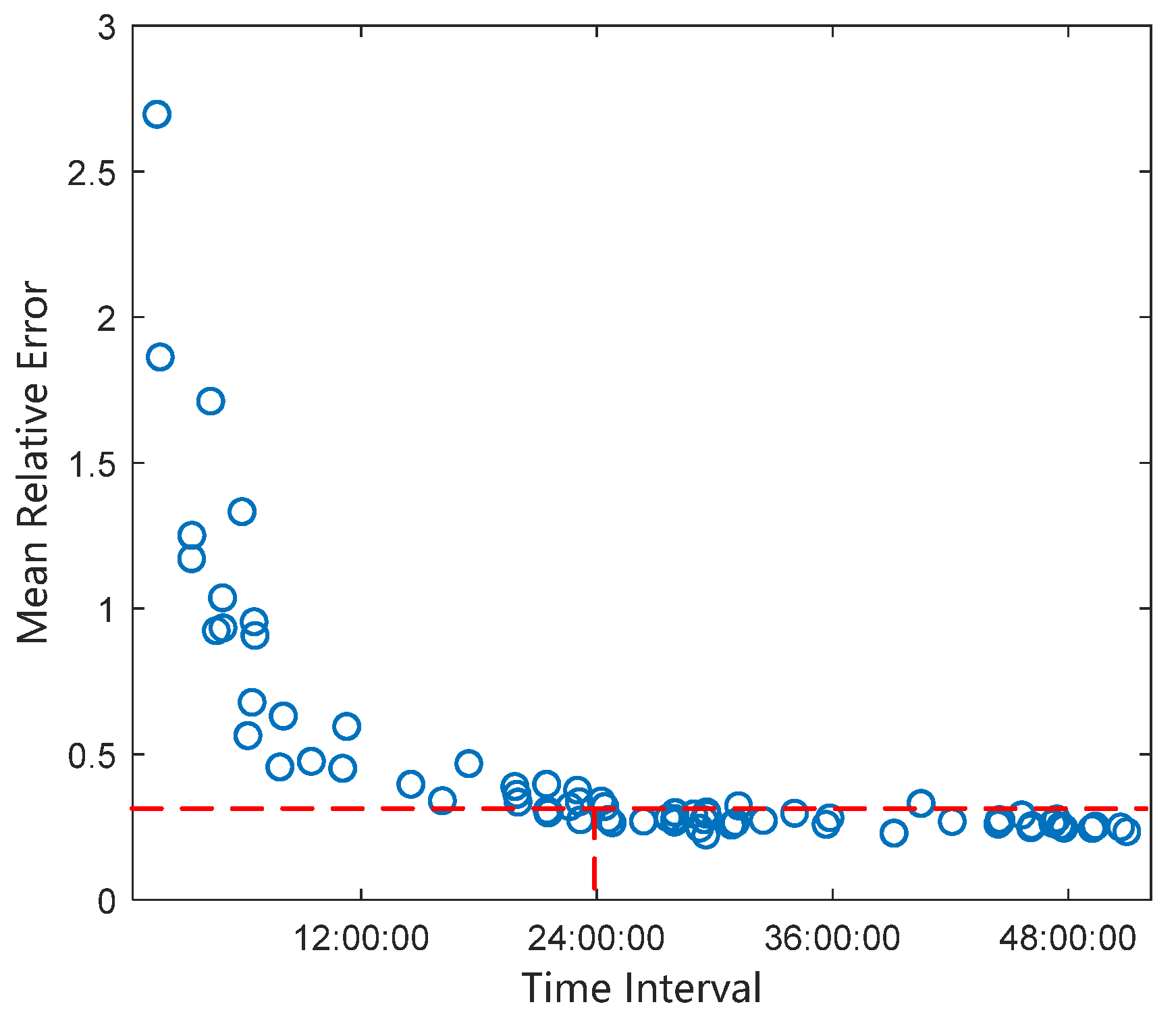
The normal acceleration and its average relative error are calculated separately from radar observation arcs at different time intervals. The relative error of the normal acceleration versus the observation interval is shown in
Figure 21. The observation angle error of the radar equipment is large, so the relative error will also be larger compared to the tangential acceleration determined via orbit determination using radar observation data and inverting the normal acceleration. The average relative measurement error of normal acceleration is about 20% when the interval between observations is 24 h.
Depending on the mission requirements, the smaller the normal acceleration, the smaller the rate of change of orbital inclination and RAAN. When the continuous normal acceleration is reduced to 1.4 × 10
−4 m/s
2, the average relative measurement error of the normal acceleration can only be about 35% when the time interval between two observations is 24 h. This is shown in
Figure 22.
6.4. The Relationship Between Orbit Determination Accuracy and Measurement Accuracy
The measurement data obtained by the radar measurement equipment are the azimuth angle A, elevation angle E, and range ρ. There are many factors that affect measurement accuracy, among which atmospheric disturbances and irregularities in the ionosphere are important factors.
Atmospheric refraction causes radio waves to bend, resulting in the apparent distance and elevation angle measured by radar differing from the actual distance and elevation angle. To address the errors in radar ranging and angle measurement caused by atmospheric refraction, researchers have focused their efforts on two main areas: first, studying how to obtain atmospheric refraction indices that more closely match actual conditions [
19,
20]; second, proposing more accurate and efficient models and correction methods for radio wave refraction errors [
21,
22].
The accuracy of measurement data affects the accuracy of precise orbit determination and thrust parameter estimation. Taking the pre-identification process of tangential thrust parameters as an example, we will analyze the impact of angular measurement and range measurement accuracy on the accuracy of thrust parameter pre-identification.
6.4.1. The Effect of Angle Measurement Accuracy on Orbit Determination Accuracy
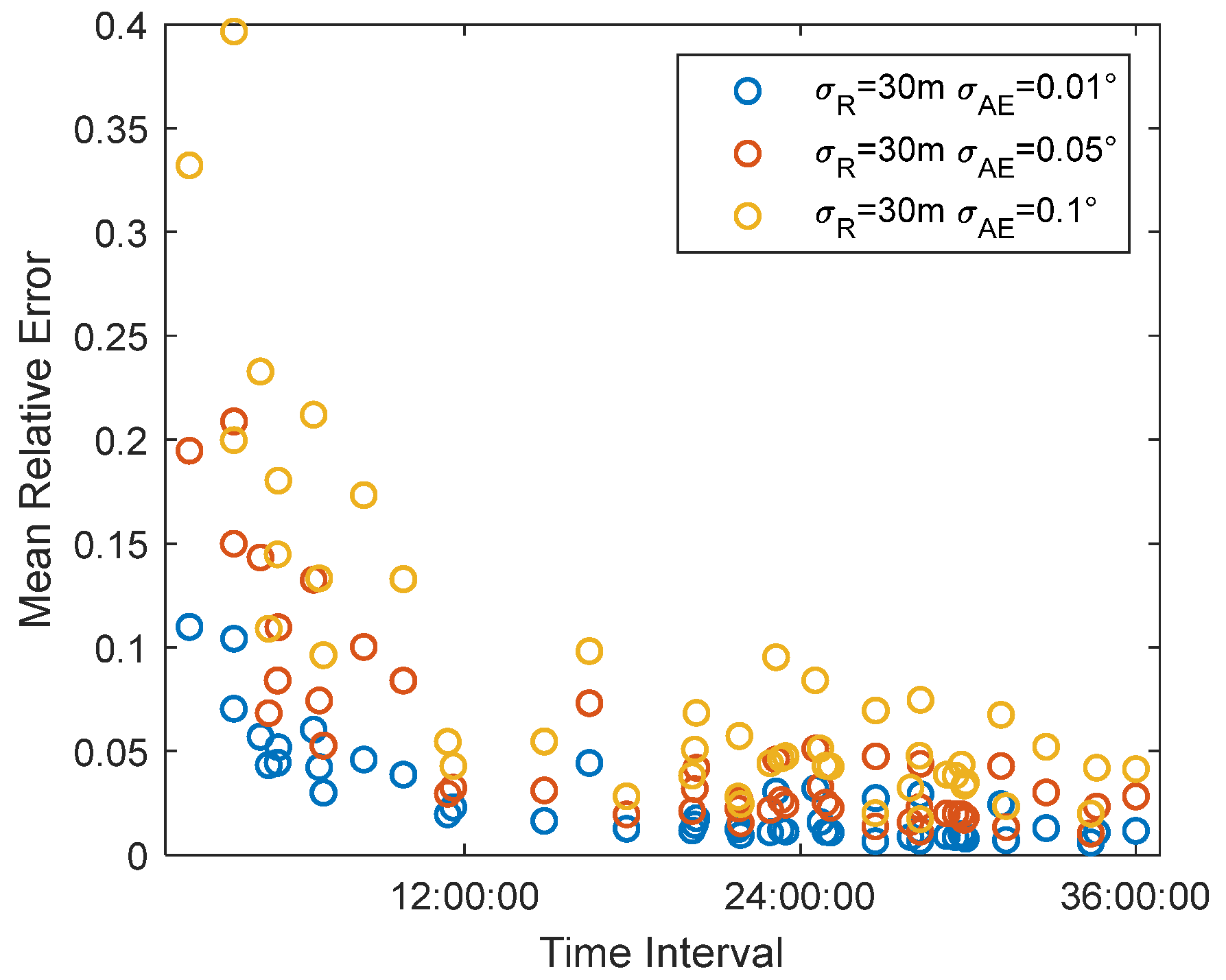
When the range measurement accuracy is 30 m, the angle measurement accuracy is set to 0.01°, 0.05°, and 0.1°. The relationship between the thrust parameter pre-identification accuracy and the time span is shown in the
Figure 23.
As the angular measurement accuracy decreases, the average relative error of the thrust parameter pre-identification also decreases. When the angular measurement accuracy is 0.01°, a 5% solution error can be achieved within 4 h; when the angular measurement accuracy is 0.05°, a 5% solution error can be achieved within 8 h; when the angular measurement accuracy is 0.1°, a 5% solution error can be achieved within 12 h.
6.4.2. The Effect of Range Measurement Accuracy on Orbit Determination Accuracy
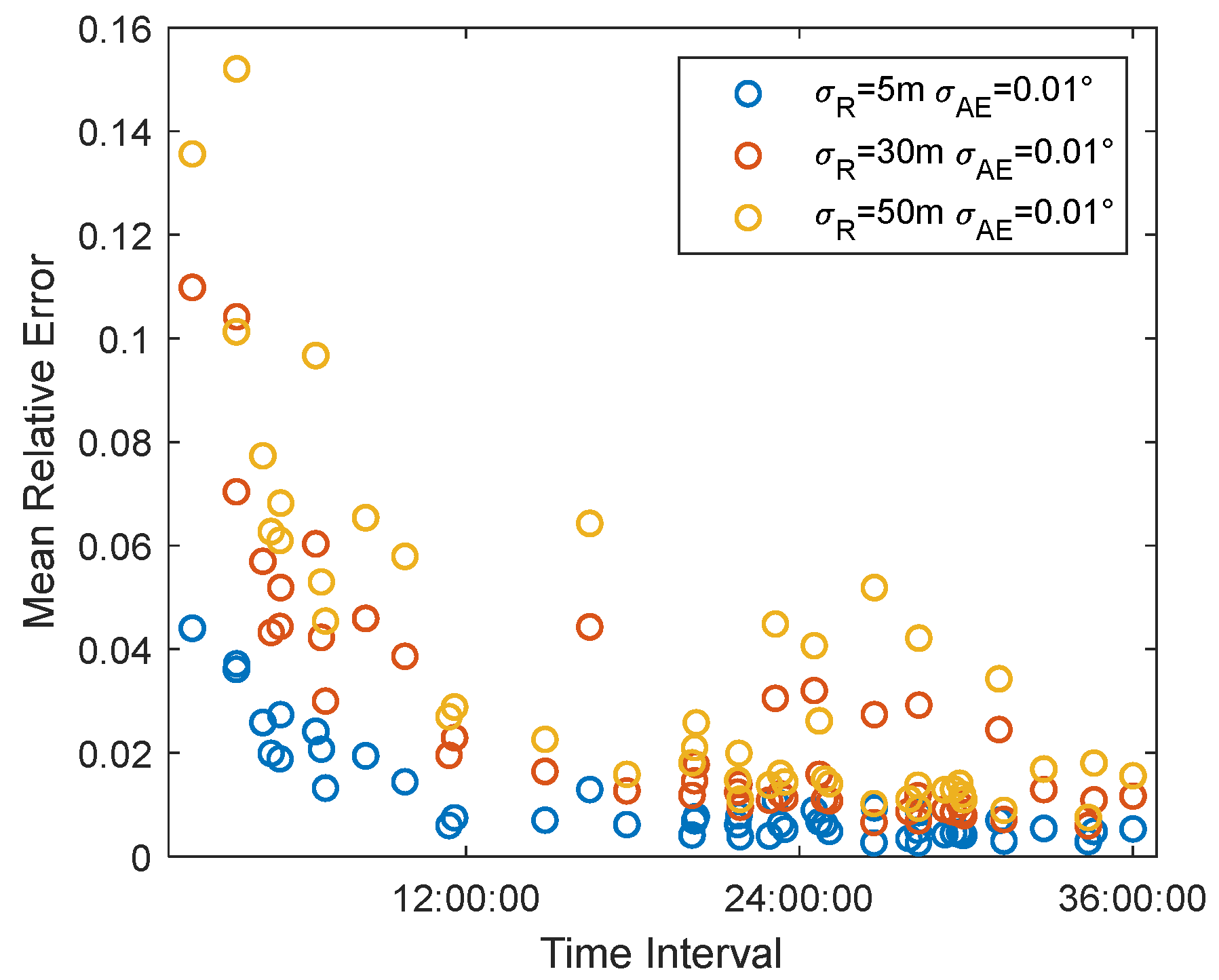
When the angle measurement accuracy is 0.01°, the range measurement accuracy is set to 5 m, 30 m, and 50 m. The relationship between the thrust parameter pre-identification accuracy and the time span is shown in the
Figure 24.
As the ranging accuracy decreases, the average relative error of thrust parameter pre-identification also decreases. When the ranging accuracy is 5 m, a 5% solution error can be achieved within 2 h; when the ranging accuracy is 30 m, a 5% solution error can be achieved within 6 h; when the ranging accuracy is 50 m, a 5% solution error can be achieved within 8 h.
Both angular measurement and range measurement accuracy affect the accuracy of thrust parameter pre-identification, and the degree of impact is basically the same. When angular measurement or range measurement accuracy decreases by a factor of 10, the average relative error of thrust parameter pre-identification increases by about 8 times.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}