
Drag Reduction and Efficiency Enhancement in Wide-Range Electric Submersible Centrifugal Pumps via Bio-Inspired Non-Smooth Surfaces: A Combined Numerical and Experimental Study

Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
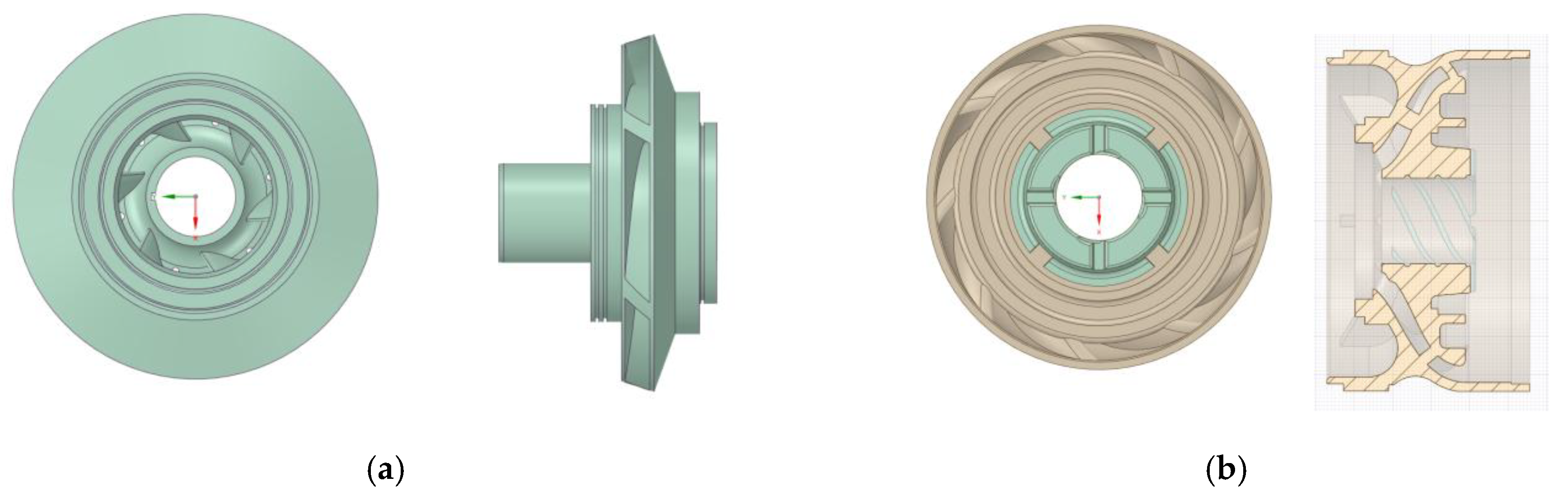
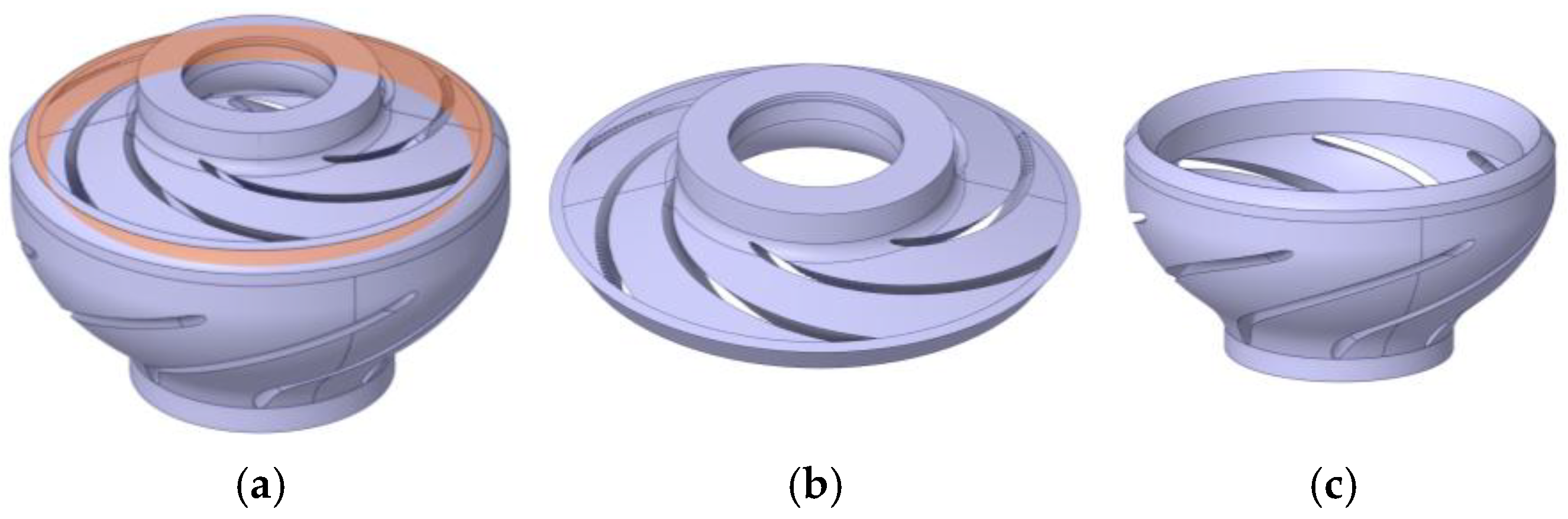
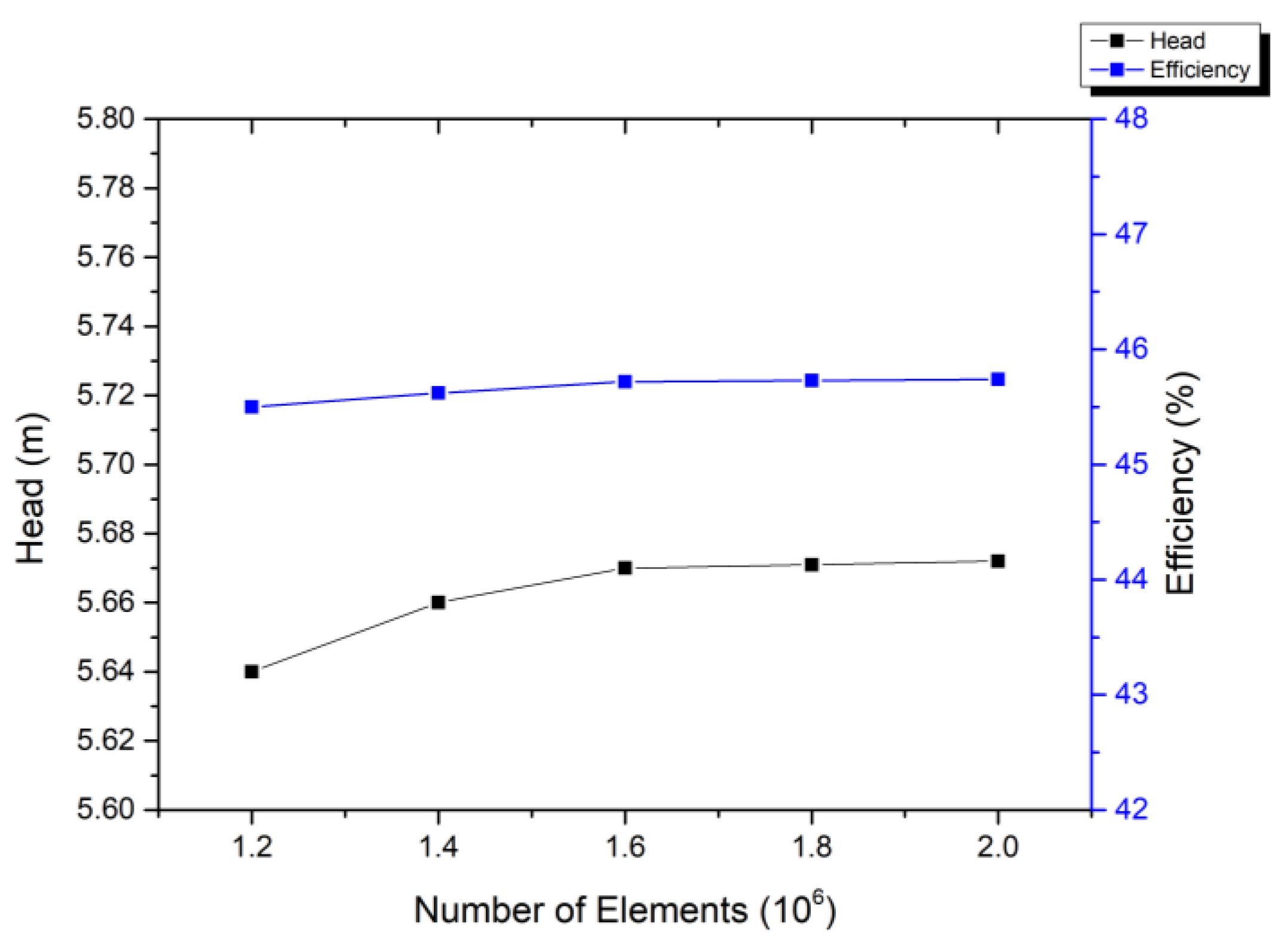
2.1. Numerical Model
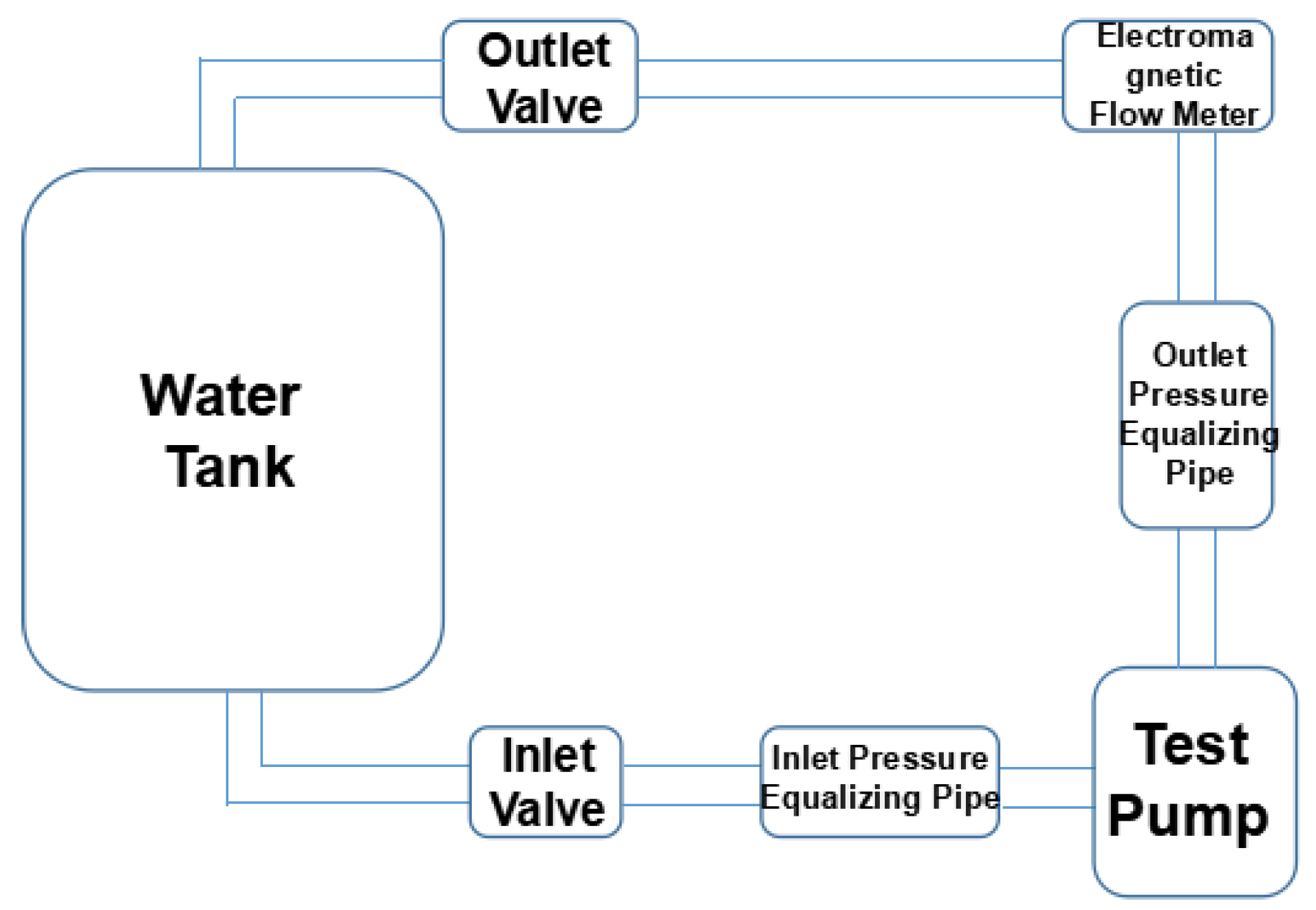
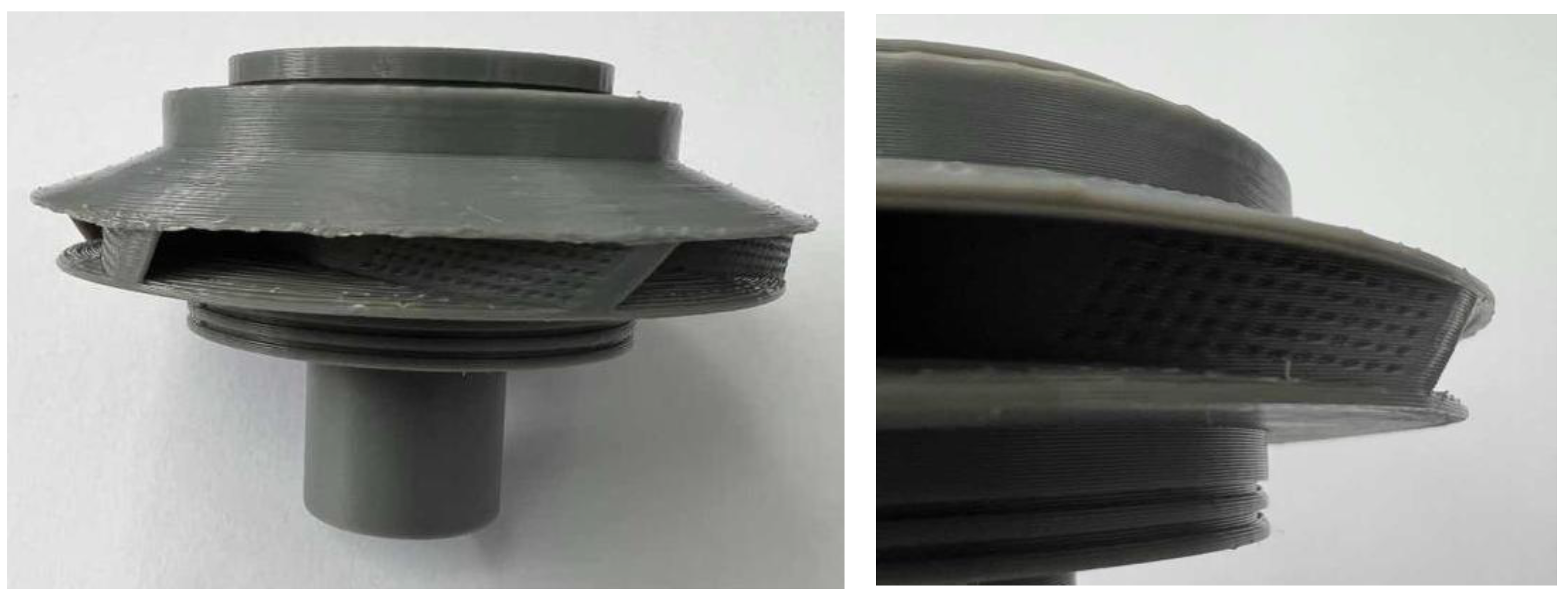
2.2. Experimental System
- Flow measurement: Electromagnetic flowmeter (accuracy: 0.5% FS).
- Pressure measurement: Two dynamic pressure sensors (range: 0–1 MPa, accuracy: 0.1%) installed at both the inlet and outlet.
- Speed monitoring: Optical encoder (resolution: 0.1°).
3. Results
3.1. Simulation
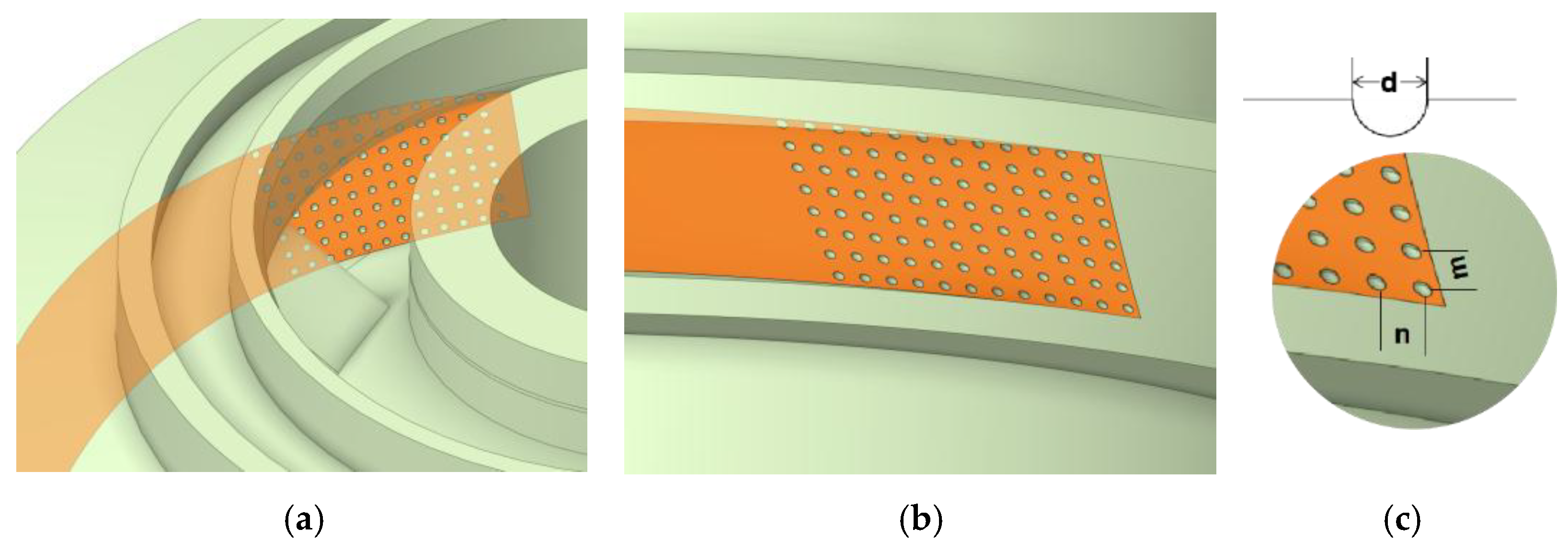
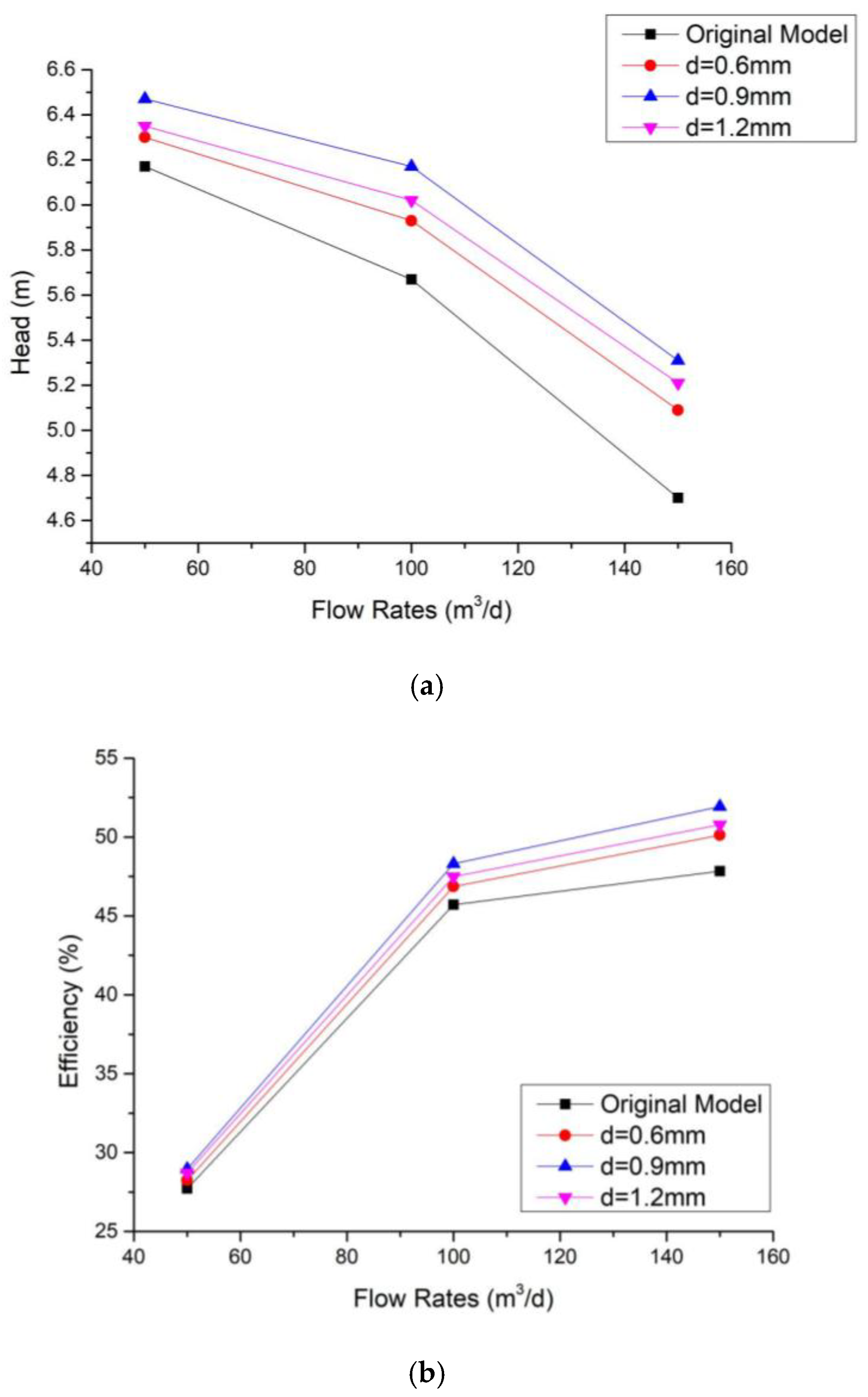
3.1.1. Design of Non-Smooth Structure Parameters
- Flow-Dependent Head Enhancement: Maximum head gain of 12.98% occurred at 150 m3/d, representing a 515% increase compared to the 2.11% improvement at 50 m3/d.
- Consistent Efficiency Trends: Efficiency gains mirrored head improvements, with 8.55% enhancement at 150 m3/d versus 1.88% at 50 m3/d.
- Nonlinear Size-Performance Relationship: The d = 0.9 mm configuration achieved synchronized optimization at 150 m3/d, delivering 12.98% head gain and 8.55% efficiency improvement over the baseline, validating the engineering applicability of the theoretical optimal diameter.
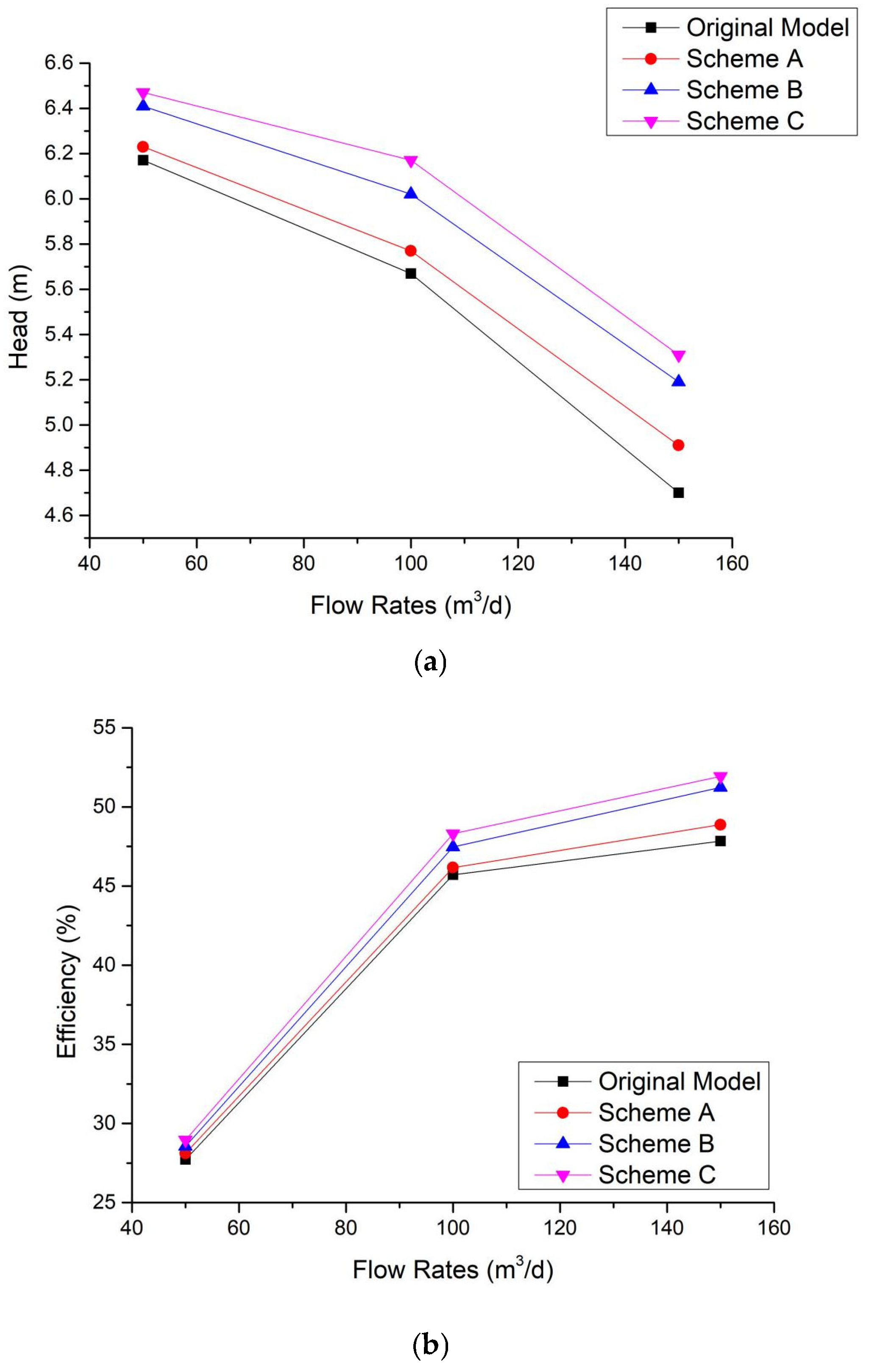
3.1.2. Simulation Analysis of Non-Smooth Structure Arrangement
- Performance Degradation in Scheme B: At 150 m3/d, Scheme B achieved only a 4.47% head gain, representing a 65.56% reduction compared to Scheme A (12.98%).
- Marginal Benefits of Dual-Region Optimization: Scheme C provided merely a 2.55-percentage-point head improvement over Scheme A, with efficiency gain differences below 1.5%.
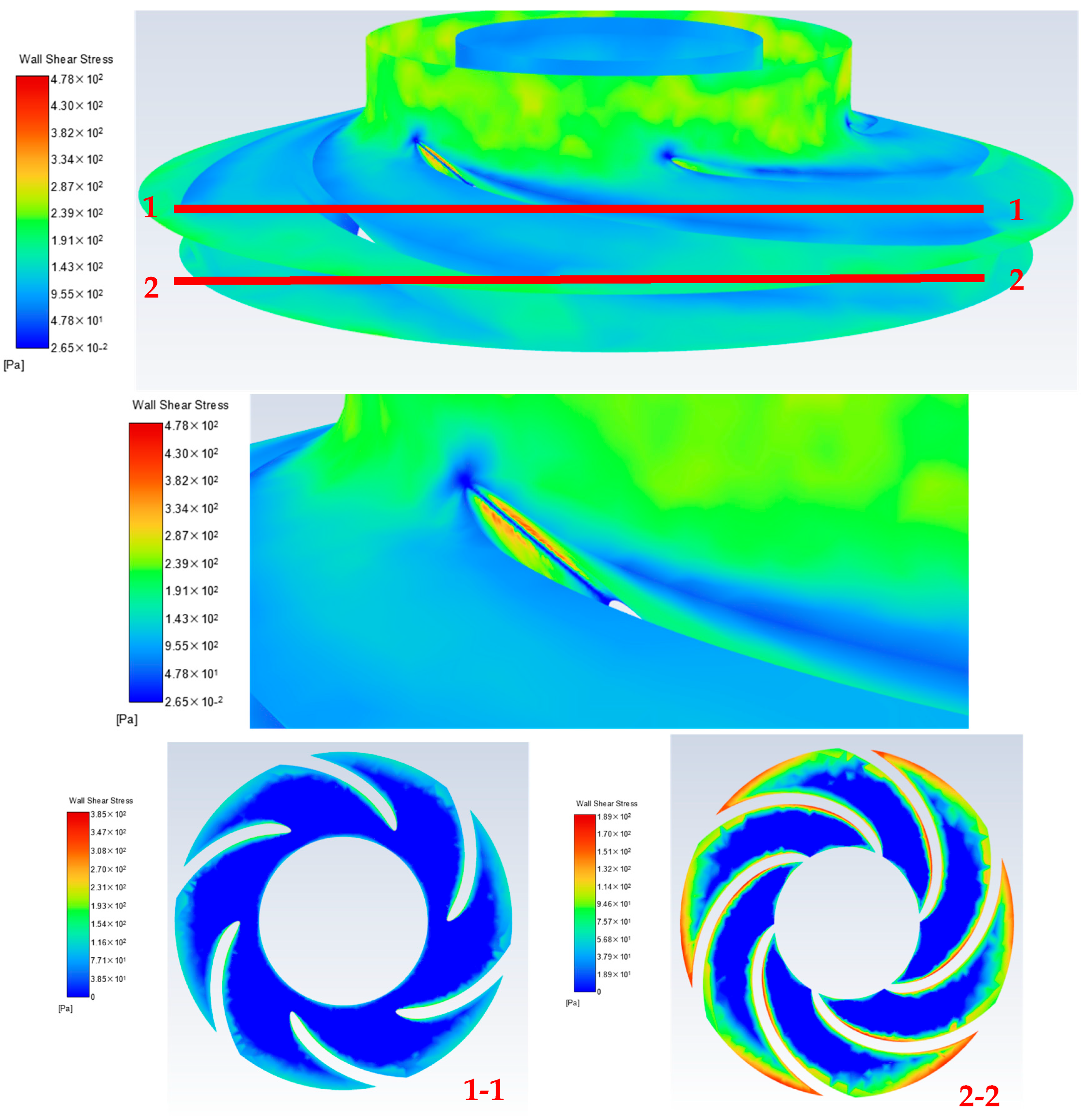
- Dominant Role of Pressure Surface Trailing Edge: Dimples on the pressure surface trailing edge exhibited superior contributions to both head and efficiency enhancements.
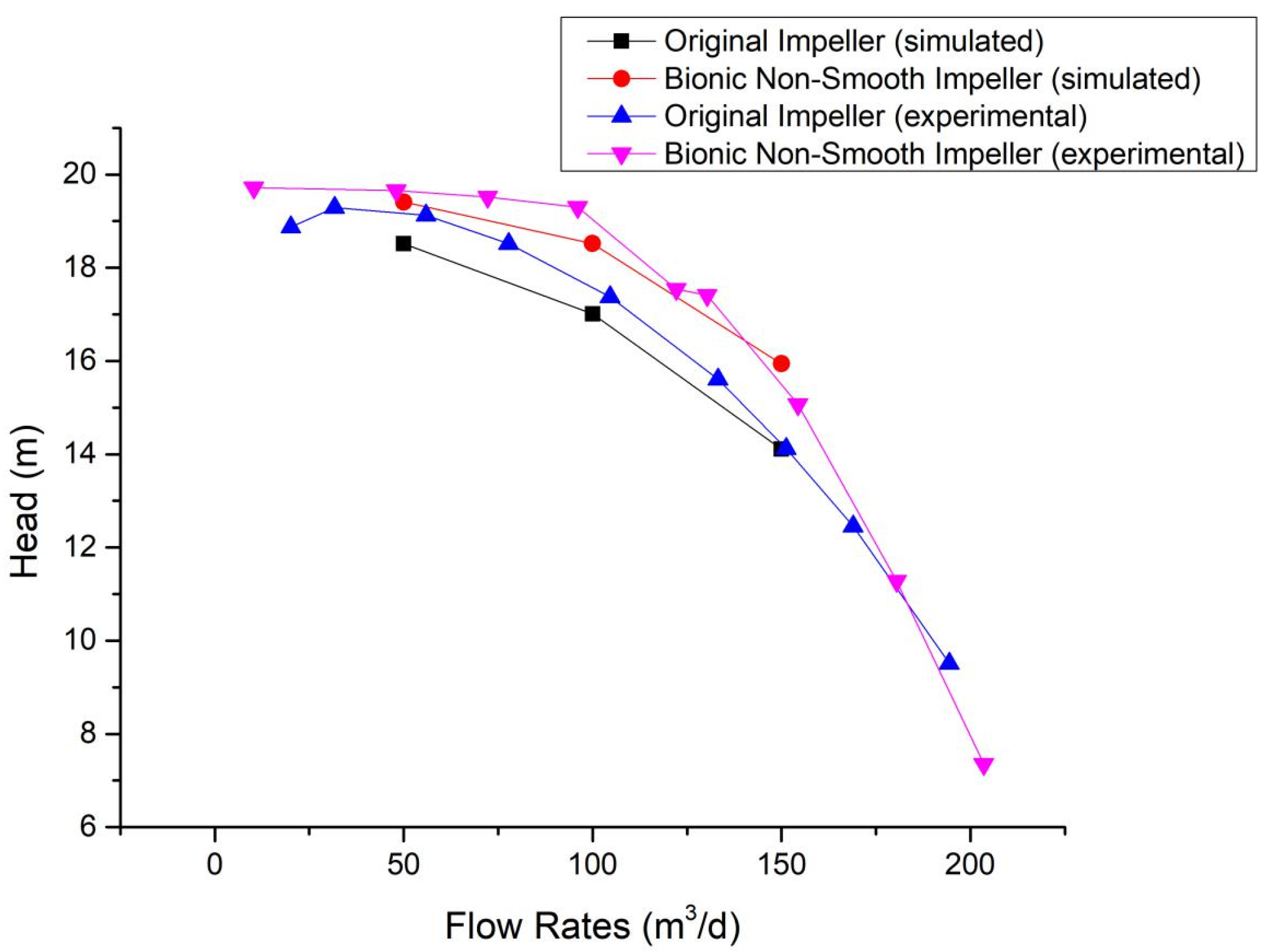
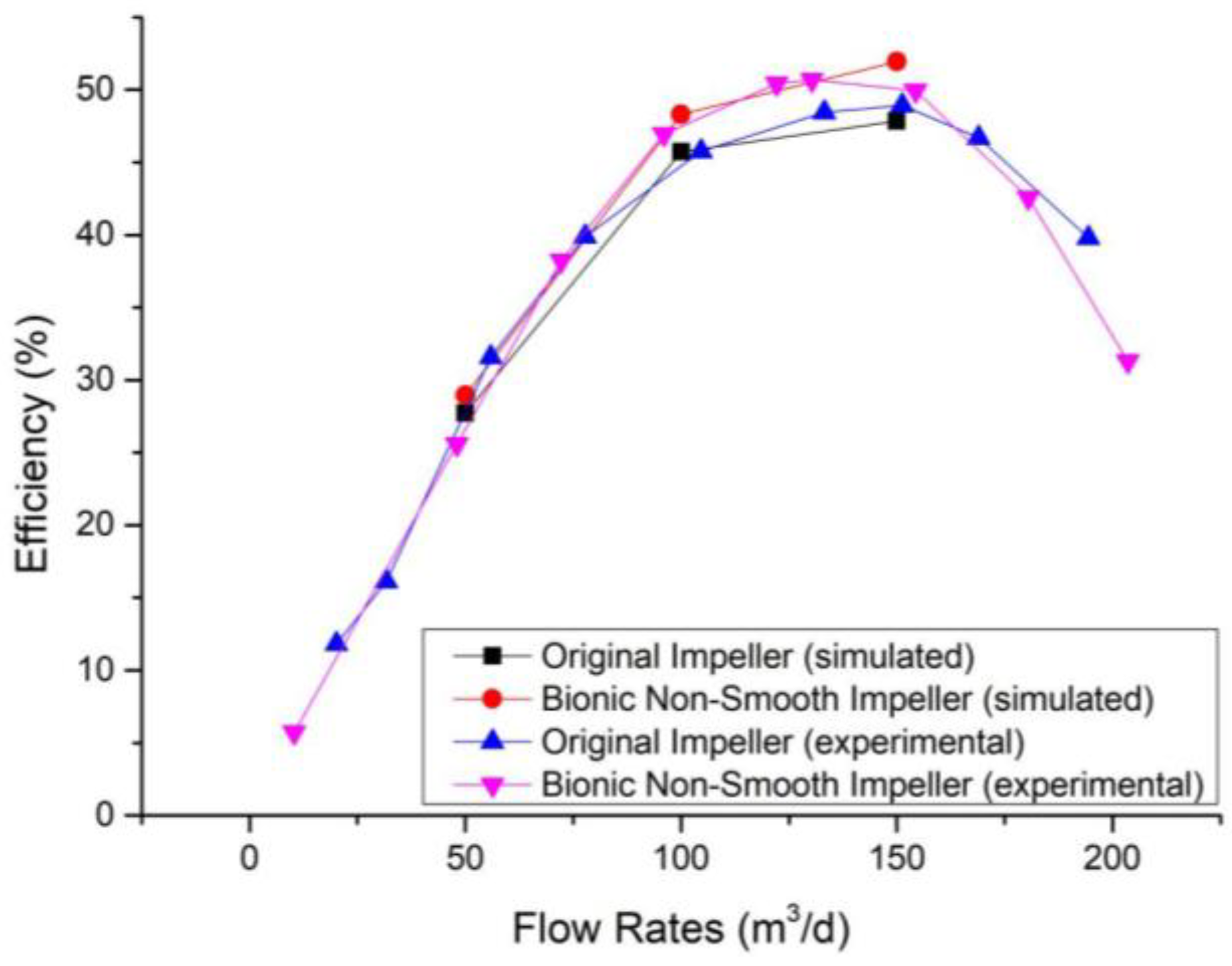
3.2. Experiment
4. Discussion
- Simplification of anisotropic wall roughness modeling: Actual pump wall roughness exhibits anisotropy, whereas simulations adopt an isotropic model. This simplification underestimates turbulent dissipation, leading to inaccurate boundary layer predictions. At low flow rates, boundary layer separation exhibits heightened sensitivity to roughness anisotropy; neglecting this effect results in underestimated frictional losses and consequently overpredicted efficiency. Furthermore, the isotropic assumption causes overpredicted head at high flow rates (where actual head is lower due to greater frictional losses), despite enhanced hydrodynamic influence of the bionic non-smooth surfaces.
- Microstructural defects in 3D-printed components: Layer lines, pores, and other printing-induced defects increase surface roughness and induce unintended vortices, reducing actual efficiency. This effect is particularly pronounced for bionic non-smooth impellers: the 0.9 mm radius of dimple structures approaches the ±0.15 mm printing tolerance, rendering experimental specimens highly susceptible to surface defects that persistently reduce efficiency below simulated values.
- Random deviations from flowmeter/pressure sensor calibration errors and mechanical vibrations.
- Wear Resistance Evaluation: Investigating material coatings or hybrid surface textures to enhance durability in abrasive environments.
- Multi-Objective Optimization: Integrating machine learning with CFD to explore synergistic effects of dimple parameters (depth, spacing, distribution) and alternative bio-inspired geometries (e.g., riblets, hierarchical structures).
- Field-Scale Validation: Testing optimized impellers in real-world offshore conditions to assess performance under variable oil–water ratios, gas ingress, and thermal stresses.
5. Conclusions
- (1)
- The dimpled non-smooth structure effectively suppresses boundary layer separation near the impeller wall and reduces viscous friction losses. Numerical simulations indicate that the optimized impeller (dimple diameter d = 0.9 mm) achieves 12.98% and 8.55% improvements in head and efficiency, respectively, compared to the baseline impeller at 150 m3/d. Experimental validation confirms an 11.5% head gain and a 4.6-percentage-point peak efficiency enhancement at 130 m3/d.
- (2)
- Dimple diameter exhibits a nonlinear correlation with performance gains, with d = 0.9 mm yielding optimal overall performance. The structural arrangement significantly impacts drag reduction, where dimple arrays on the trailing edge of the pressure side maximize efficiency by regulating shear layer instability.
- (3)
- Experimental and simulated head-flow curves align in trend, but experimental head values are systematically 1.2–2.8% higher, with a 4% efficiency deviation at 150 m3/d. These systematic errors arise from the combined effects of anisotropic wall roughness, multiphase flow interface slip, and additive manufacturing micro-defects.
- (4)
- The single-region optimization strategy (dimples on the pressure side trailing edge) achieves over 90% of the total performance improvement while maintaining high manufacturability, offering a practical solution for dynamic adaptability of wide-range pumps and intelligent well completion technologies.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ESP | Electrical submersible pumps |
| CFD | Computational fluid dynamics |
| MRF | Multiple reference frame |
References
- Li, Y.; Bai, J.; Yu, F.; Shang, B.; Jiang, Z.; Du, D. Research and Application of Wide-Range Electrical Submersible Pump Lifting Technology in Bohai Oilfield. J. Chengde Pet. College 2023, 25, 20–26+36. [Google Scholar] [CrossRef]
- Li, H.; Wang, Q.; Jiang, Z.; Yu, F.; Hou, X.; Yu, X. Research and Application of Permanent Magnet Motor-Driven Electrical Submersible Pump Technology in Bohai Oilfield. China Pet. Chem. Stand. Qual. 2023, 43, 193–195. [Google Scholar]
- Cheng, S. Analysis of Efficiency Optimization and Energy Saving for Centrifugal Pump Impellers. China Plant Eng. 2021, 13, 148–149. [Google Scholar]
- Zhang, J. Operation and Common Issue Mitigation of Centrifugal Pumps in Oilfield Production. China Sci. Technol. J. Database (Ind. A) 2022, 1, 43–46. [Google Scholar]
- Saputra, M.N.; Rahmanto, B.A.; Anggaraini, H.; Ryanta, A. Enhancing Reliability and Emissions Reduction: The Impact of Compact Wide Range Electrical Submersible Pumps. In Proceedings of the International Petroleum Technology Conference, Kuala Lumpur, Malaysia, 18–20 February 2025. [Google Scholar] [CrossRef]
- Shuber, H.; Al-Watyan, A.; Alaryan, A.; Kishore, K.; Aparicio, C.; Yadavalli, S.; Cai, H.B. Success Story: Selective Completion Combined with Wide-Range ESP in KOC. In Proceedings of the ADIPEC, Abu Dhabi, United Arab Emirates, 2–5 October 2023. [Google Scholar] [CrossRef]
- Niu, C.; Gan, Q.; Zheng, T.; Zhang, L.; Li, B.; Wei, W.; Yang, H. Application Analysis of Wide-Range Electrical Submersible Pump Lifting Technology in Tight Oil Horizontal Wells. Oil Field Equip. 2021, 50, 69–74. [Google Scholar]
- Leon, F.I.; Alvear, J.L.; Naranjo, R.R.; Vela, N.A.; Amores, D.A.; Perez, M.A.; Pancho, J.G.; Aguirre, L.X.; Sierra, O.G.; Villalobos, J.L.; et al. Comparative Study of the World’s First Deployment of a Compact Wide-Range ESP System with Induction Motor at MDC Field, Ecuador. In Proceedings of the ADIPEC, Abu Dhabi, United Arab Emirates, 4–7 November 2024. [Google Scholar] [CrossRef]
- Pasaribu, R.; Purba, M.O.; Anggaraini, H.; Alkahfi, S.; Fatichin, F.; Rahmanto, B.; Junaidy, I.; Andri, F.; Abadi, F. The Success Story of ESP Advanced Technology Application to Address the Risk of Well Inflow Capability Uncertainty Using a Wide Range and Abrasive-Resistant ESP in the B and K Fields. In Proceedings of the SPE Middle East Artificial Lift Conference and Exhibition, Manama, Bahrain, 29–30 October 2024. [Google Scholar] [CrossRef]
- Wei, M.; Che, C.; Gong, J.; Sun, J.; Qi, L. Structural Design and Internal Flow Field Analysis of Wide-Range Electrical Submersible Pumps. Pump Technol. 2023, 5, 11–15. [Google Scholar]
- Li, Y.; Bai, J.; Jiang, Z.; Yu, F.; Shang, B. Design and Performance Testing of Wide-Range Electrical Submersible Pump Impeller-Diffuser Assemblies. Oil Field Equip. 2020, 49, 66–73. [Google Scholar]
- Wang, Z.; Li, J.; Hou, D.; Qiao, Y.; Wu, M. Research and Application of Wide High-Efficiency Hydraulic Design Methods for Centrifugal Pumps. Energy Conserv. Technol. 2024, 42, 353–358. [Google Scholar]
- Dai, C.; Ge, Z.P.; Dong, L.; Liu, H.L. Drag and Noise Reduction Characteristics of Bionic Surfaces in Centrifugal Pumps. Journal of Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2020, 48, 113–118. [Google Scholar] [CrossRef]
- Wu, W.; Wang, G.; Zhou, Z.; Guan, L. Drag Reduction Performance of Bionic Non-Smooth Surfaces. Contemp. Chem. Ind. 2024, 53, 855–859. [Google Scholar] [CrossRef]
- Zhong, P.; Zhao, X.; Ni, W.; Yang, K. Design and Finite Element Analysis of Bionic Non-Smooth Surface Pipelines. Hydraul. Pneum. 2019, 7, 70–75. [Google Scholar]
- Wang, Z.; Chen, P.; Hu, O. Drag Reduction Technology for Helicopter Tail Cabin Doors Based on Non-Smooth Surfaces. J. Nanjing Univ. Aeronaut. Astronaut. 2020, 52, 240–246. [Google Scholar] [CrossRef]
- Zhu, H.; Zhang, Y.; Wu, P.; Shao, X. Boundary Layer Control-Based Drag Reduction Technology for High-Speed Trains. J. Traffic Transp. Eng. 2017, 17, 64–72. [Google Scholar]
- Huang, S. Application of Bionic Non-Smooth Theory in Oil and Gas Well Engineering. Petrochem. Ind. Technol. 2015, 8, 108. [Google Scholar]
- Shi, B.; Yang, Q.; Hao, Z.; Wei, S.; Fu, T. Bionic Surface Textured Stator for Deep/Ultra-Deep Well Oil Production Progressing Cavity Pump. In Proceedings of the APOGCE 2024, Perth, Australia, 15–17 October 2024. [Google Scholar] [CrossRef]
- Lin, X.C.; Hu, Y.H.; Li, Q.Y.; Wang, Y.; Chen, J. Impact of Bionic Micro-Dimple Surface Blades on Cavitation Performance of Centrifugal Pumps. Hydraul. Pneum. 2024, 48, 143–149. [Google Scholar]
- Gan, G.; Hu, Y.; Zhang, X.; Yuan, X.; Li, J.; Ning, T. Effect of Non-Smooth Surface Blades on Hydraulic Performance of Centrifugal Pumps. J. Mech. Electr. Eng. 2023, 40, 781–787. [Google Scholar]
- Mu, J.G.; Dai, D.S.; Gu, Y.Q.; Liu, J.; Zheng, S.H.; Wang, E. Flow Drag Reduction Characteristics of Non-Smooth Surface Centrifugal Pump Impellers. J. Shanghai Jiao Tong Univ. 2016, 50, 306–312. [Google Scholar] [CrossRef]
- Dai, D. Application of Non-Smooth Surface Flow Drag Reduction Characteristics in Centrifugal Pumps. Ph.D. Thesis, Zhejiang University of Technology, Hangzhou, China, 2015. [Google Scholar]
- Li, K. Research on Drag Reduction of Bionic Dimpled Impellers and Dynamic Characteristics of Centrifugal Pump Units. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Dai, C.; Chen, Y.; Dong, L.; Wang, Z. Optimal Placement of Bionic Non-Smooth Structures on Centrifugal Pump Blades. J. Drain. Irrig. Mach. Eng. 2020, 38, 241–247. [Google Scholar]
- Peng, Q.; Hu, H.; Wang, F.; Zhang, G. Drag Reduction Performance of Non-Smooth Pipeline Walls. Mech. Des. Manuf. 2017, 41, 126–129. [Google Scholar] [CrossRef]
- Chen, Q. Unsteady Flow and Cavitation Characteristics of Centrifugal Pumps Under Low-Flow Conditions. Ph.D. Thesis, Shandong University of Science and Technology, Qingdao, China, 2022. [Google Scholar] [CrossRef]
- Choi, H.G.; Yoo, J.Y. A Hybrid Numerical Method for Navier-Stokes Equations Based on SIMPLE Algorithm. Numer. Heat. Transf. Part B Fundam. 1995, 28, 155–170. [Google Scholar] [CrossRef]
- Wang, W.; Tang, T.; Lu, S.P. Cavitation Suppression by Grooves on Suction Surface of Hydrofoils. Trans. Chin. Soc. Agric. Eng. 2019, 35, 40–47. [Google Scholar]
- EN ISO 5198:1998; Centrifugal, Mixed Flow and Axial Pumps-Hydraulic Performance Acceptance Tests-Precision Class. ISO: Geneva, Switzerland, 1998.
- Tavares, J.A.; Aldakhil, D.A. The Utilization of 3D Printing in O&G Applications. In Proceedings of the International Petroleum Technology Conference, Dhahran, Saudi Arabia, 12–14 February 2024. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Parameter | Value |
|---|---|---|
| Fluid properties | Oil–water ratio | 1:9 (volumetric) |
| Oil density | 850 kg/m3 | |
| Water density | 998 kg/m3 | |
| Dynamic viscosity | 0.001 Pa·s | |
| Boundary conditions | Inlet velocity | 50−150 m3/d |
| Rotational speed | 3500 rpm | |
| Boundary conditions | Velocity inlet, pressure outlet | |
| Numerical settings | Turbulence model | Standard k-ω |
| Near-wall treatment | Enhanced Wall Function | |
| Convergence | Residuals < 10−5 |
| Flow Rate (m3/d) | Head Deviation (%) | Efficiency Deviation (%) | ||
|---|---|---|---|---|
| Original Impeller | Bionic Non-Smooth Impeller | Original Impeller | Bionic Non-Smooth Impeller | |
| 50 | 3.30 | 1.24 | 13.92 | −11.64 |
| 100 | 2.12 | 4.27 | 0.07 | −2.82 |
| 150 | 0.07 | −5.46 | 2.24 | −3.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, T.; Wei, S.; Gao, Y.; Shi, B. Drag Reduction and Efficiency Enhancement in Wide-Range Electric Submersible Centrifugal Pumps via Bio-Inspired Non-Smooth Surfaces: A Combined Numerical and Experimental Study. Appl. Sci. 2025, 15, 7989. https://doi.org/10.3390/app15147989
Fu T, Wei S, Gao Y, Shi B. Drag Reduction and Efficiency Enhancement in Wide-Range Electric Submersible Centrifugal Pumps via Bio-Inspired Non-Smooth Surfaces: A Combined Numerical and Experimental Study. Applied Sciences. 2025; 15(14):7989. https://doi.org/10.3390/app15147989
Chicago/Turabian StyleFu, Tao, Songbo Wei, Yang Gao, and Bairu Shi. 2025. "Drag Reduction and Efficiency Enhancement in Wide-Range Electric Submersible Centrifugal Pumps via Bio-Inspired Non-Smooth Surfaces: A Combined Numerical and Experimental Study" Applied Sciences 15, no. 14: 7989. https://doi.org/10.3390/app15147989
APA StyleFu, T., Wei, S., Gao, Y., & Shi, B. (2025). Drag Reduction and Efficiency Enhancement in Wide-Range Electric Submersible Centrifugal Pumps via Bio-Inspired Non-Smooth Surfaces: A Combined Numerical and Experimental Study. Applied Sciences, 15(14), 7989. https://doi.org/10.3390/app15147989