Fast and Highly Accurate Zonal Wavefront Reconstruction from Multi-Directional Slope and Curvature Information Using Subregion Cancelation


Abstract
1. Introduction
2. Principle of the Proposed Algorithm and Analysis of Its Residual Errors
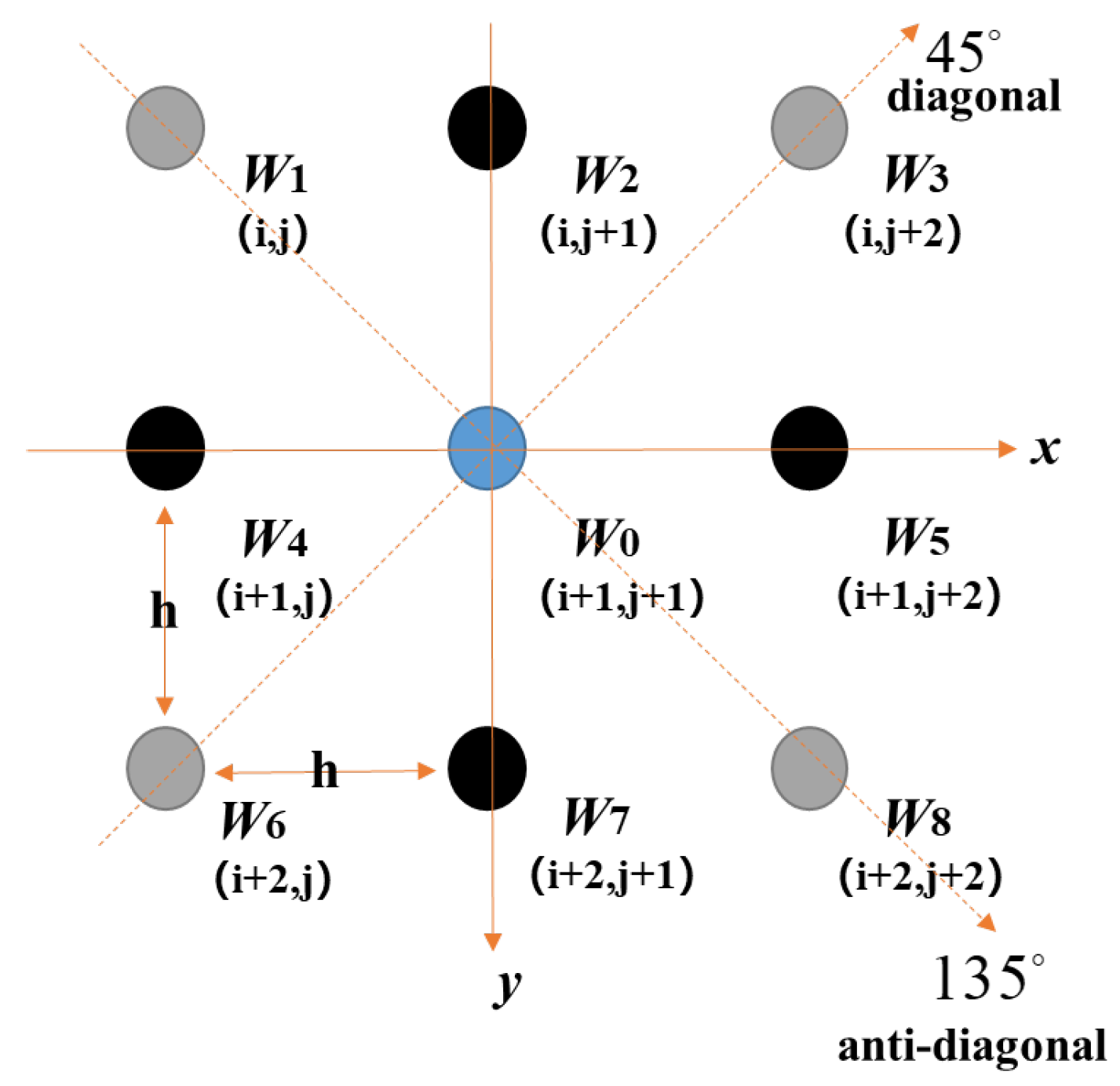
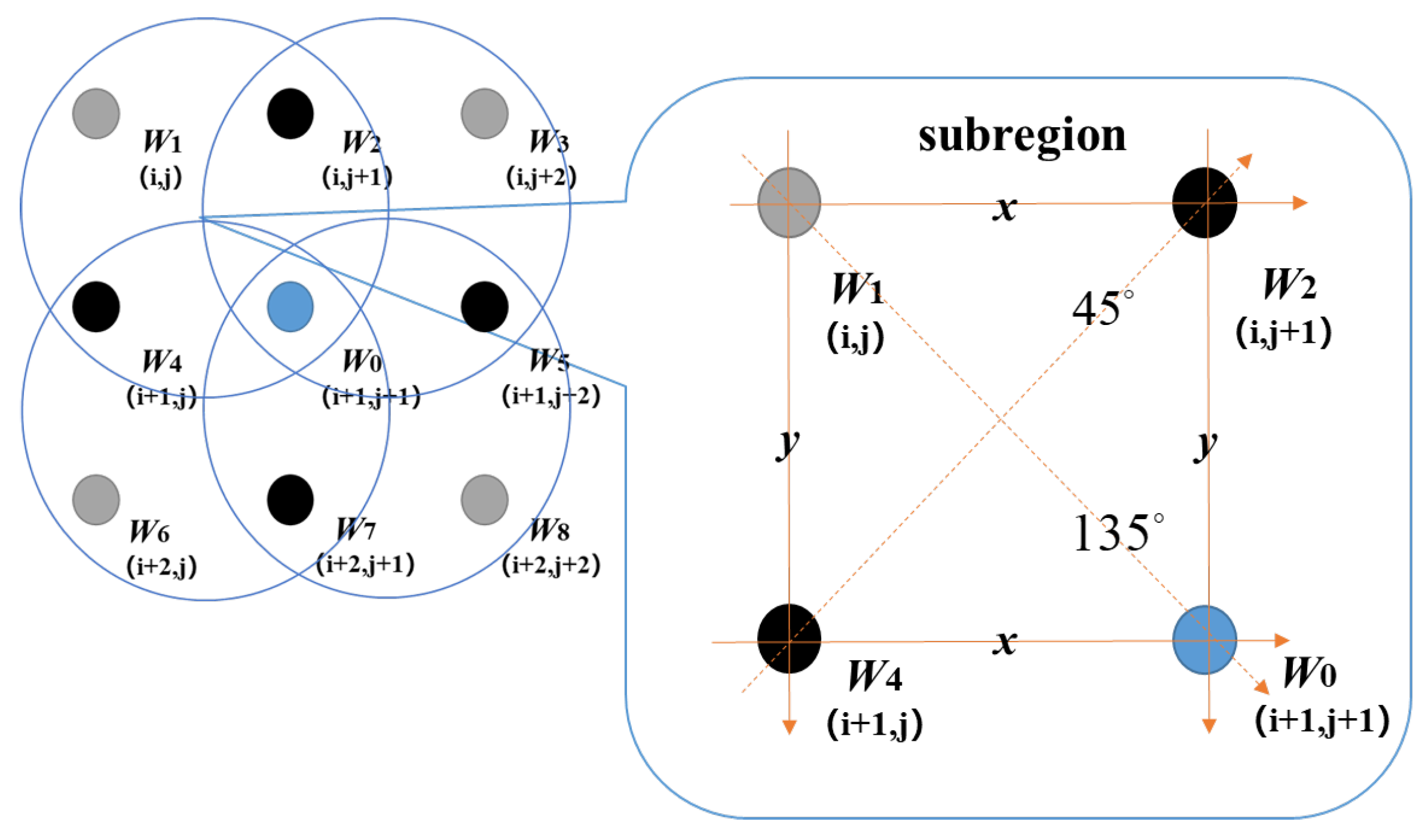
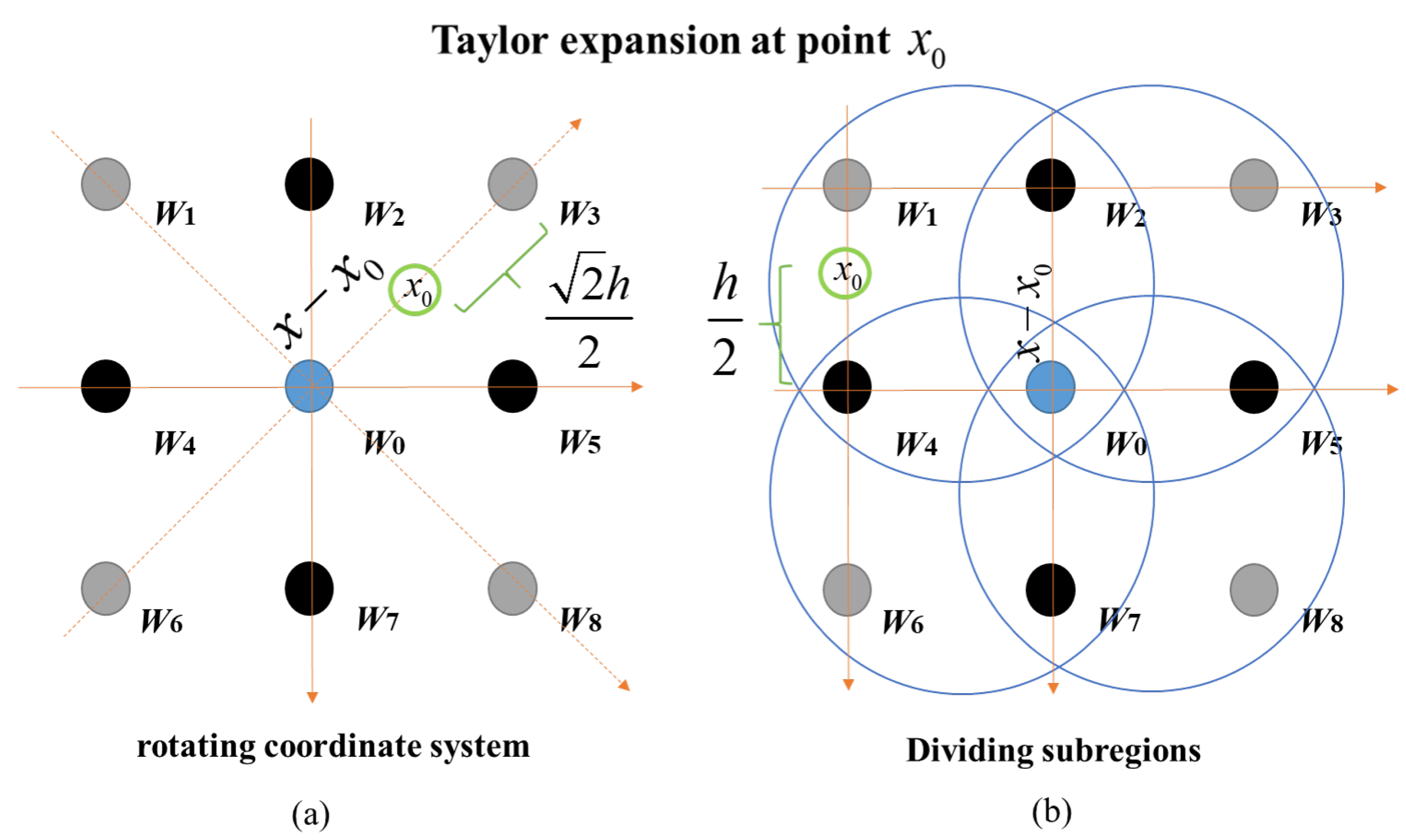
2.1. Principle and Process of the Proposed Algorithm
2.2. Analysis for the Error of the Algorithm
3. Numerical Simulation Analysis
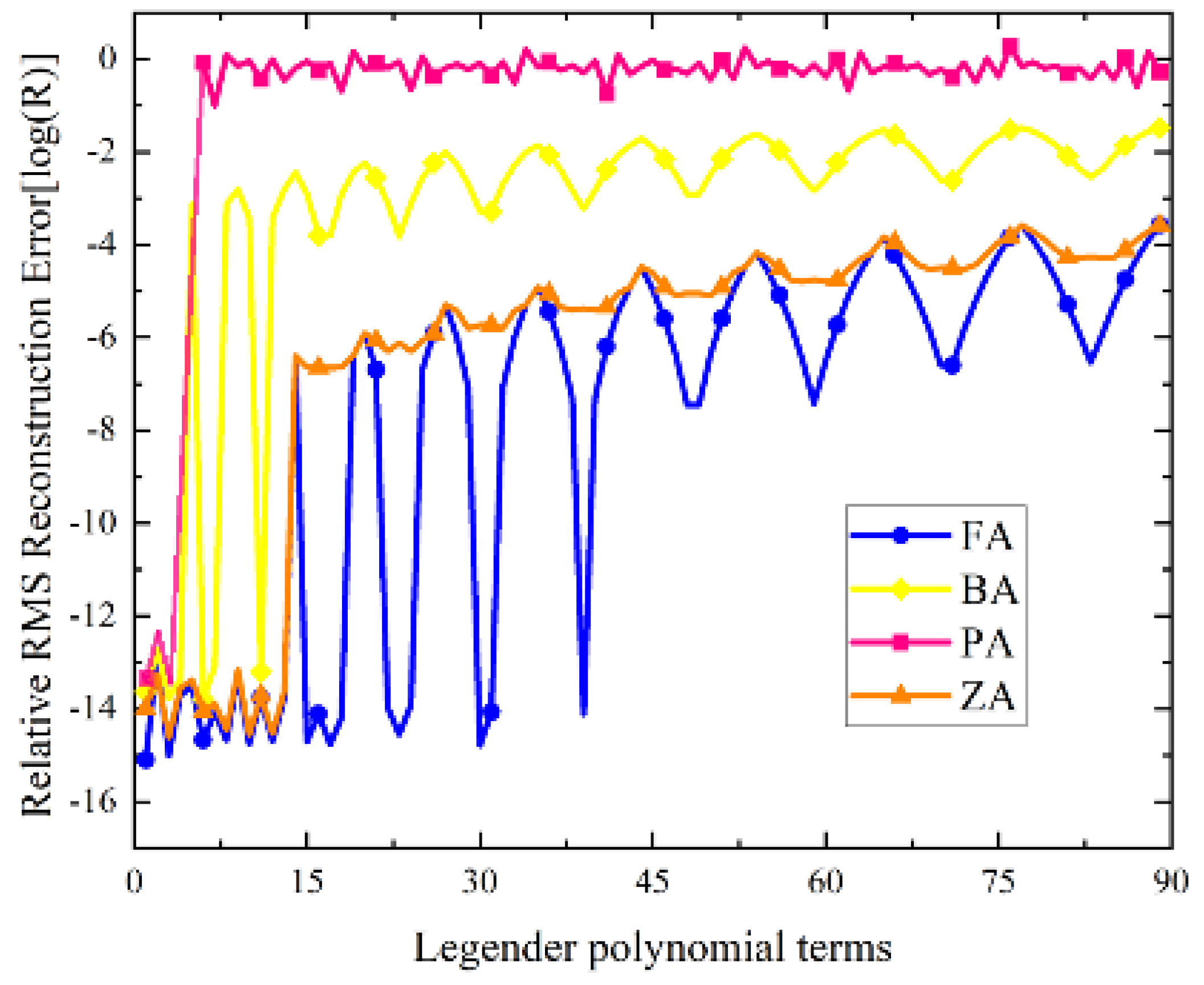
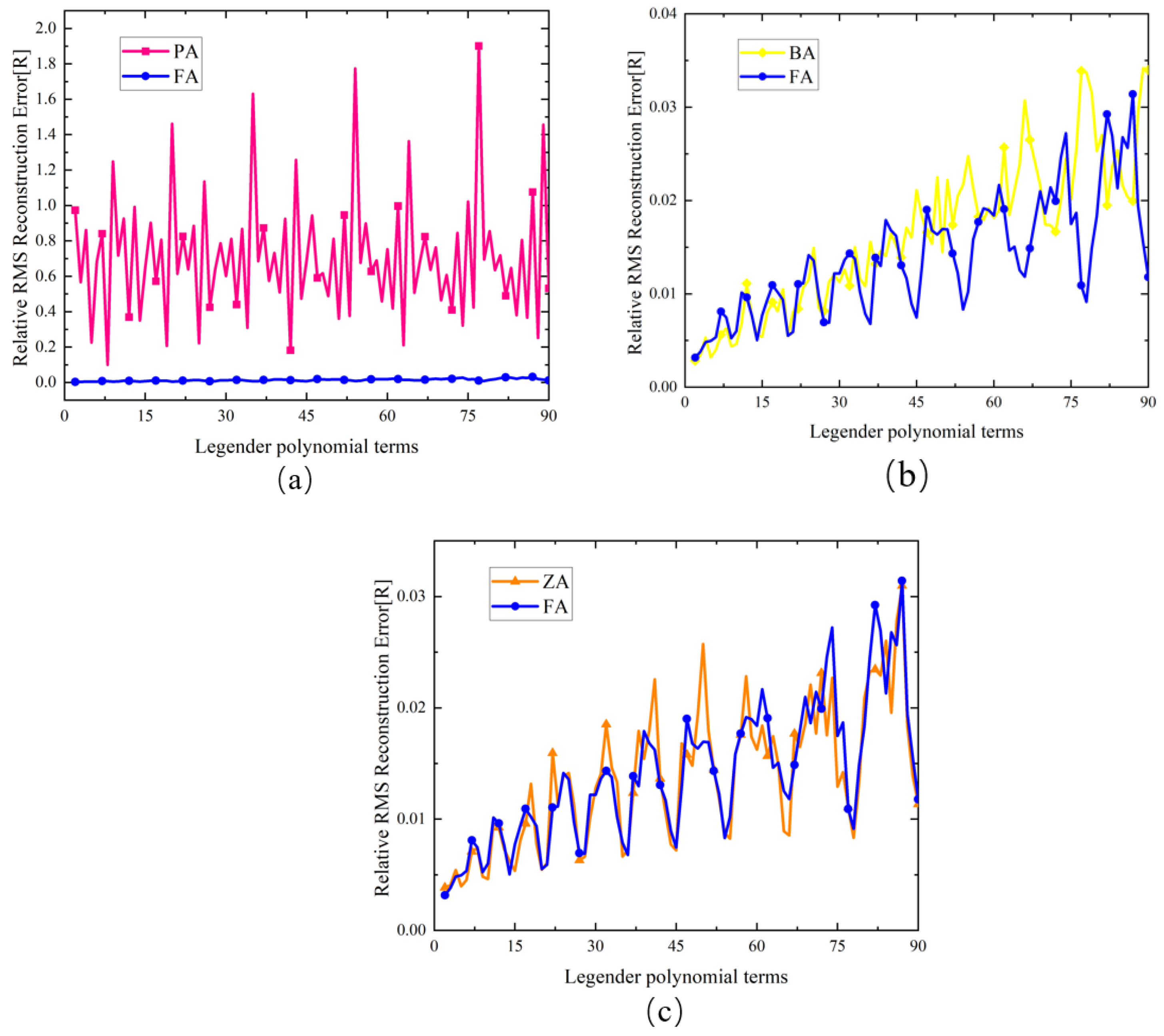
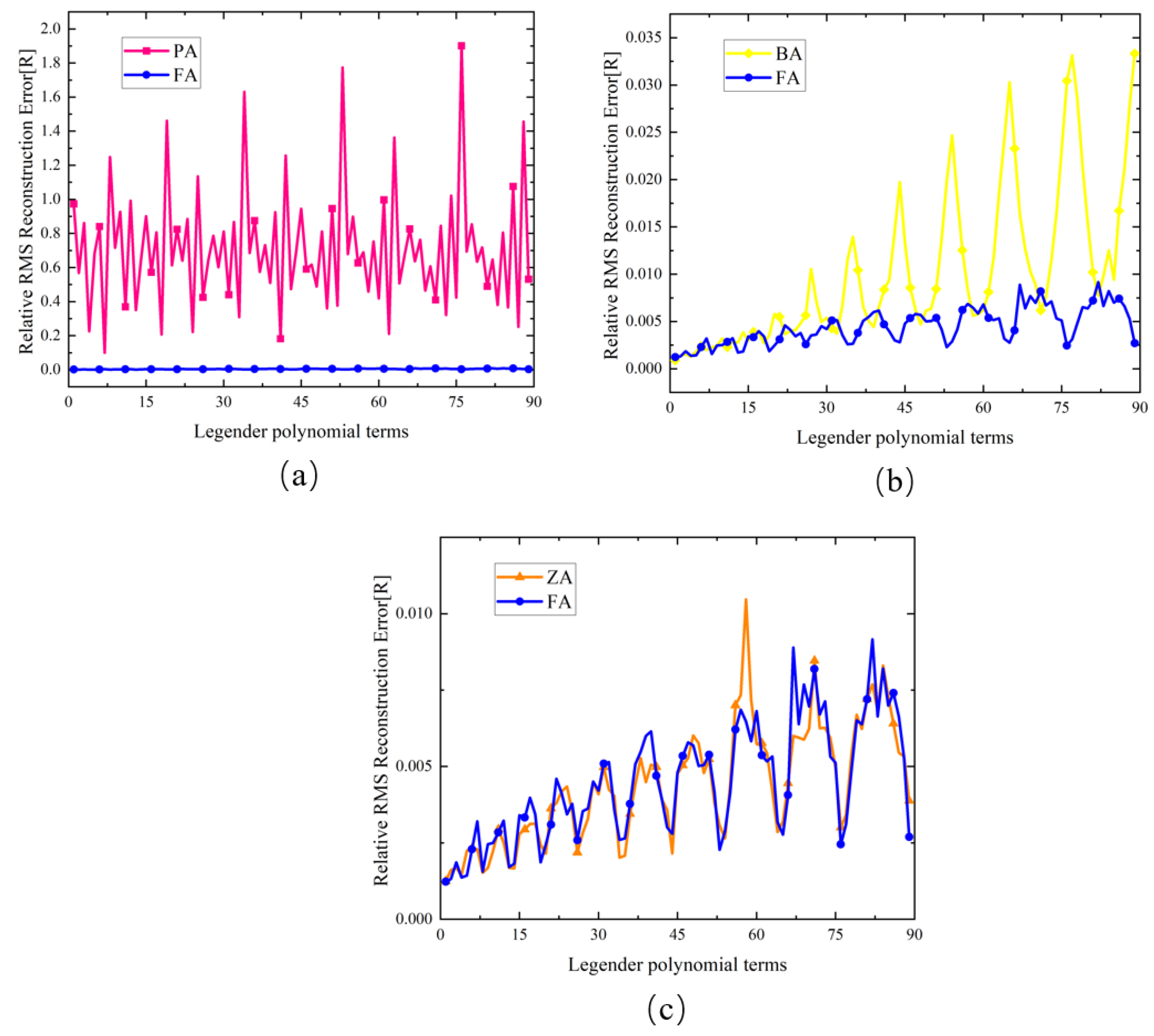
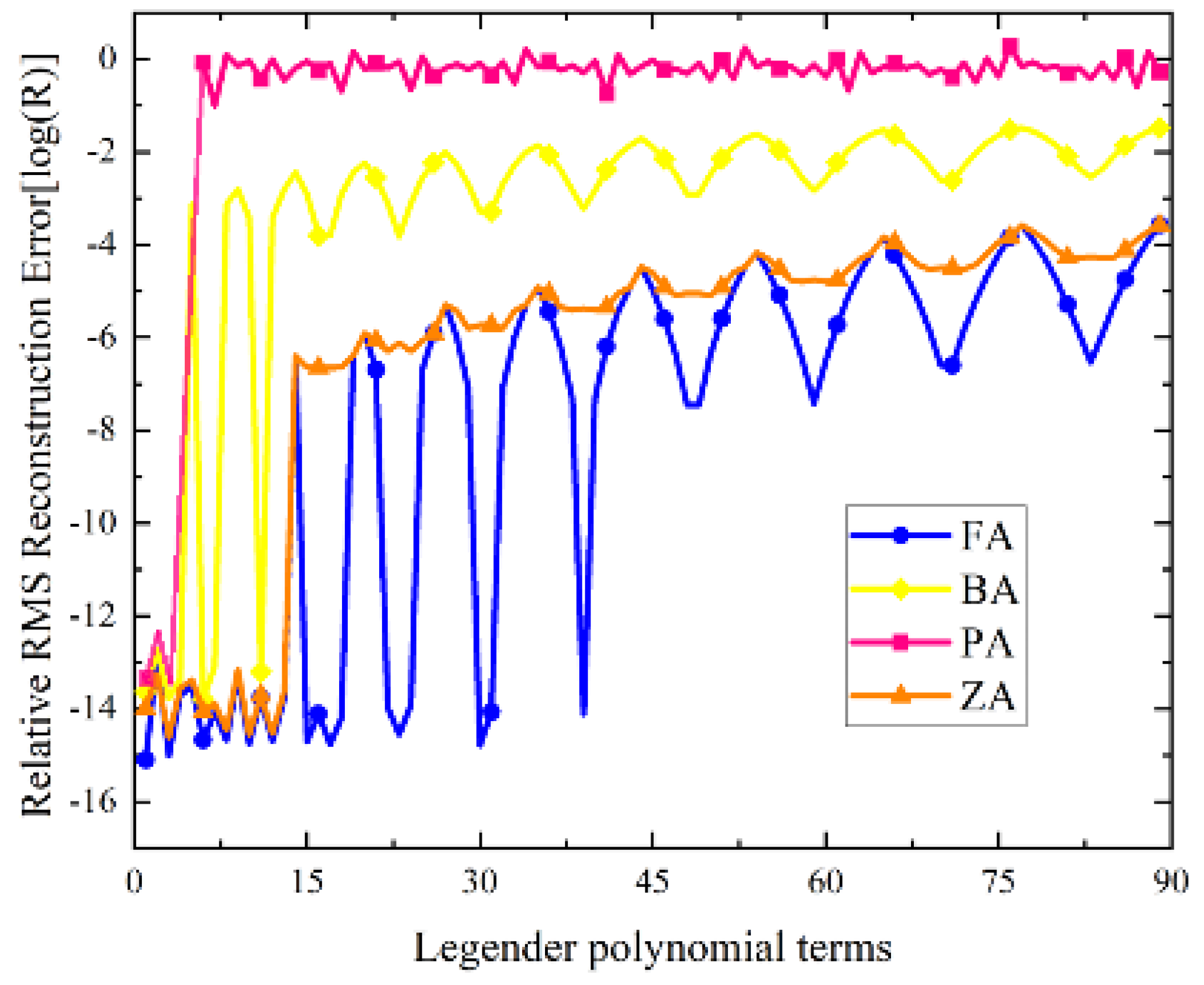
3.1. Algorithm Accuracy
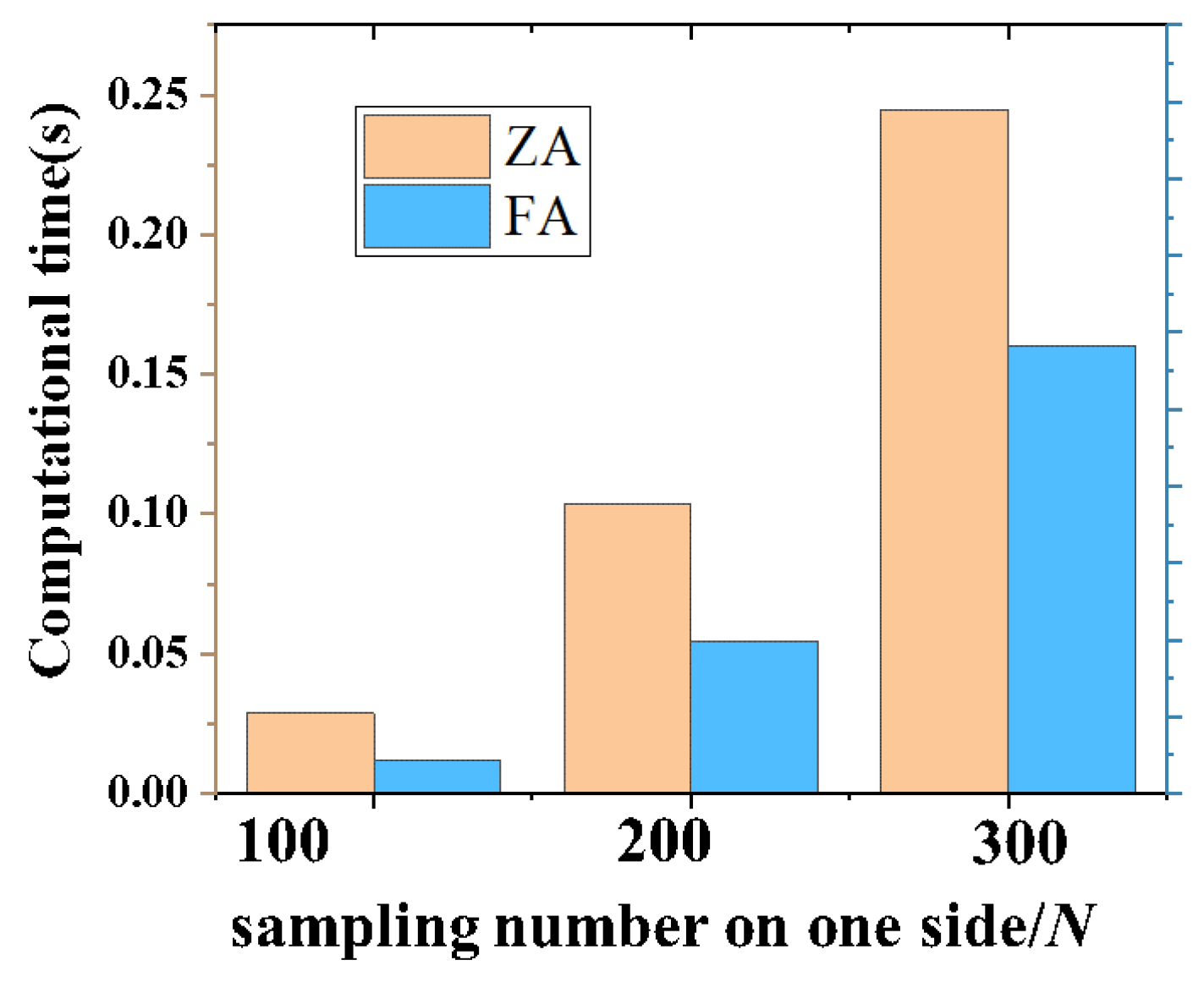
3.2. Reconstruction Speed
3.3. Noise Immunity of Algorithm
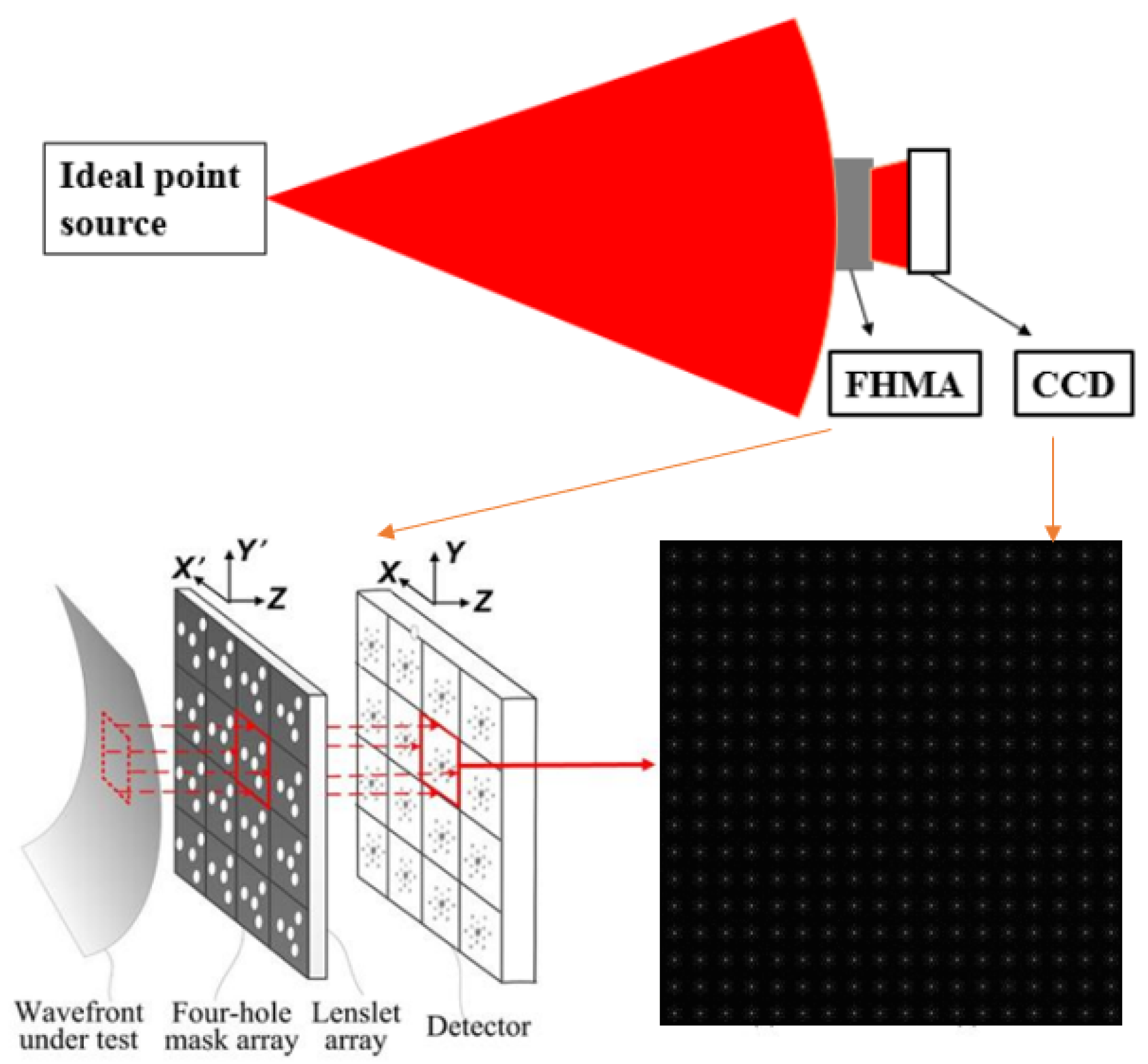
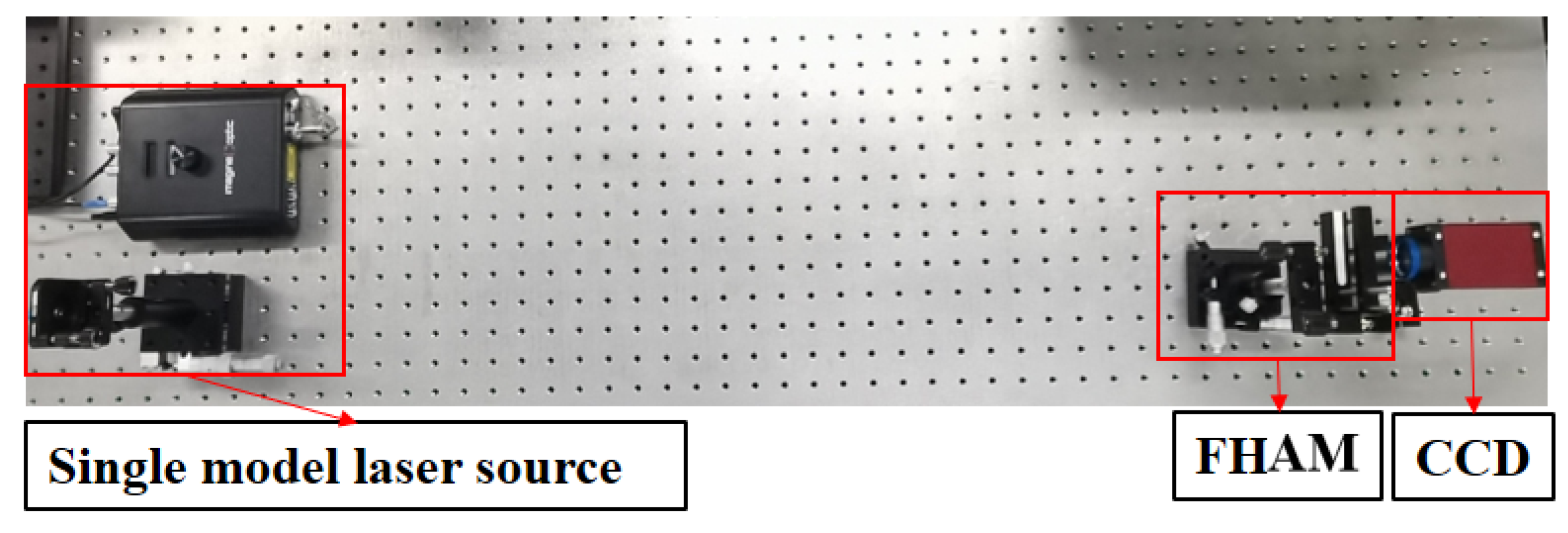
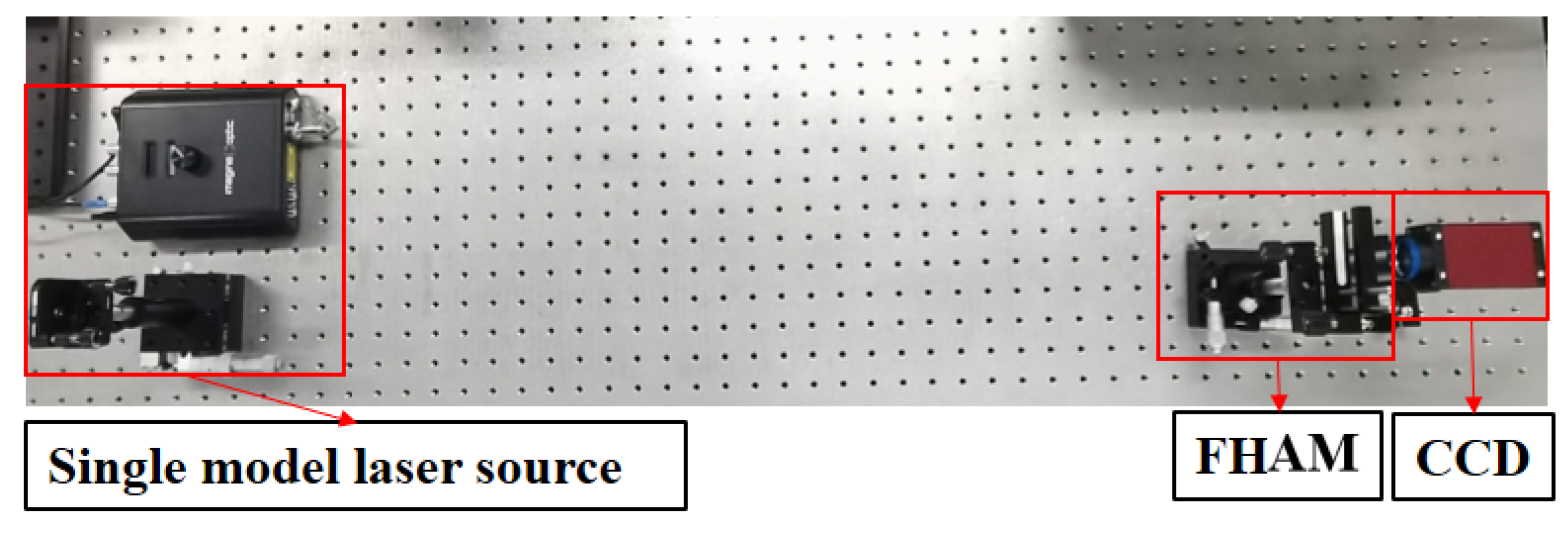
4. Experimental Application
5. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wu, X.; Huang, L.; Gu, N.; Tian, H.; Wei, W. Study of a Shack-Hartmann wavefront sensor with adjustable spatial sampling based on spherical reference wave. Opt. Lasers Eng. 2023, 160, 107289. [Google Scholar] [CrossRef]
- Valdivieso-González, L.; Muñoz-Potosi, A.; Tepichin-Rodriguez, E. Design and characterization of a safe Shack–Hartmann type aberrometer for making in-vivo measurements: Heuristic approximation. Opt. Commun. 2020, 454, 124500. [Google Scholar] [CrossRef]
- Bolbasova, L.; Gritsuta, A.; Kopylov, E.; Lavrinov, V.; Lukin, V.; Selin, A.; Soin, E. Atmospheric turbulence meter based on a Shack–Hartmann wavefront sensor. J. Opt. Technol. 2019, 86, 426–430. [Google Scholar] [CrossRef]
- Birzhandi, S.; Madanipour, K.; Ghanbari, S. Nonlinear refractive index measurement of a trapped particle with Shack–Hartmann wavefront sensor. Opt. Commun. 2019, 444, 154–159. [Google Scholar] [CrossRef]
- Furukawa, Y.; Takaie, Y.; Maeda, Y.; Ohsaki, Y.; Takeuchi, S.; Hasegawa, M. Development of one-shot aspheric measurement system with a Shack–Hartmann sensor. Appl. Opt. 2016, 55, 8138–8144. [Google Scholar] [CrossRef]
- Sheldakova, J.; Kudryashov, A.; Zavalova, V.; Romanov, P. Shack-Hartmann wavefront sensor versus Fizeau interferometer for laser beam measurements. SPIE 2009, 7194, 66–73. [Google Scholar]
- Basavaraju, R.M.; Akondi, V.; Weddell, S.J.; Budihal, R.P. Myopic aberrations: Simulation based comparison of curvature and Hartmann Shack wavefront sensors. Opt. Commun. 2014, 312, 23–30. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, S.; Xian, H.; Rao, C. Analytical calibration of slope response of Zernike modes in a Shack–Hartmann wavefront sensor based on matrix product. Opt. Lett. 2022, 47, 1466–1469. [Google Scholar] [CrossRef] [PubMed]
- Liang, Y.; Zhu, T.; Du, X.; Xu, J.; Fan, S.; Wang, H. Fabrication of a microlens array on diamond for Shack-Hartmann sensor. Diam. Relat. Mater. 2022, 121, 108783. [Google Scholar]
- Huang, J.; Yao, L.; Wu, S.; Wang, G. Wavefront Reconstruction of Shack-Hartmann with Under-Sampling of Sub-Apertures. Photonics 2023, 10, 65. [Google Scholar] [CrossRef]
- Mehrabkhani, S.; Wefelnberg, L.; Schneider, T. Fourier-based solving approach for the transport-of-intensity equation with reduced restrictions. Opt. Express 2018, 26, 11458–11470. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Xu, J.; Zhong, L.; Zhang, Q.; Wang, H.; Tian, J.; Lu, X. An orthogonal direction iterative algorithm of the transport-of-intensity equation. Opt. Lasers Eng. 2019, 120, 6–12. [Google Scholar] [CrossRef]
- Nielsen, C.J.G.; Preumont, A. Adaptive Petal Reflector: In-Lab Software Configurable Optical Testing System Metrology and Modal Wavefront Reconstruction. Sensors 2023, 23, 7316. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Li, D.; Zhang, C.; Kewei, E.; Hong, Z.; Li, C. Improved zonal wavefront reconstruction algorithm for Hartmann type test with arbitrary grid patterns. In Proceedings of the 2015 International Conference on Optical Instruments and Technology: Optoelectronic Measurement Technology and Systems, Beijing, China, 17–19 May 2015; SPIE: Bellingham, DC, USA, 2015; Volume 9623, pp. 343–351. [Google Scholar]
- Southwell, W.H. Wave-front estimation from wave-front slope measurements. J. Opt. Soc. Am. 1980, 70, 998–1006. [Google Scholar] [CrossRef]
- Hudgin, R.H. Wave-front reconstruction for compensated imaging. J. Opt. Soc. Am. 1977, 67, 375–378. [Google Scholar] [CrossRef]
- Fried, D.L. Least-square fitting a wave-front distortion estimate to an array of phase-difference measurements. J. Opt. Soc. Am. 1977, 67, 370–375. [Google Scholar] [CrossRef]
- Li, G.; Li, Y.; Liu, K.; Ma, X.; Wang, H. Improving wavefront reconstruction accuracy by using integration equations with higher-order truncation errors in the Southwell geometry. J. Opt. Soc. Am. A 2013, 30, 1448–1459. [Google Scholar] [CrossRef] [PubMed]
- Viegers, M.; Brunner, E.; Soloviev, O.; De Visser, C.; Verhaegen, M. Nonlinear spline wavefront reconstruction through moment-based Shack-Hartmann sensor measurements. Opt. Express 2017, 25, 11514–11529. [Google Scholar] [CrossRef]
- Barwick, S. Least-squares estimation for hybrid curvature wavefront sensors. Opt. Commun. 2011, 284, 2099–2108. [Google Scholar] [CrossRef]
- Pathak, B.; Boruah, B.R. Improved wavefront reconstruction algorithm for Shack–Hartmann type wavefront sensors. J. Opt. 2014, 16, 055403. [Google Scholar] [CrossRef]
- Zhong, H.; Li, Y.; Qin, P.; He, F.; Liu, K. Hybrid wavefront reconstruction from multi-directional slope and full curvature measurements using integral equations with higher-order truncation errors for wavefront sensors. Opt. Lasers Eng. 2022, 154, 106991. [Google Scholar] [CrossRef]
- Liu, K.; Wang, X.; Li, Y. Local slope and curvature tests via wavefront modulations in the Shack–Hartmann sensor. IEEE Photonics Technol. Lett. 2017, 29, 842–845. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LP17 | Computational Time (s) | ||
|---|---|---|---|
| Algorithm | 100 × 100 | 200 × 200 | 300 × 300 |
| FA | 0.02869 | 0.10363 | 0.24451 |
| BA | 0.05532 | 0.29948 | 0.79579 |
| PA | 0.04897 | 0.14419 | 0.39198 |
| ZA | 0.04248 | 0.19756 | 0.58311 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Zhong, H.; Li, Y.; Liu, K. Fast and Highly Accurate Zonal Wavefront Reconstruction from Multi-Directional Slope and Curvature Information Using Subregion Cancelation. Appl. Sci. 2024, 14, 3476. https://doi.org/10.3390/app14083476
Liu S, Zhong H, Li Y, Liu K. Fast and Highly Accurate Zonal Wavefront Reconstruction from Multi-Directional Slope and Curvature Information Using Subregion Cancelation. Applied Sciences. 2024; 14(8):3476. https://doi.org/10.3390/app14083476
Chicago/Turabian StyleLiu, Shuhao, Hui Zhong, Yanqiu Li, and Ke Liu. 2024. "Fast and Highly Accurate Zonal Wavefront Reconstruction from Multi-Directional Slope and Curvature Information Using Subregion Cancelation" Applied Sciences 14, no. 8: 3476. https://doi.org/10.3390/app14083476
APA StyleLiu, S., Zhong, H., Li, Y., & Liu, K. (2024). Fast and Highly Accurate Zonal Wavefront Reconstruction from Multi-Directional Slope and Curvature Information Using Subregion Cancelation. Applied Sciences, 14(8), 3476. https://doi.org/10.3390/app14083476