1. Introduction
The transport sector represents almost a quarter of Europe’s greenhouse gas emissions and is the main cause of air pollution in cities. Facing this problem, the European Commission (EU) established a series of legislative proposals to decrease the total emissions of the transport fleet, with the final purpose of achieving climate neutrality in the EU by 2050. To carry out this transition, the EU defined an intermediate target of an at least 55% net reduction in greenhouse gas emissions by 2030 [
1]. Considering that petroleum-based fuels used in internal combustion engines (ICEs), which are extensively used in vehicle propulsion, are a key actor in the problem of greenhouse gases and air pollution [
2], several technologies to progressively replace them are currently on the market. One possibility is the use of hydrogen-based and carbon-neutral fuels [
3] to retain the technological knowledge and productive infrastructure of almost a century of ICE development. Another option is the use of battery electric vehicles (BEVs) and hybrid electric vehicles (HEVs).
Different types of HEV architectures are designed to accommodate diverse driving needs, efficiency requirements, and technological advancements, and this subject has been widely discussed in the literature [
4,
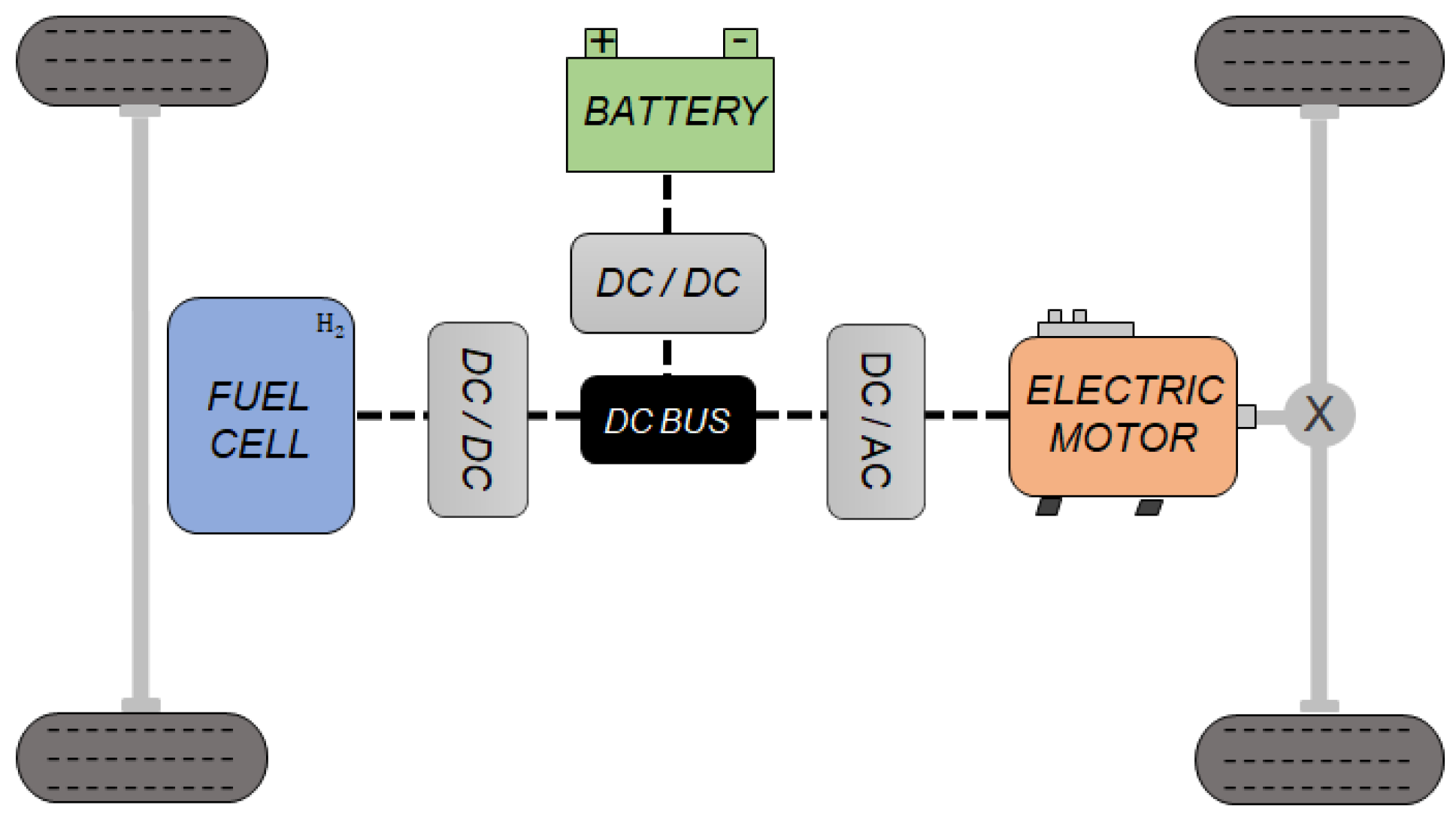
5]. A fuel cell electric vehicle (FCEV) is essentially an electric vehicle that combines batteries with a fuel cell to power its onboard electric motor [
6]. The fuel cell converts chemical into electrical energy without going through other energy forms such as thermal and mechanical. Therefore, the efficiency of the fuel cell is not limited by Carnot’s cycle, and an FCEV can reach triple the fuel efficiency of a regular gasoline-powered car in some operating conditions [
7]. However, fuel cells (FCs) have some drawbacks, such as limited range due to difficulties with hydrogen storage onboard, lack of a hydrogen recharging infrastructure, and safety challenges [
8]. So these limitations and system complexity add cost to the production and use of this technology. On the other hand, the source of hydrogen production is an important factor that needs to be considered when defining hydrogen as clean energy. In this sense, when hydrogen is produced by electrolysis using photovoltaic, wind power, or hydraulic power as the source of energy, it is known as green hydrogen [
9]. Nevertheless, 95% of the total current worldwide hydrogen production comes from fossil sources and just 4% from electricity [
10].
Given the complexity of FCEV powertrains, specifically due to the multiple energy storage systems, the energy management strategy (EMS) is essential for their efficiency and energy consumption [
11]. For each situation, the EMS decides the percentage of the vehicle power demand that must be supplied by each of the energy sources [
12]. Also, to make this propulsion system competitive and economically viable compared to traditional ICEs, there are still many challenges, such as high maintenance costs and short lifecycle [
13]. These challenges are related to the interaction between several ageing mechanisms that react differently with various operating conditions that cause a drop in system performance. The ageing process in fuel cell components also affects the operation of the EMS; however, this aspect is barely considered in the FCEV EMS [
14].
Due to the simplicity required for real-time applications, models used for powertrain control are susceptible to uncertainties due to several factors, such as modelling simplifications, limitations in the range of situations considered during calibration, dynamic changes, measurement errors, unit-to-unit variability, or ageing. These errors are propagated to the powertrain control, ultimately impacting the overall performance of the vehicle. In vehicle control applications, electronic control units (ECUs), crucial components in commercial vehicle applications, manage various functions such as engine management, transmission control, and braking systems. ECUs continuously monitor parameters based on sensor inputs to optimize performance, contributing to the overall functioning of the vehicle powertrain [
15]. The predominant approach implemented in EMSs and commercial ECUs to model nonlinear and operating-point-dependent behaviours is the use of look-up tables because, even though they require substantial calibration efforts, this is a well-established process in the automotive industry that produces robust performance [
16].
The ageing processes in FCs may lead to important differences between the map included in the calibration and that representing the actual fuel cell behaviour. These deviations increase the fuel consumption because the EMS employs a calibration that does not correspond to the actual system state. As a result, these deviations encourage the implementation of techniques that are able to adapt the previously calibrated look-up tables. In this line, ref. [
17] proposed a method based on the Lyapunov adaptation law to estimate the linear and nonlinear parameters such as voltage, power, and internal resistance of a polymer electrolyte membrane fuel cell (PEMFC). Also, ref. [
18] developed an extended Kalman filter approach for PEMFC to obtain robust real-time-capable state estimations of a high-order FC model for observer applications mixed with control or fault detection.
The use of Kalman-filter-based approaches for state estimation in automotive control strategies has been extensively used, as in [
19,
20,
21,
22]. In addition, the Kalman filter can be used for model parameter estimation and, specifically, look-up table adaption. In this context, ref. [
16] developed an online adaptive algorithm for NOx map calibration and updating for ICE control based on a simplification of the Kalman filter that allows consideration of updates of the table elements around the measured values instead of the complete table. This proposed solution showed results with similar accuracy to a standard Kalman filter but required lower computational time and memory. In the same field of ICE control, ref. [
23] developed a method for bias compensation and online adaption of the air mass flow map of a diesel engine using an extended Kalman filter. As an example of an application in the field of electric vehicles, ref. [
24] proposed a method wherein a Kalman filter is used to estimate the ohmic resistance of a lithium-ion battery by updating an entire look-up table based on local estimation at the current operating conditions; the results of the simulations show that the method is able to update the look-up table, even in operating conditions that were barely excited.
In line with the previous discussion, this paper introduces an adaptive approach to enhance calibration of the fuel cell model utilized within the EMSs of FCEVs. The primary aim is to enhance the accuracy of the fuel cell model, consequently improving the overall energy management performance. While existing research utilizes observers to estimate the internal states of fuel cells for vehicle control applications [
25,
26] or to approximate look-up table parameters in conventional ICE vehicles [
16,
23], this work brings the novelty of developing an adaptive strategy for online map calibration and updating fuel cell models implemented in the EMS of an FCEV. In this way, the paper analyses the potential of updating the FC model by an extended Kalman filter (EKF) used in the EMS, highlighting the effect of the improved accuracy with respect to fuel consumption. These parameters are adjusted based on FC power measurements using an EKF approach. The EMS maintains a simple look-up table but with improved performance by correcting calibration errors, drift, or ageing.
The article is structured as follows: In
Section 2, ’Methodology’, we introduce a case study, describe the fuel cell model calibration process, provide details about the vehicle model, and discuss the energy management strategy along with the proposed approach. Following this, the results are discussed in
Section 3, where the baseline calibration is compared with the proposed approach, and the algorithm adaptation speed is also investigated. The final conclusions of the article are presented in
Section 4.
3. Results and Discussion
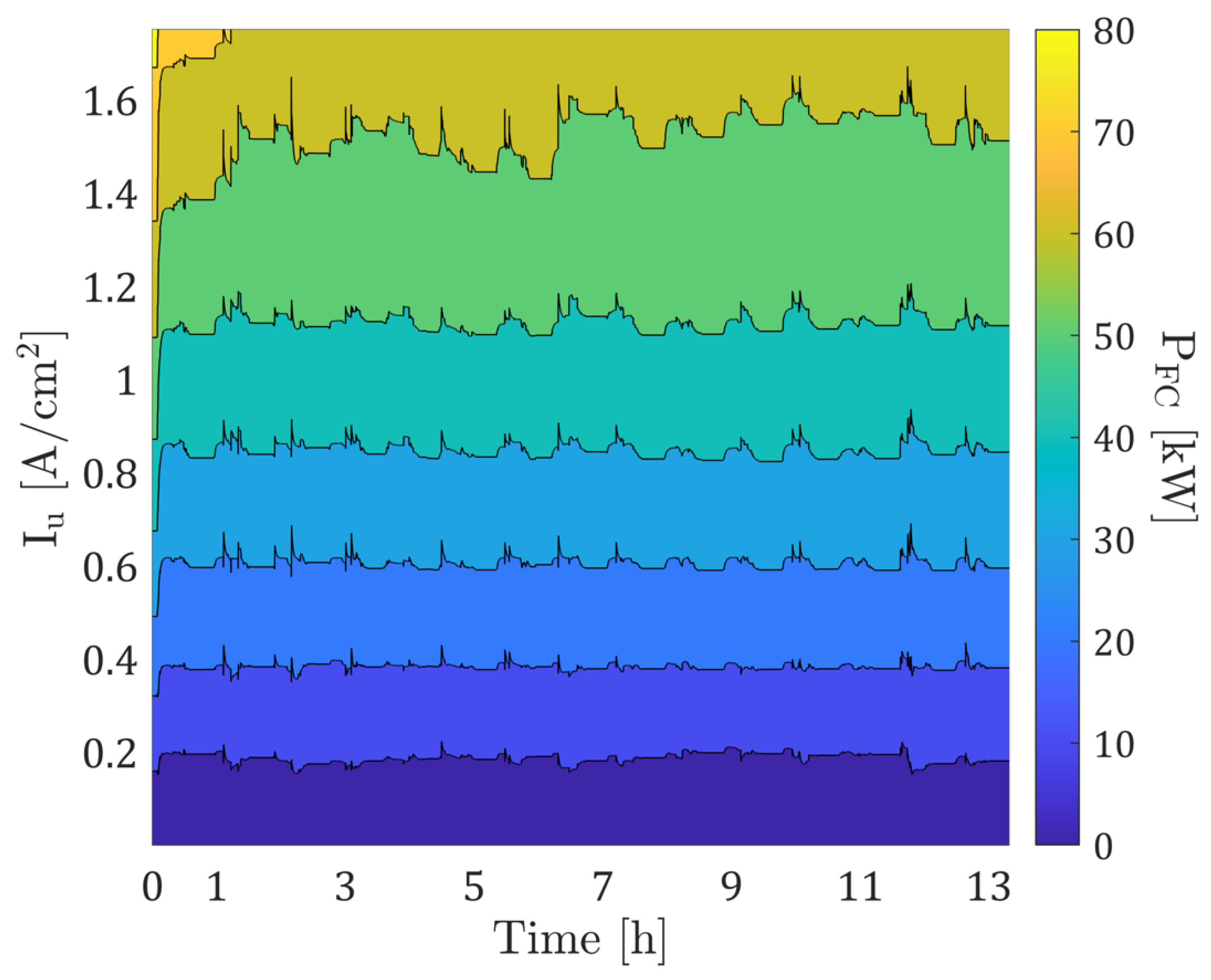
The evolution of the map adaptations by the proposed method when the FCEV is covering 15 cycles is shown in
Figure 7. This figure shows how the learning map (LM) evolves as the vehicle covers the different driving conditions of the cycles. To expose the method to the worst scenario, at the start of the test, the map of the BM was conditioned as the initial map. In this case there is no information about the ageing level of the FC or operating time that the FCEV has already covered. Due to the warming and low-temperature conditions of the fuel cell, the adaptations are only activated at temperatures above 340 K to avoid corrections during these short periods. Once the fuel cell starts to run and the correction is activated, the adaptation on the maps evolves, and when the FCEV switches off, the map is stored and then used for the next trip and so on. When the FCEV runs again, the map keeps evolving to correct these deviations.
According to
Figure 7, as the time duration of each cycle is around one hour, higher correction rates are observed during the first driving cycle. So in this case, about 1 h is needed for the algorithm to adapt the map and stabilize it until reaching a condition with lower amplitudes in the map adaptation. Furthermore, one can expect that even if the algorithm strongly adjusts the map in the first hour, the map should maintain a relatively stable map profile during subsequent hours, particularly at high current densities. The ongoing variations observed from medium to high current densities are closely linked to the dynamic responses of the fuel cell. This phenomenon is primarily attributed to rapid changes in the fuel cell operating conditions, often resulting in fuel cell stack temperature fluctuations.
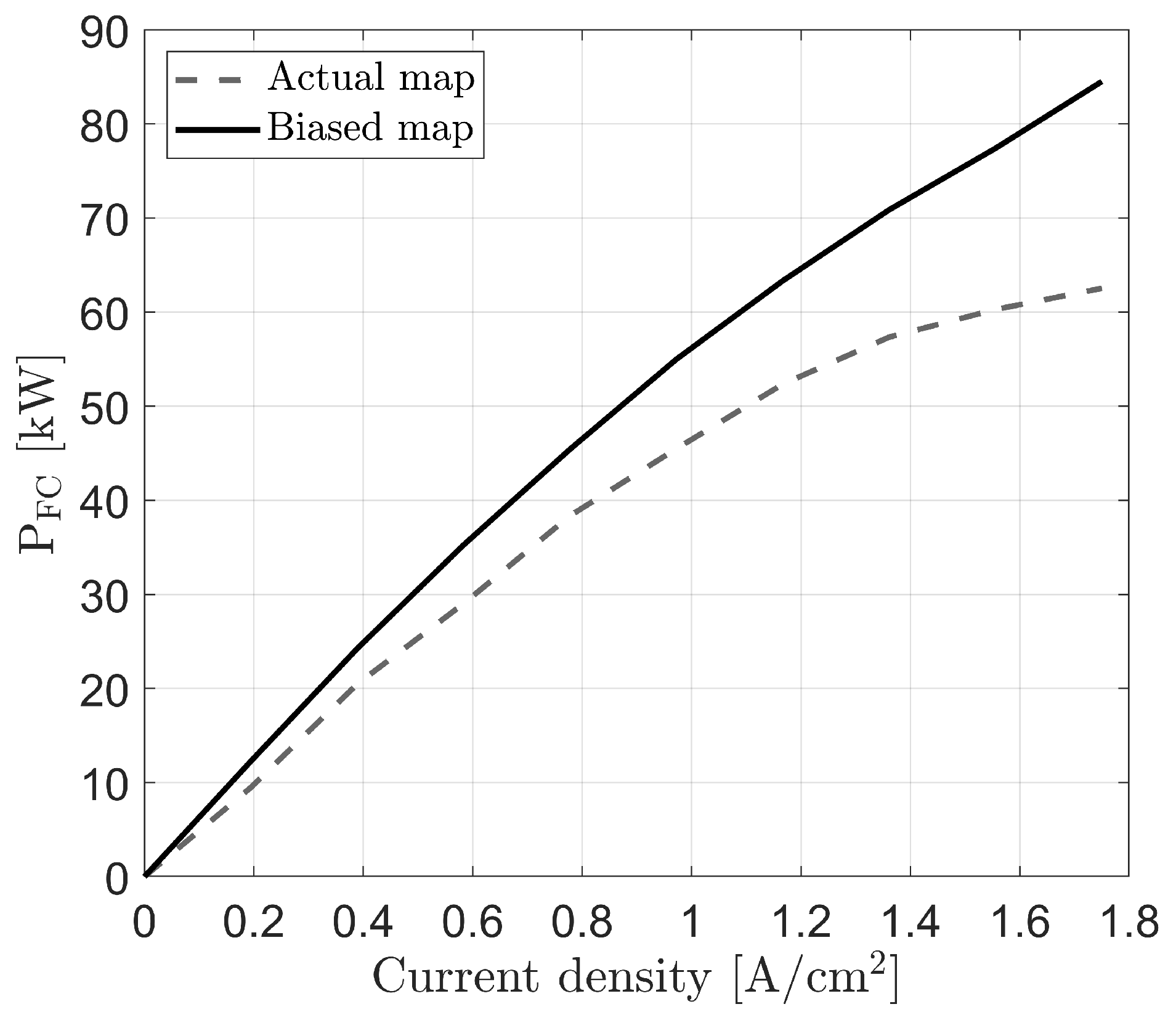
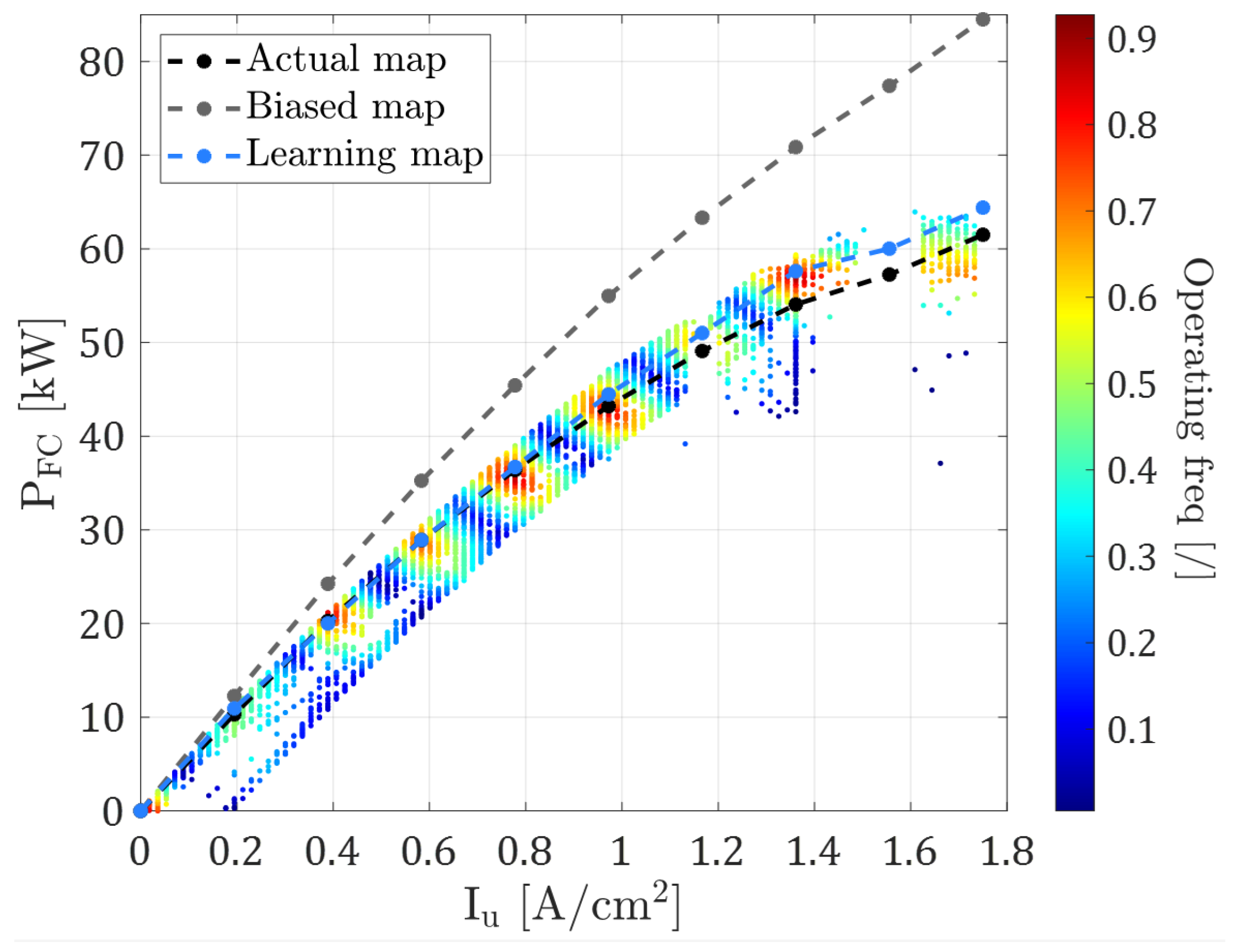
For comparison purposes,
Figure 8 illustrates the three maps together. In the cases of the AM and BM, these maps remained constant throughout all simulations. In contrast, for the LM case, this map represents the final adaptation achieved after the end of the simulations. Regarding the operating points distributed on the plot, these points represent the output power of the fuel cell as a function of the control input
provided by the EMS to the fuel cell over the 15 cycles of the LM case.
According to
Figure 8, two problems can be underlined when working with COM. First, the differences between the full cell power estimated by the COM (1D look-up table) and the one provided by the plant (GT model) depend on the calibration. However, despite the high calibration effort for mapping the fuel cell used in the AM, this map still shows that it is impossible to cover the region perfectly with the highest operating frequency (red), showing that it is possible to correct and improve the accuracy of the FC models. Second, independent of the model calibration, there will always be deviation in the estimation due to simplification of the system to a 1D look-up table. For this reason, providing a more accurate estimation of the output FC power by the EMS can ensure that the FC will operate closer to optimal conditions and then improve fuel consumption. Moreover, as observed in the map adaptations of
Figure 7, it is expected that if the adaptative method can provide quick corrections to the map, the difference between the actual output power the FC provides and the one estimated by the map can be minimized. To some extent, the system dynamic can be considered by the EMS to compute the proper power split, which will be further discussed in this section.
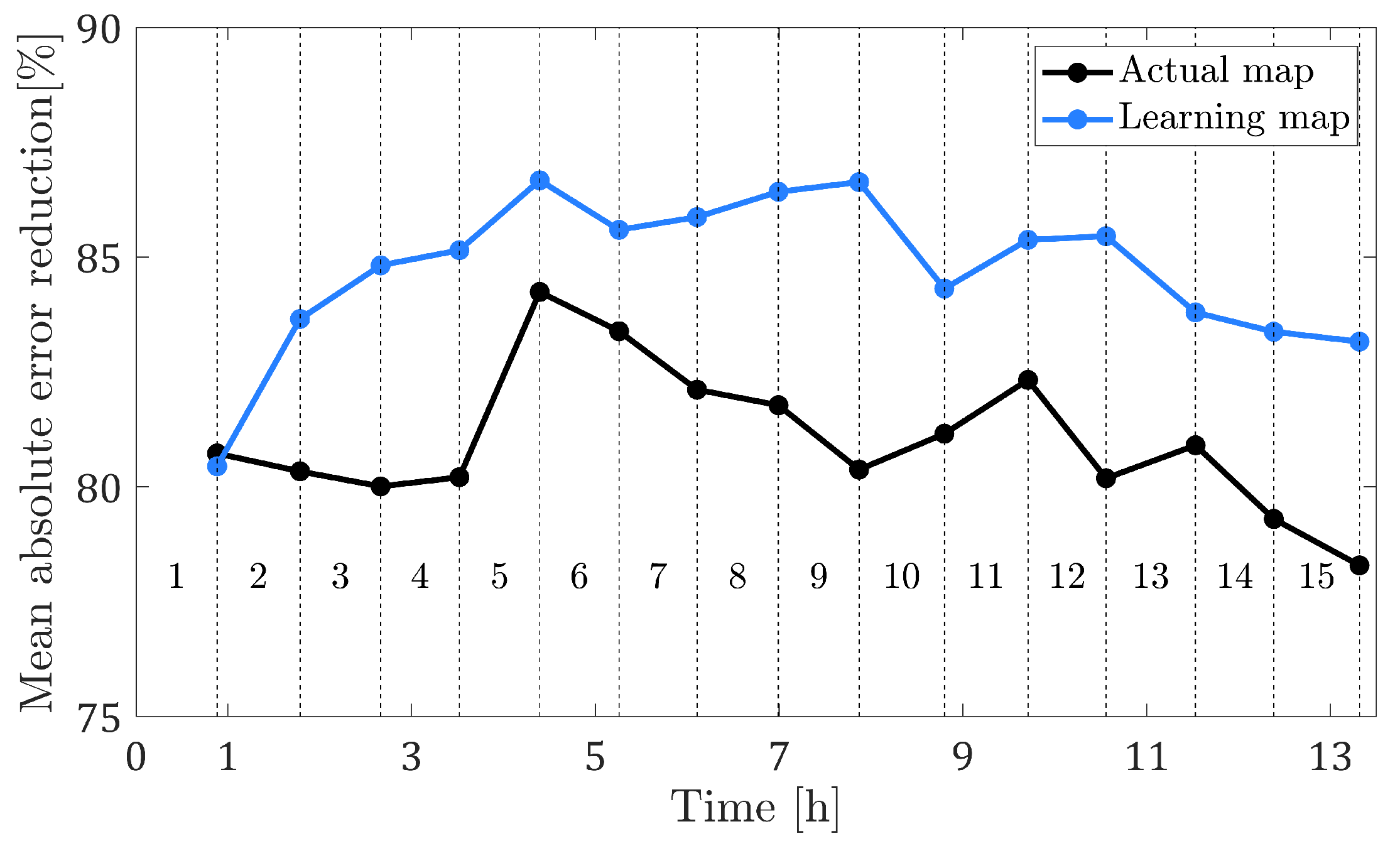
Figure 9 presents the reduction in the mean absolute error (MAE) for fuel cell power estimation in the AM and LM compared to the BM under identical driving conditions. This approach allows a statistical comparison of how the three maps correlate with the actual fuel cell output power. The MAE is calculated by determining the absolute difference between the predicted FC power estimated by the maps and the measured FC output power for all the data in one cycle. Remarkably, within just 1 h of operation, the LM achieves substantially lower estimation errors, obtaining an error reduction of 85% compared with the BM. In contrast, the AM reduces the error by around 81%. These results highlight that the BM does not provide an acceptably accurate estimation of fuel cell power and propagates errors that can affect powertrain control and overall vehicle performance. However, even though the AM achieves a similar error reduction to the LM, it relies on a complex calibration process that maps the aged FC model under steady-state conditions. This calibration process involves substantial effort to determine the actual level of ageing in the fuel cell, making it impractical for real-time control applications, suggesting the need for adaptation algorithms to improve calibration accuracy.
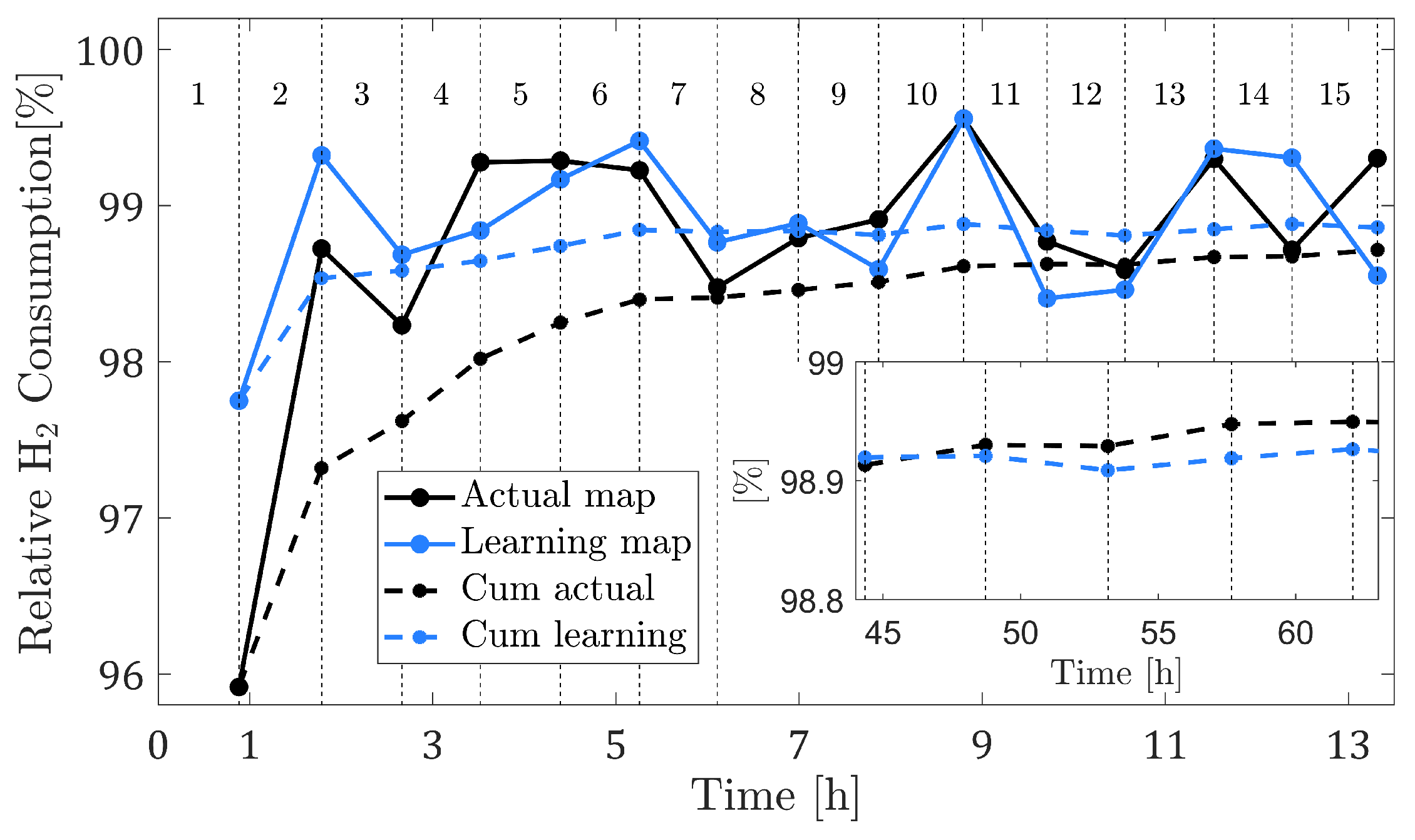
As expected, by increasing the fuel cell power estimation accuracy, the EMS can also generate better control actions for the fuel cell, thus ensuring fuel savings. Moreover,
Figure 10 shows the relative
consumption compared with that of the BM for each cycle and for the cumulative results of the 15 cycles. Due to the higher estimated error the BM provides, its poor estimation also affects the
consumption. When examining the LM, a reduction of 1.6% was observed in cycle 11 compared to the BM reference case, with a cumulative decrease of 1.2% across all cycles. Similarly, the AM exhibited a reduction of close to 1.7% in cycle 3 and a reduction of 1.3% for the cumulative consumption. It is important to note that the initial fuel consumption difference in the first cycle is influenced by variations in the battery state of charge that each of the three cycles reaches at the end of the cycle. In this context, AM significantly reduced hydrogen consumption due to higher battery energy depletion. However, considering long-term vehicle operation, it is possible to observe that after 45 h of vehicle use, the battery state of charge variation tends to be minimized, and the LM can overcome the cumulated
consumption and start to save fuel compared to the AM.
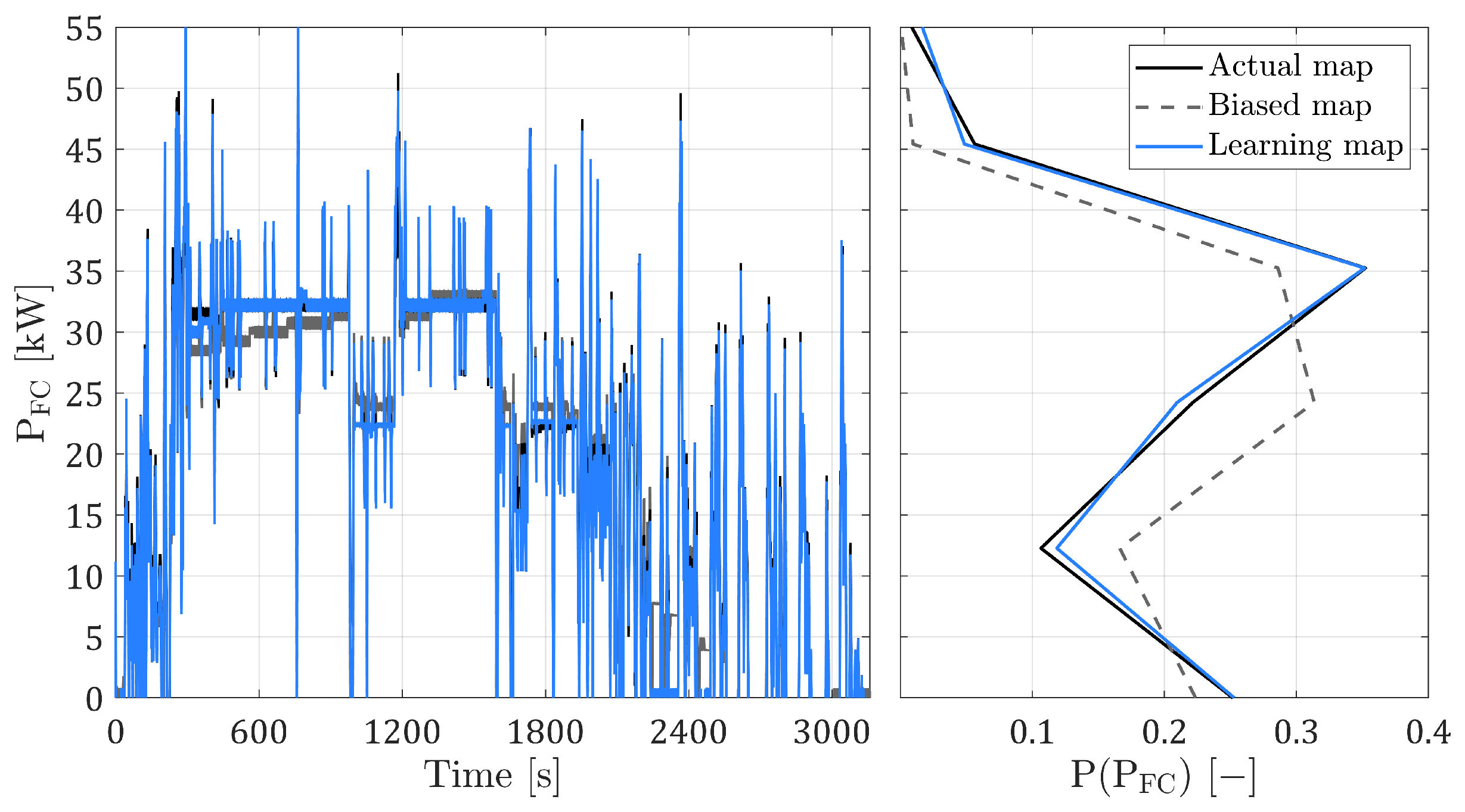
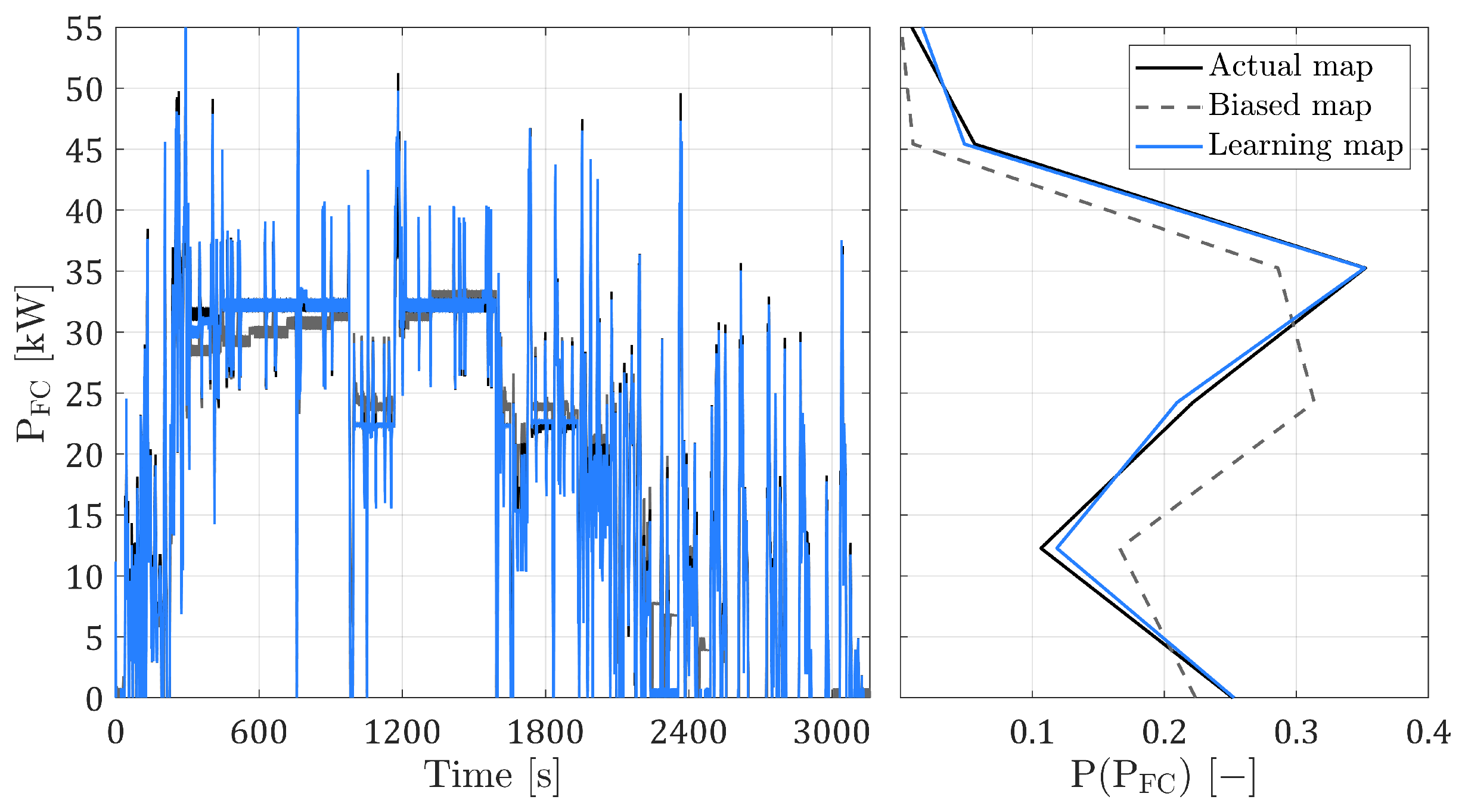
Figure 11 illustrates the impact of the three different maps on EMS control actions for the fuel cell. The left chart shows the evolution of fuel cell output power during the last cycle. In contrast, the right chart depicts the histogram of operation conditions at various fuel cell output power levels. When using the BM, the EMS predominantly controls the fuel cell to operate at medium to low power levels. In contrast, both the AM and the LM guide the EMS to distribute fuel cell operation at mid-range power levels. The high frequency of fuel cell operation at low power with the BM can be attributed to the map’s lower accuracy, as seen in
Figure 8. Consequently, the EMS assesses that the BM can provide more power at low and medium current densities for the same current density and hydrogen consumption compared to the other two maps. The importance of fuel model accuracy is highlighted when comparing the histograms of the control action decisions provided by the EMS for each calibration. As the FC model accuracy increases, the EMS can improve the control actions, leading to an expected reduction in fuel consumption.
An important parameter implemented in the algorithm is
R (Equation (
15b)). This parameter can regulate the Kalman gain of the adapter algorithm. In this case, the higher this value, the lower the gain. Employing a higher
R, it is expected that the algorithm slowly adapts the map, thus attributing higher reliability to the map previously implemented in the EMS. On the contrary, for a lower
R, the higher the Kalman gain, so the EMS relies more on measuring the fuel cell output power. For this reason, it provides fast adaptation of the map.
Figure 12 presents a parametric study of the proposed method using three different learning rates (
,
, and
), ranging from slow to fast learning rates, respectively. It is noticed that the proposed method can reduce the error in estimating the fuel cell power, presenting reductions close to 86% in some cycles. For all the learning rates, the proposed method generates strong adaptations to the map in the first 4 h of operation. Then, after this period, the medium and fast learning rates present better accuracy in the map adaptations. In addition, results with faster learning rates prove to be limited, as the algorithm is no longer able to reduce the error, but rather, it generates higher errors due to the dynamic operating conditions of the fuel cell, especially at higher loads. These limitations can be assigned to conditions wherein a sequence of measurements quickly adapt the map, but regardless, the algorithm is not capable of perfectly tracking all the deviations of the model due to the nonlinearity and complexity of the fuel cell system.
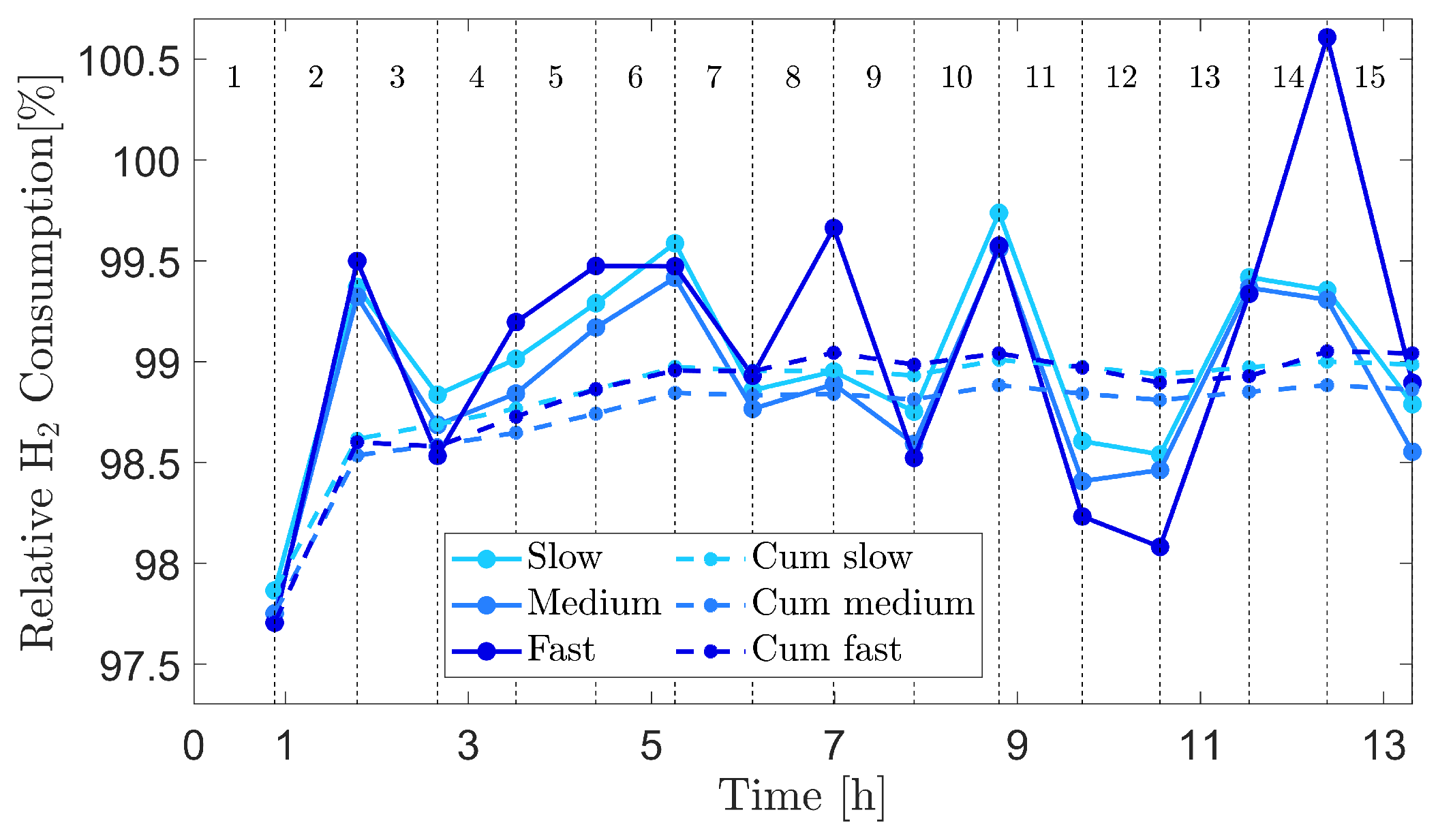
The learning rate also impacted hydrogen consumption,
Figure 13 shows the hydrogen consumption for each cycle and also the cumulative hydrogen consumption of all 15 cycles for the slow to fast learning rates. A similar pattern to the reduction in the estimation error in
Figure 12 is observed. Furthermore, analysing the consumption cycle to cycle, it is observed that in some cycles, the fast learning rate can overcome the fuel consumption reduction of the medium and slow learning rates, e.g., cycle 3. However, it can also increase hydrogen consumption in some conditions, as observed in cycle 14. However, when comparing the cumulative consumption, the medium learning rate shows slight improvements compared to the other two.
Finally, regarding the map adaptations with the three learning rates, it is demonstrated that the proposed method can guarantee improvements in map calibration up to a certain limit, constrained by the dynamic behaviour of the fuel cell. Furthermore, when comparing the overall performance of different learning rates using the BM as the reference, it becomes evident that in the case of the medium learning rate, the proposed method achieves slight improvements in estimation error and fuel savings considering the set of driving cycles compared to the cases of fast and slow learning rates.
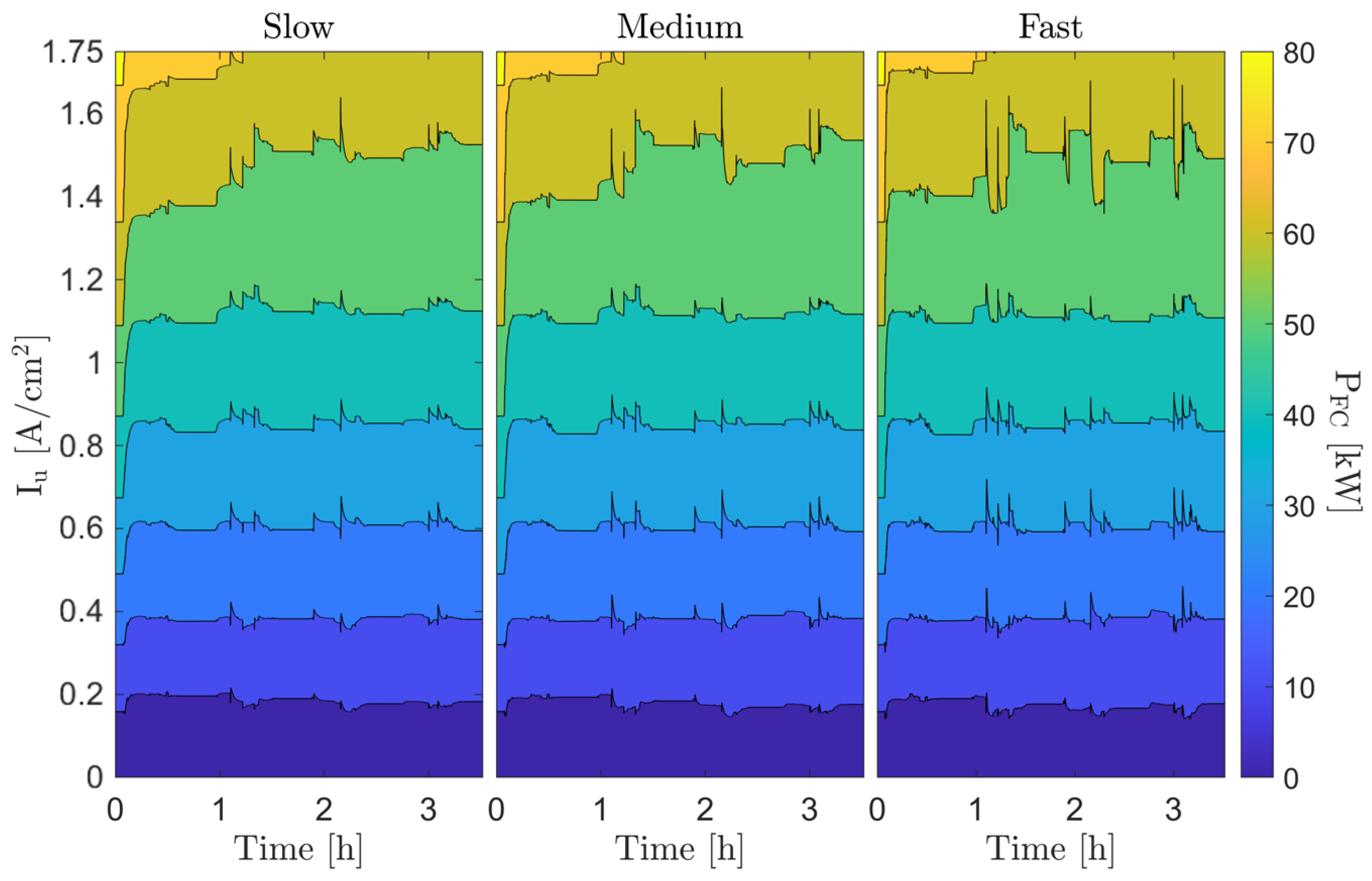
The evolution of map adaptations with three different learning rates is depicted in
Figure 14, spanning from the initial operation to the fourth cycle. For all the LM cases, the initial calibration employed is the BM, followed by an ongoing map adaptation as the FCEV operates. All three cases demonstrate the ability to rapidly update the map to match the current output power provided by the FC in the first minutes of operation. In the cases of medium and fast learning rates, the algorithm can adapt the maps quickly, applying stronger corrections to the map for any changes in fuel cell conditions. Conversely, the algorithm applies smoother corrections when employing the low learning rate. In this case, the algorithm requires more time during the initial stages of operation to adapt the map compared to the medium and fast learning rates. Note that in conditions for which the calibration is not being adjusted, the FC is running under the stack warm-up temperature threshold, which is considered to be 340 K.
The proposed method also faces limitations and challenges that warrant attention in future research. Firstly, the stack temperature emerges as a critical parameter influencing FC behaviour, particularly in low-temperature conditions, where the adaptive method ceases operation below the threshold of 340 K. Moreover, higher learning rates exhibit constraints in mitigating FC model errors as they introduce bias to the map adaptations, which limits the capture of FC dynamics in an FC simple map 1D look-up table. Additionally, the reliability and accuracy of FC power measurements are pivotal to the method’s efficacy. Therefore, the selection and assessment of sensors employed to measure FC output power must be thoroughly considered in order to evaluate the feasibility and effectiveness of the method. Addressing these limitations will be crucial for advancing the applicability and robustness of the proposed approach in real-world scenarios.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}