
Design of Unmanned Road Widths in Open-Pit Mines Based on Offset Reaction Times


Abstract
1. Introduction
2. Methodology
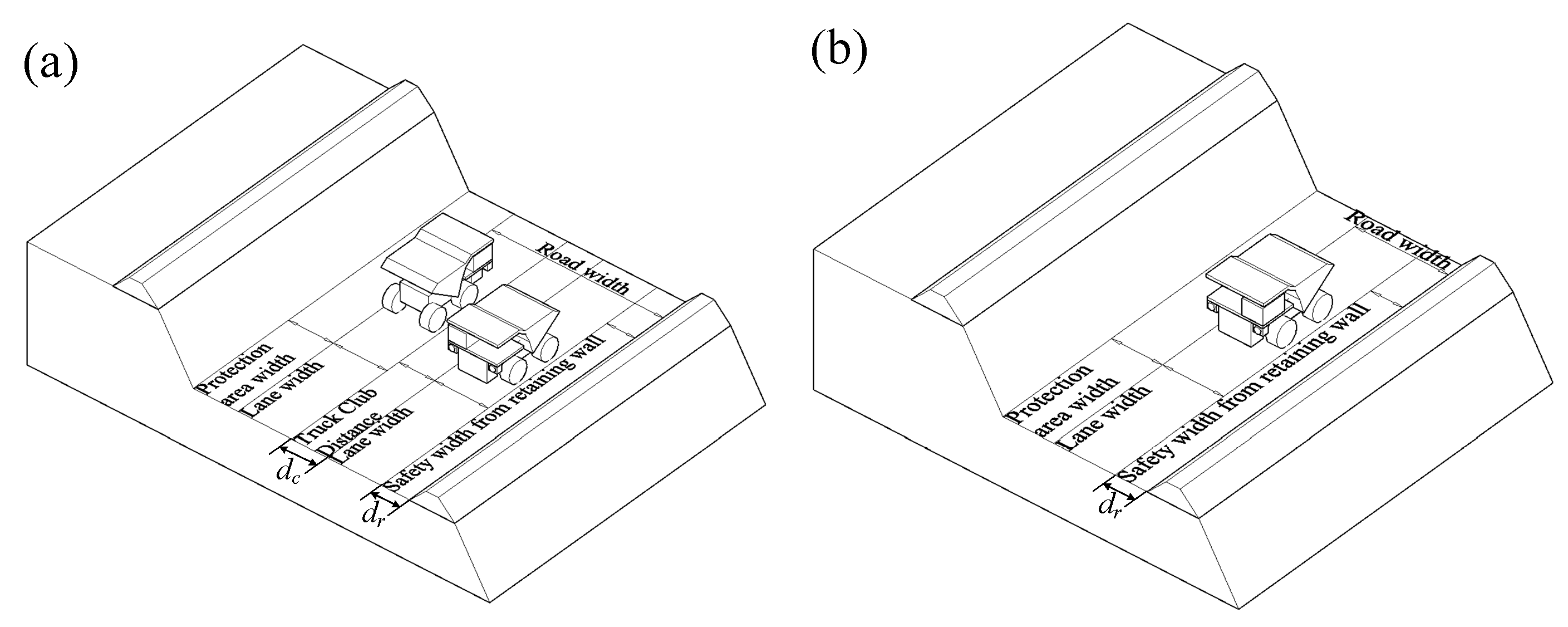
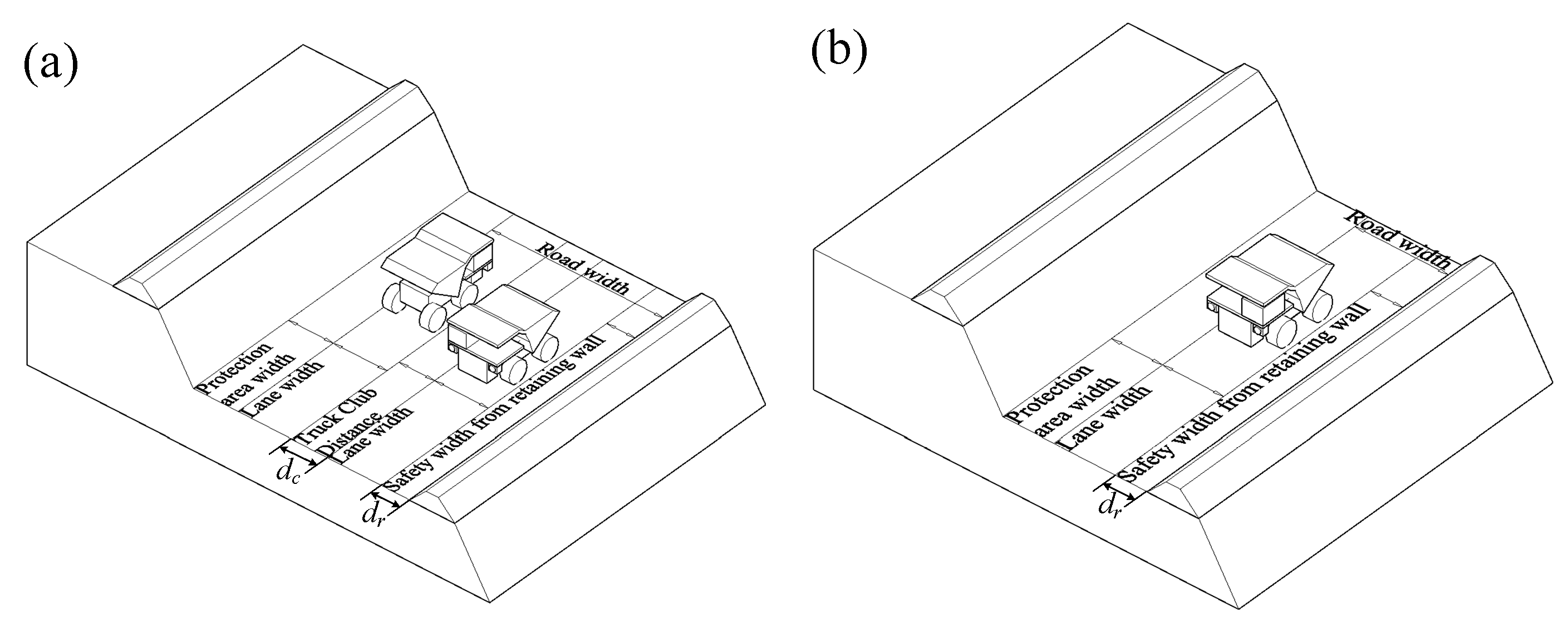
2.1. Open-Pit Mine Road Width Analysis
- (1)
- Travel lanes: The two-lane design includes two mine truck haul roads, which can ensure that two haul trucks pass at the same time, while the single-lane design has only one mine truck haul road.
- (2)
- Retaining walls: A mound of loose stripped material with a profile pattern that is roughly an isosceles trapezoidal shape with a natural buildup.
- (3)
- Protected area: An area that is artificially delineated and located near the inside of a hauling pan to prevent falling rocks from impacting personnel and equipment and causing safety accidents, which is generally closed to traffic.
- (4)
- Lateral safety distance: The main categories are the safe width for trucks meeting on two-lane type transport roads, the safe width between trucks and retaining walls and the width of the protection zone.
2.2. Unmanned Road Analysis
2.3. Optimization of Road Width
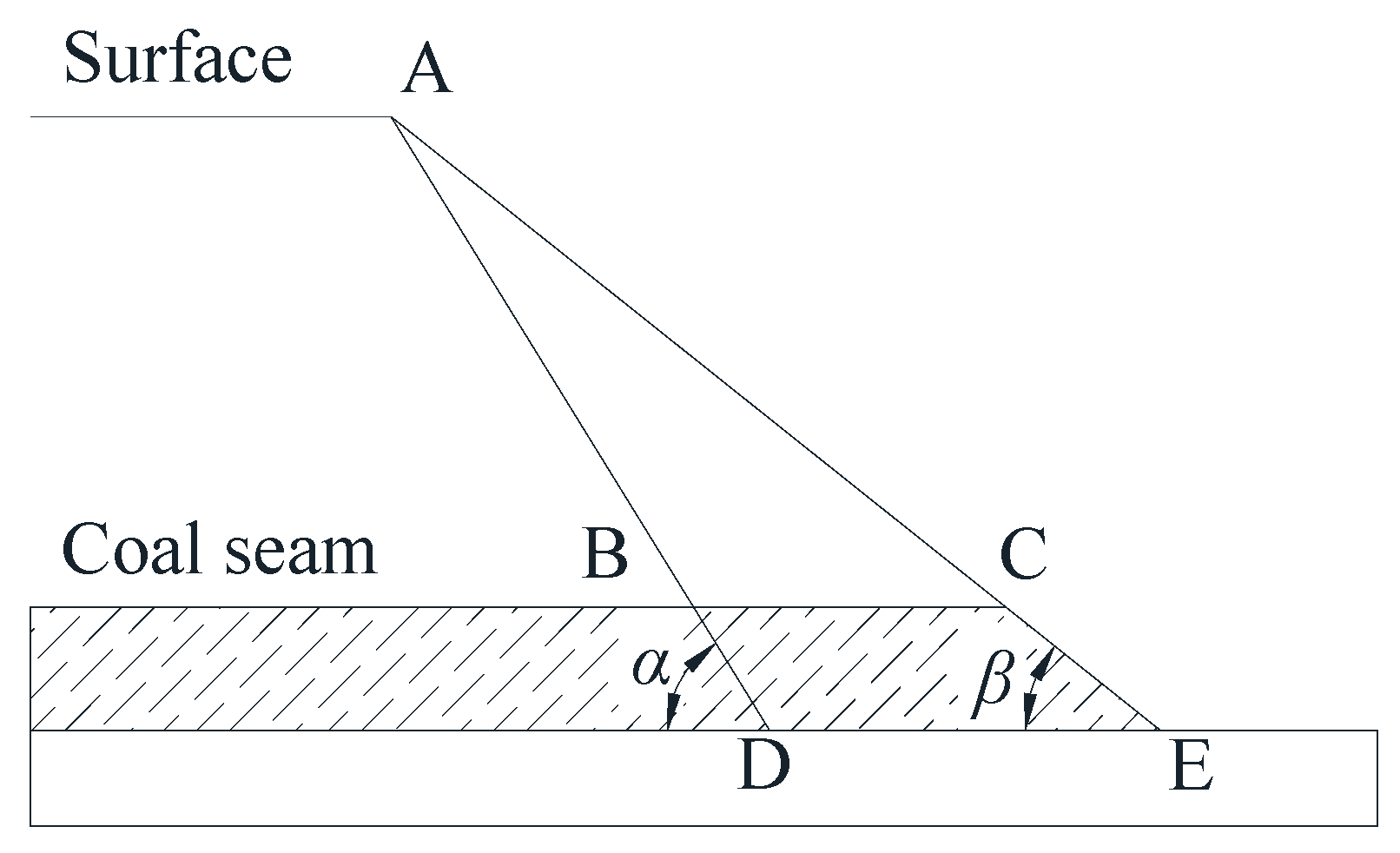
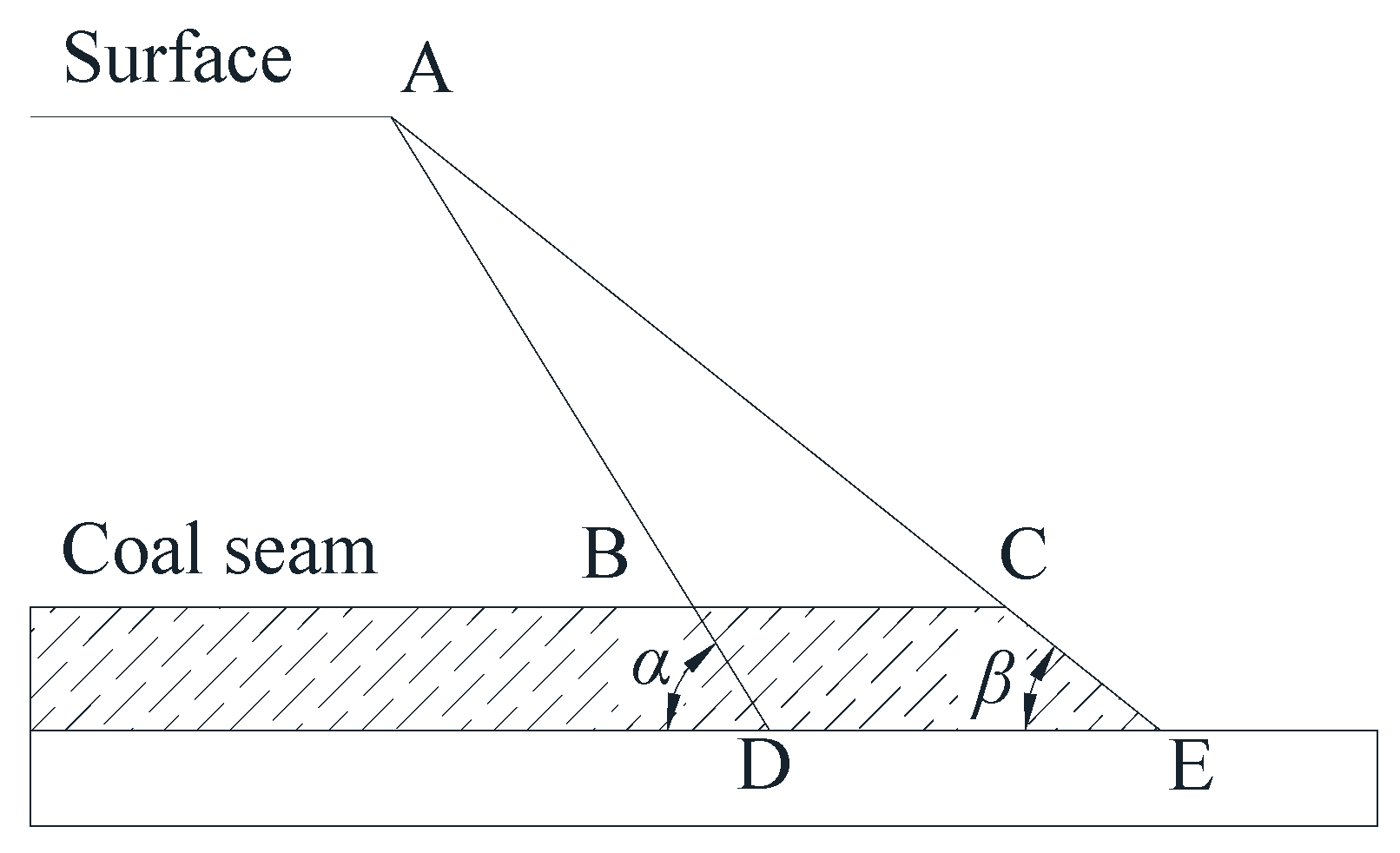
2.4. End-Slope Mining Method
3. Case study and Results
3.1. Analysis of the Return Distance for Lateral Offset of Mining Trucks
3.2. Economic Benefits of Unmanned Road Building
4. Discussion
4.1. Driverless Technology
4.2. Road Design
4.3. Limitations and Future Work
5. Conclusions
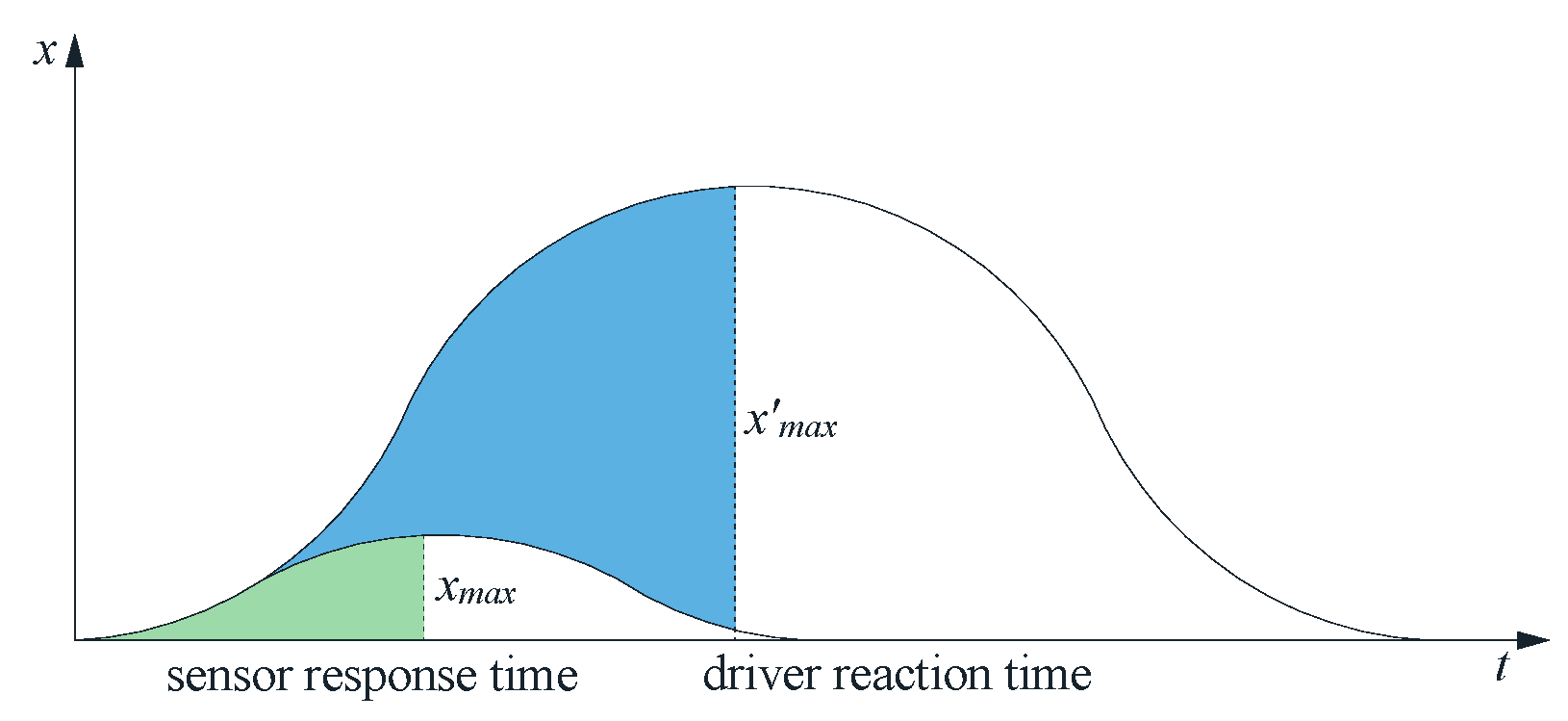
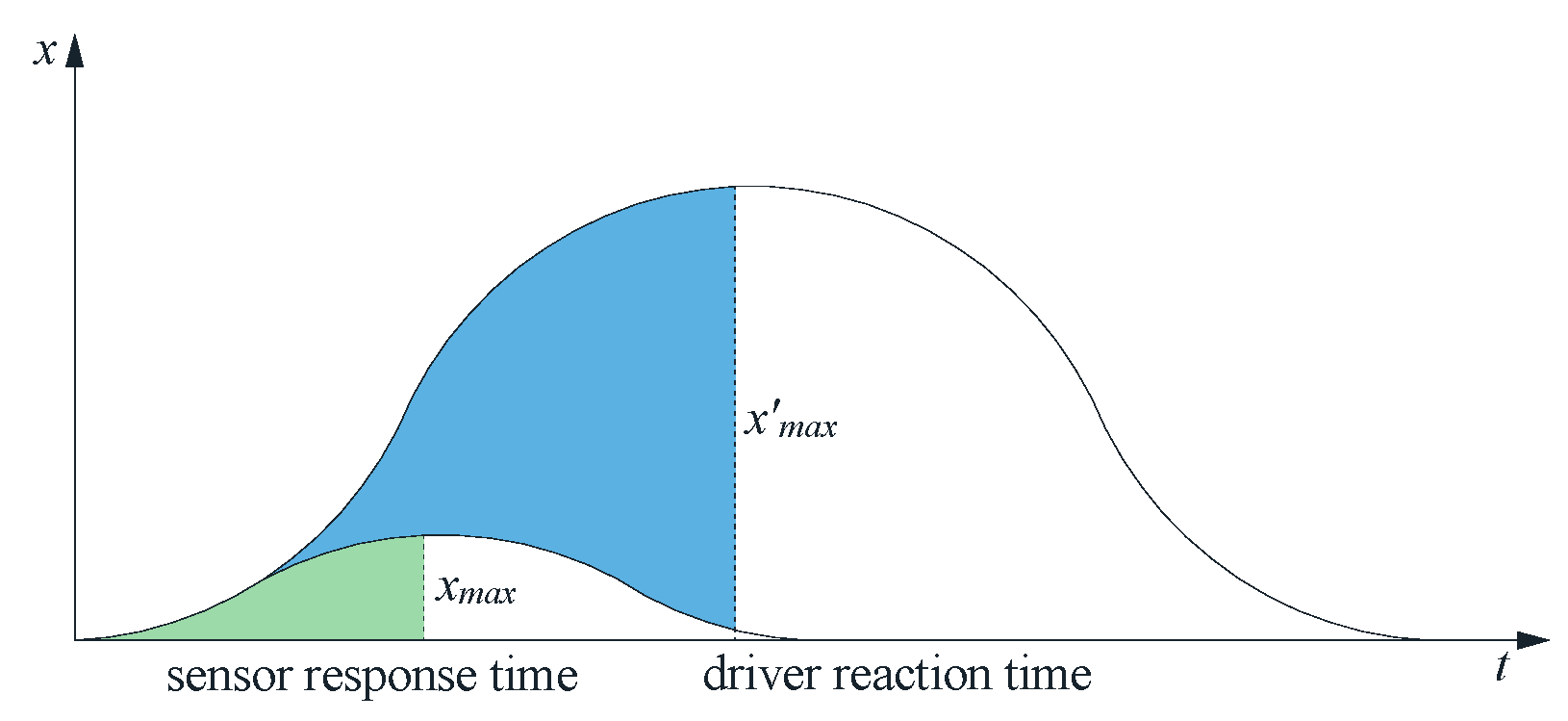
- (1)
- Unmanned vehicles have precise sensing and positioning capabilities, with shorter sensing times and stronger reactive capabilities than human drivers. It is clear that autonomous vehicles can potentially offer a significant advantage over human-driven vehicles in terms of their capability and efficiency. Analyzing the differences between manned and unmanned roads in open-pit mines, we drew the lateral offset back distance curve for mining dump trucks, using the response times of sensors and drivers as independent variables. This curve showed that the corrective distance for manned driving is greater compared to that of unmanned driving.
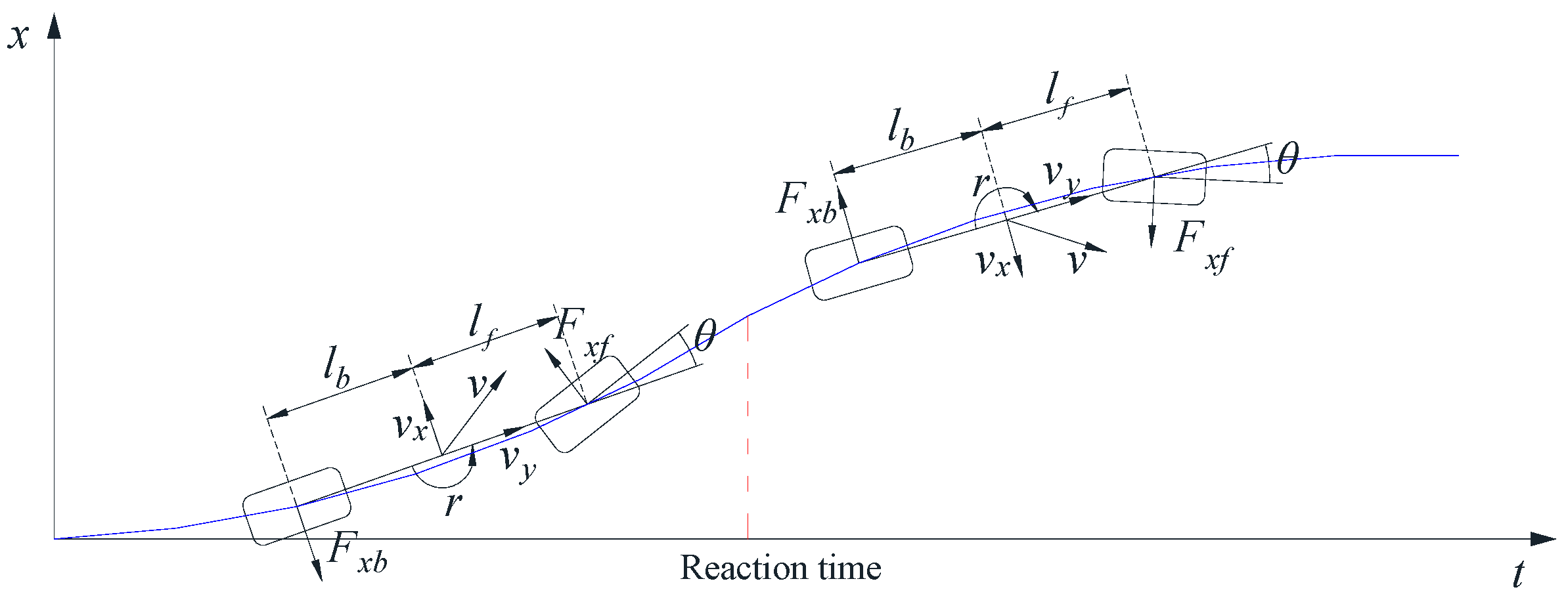
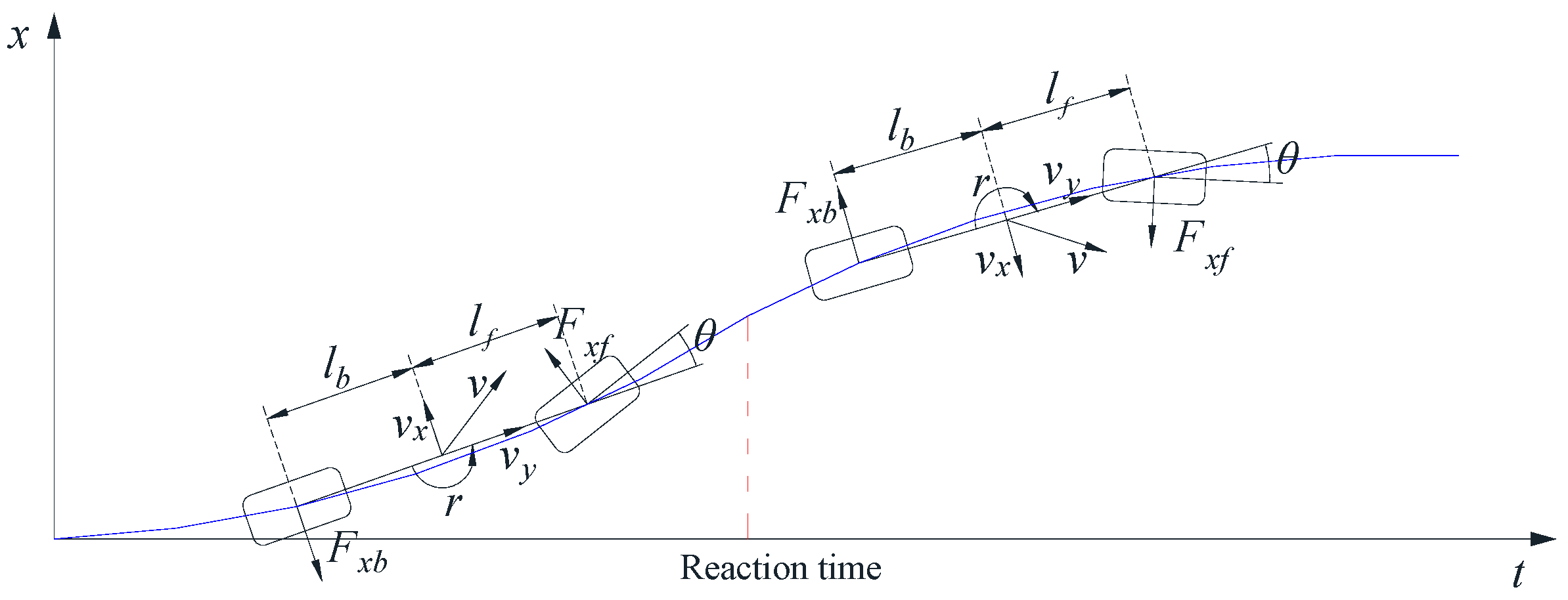
- (2)
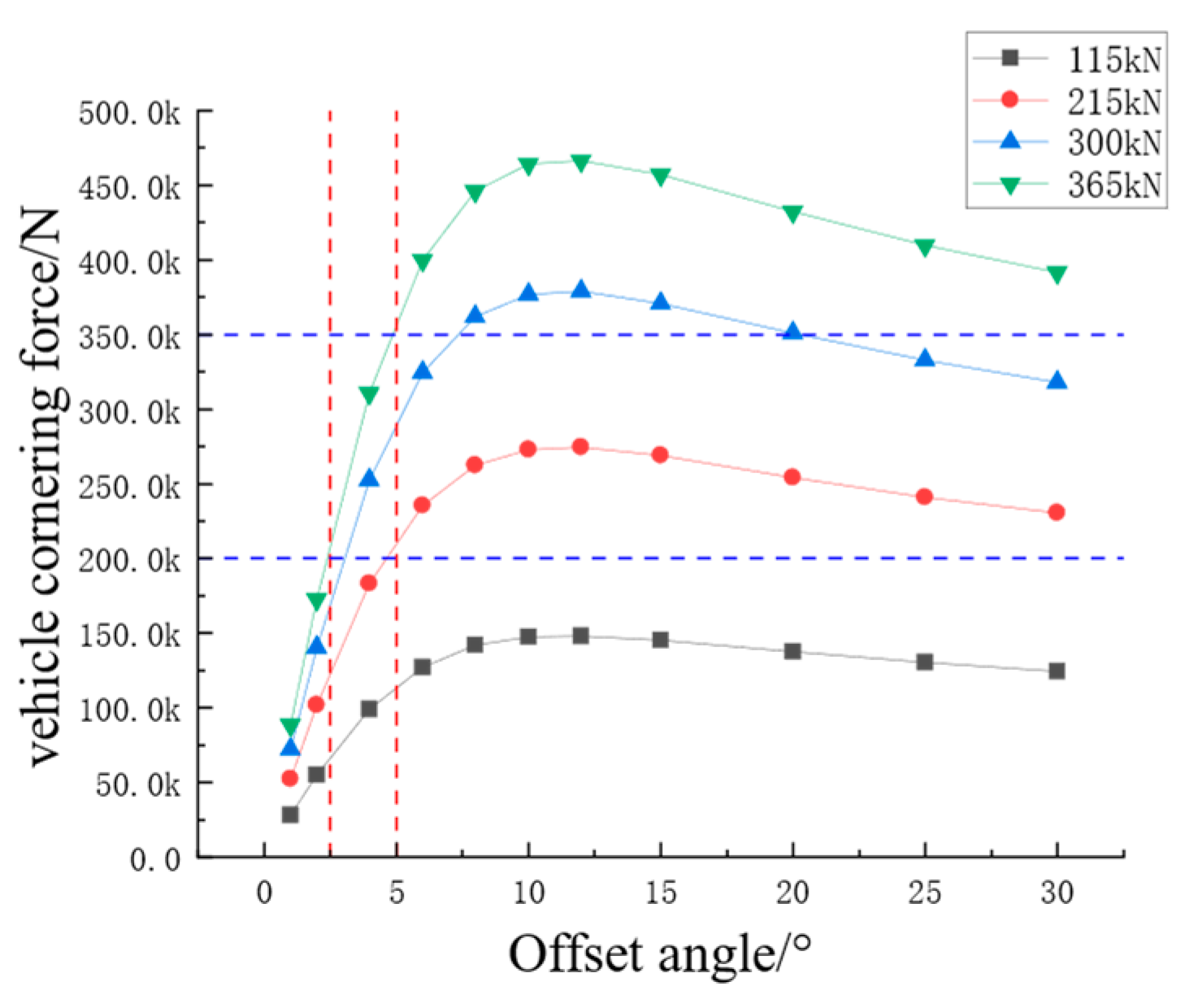
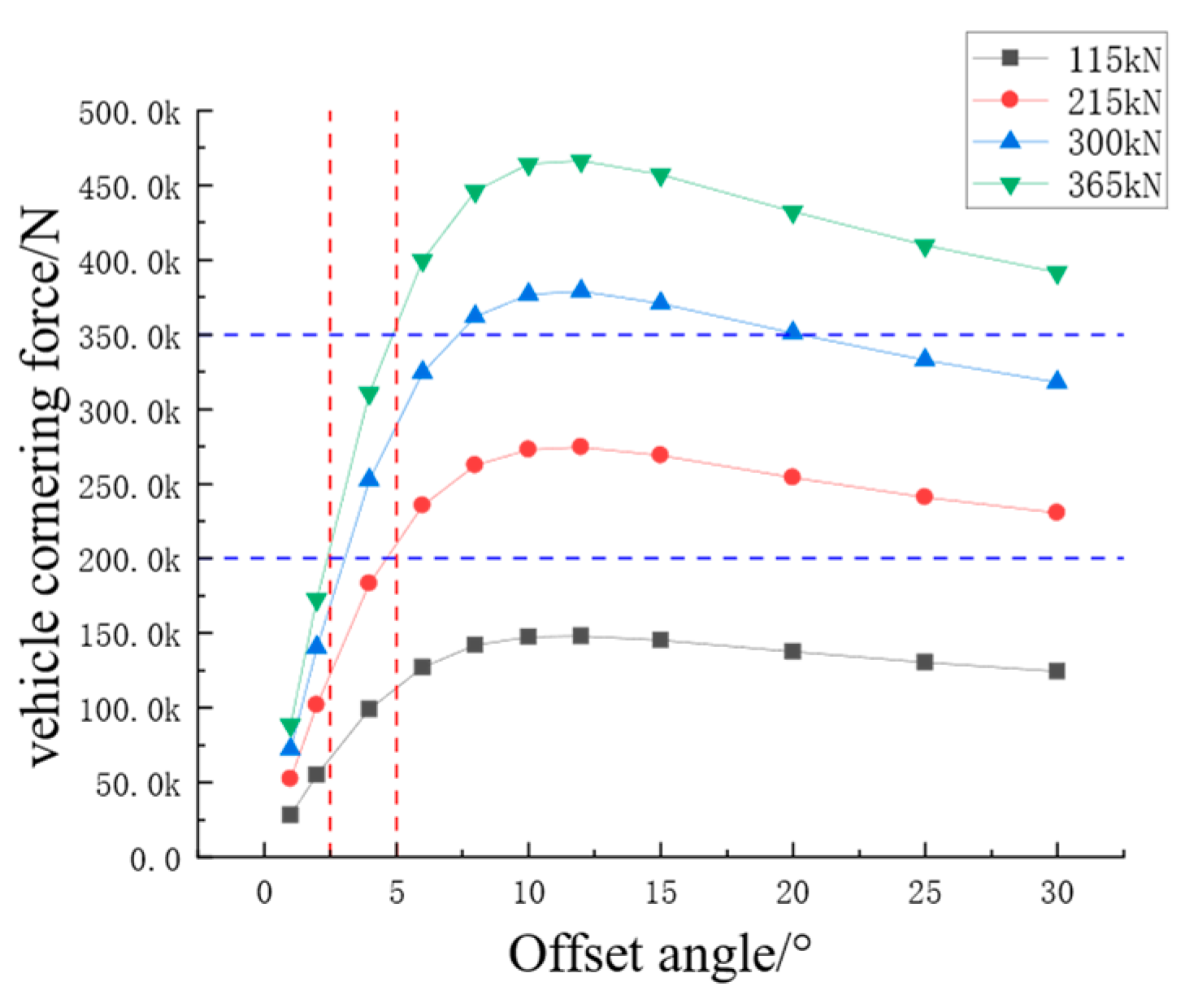
- A model for the dynamics of the lateral offset in vehicles was created to examine the lateral forces on a truck during offset steering. By analyzing the Northern Heavy Industries NTE240 self-driving mining dump truck, it was discovered that the road width of the unilateral transport lane of an unmanned vehicle, which can be optimized for reduction, can be calculated as xop = x′max − xmax = 1743 mm.
- (3)
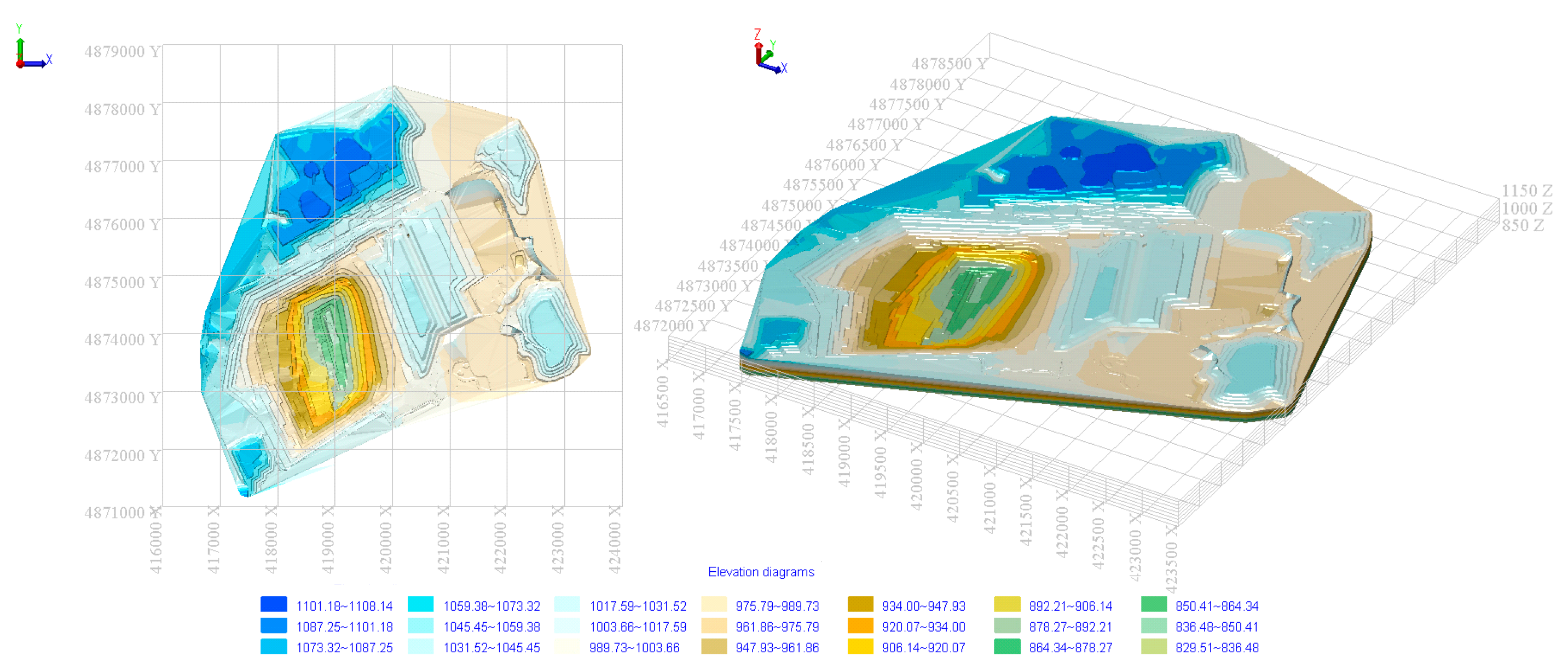
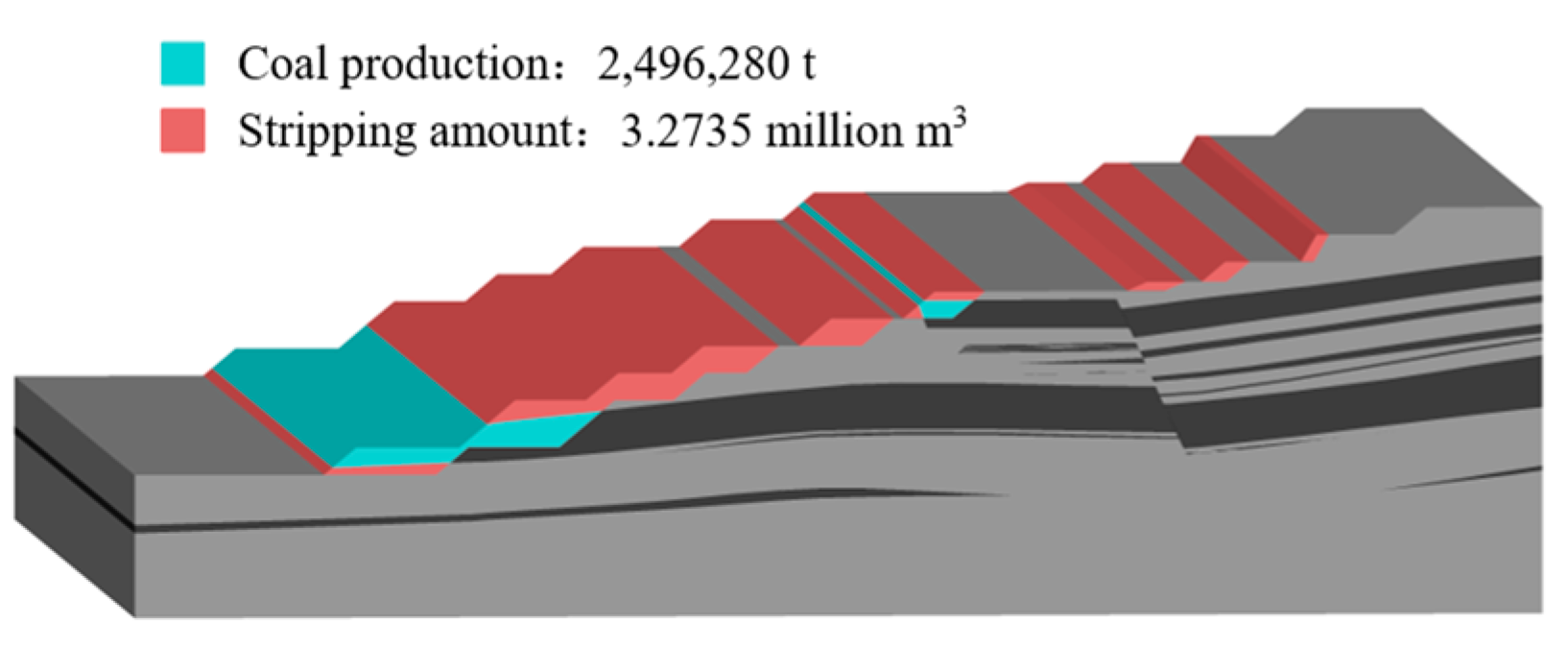
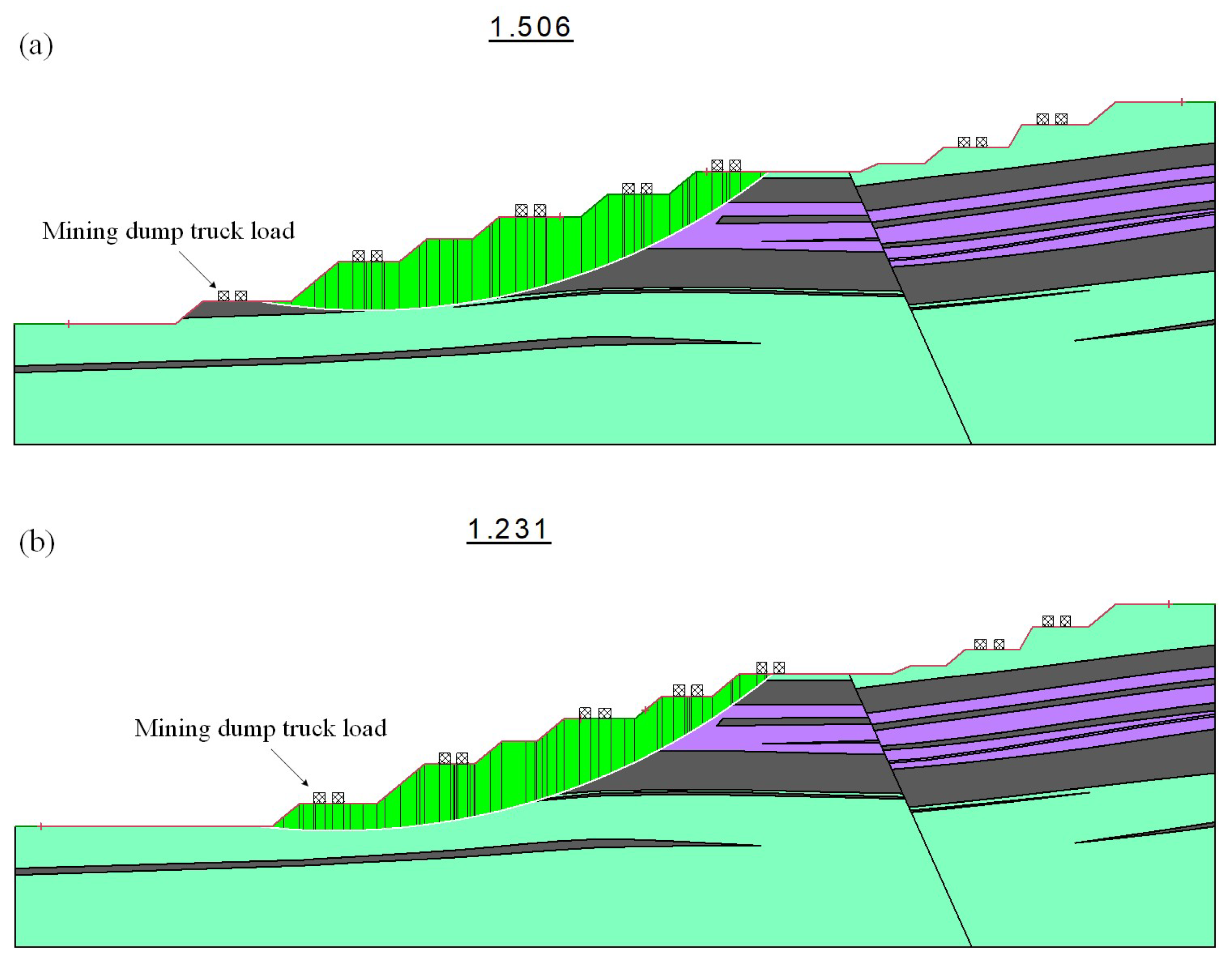
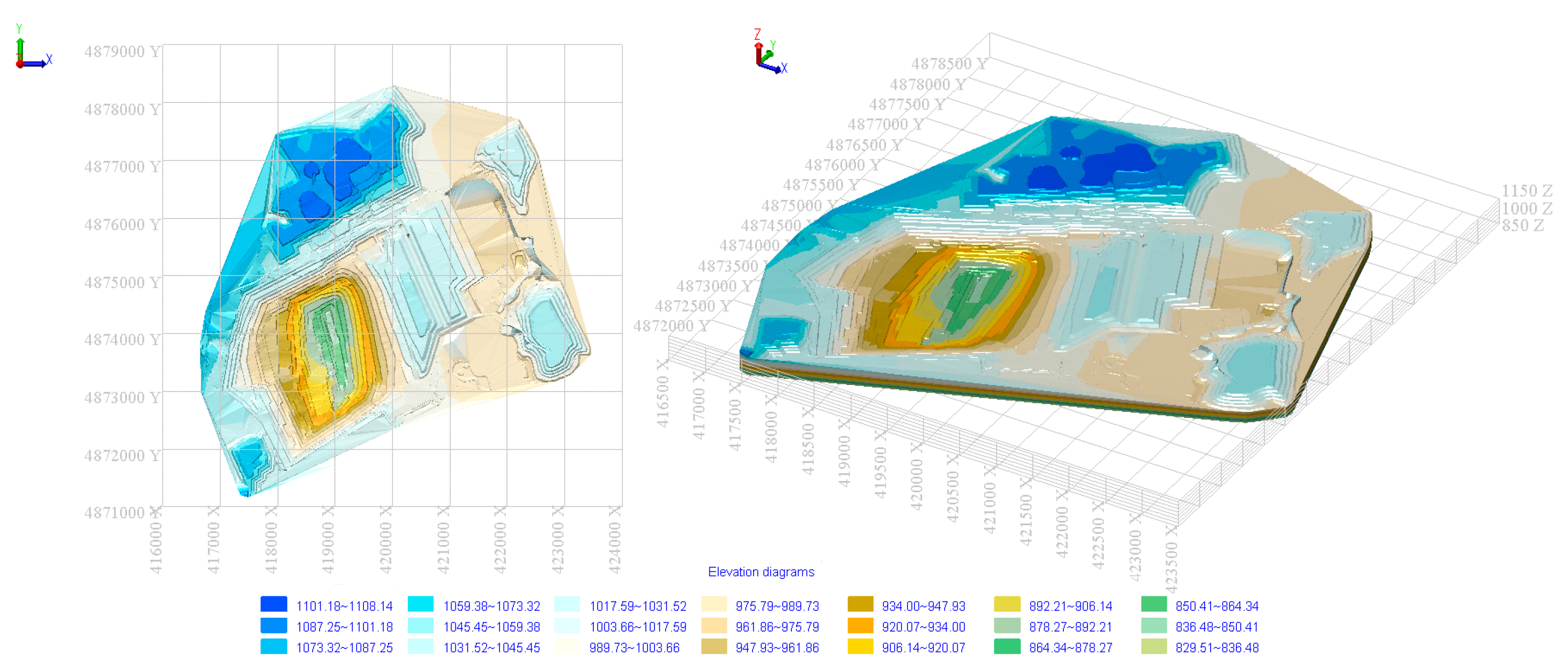
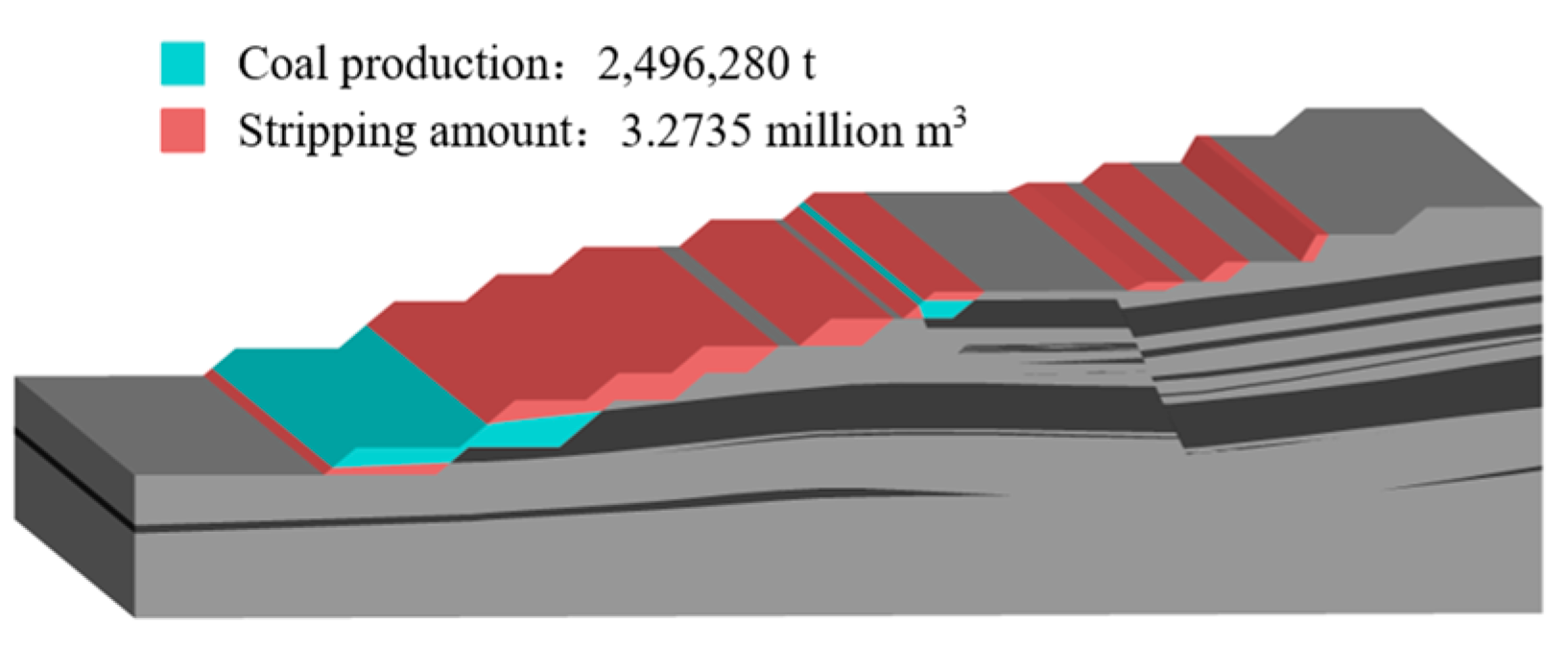
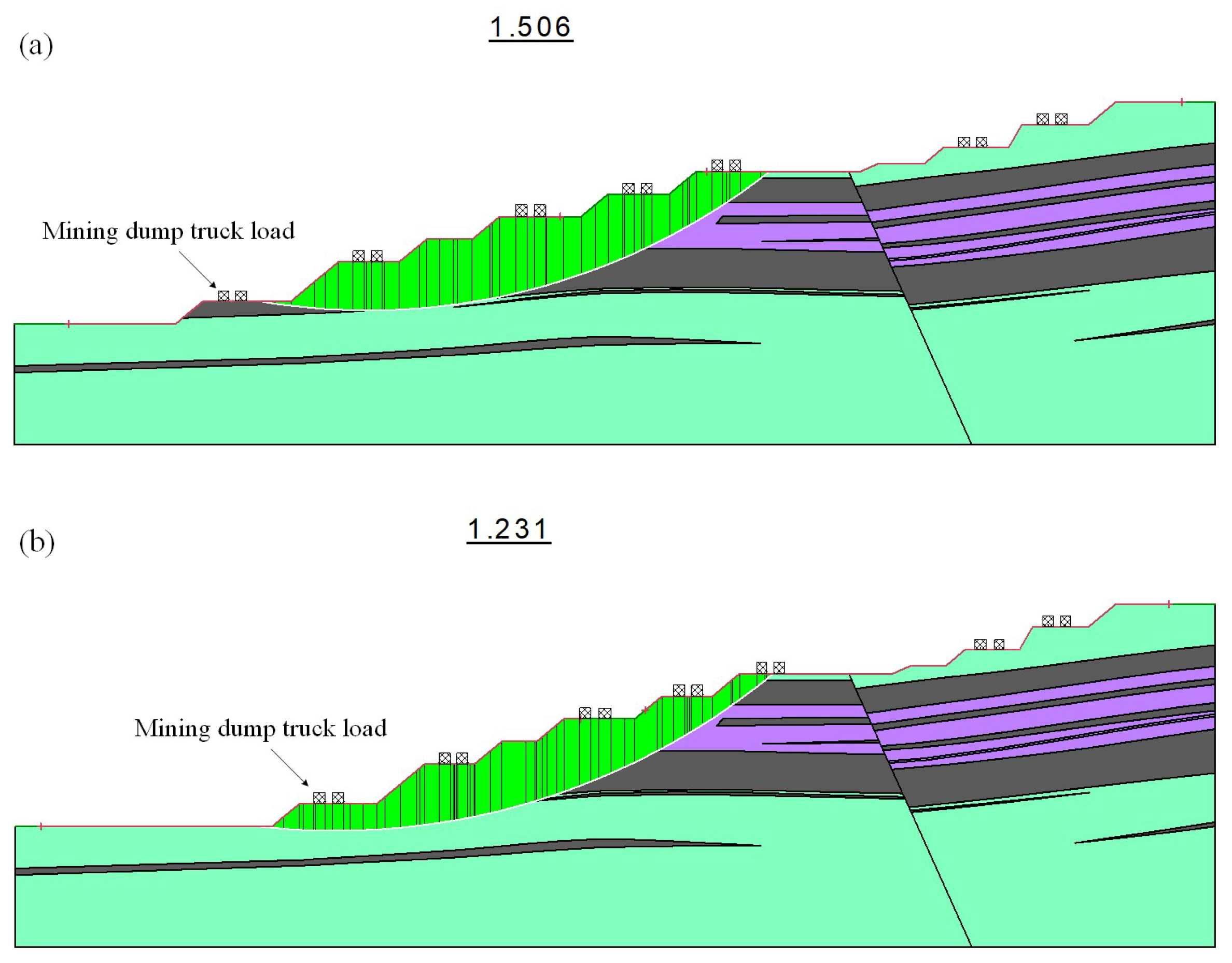
- Using the Shengli West No. 1 Open-Pit Mine as a case study, this paper optimized the angle of the south slope and calculated the resulting economic benefits for end-slope mining. This optimization resulted in a stripping volume of 3,273,500 m3, a coal mining volume of 2,496,280 t, and a stripping ratio of 1.31 m3/t. The analysis examined the slope stability of the southern section before and after optimization, along with the impact of truck loading. The slope stability of the slope post-mining was 1.231, satisfying the specifications and confirming the benefits of optimization.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chang, X.; Li, H.; Rong, J.; Chen, X.; Wang, Y. Determining the appropriate lane width at urban signalised intersections—A case study in beijing. IET Intell. Transp. Syst. 2019, 13, 1785–1791. [Google Scholar] [CrossRef]
- Chen, T.; Sze, N.; Chen, S.; Labi, S. Urban road space allocation incorporating the safety and construction cost impacts of lane and footpath widths. J. Saf. Res. 2020, 75, 222–232. [Google Scholar] [CrossRef] [PubMed]
- Bellamy, D.; Pravica, L. Assessing the impact of driverless haul trucks in Australian surface mining. Resour. Policy 2011, 36, 149–158. [Google Scholar] [CrossRef]
- Kim, D.J.; Bae, J.I.; Lee, K.S.; Lee, D.S.; Leeand, Y.J.; Lee, M.H. Position Recognition System of Autonomous Vehicle via Kalman Filtering. In Proceedings of the Sixteenth International Symposium on Artificial Life and Robotics (AROB 16TH ‘11), Beppu, Japan, 27–29 January 2011; pp. 834–837. [Google Scholar]
- Wang, D.; Zheng, S.; Ren, Y.; Du, D. Path Planning Based on the Improved RRT* Algorithm for the Mining Truck. CMC-Comput. Mater. Contin. 2022, 71, 3571–3587. [Google Scholar] [CrossRef]
- Xiao, D.; Yan, Z.; Li, J.; Gu, Z.; Fu, Y.; Yin, L. Road Extraction From Point Clouds of Open-Pit Mine Using LPFE-Net. IEEE Geosci. Remote Sens. Lett. 2023, 20, 6501005. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z. Route Control and Behavior Decision of Intelligent Driverless Truck Based on Artificial Intelligence Technology. Wirel. Commun. Mob. Comput. 2022, 2022, 7025081. [Google Scholar] [CrossRef]
- Ahumada, G.I.; Pintoand, J.D.; Herzog, O. A Dynamic Scheduling Multiagent System for Truck Dispatching in Open-Pit Mines. Agents and Artificial Intelligence, ICAART 2020. In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART); Rocha, A.P., Steels, L., VanDenHerik, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Postoyev, G.P.; Kazeev, A.I.; Kuchukov, M.M. The Coulomb-Mohr Law and the Change in the Stress-Strain State of a Landslide Prone Mass. Dokl. Earth Sci. 2022, 507 (Suppl. 1), S216–S224. [Google Scholar] [CrossRef]
- Liu, H.; Pan, W.; Hu, Y.; Li, C.; Yuan, X.; Long, T. A Detection and Tracking Method Based on Heterogeneous Multi-Sensor Fusion for Unmanned Mining Trucks. Sensors 2022, 22, 5989. [Google Scholar] [CrossRef] [PubMed]
- Hong, C.; Guo, Y.; Wang, Y.; Li, T. The integrated scheduling optimization for container handling by using driverless electric truck in automated container terminal. Sustainability 2023, 15, 5536. [Google Scholar] [CrossRef]
- Yu, J.J.Q. Two-Stage Request Scheduling for Autonomous Vehicle Logistic System. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1917–1929. [Google Scholar] [CrossRef]
- Zamora-Cadenas, L.; Velez, I.; Sierra-Garcia, J.E. UWB-Based Safety System for Autonomous Guided Vehicles without Hardware on the Infrastructure. IEEE Access 2021, 9, 96430–96443. [Google Scholar] [CrossRef]
- Mecheri, S.; Rosey, F.; Lobjois, R. The effects of lane width, shoulder width, and road cross-sectional reallocation on drivers’ behavioral adaptations. Accid. Anal. Prev. 2017, 104, 65–73. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.K.; Torrione, P.A.; Collinsand, L.M.; Morton, K.D. Rapid Position Estimation and Tracking for Autonomous Driving. Unmanned systems technology XIV. In Proceedings of the Conference on Unmanned Systems Technology XIV; Karlsen, R.E., Gage, D.W., Shoemaker, C.M., Gerhart, G.R., Eds.; SPIE: Baltimore, MD, USA, 2012. [Google Scholar]
- Liu, Q.; Li, X.; Yuan, S.; Li, Z. Decision-Making Technology for Autonomous Vehicles: Learning-Based Methods, Applications and Future Outlook. In Proceedings of the 2021 IEEE Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021. [Google Scholar]
- Zheng, R.; Nakano, K.; Yamabe, S.; Aki, M.; Nakamura, H.; Suda, Y. Study on Emergency-Avoidance Braking for the Automatic Platooning of Trucks. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1748–1757. [Google Scholar] [CrossRef]
- Shukla, S.; Kasarapu, S.; Hasan, R.; Manoj, P.D.S.; Shen, H.Y.; IEEE. UBOL: User-Behavior-Aware One-Shot Learning for Safe Autonomous Driving. In Proceedings of the 2022 Fifth International Conference on Connected and Autonomous Driving (MetroCAD 2022), Detroit, MI, USA, 28–29 April 2022. [Google Scholar]
- Zhang, S.; Lu, C.; Jiang, S.; Shan, L.; Xiong, N.N. An Unmanned Intelligent Transportation Scheduling System for Open-Pit Mine Vehicles Based on 5G and Big Data. IEEE Access 2020, 8, 135524–135539. [Google Scholar] [CrossRef]
- Tannant, D.; Regensburg, B. Guidelines for Mine Haul Road Design; University of British Columbia Library: Vancouver, BC, Canada, 2010; pp. 1–111. [Google Scholar]
- Zhang, D.M.; Yin, G.Z.; Chen, J.A.; Dai, G.F. Stability Analysis of Multi-step Anti-tilt Slope at Open-pit Mine. Disaster Adv. 2010, 3, 30–34. [Google Scholar]
- Yang, W.; Yang, J.; Liang, J.; Zhang, N. Implementation of velocity optimisation strategy based on preview road information to trade off transport time and fuel consumption for hybrid mining trucks. IET Intell. Transp. Syst. 2019, 13, 194–200. [Google Scholar] [CrossRef]
- Wo, X.; Li, G.; Sun, Y.; Li, J.; Yang, S.; Hao, H. The Changing Tendency and Association Analysis of Intelligent Coal Mines in China: A Policy Text Mining Study. Sustainability 2022, 14, 11650. [Google Scholar] [CrossRef]
- Xu, X.; Wang, Z.; Huang, P.; Tian, S.; Bi, L. Open-Pit Map: An HD Map Data Model for Open-Pit Mines. Appl. Sci. 2023, 13, 12681. [Google Scholar] [CrossRef]
- Guo, Z.; Liu, F.; Shang, Y.; Li, Z.; Qin, P. Longitudinal and lateral stability control for autonomous vehicles in curved road scenarios with road undulation. Eng. Comput. 2023, 40, 2814–2840. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, C.; Gu, Z.; Tang, C.; Zhu, Z.; Zhang, Y.; Qian, J.; Li, X. Obstacle avoidance for trackless rubber-tired vehicle based on risk-grid particle swarm optimization in confined space of deep well. IEEE Trans. Veh. Technol. 2023, 72, 11291–11303. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Advantages | Disadvantages |
|---|---|
| No blind spots, more accurate judgement of distances | Highly affected by bad weather and complicated road conditions |
| Faster and more accurate responses to unexpected situations | Cannot understand some of the potential rules of the road, such as accelerating or decelerating as quickly as possible to avoid parallel driving |
| Never get tired and work more efficiently |
| Description | Value |
|---|---|
| Rated load capacity | 220~236 t |
| Loading volume | 114 m3 |
| Maximum speed | 64 km/h |
| Minimum turning radius | 15.2 m |
| Loading height | 6600 mm |
| Overall length | 14,800 mm |
| Overall width | 7640 mm |
| Total height | 7300 mm |
| Unladen mass | 150 t |
| Distance from the center of the front axle to the center of mass | 3.27 m |
| Distance from center of the shaft to center of mass after no load | 2.93 m |
| Rock Formation | Cohesion/kPa | Internal Friction Angle/° | Density/kN∙m−3 |
|---|---|---|---|
| Quaternary | 18 | 22~24 | 16.5 |
| Mudstone | 20 | 20~22 | 19.3 |
| Siltstone | 50 | 24~26 | 20.3 |
| Coal | 40 | 22~27 | 13.8 |
| Mudstone with sandstone interbedded | 20 | 20~23 | 20.0 |
| Middle conglomerate | 15 | 22~24 | 21.0 |
| Siltstone mudstone | 20 | 21~23 | 20.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Liu, P. Design of Unmanned Road Widths in Open-Pit Mines Based on Offset Reaction Times. Appl. Sci. 2024, 14, 2995. https://doi.org/10.3390/app14072995
Han L, Liu P. Design of Unmanned Road Widths in Open-Pit Mines Based on Offset Reaction Times. Applied Sciences. 2024; 14(7):2995. https://doi.org/10.3390/app14072995
Chicago/Turabian StyleHan, Liu, and Peng Liu. 2024. "Design of Unmanned Road Widths in Open-Pit Mines Based on Offset Reaction Times" Applied Sciences 14, no. 7: 2995. https://doi.org/10.3390/app14072995
APA StyleHan, L., & Liu, P. (2024). Design of Unmanned Road Widths in Open-Pit Mines Based on Offset Reaction Times. Applied Sciences, 14(7), 2995. https://doi.org/10.3390/app14072995