
Cable-Driven Mechanism Models for Sensitive and Actuated Minimally Invasive Robotic Instruments

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Modeling of Sensitive Cable-Driven Mechanisms
2.1. Cable-Driven Sensitive Models
2.2. General Algorithms and Formulations
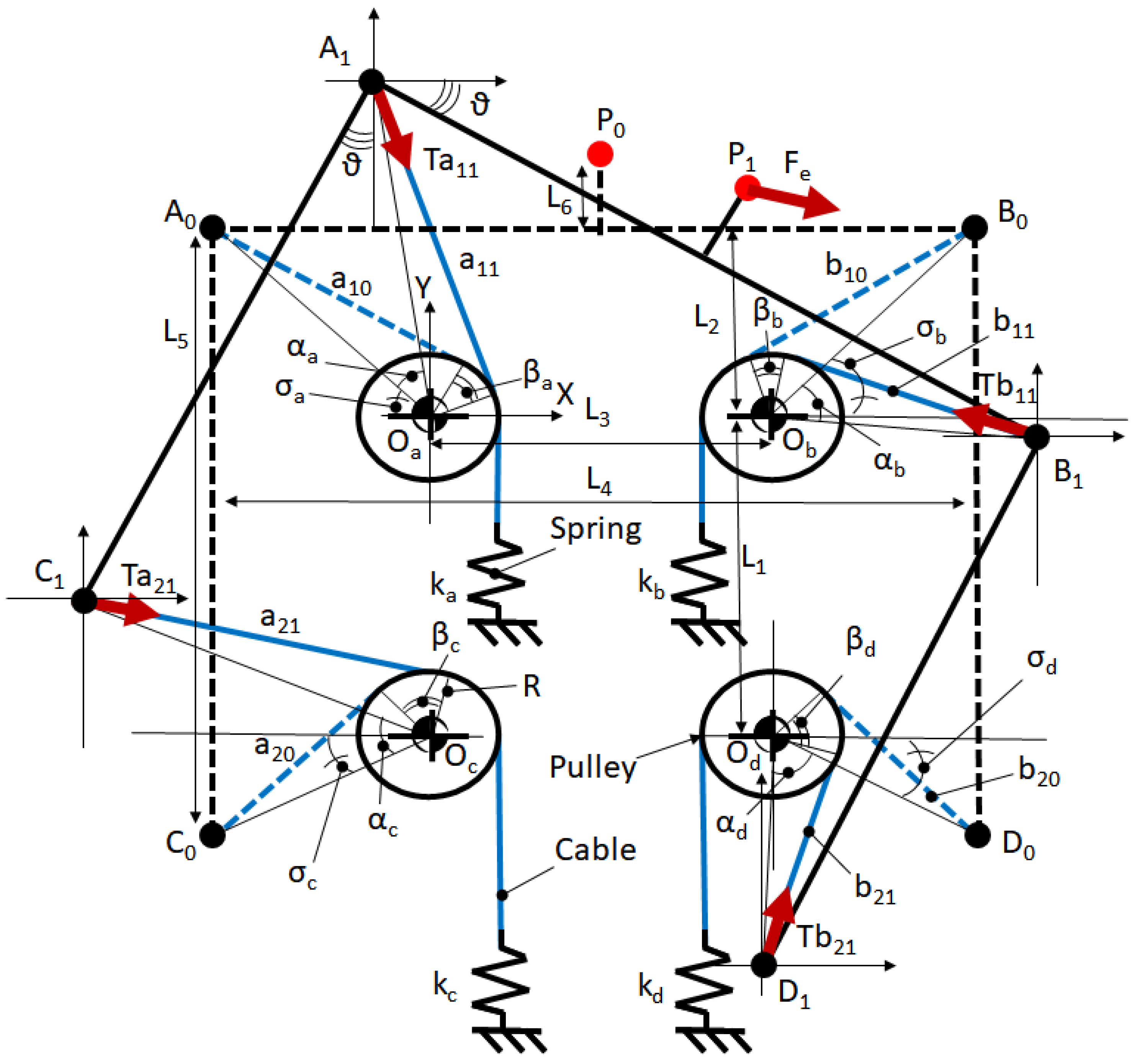
2.3. Modeling of the Mechanism Model MM1
- , , , are tensions on four cables in the starting position of the mobile part;
- , , , are tensions on four cables in the new configuration of the mobile part;
- , , , are lengths of the cables in the starting configuration from points , , , to each tangent of the pulleys centered in , , , ;
- , , , are lengths of the cables in the new configuration, calculated from the points , , , , respectively, to each tangent of the pulleys centered in , , , ;
- R is the radius of the pulleys;
- , , , , , are the dimensions of the whole system shown in Figure 8;
- , , , , , , , , , , , are the angles shown in Figure 8;
- , , , are the equivalent stiffness coefficients of the springs and cables in the series;
- , , , are displacements of the springs from the starting position to the new balancing configuration;
- , , , are displacements of springs in the starting configuration for preloading;
- is the mass of the mobile part;
- g is gravity.
- 1
- All frictions between the cables and pulleys, and pulleys and the shafts of pulleys are zero;
- 2
- ;
- 3
- .
2.4. Comparison between MM1 and MM2 Models
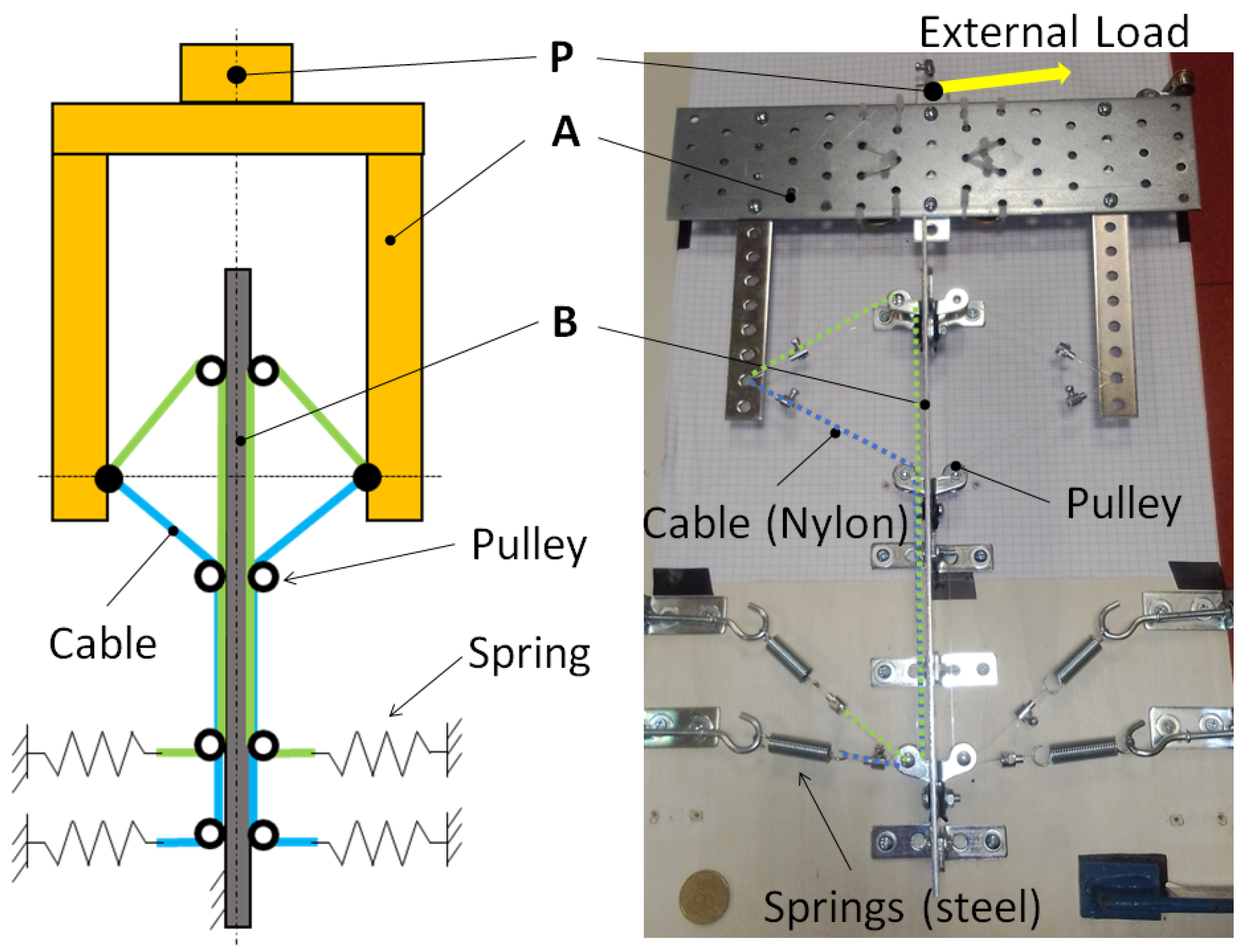
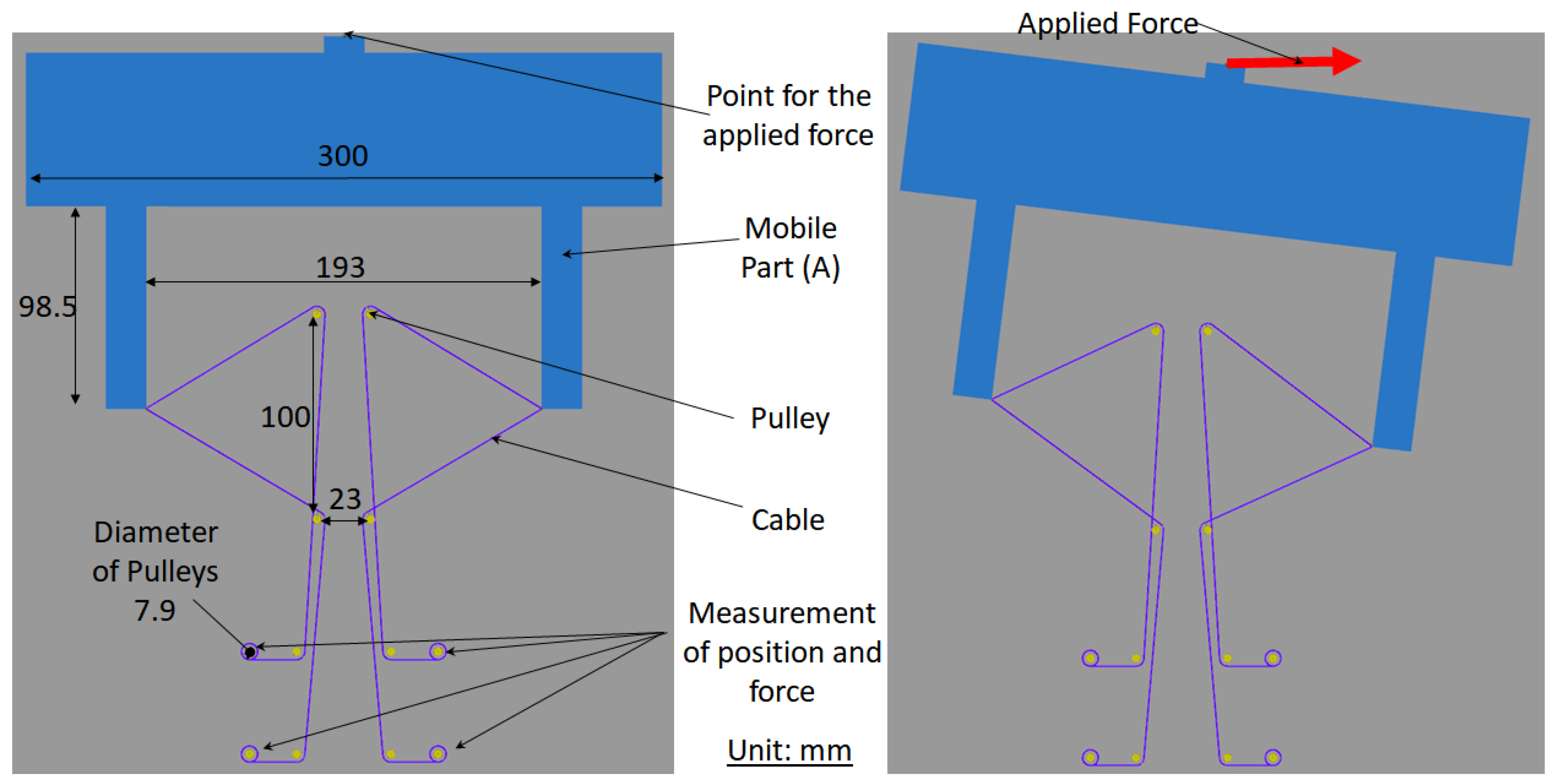
3. Physical Implementation of MM2
3.1. Test Benches for MM2
3.2. Procedure for Experimentation
- 1
- Connection of cables with the mobile part;
- 2
- Connection of cables with springs, passing around the pulleys (or holes);
- 3
- Calibration of the mechanism in the initial position by using screws;
- 4
- Measurement of the length of springs;
- 5
- Application of loads connected (by a cable) to point P;
- 6
- Measurement of the new length of springs;
- 7
- Measurement of the displacement of point P.
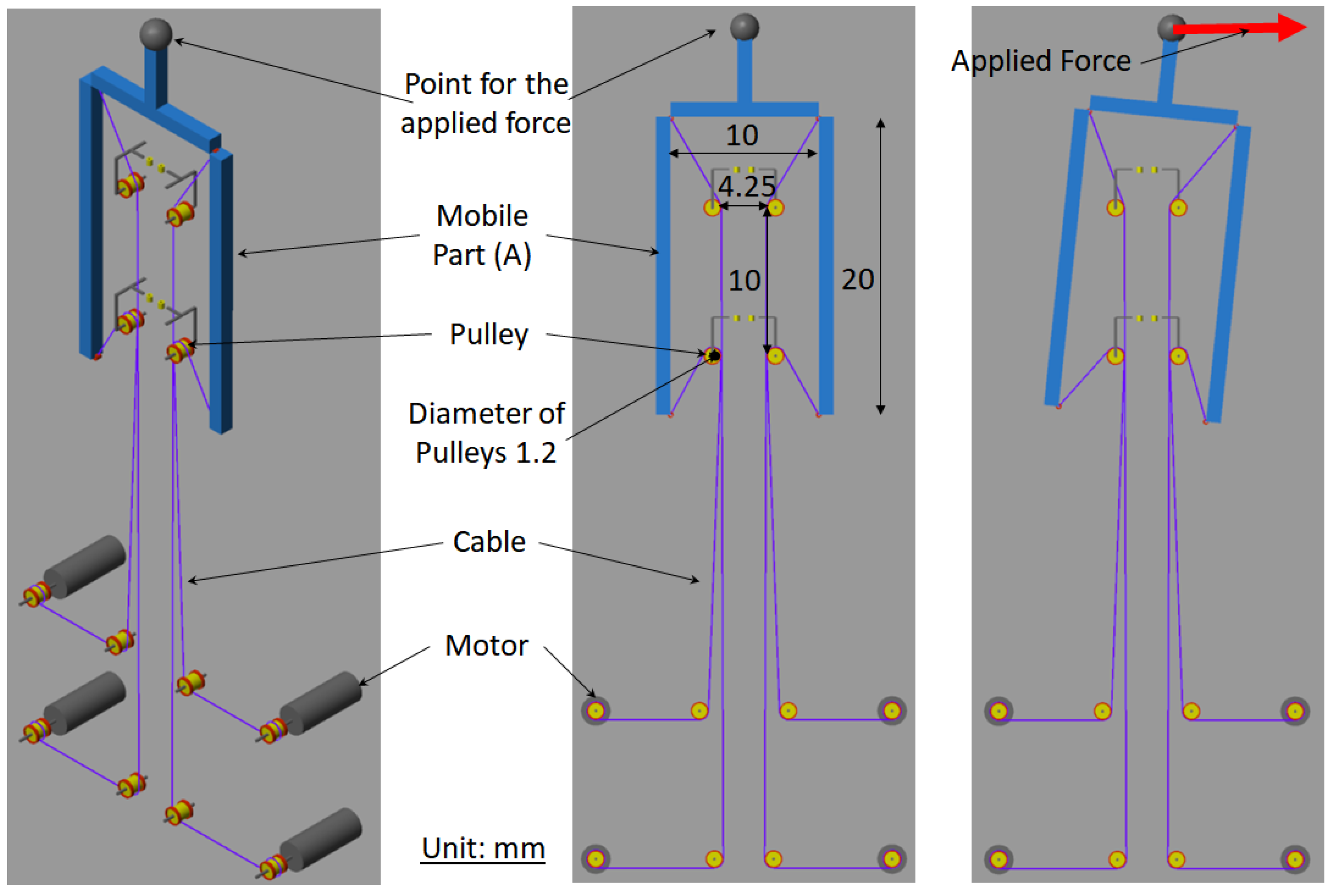
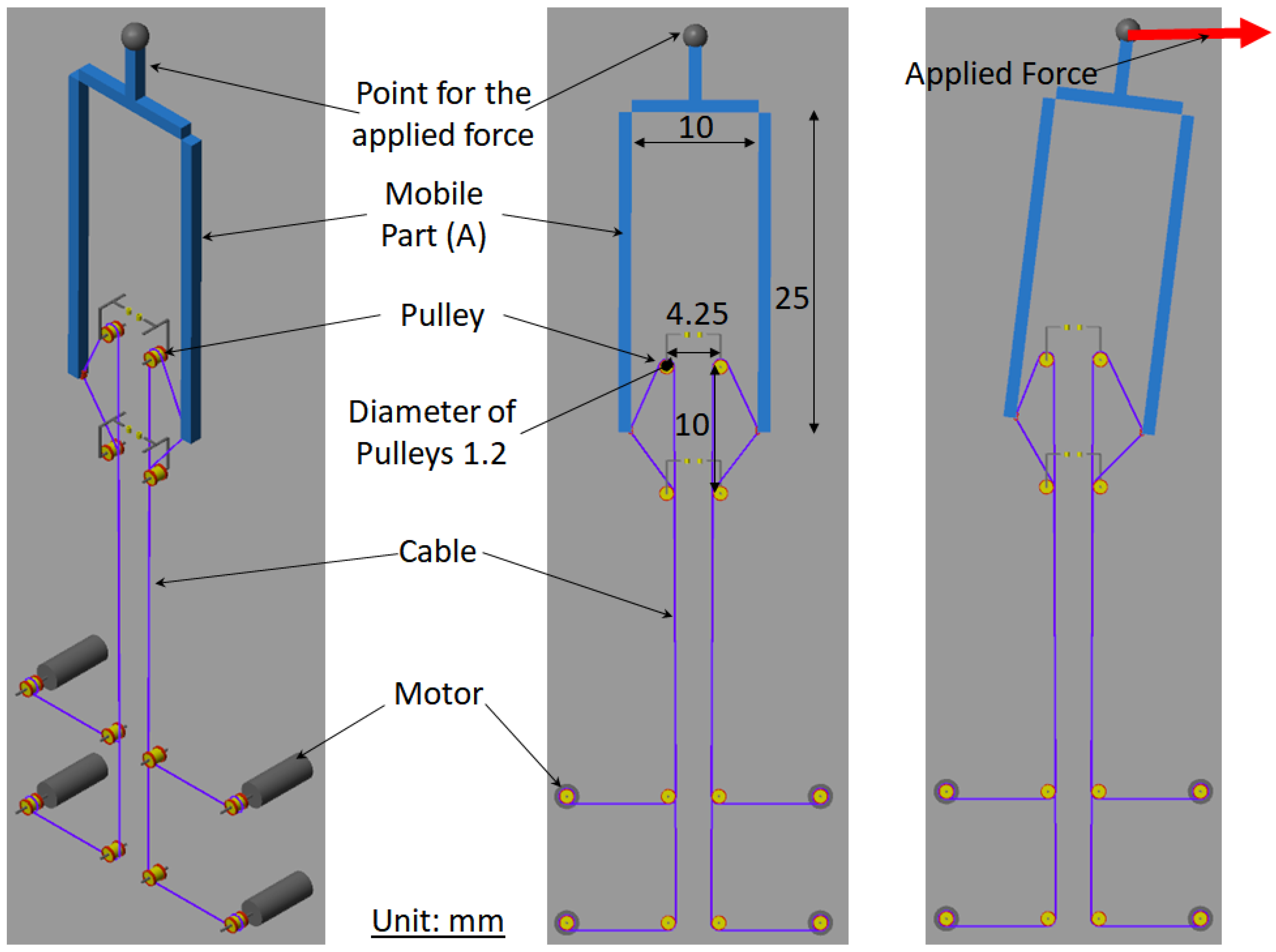
4. Multibody Design and Control of MM1 and MM2
4.1. Design of Multi-Body Models
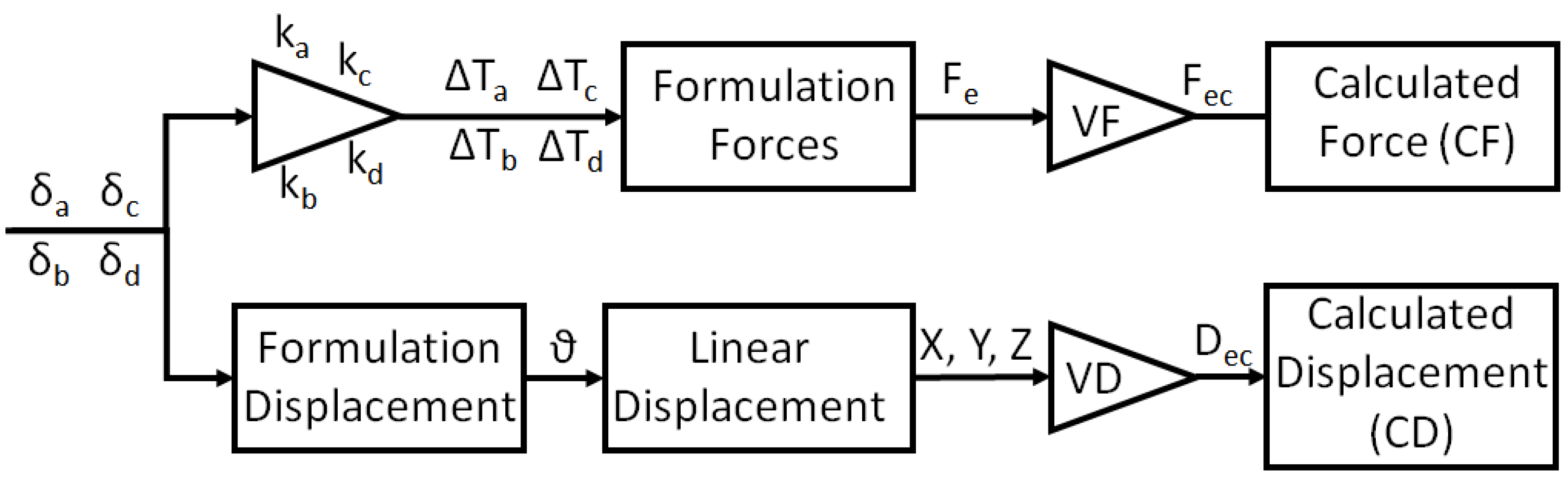
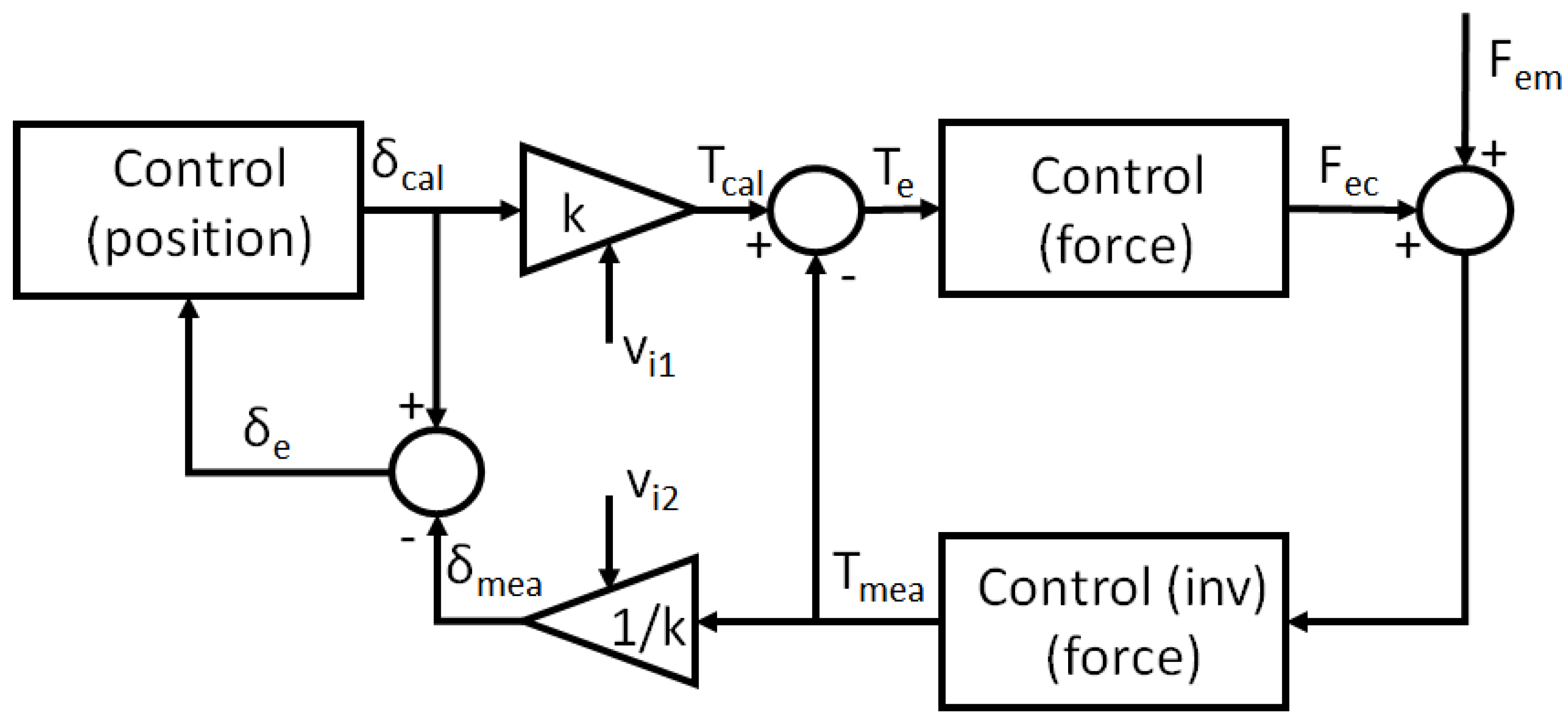
4.2. General Control Architectures for Each Model
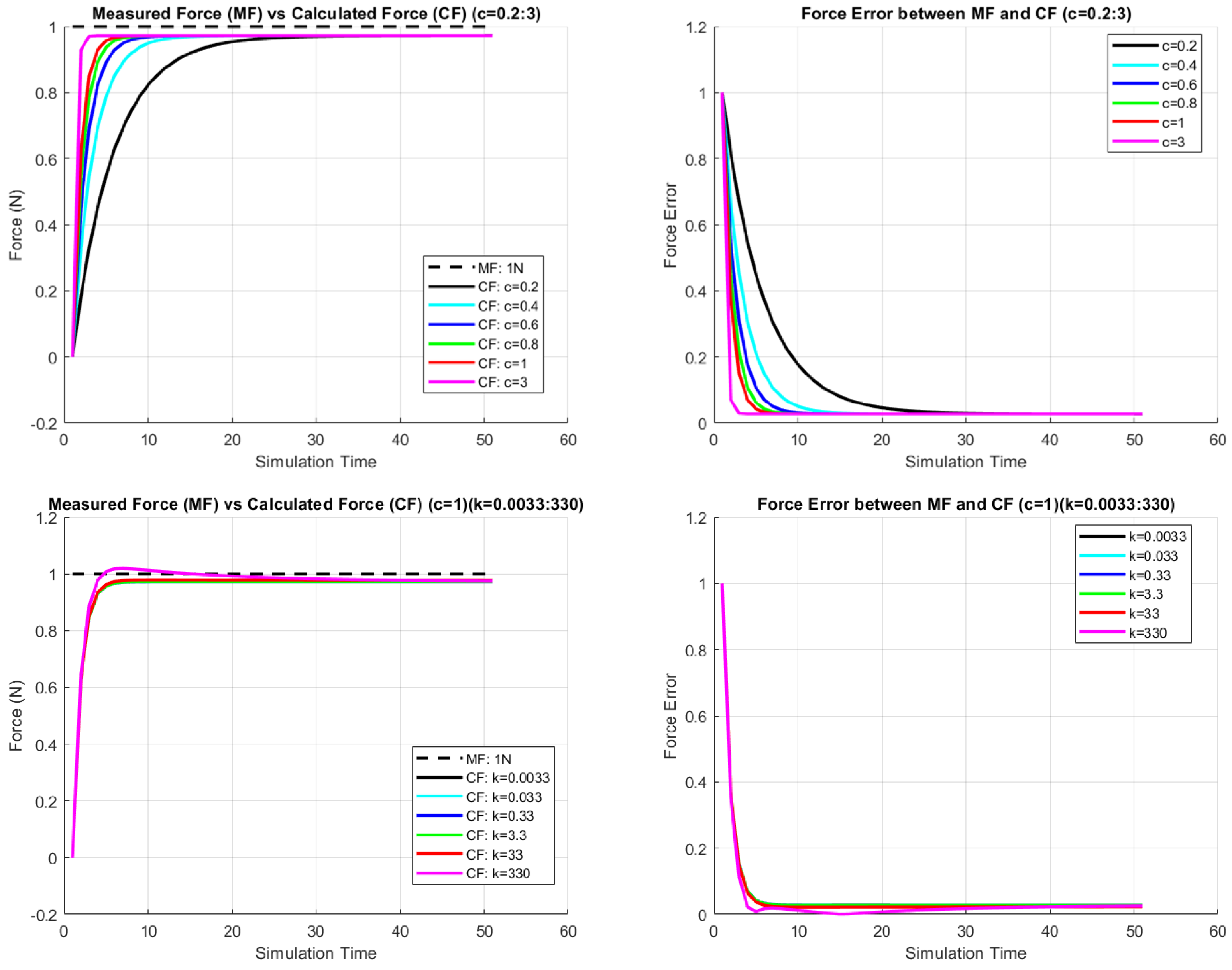
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FBG | Fiber Bragg Gratings |
| MEMS | Micro-Electro-Mechanical Systems |
| MIRI | Minimally Invasive Robotic Instrument |
| dVRK | da Vinci Research Kit |
| FF | Force Feedback |
| HF | Haptic Feedback |
| MF | Measured Force |
| CF | Calculated Force |
| MD | Measured Displacement |
| CD | Calculated Displacement |
| VF | Force Amplification Value |
| VD | Displacement Amplification Value |
References
- Iguchi, K.; Numata, M.; Shiozawa, M.; Kazama, K.; Sawazaki, S.; Katayama, Y.; Numata, K.; Higuchi, A.; Godai, T.; Sugano, N.; et al. Analysis of surgical outcomes of laparoscopic versus open surgery for locally advanced mid-transverse colon cancer. Langenbeck’s Arch. Surg. 2023, 408, 222. [Google Scholar] [CrossRef] [PubMed]
- Tonutti, M.; Elson, D.S.; Yang, G.Z.; Darzi, A.W.; Sodergren, M.H. The role of technology in minimally invasive surgery: State of the art, recent developments and future directions. Postgrad. Med. J. 2017, 93, 159–167. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Li, H.; Cui, L.; Li, H.; Zhang, X.; Fang, S.; Zhang, Q. Research progress and development trend of surgical robot and surgical instrument arm. Int. J. Med. Robot. 2021, 17, e2309. [Google Scholar] [CrossRef] [PubMed]
- Muscolo, G.G.; Fiorini, P. Force-Torque Sensors for Minimally Invasive Surgery Robotic Tools: An overview. IEEE Trans. Med. Robot. Bionics 2023, 5, 458–471. [Google Scholar] [CrossRef]
- Muscolo, G.G.; Fiorini, P. A New Cable-Driven Model for Under-Actuated Force–Torque Sensitive Mechanisms. Machines 2023, 11, 617. [Google Scholar] [CrossRef]
- Muscolo, G.G.; Hashimoto, K.; Takanishi, A.; Dario, P. A Comparison between Two Force-Position Controllers with Gravity Compensation Simulated on a Humanoid Arm. J. Robot. 2013, 2013, 256364. [Google Scholar] [CrossRef]
- Hamida, I.B.; Laribi, M.A.; Mlika, A.; Romdhane, L.; Zeghloul, S.; Carbone, G. Multi-objective optimal design of a cable driven parallel robot for rehabilitation tasks. Mech. Mach. Theory 2021, 156, 104141. [Google Scholar] [CrossRef]
- Pinto, A.M.; Moreira, E.; Lima, J.; Sousa, J.P.; Costa, P. A cable-driven robot for architectural constructions: A visual-guided approach for motion control and path-planning. Auton. Robot. 2017, 41, 1487–1499. [Google Scholar] [CrossRef]
- Mishra, U.A.; Caro, S. Forward kinematics for suspended under-actuated cable-driven parallel robots with elastic cables: A neural network approach. J. Mech. Robot. 2022, 14, 041008. [Google Scholar] [CrossRef]
- Min, S.; Yi, S. Development of cable-driven anthropomorphic robot hand. IEEE Robot. Autom. Lett. 2021, 6, 1176–1183. [Google Scholar] [CrossRef]
- Zhang, B.; Shang, W.; Cong, S.; Li, Z. Coordinated dynamic control in the task space for redundantly actuated cable-driven parallel robots. IEEE/ASME Trans. Mechatronics 2020, 26, 2396–2407. [Google Scholar] [CrossRef]
- Muscolo, G.G.; Fiorini, P. A Planar Cable-Driven Under-Sensing Model to Measure Forces and Displacements. Machines 2024, 12, 129. [Google Scholar] [CrossRef]
- Lin, B.; Xu, W.; Li, W.; Yuan, H.; Liang, B. Ex Situ Sensing Method for the End-Effector’s Six-Dimensional Force and Link’s Contact Force of Cable-Driven Redundant Manipulators. IEEE Trans. Ind. Inform. 2024. [Google Scholar] [CrossRef]
- Francis, C.; Sato, T.; Okuyama, T.; Tanaka, M. A cable driven robotic palpation system with contact force sensing based on cable tension observation. Int. J. Med. Robot. Comput. Assist. Surg. 2022, 18, e2435. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Lin, Q.; Wei, G.; Ren, L. Tension vector and structure matrix associated force sensitivity of a 6-DOF cable-driven parallel robot. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 100–114. [Google Scholar] [CrossRef]
- Guagliumi, L.; Berti, A.; Monti, E.; Fabritius, M.; Martin, C.; Carricato, M. Force-Sensor-Free Implementation of a Hybrid Position–Force Control for Overconstrained Cable-Driven Parallel Robots. Robotics 2024, 13, 25. [Google Scholar] [CrossRef]
- Mattioni, V.; Idà, E.; Carricato, M. Force-distribution sensitivity to cable-tension errors in overconstrained cable-driven parallel robots. Mech. Mach. Theory 2022, 175, 104940. [Google Scholar] [CrossRef]
- Paty, T.; Binaud, N.; Wang, H.; Segonds, S. Sensitivity Analysis of a Suspended Cable-Driven Parallel Robot to Design Parameters. ASME J. Mech. Robot. 2023, 15, 061001. [Google Scholar] [CrossRef]
- Fabritius, M.; Rubio-Gómez, G.; Martin, C.; Santos, J.C.; Kraus, W.; Pott, A. A nullspace-based force correction method to improve the dynamic performance of cable-driven parallel robots. Mech. Mach. Theory 2023, 181, 105177. [Google Scholar] [CrossRef]
- Meccariello, G.; Faedi, F.; AlGhamdi, S.; Montevecchi, F.; Firinu, E.; Zanotti, C.; Cavaliere, D.; Gunelli, R.; Taurchini, M.; Amadori, A.; et al. An experimental study about haptic feedback in robotic surgery: May visual feedback substitute tactile feedback? J. Robot. Surg. 2016, 10, 57–61. [Google Scholar] [CrossRef]
- Yang, Y.; Li, J.; Kong, K.; Wang, S. Design of a dexterous robotic surgical instrument with a novel bending mechanism. Int. J. Med. Robot. Comput. Assist. Surg. 2022, 18, E2334. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Zhu, C.; Ding, Y.; Wang, Y.; Xu, B.; Xu, K. A robotic surgical tool with continuum wrist, kinematically optimized curved stem, and collision avoidance kinematics for single port procedure. Mech. Mach. Theory 2022, 173, 104863. [Google Scholar] [CrossRef]
- Kim, L.H.; Bargar, C.; Che, Y.; Okamura, A.M. Effects of master-slave tool misalignment in a teleoperated surgical robot. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Tzemanaki, A.; Fracczak, L.; Gillatt, D.; Koupparis, A.; Melhuish, C.; Persad, R.; Rowe, E.; Pipe, A.G.; Dogramadzi, S. Design of a multi-DOF cable-driven mechanism of a miniature serial manipulator for robot-assisted minimally invasive surgery. In Proceedings of the 2016 6th IEEE International Conference on Biomedical Robotics and Biomechatronics (BioRob), Singapore, 26–29 June 2016; pp. 55–60. [Google Scholar]
- Mylonas, G.P.; Vitiello, V.; Cundy, T.P.; Darzi, A.; Yang, G.-Z. CYCLOPS: A versatile robotic tool for bimanual single-access and natural-orifice endoscopic surgery. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2436–2442. [Google Scholar] [CrossRef]
- Xiong, L.; Guo, Y.; Jiang, G.; Zhou, X.; Jiang, L.; Liu, H. Six-Dimensional Force/Torque Sensor Based on Fiber Bragg Gratings With Low Coupling. IEEE Trans. Ind. Electron. 2021, 68, 4079–4089. [Google Scholar] [CrossRef]
- Golahmadi, A.K.; Khan, D.Z.; Mylonas, G.P.; Marcus, H.J. Tool-tissue forces in surgery: A systematic review. Ann. Med. Surg. 2021, 65, 102268. [Google Scholar] [CrossRef]
- Wang, H.; Wang, W.; Du, Z.; Gao, Y. Design of 3D force perception system of surgical robots based on fiber Bragg grating. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2021; Volume 336. [Google Scholar]
- Cheng, A.J.; Wu, L.; Sha, Z.; Chang, W.; Chu, D.; Wang, C.H.; Peng, S. Recent advances of capacitive sensors: Materials, microstructure designs, applications, and opportunities. Adv. Mater. Technol. 2023, 8, 2201959. [Google Scholar] [CrossRef]
- Sarwar, M.S.; Ishizaki, R.; Morton, K.; Preston, C.; Nguyen, T.; Fan, X.; Dupont, B.; Hogarth, L.; Yoshiike, T.; Qiu, R.; et al. Touch, press and stroke: A soft capacitive sensor skin. Sci. Rep. 2023, 13, 17390. [Google Scholar] [CrossRef]
- Shi, H.; Zhang, B.; Mei, X.; Song, Q. Realization of force detection and feedback control for slave manipulator of master/slave surgical robot. Sensors 2021, 21, 7489. [Google Scholar] [CrossRef]
- Puangmali, P.; Althoefer, K.; Seneviratne, L.D.; Murphy, D.; Dasgupta, P. State-of-the-art in force and tactile sensing for minimally invasive surgery. IEEE Sens. J. 2008, 8, 371–381. [Google Scholar] [CrossRef]
- Schäfer, M.; Glöckner, A.; Friedrich, G.; Meiringer, J.; Pott, P. Measuring interaction forces in surgical telemanipulation using conventional instruments. Robotica 2023, 41, 1335–1347. [Google Scholar] [CrossRef]
- Ranganath, R.; Nair, P.S.; Mruthyunjaya, T.S.; Ghosal, A. A force–torque sensor based on a Stewart Platform in a near-singular configuration. Mech. Mach. Theory 2004, 39, 971–998. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muscolo, G.G.; Fiorini, P. Cable-Driven Mechanism Models for Sensitive and Actuated Minimally Invasive Robotic Instruments. Appl. Sci. 2024, 14, 2951. https://doi.org/10.3390/app14072951
Muscolo GG, Fiorini P. Cable-Driven Mechanism Models for Sensitive and Actuated Minimally Invasive Robotic Instruments. Applied Sciences. 2024; 14(7):2951. https://doi.org/10.3390/app14072951
Chicago/Turabian StyleMuscolo, Giovanni Gerardo, and Paolo Fiorini. 2024. "Cable-Driven Mechanism Models for Sensitive and Actuated Minimally Invasive Robotic Instruments" Applied Sciences 14, no. 7: 2951. https://doi.org/10.3390/app14072951
APA StyleMuscolo, G. G., & Fiorini, P. (2024). Cable-Driven Mechanism Models for Sensitive and Actuated Minimally Invasive Robotic Instruments. Applied Sciences, 14(7), 2951. https://doi.org/10.3390/app14072951