

Environmental Interference Suppression by Hybrid Segmentation Algorithm for Open-Area Electromagnetic Capability Testing



Abstract
1. Introduction
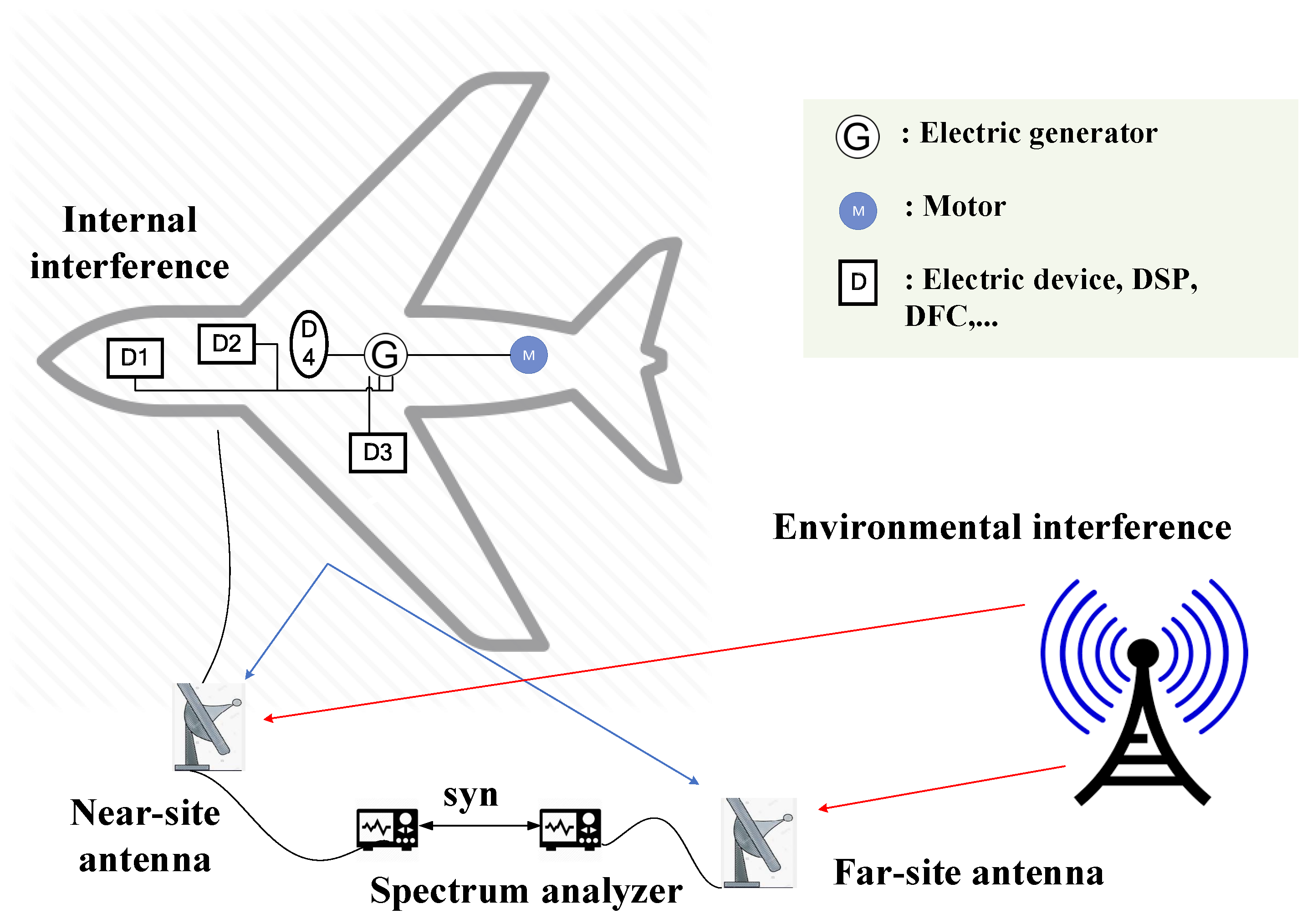
2. System Configuration of Open-Area EMC Testing
2.1. Review on EM Radiative Characteristics
2.2. Near–Far EMC Testing Configuration
3. Open-Area Environmental Interference Suppression Model
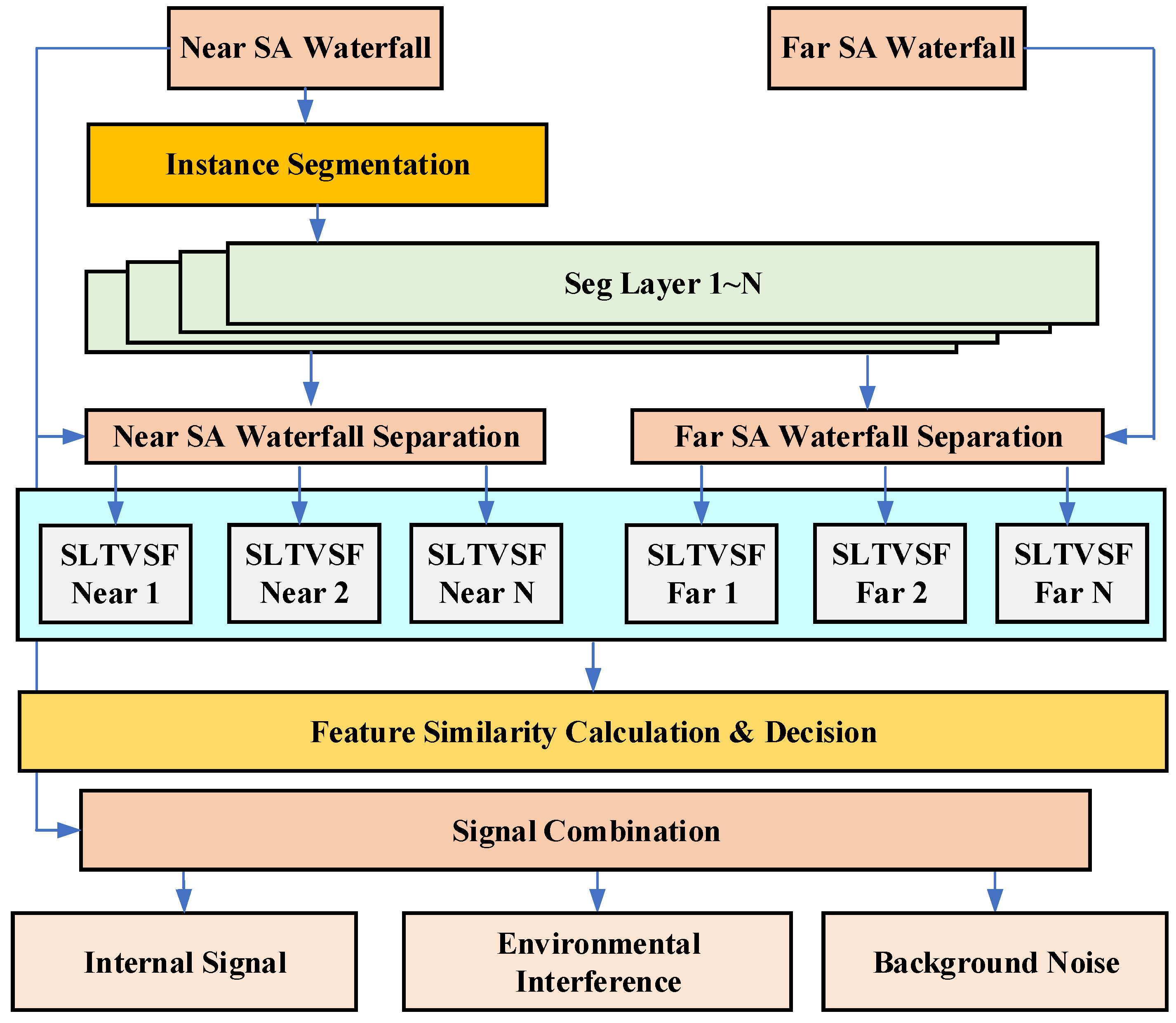
3.1. Environmental Interference Suppression Framework
3.2. Hybrid Segmentation Algorithm
3.3. Feature Similarity Decision Criterion
4. Experimental Analysis
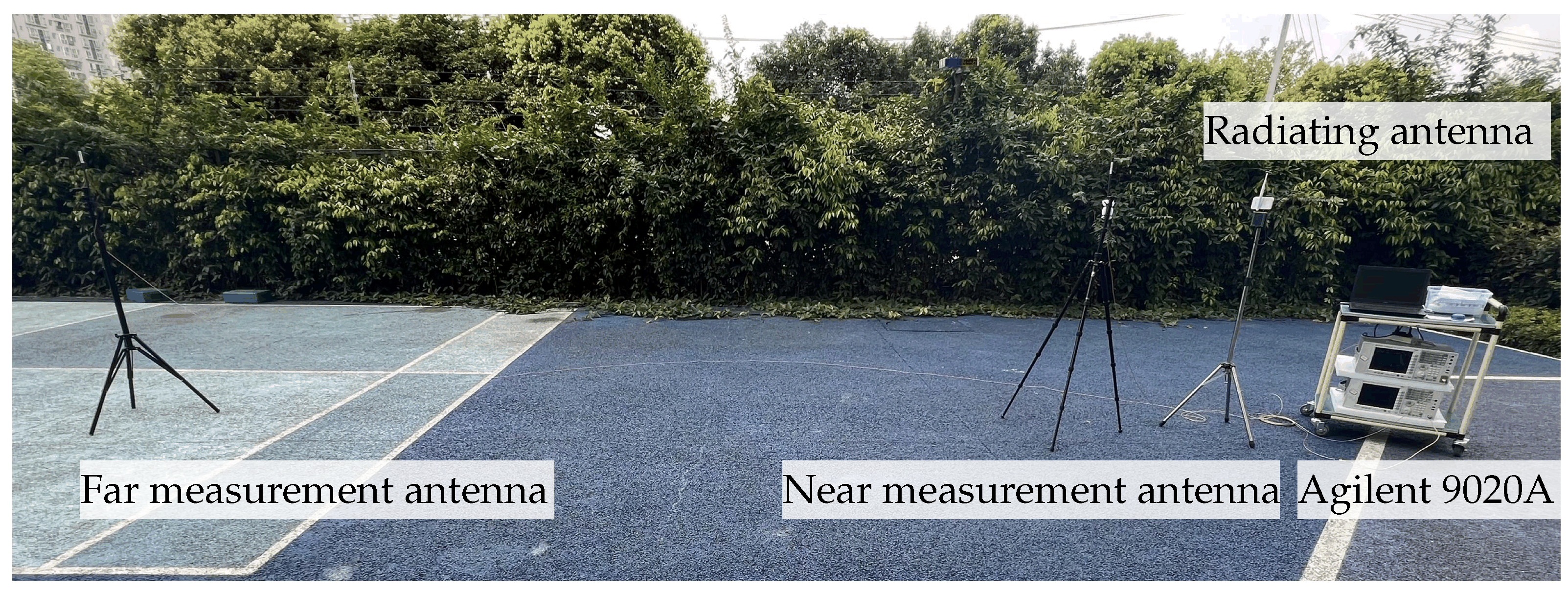
4.1. Experiment Description
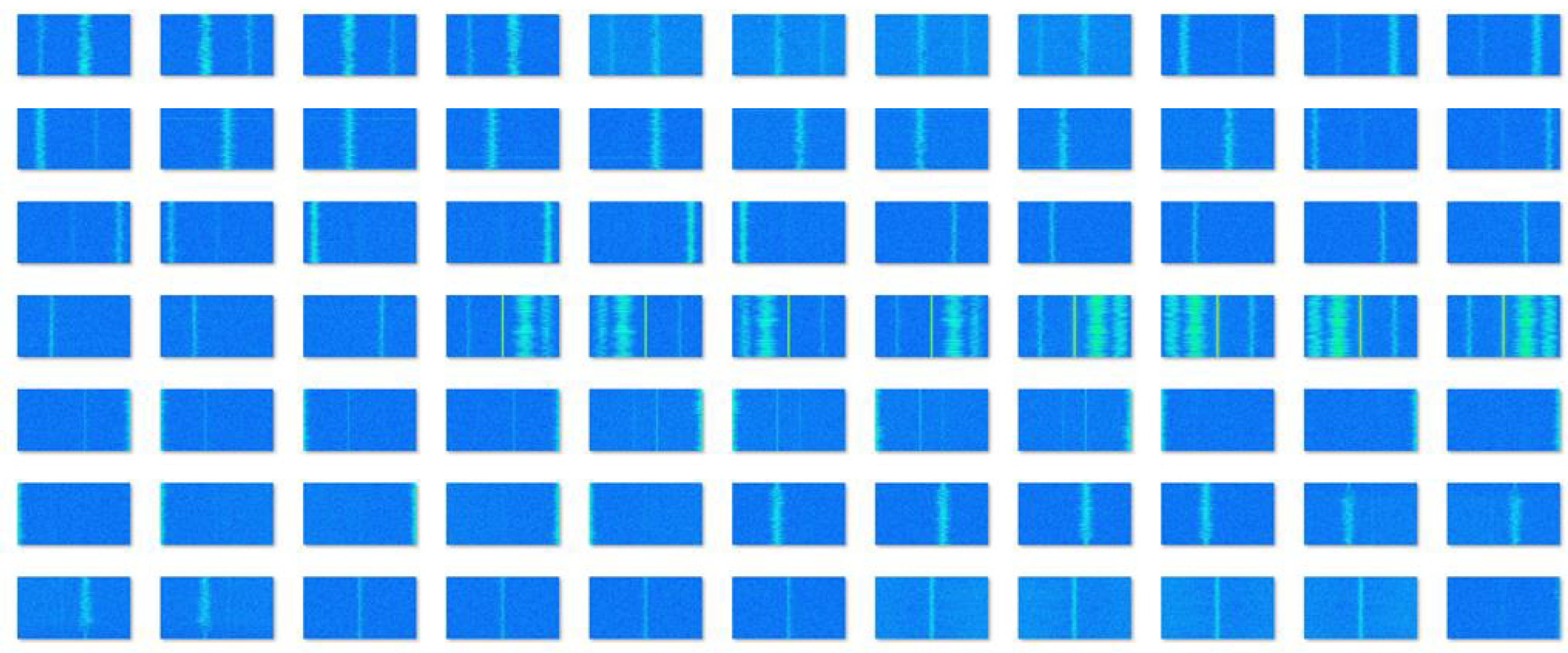
4.2. Analysis of Segmentation Performance
4.3. Analysis of Suppression Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.W.; Li, M.; Duan, X.T. A Hybrid Model for Semantic Image Segmentation. In Proceedings of the 2015 3rd International Symposium on Computer, Communication, Control and Automation (3CA 2015), Paris, France, 9–10 August 2015; Information Engineering Research Institute: Weimar, TX, USA, 2015; p. 6. [Google Scholar]
- Sharma, R.; Saqib, M.; Lin, C.T.; Blumenstein, M. A Survey on Object Instance Segmentation. SN Comput. Sci. 2022, 3, 499. [Google Scholar] [CrossRef]
- Roy, R.; Mazumdar, S.; Chowdhury, A.S. ADGAN: Attribute-Driven Generative Adversarial Network for Synthesis and Multiclass Classification of Pulmonary Nodules. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 2484–2495. [Google Scholar] [CrossRef] [PubMed]
- Arafat, M.Y.; Khairuddin, A.S.M.; Paramesran, R. Connected Component Analysis Integrated Edge Based Technique for Automatic Vehicular License Plate Recognition Framework. IET Intell. Transp. Syst. 2020, 14, 712–723. [Google Scholar] [CrossRef]
- Daniel, J.; Rose, J.T.A.; Vinnarasi, F.S.F.; Rajinikanth, V. VGG-UNet/VGG-SegNet Supported Automatic Segmentation of Endoplasmic Reticulum Network in Fluorescence Microscopy Images. Scanning 2022, 2022, 7733860. [Google Scholar] [CrossRef] [PubMed]
- Ganesan, G.; Chinnappan, J. Hybridization of Resnet with Yolo Classifier for Automated Paddy Leaf Disease Recognition: An Optimized Model. J. Field Robot. 2022, 39, 1085–1109. [Google Scholar] [CrossRef]
- Near and Far Field. 2024. Available online: https://en.wikipedia.org/w/index.php?title=Near_and_far_field&oldid=1195279418 (accessed on 17 January 2024).
- Wibowo, I.A.; Jenu, M.Z.M.; Alireza, C. Preliminary Design and Development of Open Field Antenna Test Site. Int. J. Integr. Eng. 2010, 2, 3. [Google Scholar]
- Handlon, D. Radiated Emissions Measurements in an Open Area Test Site. 2010. Available online: https://www.cenam.mx/sm2010/info/pjueves/sm2010-jp06d.pdf (accessed on 17 January 2024).
- Yadavendra; Chand, S. Semantic Segmentation of Human Cell Nucleus Using Deep U-Net and Other Versions of U-Net Models. Netw. Comput. Neural Syst. 2022, 33, 167–186. [Google Scholar] [CrossRef]
- Han, L.; Li, X.; Dong, Y. Convolutional Edge Constraint-Based U-Net for Salient Object Detection. IEEE Access 2019, 7, 48890–48900. [Google Scholar] [CrossRef]
- Liu, Y. Multisource Information Data Fusion Based on Adaptive Least Mean Square Error Algorithm. Comput. Informatiz. Mech. Syst. 2022, 5, 42–44. [Google Scholar]
- Pan, L.; Chen, K.; Zheng, Z.; Zhao, Y.; Yang, P.; Li, Z.; Wu, S. Aging of Chinese Bony Orbit: Automatic Calculation Based on Unet++ and Connected Component Analysis. Surg. Radiol. Anat. 2022, 44, 749–758. [Google Scholar] [CrossRef] [PubMed]
- Boraik, O.; Manjunath, R.; Saif, M. Characters Segmentation from Arabic Handwritten Document Images: Hybrid Approach. Int. J. Adv. Comput. Sci. Appl. 2022, 13, 2022. [Google Scholar] [CrossRef]
- Diao, Z.; Sun, F. Visual Object Tracking Based on Deep Neural Network. Math. Probl. Eng. 2022, 2022, 2154463. [Google Scholar] [CrossRef]
- Dass, J.M.A.; Kumar, S.M. A Novel Approach for Small Object Detection in Medical Images Through Deep Ensemble Convolution Neural Network. Int. J. Adv. Comput. Sci. Appl. 2022, 13. [Google Scholar] [CrossRef]
- Doube, M. Multithreaded Two-Pass Connected Components Labelling and Particle Analysis in Imagej. R. Soc. Open Sci. 2021, 8, 201784. [Google Scholar] [CrossRef] [PubMed]
- Pediredla, A.; Veeraraghavan, A.; Gkioulekas, I. Ellipsoidal Path Connections for Time-Gated Rendering. ACM Trans. Graph. 2019, 38, 1–12. [Google Scholar] [CrossRef]
- Sudario, G.; Toohey, S.; Wiechmann, W.; Smart, J.; Boysen-osborn, M.; Youm, J.; Spann, S.; Wray, A. The Applied Weighted Slide Metric (AWSM) Tool: Creation of a Standard Slide Design Rubric. J. Adv. Med Educ. Prof. 2022, 10, 91–98. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Li, P.; Fang, W.; Zhou, N.; Yin, Y.; Zheng, H.; Xu, H.; Wang, R. Fuzzy Frequent Pattern Mining Algorithm Based on Weighted Sliding Window and Type-2 Fuzzy Sets over Medical Data Stream. Wirel. Commun. Mob. Comput. 2021, 2021, e6662254. [Google Scholar] [CrossRef]
- Sahu, S.P.; Londhe, N.D.; Verma, S.; Agrawal, P.; Banchhor, S.K. False Positives Reduction in Pulmonary Nodule Detection Using a Connected Component Analysis-Based Approach. Int. J. Biomed. Eng. Technol. 2022, 39, 131–148. [Google Scholar] [CrossRef]
- Kumar, A.; Yin, B.; Shaikh, A.M.; Ali, M.; Wei, W. Corrnet: Pearson Correlation Based Pruning for Efficient Convolutional Neural Networks. Int. J. Mach. Learn. Cybern. 2022, 13, 3773–3783. [Google Scholar] [CrossRef]
- Keysight. N9020A MXA Signal Analyzer, 10 Hz to 26.5 GHz. Available online: https://www.keysight.com/us/en/product/N9020A/mxa-signal-analyzer-10hz-26-5ghz.html (accessed on 17 January 2024).
- Keysight. E8267D PSG Vector Signal Generator, 100 kHz to 44 GHz. Available online: https://www.keysight.com/us/en/product/E8267D/psg-vector-signal-generator-100-khz-44-ghz.html (accessed on 17 January 2024).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Class | Single-Frequency | Narrow-Band | Incomplete | Total |
|---|---|---|---|---|
| Number | 4 | 45 | 4 | 53 |
| Correct | 4 | 43 | 4 | 51 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.; Chen, S.; Zhang, F.; Yang, X.; Shi, J.; Zhang, X. Environmental Interference Suppression by Hybrid Segmentation Algorithm for Open-Area Electromagnetic Capability Testing. Appl. Sci. 2024, 14, 2703. https://doi.org/10.3390/app14072703
Yang S, Chen S, Zhang F, Yang X, Shi J, Zhang X. Environmental Interference Suppression by Hybrid Segmentation Algorithm for Open-Area Electromagnetic Capability Testing. Applied Sciences. 2024; 14(7):2703. https://doi.org/10.3390/app14072703
Chicago/Turabian StyleYang, Shun, Shuai Chen, Fan Zhang, Xiaqing Yang, Jun Shi, and Xiaoling Zhang. 2024. "Environmental Interference Suppression by Hybrid Segmentation Algorithm for Open-Area Electromagnetic Capability Testing" Applied Sciences 14, no. 7: 2703. https://doi.org/10.3390/app14072703
APA StyleYang, S., Chen, S., Zhang, F., Yang, X., Shi, J., & Zhang, X. (2024). Environmental Interference Suppression by Hybrid Segmentation Algorithm for Open-Area Electromagnetic Capability Testing. Applied Sciences, 14(7), 2703. https://doi.org/10.3390/app14072703