
Design and Analysis of a Novel Variable Stiffness Joint Based on Leaf Springs


Abstract
1. Introduction
2. Principle of the VSJ
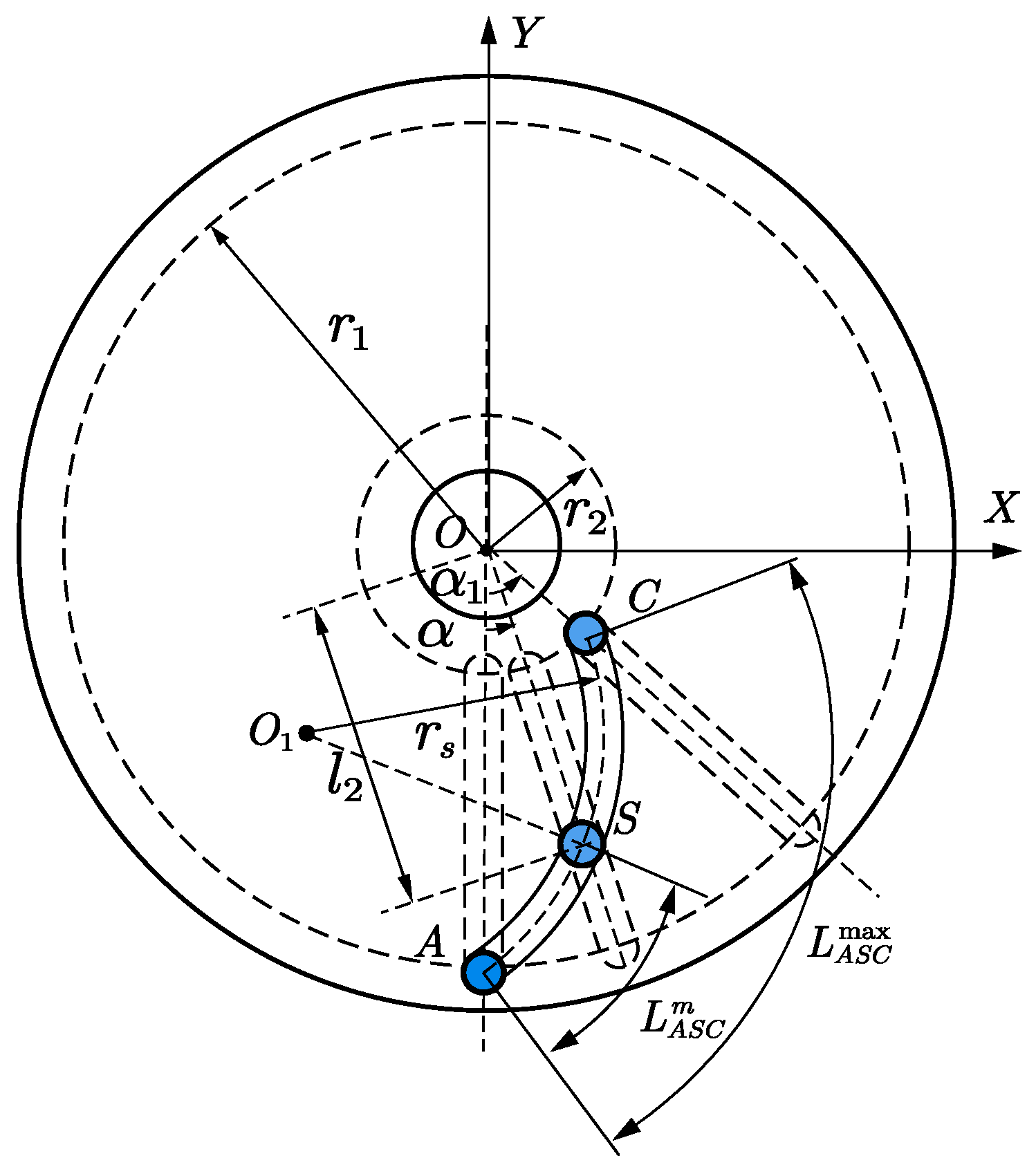
2.1. Analysis of Stiffness Regulation Principles
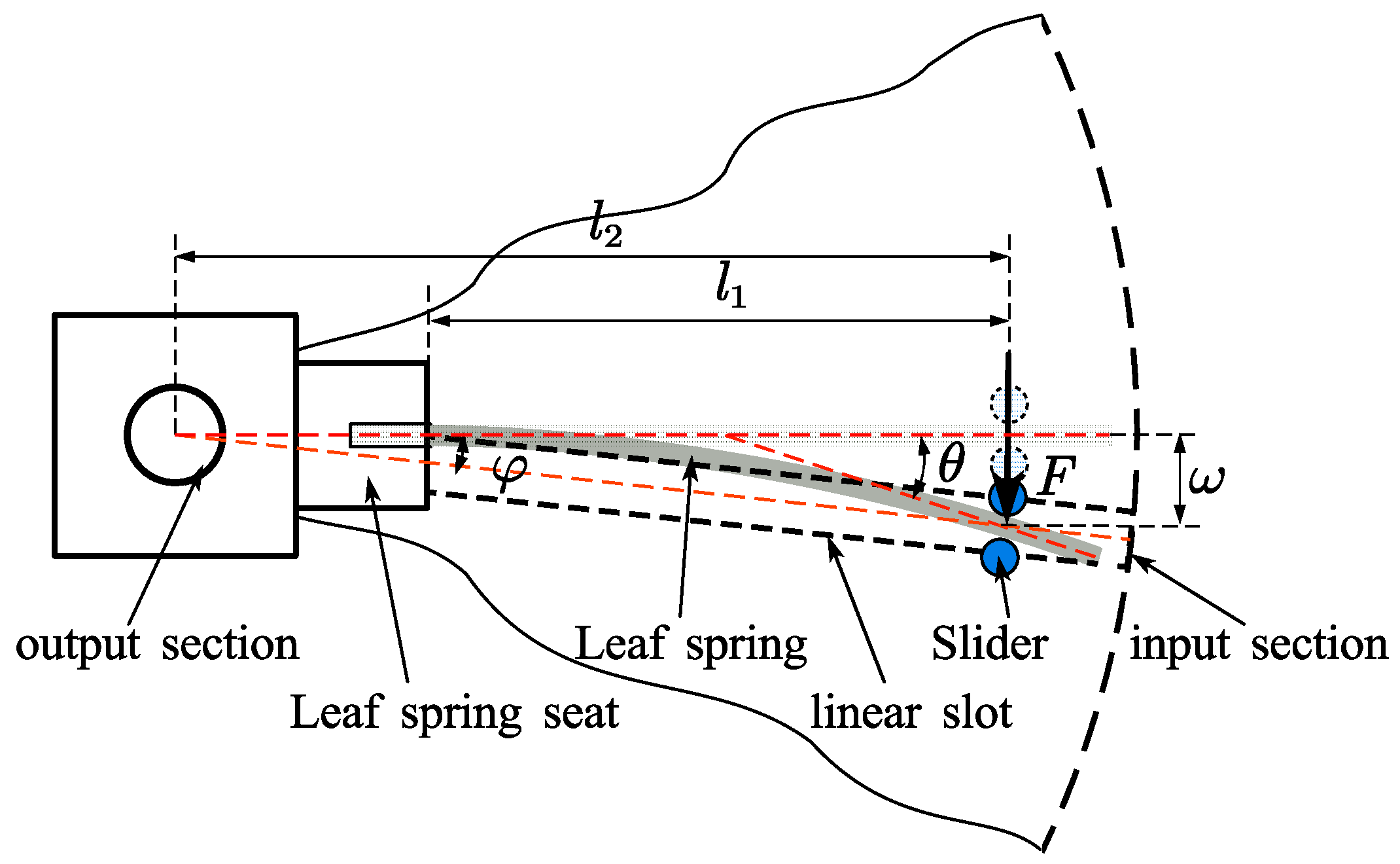
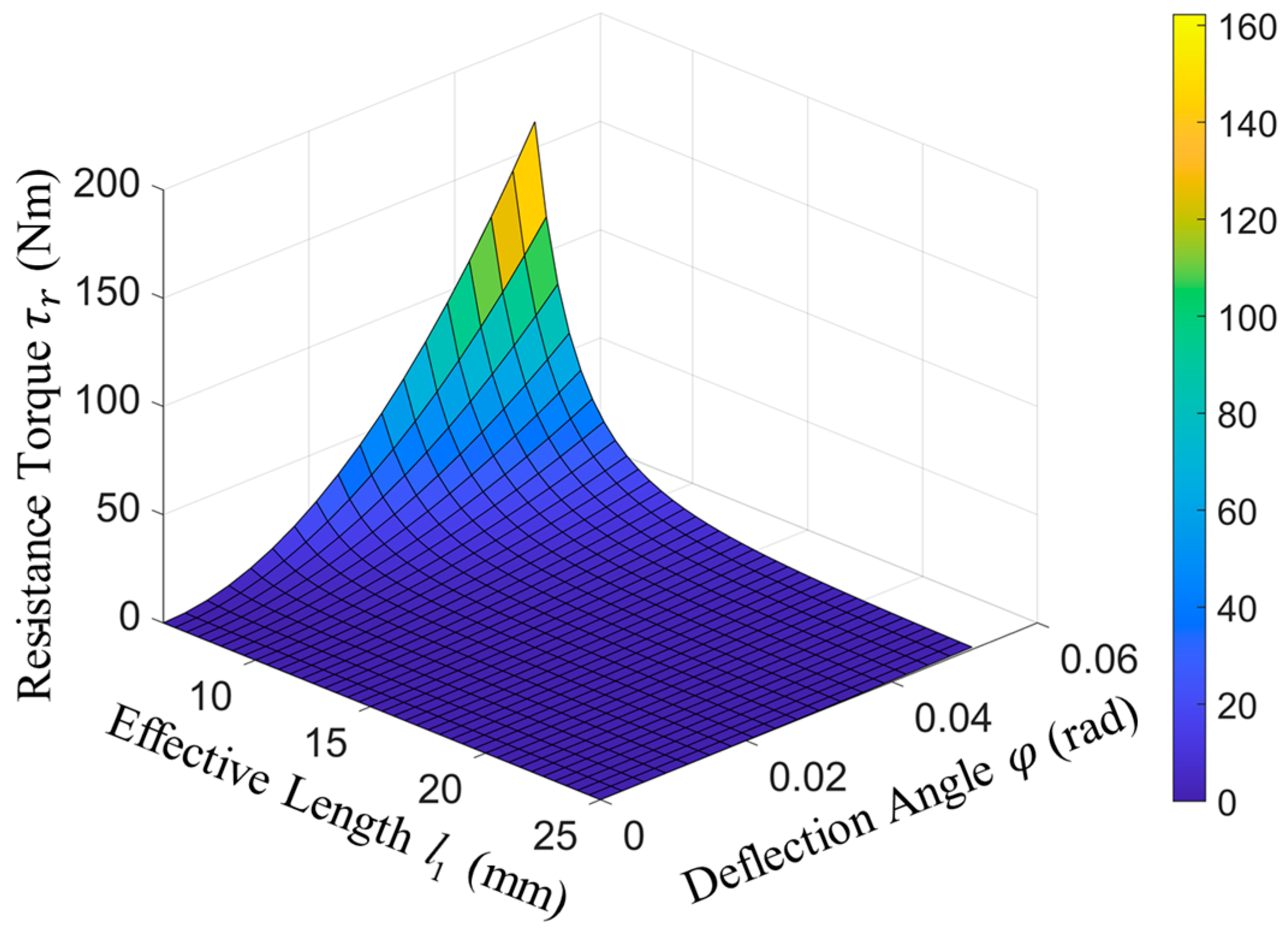
2.2. Stiffness Model
2.3. Design of Stiffness Adjustment Mechanism

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| O | the center position of the stiffness regulation disc |
| the center position of the arcuate slots | |
| (,) | the abscissa and ordinate of the point of |
| A, S, C | the position of the slider |
| ,, | the arc length of the slider |
| (0, ) | the coordinates of A |
| (, ) | the coordinates of S |
| (, ) | the coordinates of C |
| the distance between the origin O and the point C | |
| the distance between the origin O and the point S | |
| the distance between the origin O and the point A | |
| the angle between the line and the line | |
| the angle between the line and the line |
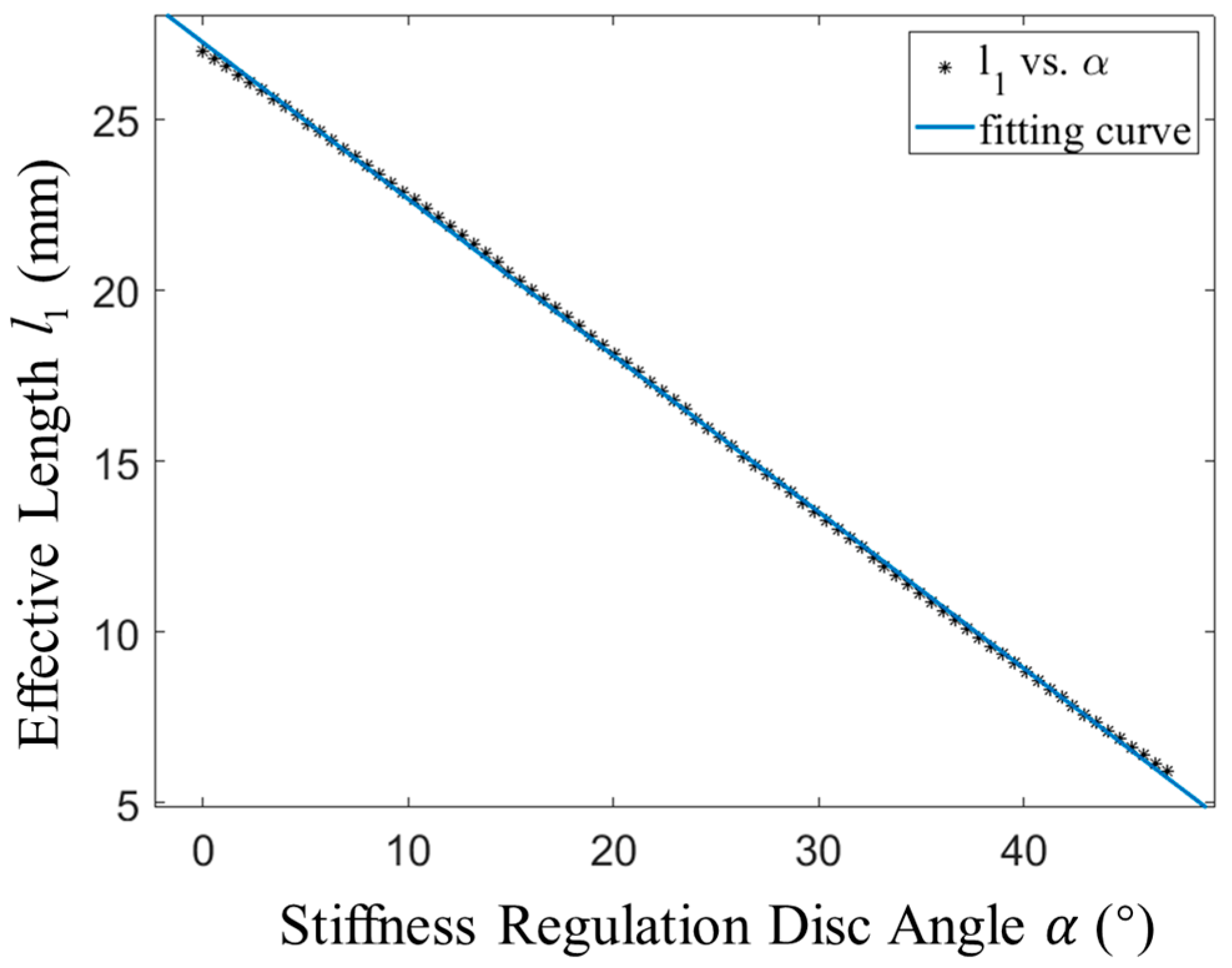
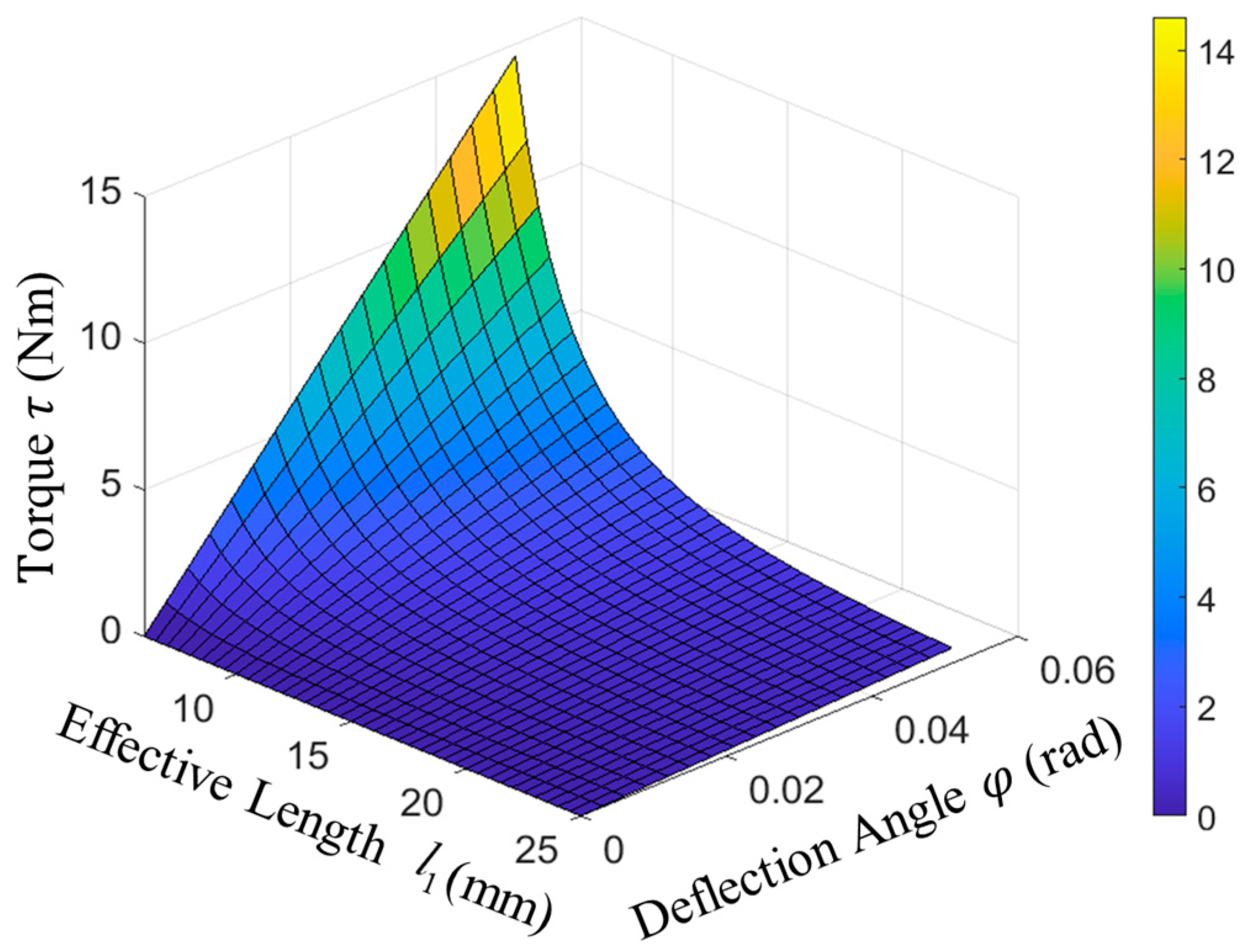
2.4. Performance Analysis of Stiffness Adjustment Mechanism
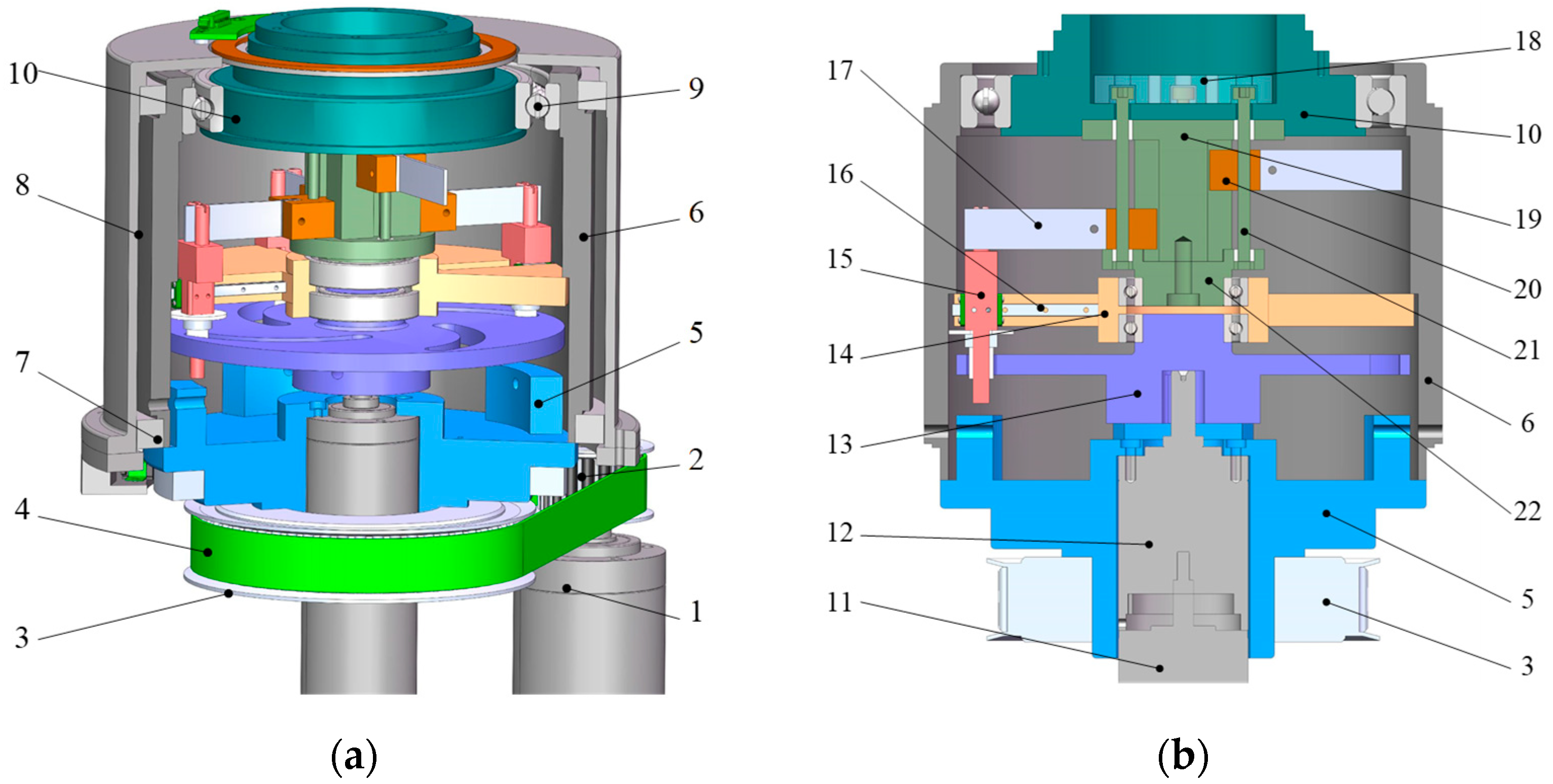
3. Overall Structural Design of VSJ
4. Dynamics Modeling and Simulation Analysis
4.1. Dynamic Modeling
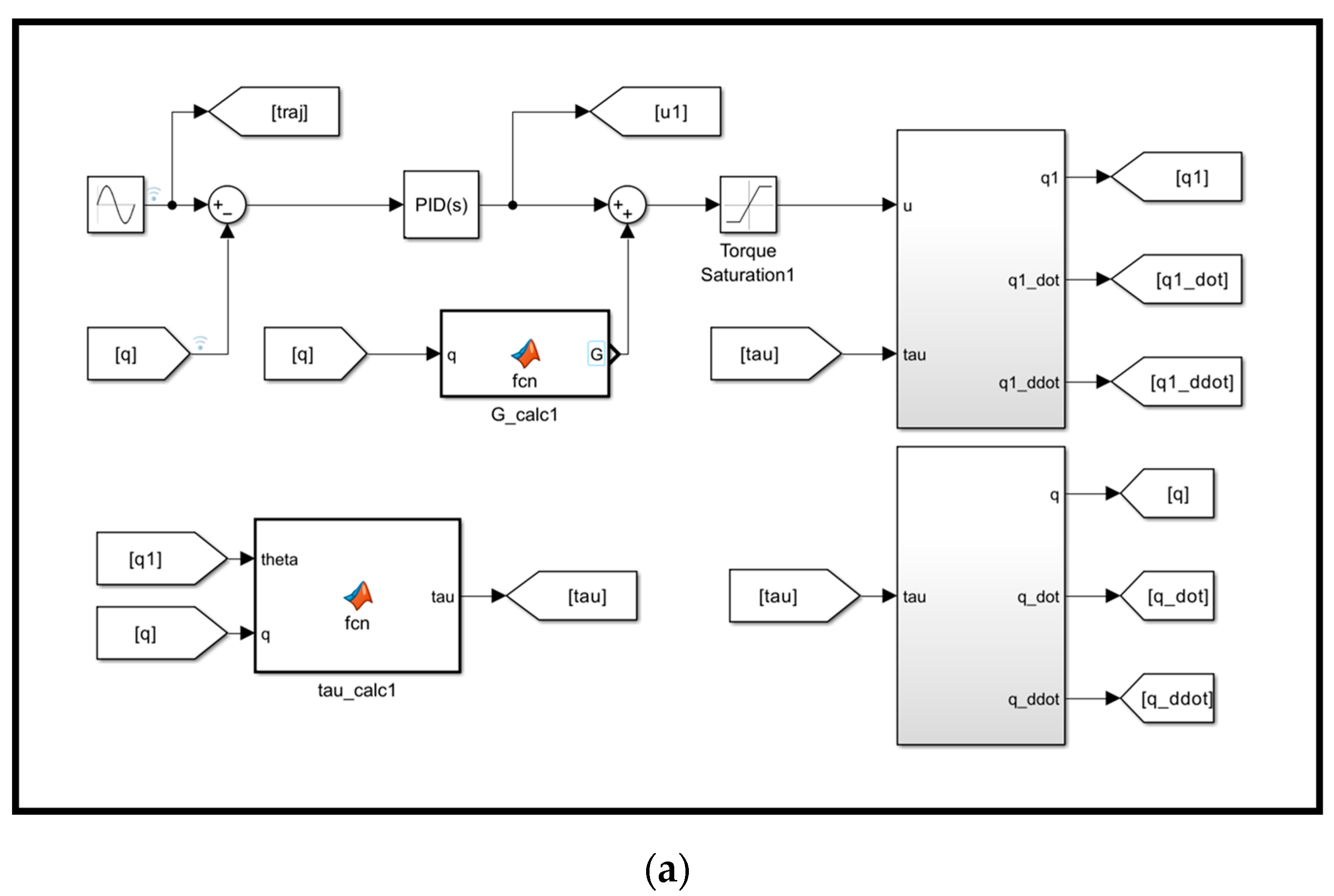
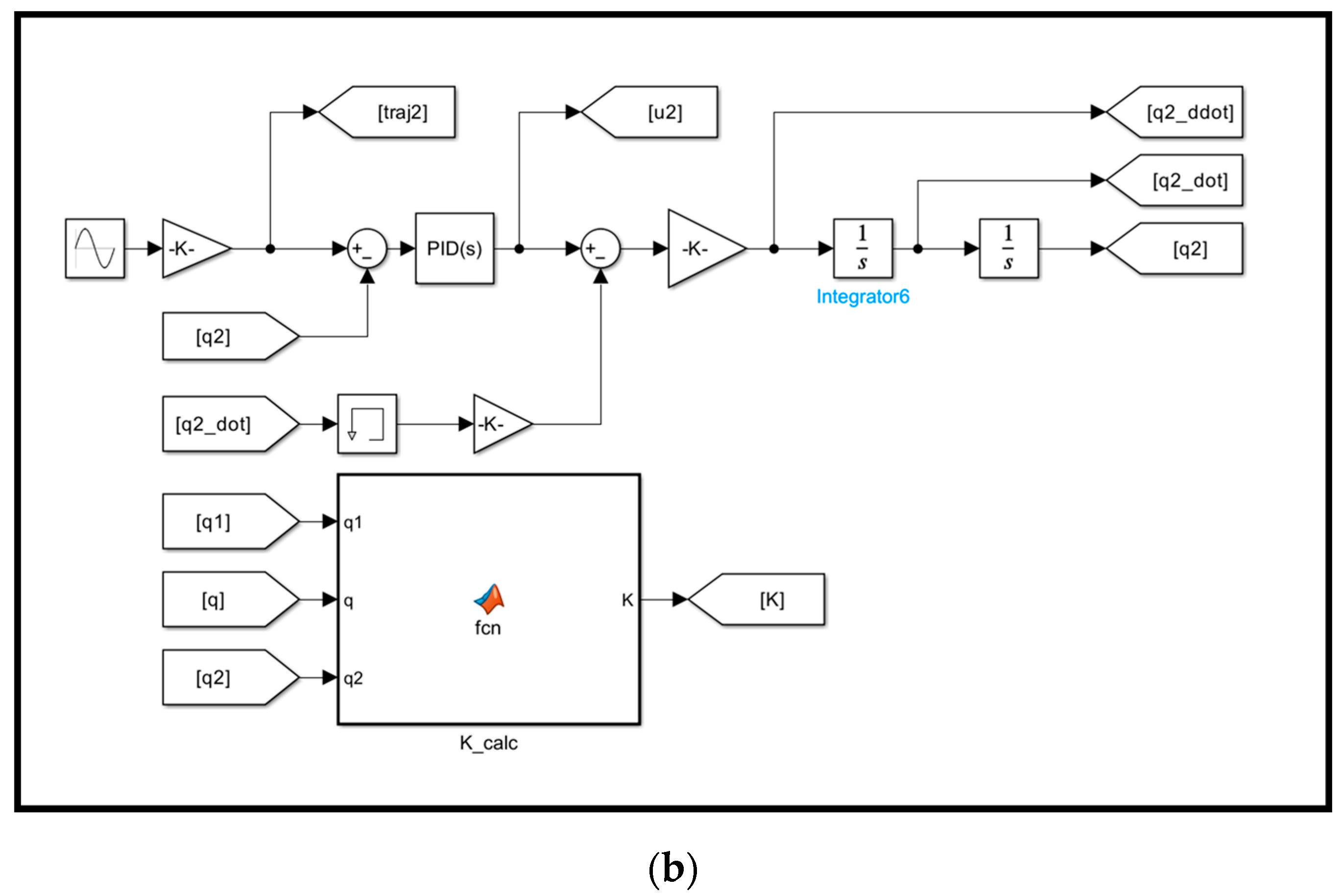
4.2. Controller Design
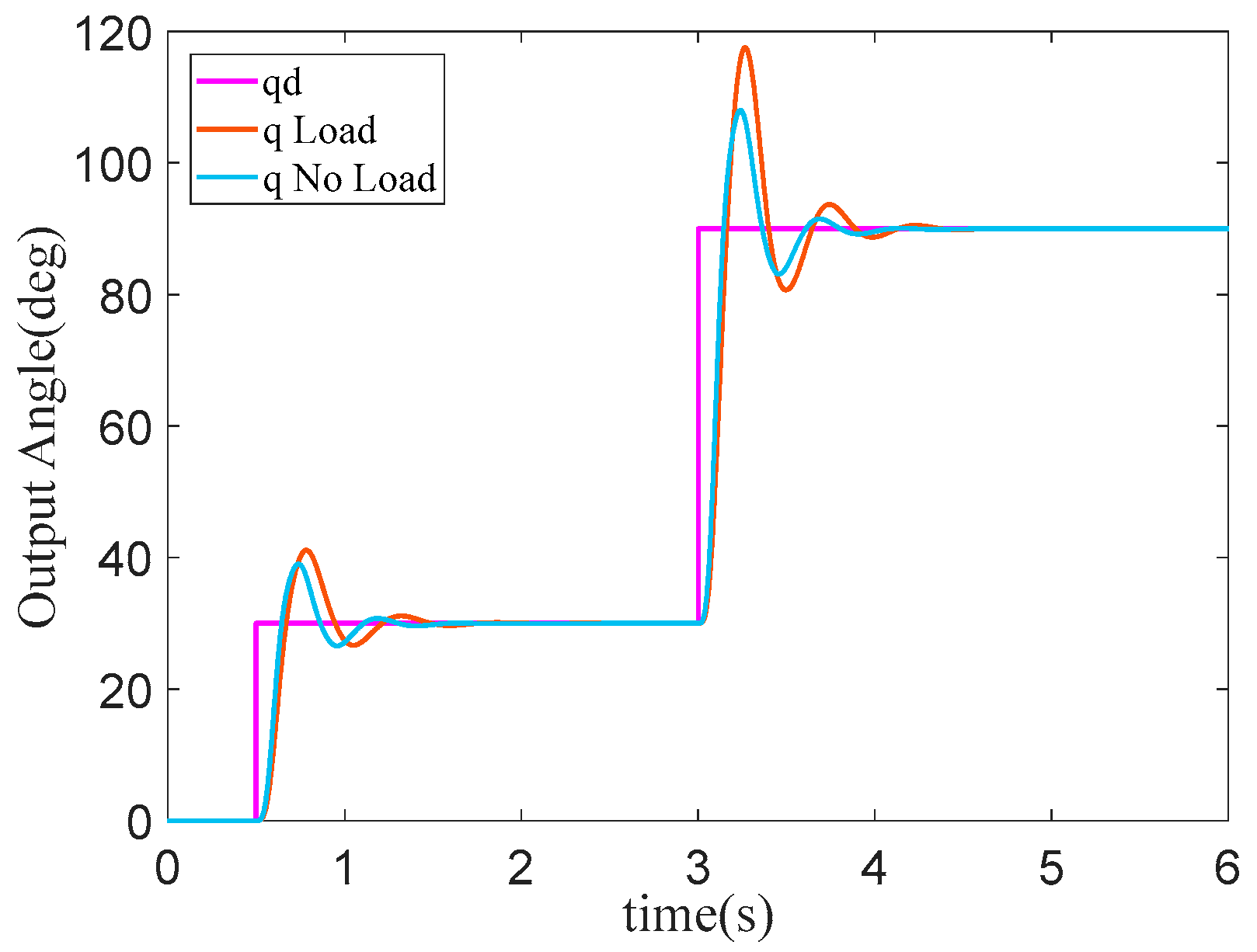
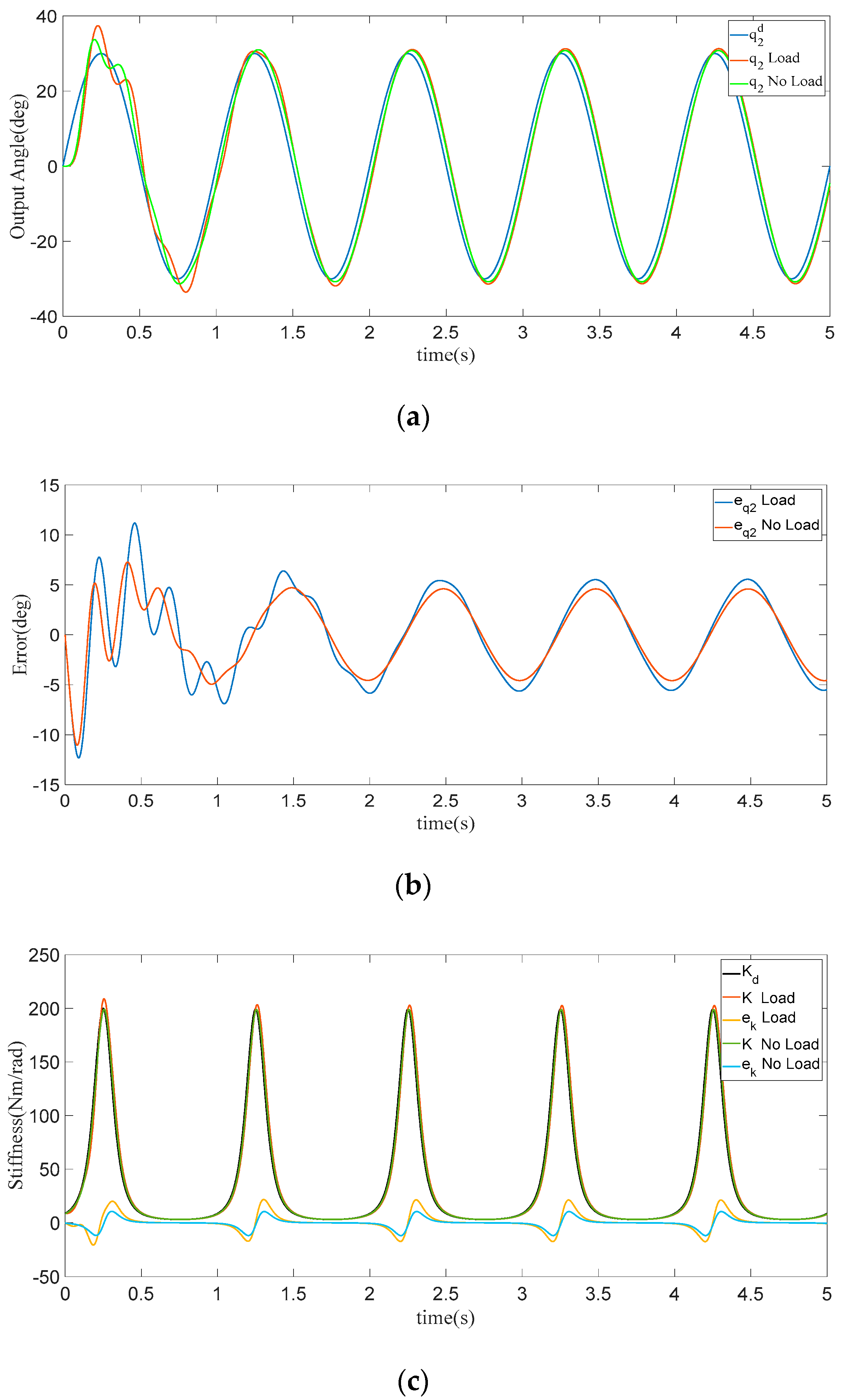
4.3. Results of Dynamic Modeling
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zacharaki, A.; Kostavelis, I.; Gasteratos, A.; Dokas, I. Safety bounds in human robot interaction: A survey. Saf. Sci. 2020, 127, 104667. [Google Scholar] [CrossRef]
- Sun, L.; Li, M.; Wang, M.; Yin, W.; Sun, N.; Liu, J. Continuous finite-time output torque control approach for series elastic actuator. Mech. Syst. Signal Proc. 2020, 139, 105853. [Google Scholar] [CrossRef]
- Zhang, M.; Ma, P.; Sun, F.; Sun, X.; Xu, F.; Jin, J.; Fang, L. Dynamic Modeling and Control of Antagonistic Variable Stiffness Joint Actuator. Actuators 2021, 10, 116. [Google Scholar] [CrossRef]
- Gao, X.; Li, X.; Zhao, C.; Hao, L.; Xiang, C. Variable stiffness structural design of a dual-segment continuum manipulator with independent stiffness and angular position. Robot. Comput. Integr. Manuf. 2021, 67, 102000. [Google Scholar] [CrossRef]
- Wolf, S.; Grioli, G.; Eiberger, O.; Friedl, W.; Grebenstein, M.; Hoeppner, H.; Burdet, E.; Caldwell, D.G.; Carloni, R.; Catalano, M.G.; et al. Variable Stiffness Actuators: Review on Design and Components. IEEE/ASME Trans. Mechatron. 2016, 21, 2418–2430. [Google Scholar] [CrossRef]
- Harder, M.; Keppler, M.; Meng, X.; Ott, C.; Hoeppner, H.; Dietrich, A. Simultaneous Motion Tracking and Joint Stiffness Control of Bidirectional Antagonistic Variable-Stiffness Actuators. IEEE Robot. Autom. Lett. 2022, 7, 6614–6621. [Google Scholar] [CrossRef]
- Xiong, X.; Sun, X.; Chen, W.; Zhi, Y.; Fang, X. Design of a Variable Stiffness Actuator Based on Variable Radius Mechanisms. In Proceedings of the 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Sapporo, Japan, 11–15 July 2022. [Google Scholar]
- Bilancia, P.; Berselli, G.; Palli, G. Virtual and physical prototyping of a beam-based variable stiffness actuator for safe human-machine interaction. Robot. Comput. Integr. Manuf. 2020, 65, 101886. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Yuan, Z.; Liu, J. Design and analysis of spring parallel variable stiffness actuator based on antagonistic principle. Mech. Mach. Theory 2019, 140, 44–58. [Google Scholar] [CrossRef]
- Grioli, G.; Wolf, S.; Garabini, M.; Catalano, M.; Burdet, E.; Caldwell, D.; Carloni, R.; Friedl, W.; Grebenstein, M.; Laffranchi, M.; et al. Variable stiffness actuators: The user’s point of view. Int. J. Robot. Res. 2015, 34, 727–743. [Google Scholar] [CrossRef]
- Bacek, T.; Moltedo, M.; Geeroms, J.; Vanderborght, B.; Rodriguez-Guerrero, C.; Lefeber, D. Varying mechanical compliance benefits energy efficiency of a knee joint actuator. Mechatronics 2020, 66, 102318. [Google Scholar] [CrossRef]
- Wolf, S.; Feenders, J.-E. Modeling and benchmarking energy efficiency of Variable Stiffness Actuators on the example of the DLR FSJ. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar]
- Torrealba, R.R.; Udelman, S.B.; Fonseca-Rojas, E.D. Design of variable impedance actuator for knee joint of a portable human gait rehabilitation exoskeleton. Mech. Mach. Theory 2017, 116, 248–261. [Google Scholar] [CrossRef]
- Wang, C.; Sheng, B.; Li, Z.; Sivan, M.; Zhang, Z.-Q.; Li, G.-Q.; Xie, S.Q. A Lightweight Series Elastic Actuator with Variable Stiffness: Design, Modeling, and Evaluation. IEEE/ASME Trans. Mechatron. 2023, 28, 3110–3119. [Google Scholar] [CrossRef]
- Zhu, Y.; Wu, Q.; Chen, B.; Xu, D.; Shao, Z. Design and evaluation of a novel torque-controllable variable stiffness actuator with reconfigurability. IEEE/ASME Trans. Mechatron. 2021, 27, 292–303. [Google Scholar] [CrossRef]
- Jiang, N.; Sun, S.; Ouyang, Y.; Xu, M.; Li, W.; Zhang, S. A highly adaptive magnetorheological fluid robotic leg for efficient terrestrial locomotion. Smart Mater. Struct. 2016, 25, 095019. [Google Scholar] [CrossRef]
- Van Ham, R.; Sugar, T.G.; Vanderborght, B.; Hollander, K.W.; Lefeber, D. Compliant actuator designs. IEEE Robot. Autom. Mag. 2009, 16, 81–94. [Google Scholar]
- Jafari, A.; Tsagarakis, N.G.; Caldwell, D.G. A novel intrinsically energy efficient actuator with adjustable stiffness (AwAS). IEEE/ASME Trans. Mechatron. 2011, 18, 355–365. [Google Scholar] [CrossRef]
- Liu, Y.; Cui, S.; Sun, Y. Mechanical design and analysis of a novel variable stiffness actuator with symmetrical pivot adjustment. Front. Mech. Eng. 2021, 16, 711–725. [Google Scholar] [CrossRef]
- Groothuis, S.S.; Rusticelli, G.; Zucchelli, A.; Stramigioli, S.; Carloni, R. The variable stiffness actuator vsaUT-II: Mechanical design, modeling, and identification. IEEE/ASME Trans. Mechatron. 2013, 19, 589–597. [Google Scholar] [CrossRef]
- Sarani, B.; Ahmadi, H. Mechanical design and control of a novel variable impedance actuator (VIA) for knee joint of a rehabilitation exoskeleton. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 81. [Google Scholar] [CrossRef]
- Wang, W.; Fu, X.; Li, Y.; Yun, C. Design and implementation of a variable stiffness actuator based on flexible gear rack mechanism. Robotica 2018, 36, 448–462. [Google Scholar] [CrossRef]
- Li, Z.; Xu, P.; Huang, H.; Ning, Y.; Li, B. A novel variable stiffness actuator based on a rocker-linked epicyclic gear train. Mech. Mach. Theory 2022, 177, 105035. [Google Scholar] [CrossRef]
- Liu, Z.; Jin, H.; Zhang, H.; Liu, Y.; Zhao, J. A Variable Stiffness Actuator Based on Second-order Lever Mechanism and Its Manipulator Integration. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Sun, J.; Guo, Z.; Sun, D.; He, S.; Xiao, X. Design, modeling and control of a novel compact, energy-efficient, and rotational serial variable stiffness actuator (SVSA-II). Mech. Mach. Theory 2018, 130, 123–136. [Google Scholar] [CrossRef]
- Choi, J.; Hong, S.; Lee, W.; Kang, S.; Kim, M. A robot joint with variable stiffness using leaf springs. IEEE Trans. Robot. 2011, 27, 229–238. [Google Scholar] [CrossRef]
- Liu, L.; Misgeld, B.J.E.; Pomprapa, A.; Leonhardt, S. A Testable Robust Stability Framework for the Variable Impedance Control of 1-DOF Exoskeleton with Variable Stiffness Actuator. IEEE Trans. Control Syst. Technol. 2021, 29, 2728–2737. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, Y.; Li, Y. Design and dynamic modeling of variable stiffness joint actuator based on archimedes spiral. IEEE Access 2018, 6, 43798–43807. [Google Scholar] [CrossRef]
- Shao, Y.; Shi, D.; Zhang, W.; Ding, X. Design and Evaluation of Variable Stiffness Actuators with Predefined Stiffness Profiles. IEEE Trans. Autom. Sci. Eng. 2023, 1–13. [Google Scholar] [CrossRef]
- Wu, J.; Wang, Z.; Chen, W.; Wang, Y.; Liu, Y.-H. Design and validation of a novel leaf spring-based variable stiffness joint with reconfigurability. IEEE/ASME Trans. Mechatron. 2020, 25, 2045–2053. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, K.; Li, J.; Li, Y. A novel rotational actuator with variable stiffness using S-shaped springs. IEEE/ASME Trans. Mechatron. 2020, 26, 2249–2260. [Google Scholar] [CrossRef]
- Xiong, J.; Sun, Y.; Zheng, J.; Dong, D.; Bai, L. Design and experiment of a SMA-based continuous-stiffness-adjustment torsional elastic component for variable stiffness actuators. Smart Mater. Struct. 2021, 30, 105021. [Google Scholar] [CrossRef]
- Ahmadi, A.; Asgari, M. Novel bio-inspired variable stiffness soft actuator via fiber-reinforced dielectric elastomer, inspired by Octopus bimaculoides. Intell. Serv. Robot. 2021, 14, 691–705. [Google Scholar] [CrossRef]
- Christie, M.; Sun, S.; Deng, L.; Du, H.; Zhang, S.; Li, W. Real-time adaptive leg-stiffness for roll compensation via magnetorheological control in a legged robot. Smart Mater. Struct. 2022, 31, 045003. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, K.; Sun, J.; Li, J. Design and analysis of a linear digital variable stiffness actuator. IEEE Access 2021, 9, 13992–14004. [Google Scholar] [CrossRef]
- Li, W.-B.; Zhang, W.-M.; Zou, H.-X.; Peng, Z.-K.; Meng, G. Bioinspired variable stiffness dielectric elastomer actuators with large and tunable load capacity. Soft Robot. 2019, 6, 631–643. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, W.; Shi, Y.; Chu, Y.; Ming, X. A new variable stiffness actuator and its control method. Ind. Rob. 2019, 46, 553–560. [Google Scholar] [CrossRef]
- Xu, Y.; Guo, K.; Sun, J.; Li, J. Design, modeling and control of a reconfigurable variable stiffness actuator. Mech. Syst. Signal Proc. 2021, 160, 107883. [Google Scholar] [CrossRef]
- Liu, H.; Zhu, D.; Xiao, J. Conceptual design and parameter optimization of a variable stiffness mechanism for producing constant output forces. Mech. Mach. Theory 2020, 154, 104033. [Google Scholar] [CrossRef]









| Parameters | Value | Unit |
|---|---|---|
| Diameter | 140 | mm |
| Height | 114 | mm |
| Weight | 4 | kg |
| Max. elastic torque with N = 1 | 14.6 | Nm |
| Stiffness adjustment range | N × (9-inf.) | Nm/rad |
| Output rotation range | 0–360 | ° |
| Deflection angle range | ±3.03 | ° |
| The leaf spring number N | 1 | / |
| The leaf spring width b | 25 | mm |
| The leaf spring thickness h | 1 | mm |
| Young’s modulus of the spring material E | 206 | GPa |
| The distance of | 54 | mm |
| The distance of | 25 | mm |
| The angle between and | 47 | ° |
| Items | Proposed VSJ | vsaUT-II [20] | REGT-VSA [23] | RVSA [31] | CLSM-VSA [29] |
|---|---|---|---|---|---|
| Regulation principle | beam length | pivot of lever | pivot of lever | beam length | section moment of inertia |
| Stiffness (Nm/rad) | N × (9-inf.) | 0.7–948 | 20–2362 | 20-inf. | 50–946 |
| Range of motion (°) | ±360 | ±28.6 | ±180 | ±360 | ±180 |
| Regulation Time (s) | 0.34 | 0.9 | 0.5 | 0.09 | 0.49 |
| Nominal torque (Nm) | N × 14.6 | 15 | 22 | 11 | 21 |
| Size (mm) | Φ140 × 114 | / | Φ128 × 257 | Φ130 × 122 | Φ80 × 155 |
| Weight (kg) | 4 | 2.5 | 4.5 | 2.08 | 1.78 |
| Stiffness adjustment mechanism | only rotating the disc | planetary gear train | rocker linkage | only rotating spring | ball screw |
| Reconfigurable/ without disassembly | yes | no | no | yes/ disassembly. | yes/ disassembly. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Gao, Y.; Xu, Y.; Wang, X.; Wang, L. Design and Analysis of a Novel Variable Stiffness Joint Based on Leaf Springs. Appl. Sci. 2024, 14, 2685. https://doi.org/10.3390/app14072685
Wang C, Gao Y, Xu Y, Wang X, Wang L. Design and Analysis of a Novel Variable Stiffness Joint Based on Leaf Springs. Applied Sciences. 2024; 14(7):2685. https://doi.org/10.3390/app14072685
Chicago/Turabian StyleWang, Caidong, Yafeng Gao, Yapeng Xu, Xinjie Wang, and Liangwen Wang. 2024. "Design and Analysis of a Novel Variable Stiffness Joint Based on Leaf Springs" Applied Sciences 14, no. 7: 2685. https://doi.org/10.3390/app14072685
APA StyleWang, C., Gao, Y., Xu, Y., Wang, X., & Wang, L. (2024). Design and Analysis of a Novel Variable Stiffness Joint Based on Leaf Springs. Applied Sciences, 14(7), 2685. https://doi.org/10.3390/app14072685