


Performance Analysis of the Particle Swarm Optimization Algorithm in a VLC System for Localization in Hospital Environments


 ,
,  ,
, 
Abstract
1. Introduction
- Staff coordination: By providing real-time data on the locations of medical staff, hospitals can enhance their operational efficiency [11,12]. This allows for a quick assembly of teams in emergency situations and the better allocation of staff resources across the facility, directly impacting response times and patient care quality.
- Navigation assistance: Helps in guiding patients and visitors through the complexities of hospital layouts [13].
- Utilization of LEDs with different wavelengths: The implementation of three transmitting LEDs with different wavelengths serves a crucial purpose. First, it enables multiplexing, allowing simultaneous data transmission using different light frequencies. This feature significantly improves the system’s capacity, accommodating more information transmission channels. In addition, different wavelengths provide diversity, reducing the likelihood of interference and enhancing the reliability of communication in complex hospital settings with various electronic devices [29].
- CSK modified modulation: The implementation of three transmitting LEDs with different wavelengths serves a crucial purpose. First, it enables multiplexing, allowing for simultaneous data transmission using different light frequencies. This feature significantly improves the system’s capacity, accommodating more information transmission channels. In addition, different wavelengths provide diversity, reducing the likelihood of interference and enhancing the reliability of communication in complex hospital settings with various electronic devices [29].
- Employment of Received Signal Strength (RSS) method: The RSS methodology is preferred for its ability to precisely measure signal strength, which correlates directly with the distance between the transmitter and receiver. This method offers a more accurate and stable distance estimation compared to other techniques, such as Time of Flight (ToF) or Angle of Arrival (AoA), which can be susceptible to environmental interference and multipath effects. In a hospital environment, where precision is paramount, the robustness and reliability of RSS make it a superior choice.
- Integration of the PSO scheme in trilateration: The incorporation of the Particle Swarm Optimization (PSO) scheme within the trilateration algorithm improves the efficiency of the method in determining the precise location of equipment or instruments. PSO is particularly adept at optimizing complex, non-linear functions, making it well suited for refining the calculation of coordinates in a three-dimensional space. This adaptability and optimization capability contribute to minimizing localization errors, which is critical in healthcare settings where accuracy is non-negotiable [30].
- Advantages over other methods: Compared to traditional technologies such as WiFi, Bluetooth, and RFID, the proposed method excels in addressing the unique challenges posed by hospital environments. The use of VLC mitigates interference with medical devices, while the RSS method and PSO scheme collectively outperform alternative proximity estimation and optimization techniques. The integration of these elements results in a comprehensive solution that offers superior accuracy, reduced costs, and improved compatibility within the complex and sensitive hospital setting [31,32].
- To propose a system based on Color Shift CSK modified modulation for localization, utilizing three transmitting LEDs with different wavelengths, enabling differentiation without transmitting any information.
- To implement a trilateration algorithm incorporating the PSO algorithm for precise localization.
- To compare the proposed positioning algorithm with several conventional trilateration and localization methods used in other research.
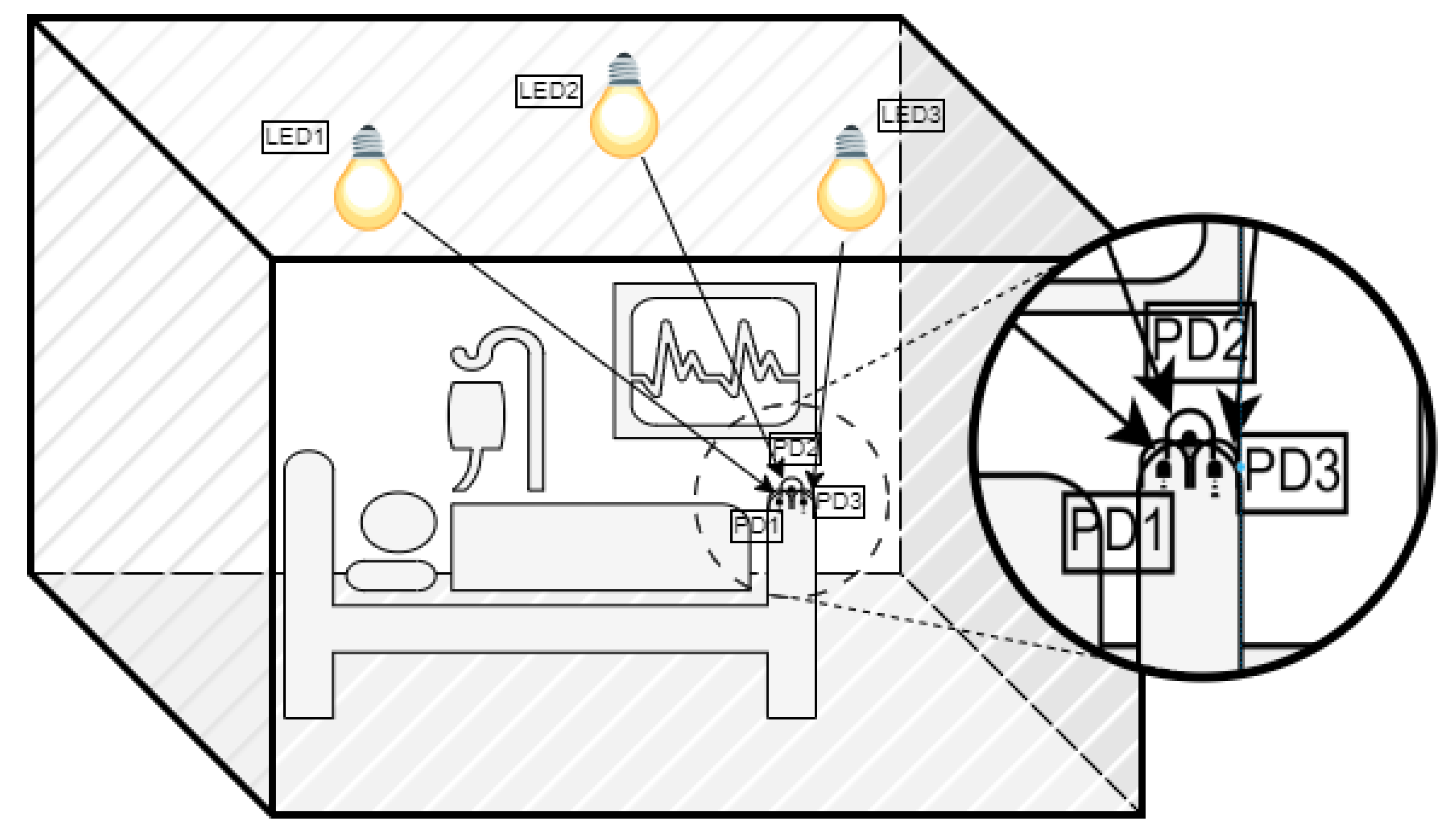
2. VLC System Model
2.1. Transmitter
2.2. Color Shift Keying Modulation
- Optical transmitters must emit light at wavelengths suitable for the hospital environment.
- Optical transmitters must emit light at wavelengths sufficiently separated from each other.
2.3. Receptor
- Accuracy and precision: WiFi-based location algorithms may not offer the same level of precision and precision needed to locate hospital equipment. VLC-based schemes, which use three LEDs with different wavelengths and incorporate a trilateration algorithm enhanced by PSO, are designed specifically to address the stringent accuracy demands of medical equipment localization [37].
- Interferences and environmental factors: Hospital environments can be dynamic and subject to various interferences. WiFi signals can be affected by environmental factors, causing fluctuations in accuracy. VLC, which operates in the visible light spectrum, is less prone to interference and provides a more stable and reliable means of localization [38].
- Customization for hospital requirements: The proposed method is designed taking into account the unique characteristics of hospital environments. The choice of VLC and the specific modifications made, such as the use of different wavelengths for LEDs, are designed to overcome the specific challenges of healthcare settings.
2.4. VLC Channel
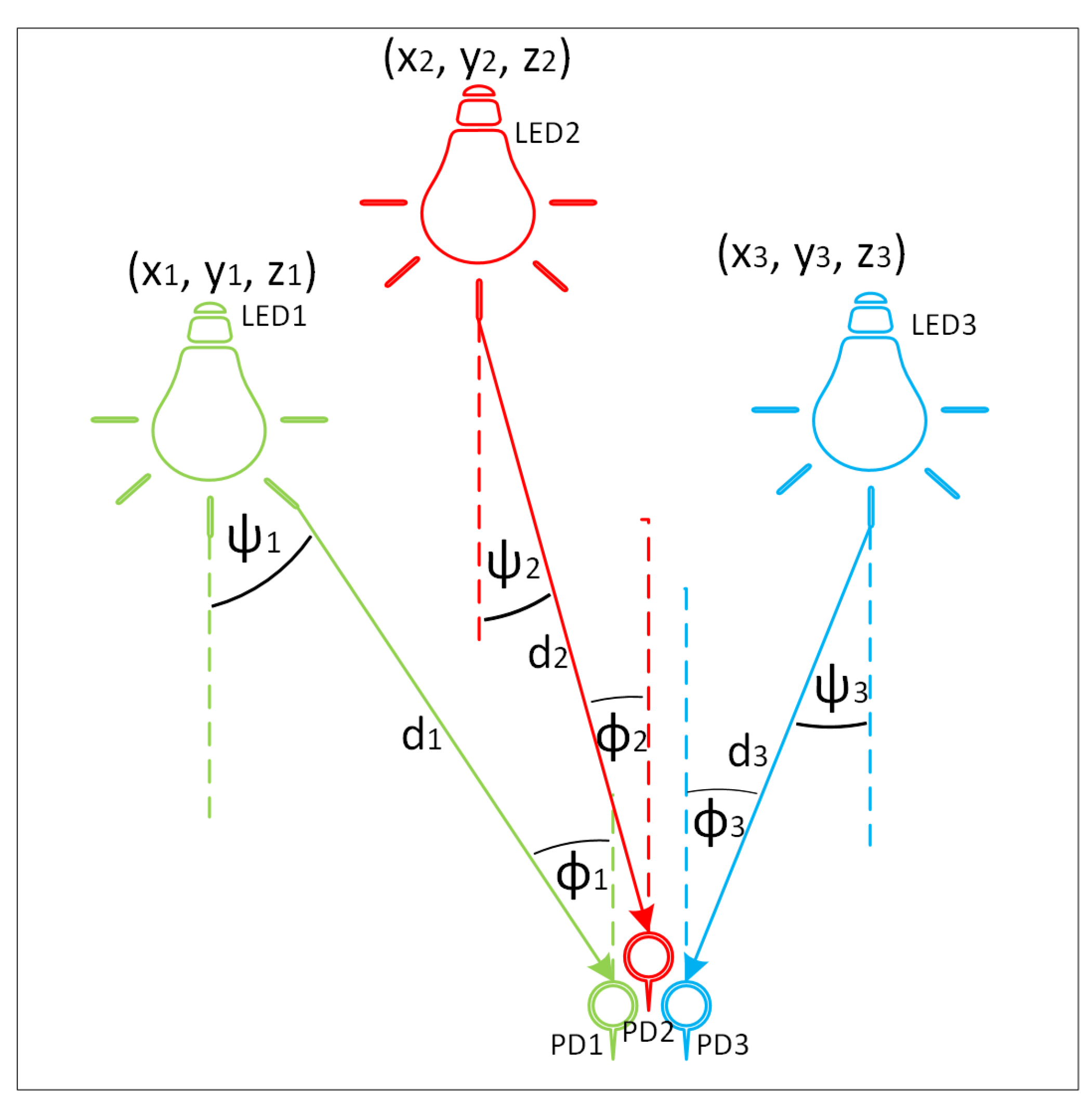
2.5. Distance between the Receiver and the LEDs
3. Trilateration and PSO Algorithms
3.1. Obtaining an Initial Solution
| Algorithm 1 Particle Swarm Optimization algorithm |
| Particle initialization by dividing the XY plane for iteration do for all particle do Update velocity Update position Evaluate the objective function value of the particle if Particle objective function value < then Update end if if Particle objective function value < then Update end if end for end for |
3.2. Iterations
4. Simulation, Results, and Discussion
4.1. PSO Algorithm Performance Analysis
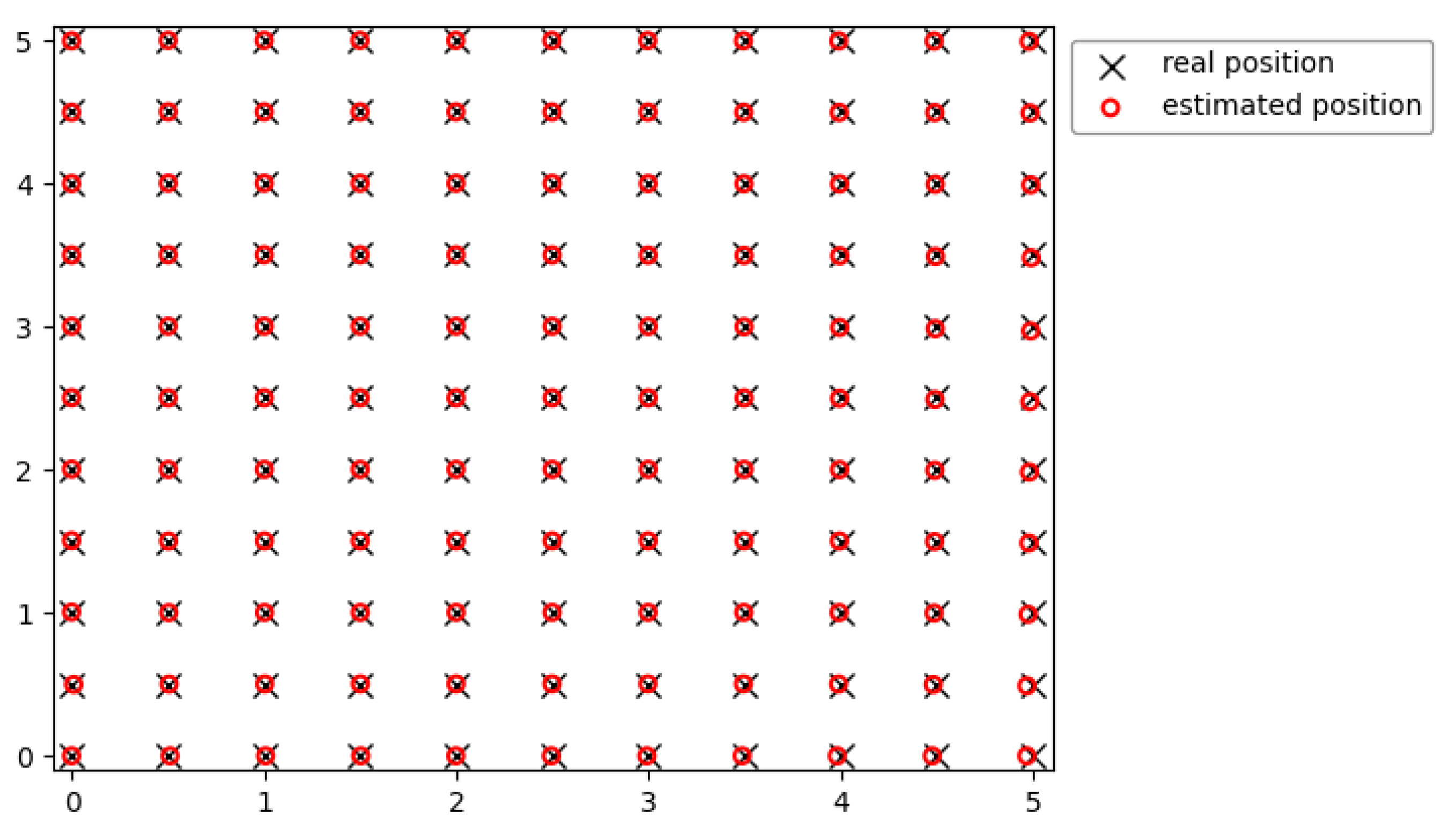
4.2. Comparative Analysis of Localization Accuracy
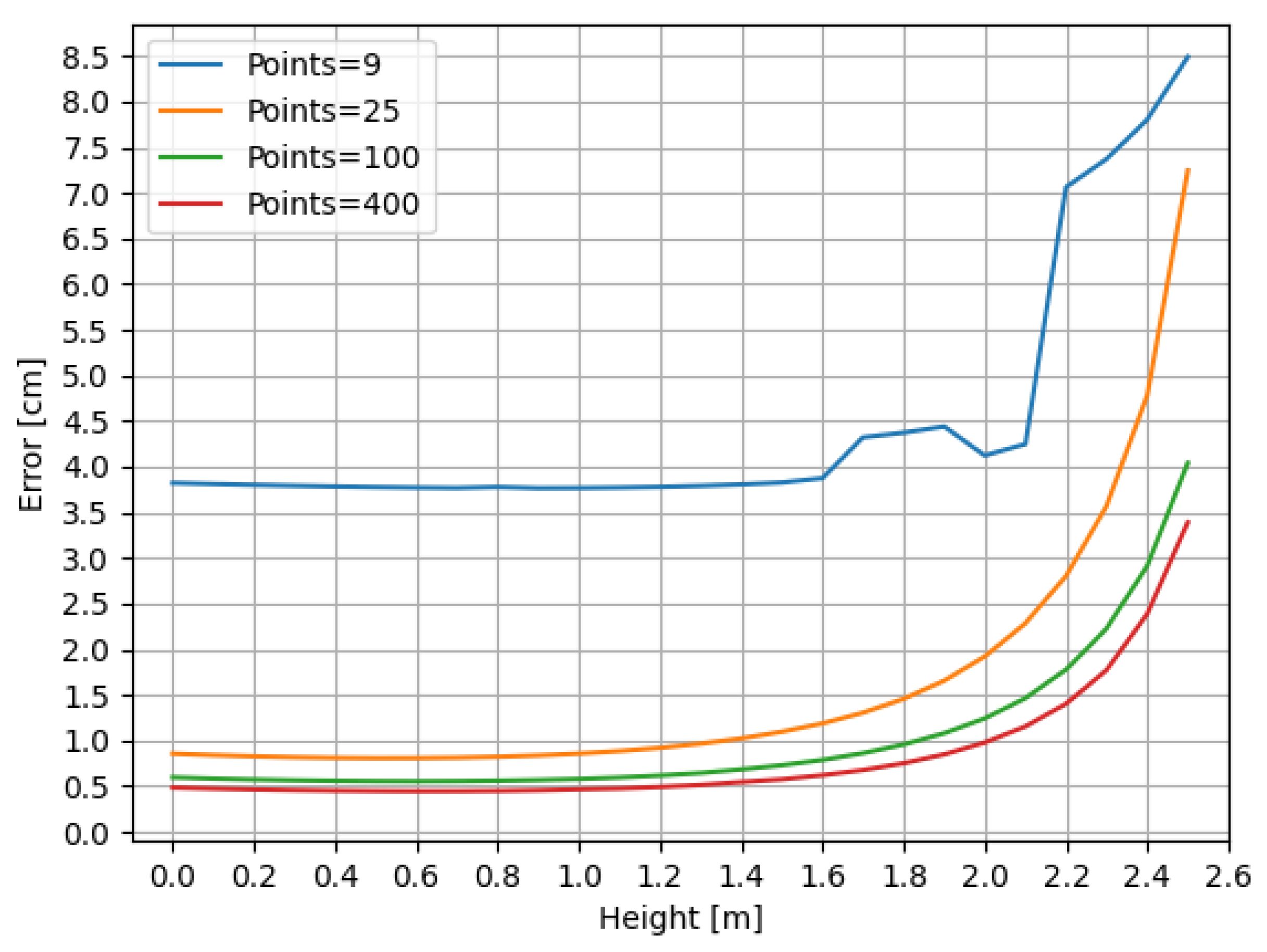
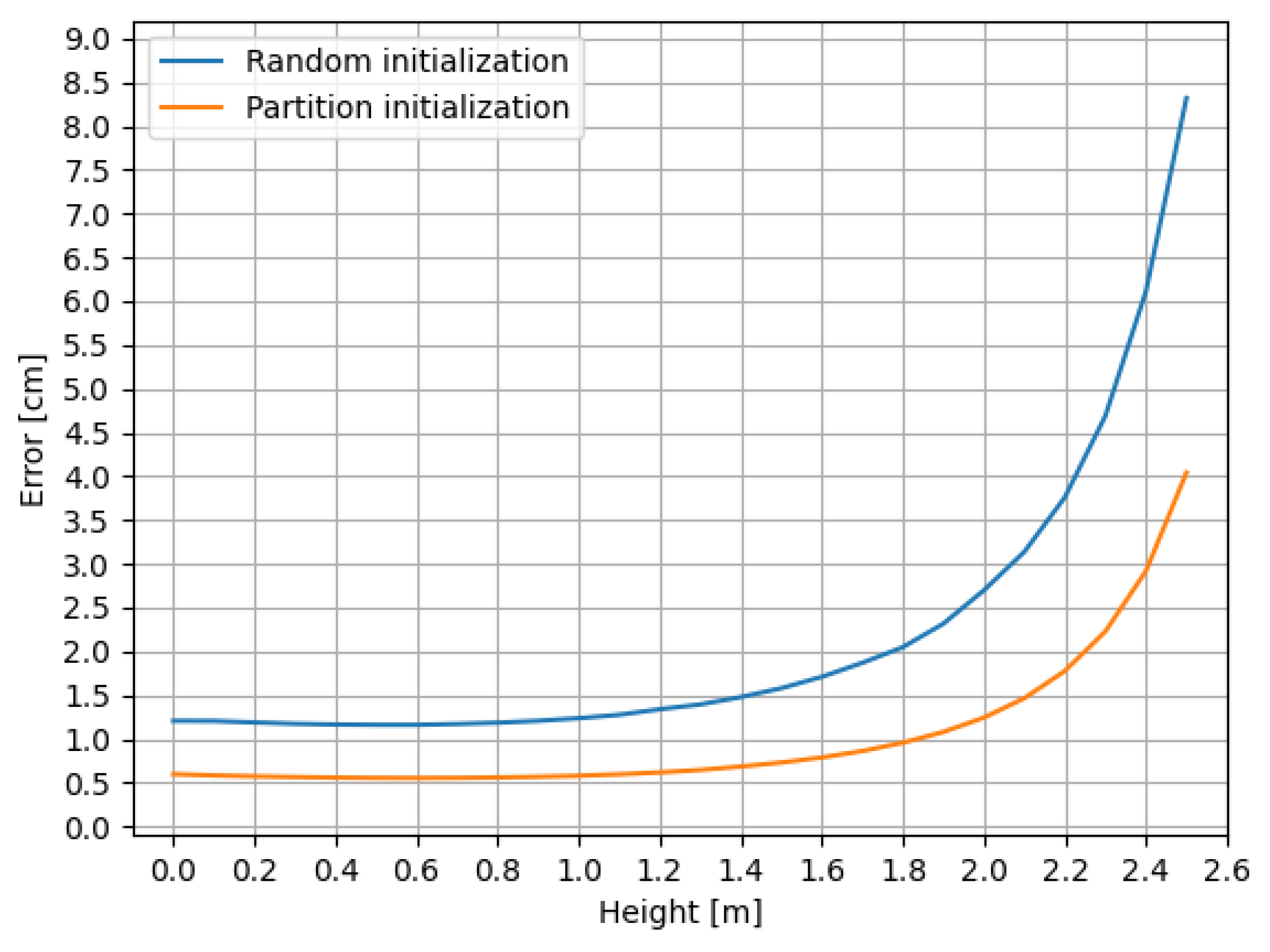
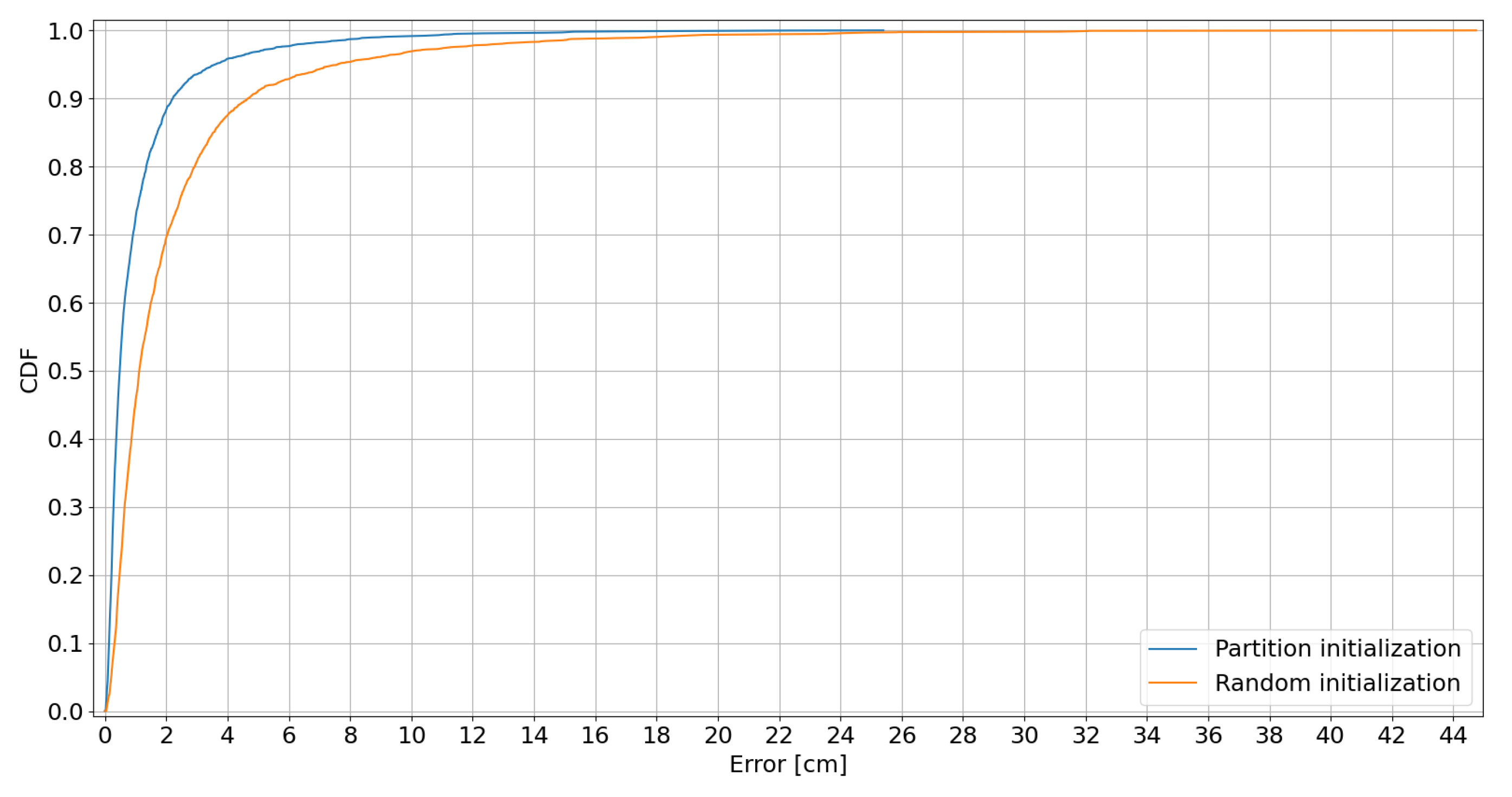
4.3. Enhancing PSO Accuracy via Particle Initialization
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wichmann, J. Indoor positioning systems in hospitals: A scoping review. Digit. Health 2022, 8, 20552076221081696. [Google Scholar]
- Van der Ham, M.; Zlatanova, S.; Verbree, E.; Voûte, R. Real time localization of assets in hospitals using quuppa indoor positioning technology. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 4, 105–110. [Google Scholar] [CrossRef]
- Calderoni, L.; Ferrara, M.; Franco, A.; Maio, D. Indoor localization in a hospital environment using random forest classifiers. Expert Syst. Appl. 2015, 42, 125–134. [Google Scholar] [CrossRef]
- Kamel Boulos, M.N.; Berry, G. Real-time locating systems (RTLS) in healthcare: A condensed primer. Int. J. Health Geogr. 2012, 11, 25. [Google Scholar] [CrossRef]
- Raad, M.W.; Deriche, M.; Kanoun, O. An RFID-based monitoring and localization system for dementia patients. In Proceedings of the 2021 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–7. [Google Scholar]
- Roper, K.O.; Sedehi, A.; Ashuri, B. A cost-benefit case for RFID implementation in hospitals: Adapting to industry reform. Facilities 2015, 33, 367–388. [Google Scholar]
- Chriki, A.; Touati, H.; Snoussi, H. SVM-based indoor localization in wireless sensor networks. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1144–1149. [Google Scholar]
- Romme, J.; van den Heuvel, J.; Dolmans, G.; Selimis, G.; Philips, K.; de Groot, H. Measurement and analysis of UWB radio channel for indoor localization in a hospital environment. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Valencia, Spain, 26–30 June 2017; IEEE: Piscataway, NJ, USA, 2014; pp. 274–279. [Google Scholar]
- Hou, Y.; Yang, X.; Abbasi, Q.H. Efficient AoA-based wireless indoor localization for hospital outpatients using mobile devices. Sensors 2018, 18, 3698. [Google Scholar]
- Li, Z.; Yang, Y.; Pahlavan, K. Using iBeacon for newborns localization in hospitals. In Proceedings of the 2016 10th International Symposium on Medical Information and Communication Technology (ISMICT), Worcester, MA, USA, 20–23 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–5. [Google Scholar]
- Karimpour, N.; Karaduman, B.; Ural, A.; Challenger, M.; Dagdeviren, O. IoT based hand hygiene compliance monitoring. In Proceedings of the 2019 International Symposium on Networks, Computers and Communications (ISNCC), Istanbul, Turkey, 18–20 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Kanan, R.; Elhassan, O. A combined batteryless radio and wifi indoor positioning for hospital nursing. J. Commun. Softw. Syst. 2016, 12, 34–44. [Google Scholar] [CrossRef]
- Aoki, R.; Yamamoto, H.; Yamazaki, K. Android-based navigation system for elderly people in hospital. In Proceedings of the 16th International Conference on Advanced Communication Technology, Pyeongchang, Republic of Korea, 16–19 February 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 371–377. [Google Scholar]
- Bulusu, N.; Heidemann, J.; Estrin, D. GPS-less low-cost outdoor localization for very small devices. IEEE Pers. Commun. 2000, 7, 28–34. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P. Rssi-based indoor localization with the internet of things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Yang, C.; Shao, H.R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location fingerprinting with bluetooth low energy beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Jianyong, Z.; Haiyong, L.; Zili, C.; Zhaohui, L. RSSI based Bluetooth low energy indoor positioning. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Republic of Korea, 27–30 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 526–533. [Google Scholar]
- Saab, S.S.; Nakad, Z.S. A standalone RFID indoor positioning system using passive tags. IEEE Trans. Ind. Electron. 2010, 58, 1961–1970. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Zijin, P.; Tian, L.; Cheng, L.; Mengfu, D.; Gang, C.; Yehuda, K.; Ramdas, P.; Albert, W. Visible Light Communication cyber-physical systems-on-chip for smart cities. In Proceedings of the 2nd IEEE International Conference on Information Communication and Signal Processing (ICSP), Weihai, China, 28–30 September 2019; Volume 2019. [Google Scholar]
- Dawood, M.A.; Saleh, S.S.; El-Badawy, E.S.A.; Aly, M.H. A comparative analysis of localization algorithms for visible light communication. Opt. Quantum Electron. 2021, 53, 108. [Google Scholar]
- Pan, Z.; Carleton, J.; Zeng, S.; Lang, T.; Chen, G.; Kalay, Y.; Pai, R.; Wang, A. Design Implementation of A Hybrid VLP/PLC-Based Indoor Tracking System for Smart Hospitals. In Proceedings of the 2023 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 6–8 January 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–3. [Google Scholar]
- Lang, T.; Pan, Z.; Ortiz, N.; Chen, G.; Kalay, Y.; Pai, R.; Wang, A. Integrated design of low complexity RSS based visible light indoor positioning and power-line communication system for smart hospitals. In Proceedings of the 2021 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 10–12 January 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Ullah, M.H.; Gelli, G.; Verde, F. Visible light backscattering with applications to communication and localization in healthcare: A survey. Procedia Comput. Sci. 2022, 203, 745–752. [Google Scholar] [CrossRef]
- Pan, Z.; Carleton, J.; Zeng, S.; Lang, T.; Chen, G.; Wang, A. Original Research Article Indoor tracking for smart hospital by a hybrid Visible Light Positioning system. J. Auton. Intell. 2023, 6. [Google Scholar]
- Zhou, B.; Lau, V.; Chen, Q.; Cao, Y. Simultaneous positioning and orientating for visible light communications: Algorithm design and performance analysis. IEEE Trans. Veh. Technol. 2018, 67, 11790–11804. [Google Scholar] [CrossRef]
- Cai, Y.; Guan, W.; Wu, Y.; Xie, C.; Chen, Y.; Fang, L. Indoor high precision three-dimensional positioning system based on Visible Light Communication using particle swarm optimization. IEEE Photonics J. 2017, 9, 7908120. [Google Scholar] [CrossRef]
- Karunatilaka, D.; Zafar, F.; Kalavally, V.; Parthiban, R. LED based indoor Visible Light Communications: State of the art. IEEE Commun. Surv. Tutor. 2015, 17, 1649–1678. [Google Scholar]
- Zanella, A. Best practice in RSS measurements and ranging. IEEE Commun. Surv. Tutor. 2016, 18, 2662–2686. [Google Scholar] [CrossRef]
- Albraheem, L.; Alawad, S. A Hybrid Indoor Positioning System Based on Visible Light Communication and Bluetooth RSS Trilateration. Sensors 2023, 23, 7199. [Google Scholar]
- Danys, L.; Zolotova, I.; Romero, D.; Papcun, P.; Kajati, E.; Jaros, R.; Koudelka, P.; Koziorek, J.; Martinek, R. Visible Light Communication and localization: A study on tracking solutions for Industry 4.0 and the Operator 4.0. J. Manuf. Syst. 2022, 64, 535–545. [Google Scholar]
- Kulkarni, V.R.; Desai, V.; Kulkarni, R.V. A comparative investigation of deterministic and metaheuristic algorithms for node localization in wireless sensor networks. Wirel. Netw. 2019, 25, 2789–2803. [Google Scholar]
- IEEE Std 802.15.7-2018; IEEE Standard for Local and Metropolitan Area Networks—Part 15.7: Short-Range Optical Wireless Communications. IEEE SA: Piscataway, NJ, USA, 2018.
- Ghassemlooy, Z.; Popoola, W.; Rajbhandari, S. Optical Wireless Communications: System and Channel Modelling with Matlab®; CRC Press: Boca Raton, FL, USA, 2019. [Google Scholar]
- IEEE std 802.11-2020; IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems—Local and Metropolitan Area Networks—Specific Requirements Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications Amendment 5: Enhancements for Higher Throughput. IEEE SA: Piscataway, NJ, USA, 2020.
- Oguntala, G.; Abd-Alhameed, R.; Jones, S.; Noras, J.; Patwary, M.; Rodriguez, J. Indoor location identification technologies for real-time IoT-based applications: An inclusive survey. Comput. Sci. Rev. 2018, 30, 55–79. [Google Scholar]
- Jacob Rodrigues, M.; Postolache, O.; Cercas, F. Physiological and behavior monitoring systems for smart healthcare environments: A review. Sensors 2020, 20, 2186. [Google Scholar] [PubMed]
- Qadri, Y.A.; Zulqarnain; Nauman, A.; Musaddiq, A.; Garcia-Villegas, E.; Kim, S.W. Preparing wi-fi 7 for healthcare internet-of-things. Sensors 2022, 22, 6209. [Google Scholar] [CrossRef] [PubMed]
- Shao, S.; Khreishah, A.; Rahaim, M.B.; Elgala, H.; Ayyash, M.; Little, T.D.; Wu, J. An Indoor Hybrid WiFi-VLC Internet Access System. In Proceedings of the 2014 IEEE 11th International Conference on Mobile Ad Hoc and Sensor Systems, Philadelphia, PA, USA, 28–30 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 569–574. [Google Scholar] [CrossRef]
- He, L.; Shi, L.; Li, X.; Sun, M. Supermarket Commodity Guide System Based on Indoor Visible Light Positioning. In Proceedings of the 2022 5th World Symposium on Communication Engineering (WSCE), Nagoya, Japan, 16–18 September 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 33–37. [Google Scholar]
- Játiva, P.P.; Azurdia-Meza, C.A.; Sánchez, I.; Seguel, F.; Zabala-Blanco, D.; Firoozabadi, A.D.; Gutiérrez, C.A.; Soto, I. A VLC channel model for underground mining environments with scattering and shadowing. IEEE Access 2020, 8, 185445–185464. [Google Scholar] [CrossRef]
- Guan, W.; Wu, Y.; Wen, S.; Chen, H.; Yang, C.; Chen, Y.; Zhang, Z. A novel three-dimensional indoor positioning algorithm design based on Visible Light Communication. Opt. Commun. 2017, 392, 282–293. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, X.; Guan, W.; Chen, B.; Chen, X.; Xie, C. High-speed 3D indoor localization system based on visible light communication using differential evolution algorithm. Opt. Commun. 2018, 424, 177–189. [Google Scholar]
- Wang, J.; Li, H.; Zhang, X.; Wu, R. VLC-based indoor positioning algorithm combined with OFDM and particle filter. China Commun. 2019, 16, 86–96. [Google Scholar]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Jain, M.; Saihjpal, V.; Singh, N.; Singh, S.B. An overview of variants and advancements of PSO algorithm. Appl. Sci. 2022, 12, 8392. [Google Scholar] [CrossRef]
- Ren, M.; Huang, X.; Zhu, X.; Shao, L. Optimized PSO algorithm based on the simplicial algorithm of fixed point theory. Appl. Intell. 2020, 50, 2009–2024. [Google Scholar] [CrossRef]
- Pham, N.Q.; Rachim, V.P.; Chung, W.Y. High-accuracy VLC-based indoor positioning system using multi-level modulation. Opt. Express 2019, 27, 7568–7584. [Google Scholar] [CrossRef]
- Meng, X.; Jia, C.; Cai, C.; He, F.; Wang, Q. Indoor high-precision 3D positioning system based on visible-light communication using improved whale optimization algorithm. Photonics 2022, 9, 93. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Advantages | Explanation |
|---|---|---|
| Multiwavelength LEDs [29] | ||
| Enhanced precision | Using LEDs with different wavelengths allows for improved precision in distance estimation. Different wavelengths allow the system to account for variations in the environment, such as potential obstructions or reflections, providing a more accurate representation of the actual distance between the transmitter and the receiver. | |
| Mitigation of interference | The use of multiple wavelengths reduces the likelihood of interference with other light sources or electronic equipment in the hospital. This is especially crucial in healthcare settings, where the coexistence of various technologies is common. | |
| RSS Method [30] | ||
| Accuracy in dynamic environments | The RSS method excels in providing accurate distance estimates even in complex and dynamic hospital environments. Its reliance on signal strength allows for real-time adjustments, accommodating changes in the surroundings or potential obstacles, which is particularly vital in areas where equipment or the movement of medical personnel is frequent. | |
| Reduced environmental interference | Unlike some other methods that can be affected by environmental noise, the RSS method is less susceptible to interference, contributing to a more reliable and stable localization process. | |
| PSO Scheme [33] | ||
| Optimized trilateration | Integrating the PSO scheme into the trilateration algorithm optimizes the localization process. PSO enhances the convergence speed of the algorithm, ensuring a faster and more accurate determination of the target location. This is especially advantageous in time-sensitive medical scenarios. | |
| Robustness to non-line-of-sight (NLOS) Situations | PSO aids in overcoming the challenges posed by NLOS scenarios, common in indoor environments. It allows the algorithm to adapt and converge even when the direct line-of-sight (LOS) is obstructed, contributing to the overall robustness of the system. |
| VLP System Features | Values |
|---|---|
| VLC Simulation Parameters | |
| Dimensions of the room () (m) | () |
| Coordinates of the (m) | m, m, m, |
| Power of each (W) | 8 |
| Gain of each optical filter, | Unity Gain |
| Effective area of each , () | |
| Gain of each optical concentrator, | Unity Gain |
| Photoelectric conversion efficiency () | 0.54 |
| FoV of each , (∘) | |
| Lambertian order, | 1 |
| Equivalent noise bandwidth (MHz) | 100 |
| PSO Parameters | |
| Initial particle velocity, | [0,1] |
| Cognitive factor, | 1 |
| Social factor, | 2 |
| Cognitive random parameter, | [0,1] |
| Social random parameter, | [0,1] |
| Iterations | 500 |
| Particles | 100 (space division of ) |
| Inertia weight, w | 0.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Candia, D.A.; Játiva, P.P.; Azurdia Meza, C.; Sánchez, I.; Ijaz, M. Performance Analysis of the Particle Swarm Optimization Algorithm in a VLC System for Localization in Hospital Environments. Appl. Sci. 2024, 14, 2514. https://doi.org/10.3390/app14062514
Candia DA, Játiva PP, Azurdia Meza C, Sánchez I, Ijaz M. Performance Analysis of the Particle Swarm Optimization Algorithm in a VLC System for Localization in Hospital Environments. Applied Sciences. 2024; 14(6):2514. https://doi.org/10.3390/app14062514
Chicago/Turabian StyleCandia, Diego Alonso, Pablo Palacios Játiva, Cesar Azurdia Meza, Iván Sánchez, and Muhammad Ijaz. 2024. "Performance Analysis of the Particle Swarm Optimization Algorithm in a VLC System for Localization in Hospital Environments" Applied Sciences 14, no. 6: 2514. https://doi.org/10.3390/app14062514
APA StyleCandia, D. A., Játiva, P. P., Azurdia Meza, C., Sánchez, I., & Ijaz, M. (2024). Performance Analysis of the Particle Swarm Optimization Algorithm in a VLC System for Localization in Hospital Environments. Applied Sciences, 14(6), 2514. https://doi.org/10.3390/app14062514