
Uncertainty Constraint on Headphone Secondary Path Function for Designing Cascade Biquad Feedback Controller with Improved Noise Reduction Performance

Abstract
1. Introduction
2. Design Method of Feedback Controller
2.1. Parametric Filter
2.2. Feedback Controller
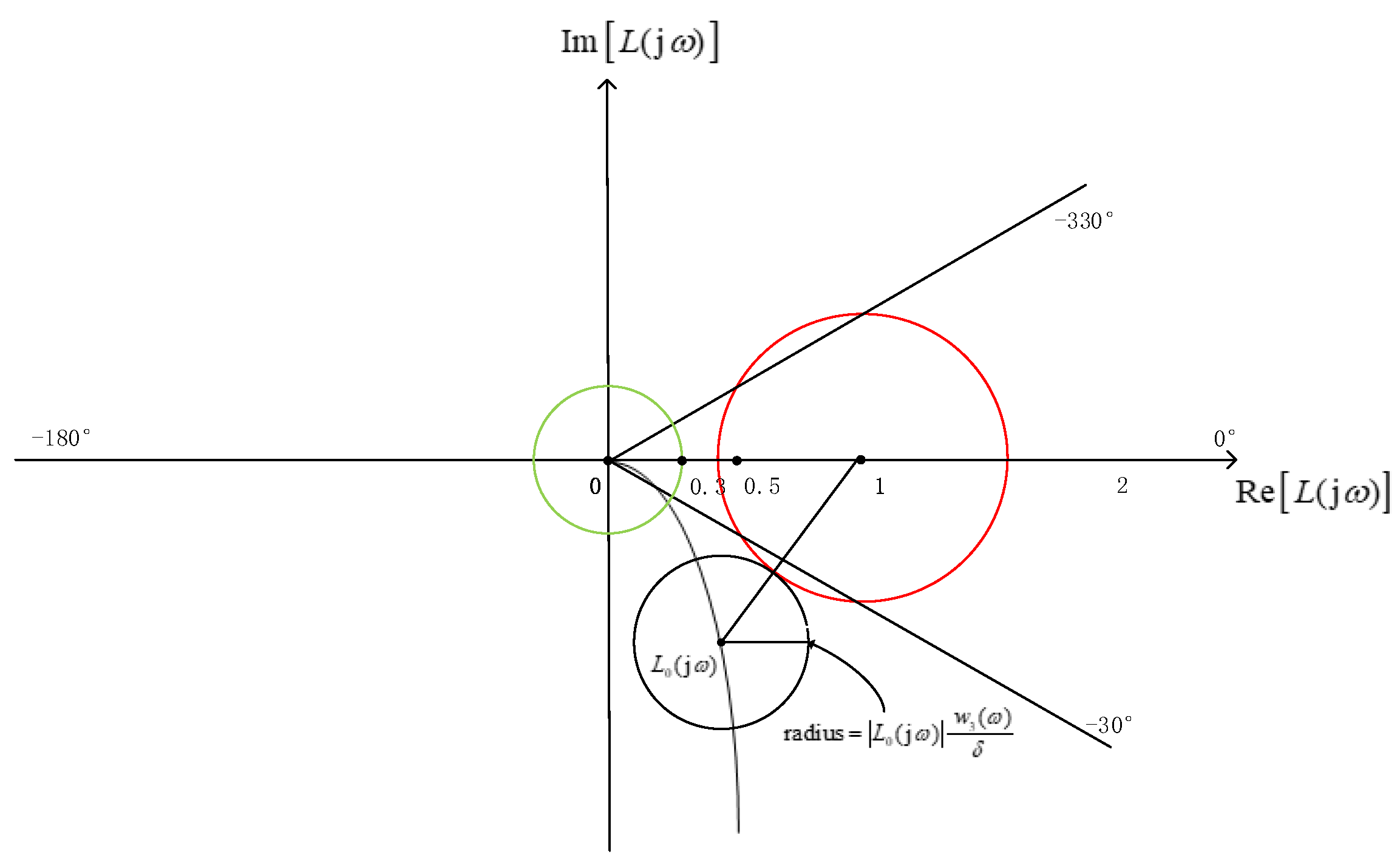
2.3. Secondary Path Uncertainty Constraint
2.4. Control Strategic Function
3. Simulation and Experimental Validation
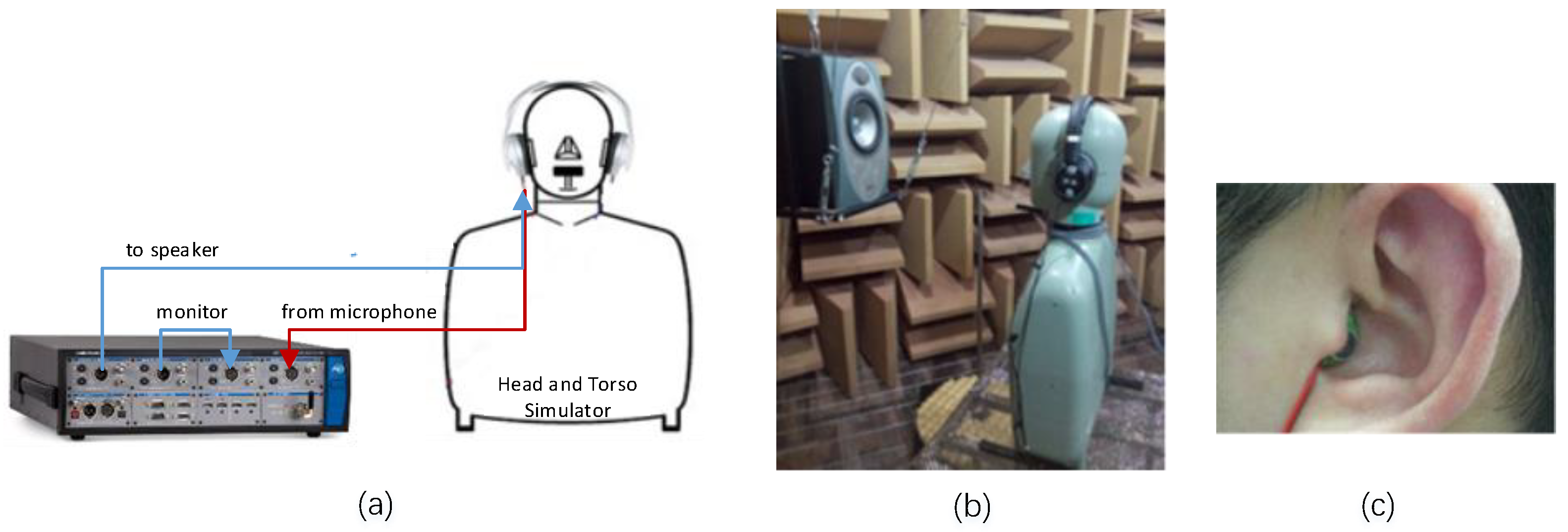
3.1. Test Setting
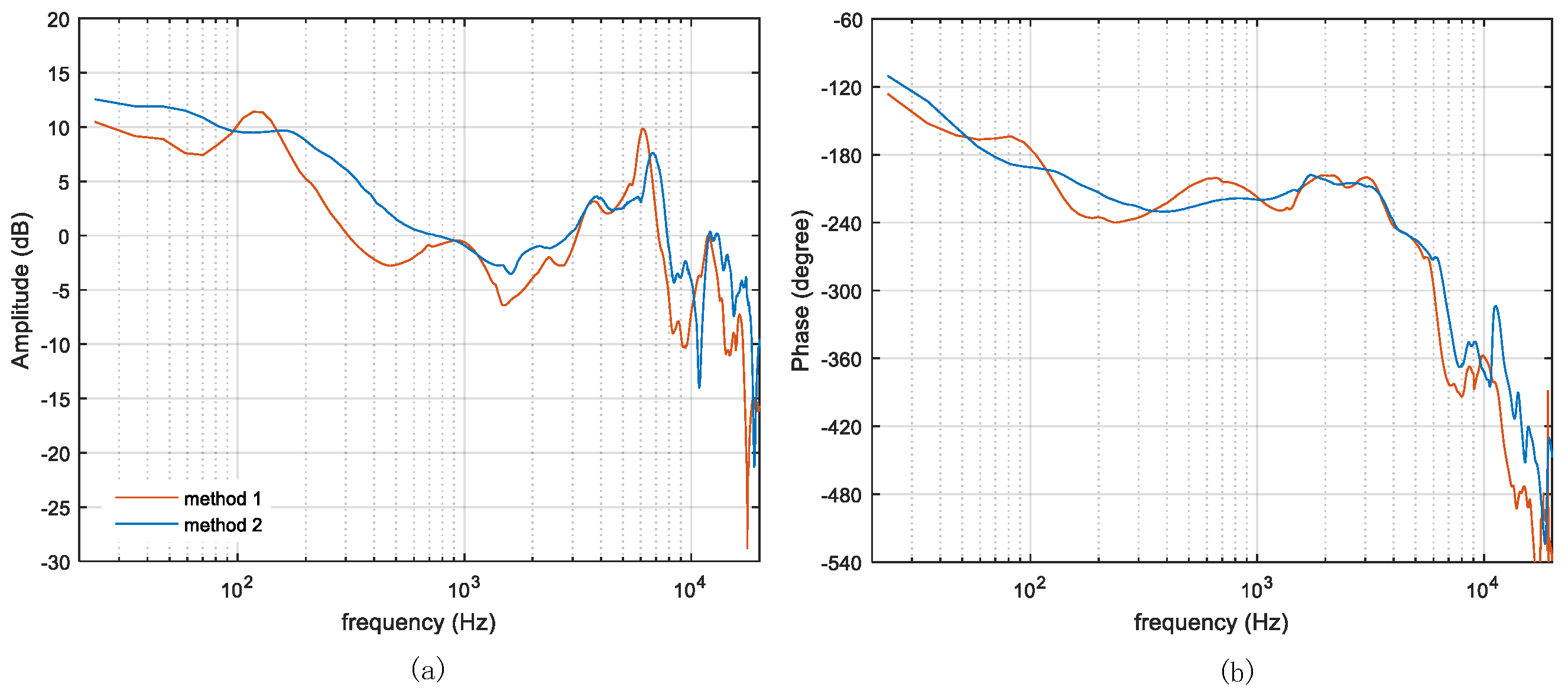
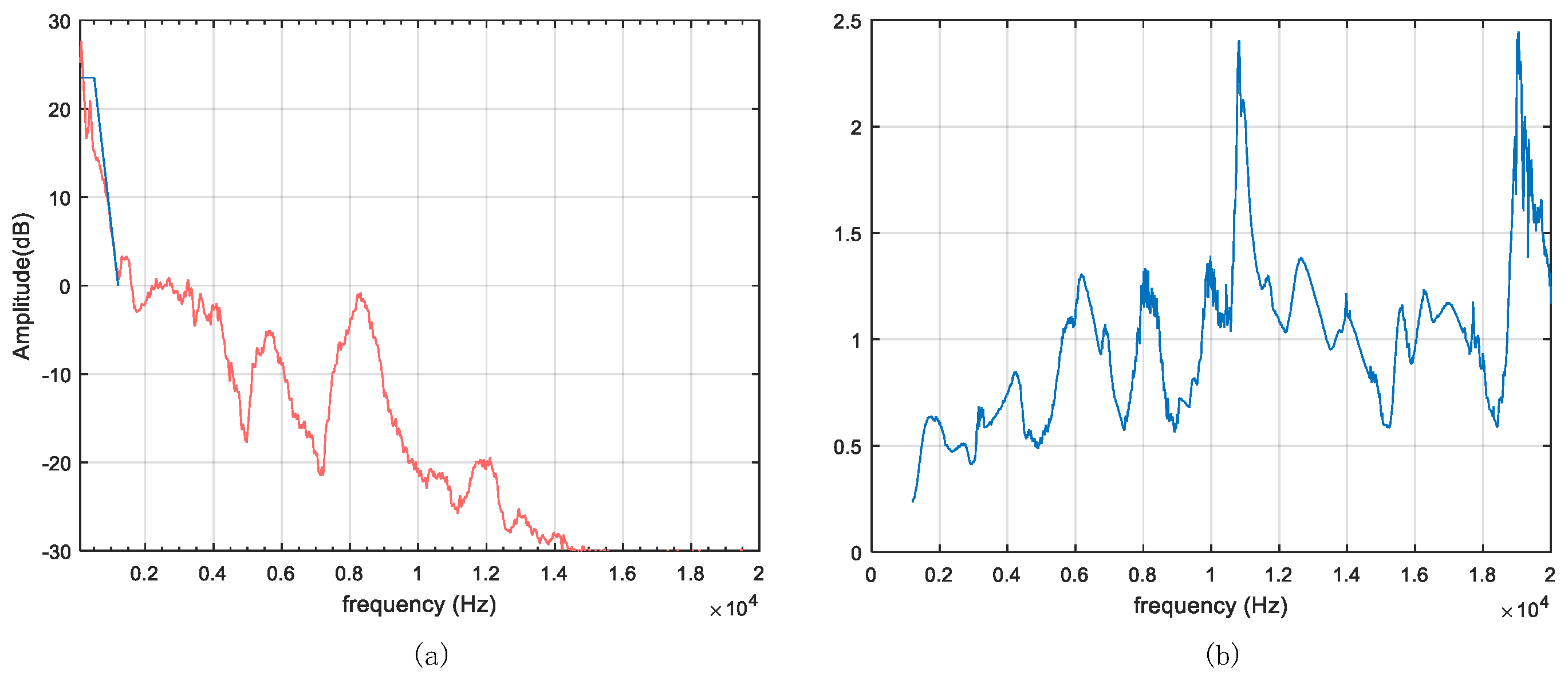
3.2. Controller Optimization and Validation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, J.; Wu, M.; Han, L. A review of sound field control. Appl. Sci. 2022, 12, 7319. [Google Scholar] [CrossRef]
- Bai, M.R.; Pan, W.; Chen, H. Active feedforward noise control and signal tracking of headsets: Electroacoustic analysis and system implementation. J. Acoust. Soc. Am. 2018, 143, 1613–1622. [Google Scholar] [CrossRef] [PubMed]
- Nelson, P.A.; Elliott, S.J. Active Control of Sound; Academic Press: London, UK, 1992. [Google Scholar]
- Elliott, S.J. Signal Processing for Active Control; Academic Press: London, UK, 2001. [Google Scholar]
- Boucher, C.C. The effects of modeling error on the performance and stability of active noise control systems. In Recent Advances in Active Control of Sound Vibration; CRC Press: Boca Raton, FL, USA, 1991. [Google Scholar]
- Zhou, K.; Doyle, J.C.; Glover, K. Robust and Optimal Control; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Rafaely, B. Active noise reducing headset-an overview. In Proceedings of the INTERNOISE and NOISE-CON Congress and Conference Proceedings, The Hague, The Netherlands, 27–30 August 2001; pp. 2144–2153. [Google Scholar]
- Bai, M.R.; Lee, D. Implementation of an active headset by using the H∞ robust control theory. J. Acoust. Soc. Am. 1997, 102, 2184–2190. [Google Scholar] [CrossRef] [PubMed]
- Pawelczyk, M. Analogue active noise control. Appl. Acoust. 2002, 63, 1193–1213. [Google Scholar] [CrossRef]
- Yu, S.H.; Hu, J.S. Controller design for active noise cancellation headphones using experimental raw data. IEEE/ASME Trans. Mechatron. 2002, 6, 483–490. [Google Scholar]
- Liang, K.W.; Hu, J.S. An open-loop pole–zero placement method for active noise control headphones. IEEE Trans. Control. Syst. Technol. 2016, 25, 1278–1283. [Google Scholar] [CrossRef]
- Moon, S.P.; Chang, T.G. The Derivation of the Stability Bound of the Feedback ANC System That Has an Error in the Estimated Secondary Path Model. Appl. Sci. 2018, 8, 210. [Google Scholar] [CrossRef]
- Eriksson, L.J.; Allie, M.C. Use of random noise for on-line transducer modeling in an adaptive active attenuation system. J. Acoust. Soc. Am. 1989, 85, 797–802. [Google Scholar] [CrossRef]
- Morgan, D.R. A Note on ‘A Secondary Path Modeling Technique for Active Noise Control Systems’. IEEE Trans. Speech Audio Process. 1999, 7, 601–602. [Google Scholar] [CrossRef]
- Gan, W.S.; Kuo, S.M. An integrated audio and active noise control headsets. IEEE Trans. Consum. Electron. 2002, 48, 242–247. [Google Scholar] [CrossRef]
- Yang, T.; Hu, L.; Li, X.; Pang, L. An online secondary path modeling method with regularized step size and self-tuning power scheduling. J. Acoust. Soc. Am. 2018, 143, 1076–1084. [Google Scholar] [CrossRef] [PubMed]
- Seiler, P.; Packard, A.; Gahinet, P. An introduction to disk margins [lecture notes]. IEEE Control. Syst. Mag. 2020, 40, 78–95. [Google Scholar] [CrossRef]
- Zhao, J.; Xu, J.; Li, X.D.; Tian, J. Performance optimization of an active noise reduction Headset. In Proceedings of the Inter-Noise 2005, Rio de Janeiro, Brazil, 7–10 August 2005; pp. 222–226. [Google Scholar]
- Guldenschuh, M.; Callafon, R. Detection of secondary-path irregularities in active noise control headphones. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 22, 1148–1157. [Google Scholar] [CrossRef]
- BOSE. On-Head Detection Uses Sensors to Identify When You’re Wearing the Headphones. Available online: https://assets.bose.com/content/dam/Bose_DAM/Web/consumer_electronics/global/products/headphones/QCUH-HEADPHONEARN/pdf/884885_OG_QCUH-HEADPHONEARN_en.pdf (accessed on 1 January 2024).
- SONY. Operations Cannot Be Performed When the Headset Is Removed. Available online: https://helpguide.sony.net/mdr/wh1000xm4/v1/en/contents/TP0002928786.html (accessed on 1 January 2024).
- Bloom, D.R. Automate Left/Right Earpiece Determination. U.S. Patent No. 11184695, 19 April 2012. [Google Scholar]
- Krishnamurthy, N.; Mansour, M.; Cole, R. Implementation challenges for feedback active noise cancellation. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; pp. 1649–1652. [Google Scholar]
- Benois, P.R.; Zolzer, U. Psychoacoustic optimization of a feedback controller for active noise cancelling headphones. In Proceedings of the 26th International Congress on Sound and Vibration (ICSV), Montreal, QC, Canada, 7–11 July 2019. [Google Scholar]
- Boggs, P.; Tolle, J. Sequential Quadratic Programming. Acta Numer. 1995, 4, 1–5. [Google Scholar] [CrossRef]
- Hilgemann, F.; Jax, P. Robust Feedback Active Noise Control in Headphones Based on a Data-Driven Uncertainty Model. In Proceedings of the International Workshop on Acoustic Signal Enhancement (IWAENC), Bamberg, Germany, 5–8 September 2022. [Google Scholar]
- Wang, J.; Zhang, J.; Xu, J.; Zheng, C.; Li, X. An optimization framework for designing robust cascade biquad feedback controllers on active noise cancellation headphones. Appl. Acoust. 2021, 179, 108081. [Google Scholar] [CrossRef]
- An, F.; Wu, Q.; Liu, B. Feedback Controller Optimization for Active Noise Control Headphones Considering Frequency Response Mismatch between Microphone and Human Ear. Appl. Sci. 2022, 12, 977. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Bristow-Johnson, R. Cookbook Formulae for Audio Equalizer Biquad Filter Coefficients. Available online: https://webaudio.github.io/Audio-EQ-Cookbook/audio-eq-cookbook.html (accessed on 1 September 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients | Peaking | High-Shelf |
|---|---|---|
| Head Circumference (cm) | Subject Wears Glasses | Headphones Press the Hair | |
|---|---|---|---|
| Man 1 | 59.1 | No | No |
| Man 2 | 58.1 | Yes | No |
| Woman 1 | 56.5 | No | Yes |
| Woman 2 | 52.8 | Yes | Yes |
| Filter | Parameters | lb | ub | Method 1 | Method 2 |
|---|---|---|---|---|---|
| peaking | (Hz) | 100 | 400 | 351.56 | 312.50 |
| 0.3 | 2 | 0.31 | 0.40 | ||
| (dB) | 10 | 20 | 14.48 | 16.45 | |
| peaking | (Hz) | 4 k | 10 k | 6.60 k | 4.22 k |
| 0.3 | 3 | 0.60 | 0.47 | ||
| (dB) | −30 | −10 | −24.32 | −14.06 | |
| peaking | (Hz) | 2 k | 7 k | 5.94 k | 5.70 k |
| 0.3 | 5 | 3.99 | 1.06 | ||
| (dB) | −10 | 0 | −4.00 | −5.05 | |
| high-shelf | (Hz) | 2 k | 7 k | 4.26 k | 5.63 k |
| 0.3 | 5 | 1.55 | 2.98 | ||
| (dB) | −10 | 10 | 2.78 | −2.83 | |
| peaking | (Hz) | 11 k | 19 k | 13.0 k | 15.0 k |
| 0.3 | 2 | 0.70 | 0.50 | ||
| (dB) | −20 | 0 | −7.04 | −9.02 | |
| 0.0 | 10 | 5.53 | 5.42 |
| Head Circumference (cm) | Subject Wear Glasses | Headphones Press the Hair | |
|---|---|---|---|
| Man 3 | 59.6 | No | Yes |
| Man 4 | 57.3 | No | No |
| Woman 3 | 54.4 | Yes | Yes |
| Woman 4 | 57.1 | No | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hua, Y.; Peng, L. Uncertainty Constraint on Headphone Secondary Path Function for Designing Cascade Biquad Feedback Controller with Improved Noise Reduction Performance. Appl. Sci. 2024, 14, 2236. https://doi.org/10.3390/app14062236
Hua Y, Peng L. Uncertainty Constraint on Headphone Secondary Path Function for Designing Cascade Biquad Feedback Controller with Improved Noise Reduction Performance. Applied Sciences. 2024; 14(6):2236. https://doi.org/10.3390/app14062236
Chicago/Turabian StyleHua, Yang, and Linhui Peng. 2024. "Uncertainty Constraint on Headphone Secondary Path Function for Designing Cascade Biquad Feedback Controller with Improved Noise Reduction Performance" Applied Sciences 14, no. 6: 2236. https://doi.org/10.3390/app14062236
APA StyleHua, Y., & Peng, L. (2024). Uncertainty Constraint on Headphone Secondary Path Function for Designing Cascade Biquad Feedback Controller with Improved Noise Reduction Performance. Applied Sciences, 14(6), 2236. https://doi.org/10.3390/app14062236