
A Rapid and Inexpensive Method for Finding the Basic Parameters of Involute Helical Gears

 , ,
, ,  , and
, and
Abstract
1. Introduction
2. Materials and Methods
2.1. Aspects Concerning the Geometry of Spur Gears with Involute Teeth
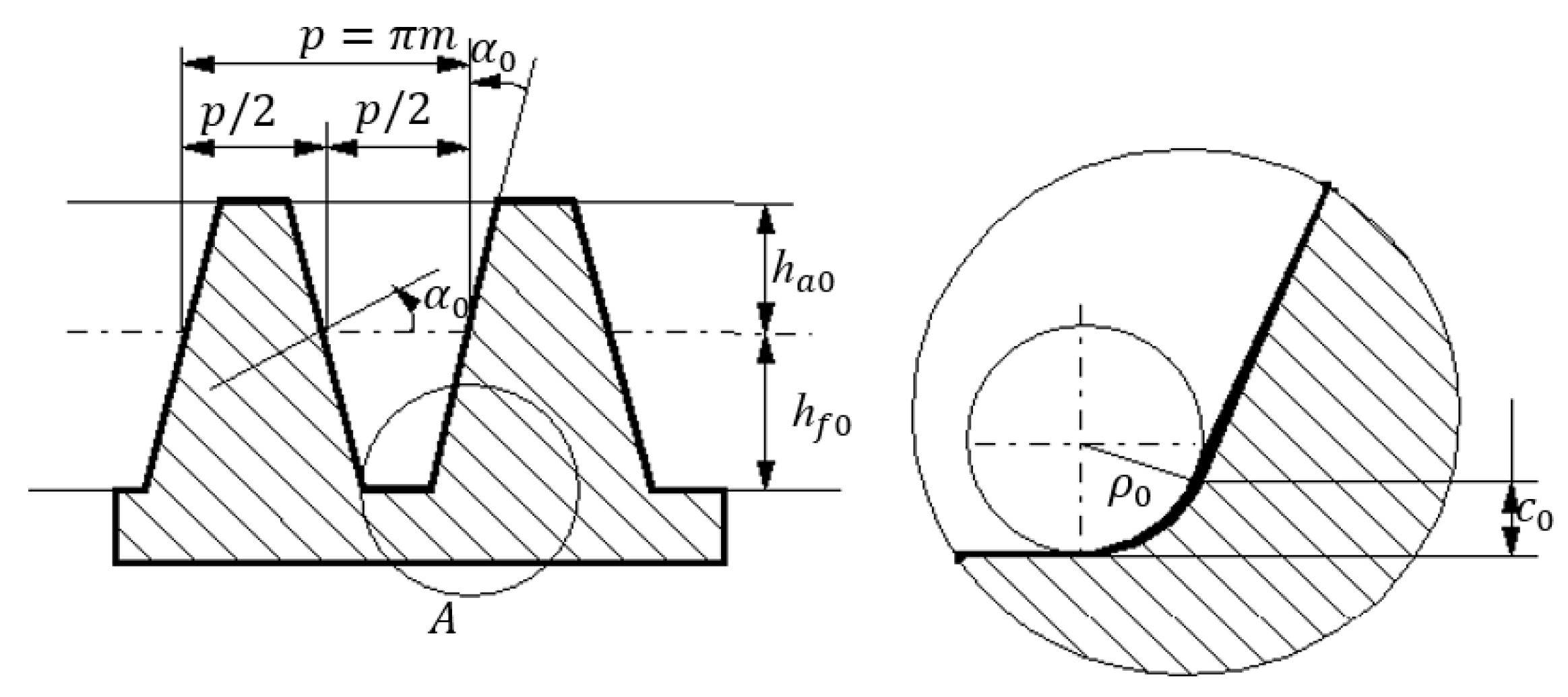
- The addendum, of height
- The dedendum. As can be noticed from the detail A, the tooth is cut on the inferior zone of a length
- The pressure angle of the straight profile:
- The filleting radius at the root of the tooth:
- The gearing is accomplished without backlash between the flanks;
- The gearing is accomplished with standard radial backlash
- 1.
- The number of teeth , which describes the dimension of the wheel;
- 2.
- The module , which describes the dimension of the tooth;
- 3.
- The profile shift coefficient , which describes the shape of the tooth.
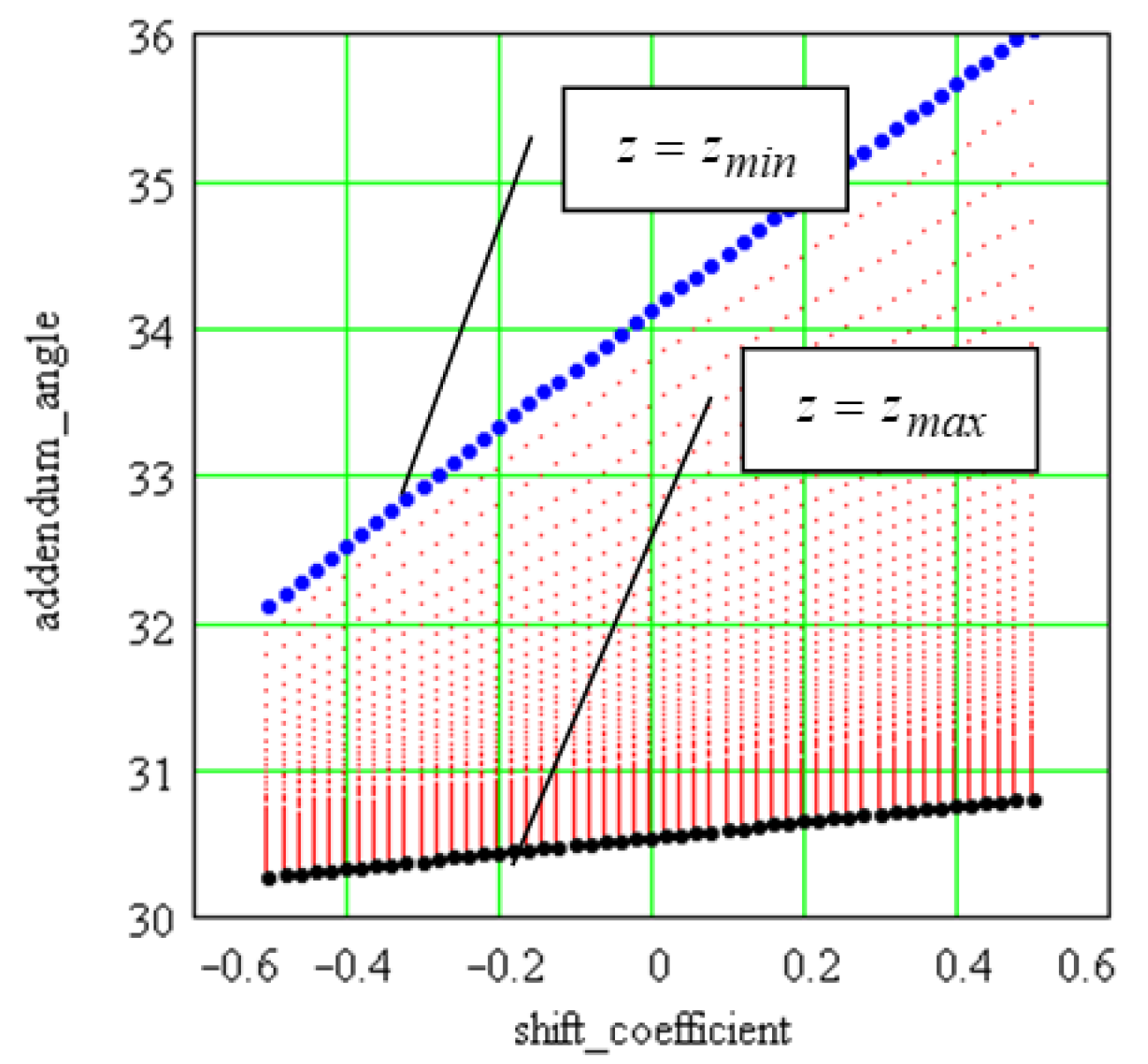
- The first remark is related to the effect of the profile shift coefficient upon the centre distance; in order to achieve a standard centre distance, gear correction must be performed;
- The second observation refers to the gear synthesis methodology; to ensure satisfactory kinematic and dynamic behaviour, a gear mechanism needs to conform to all stipulated conditions for smooth operation. Such criteria can be defined by a condition formulated as follows:where is the number of imposed criteria. For the imposed module, the relation (16) becomes
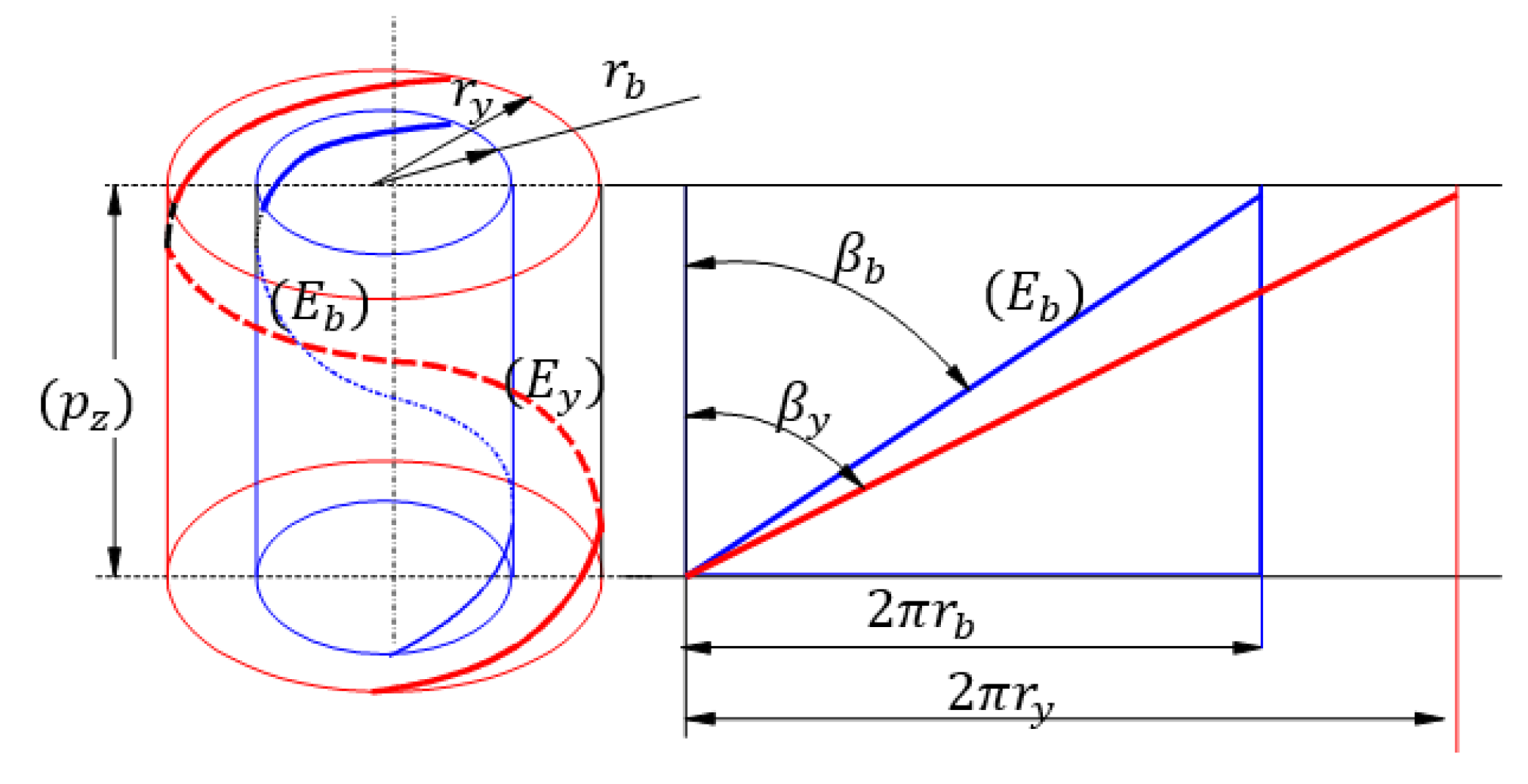
2.2. Helical Gears
- The addendum of the tooth ;
- The dedendum of the tooth .
- Gearing without backlash between flanks;
- Gearing with standard radial backlash;
- The shift of the profile X is the same in both sections.
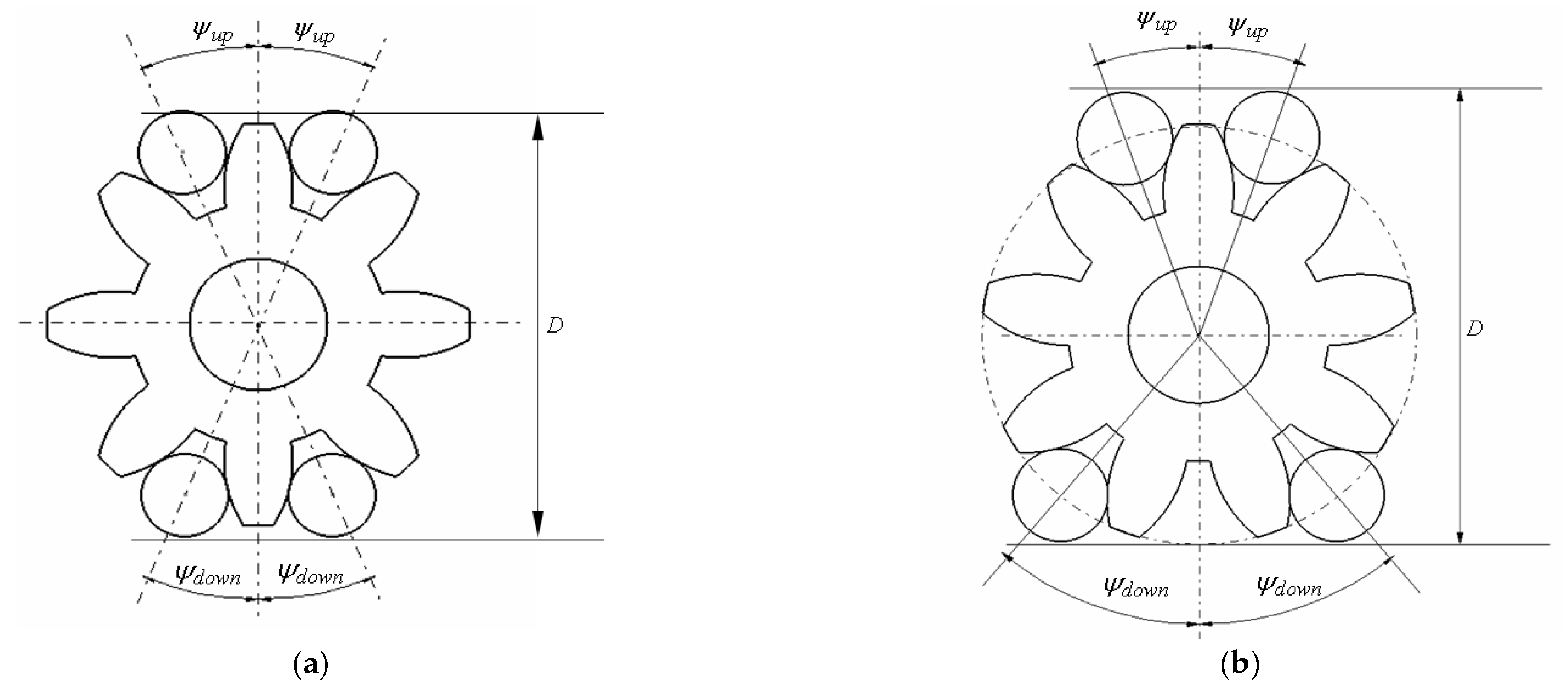
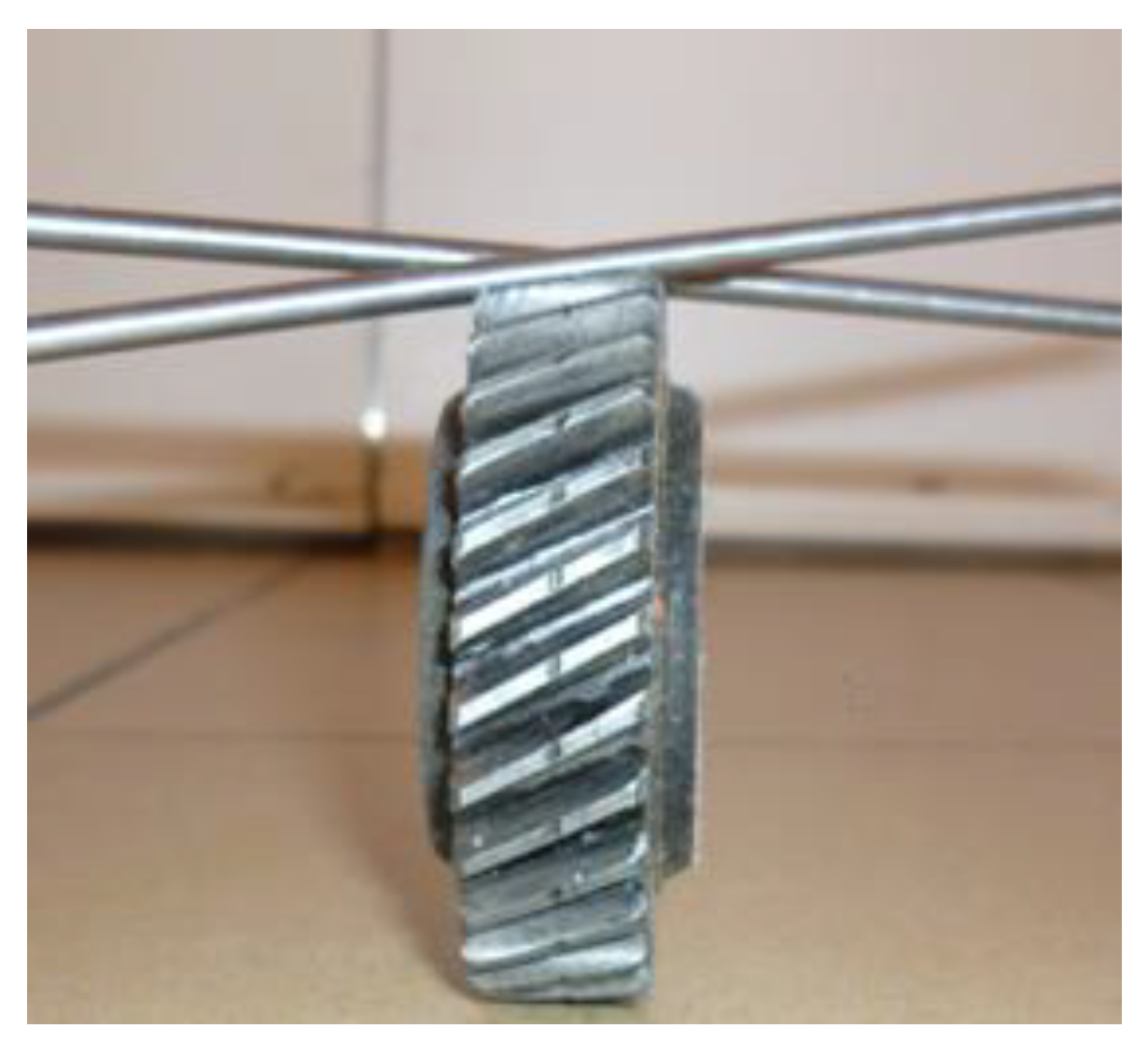
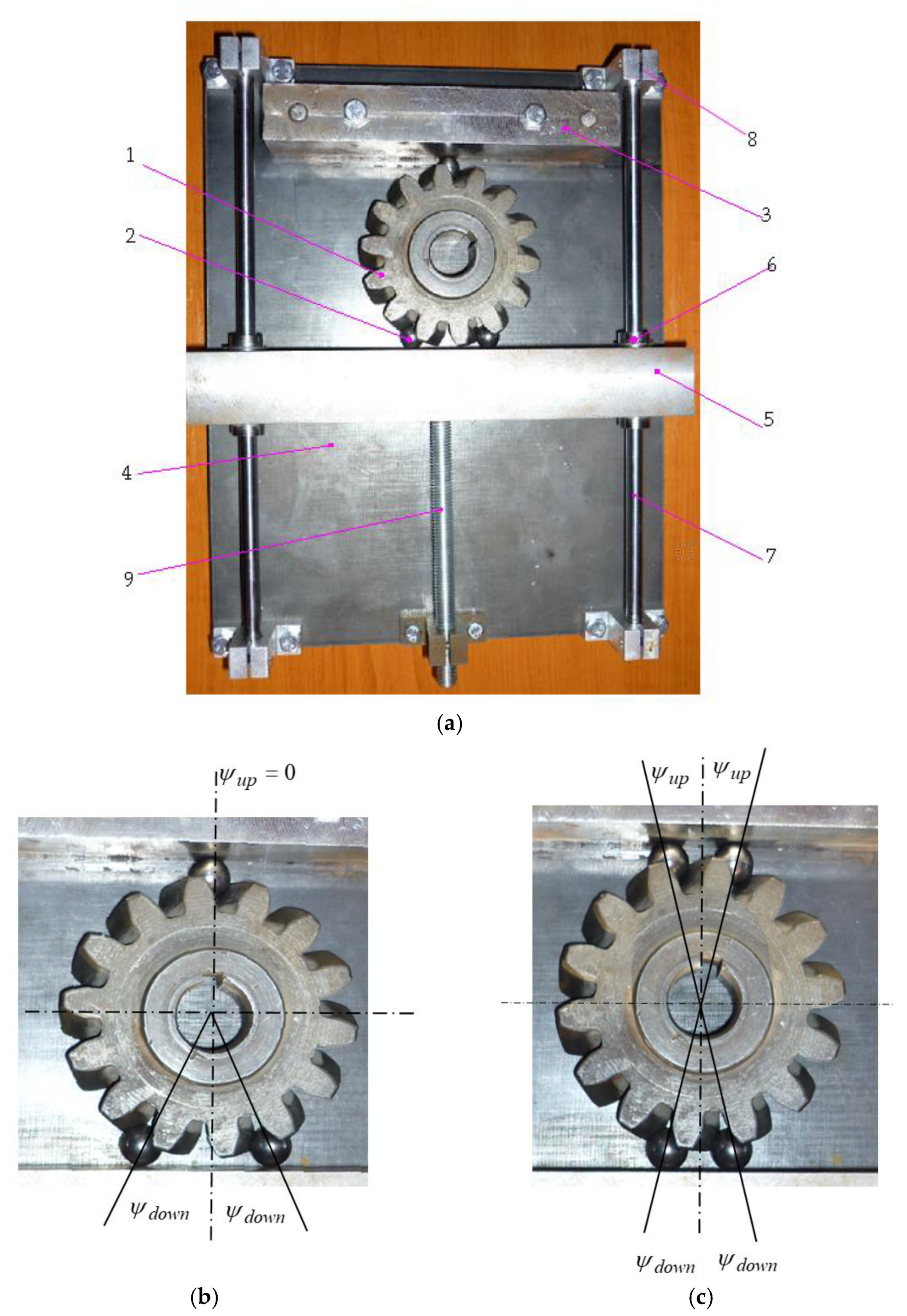
2.3. Method and Device for Finding the Characteristic Parameters of the Helical Gears with Involute Teeth
2.3.1. The Procedure for Finding the Characteristic Parameters of a Helical Gear with Involute Teeth
- The mechanical system formed by the measuring instrument, the two pins, and the measured wheel is not steady, and the distance to be measured is accepted as the maximum value of the distance between the two pins;
- The application of the method varies depending on whether the number of teeth is odd or even.
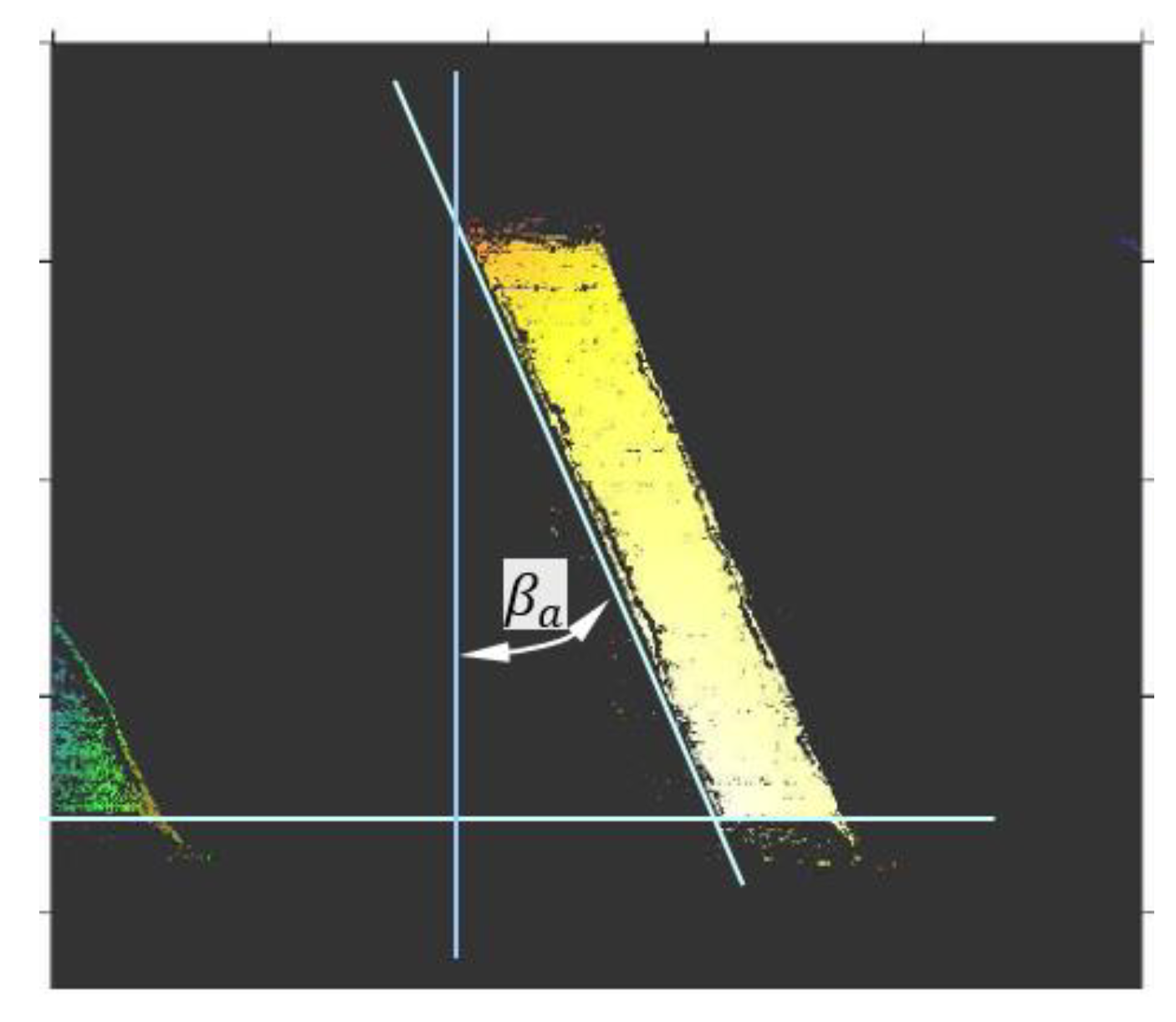
2.3.2. Alternative Method for the Helical Gears
- the frontal module ;
- the frontal pressure angle on the circle passing through the contact points;
- the frontal profile shift coefficient of the gear ;
- The frontal pressure angle on the pitch cylinder of the gear.
- The normal module , which takes standard values;
- The helix angle of the flank on the pitch cylinder of the wheel;
- The normal profile shift coefficient of the wheel.
3. Exemplification of the Methodology
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Freudenstein, F. An Analytical Approach to the Design of Four-Link Mechanisms. ASME Trans. 1954, 76, 483–489. [Google Scholar] [CrossRef]
- Flores, P.; Ambrósio, J.; Pimenta Claro, J.C.; Lankarani, H.M. Kinematics and Dynamics of Multibody Systems with Imperfect Joints; Springer: Berlin/Heidelberg, Germany, 2008; pp. 23–45. [Google Scholar]
- Seherr-Thoss, H.C.; Schmelz, F.; Aucktor, E. Universal Joints and Driveshafts: Analysis, Design, Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 53–79, 109–245. [Google Scholar]
- Dudiţă, F. Mobile Homokinetic Couplings; Tehnică: Bucharest, Romania, 1974; pp. 209–225. (In Romanian) [Google Scholar]
- Innocenti, C. The instantaneous transmission ratio of a driveshaft composed of a tripod joint and a fixed constant velocity joint. Mech. Mach. Theory 2023, 189, 105430. [Google Scholar] [CrossRef]
- Qiu, Y.; Shangguan, W.B.; Lou, Y. Kinematic analysis of the double roller tripod joint. J. Multi-Body Dyn. 2020, 234, 147–160. [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P.; Pulvirenti, F. Review and kinematics of Rzeppa-type homokinetic joints with straight crossed tracks. Mech. Mach. Theory 2015, 90, 142–161. [Google Scholar] [CrossRef]
- Alaci, S.; Doroftei, I.; Ciornei, F.-C.; Romanu, I.-C.; Doroftei, I.-A.; Ciornei, M.-C. A new RP1PR type coupling for shafts with crossed axes. Mathematics 2023, 11, 2025. [Google Scholar] [CrossRef]
- Radzevich, S.P. Theory of Gearing. Kinematics, Geometry and Synthesis, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2023; pp. 79–107. [Google Scholar]
- Phillips, J. General Spatial Involute Gearing; Springer: Berlin/Heidelberg, Germany, 2003; pp. 41–61. [Google Scholar]
- Reuleaux, F. The Kinematics of Machinery: Outlines of a Theory of Machines; Dover Publications: Mineola, NY, USA, 2012; pp. 121–157. [Google Scholar]
- Alaci, S.; Ciornei, F.-C.; Doroftei, I. The conjugate profile of the circular teeth of a spur gear. Part II: Problem solution. IOP MSE 2020, 997, 012068. [Google Scholar] [CrossRef]
- Boral, P.; Gołębski, R.; Kralikova, R. Technological Aspects of Manufacturing and Control of Gears—Review. Materials 2023, 16, 7453. [Google Scholar] [CrossRef] [PubMed]
- Ling, M.; Ling, S.; Li, X.; Shi, Z.; Wang, L. Effect on the measurement for gear involute profile caused by the error of probe position. Meas. Sci. Technol. 2022, 33, 115013. [Google Scholar] [CrossRef]
- Palermo, A.; Britte, L.; Janssens, K.; Mundo, D.; Desmet, W. The Measurement of Gear Transmission Error as an NVH Indicator: Theoretical Discussion and Industrial Application via Low-Cost Digital Encoders to an All-Electric Vehicle Gearbox. Mech. Syst. Signal Process. 2018, 110, 368–389. [Google Scholar] [CrossRef]
- Yuan, B.; Chang, S.; Liu, G.; Wu, L.Y. Quasi-Static and Dynamic Behaviors of Helical Gear System with Manufacturing Errors. Chin. J. Mech. Eng. 2018, 31, 30. [Google Scholar] [CrossRef]
- Colbourne, J.R. The Geometry of Involute Gears—Softcover Reprint of the Original, 1st ed.; Springer: New York, NY, USA, 1987; pp. 191–200. ISBN 978-1-4612-4764-7. [Google Scholar]
- Jalaska, D. Gears and Gear Drives; John Wiley & Sons Ltd.: West Sussex, UK, 2012; pp. 106–155. ISBN 9781119941309. [Google Scholar]
- Jantzen, S.; Neugebauer, M.; Meeß, R.; Wolpert, C.; Dietzel, A.; Stein, M.; Kniel, K. Novel measurement standard for internal involute microgears with modules down to 0.1 mm. Meas. Sci. Technol. 2018, 29, 125012. [Google Scholar] [CrossRef]
- Härtig, F.; Stein, M. 3D involute gear evaluation—Part I: Workpiece coordinates. Measurement 2019, 134, 569–573. [Google Scholar] [CrossRef]
- Stein, M.; Härtig, F. 3D involute gear evaluation—Part II: Deviations—Basic algorithms for modern software validation. Meas. Sci. Technol. 2022, 33, 125003. [Google Scholar] [CrossRef]
- Guo, X.; Shi, Z.; Yu, B.; Zhao, B.; Li, K.; Sun, Y. 3D measurement of gears based on a line structured light sensor. Precis. Eng. 2022, 61, 160–169. [Google Scholar] [CrossRef]
- Stein, M.; Keller, F.; Przyklenk, A. A unified theory for 3d gear and thread metrology. Appl. Sci. 2021, 11, 7611. [Google Scholar] [CrossRef]
- Bolotovskaia, T.F.; Bolotovski, I.A.; Smirnov, V.E. Guide for Gear Profile Shifting; Institutul de Documentare Tehnică: Bucharest, Romania, 1964. (In Romanian) [Google Scholar]
- Alaci, S.; Ciornei, F.-C.; Romanu, I.-C.; Doroftei, I.; Bujoreanu, C.; Tamașag, I. A New Direct and Inexpensive Method and the Associated Device for the Inspection of Spur Gears. Machines 2023, 11, 1046. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
[mm] | [deg] | [deg] | [mm] | [mm] | |
|---|---|---|---|---|---|
| entry 1 | 0 | ||||
| entry 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alaci, S.; Ciornei, F.-C.; Romanu, I.-C.; Doroftei, I.; Bujoreanu, C.; Tamașag, I. A Rapid and Inexpensive Method for Finding the Basic Parameters of Involute Helical Gears. Appl. Sci. 2024, 14, 2043. https://doi.org/10.3390/app14052043
Alaci S, Ciornei F-C, Romanu I-C, Doroftei I, Bujoreanu C, Tamașag I. A Rapid and Inexpensive Method for Finding the Basic Parameters of Involute Helical Gears. Applied Sciences. 2024; 14(5):2043. https://doi.org/10.3390/app14052043
Chicago/Turabian StyleAlaci, Stelian, Florina-Carmen Ciornei, Ionut-Cristian Romanu, Ioan Doroftei, Carmen Bujoreanu, and Ioan Tamașag. 2024. "A Rapid and Inexpensive Method for Finding the Basic Parameters of Involute Helical Gears" Applied Sciences 14, no. 5: 2043. https://doi.org/10.3390/app14052043
APA StyleAlaci, S., Ciornei, F.-C., Romanu, I.-C., Doroftei, I., Bujoreanu, C., & Tamașag, I. (2024). A Rapid and Inexpensive Method for Finding the Basic Parameters of Involute Helical Gears. Applied Sciences, 14(5), 2043. https://doi.org/10.3390/app14052043