
Design of Wheelchair Drive Unit Capable of Driving on Roads and Obstacles with Shape Conversion
Abstract
1. Introduction
2. Electric Wheelchair Design
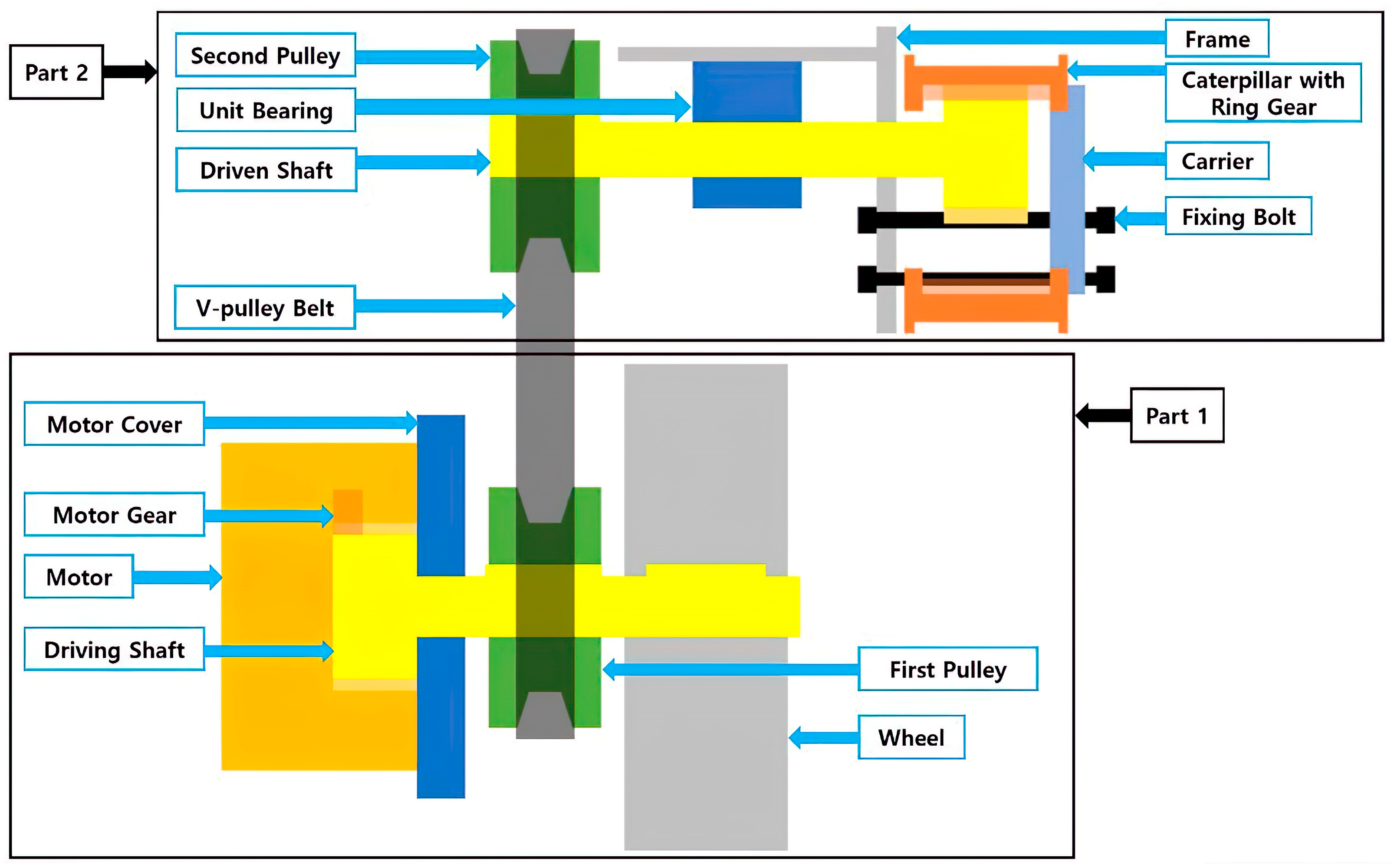
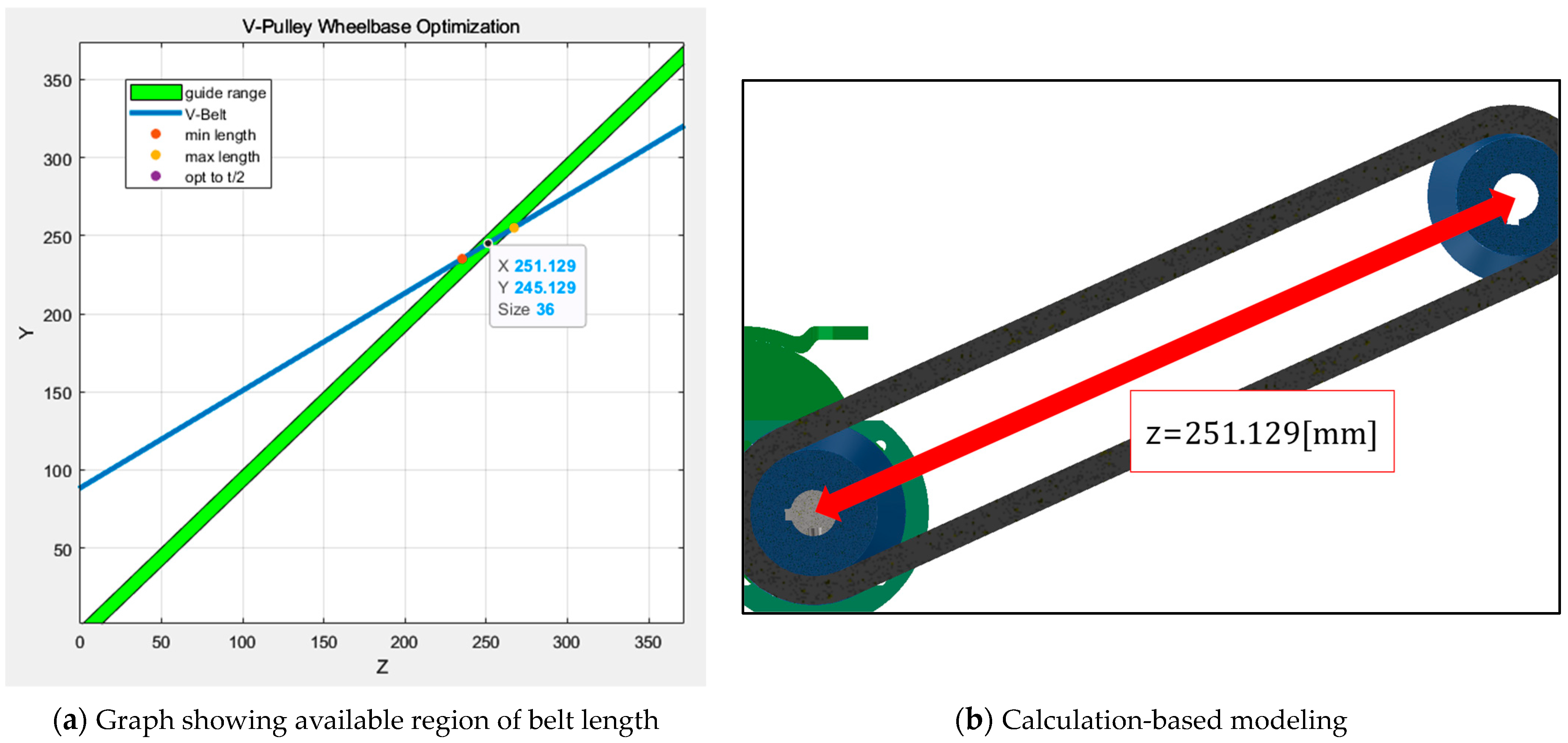
2.1. Power Transmission System of Electric Wheelchair
2.2. Efficiency Based on System Gear
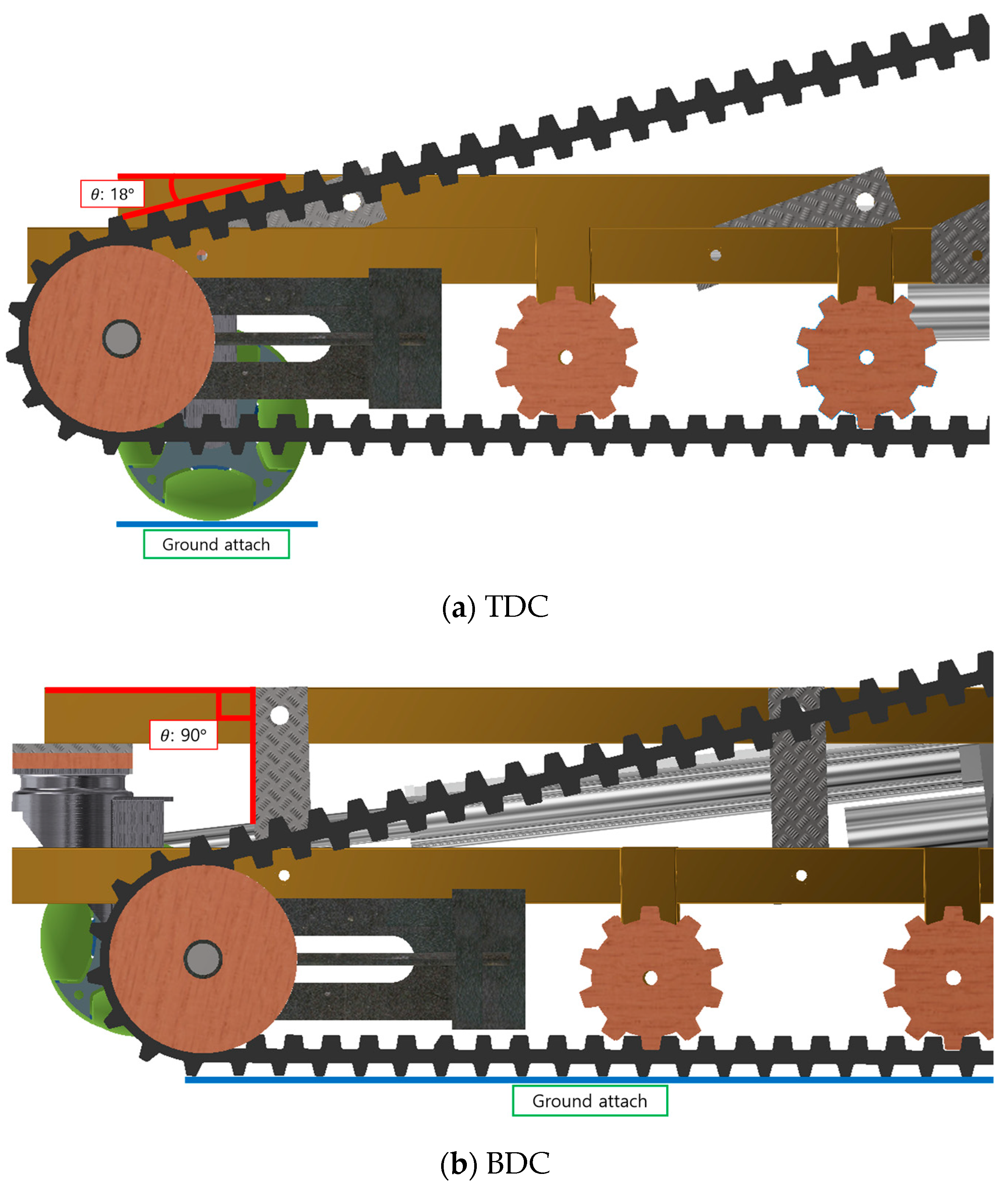
2.3. Drive Mode Mechanism
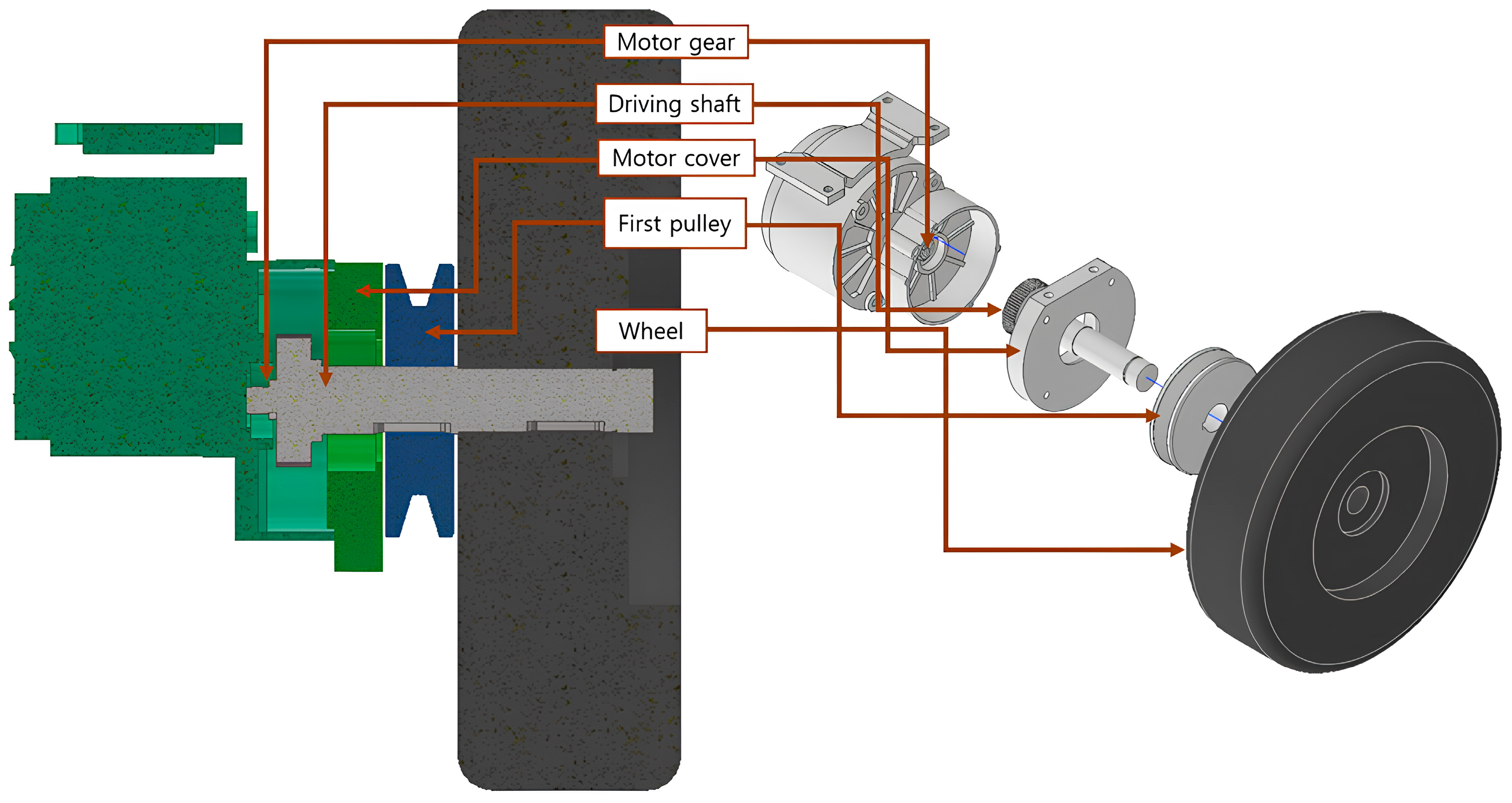
2.3.1. Wheel Drive Mode Mechanism in Part 1
2.3.2. Caterpillar Mode Mechanism in Part 2
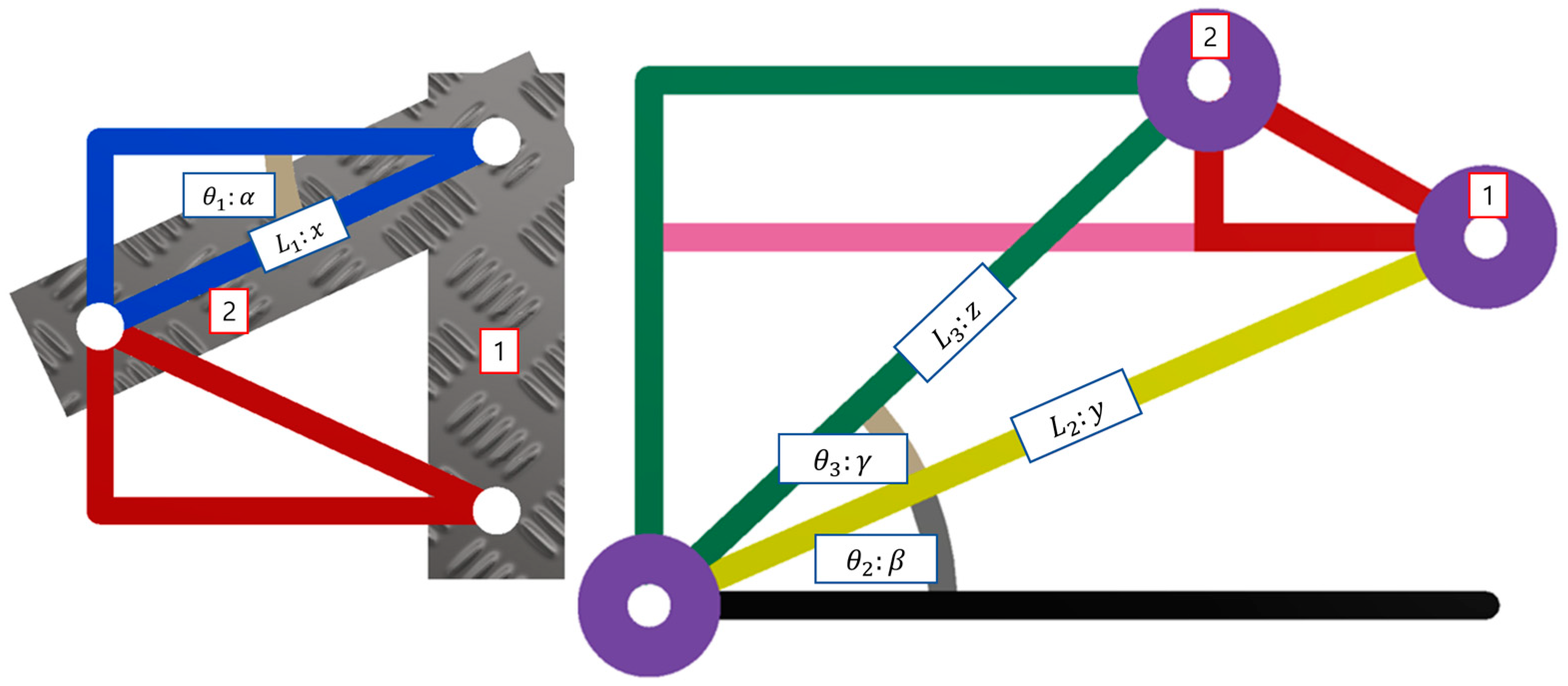
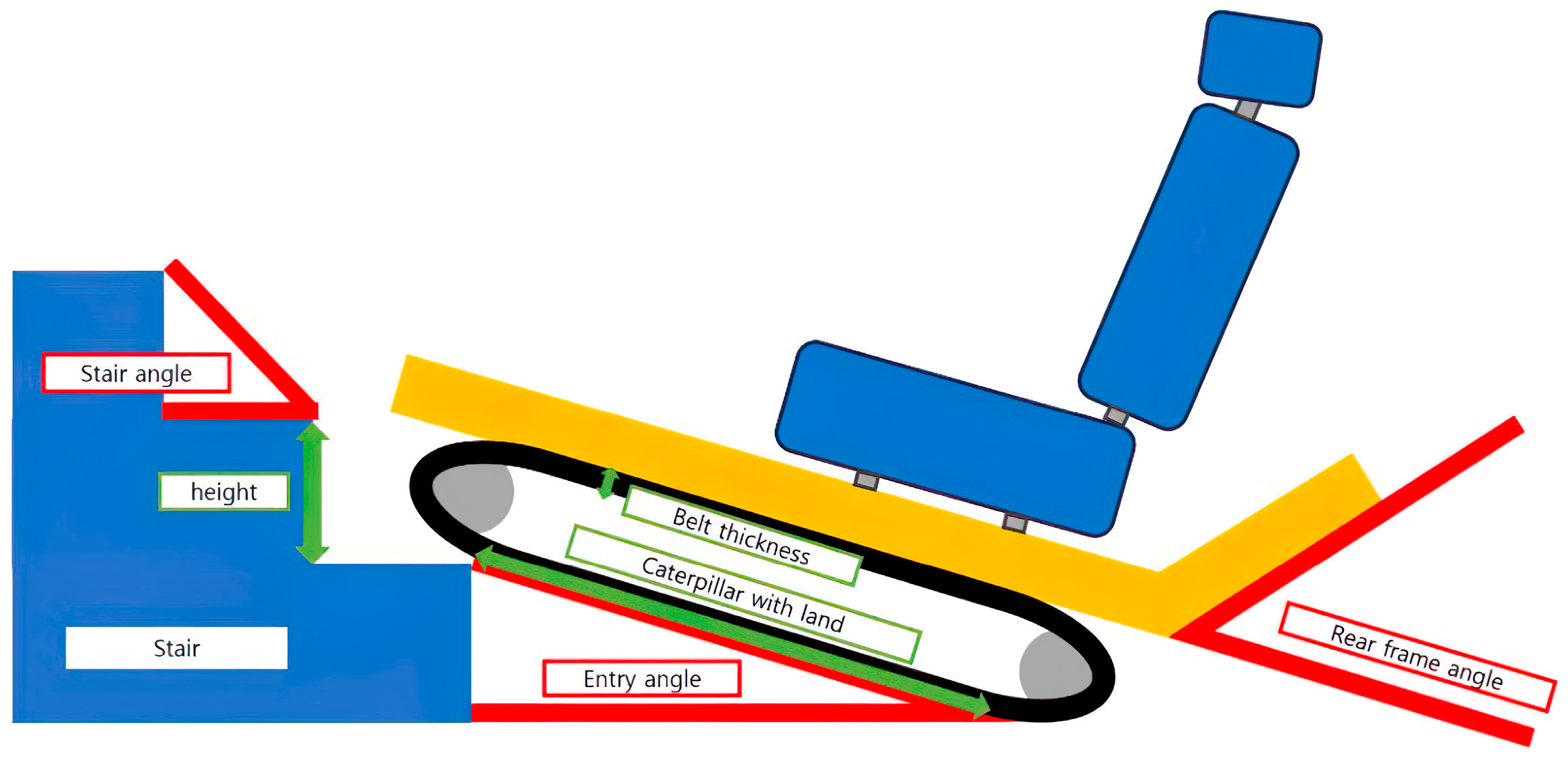
2.4. Key Points in Optimal Design of Electric Wheelchair
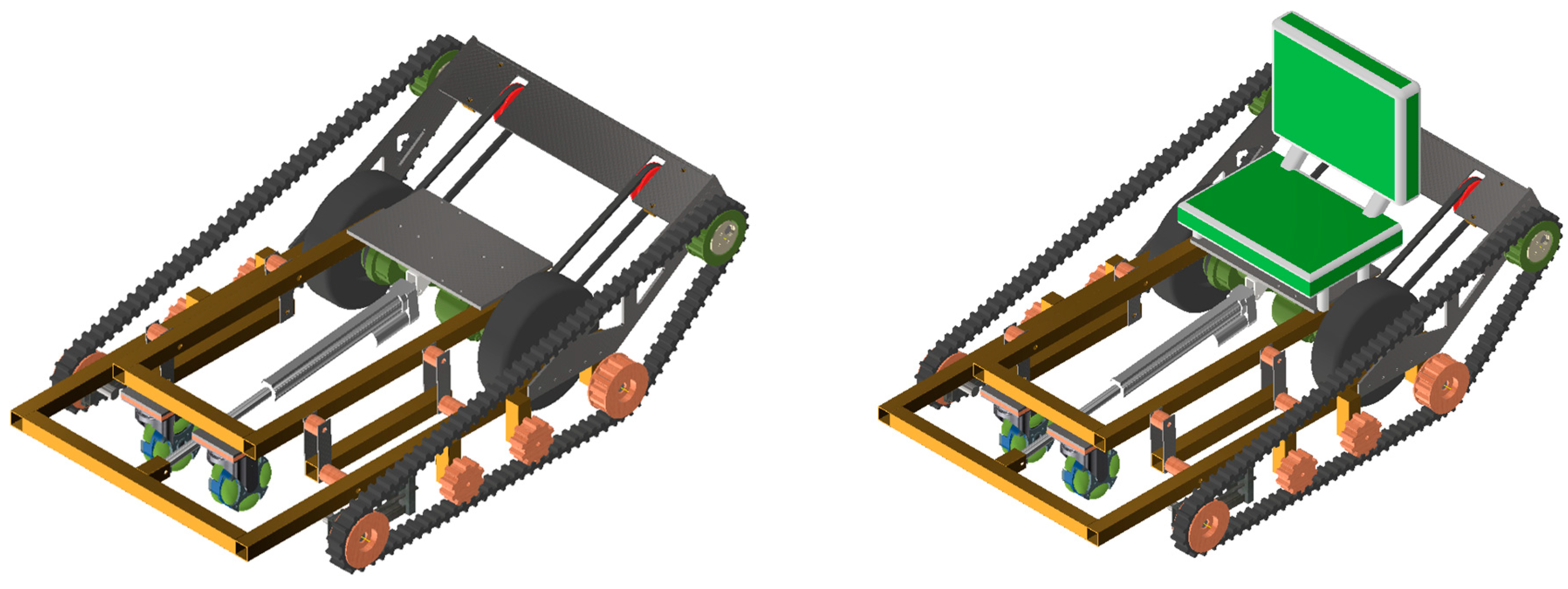
2.5. Electric Wheelchair Concept Design
3. Stress Analysis
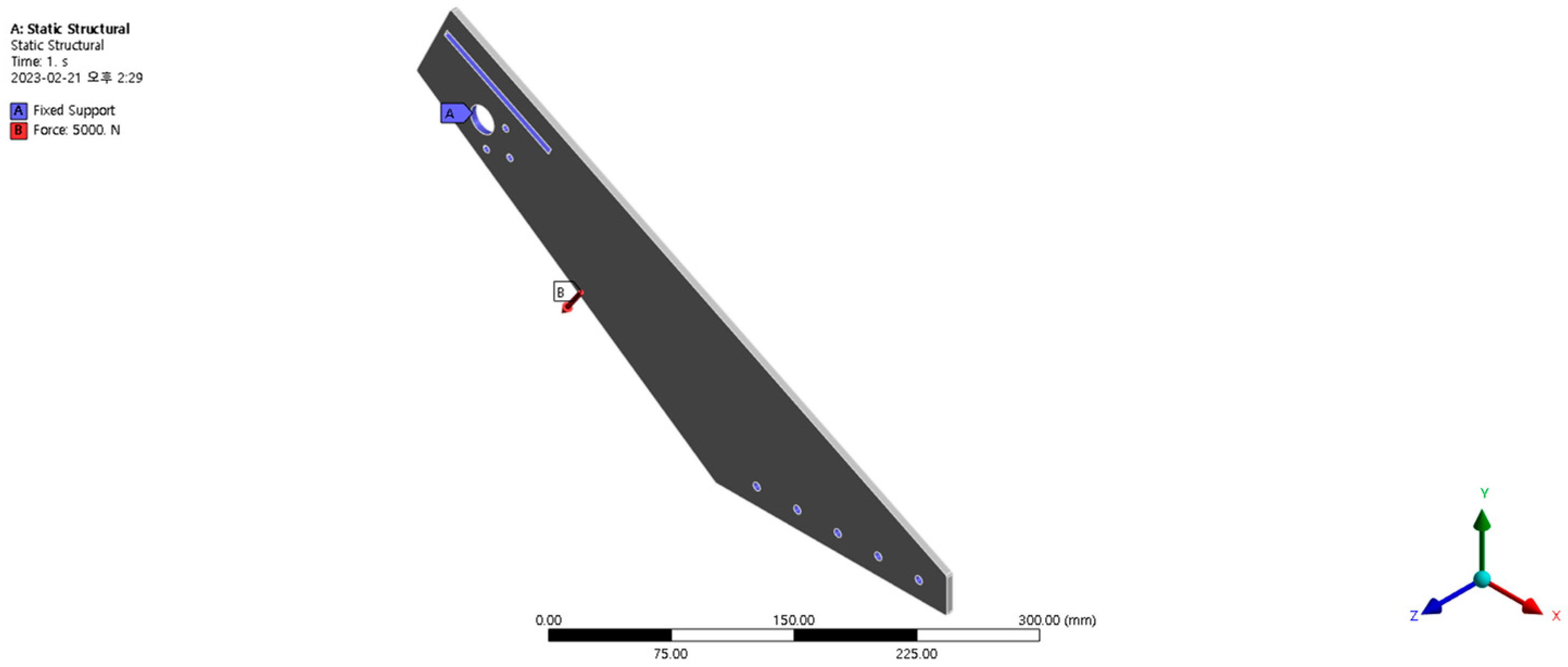
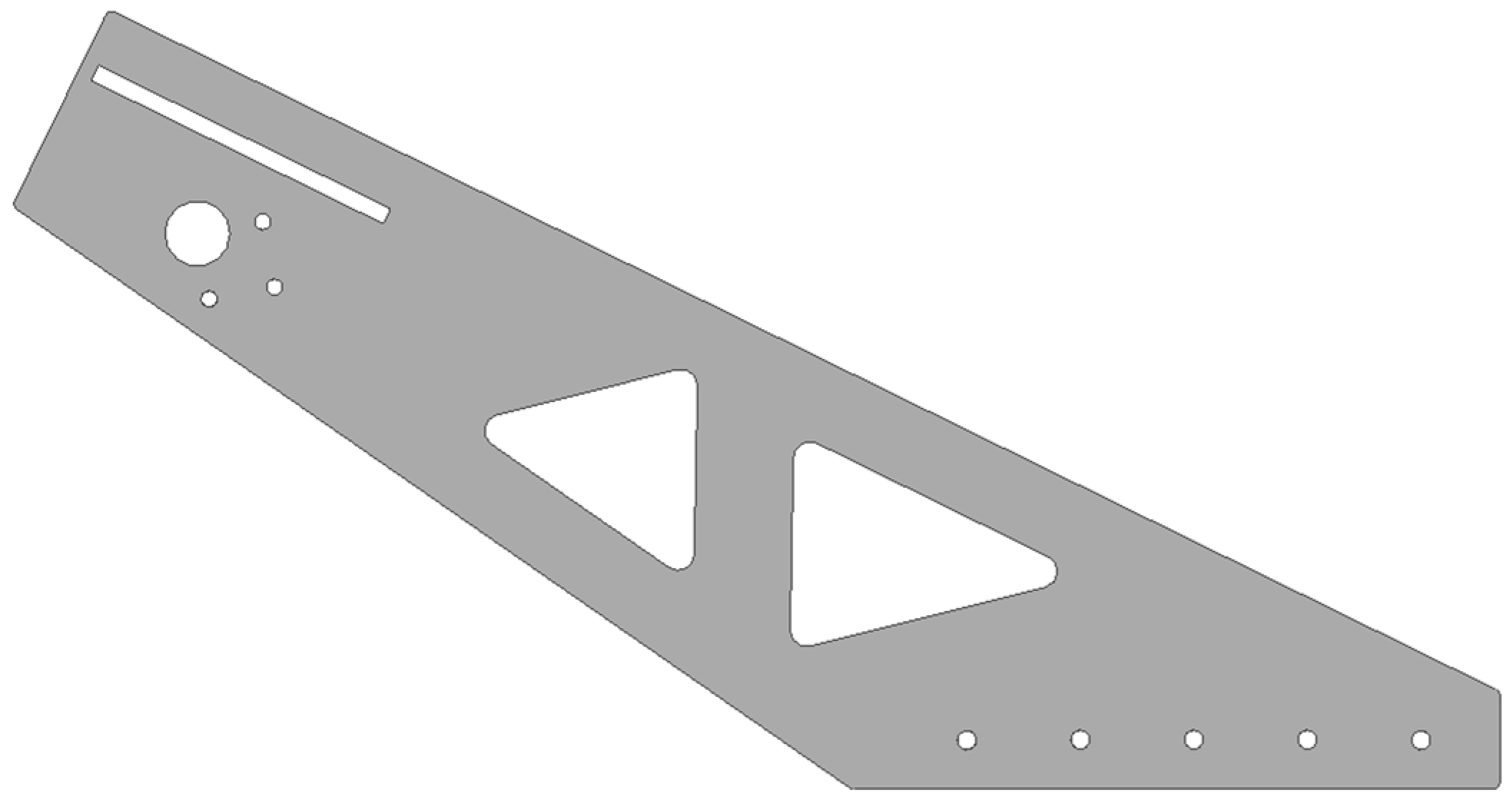
3.1. Frame Optimal Design
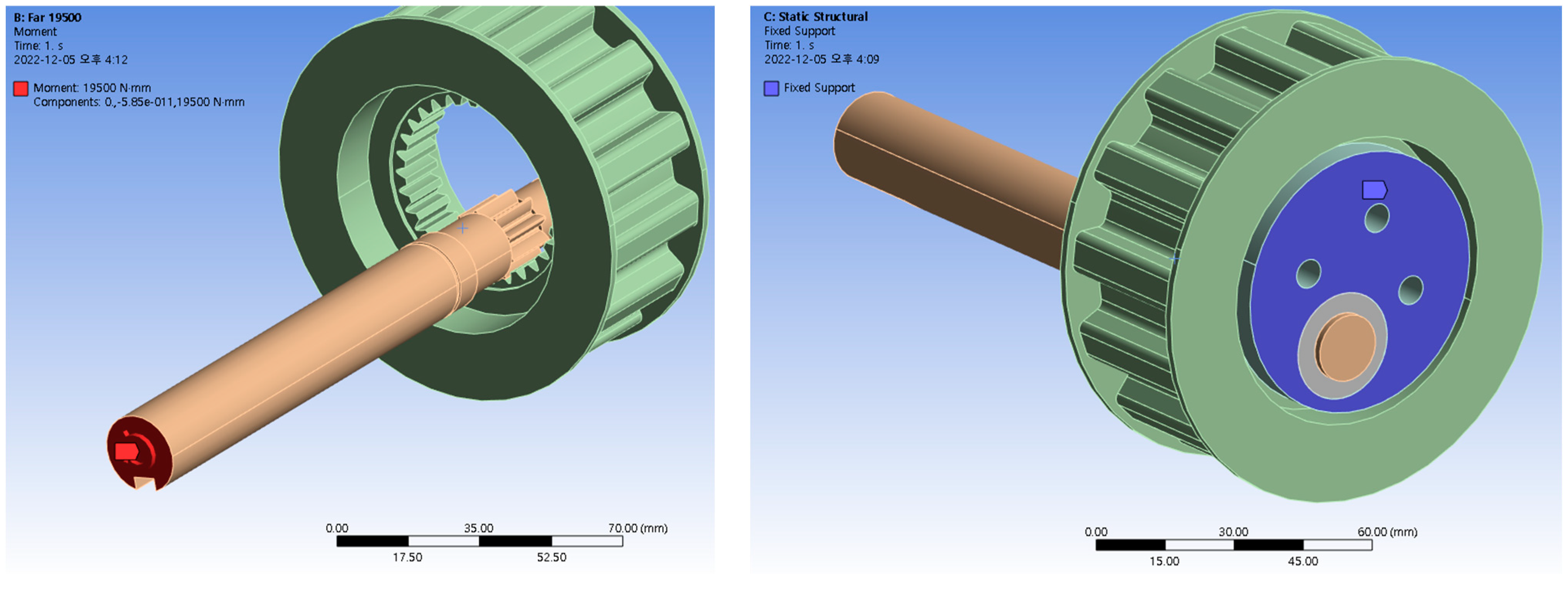
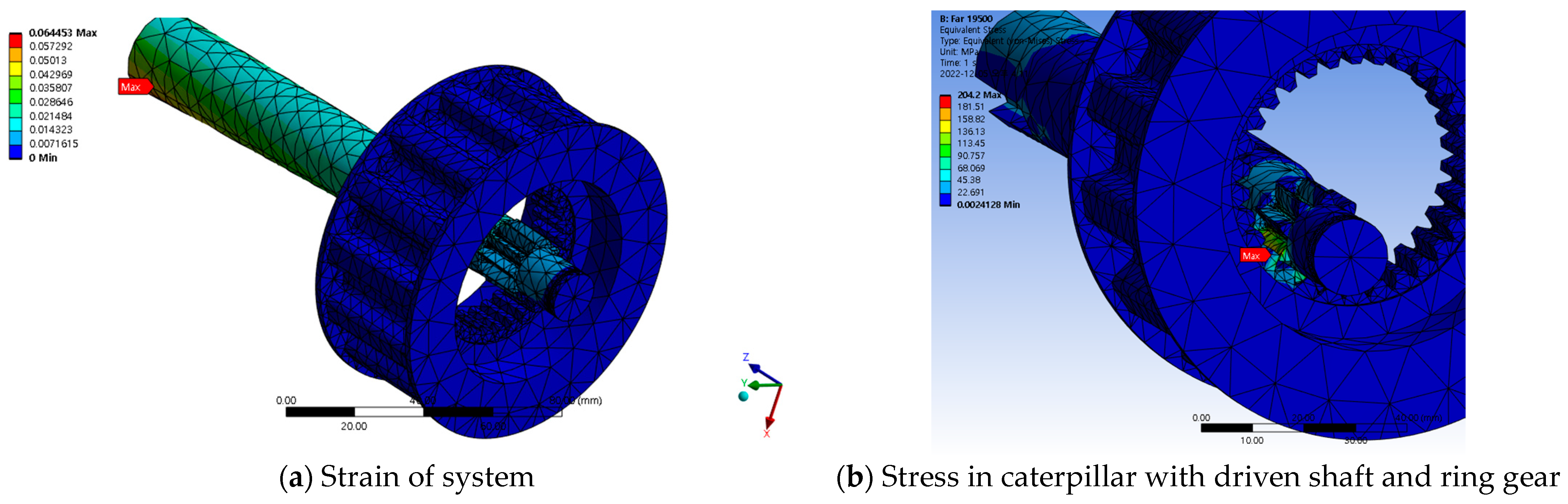
3.2. Gear Stress Analysis
4. Manufacturing Electric Wheelchair
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ikeda, H.; Toyama, T.; Maki, D.; Sato, K.; Nakano, E. Cooperative step-climbing strategy using an autonomous wheelchair and a robot. Robot. Auton. Syst. 2021, 135, 103670. [Google Scholar] [CrossRef]
- Green, J.; Clounie, J.; Galarza, R.; Anderson, S.; Campell-Smith, J.; Voicu, R.C. Optimization of an intelligent wheelchair: Lidar and camera vision for obstacle avoidance. In Proceedings of the 2022 22nd International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 27 November–1 December 2022; pp. 313–318. [Google Scholar]
- Onozuka, Y.; Tomokuni, N.; Murata, G.; Shino, M. Dynamic stability control of inverted-pendulum-type robotic wheelchair for going up and down stairs. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 4114–4119. [Google Scholar]
- Tao, W.; Xu, J.; Liu, T. Electric-powered wheelchair with stair-climbing ability. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417721436. [Google Scholar] [CrossRef]
- Lee, J.; Jeong, W.; Han, J.; Kim, T.; Oh, S. Barrier-free wheelchair with a mechanical transmission. Appl. Sci. 2021, 11, 5280. [Google Scholar] [CrossRef]
- Phannil, N.; Jettanasen, C. Design and Simulation of Removable Pavement Edge Climbing Electric Wheelchair for Elderly and Disabled Users. Int. J. Control. Autom. Syst. 2023, 21, 1910–1925. [Google Scholar] [CrossRef]
- Chocoteco, J.; Morales, R.; Feliu, V.; Sánchez, L. Trajectory planning for a stair-climbing mobility system using laser distance sensors. IEEE Syst. J. 2014, 10, 944–956. [Google Scholar] [CrossRef]
- Sasaki, K.; Eguchi, Y.; Suzuki, K. Stair-climbing wheelchair with lever propulsion control of rotary legs. Adv. Robot. 2020, 34, 802–813. [Google Scholar] [CrossRef]
- Available online: https://robotsguide.com/robots/ibot (accessed on 22 August 2023).
- Available online: https://newatlas.com/topchair-s-stair-climbing-wheelchair/41421/ (accessed on 21 January 2016).
- Available online: https://siamagazin.com/the-stair-climbing-power-wheelchair-topchair-s/ (accessed on 18 December 2019).
- Han, J.O.; Jeong, W.H.; Lee, J.S.; Oh, S.H. The Structure and Optimal Gear Tooth Profile Design of Two-Speed Transmission for Electric Vehicles. Energies 2021, 14, 3736. [Google Scholar] [CrossRef]
- KHK Stock Gears. Gear Technical Reference. Gear Knowledge. Available online: http://khkgears.net/gear-konwledge/gear-technical-reference/ (accessed on 3 April 2021).
- Stacoff, A.; Diezi, C.; Luder, G.; Stüssi, E.; Kramers-de Quervain, I.A. Ground reaction forces on stairs: Effects of stair inclination and age. Gait Posture 2005, 21, 24–38. [Google Scholar] [CrossRef] [PubMed]
- Gao, J.; Gao, X.; Zhu, J.; Zhu, W.; Wei, B.; Wang, S. Light mobile robot power common technique research. In Proceedings of the 2009 International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2009; Volume 1. [Google Scholar]
- Available online: https://digi4home.com/gaghyeongganggwan/ (accessed on 26 April 2023).
- Kang, S.K.; Yang, J.S. Overview of research works regarding welding distortion. J. Weld. Join. 2012, 30, 37–42. [Google Scholar]
- Phillips, K.C.; Gandhi, H.H.; Mazur, E.; Sundaram, S.K. Ultrafast laser processing of materials: A review. Adv. Opt. Photonics 2015, 7, 684–712. [Google Scholar] [CrossRef]
- ‘Longhai’ Steels. Available online: https://www.steelss.com/Carbon-steel/scm420h.html (accessed on 3 June 2022).
- Jeon, H.S.; Oh, S.H. A study on stress and vibration analysis of a steel and hybrid flexspline for harmonic drive. Compos. Struct. 1999, 47, 827–833. [Google Scholar] [CrossRef]
- Vulovic, S.; Zivkovic, M.; Pavlovic, A.; Vujanac, R.; Topalovic, M. Strength Analysis of Eight-Wheel Bogie of Bucket Wheel Excavator. Metals 2023, 13, 466. [Google Scholar] [CrossRef]
- Cong, Y.; Liu, Z.; Wang, X.; Chen, Q.; Wang, L.; Kang, F.; Abi, E. Critical Instability Criterion of Large-Diameter Shafts in Deep Topsoil Based on Ultimate Strain Analysis. Sustainability 2022, 14, 14552. [Google Scholar] [CrossRef]
- Wheelchair Test. Available online: https://youtube.com/watch?v=2h86BtPM6B4&si=YqCkrmElDH5gzUGy (accessed on 28 December 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Inner Gear | Outer Gear | ||
|---|---|---|---|---|
| Number of Teeth | 12 | 60 | ||
| Profile shift coefficient | 0.1 | 0.1 | ||
| Pitch circle diameter = (mm) | 36 | 180 | ||
| Tip diameter = (mm) | 42.00 | 186.00 | ||
| Base diameter = (mm) | 33.83 | 169.14 | ||
| Center distance | 23 | |||
| Module | 3 | |||
| Pressure angle (°) | 20 | |||
| Friction coefficient | 0.05 | |||
| Addendum pressure angle | 35.90 | 24.49 | ||
| Gear meshing ratio | 0.87 | 0.68 | ||
| Efficiency (%) | 97.05 | |||
| Symbol | Unit | Value | |
|---|---|---|---|
| Power | P | W | 250 |
| Torque | T | Nm | 0.8 |
| Speed | N | Rpm | 3300 |
| Voltage | V | V | 24 |
| Current | I | A | 13.4 |
| Reduction ratio | 9.78 | ||
| Reducer efficiency | i | % | 78 |
| Unit | Value | |
|---|---|---|
| Voltage | V | 24 |
| Power | W | 30 |
| Max load | N | 1200 |
| Stroke | Mm | 330 |
| Weight | G | 900 |
| Properties | Value |
|---|---|
| Modulus of elasticity | 190–210 GPa |
| Poisson’s ratio | 0.29 |
| Density | 7.7–8.03 () |
| Yield strength | 1034 MPa |
| Tensile strength | 1158 MPa |
| Component | Material |
|---|---|
| Caterpillar front and rear case | Al alloy 6061 |
| Caterpillar | SCM 440 |
| Sun gear | SCM 440 |
| Bearing front and rear | Structure steel |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, W.; Kwon, M.; Youm, K.; Jeon, H.; Oh, S. Design of Wheelchair Drive Unit Capable of Driving on Roads and Obstacles with Shape Conversion. Appl. Sci. 2024, 14, 1434. https://doi.org/10.3390/app14041434
Jeong W, Kwon M, Youm K, Jeon H, Oh S. Design of Wheelchair Drive Unit Capable of Driving on Roads and Obstacles with Shape Conversion. Applied Sciences. 2024; 14(4):1434. https://doi.org/10.3390/app14041434
Chicago/Turabian StyleJeong, Wonhyeong, Minseo Kwon, Kwangouck Youm, Hansu Jeon, and Sehoon Oh. 2024. "Design of Wheelchair Drive Unit Capable of Driving on Roads and Obstacles with Shape Conversion" Applied Sciences 14, no. 4: 1434. https://doi.org/10.3390/app14041434
APA StyleJeong, W., Kwon, M., Youm, K., Jeon, H., & Oh, S. (2024). Design of Wheelchair Drive Unit Capable of Driving on Roads and Obstacles with Shape Conversion. Applied Sciences, 14(4), 1434. https://doi.org/10.3390/app14041434