1. Introduction
In the rapidly advancing era of intelligent transportation, connected and autonomous vehicles (CAVs) have emerged as a crucial solution for mitigating traffic congestion [
1] and enhancing road safety [
2]. The introduction of this new mixed traffic paradigm has created a complex, dynamic, and boundaryless traffic flow, highlighting the growing importance of highway safety management. As a result, the assessment of highway traffic operational risks and the assurance of safety and efficiency have become critical areas of research, particularly within the transportation field.
Traditional traffic safety research, which primarily relies on historical crash data to establish connections between crash frequencies or severities and contributing factors, faces several challenges: (i) Traffic accidents, accounting for less than 0.01% of all traffic incidents on highways, exhibit characteristics of low probability, high randomness, and unpredictability, making them difficult to directly observe in real-world scenarios; (ii) historical crash data cannot be utilized for real-time or ex-ante analyses [
3]. A promising alternative to overcome these limitations involves the use of near-crash or traffic conflict data [
4], which occur far more frequently than crashes and provide valuable insights for estimating the safety performance of entities on the road network [
5]. Moreover, numerous studies have established statistically significant associations between traffic conflicts and observed crashes [
6,
7,
8].
Since the late 20th century, Surrogate Safety Measures (SSMs) have garnered significant attention and recognition in the field of road traffic safety analysis. With ongoing advancements in traffic collision analysis technologies, new SSMs that go beyond conventional metrics of time, distance, and speed reduction have also emerged. SSMs have contributed substantially to improving transportation safety across diverse domains, including infrastructure assessment, user behavior analysis, and emerging technology evaluation [
9], ultimately supporting policy and strategy development [
8].
Recently, SSMs have gained particular prominence in conflict-based analyses, owing to their capability to identify the temporal or spatial proximity of road users, which facilitates the detection, evaluation, and severity assessment of conflicts or near-misses [
10]. In modern research, SSMs are crucial for evaluating CAV safety during their developmental phases. Given the scarcity of historical and generalizable safety data on CAVs, microsimulation techniques that extract vehicle trajectories and identify traffic conflicts through SSMs have proven effective in addressing data limitations while ensuring robust safety assessment methodologies for emerging autonomous technologies [
9]. However, most simulation environments for safety analysis, which are often restricted to single-lane scenarios, fail to consider the impact of vehicle information interaction within a networked communication context or the effects of lane-changing behavior on safety. Consequently, the SSMs proposed for mixed traffic flows, including CAVs, are predominantly applicable to car-following risks without adequately considering lateral risks.
Research on CAVs has gained significant attention due to their potential to improve safety and traffic operations. However, the technology is not yet mature enough for large-scale deployment. Despite real-world trials and advancements, autonomous vehicles (AVs) are still far from widespread adoption, particularly in safety evaluation [
11]. A transition phase involving mixed traffic, where human-driven vehicles (HDVs), AVs, and CAVs coexist, is expected to persist for a long time [
12]. Thus, CAV studies largely rely on microscopic traffic simulations, and SSMs have been widely adopted to quantify CAV safety benefits based on these simulations [
4].
When a CAV follows an HDV, it cannot achieve cooperative driving due to communication limitations, resulting in the degradation of Cooperative Adaptive Cruise Control (CACC) to Adaptive Cruise Control (ACC) mode. This degradation phenomenon has been extensively studied. For instance, Tu [
13] evaluated the safety impact of CACC degradation on collision risk using the TIT index, finding that sudden deceleration of the leading vehicle significantly increases collision risk. Qin [
14] analyzed the stability and safety of mixed traffic flow with varying CV penetration rates when connected vehicles (CVs) degrade to regular vehicles. Yao [
15] studied CACC vehicles’ degradation into ACC mode due to communication failures, noting that this significantly raises the safety risks in mixed traffic.
These studies considered the functional degradation of CAVs but did not consider the perception–reaction time (PRT) of CAVs. The PRT of intelligent vehicle systems is crucial for evaluating performance, encompassing perception time, decision time, and control time. Compared to HDVs, CAVs have a shorter PRT. Some researchers have conceptually considered time lags in PRT. Li [
16] included the perception–reaction time factor and the safe time headway factor in the ACC model. Peng [
17] designed a new heterogeneous lattice hydrodynamic model, incorporating CAVs and HDVs, to explore the feedback control effect of delayed differences for different vehicle types. In summary, few studies have considered both the degradation of CAVs and their PRT.
Based on the previous discussion, we conducted a search in Scopus to review studies published since 2017. The search used the keywords “mixed traffic flow”, “collision risk”, “car-following behavior”, “lane-changing behavior”, “CAV degradation”, and “perception-reaction time”, as well as their combinations. While several studies address individual factors or partial combinations, no research comprehensively considers all of them.
Therefore, the primary objective of this study is to develop a new comprehensive SSM designed to quantify collision risks in mixed traffic flow. This new SSM considers the combined effects of longitudinal and lateral vehicle interactions. By comparing it with other typical SSMs, the proposed index evaluates the impacts of CAV degradation and PRT, highlighting the differences between these metrics. Through the design, validation, and application of this novel measure, we aim to address the existing research gap regarding the combined effects of CAV degradation and PRT, thereby providing a more scientific tool for the quantitative assessment of safety in mixed traffic flow.
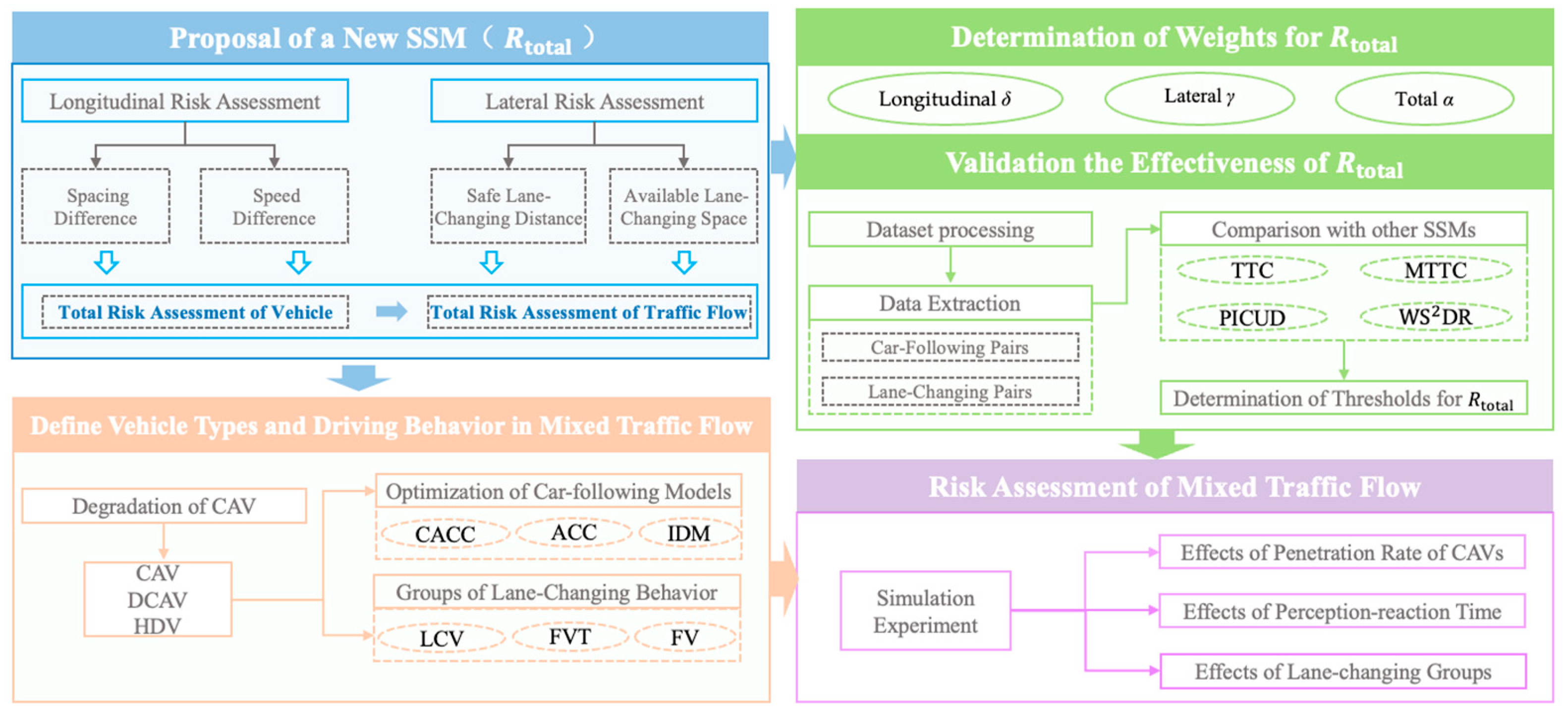
The flowchart of the proposed methodology is shown in
Figure 1. The main contributions of this study are summarized as follows:
- (1)
We introduce a new SSM that incorporates both longitudinal and lateral factors. This metric, denoted as , is utilized to assess the risk level of mixed traffic flow;
- (2)
The weight of each parameter within is ascertained through numerical analysis. The validity of is substantiated using an empirical dataset, and the risk threshold is derived;
- (3)
is used to assess the impact of penetration rate, PRT, and lane-changing combinations on mixed traffic flow safety, contributing to a deeper understanding of safety in mixed-traffic environments
The structure of this paper is as follows.
Section 2 provides an overview and analysis of widely used SSMs.
Section 3 introduces a new SSM (
Rtotal), detailing the determination of weights and thresholds and validation of its effectiveness.
Section 4 optimizes the longitudinal car-following model considering CAV degradation and determines combinations of typical lateral lane-changing behaviors. It further presents the simulation experiments for risk assessment and the analysis of the results. Lastly,
Section 5 summarizes the key findings of our study and outlines future research directions in this field.
4. Evaluating Mixed Traffic Safety with CAV Degradation and Driving Behaviors
Mixed traffic flow safety is influenced by longitudinal and lateral driving behaviors. The proposed risk assessment method captures the impacts of CAV degradation and PRT on these interactions. These behavioral models form the foundation of the simulation-based evaluation. Additionally, various factors, including CAV penetration rates, PRT, and lane-changing modes, are analyzed. This approach enables a comprehensive risk assessment of mixed traffic safety under dynamic and heterogeneous driving conditions.
4.1. Mixed Traffic Flow Considering the Degradation of CAV
In the evolving landscape of Intelligent Transportation Systems (ITS), CAVs leverage Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communications to achieve efficient cooperative control and information sharing, significantly enhancing the overall performance of the vehicle fleet. CAV automation is classified into six levels [
4], and the proportion of fully automated CAVs has not yet been achieved in real-world traffic. Over the next few decades, mixed traffic flow—where CAVs coexist with HDVs—is expected to become a key component of road transportation systems [
21].
In mixed-traffic environments, when a CAV follows an HDV, V2V communication cannot encompass the HDV, and real-time information about the HDV ahead cannot be obtained. This limits the CAV’s ability to fully utilize cooperative control, leading to a phenomenon known as system degradation, where the CAV effectively becomes a degraded CAV (DCAV), as illustrated in
Figure 10.
CAVs are equipped with a CACC system. The primary advantage of CACC lies in its ability to share real-time data on the speed, acceleration, and other parameters of the vehicle ahead through V2V communication, enabling precise distance control and cooperative car-following. However, when a CAV degrades into a DCAV, it must rely solely on onboard sensors and the ACC system for car-following, which may hinder its ability to respond quickly to sudden events. As the penetration rate of CAVs decreases, the probability of such degradation increases, thereby elevating the risk of traffic accidents.
4.2. Car-Following Behavior
PRT is a critical factor influencing vehicle dynamics and traffic stability. Human drivers do not respond instantaneously to changes in their environment. The PRT encompasses the interval between a driver perceiving a stimulus (such as a vehicle slowing down) and initiating a corresponding response (such as braking). This delay can significantly impact vehicle-following behavior, especially in scenarios involving sudden decelerations or high-density traffic conditions.
For CAV, PRT constitutes the interval between the detection of a change in the driving environment and the initiation of an appropriate response by the vehicle’s control system. This temporal delay encompasses several critical components, including the time required for sensor data acquisition and processing, communication latency inherent in V2V interactions, decision-making processes within the vehicle’s control algorithms, and the actuation latency associated with executing control commands such as braking or acceleration. Understanding and accurately modeling PRT is essential for predicting and enhancing the responsiveness and safety of CAVs in dynamic traffic conditions
4.2.1. HDV
The IDM (Intelligent Driver Model) is a car-following model widely used to simulate human driving behavior [
23]. The IDM model is well-suited to human driving behavior because it incorporates natural driving tendencies and adjusts the driving style in different traffic situations. It is especially effective at capturing how human drivers follow each other in a dynamic and adaptive way.
Despite its effectiveness, the traditional IDM does not explicitly account for the driver’s PRT. Incorporating perception–reaction time into the IDM allows for a more nuanced representation of driver behavior, accounting for the inherent delays in human response. This adjustment is essential for enhancing the model’s applicability in safety analyses, traffic management strategies, and the development of advanced driver-assistance systems (ADAS).
For HDVs,
h is used to represent their PRT, denoted as PRT_
HDV. To integrate PRT within the IDM framework, the acceleration of a following vehicle is redefined to consider the driver’s delayed response and physical braking constraints. The comprehensive formulation is presented below in Equation (14).
where the expected distance between two vehicles
is recalculated based on the vehicle’s state at time
, as shown in Equation (15):
where
: Acceleration of the vehicle at time
Maximum acceleration
: Current speed of the vehicle
: Desired (free-flow) speed
: Acceleration exponent, typically set to 4
: Current headway (distance to the leading vehicle)
: Minimum desired headway
Th: Safe time headway
b: Desired deceleration
The calibration of IDM parameters, as shown in
Table 4, is based on empirical traffic flow data from German highways [
23]. It was achieved through theoretical modeling, optimization fitting methods, and simulation validation to ensure an accurate representation of traffic flow dynamics.
4.2.2. CAV
Integrating PRT into the CACC model is pivotal for accurately simulating the behavior of CACC-equipped CAVs in real-world traffic scenarios. CACC model has been validated through empirical studies conducted by the PATH Laboratory at the University of California, Berkeley [
24]. For DCAVs,
is used to represent their PRT, denoted as PRT_
CAV. The modified CACC model considering PRT is given by the following equations:
Spacing Error is given by Equation (16):
Velocity Update (
) is given by Equation (17):
From Equations (16) and (17),
where
: Velocity of the subject vehicle at the previous control time , where is the control interval.
: Proportional gain parameter for the spacing error, determining the responsiveness of the CACC system to deviations in spacing.
: Spacing error at time , representing the delayed perception of the leading vehicle’s state.
: Derivative gain parameter for the relative speed, influencing the system’s response to the rate of change of the spacing error.
: Time derivative of the spacing error at time , indicating the rate at which the spacing error is changing.
The parameters of the CACC model, as shown in
Table 5, are calibrated based on actual vehicle test data obtained from the dynamic responses of multiple test vehicles under various traffic scenarios [
24].
Tc is calibrated from previous research [
15].
4.2.3. DCAV
The ACC model enhances traditional cruise control by autonomously adjusting the vehicle’s speed to maintain a safe following distance from a preceding vehicle. ACC leverages sensor data—typically from radar or lidar—to monitor the speed and position of the vehicle ahead, enabling dynamic speed adjustments without driver intervention. However, traditional ACC models often assume instantaneous perception and reaction, neglecting the inherent delays present in real-world scenarios.
Like the CACC model, the ACC model is also proposed by the California PATH laboratory based on real experiments [
24]. ACC systems can maintain an expected time headway by constantly adjusting speed and acceleration. Moreover, the calibration results of the ACC model have a high degree of match with the actual data. Hence, it can better reflect the actual car-following characteristics of degraded CAVs. Because of this, the ACC model is used to describe the car-following behavior of degraded CAVs.
For degraded CAVs,
a is used to represent their PRT, denoted as PRT_
DCAV. Similar to the CACC model, the improved ACC considering PRT is written as Equations (19) and (20).
where
ka1,
ka2 are the gains on both the positioning and speed errors, respectively, with the calibration results based on the actual vehicle test [
24].
Ta is the desired time-gap of the ACC model and is calibrated from previous research [
25], as shown in
Table 6.
4.3. Lane-Changing Behavior
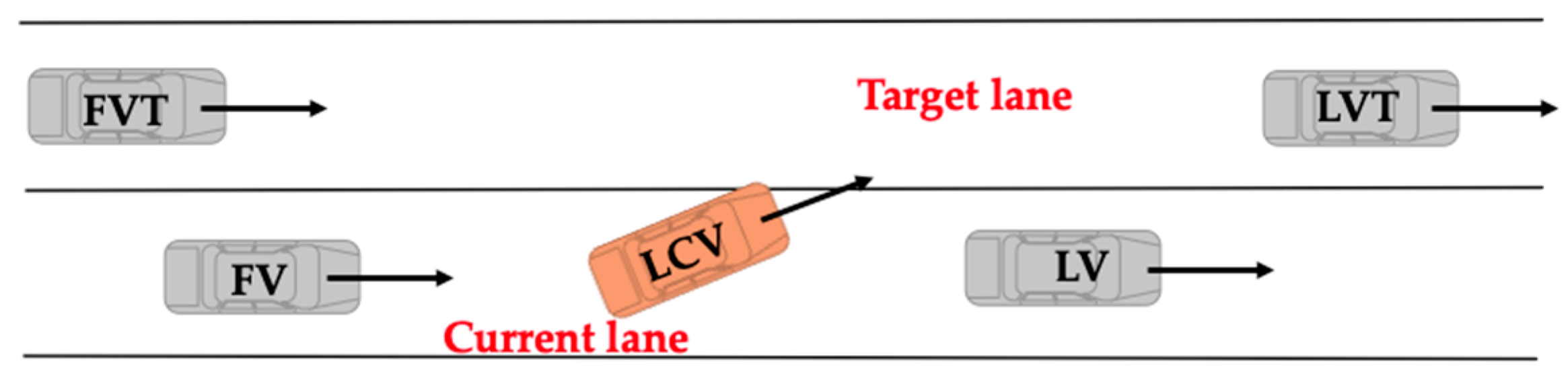
In the lane-changing scenario, five vehicles are involved (
Figure 11): the lane-changing vehicle (LCV), the leading vehicle in the current lane (LV), the following vehicle in the current lane (FV), the leading vehicle in the target lane (LVT), and the following vehicle in the target lane (FVT). The LCV attempts to merge from the current lane into the target lane, influenced by the dynamic interactions with both the LV and FV in the original lane, as well as the LVT and FVT in the target lane. The relative positions, speeds, and accelerations of these vehicles significantly impact the success and safety of the lane-changing maneuver.
In mixed traffic flow, CAVs and HDVs are randomly distributed among the lane-changing vehicles and the target lane. To describe the impact of CAV degradation during lane-changing behavior, the following three typical lane-changing scenarios involving DCAVs have been selected for analysis, as shown in
Figure 12.
4.4. Simulation
We conducted a simulation using a real road segment from the NGSIM traffic dataset. The objective was to evaluate the effectiveness of the total risk metric (
Rtotal). We also assessed the impact of penetration rate, PRT, and lane-changing combinations on mixed traffic flow safety. Real driving data from 7:50 to 8:35 a.m. were used to simulate vehicle flow. This experiment aims to validate the content in
Section 3.
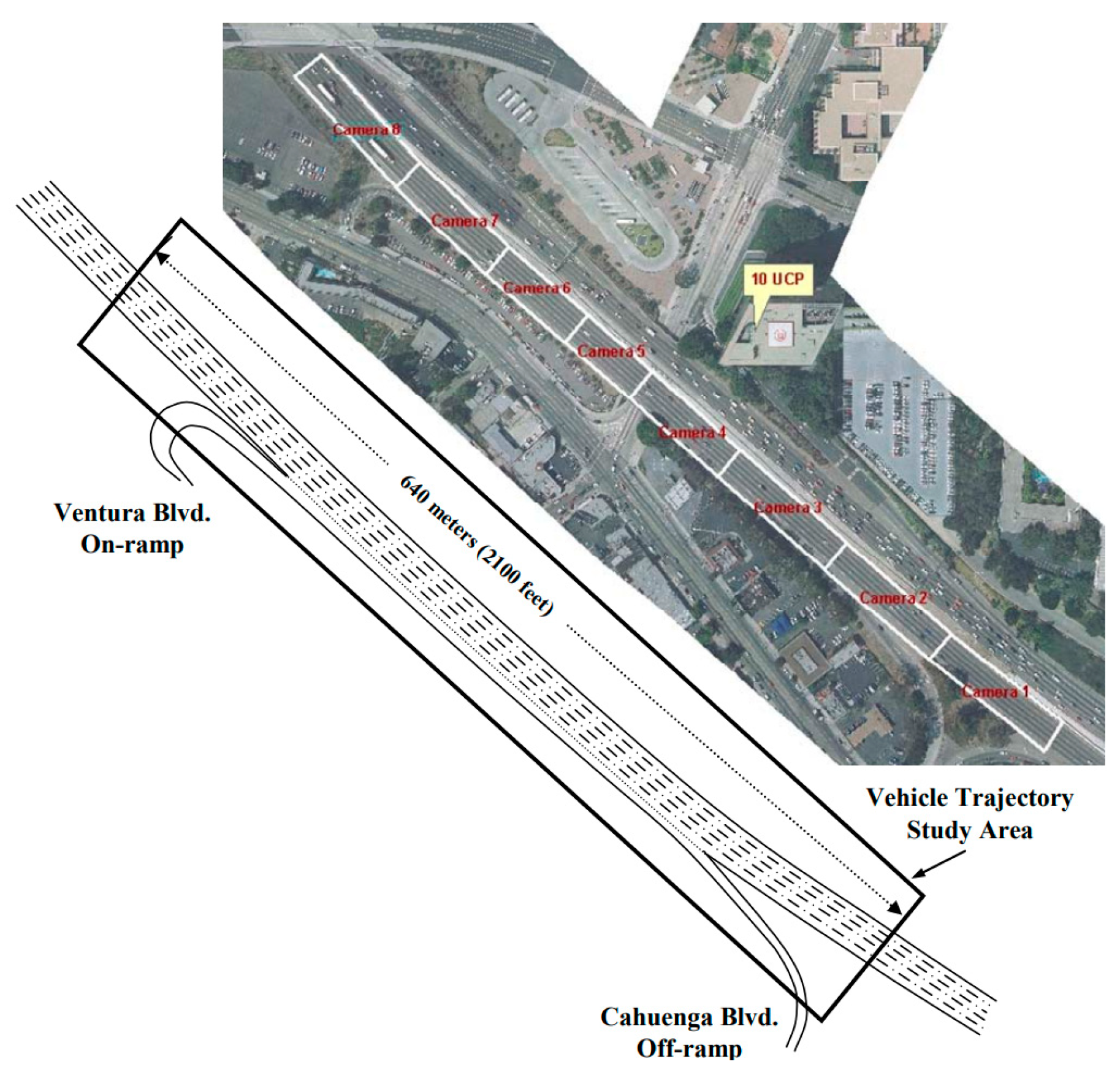
The selected road segment is 640 m long, including entrance and exit ramps, as shown in
Figure 5. The entrance ramp induces deceleration waves at the bottleneck, which propagate upstream and lead to rear-end collisions, as noted in previous studies [
26]. The segment has limited lane-changing opportunities and a wide speed range (0 to 20 m/s), making it ideal for testing longitudinal and lateral safety behaviors. The first 50 m of the simulation serves as a warm-up and is not included in the analysis. The vehicle length
l is 5 m. The car-following model parameters for IDM, CAV, and DCAV are shown in
Table 4,
Table 5, and
Table 6, respectively.
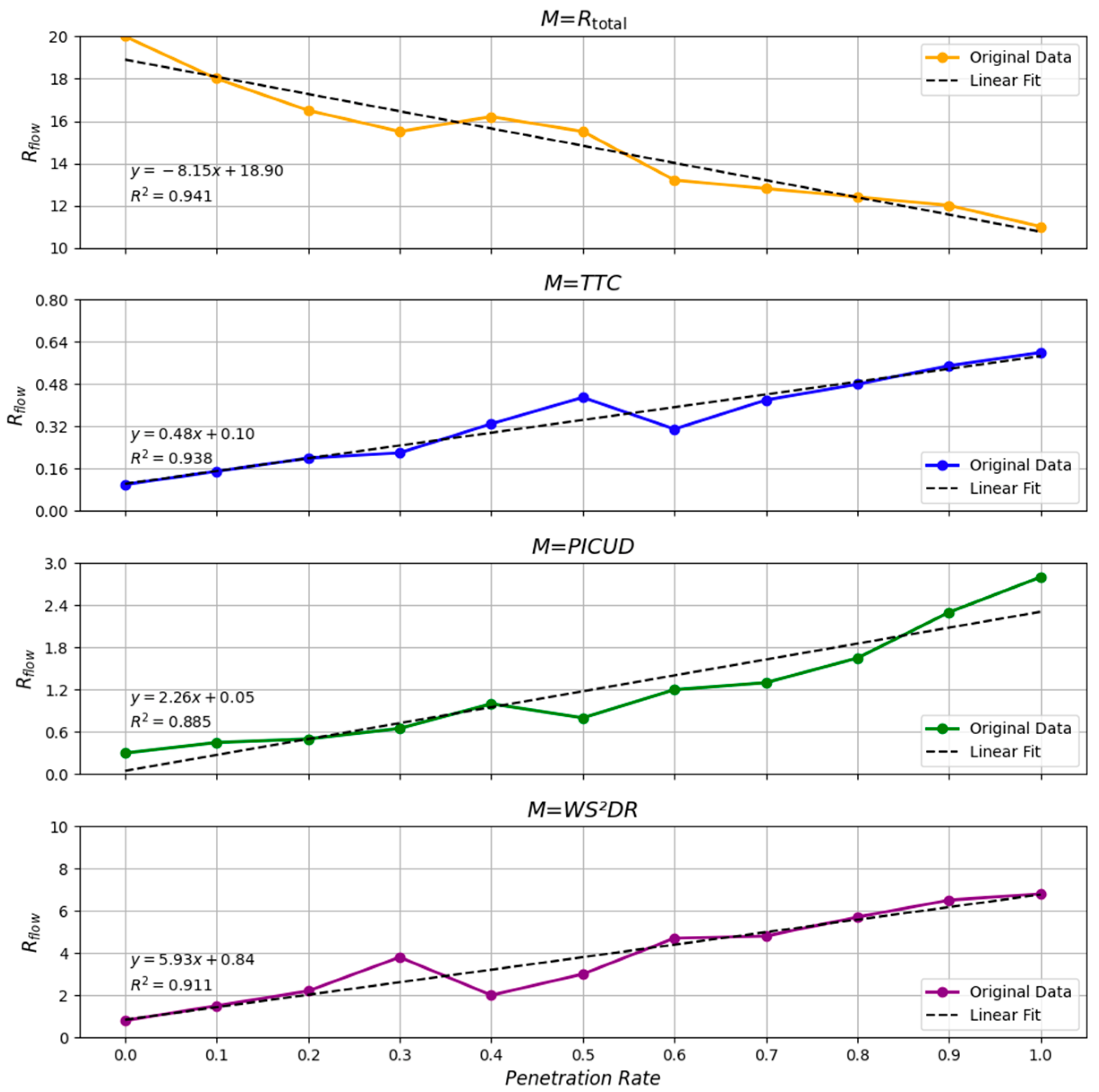
4.4.1. Effects of Penetration Rate of CAVs
A reduction in the penetration rate of CAV increases the probability of degradation phenomena. Additionally, the CAV penetration rate determines the proportion of the three types of vehicles within mixed traffic flows (see
Section 4.1). Therefore, this part will focus on examining the impact of CAV penetration rate on collision risk (
Figure 13).
From
Figure 13, it can be seen that in the specific penetration rate range of 0.4–0.6, all four indicators exhibit fluctuations. Among them,
Rtotal shows relatively sensitive changes. This is mainly because
Rtotal takes into account both vehicle reaction time and CAV degradation, thereby better reflecting the overall traffic flow safety changes. In contrast, WS
2DR shows significant fluctuations at a penetration rate of 0.4, while PICUD experiences a large fluctuation at 0.5. These findings indicate that vehicle behavior changes at these penetration rates have a more pronounced impact on traffic safety. On the other hand, the TTC indicator exhibits significant fluctuations later, at a penetration rate of 0.6. This suggests that TTC lacks responsiveness and fails to capture risk changes at medium to low penetration rates effectively. Compared to the other three typical SSMs, the absolute value of the linear model’s slope for
Rtotal is the largest, indicating its higher sensitivity to changes in penetration rate. Additionally, its
R2 value is the highest, demonstrating that the variation trend of
Rtotal is well-fitted by the linear model, exhibiting high stability and predictability.
This phenomenon suggests that at medium penetration rates (0.4–0.6), the increase in degraded CAVs and the complexity of vehicle interactions elevate safety risks in mixed-traffic environments. As the penetration rate continues to increase (above 0.6), a higher proportion of CAVs can better coordinate the flow, thereby reducing overall risk. Therefore, controlling the penetration rate within an appropriate range can balance the advantages of autonomous driving technology with the risks introduced by degradation, ultimately improving traffic safety.
4.4.2. Effects of PRT
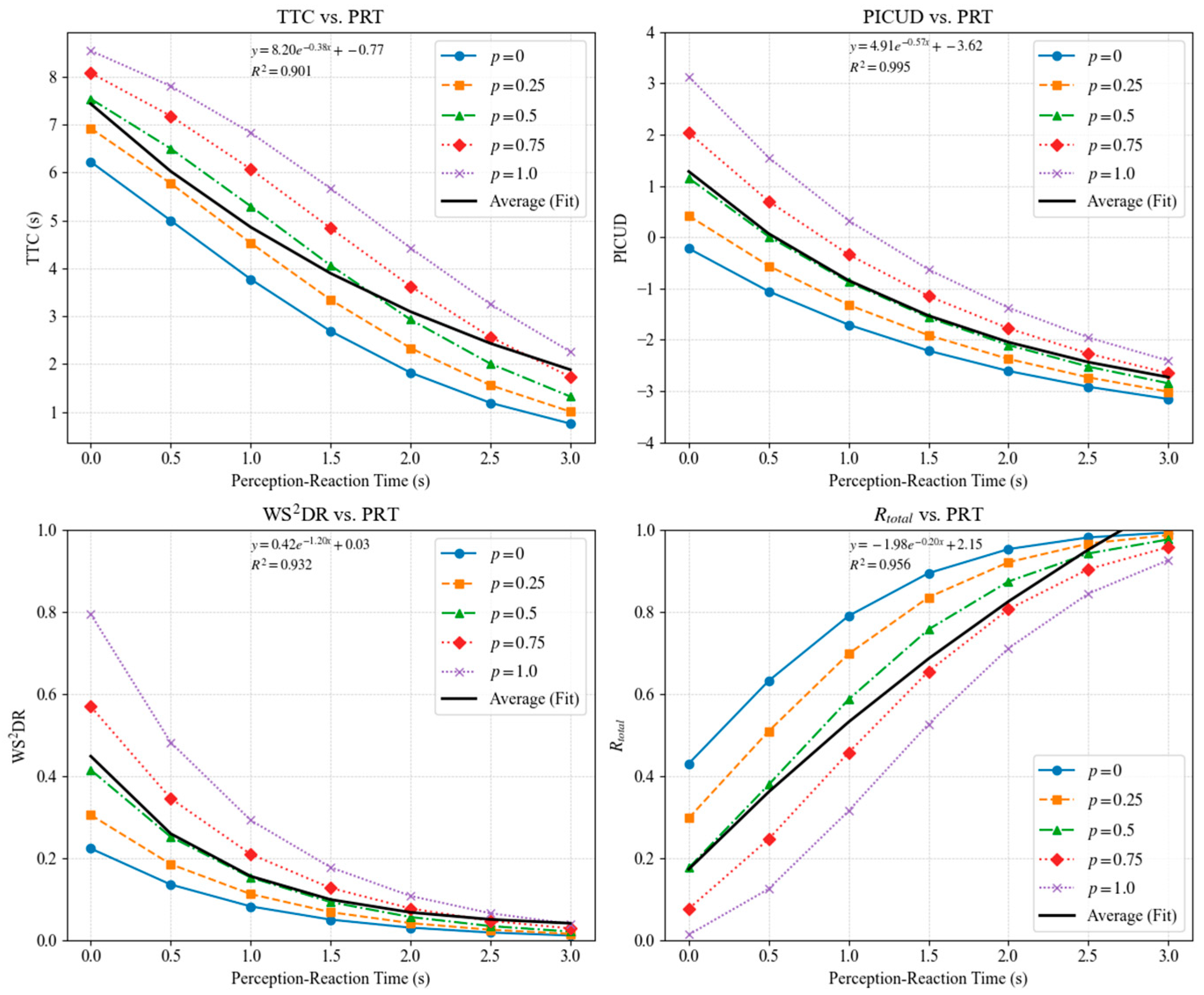
PRT significantly affects safety and risk levels in mixed traffic flows consisting of CAVs, DCAVs, and HDVs. In the following simulation, variations in PRT among different penetrations were taken into account, and the results are presented in
Figure 14.
Figure 14 illustrates the impact of PRT on four different safety metrics, revealing the following findings:
- (1)
When the penetration rate is 0.5, as PRT increases from 0 to 3 s, TTC, PICUD, and WS2DR decrease by more than 77%, while Rtotal increases by over 90%. This indicates that prolonged reaction times significantly elevate vehicle operational risks. At low PRT values (e.g., PRT = 0 s), the four metrics show significant differences between low penetration rates (p = 0 or p = 0.25) and high penetration rates (p = 0.75 or p = 1). However, at higher PRT values (e.g., PRT = 3 s), the gaps between the metric curves narrow, and the differences among the metrics diminish. This suggests that penetration rate has a greater influence when reaction time is short, while its impact decreases as PRT increases;
- (2)
All metrics are notably influenced by the penetration rate. As the CAV penetration rate increases, the sensitivity of metrics to PRT decreases. At higher penetration rates (e.g., p = 0.75 or p = 1), the risk level stabilizes. This demonstrates that the cooperative control capabilities of CAVs effectively mitigate longitudinal and lateral risks caused by increased PRT;
- (3)
The metrics vary in sensitivity and responsiveness to PRT changes. TTC has the steepest slope and the fastest change, making it suitable for short-term collision risk assessment. In contrast, Rtotal changes most gradually, making it more appropriate for assessing long-term comprehensive risks and macro-level trends;
- (4)
The high correlation of the fitted curves (R2 close to 1) confirms the exponential relationship between the metrics and PRT. Rtotal achieves the highest R2 value (0.956), indicating superior explanatory power, applicability, and stability in reflecting the relationship between PRT and risk variations.
4.4.3. Effects of Lane-Changing Modes
To further analyze the impact of different lane-changing modes on traffic safety, we introduced
Figure 15. This figure presents the variations in various safety metrics (TTC, WS
2DR, PICUD, and
Rtotal) under three degradation scenarios:
Mode A: Degradation affects only the LCV.
Mode B: Degradation affects only the FVT.
Mode C: Degradation affects only the FV
In examining the variations of safety indicators across different lane-changing modes in
Figure 15, we observe that Mode B consistently exhibits the lowest values of TTC and WS
2DR, along with a negative PICUD, indicating the highest collision risk among the modes; Mode C, on the other hand, shows the highest TTC and WS
2DR values and a positive PICUD, reflecting the lowest collision risk, while Mode A falls in between.
Rtotal can arrive at the same conclusions as other metrics, demonstrating its ability to adapt to various risk scenarios.
These patterns occur because in Mode B, the degradation of the FVT increases its perception–reaction time and eliminates cooperative communication capabilities, preventing it from promptly detecting and responding to the LCV’s maneuvers, thereby elevating the likelihood of rear-end collisions. In Mode C, although the FV is degraded, the LCV is moving away from it during the lane change, allowing the FV sufficient time and space to react despite its increased reaction time, thus minimizing risk. Mode A presents a moderate risk because while the LCV’s degradation reduces its environmental perception accuracy, it retains control over its actions and can adopt conservative strategies to mitigate hazards; additionally, surrounding vehicles with full CACC functionality can adjust their behavior to compensate for the LCV’s limitations, reducing overall risk. Therefore, the dangerousness of these scenarios is ranked as Mode B > Mode A > Mode C.
By understanding these dynamics, traffic management systems can devise strategies to mitigate risks associated with increased PRTs and lane-changing maneuvers in mixed-traffic environments.
This study’s simulation analysis focuses on a specific road segment, providing valuable insights into mixed traffic safety. However, limitations exist. Simplified assumptions for PRT and lane-changing may not fully represent diverse driving behaviors in complex scenarios, affecting risk accuracy. Computational constraints limit the study to localized simulations, restricting scalability to larger networks. The lack of real-world validation also impacts reliability. Future research will incorporate diverse datasets, refine models, expand simulation scales, and integrate real-world data to enhance robustness and applicability.
5. Conclusions
The proposed risk assessment method effectively integrates car-following and lane-changing behaviors, offering a more precise evaluation of collision risks in mixed traffic flow. Empirical validation demonstrates that the method can effectively identify high-risk scenarios. The study reveals that the degradation effects of CAVs, PRT, and penetration rates have significant impacts on traffic safety, specifically in the following aspects:
- (1)
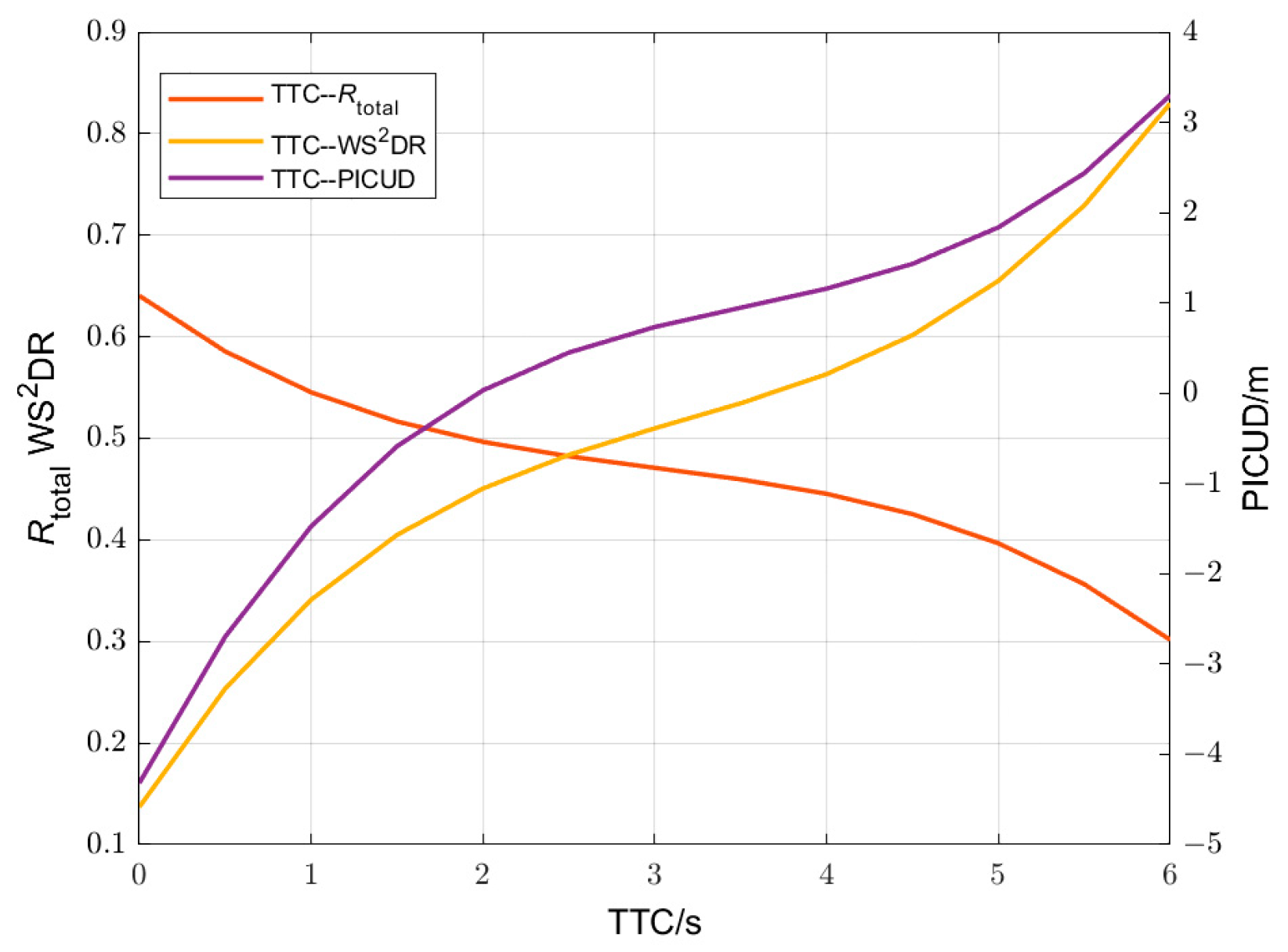
When the TTC is set to 2 s, the collision risk threshold of Rtotal is determined to be 0.49, providing a reliable benchmark for identifying critical situations;
- (2)
Considering CAV degradation, when the penetration rate of CAV is between 0.4 and 0.6, collision risks increase by an average of 15%, highlighting the safety challenges of intermediate CAV adoption rates in mixed traffic flow. Rtotal takes into account multiple factors, such as PRT, and demonstrates relatively sensitive variations, providing a more effective representation of overall changes in traffic flow safety;
- (3)
At lower PRTs, penetration rates have a more significant impact on collision risks, whereas at higher PRTs, the impact decreases, as vehicle coordination is insufficient to mitigate the elevated risks caused by delayed PRTs. Compared to other metrics, Rtotal exhibits superior applicability and stability, making it more suitable for evaluating the long-term comprehensive risks and macro-level trends of traffic flow;
- (4)
In lane-changing scenarios, the degradation of the FVT contributes the most to collision risks, emphasizing the importance of vehicle degradation location and its combinations in overall risk assessment.
This study offers practical recommendations for public traffic management, including the development of real-time risk prediction and warning systems to accurately identify high-risk car-following and lane-changing behaviors. It also suggests enhancements in lane management strategies and dynamic speed control measures, with a focus on addressing safety challenges in mixed traffic flows with intermediate CAV penetration rates. Special emergency response measures should also be established to mitigate risks arising from CAV degradation. Moreover, collaboration with vehicle manufacturers and traffic management agencies is essential to promote the deep integration of CAV technologies with transportation infrastructure, thereby enhancing overall traffic safety.
Future research should explore the real-time implementation of the proposed risk index within intelligent transportation systems and examine its effectiveness under different levels of vehicle automation and connectivity. Additionally, the applicability of this method should be extended to urban roads, intersections, and other complex traffic environments. Incorporating environmental factors, such as weather conditions and road surface quality, could further optimize the predictive capabilities of the model. Furthermore, dynamic risk thresholds and their integration with real-time control algorithms should be investigated to better support traffic safety management across diverse scenarios. These advancements will provide robust technical support for the global optimization and dynamic risk management of intelligent transportation systems.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}