
Characterization of a Mechanical Antenna Based on Rotating Permanent Magnets

 ,
,  , , ,
, , ,
Abstract
1. Introduction
2. Related Works
3. Materials, Methodology and Experimental Setup
3.1. Materials and Structure
3.2. Equations
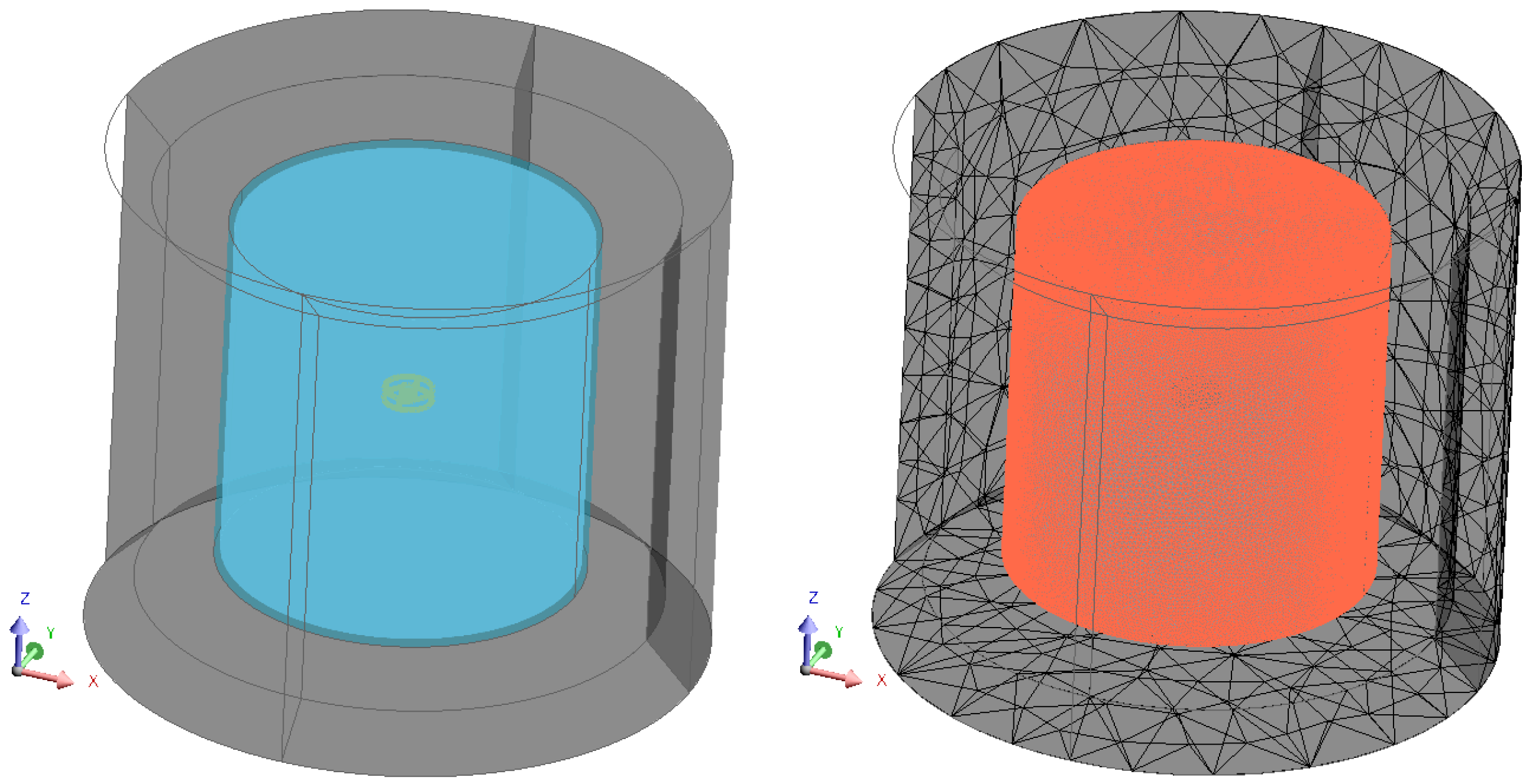
3.3. Numerical Model
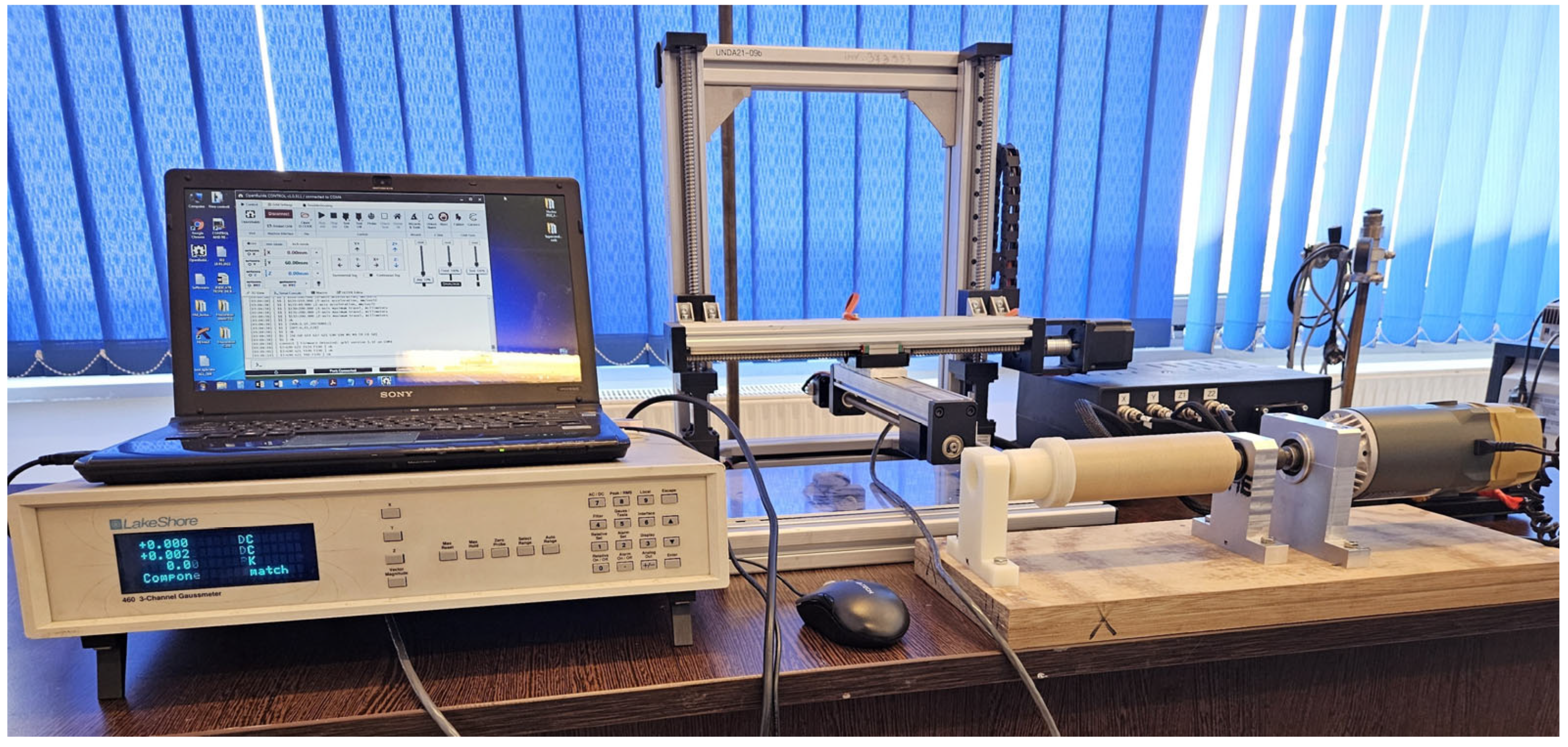
3.4. Measurement Setup and Equipment
4. Results
4.1. Numerical Results
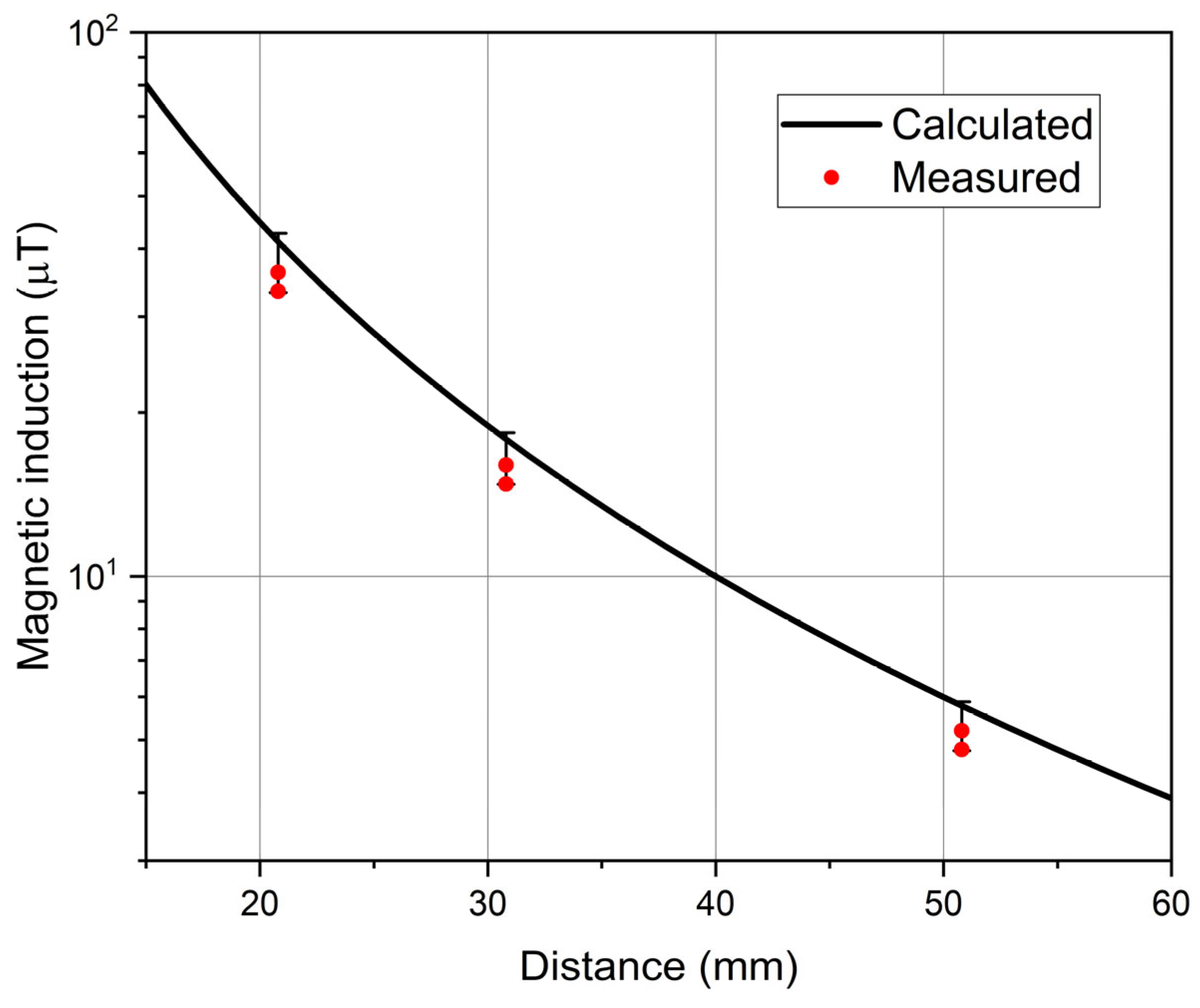
4.2. Experimental Results up to 100 mm
4.2.1. Mechanical Antenna with CRRM
4.2.2. Mechanical Antenna with CABM
4.3. 1/r3 Dependence and the Maximum Receiving Distance of Magnetic Field in a Suburban Environment
4.4. The Equivalence Between the Magnetic Field Emitted by the Rotating Magnet Relative to the Field Produced by Coils/Solenoid
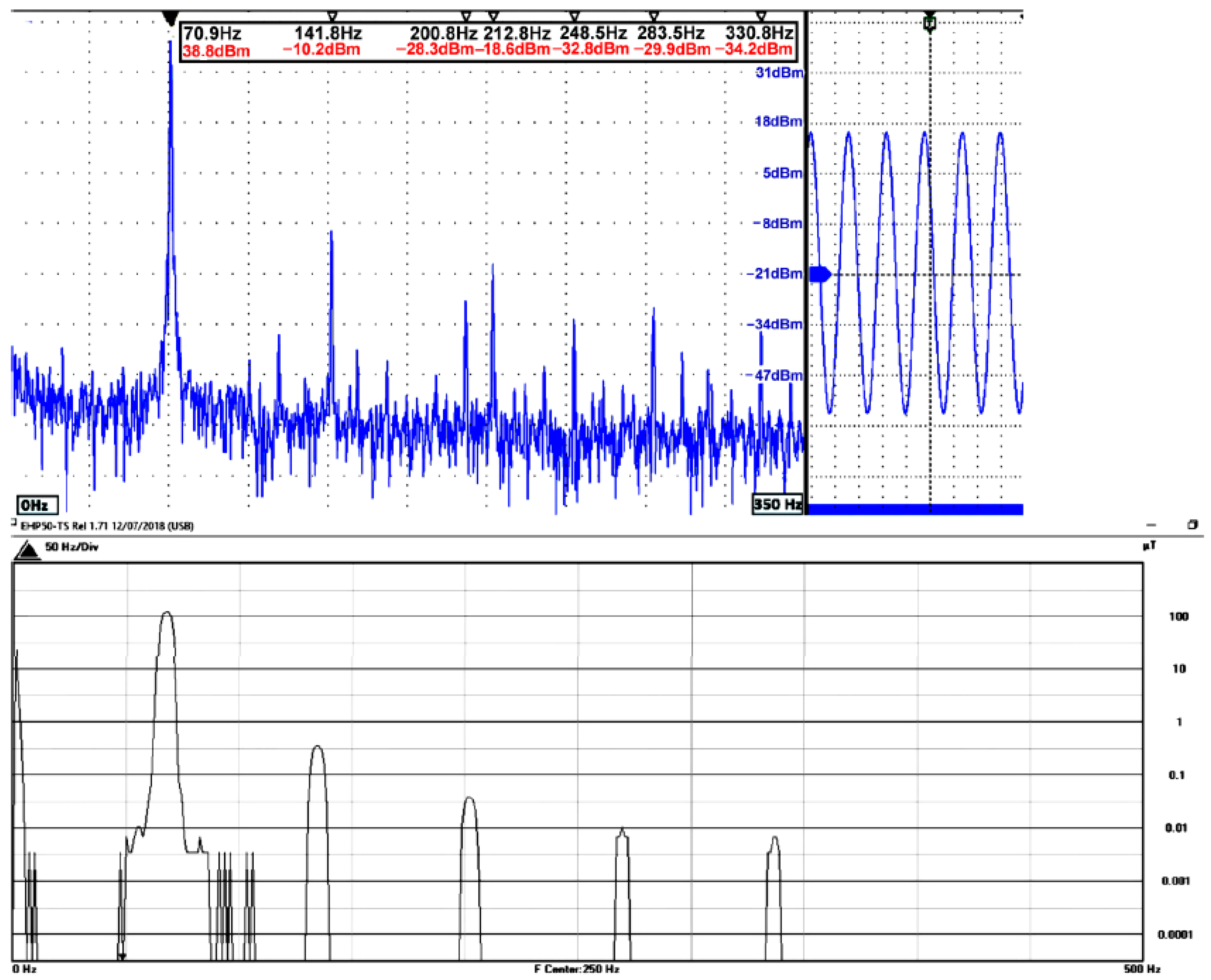
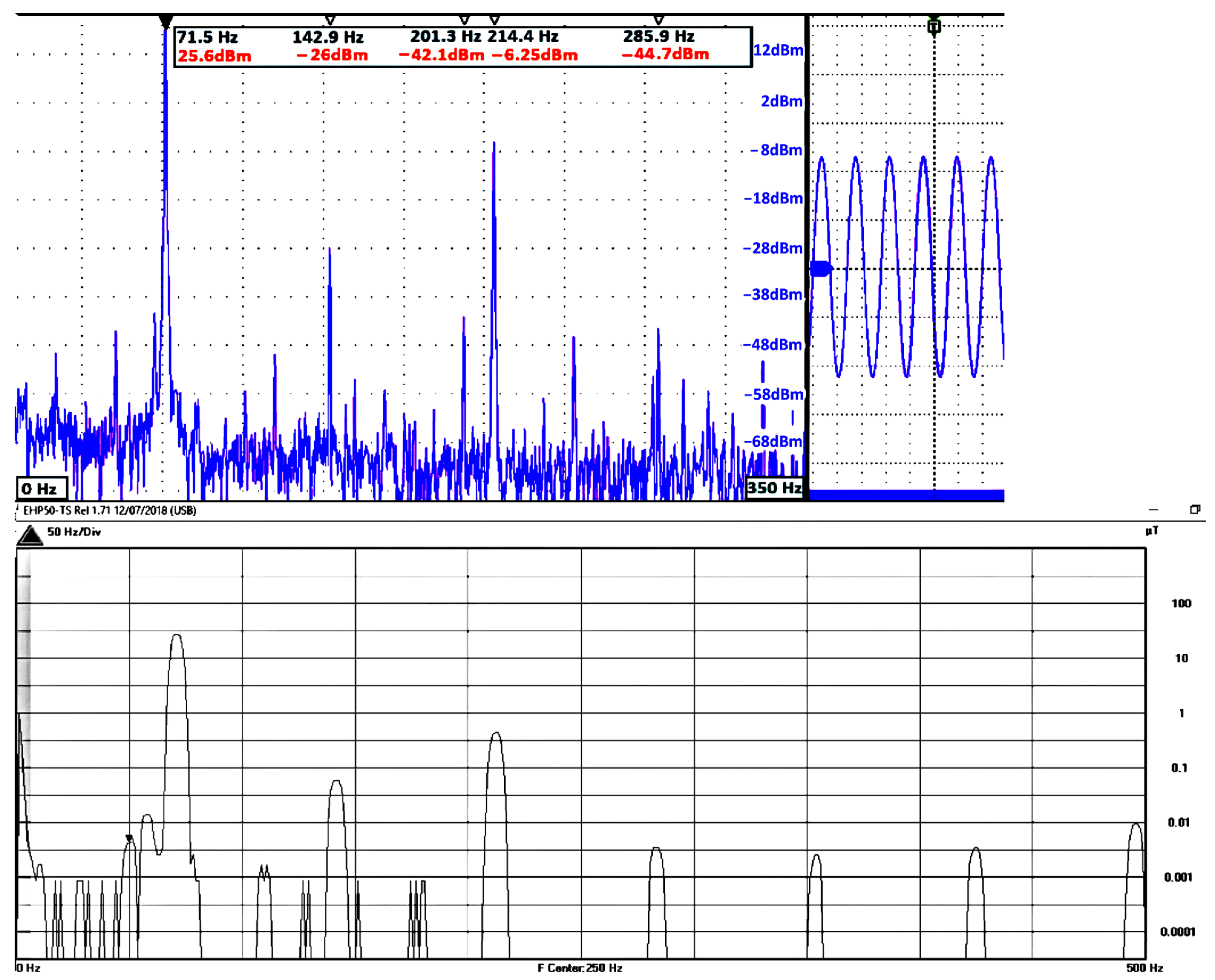
4.5. Harmonics and Interharmonics
5. Discussion and Conclusions
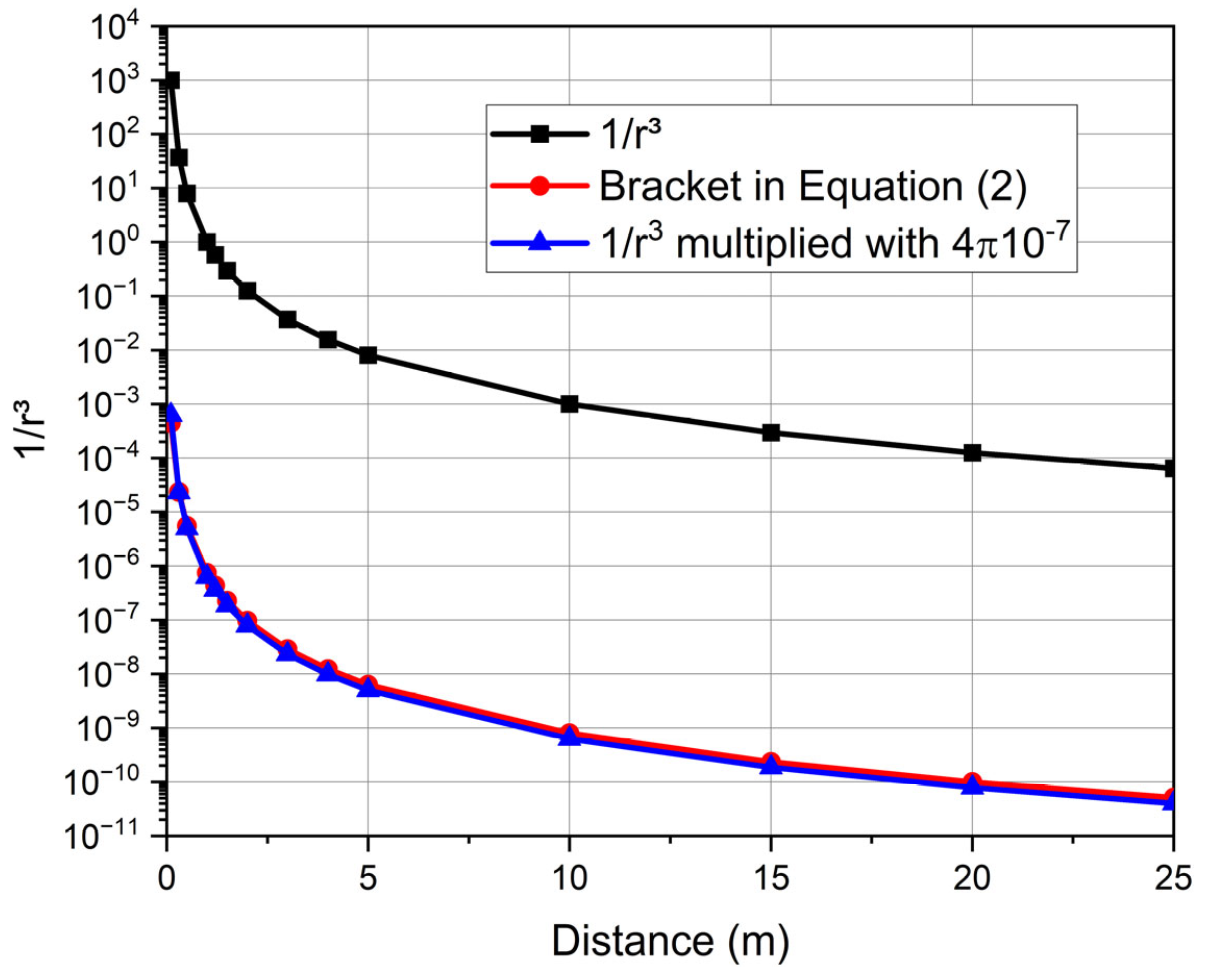
- The equivalence between relations (1) and (2) is a matter that has not been specified so far. Moreover, it is analytically demonstrated that the distance dependence of the magnetic field of these configurations scales as 1/r3. A similar approach, but without theoretical explanations, is attempted in [30].
- Demonstrating the 1/r3 dependence up to a distance of 15–20 m; in the studied bibliography, these distances are much smaller.
- Harmonic analysis via competing test methods (replicate testing), which was not found in the bibliography. This is of great importance in the analysis of the efficiency of these types of antennas.
- Experimental demonstration of the quasi-identity for the magnetic fields emitted as a function of distance in the static and harmonic regimes at the used frequencies. This assertion, together with the demonstration of the 1/r3 dependence, immediately leads to the idea that in order to evaluate the intensity of the harmonic magnetic field radiated at a certain distance, we do not have to rotate the magnet: it is enough to measure the intensity of the static field in the laboratory at short distances.
- The identity between the magnetic field intensities in static and harmonic regimes for the studied configurations;
- Both analytical and experimental demonstration of the 1/r3-distance dependence of the intensity of the emitted magnetic field.
- In the case of a solenoid with dimensions similar to the ones of the CABM, we should apply a current of the order of 4 × (236… 298) A, as follows from Table 5. Obviously these are estimated values, but the order of magnitude is 1000 A;
- In the case of the CRRM, in order to equate the intensity of the magnetic field it generates, we should have a dimensionally comparable structure (coil with five turns and a radius of 22 mm) carrying a current of 1000 A (see Figure 17).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gong, S.; Liu, Y.; Liu, Y. A rotating-magnet based mechanical antenna (RMBMA) for ELF-ULF wireless communication. Prog. Electromagn. Res. M 2018, 72, 125–133. [Google Scholar] [CrossRef]
- Gołkowski, M.; Park, J.; Bittle, J.; Babaiahgari, B.; Rorrer, R.A.; Celinski, Z. Novel Mechanical Magnetic Shutter Antenna for ELF/VLF Radiation. In Proceedings of the 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, MA, USA, 8–13 July 2018. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Gao, S.J.; Li, M.; Wang, Y.Q.; Tu, M.J. Effect of process on the magnetic properties of bonded NdFeB magnet. J. Magn. Magn. Mater. 2006, 299, 195–204. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, F.; Sun, F.; Gong, Z.; Liu, X.; Fang, G. Radiation principle and spatial direct modulation method of a low frequency antenna based on rotating permanent magnet. Chin. J. Electron. 2022, 31, 674–682. [Google Scholar] [CrossRef]
- Dong, Y.; Wu, J.; Zhang, X.; Xie, T. A novel dual-permanent-magnet mechanical antenna for pipeline robot localization and communication. Sensors 2023, 23, 3228. [Google Scholar] [CrossRef]
- Prasad, S.; Tok, R.U.; Fereidoony, F.; Wang, Y.E.; Zhu, R.; Propst, A.; Bland, S. Magnetic Pendulum Arrays for Efficient ULF Transmission. Sci. Rep. 2019, 9, 13220. [Google Scholar] [CrossRef]
- Yi, Q.; Li, N.; Zhang, J.; Sun, Z. A Rotating-Magnet Based Mechanical Antenna for VLF Communication. In Proceedings of the Seventh Asia International Symposium on Mechatronics, Hangzhou, China, 19–22 September 2019; Volume II, pp. 69–77, Part of LNEE 589. [Google Scholar] [CrossRef]
- Bao, J.; Tian, Y.; Wang, Y.; Yi, Q.; Li, N. Research on mechanical antenna performance based on rotating permanent magnet triangle array. J. Phys. Conf. Ser. 2021, 1971, 012005. [Google Scholar] [CrossRef]
- Guo, M.; Wen, X.; Yang, S.; Xu, J.; Pan, X.; Bi, K. Extremely-low frequency mechanical antenna based on vibrating permanent magnet. Eng. Sci. 2021, 16, 387–392. [Google Scholar] [CrossRef]
- Thanalakshme, R.P.; Kanj, A.; Kim, J.; Wilken-Resman, E.; Jing, J.; Grinberg, I.H.; Bernhard, J.T.; Tawfick, S.; Bahl, G. Magneto-mechanical transmitters for ultra-Low frequency near-field communication. arXiv 2021. [Google Scholar] [CrossRef]
- Thanalakshme, R.P.; Kanj, A.; Kim, J.; Wilken-Resman, E.; Jing, J.; Grinberg, I.H.; Bernhard, J.T.; Tawfick, S.; Bahl, G. Magneto-mechanical transmitters for ultra-low frequency near-field data transfer. IEEE Trans. Antennas Propag. 2022, 70, 3710–3722. [Google Scholar] [CrossRef]
- Zhang, W.; Cao, Z.; Wang, X.; Quan, X.; Sun, M. Design, array, and test of super-low-frequency mechanical antenna based on permanent magnet. IEEE Trans. Antennas Propag. 2023, 71, 2321–2329. [Google Scholar] [CrossRef]
- Wu, H.; Jiang, T.; Liu, Z.; Fu, S.; Cheng, J.; You, H.; Jiao, J.; Bichurin, M.; Sokolov, O.; Ivanov, S.; et al. Magneto-mechano-electric antenna for portable VLF transmission. Adv. Electron. Mater. 2023, 9, 2300096. [Google Scholar] [CrossRef]
- Niu, Y.; Ren, H. Transceiving signals by mechanical resonance: A low frequency (LF) magnetoelectric mechanical antenna pair with integrated DC magnetic bias. arXiv 2021. [Google Scholar] [CrossRef]
- Fawole, O.C.; Tabib-Azar, M. An electromechanically modulated permanent magnet antenna for wireless communication in harsh electromagnetic environments. IEEE Trans. Antennas Propag. 2017, 65, 6927–6936. [Google Scholar] [CrossRef]
- Burch, H.C.; Garraud, A.; Mitchell, M.F.; Moore, R.C.; Arnold, D.P. Experimental generation of ELF radio signals using a rotating magnet. IEEE Trans. Antennas Propag. 2018, 66, 6265–6272. [Google Scholar] [CrossRef]
- Strachen, N.; Booske, J.; Behdad, N. A mechanically based magneto-inductive transmitter with electrically modulated reluctance. PLoS ONE 2018, 13, e0199934. [Google Scholar] [CrossRef] [PubMed]
- Hosseini-Fahraji, A.; Manteghi, M.; Ngo, K.D.T. New way of generating electromagnetic waves. IEEE Trans. Antennas Propag. 2021, 69, 6383–6390. [Google Scholar] [CrossRef]
- Toujun, Z.; Bao, W.; Xu, Z.; Zhao, M.; Huang, X.; Wei, W.; Liu, R.; Xie, G. Optimizing microstructure, magnetic properties and mechanical properties of sintered NdFeB magnet by double alloy method and grain boundary diffusion. Intermetallics 2023, 162, 108027. [Google Scholar] [CrossRef]
- Brown, D.N. Fabrication, Processing Technologies, and New Advances for RE-Fe-B Magnets. IEEE Trans. Magn. 2016, 52, 2101209. [Google Scholar] [CrossRef]
- Hioki, K. High performance hot-deformed Nd-Fe-B magnets (Review). Sci. Technol. Adv. Mater. 2021, 22, 72–84. [Google Scholar] [CrossRef]
- NdFeB Magnets, Quadrant. Available online: https://www.quadrant.us/resources/Data-Sheet/1740.html (accessed on 25 September 2024).
- Physics Forum. Available online: https://www.physicsforums.com/threads/formula-of-solenoid-magnetic-b-field-at-ending-middle-and-outside.828426/ (accessed on 22 October 2024).
- Camacho, J.M.; Sosa, V. Alternative method to calculate the magnetic field of permanent magnets with azimuthal symmetry. Rev. Mex. Fis. E 2013, 59, 8–17. Available online: http://www.redalyc.org/articulo.oa?id=57048158002 (accessed on 12 August 2024).
- Kaufman, A.; Itskovich, G. Quasistationary Field of Magnetic Dipole in a Uniform Medium. In Basic Principles of Induction Logging–Electromagnetic Methods in Borehole Geophysics; Kaufman, A., Itskovich, G., Eds.; Elsevier: Amsterdam, The Netherlands, 2017; pp. 163–172. [Google Scholar] [CrossRef]
- Bădic, M.; Pîslaru-Dănescu, L.; Ștefan, M. Bazele Ecranarii Electromagnetice (Fundamentals of Electromagnetic Shielding); Electra Publishing House: Bucharest, Romania, 2007; Volume 1, pp. 33–34. ISBN 978-973-7728-93-7. [Google Scholar]
- NYU Physics Department. Available online: https://physics.nyu.edu/~physlab/GenPhysI_PhysII/Intro_experimental_physicsII_write_ups/Magnetic-field-circular-coil_01_30_2017.pdf (accessed on 4 October 2024).
- Nguyen, V.T.; Lu, T.-F. Analytical Expression of the Magnetic Field Created by a Permanent Magnet with Diametrical Magnetization. Prog. Electromagn. Res. C 2018, 87, 163–174. [Google Scholar] [CrossRef]
- Ravaud, R.; Lemarquand, G.; Lemarquand, V.; Depollier, C.L. Analytical Calculation of the Magnetic Field Created by Permanent-Magnet Rings. IEEE Trans. Magn. 2008, 44, 1982–1989. [Google Scholar] [CrossRef]
- Sun, F.; Zhang, F.; Ma, X.; Gong, Z.; Ji, Y.; Fang, G. Research on Ultra-Low-Frequency Communication Based on the Rotating Shutter Antenna. Electronics 2022, 11, 596. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design | Magnetic Field | Frequency | Theory | Applications | Reference |
|---|---|---|---|---|---|
| One rotating permanent magnet made from NdFeB, rectangular | 1.67 nT @ 0.5 m | 30 Hz | Amperian current model | Underwater, underground communications | [1] |
| 0.25 nT @ 1 m | |||||
| Rotating shutter, four fixed rectangular NdFeB permanent magnets | 1.2 nT @ 1 m | 960 Hz | - | Broadband radiation | [2] |
| 18 pT @ 5 m | |||||
| Rotating shutter, eight fixed rectangular NdFeB permanent magnets | 3.1 nT @ 1 m | 960 Hz | - | Broadband radiation | [2] |
| 44 pT @ 5 m | |||||
| One rotating NdFeB permanent magnet, cylindrical | 1.5 µT @ 2 m | 35.6 Hz | Magnetic dipole | Low-frequency magnetic communications in lossy environments | [4] |
| 17 nT @ 8.4 m | |||||
| Two rotating NdFeB permanent magnets, ring-shaped, radially magnetized | 0.95 µT @ 1 m | 30 Hz | Magnetic dipole | Communication through conductive media, such as in pipelines, underwater, and underground | [5] |
| 2.35 nT @10 m | |||||
| Magnetic Pendulum Array (MPA) made of 28 NdFeB cylindrical permanent magnets, diametrically magnetized | 0.5 nT @ 10 m | 1031 Hz | Oscillating magnetic dipole | Efficient generation of ULF radiation | [6] |
| 0.03 nT @ 30 m | |||||
| One rotating NdFeB permanent magnet, cuboidal, with a volume of 6 mm3 (simulation) | 2 pT @ 1 m | <1000 Hz | Second derivative of magnetic dipole moment versus time | Communications | [7] |
| 1.4 pT @ 3.5 m | |||||
| One triangular array of NdFeB permanent magnets | 11.8 V @ 0.15 m | 15 Hz | Rotating magnetic dipole | Underground and underwater communications | [8] |
| 0.85 V @ 0.5 m | |||||
| One rotating NdFeB permanent magnet, rectangular | 0.114 mV @ 1 m | 5 Hz | Magnetic dipole | Wireless transmission systems | [9] |
| 0.112 mV @ 1 m | 15 Hz | ||||
| One vibrating NdFeB permanent magnet, rectangular | 0.179 mV @ 1 m | 5.8 Hz | Magnetic dipole | Wireless transmission systems | [9] |
| 0.179 mV @ 1 m | 6.4 Hz | ||||
| Resonant magneto-mechanical transmitter (MMT) with one rotor and two stators of NdFeB magnets with square cross section | 1 fT @ 1 km (1/r3 extrapolation) | 166 Hz | Point dipole with moment Mr | Low data rate communications in conductive or radio-obstructed environments | [10,11] |
| Resonant magneto-mechanical transmitter (MMT) with 2 × 6 rotors of cylindrical NdFeB magnets and two stators of NdFeB magnets with a square cross section | 0.34 fT @ 1 km (1/r3 extrapolation) | 900 Hz | Point dipole with moment Mr | Low data rate communications in conductive or radio-obstructed environments | [10,11] |
| Mechanical antenna array with rotating NdFeB cylindrical magnets, axially magnetized | 31.6 nT @ 10 m | 75 Hz | Ampere molecular circulation hypothesis | Ultralong-wave communication through the air–seawater interface | [12] |
| 0.05 nT @ 80 m | |||||
| Magnetoelectric (ME) mechanical antenna based on a PZT/Metglas fixed structure; one cylindrical NdFeB permanent magnet attached at its free end | ~0.01 nT @ 5 m | 11.32 kHz | Current loop (for comparison with the ME antenna) | Wireless signal transmission | [13] |
| Magnetostrictive Terfenol-D and piezoelectric PZT laminate with 4 Rb magnets for DC polarization | 2.8 µT @ 5 cm | 37.95 kHz | Piezoelectromagnetic effect | Portable electronics and IoT applications | [14] |
| 13 nT @ 30 cm | |||||
| One rotating NdFeB permanent magnet, cylindrical, diametrically polarized, suspended between two high-permeability laminated pole pieces | 0.6 µT @ 1 m | 22 Hz | Basic coil | Communication systems | [15] |
| One rotating NdFeB permanent magnet, ring-shaped, diametrically magnetized | 800 pT @ 10 m | 500 Hz | - | Data communication and/or position/navigation/timing in lossy environments | [16] |
| 800 fT @ 100 m | |||||
| Transmitter with electrically modulated reluctance (EMR) having one rotating spherical NdFeB permanent magnet and a mumetal shield with a toroidal coil around it | 17.8 µT @ 0.3 m | 200 Hz | Current loop, magnetic dipole | Magneto-inductive communication systems | [17] |
| 1 µT @ 0.74 m | |||||
| Transmitter with electrically modulated reluctance (EMR) having one NdFeB rectangular permanent magnet, seven layers of Metglas sheets, and a coil | 0.17 µT @ 1.2 m | 430 Hz | Electric field generated by a current distribution | Various VLF and ULF applications | [18] |
| LakeShore Hall Probe Model MMZ-2508-UH (Lake Shore Cryotronics, Inc., Westerville, OH, USA) | LakeShore 460 Gaussmeter (Lake Shore Cryotronics, Inc., Westerville, OH, USA) | Multi Axis Positioning System |
|---|---|---|
| Frequency range: DC and 10 Hz, to 400 Hz | Frequency range: DC and 10 Hz, to 400 Hz | Three axis of coordinated motion |
| Operating temperature: 10 °C to 40 °C | DC accuracy: ±0.10% of reading ±0.005% of range | Resolution: 0.1 mm |
| Accuracy (% of reading at 25 °C): 0.25% from 0 to 20 kG; 0.5% from 20 kG to 30 kG; | DC temperature coefficient: ±0.05% of reading ±0.003% of range per °C | USB computer interface |
| Temperature coefficient: ±0.09 G/°C | AC RMS accuracy: ±2% of reading (50 to 60 Hz); | |
| AC peak accuracy: ±5% typical |
| Narda EHP-50F | Magnetic Sensor Coil |
|---|---|
| Frequency range: 1 Hz–400 kHz | 38,000 turns; |
| Measurement domain (B): 0.3 nT–10 mT | Resistance (R): 7.2 kΩ |
| Dynamic range: >105 dB | Inductance (L) = 236.8 H @ 1.6 Hz |
| Dimensions: 92 mm × 92 mm × 109 mm | Medium diameter: 160 mm |
| Software: EHP50-TS | Made in house |
| Distance [m] | Voltmeter [mV] | Narda Sensor [µT] | Ratio mV/µT | 1/r3 [mV] | 1/r3 [µT] |
|---|---|---|---|---|---|
| 1 | 320 | 1.2385 | 258.38 | 320 | 1.2385 |
| 2 | 40 | 0.1478 | 270.64 | 40 | 0.154813 |
| 3 | 12 | 0.0449 | 267.26 | 11.85 | 0.04587 |
| 4 | 5.2 | 0.0203 | 256.16 | 5 | 0.019352 |
| 5 | 2.4 | 0.0089 | 269.66 | 2.56 | 0.009908 |
| 10 | 0.32 | 0.0012 | 266.67 | 0.32 | 0.001239 |
| 15 | 0.08 | 0.095 | 0.000367 | ||
| 20 | 0.02 | 0.04 | 0.000155 | ||
| 25 | 0.005 | 0.02 | 7.93 × 10−5 |
| 20 mm | 30 mm | 50 mm | 100 mm | ||||
|---|---|---|---|---|---|---|---|
| Solenoid (theoretical value) | 41.22 µT | 17.86 µT | 5.99 µT | 1.11 µT | |||
| Magnet (measured value) | 9900 µT | 9900 µT | 4230 µT | 4230 µT | 1460 µT | 1460 µT | 270 µT |
| Solenoid (measured value) | 34 µT | 37.3 µT | 14.8 µT | 16 µT | 4.9 µT | 5.1 µT | |
| Ratio: Magnet (measured)– Solenoid (theoretical) | 240.17 | 236.84 | 243.74 | 243.24 | |||
| Ratio: Magnet (measured)– Solenoid (measured) | 291.18 | 265.42 | 285.81 | 264.38 | 297.96 | 286.27 | |
| Magnet Type | Units | Fundamental | 2nd Harmonic | 3rd Harmonic | 4th Harmonic |
|---|---|---|---|---|---|
| CRRM | Hz | 70.9 | 141.8 | 212.8 | 283.5 |
| dBm | 38.8 | −10.2 | −18.6 | −29.9 | |
| CABM | Hz | 71.5 | 142.9 | 214.4 | 285.9 |
| dBm | 25.6 | −26 | −6.25 | −44.7 | |
| Harmonics weight relative to fundamental frequency | |||||
| CRRM | 49 dBm | 57.4 dBm | 68.7 dBm | ||
| 1/282 | 1/741 | 1/2690 | |||
| CABM | 51.6 dBm | 31.85 dBm | 70.3 dBm | ||
| 1/380 | 1/39 | 1/3162 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morari, C.; Bădic, M.; Dumitru, C.; Pătroi, E.-A.; Dumitru, G.; Ilie, C.I.; Tănase, N. Characterization of a Mechanical Antenna Based on Rotating Permanent Magnets. Appl. Sci. 2024, 14, 11163. https://doi.org/10.3390/app142311163
Morari C, Bădic M, Dumitru C, Pătroi E-A, Dumitru G, Ilie CI, Tănase N. Characterization of a Mechanical Antenna Based on Rotating Permanent Magnets. Applied Sciences. 2024; 14(23):11163. https://doi.org/10.3390/app142311163
Chicago/Turabian StyleMorari, Cristian, Mihai Bădic, Constantin Dumitru, Eros-Alexandru Pătroi, George Dumitru, Cristinel Ioan Ilie, and Nicolae Tănase. 2024. "Characterization of a Mechanical Antenna Based on Rotating Permanent Magnets" Applied Sciences 14, no. 23: 11163. https://doi.org/10.3390/app142311163
APA StyleMorari, C., Bădic, M., Dumitru, C., Pătroi, E.-A., Dumitru, G., Ilie, C. I., & Tănase, N. (2024). Characterization of a Mechanical Antenna Based on Rotating Permanent Magnets. Applied Sciences, 14(23), 11163. https://doi.org/10.3390/app142311163