
Design and Signal-Decoding Test Verification of Dual-Channel Round Inductosyn Decoding Circuit


Abstract
1. Introduction
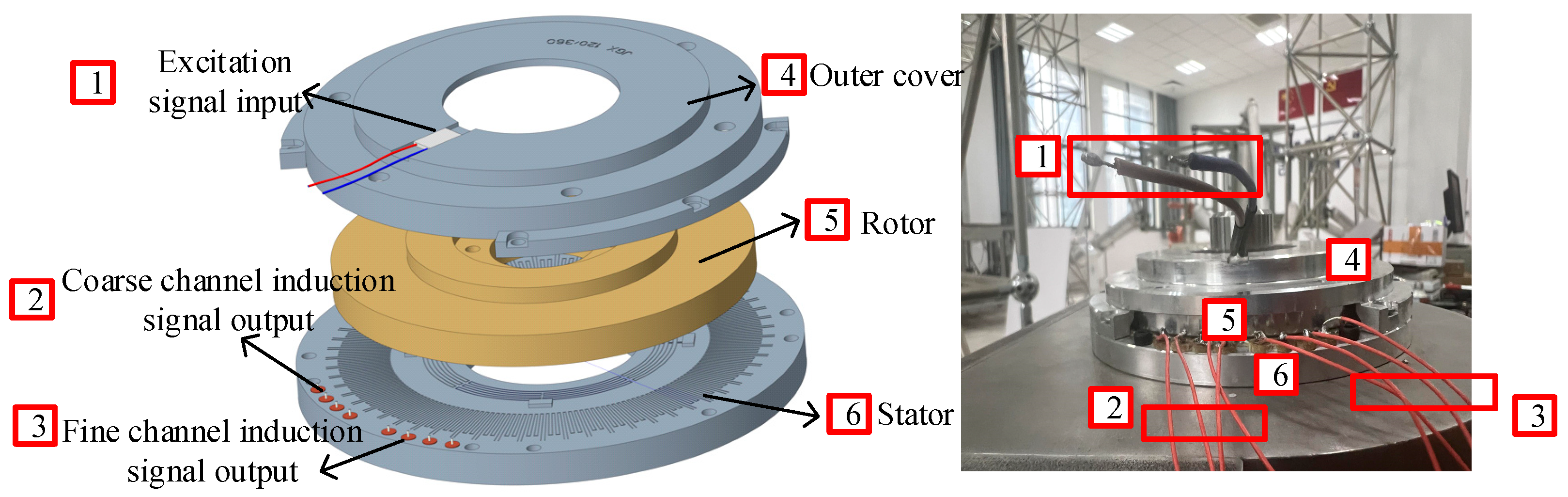
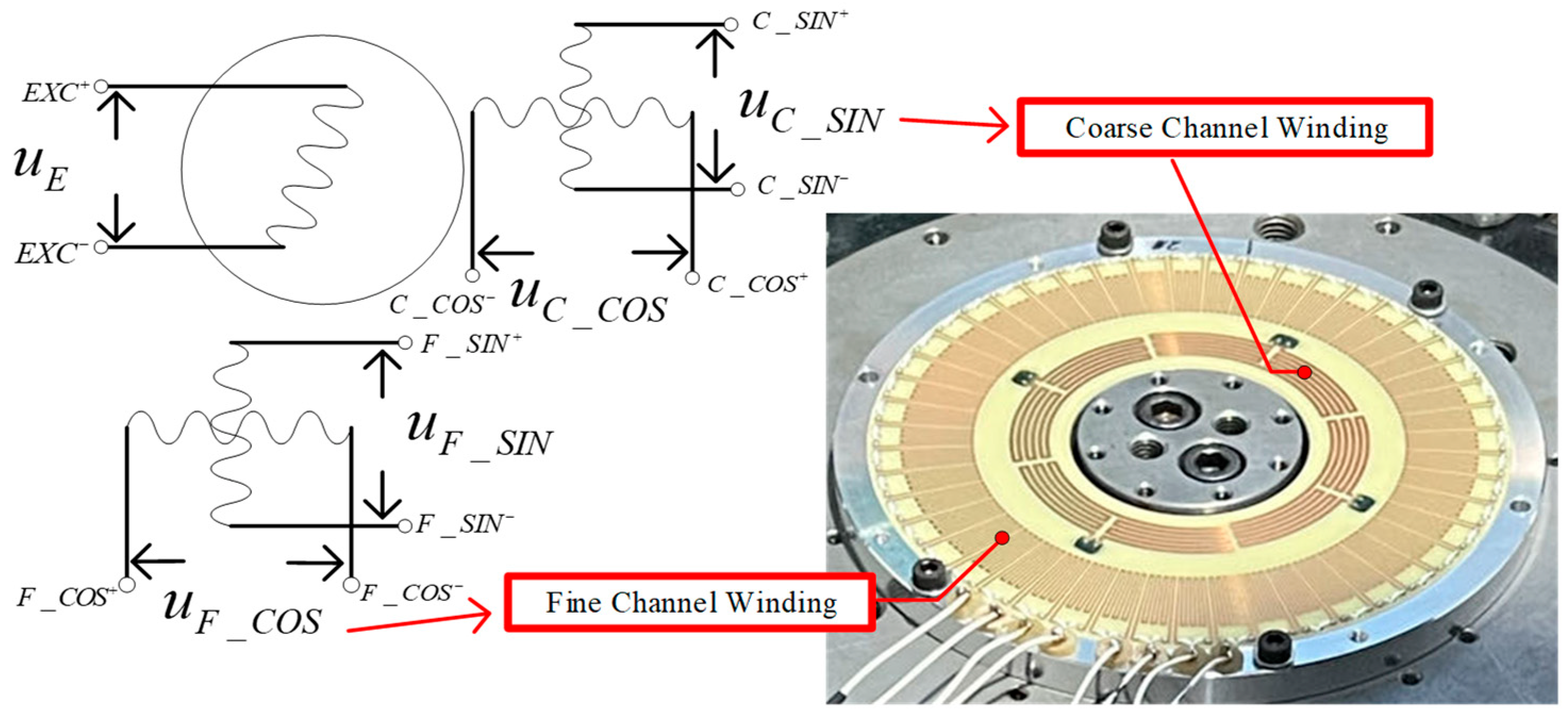
2. Principle of the Dual-Channel Round Inductosyn
3. Decoding-Circuit Hardware Design
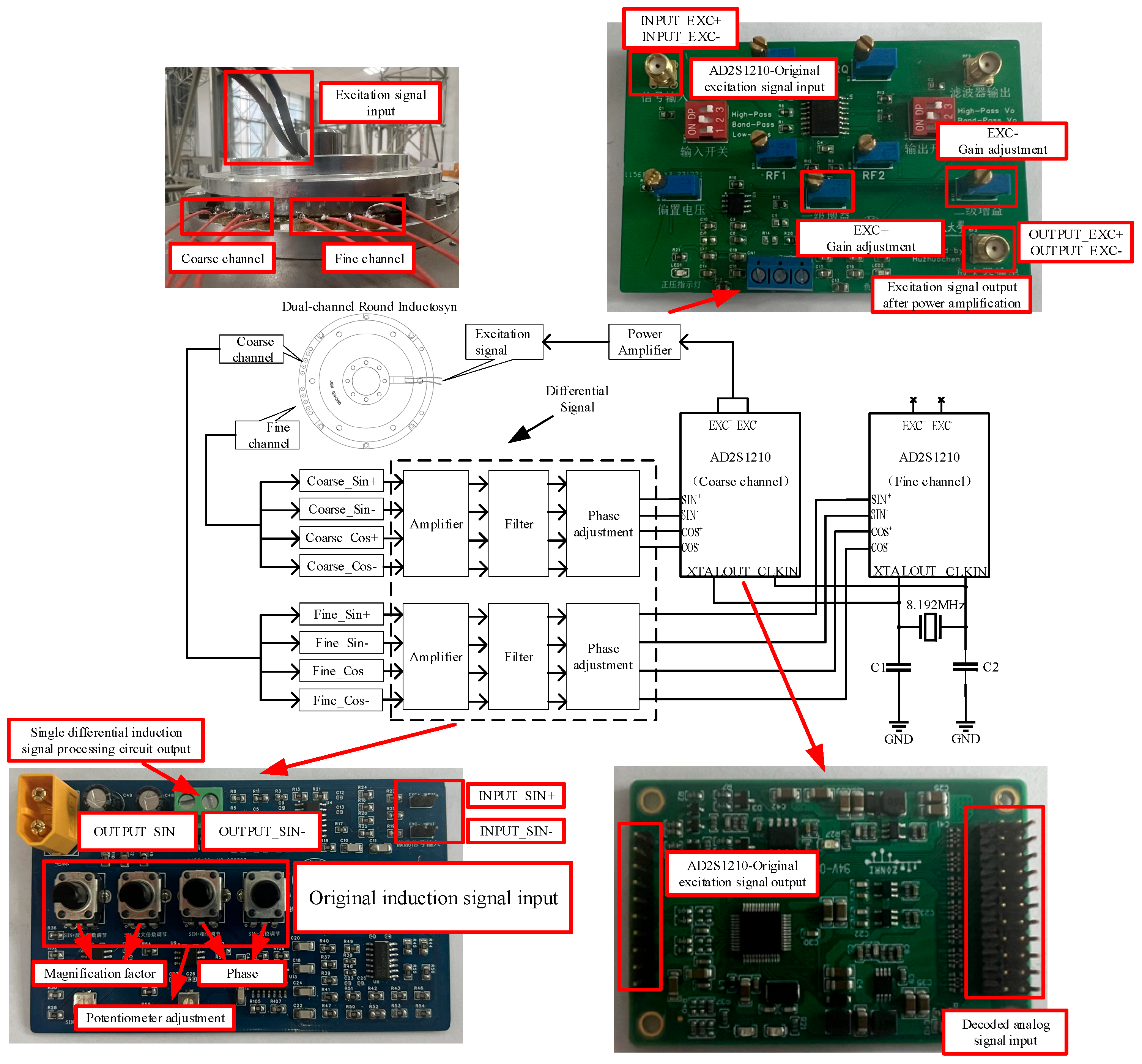
3.1. Hardware Architecture of Decoding Circuit
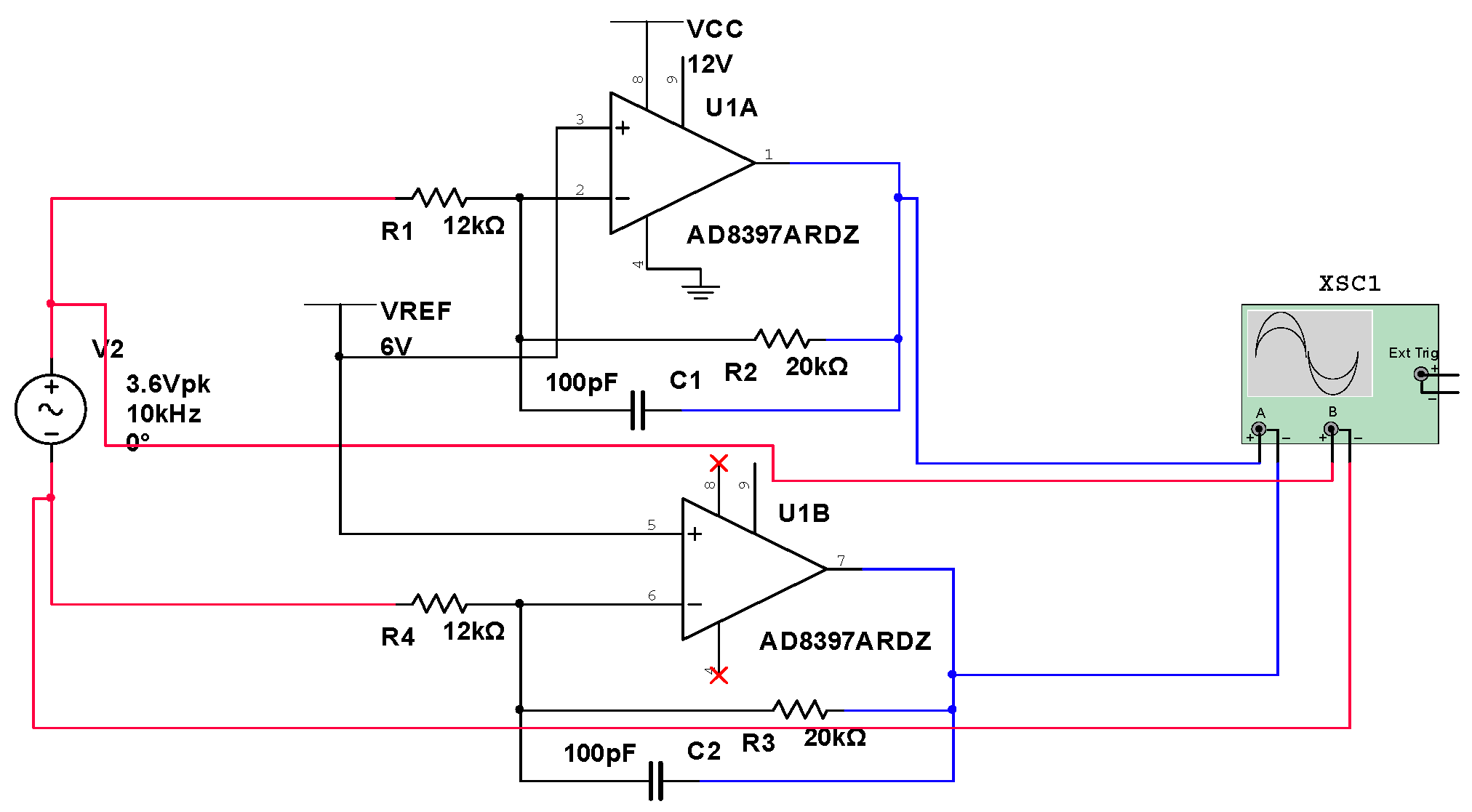
3.2. Design of Power Amplification Circuit for Excitation Signal
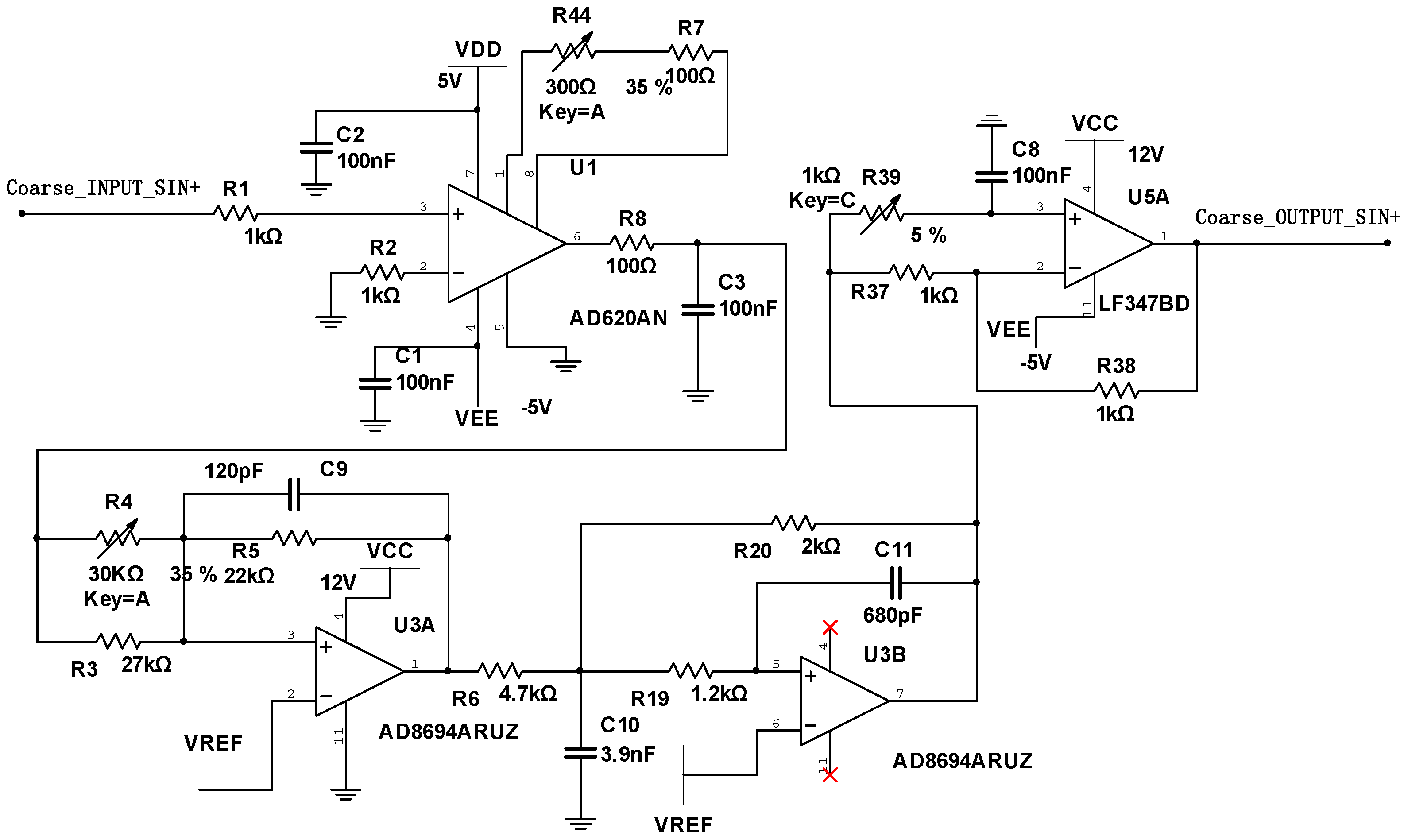
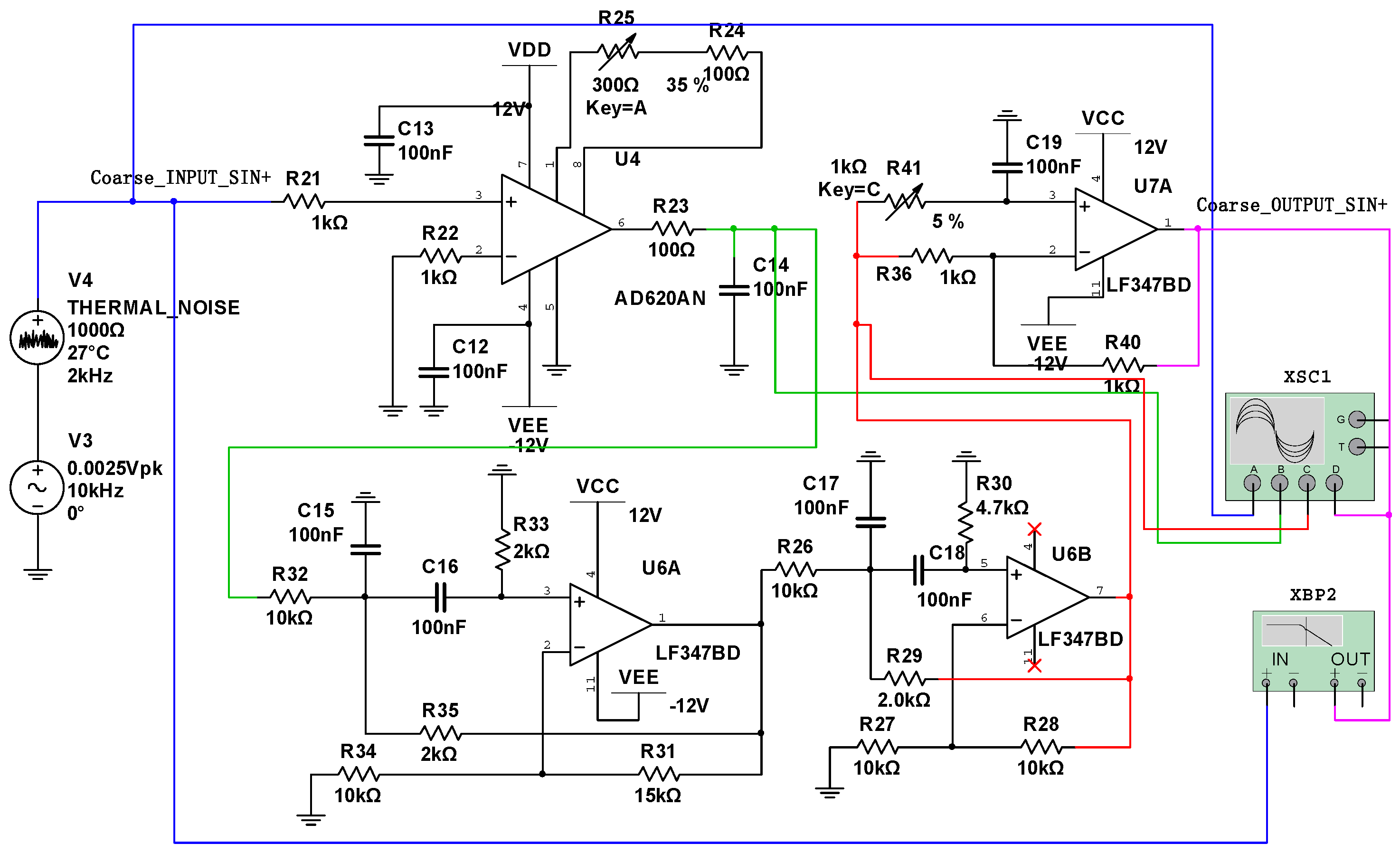
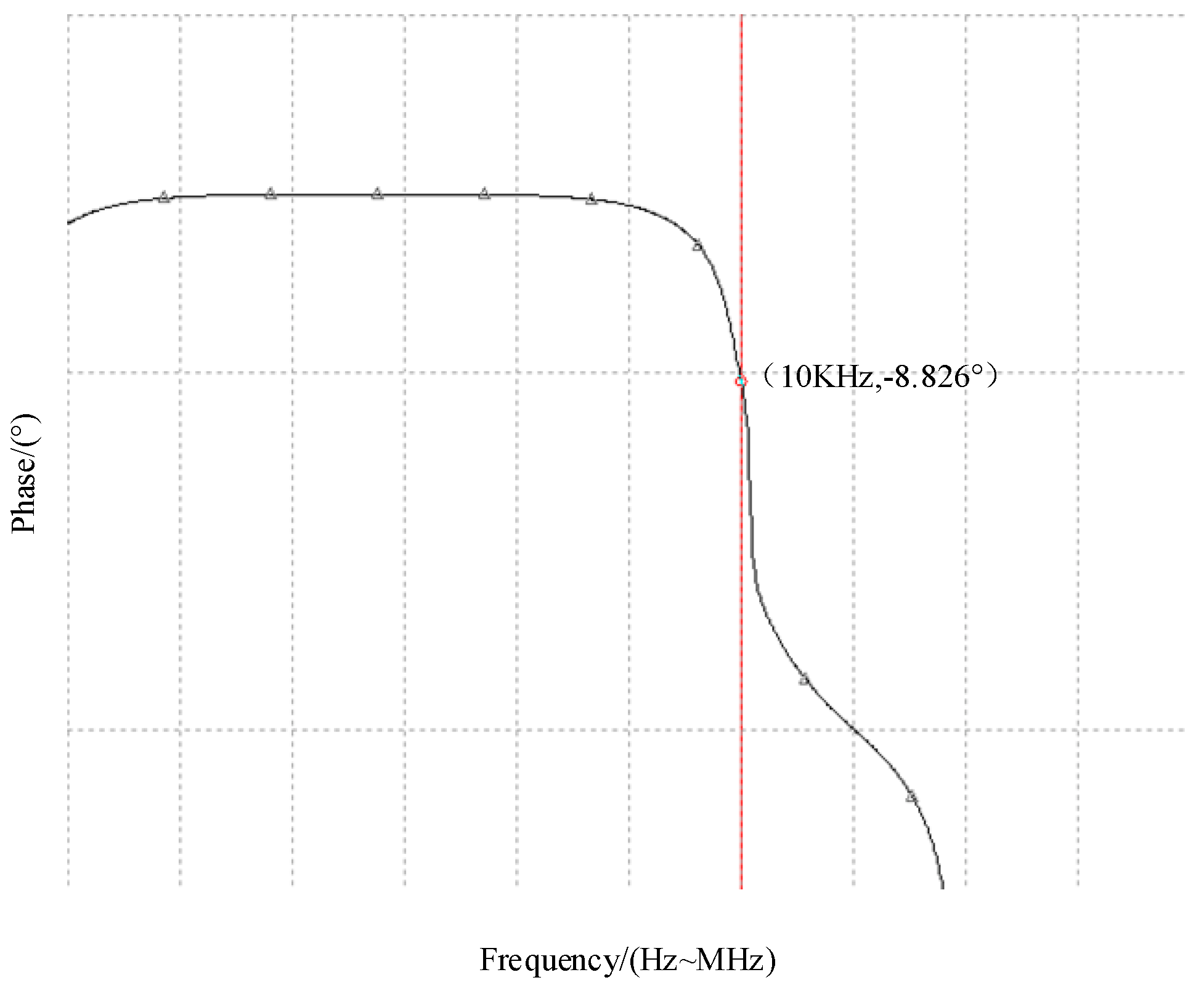
3.3. Design of Induced-Signal Processing Circuit
4. Experimental and Analysis
4.1. Multisim Simulation Experiment
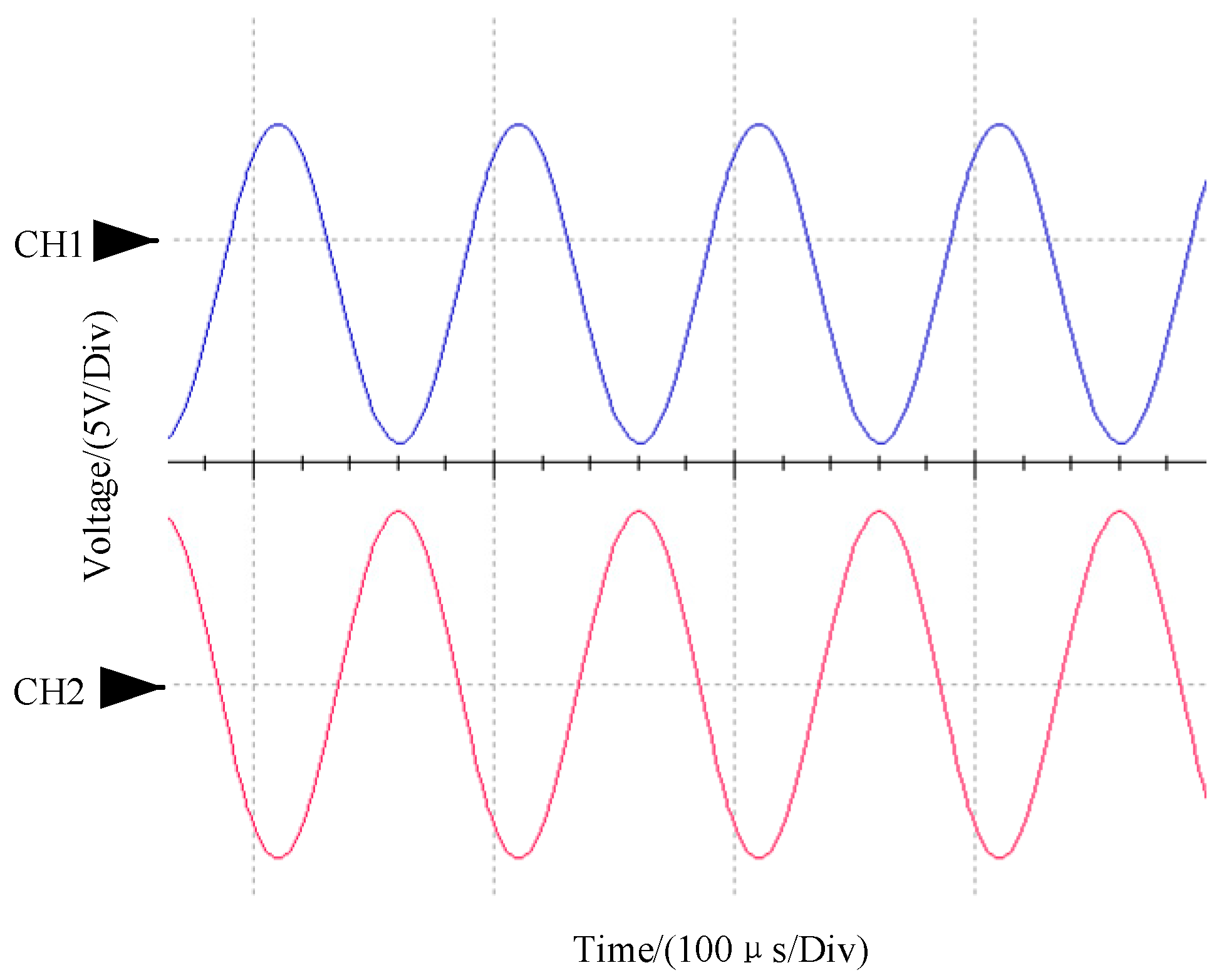
4.1.1. Power-Amplifier Circuit—Multisim Simulation Experiment
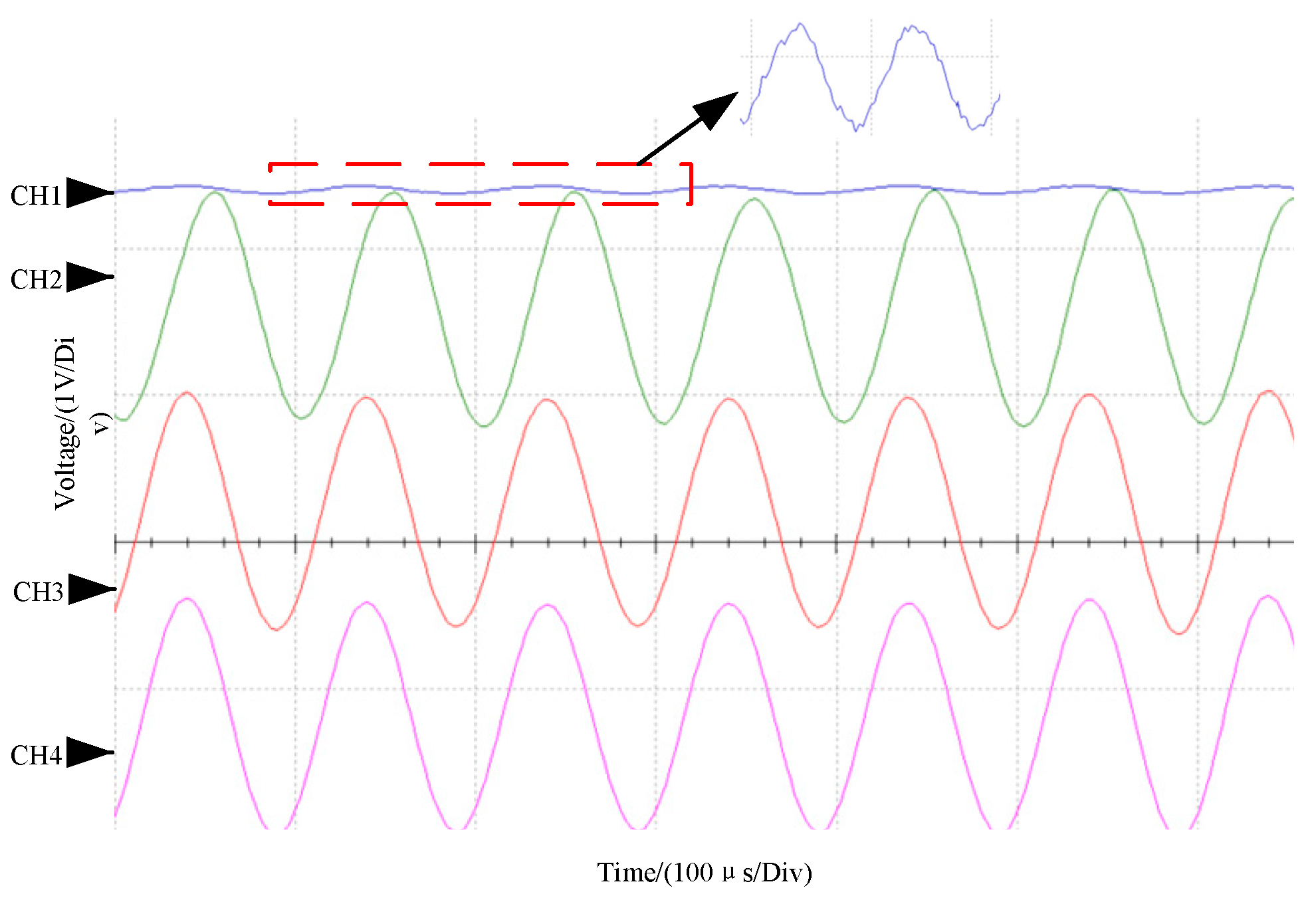
4.1.2. Induced-Signal Processing Circuit—Multisim Simulation Experiment
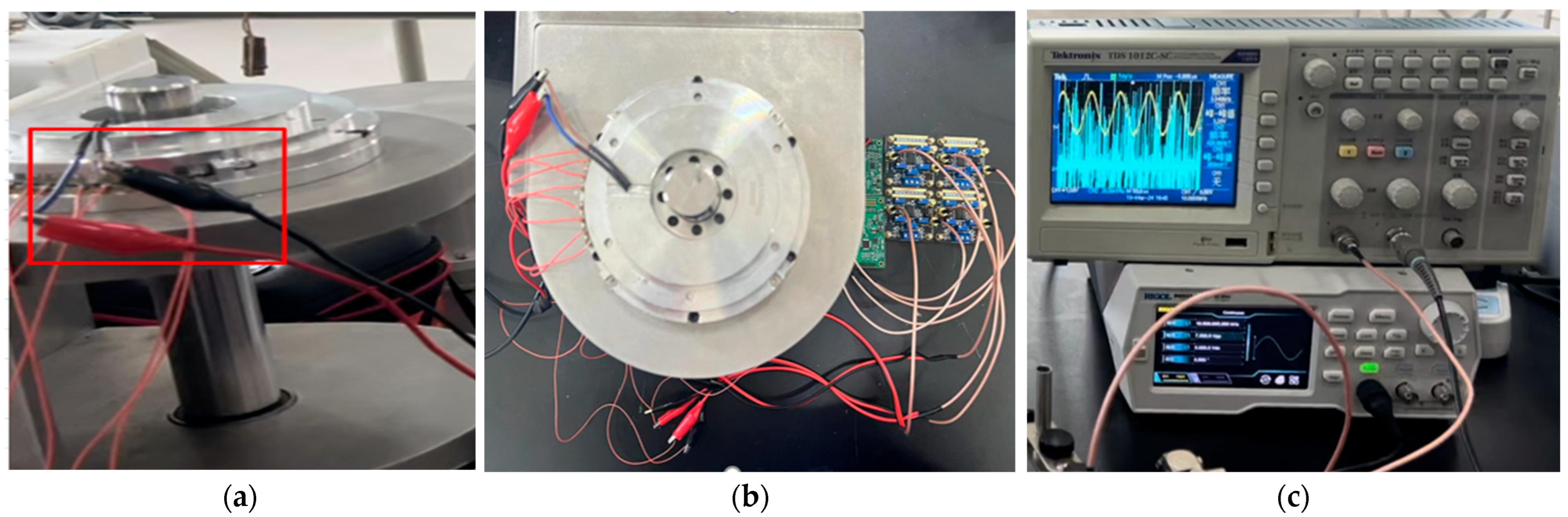
4.2. Physical Experiment
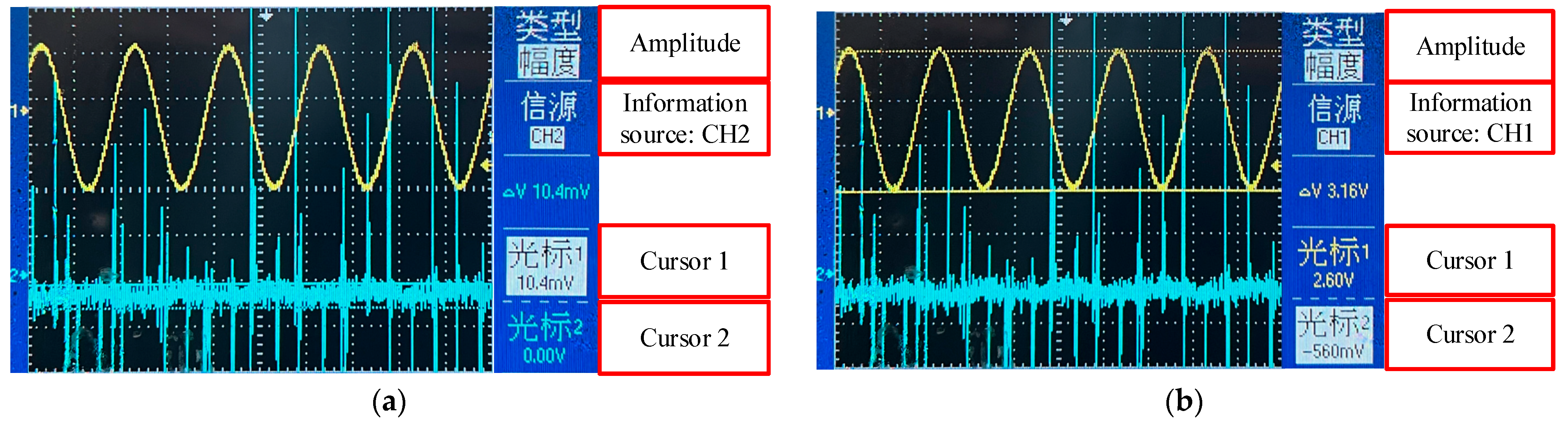
4.2.1. Excitation-Signal Power-Amplification Circuit Testing Experiment
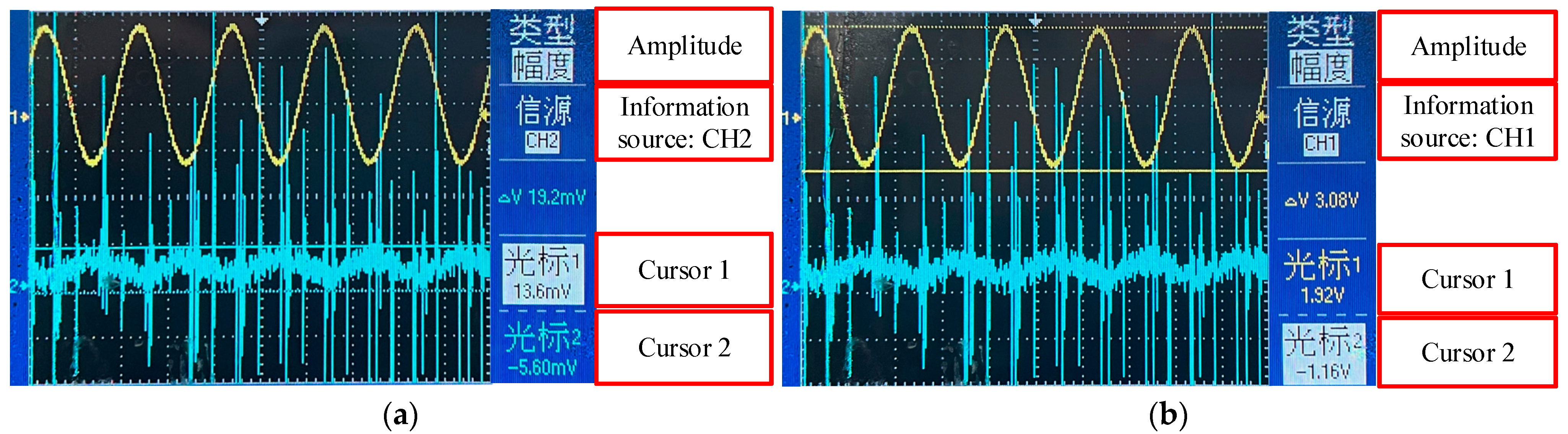
4.2.2. Induced-Signal Processing Circuit Test Experiment
4.3. Experimental Results Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, L.; Yuan, L.; Wang, L.; Zheng, R.; Wang, X.-Y.; Wu, Y.-P. Influence of micro vibration on measurement and pointing control system of high performance spacecraft from Hubble Space Telescope. Opt. Precis. Eng. 2020, 28, 2478–2487. [Google Scholar] [CrossRef]
- Liu, X.; Hu, W.; Ding, W.; Xu, H.; Zhang, Y. Research on Multi-Parameter Identification Method of Permanent Magnet Synchronous Motor. Trans. China Electrotech. Soc. 2020, 35, 1198–1207. [Google Scholar]
- Yi, Z.; Zhang, M.; Wei, H. High Precision Rotor Position Observation of Permanent Magnet Synchronous Motor Based on Hall Sensors. Trans. China Electrotech. Soc. 2019, 34, 4642–4650. [Google Scholar]
- Shen, Y.; Xu, Y.; Sheng, X.; Wan, S.; Yin, X. Vibration Energy Transfer Characteristics of Panels with Multiple Coupling Forms in Satellites. Int. J. Aeronaut. Space Sci. 2023, 24, 1231–1243. [Google Scholar] [CrossRef]
- Mu, G.; Cai, T.; Yan, G.; Liu, H.; Liu, S. Bidirectional power constraints and influence of doubly fed induction generator participating incontinuous frequency regulation. Trans. China Electrotech. Soc. 2019, 34, 3620–3630. [Google Scholar]
- Zhao, Y.; Han, B.; Chen, B. Speed and Rotor Position Estimation for PMSM Based on Hall Vector Phase-Tracking. Trans. China Electrotech. Soc. 2019, 34, 3147–3156. [Google Scholar]
- Cui, J.; Wang, X.; Xu, C. Design of high precision angle measuring system based on two speed resolver. Electron. Des. Eng. 2018, 26, 136–144. [Google Scholar]
- Lin, J.; Chen, W.; Xia, Z.; Hu, J. Multi-channel Induction Synchronizer's High-Precision Fusion and Implementation on FPGA. J. Astronaut. Metrol. Meas. 2021, 41, 57–62. [Google Scholar]
- Huo, Y.; Ren, S.; Li, W. Measurement method for sector etching error of round inductosyn. Electr. Mach. Control 2019, 23, 19–26. [Google Scholar]
- Liu, C.; Zhang, Y.; Sun, J. Harmonic Suppression of Output Potential of Small Size Double-RowWinding Inductosyn. Trans. China Electrotech. Soc. 2023, 38, 91–99. [Google Scholar]
- Wang, Y.; Bao, P.; Chen, J.; Wang, H.; Cheng, X. Design of resolver signal decoding based on FPGA. Electron. Des. Eng. 2022, 30, 75–79. [Google Scholar]
- Arita, S.; Yamagiwa, Y. Relationship between Magnetic Field Interference and Electromagnetic Drag in Multicoil Magnetic Sails. Int. J. Aeronaut. Space Sci. 2023, 24, 1336–1345. [Google Scholar] [CrossRef]
- An, S.; Bai, C.; Li, M.; Zheng, J. Design and Implementation of Angle and Position Decoding Circuit for Servo System. Aeronaut. Comput. Tech. 2020, 50, 116–119. [Google Scholar]
- Li, T.; Qi, X.; Xia, Z. Analysis of Influence of Induction Synchronizer Pre-Processing Analog Circuit Error on System Measurement Accuracy. J. Astronaut. Metrol. Meas. 2019, 36, 57–61. [Google Scholar]
- Yu, A.; Wang, C.; Guo, X.; Li, Z.; Zhang, C.; Guerrero, J.M. New Rotor Position Redundancy Decoding Method Based on Resolver Decoder. Micrimachines 2022, 13, 903. [Google Scholar] [CrossRef]
- Jiang, Y. Research on Absolute Inductosyn Angle Measuring System. Harbin Institute of Technology: Harbin, China, 2022. [Google Scholar]
- Wang, F.; Fu, J.; Han, J. Design and Realization of absolute Round Inductosyn Angle Measuring System Based on FPGA. INFRARED 2017, 18, 31–36. [Google Scholar]
- Han, J.; Zhang, H.; Du, Y. Research of Signal Processing Technology of Flap and Slat Angle Transducer Based on Sine and Cosine Rotating Transformer. Aeronaut. Sci. Technol. 2023, 34, 82–88. [Google Scholar]
- Filippo, L.; Pratticò, D.; Angiulli, G.; Oliva, G.; Pullano, S.A.; Versaci, M.; La Foresta, F. Development of an integrated System of sEMG Signal Acquisition, Processing, and Analysis with Al Technigues. Signals 2024, 5, 476–493. [Google Scholar]
- Fayazi, M.; Colter, Z.; Afshari, E.; Dreslinski, R. Applications of Artificial Intelligence on the odelingand Optimization for Analog and Mixed-Signal Circuits: A Review. IEEE Trans. Circuits Syst. Regul. Pap. 2021, 68, 2418–2431. [Google Scholar] [CrossRef]
- Rayan, M.; Jabbour, C.; Sakr, G.E. A Review of Machine Learning Techniques in Analog integrated Circuit Design Automation. Electronics 2022, 11, 435. [Google Scholar] [CrossRef]
- Li, M.; An, S.; Duan, Y. A position decoding and monitoring method for rotary transformers based on AD2S1210. Inf. Technol. Informatiz. 2021, 4, 139–140. [Google Scholar]
- Lou, M.; Zhao, Y. Research on angle measurement technology based on high-precision AD axis angle conversion chip. Technol. Innov. Appl. 2019, 28, 163–164. [Google Scholar]
- Song, J.; Wang, Y.; Wu, J.; Guo, Z. Research on Rotor Angle Detection of Permanent Magnet Motor Based on TMS320F28377. Electr. Mach. Control Appl. 2022, 49, 43–47+68. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Type | Design Specifications |
|---|---|
| Excitation Signal Amplitude | 7.2 Vp-p ± 1.0 V |
| Induced signal amplitude(single-ended) | 1.6 Vp-p ± 0.3 V |
| Induced Signal Amplitude (Differential) | 3.2 Vp-p ± 0.6 V |
| Amplitude Difference between the SIN and COS Terminals | <0.1 V |
| Phase Difference between the SIN and COS Terminals | <5.0° |
| Phase Difference between Induced and Excitation Signal | <44.0° |
| Channel | Signal Type | Amplitude |
|---|---|---|
| CH1 | SIN+ Original Induced Signal | 4.8 mVp-p |
| CH2 | Amplifier Output Signal | 1.5 Vp-p |
| CH3 | Filtered Output Signal | 1.6 Vp-p |
| CH4 | Phase-shifted Output Signal | 1.6 Vp-p |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Hu, Z.; Chen, J.; Wang, J.; Zhou, Y. Design and Signal-Decoding Test Verification of Dual-Channel Round Inductosyn Decoding Circuit. Appl. Sci. 2024, 14, 9801. https://doi.org/10.3390/app14219801
Wang J, Hu Z, Chen J, Wang J, Zhou Y. Design and Signal-Decoding Test Verification of Dual-Channel Round Inductosyn Decoding Circuit. Applied Sciences. 2024; 14(21):9801. https://doi.org/10.3390/app14219801
Chicago/Turabian StyleWang, Jianyuan, Zhuochen Hu, Jinbao Chen, Jian Wang, and Yiling Zhou. 2024. "Design and Signal-Decoding Test Verification of Dual-Channel Round Inductosyn Decoding Circuit" Applied Sciences 14, no. 21: 9801. https://doi.org/10.3390/app14219801
APA StyleWang, J., Hu, Z., Chen, J., Wang, J., & Zhou, Y. (2024). Design and Signal-Decoding Test Verification of Dual-Channel Round Inductosyn Decoding Circuit. Applied Sciences, 14(21), 9801. https://doi.org/10.3390/app14219801