

A Loose Integration of High-Rate GNSS and Strong-Motion Records with Variance Compensation Adaptive Kalman Filter for Broadband Co-Seismic Displacements

Abstract
1. Introduction
2. Materials and Methods
2.1. High-Rate GNSS and SM Loose Integration System Functions
2.2. Variance Compensation Adaptive Kalman Filter for High-Rate GNSS and SM Loose Integration
- Take high-rate GNSS time series displacement and SM time series acceleration as input data.
- Determine the initial value of the VC-AKF model, including: initial state vector and its covariance matrix and the system noise matrix .
- Build the VC-AKF model according to Equations (4)–(16).
- Calculate the one-step prediction value , predicted covariance value and gain matrix .
- Implement the VC-AKF model, calculate and correct the system noise covariance matrix .
- Return to (4), recursive calculations.
- Obtain the filtered value and the covariance matrix after each calculation.
3. Experiments and Results
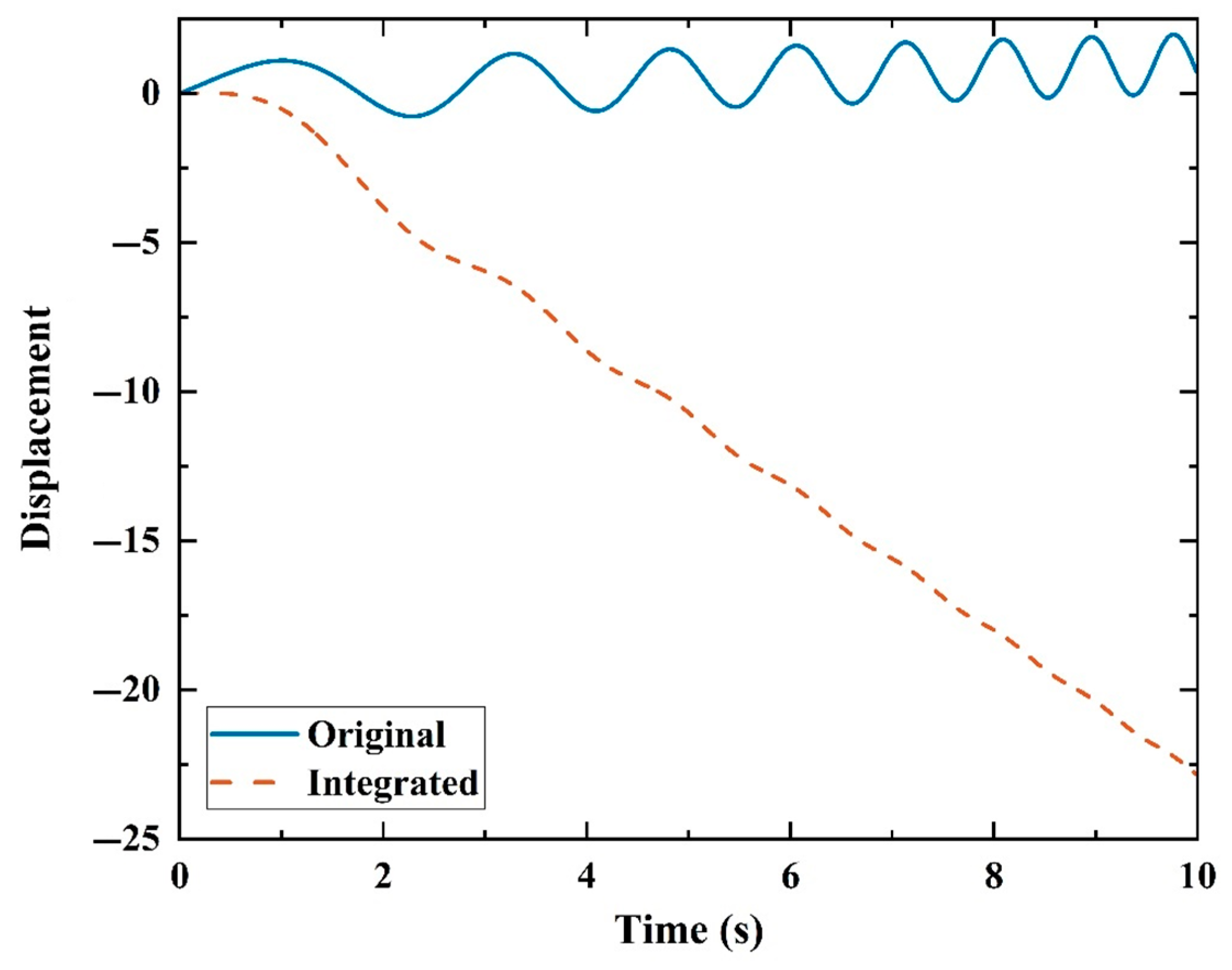
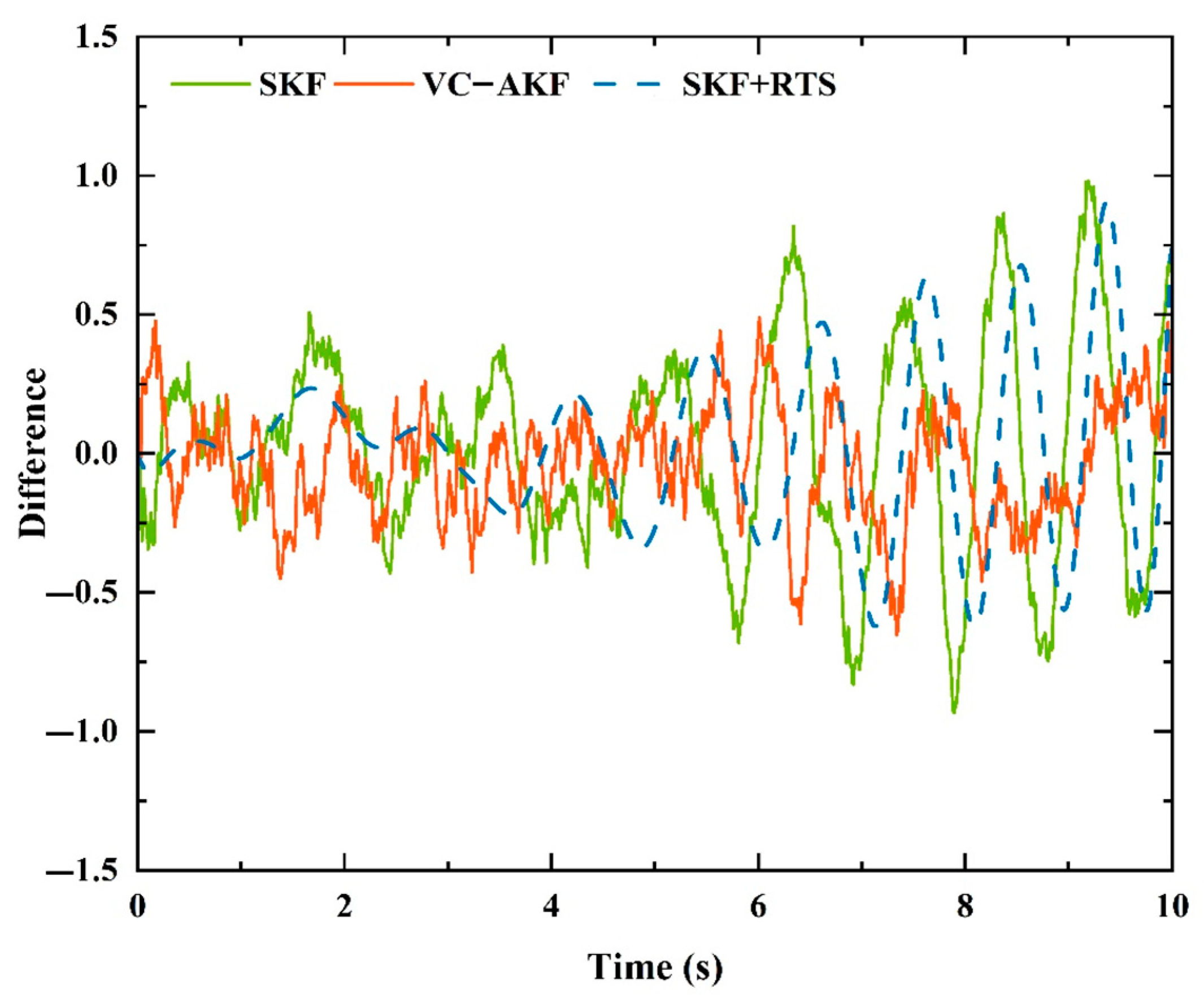
3.1. Simulation Experiment
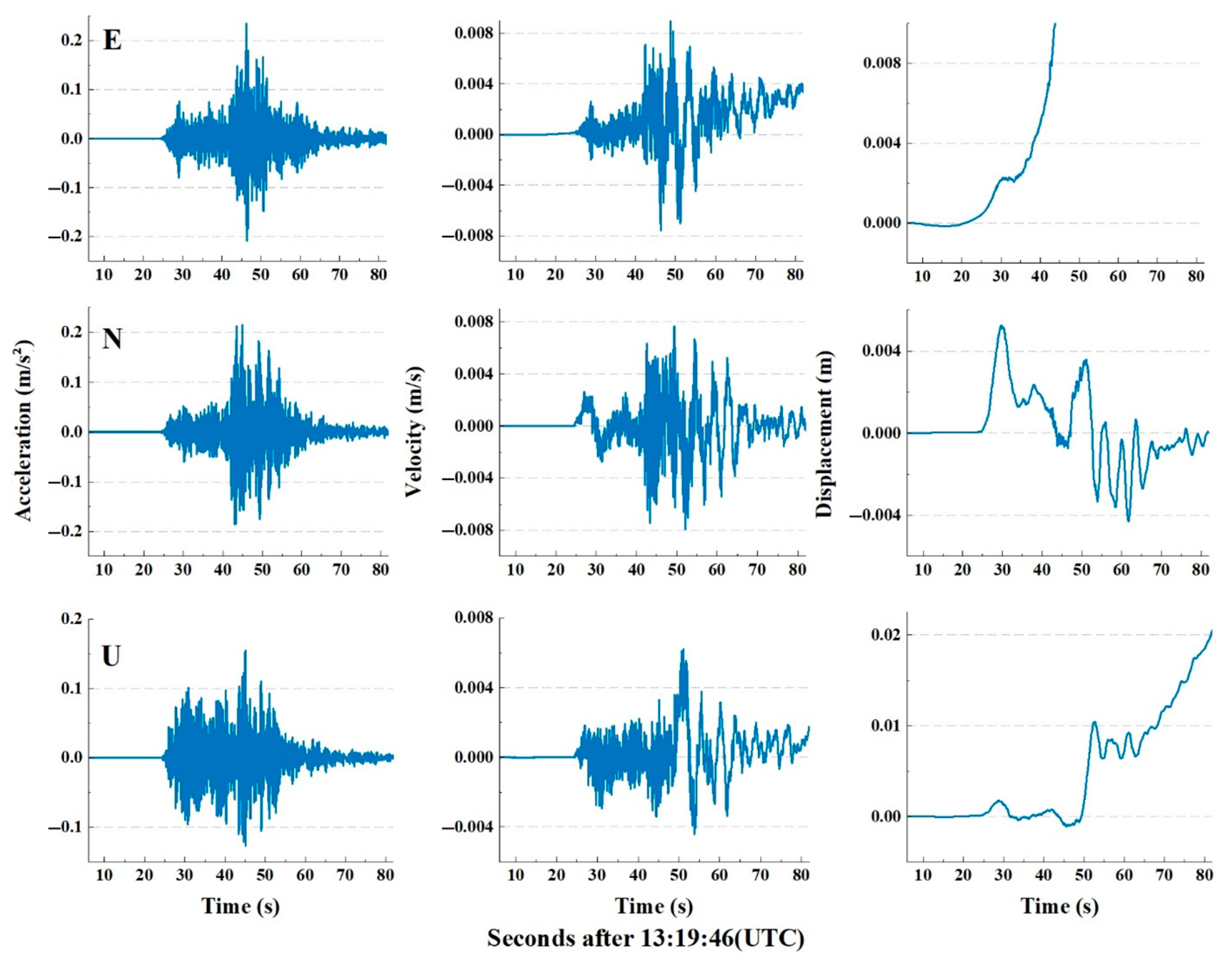
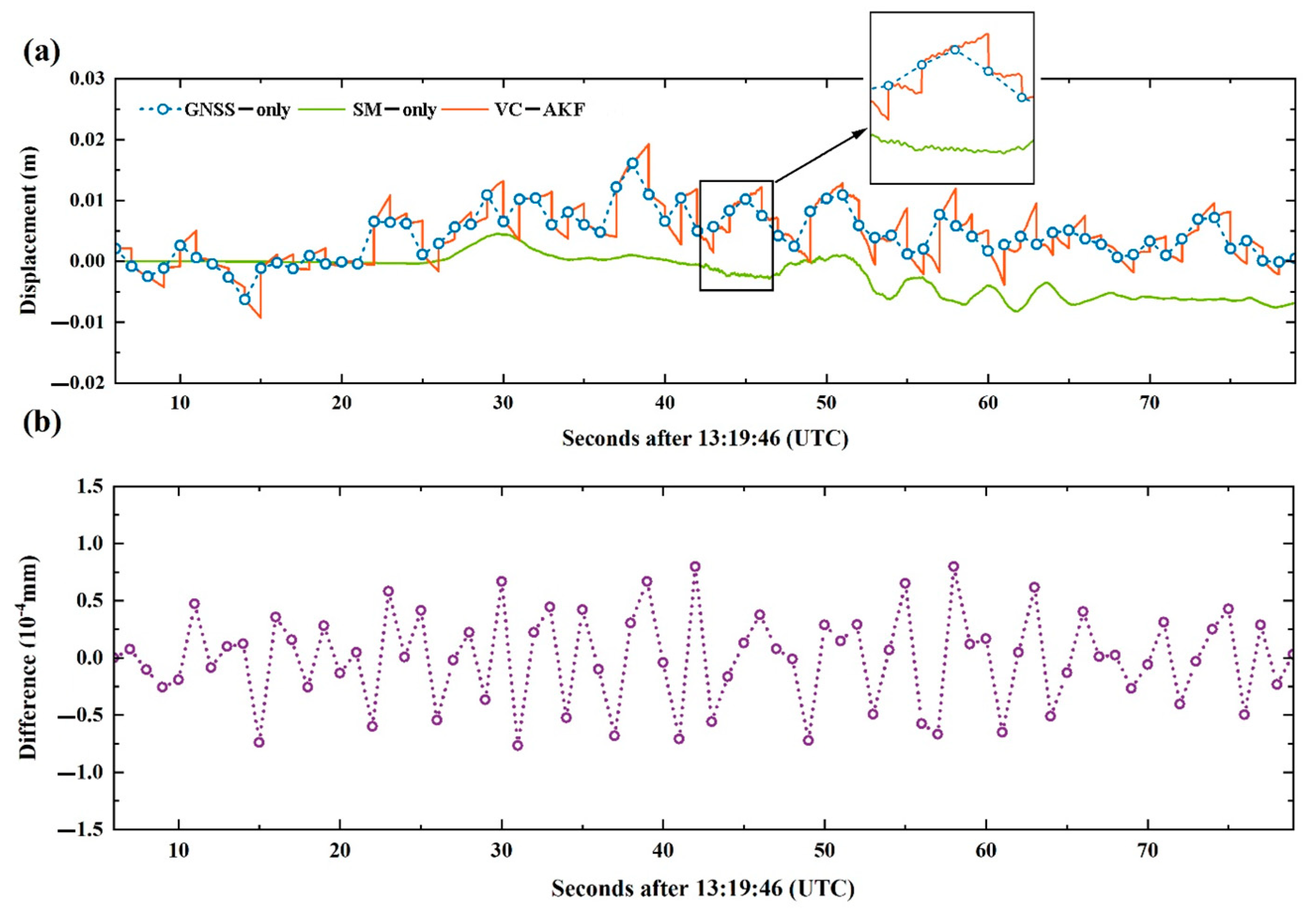
3.2. Application in the 2017 Ms 7.0 Jiuzhaigou Earthquake
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ming-Pei, J.; Rong-Jiang, W.; Hong-Wei, T. Slip Model and Co-Seismic Displacement Field Derived from Near-Source Strong Motion Records of the Lushan M s 7.0 Earthquake on 20 April 2013. Chin. J. Geophys. 2014, 57, 25–34. [Google Scholar] [CrossRef]
- Wang, Y.S.; Li, X.J. Analysis on the Mechanism for Baseline Drift of Near-Fault Accelerograms. AMM 2012, 166–169, 2078–2082. [Google Scholar] [CrossRef]
- Graizer, V.M. Determination of the True Ground Displacement by Using Strong Motion Records. Phys. Solid Earth 1979, 15, 875–885. [Google Scholar]
- Graizer, V. Strong Motion Recordings and Residual Displacements: What Are We Actually Recording in Strong Motion Seismology? Seismol. Res. Lett. 2010, 81, 635–639. [Google Scholar] [CrossRef]
- Graizer, V.M. Effect of Tilt on Strong Motion Data Processing. Soil Dyn. Earthq. Eng. 2005, 25, 197–204. [Google Scholar] [CrossRef]
- Akkar, S.; Boore, D.M. On Baseline Corrections and Uncertainty in Response Spectrafor Baseline Variations Commonly Encounteredin Digital Accelerograph Records. Bull. Seismol. Soc. Am. 2009, 99, 1671–1690. [Google Scholar] [CrossRef]
- Colombelli, S.; Allen, R.M.; Zollo, A. Application of Real-time GPS to Earthquake Early Warning in Subduction and Strike-slip Environments. JGR Solid Earth 2013, 118, 3448–3461. [Google Scholar] [CrossRef]
- Keskin, M.; Akkamış, M.; Sekerli, Y. An Overview of GNSS and GPS Based Velocity Measurement in Comparison to Other Techniques. In Proceedings of the International Conference on Energy Research, Alanya, Turkey, 31 October–2 November 2018. [Google Scholar]
- Dahmen, N.; Hohensinn, R.; Clinton, J. Comparison and Combination of GNSS and Strong-Motion Observations: A Case Study of the 2016 Mw 7.0 Kumamoto Earthquake. Bull. Seismol. Soc. Am. 2020, 110, 2647–2660. [Google Scholar] [CrossRef]
- Catania, P.; Comparetti, A.; Febo, P.; Morello, G.; Orlando, S.; Roma, E.; Vallone, M. Positioning Accuracy Comparison of GNSS Receivers Used for Mapping and Guidance of Agricultural Machines. Agronomy 2020, 10, 924. [Google Scholar] [CrossRef]
- Susilo; Meilano, I.; Hardy, T.; Kautsar, M.A.; Sarsito, D.A.; Efendi, J. Rapid Estimation of Earthquake Magnitude Using GNSS Data. IOP Conf. Ser. Earth Environ. Sci. 2021, 873, 012063. [Google Scholar] [CrossRef]
- Bock, Y.; Nikolaidis, R.M.; de Jonge, P.J.; Bevis, M. Instantaneous geodetic positioning at medium distances with the Global Positioning System. J. Geophys. Res. Solid Earth. 2000, 105, 28223–28253. [Google Scholar] [CrossRef]
- Shengtao, F.; Li, J.; Li, G.; Li, R.; Sulitan, Y.; Aerdake, K. Preliminary horizontal co-seismic displacements caused by the 2023 Mw 7.8 and Mw 7.5 Türkiye earthquakes estimated using high-rate GPS observations. Acta Geophys. 2023, 72, 2977–2984. [Google Scholar] [CrossRef]
- Li, X.; Chen, C.; Liang, H.; Li, Y.; Zhan, W. Earthquake source parameters estimated from high-rate multi-GNSS data: A case study of the 2022 M6.9 Menyuan earthquake. Acta Geophys. 2023, 71, 625–636. [Google Scholar] [CrossRef]
- Miyazaki, S.I.; Larson, K.M.; Choi, K.; Hikima, K.; Koketsu, K.; Bodin, P.; Yamagiwa, A. Modeling the rupture process of the 2003 September 25 Tokachi-Oki (Hokkaido) earthquake using 1-Hz GPS data. Geophys. Res. Lett. 2004, 31, L21603. [Google Scholar] [CrossRef]
- Iinuma, T.; Ohzono, M.; Ohta, Y.; Miura, S. Coseismic slip distribution of the 2011 off the Pacific coast of Tohoku Earthquake (M 9.0) estimated based on GPS data—Was the asperity in Miyagi-oki ruptured? Earth Planets Space 2011, 63, 643–648. [Google Scholar] [CrossRef]
- Yue, H.; Lay, T. Inversion of high-rate (1 sps) GPS data for rupture process of the 11 March 2011 Tohoku earthquake (Mw 9.1). Geophys. Res. Lett. 2011, 38, L00G09. [Google Scholar] [CrossRef]
- Li, Q.; Tan, K.; Wang, D.Z.; Zhao, B.; Zhang, R.; Li, Y.; Qi, Y.J. Joint inversion of GNSS and teleseismic data for the rupture process of the 2017 Mw6. 5 Jiuzhaigou, China, earthquake. J. Seismolog. 2018, 22, 805–814. [Google Scholar] [CrossRef]
- Xu, G.; Xu, X.; Yi, Y.; Wen, Y.; Sun, L.; Wang, Q.; Lei, X. A Bayesian Source Model for the 2022 Mw6.6 Luding Earthquake, Sichuan Province, China, Constrained by GPS and InSAR Observations. Remote Sens. 2024, 16, 103. [Google Scholar] [CrossRef]
- Su, X.; Meng, G.; Su, L.; Wu, W.; Liu, T. Coseismic and early postseismic deformation of the 2016 Mw 7.8 Kaikōura earthquake, New Zealand, from continuous GPS observations. Pure Appl. Geophys. 2020, 177, 285–303. [Google Scholar] [CrossRef]
- Zang, J.; Xu, C.; Wen, Y.; Wang, X.; He, K. Rapid Earthquake Source Description Using Variometric-Derived GPS Displacements toward Application to the 2019 Mw 7.1 Ridgecrest Earthquake. Seismol. Res. Lett. 2021, 93, 56–67. [Google Scholar] [CrossRef]
- Wright, T.J.; Houlié, N.; Hildyard, M.; Iwabuchi, T. Real-time, reliable magnitudes for large earthquakes from 1 Hz GPS precise point positioning: The 2011 Tohoku-Oki (Japan) earthquake. Geophys. Res. Lett. 2012, 39, L12302. [Google Scholar] [CrossRef]
- Gao, Z.; Li, Y.; Shan, X.; Zhu, C. Earthquake Magnitude Estimation from High-Rate GNSS Data: A Case Study of the 2021 Mw 7.3 Maduo Earthquake. Remote Sens. 2021, 13, 4478. [Google Scholar] [CrossRef]
- Jessica, R.M.; Brendan, W.C.; Mark, H.M.; Carl, W.U.; Jeffrey, J.M.; Mario, A.A.; Mike, T.H. Incorporation of Real-Time Earthquake Magnitudes Estimated via Peak Ground Displacement Scaling in the ShakeAlert Earthquake Early Warning System. Bull. Seismol. Soc. Am. 2023, 113, 1286–1310. [Google Scholar]
- Li, X.; Ge, M.; Zhang, X.; Zhang, Y.; Guo, B.; Wang, R.; Wickert, J. Real-time high-rate co-seismic displacement from ambiguity-fixed precise point positioning: Application to earthquake early warning. Geophys. Res. Lett. 2013, 40, 295–300. [Google Scholar] [CrossRef]
- Saunders, J.K.; Goldberg, D.E.; Haase, J.S.; Bock, Y.; Offield, D.G.; Melgar, D.; Mattioli, G.S. Seismogeodesy using GPS and low-cost MEMS accelerometers: Perspectives for earthquake early warning and rapid response. Bull. Seismol. Soc. Am. 2016, 106, 2469–2489. [Google Scholar] [CrossRef]
- Geng, J.; Bock, Y.; Melgar, D.; Crowell, B.W.; Haase, J.S. A new seismogeodetic approach applied to GPS and accelerometer observations of the 2012 Brawley seismic swarm: Implications for earthquake early warning. Geochem. Geophys. Geosyst. 2013, 14, 2124–2142. [Google Scholar] [CrossRef]
- Grooms, I.; Riedel, C. A Quantile-Conserving Ensemble Filter Based on Kernel-Density Estimation. Remote Sens. 2024, 16, 2377. [Google Scholar] [CrossRef]
- Michel, C.; Kelevitz, K.; Houlié, N.; Edwards, B.; Psimoulis, P.; Su, Z. The potential of high-rate gps for strong ground motion assessment. Bull. Seismol. Soc. Am. 2017, 107, 1849–1859. [Google Scholar] [CrossRef]
- Emore, G.L.; Haase, J.S.; Choi, K.; Larson, K.M.; Yamagiwa, A. Recovering seismic displacements through combined use of 1-Hz GPS and strong-motion accelerometers. Bull. Seismol. Soc. Am. 2007, 97, 357–378. [Google Scholar] [CrossRef]
- Wang, R.; Schurr, B.; Milkereit, C.; Shao, Z.; Jin, M. An improved automatic scheme for empirical baseline correction of digital strong-motion records. Bull. Seismol. Soc. Am. 2011, 101, 2029–2044. [Google Scholar] [CrossRef]
- Tu, R.; Wang, R.; Ge, M.; Walter, T.R.; Ramatschi, M.; Milkereit, C.; Dahm, T. Cost-effective monitoring of ground motion related to earthquakes, landslides, or volcanic activity by joint use of a single-frequency GPS and a MEMS accelerometer. Geophys. Res. Lett. 2013, 40, 3825–3829. [Google Scholar] [CrossRef]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative Parallel Particle Filters for Online Model Selection and Applications to Urban Mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef]
- Urteaga, I.; Bugallo, M.F.; Djuric, P.M. Sequential Monte Carlo Methods under Model Uncertainty. In Proceedings of the 2016 IEEE Statistical Signal Processing Workshop (SSP), Palma de Mallorca, Spain, 26–29 June 2016; pp. 1–5. [Google Scholar]
- Chopin, N.; Jacob, P.E.; Papaspiliopoulos, O. SMC2: An Efficient Algorithm for Sequential Analysis of State Space Models. J. R. Stat. Soc. Ser. B Stat. Methodol. 2013, 75, 397–426. [Google Scholar] [CrossRef]
- Carvalho, M.C.; Johannes, M.S.; Lopes, F.H.; Polson, N.G. Particle Learning and Smoothing. Stat. Sci. 2010, 25, 88–106. [Google Scholar] [CrossRef]
- Smyth, A.; Wu, M. Multi-rate Kalman filtering for the data fusion of displacement and acceleration response measurements in dynamic system monitoring. Mech. Syst. Sig. Process. 2007, 21, 706–723. [Google Scholar] [CrossRef]
- Bock, Y.; Melgar, D.; Crowell, B.W. Real-time strong-motion broadband displacements from collocated GPS and accelerometers. Bull. Seismol. Soc. Am. 2011, 101, 2904–2925. [Google Scholar] [CrossRef]
- Shu, Y.; Fang, R.; Geng, J.; Zhao, Q.; Liu, J. Broadband velocities and displacements from integrated GPS and accelerometer data for high-rate seismogeodesy. Geophys. Res. Lett. 2018, 45, 8939–8948. [Google Scholar] [CrossRef]
- Song, C.; Xu, C. Loose integration of high-rate GPS and strong motion data considering coloured noise. Geophys. J. Int. 2018, 215, 1530–1539. [Google Scholar] [CrossRef]
- Geng, J.; Melgar, D.; Bock, Y.; Pantoli, E.; Restrepo, J. Recovering coseismic point ground tilts from collocated high-rate GPS and accelerometers. Geophys. Res. Lett. 2013, 40, 5095–5100. [Google Scholar] [CrossRef]
- Tu, R.; Ge, M.; Wang, R.; Walter, T.R. A new algorithm for tight integration of real-time GPS and strong-motion records, demonstrated on simulated, experimental, and real seismic data. J. Seismolog. 2014, 18, 151–161. [Google Scholar] [CrossRef]
- Zang, J.; Xu, C.; Chen, G.; Wen, Q.; Fan, S. Real-time coseismic deformations from adaptively tight integration of high-rate GNSS and strong motion records. Geophys. J. Int. 2019, 219, 1757–1772. [Google Scholar] [CrossRef]
- Rauch, H.E.; Tung, F.; Striebel, C.T. Maximum likelihood estimates of linear dynamic systems. AIAA J. 1965, 3, 1445–1450. [Google Scholar] [CrossRef]
- Niu, J.; Xu, C. Real-Time Assessment of the BroadbandCoseismic Deformation of the 2011Tohoku-Oki Earthquake Usingan Adaptive Kalman Filter. Seismol. Res. Lett. 2014, 85, 836–843. [Google Scholar] [CrossRef]
- Silveira, B.B.; Cassé, V.; Chomette, O.; Crevoisier, C. Improving Error Estimates for Evaluating Satellite-Based Atmospheric CO2 Measurement Concepts through Numerical Simulations. Remote Sens. 2024, 16, 2452. [Google Scholar] [CrossRef]
- Raghavan, H.; Tangirala, A.K.; Gopaluni, R.B.; Shah, S.L. Identification of chemical processes with irregular output sampling. Control Eng. Pract. 2006, 14, 467–480. [Google Scholar] [CrossRef]
- Jia, M.; Rizos, C.; Ding, X. A new reliability measure for dynamic surveying systems and its applications in dynamic system quality control. In Proceedings of the 9th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS 1996), Kansas City, MO, USA, 17–20 September 1996. [Google Scholar]
- Davari, N.; Asghar, G. Variational Bayesian adaptive Kalman filter for asynchronous multirate multi-sensor integrated navigation system. Ocean Eng. 2019, 174, 108–116. [Google Scholar] [CrossRef]
- Hu, C.; Chen, W.; Chen, Y.; Liu, D. Adaptive Kalman filtering for vehicle navigation. J. Global. Positioning. Syst. 2003, 2, 42–47. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | RMSE |
|---|---|
| SKF | 0.379 |
| VC-AKF | 0.205 |
| SKF + RTS | 0.294 |
| Station | Latitude (°) | Longitude (°) | Epicentral Distance (km) | Station Spacing (km) |
|---|---|---|---|---|
| GSMX | 34.43 | 104.02 | 137.92 | 3.80 |
| 62MXT | 34.40 | 104.00 | 134.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, R.; Wu, H.; Shen, R.; Kang, J. A Loose Integration of High-Rate GNSS and Strong-Motion Records with Variance Compensation Adaptive Kalman Filter for Broadband Co-Seismic Displacements. Appl. Sci. 2024, 14, 9360. https://doi.org/10.3390/app14209360
Wang R, Wu H, Shen R, Kang J. A Loose Integration of High-Rate GNSS and Strong-Motion Records with Variance Compensation Adaptive Kalman Filter for Broadband Co-Seismic Displacements. Applied Sciences. 2024; 14(20):9360. https://doi.org/10.3390/app14209360
Chicago/Turabian StyleWang, Runjie, Haiqian Wu, Rui Shen, and Junyv Kang. 2024. "A Loose Integration of High-Rate GNSS and Strong-Motion Records with Variance Compensation Adaptive Kalman Filter for Broadband Co-Seismic Displacements" Applied Sciences 14, no. 20: 9360. https://doi.org/10.3390/app14209360
APA StyleWang, R., Wu, H., Shen, R., & Kang, J. (2024). A Loose Integration of High-Rate GNSS and Strong-Motion Records with Variance Compensation Adaptive Kalman Filter for Broadband Co-Seismic Displacements. Applied Sciences, 14(20), 9360. https://doi.org/10.3390/app14209360