

New Concept of Dual-Sinusoid Distributed Fiber-Optic Sensors Antiphase-Placed for the SHM of Smart Composite Structures for Offshore




Abstract
1. Introduction
2. Finite Element Model Features
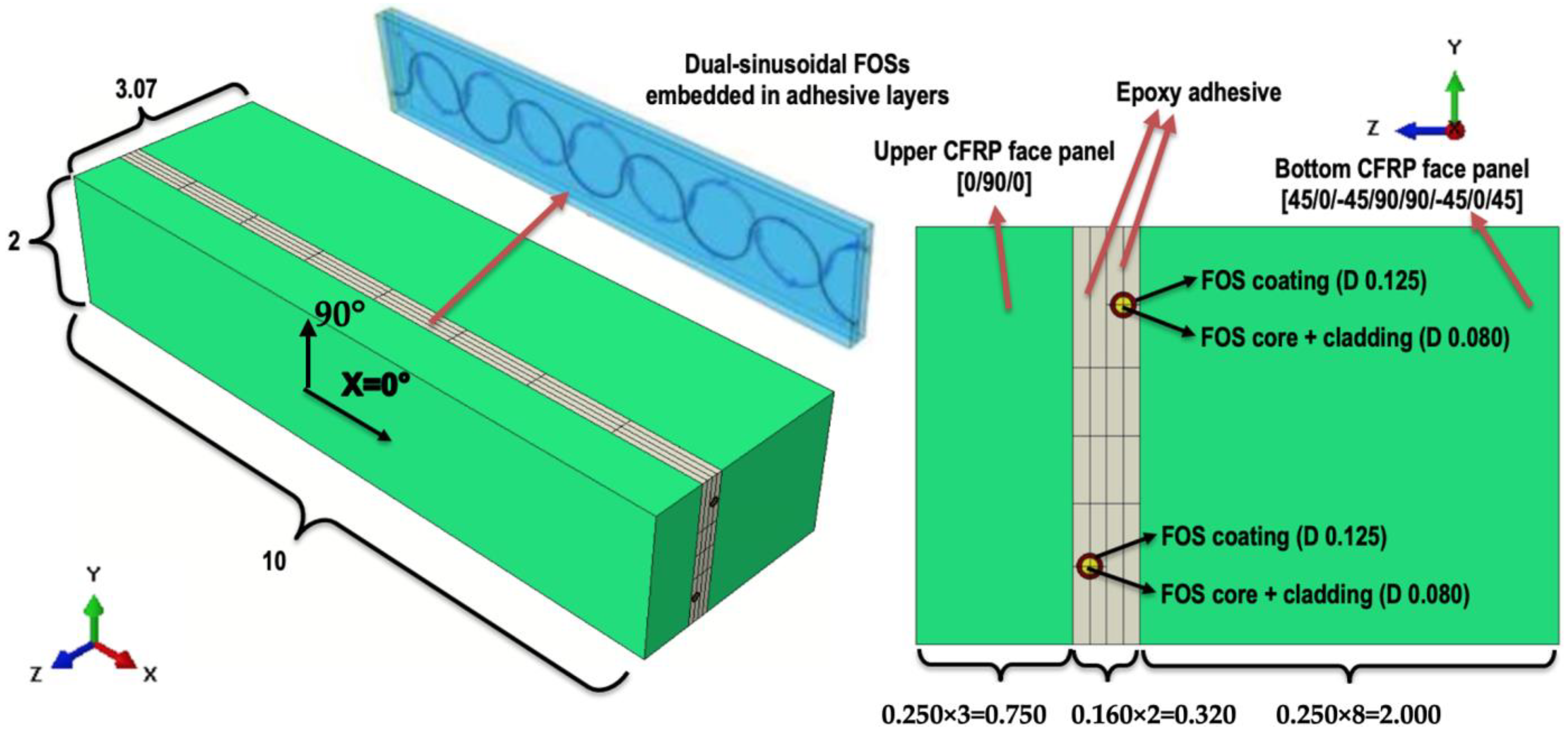
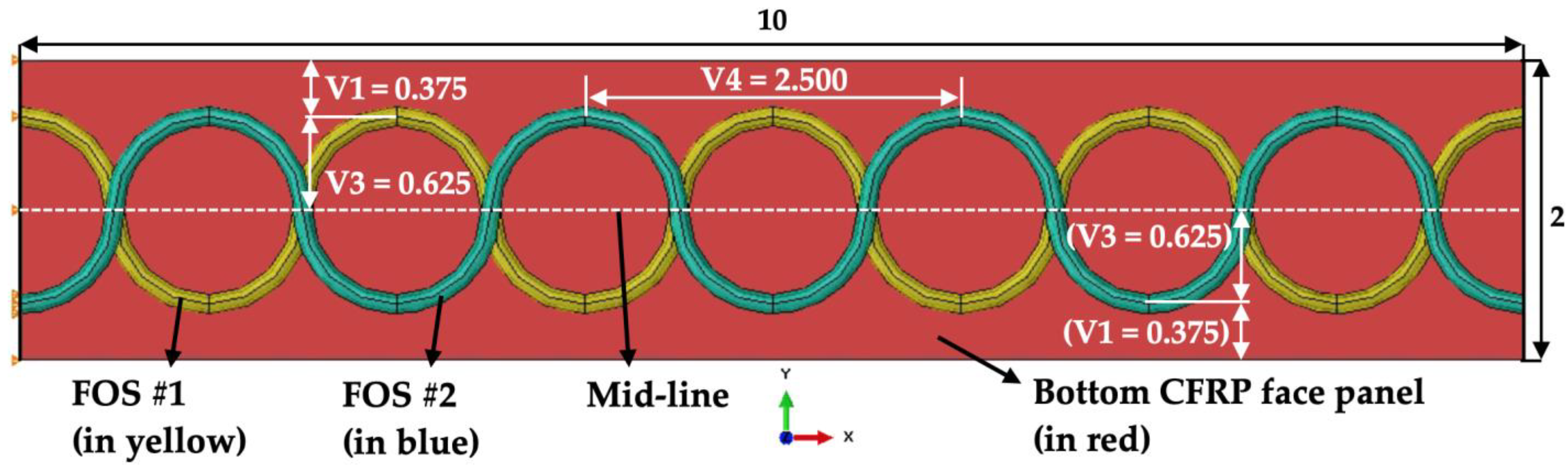
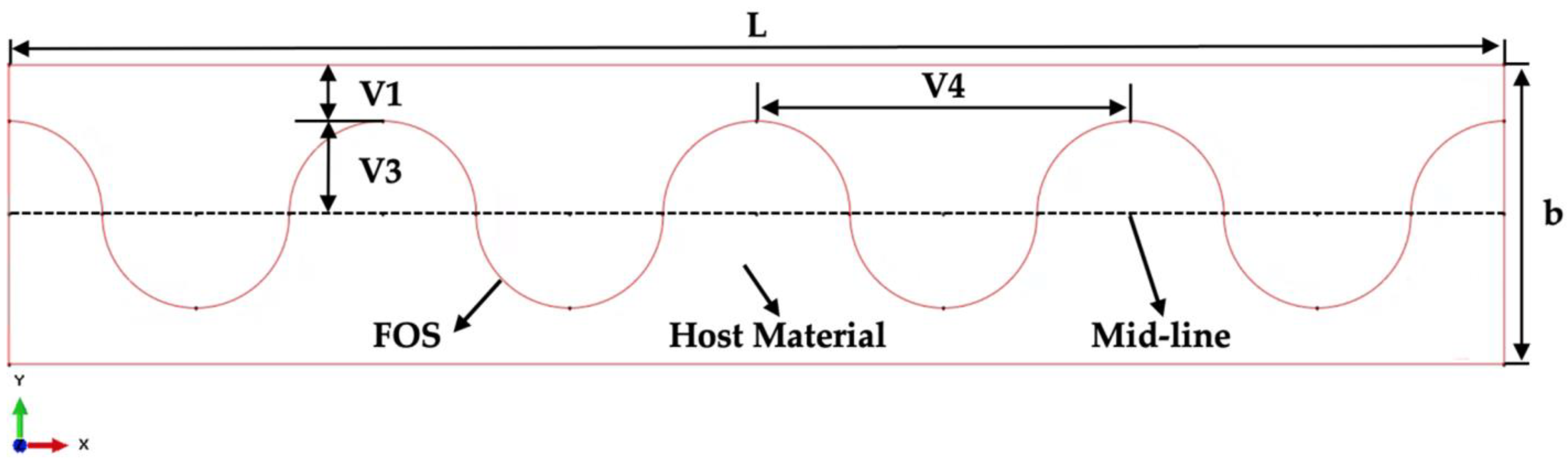
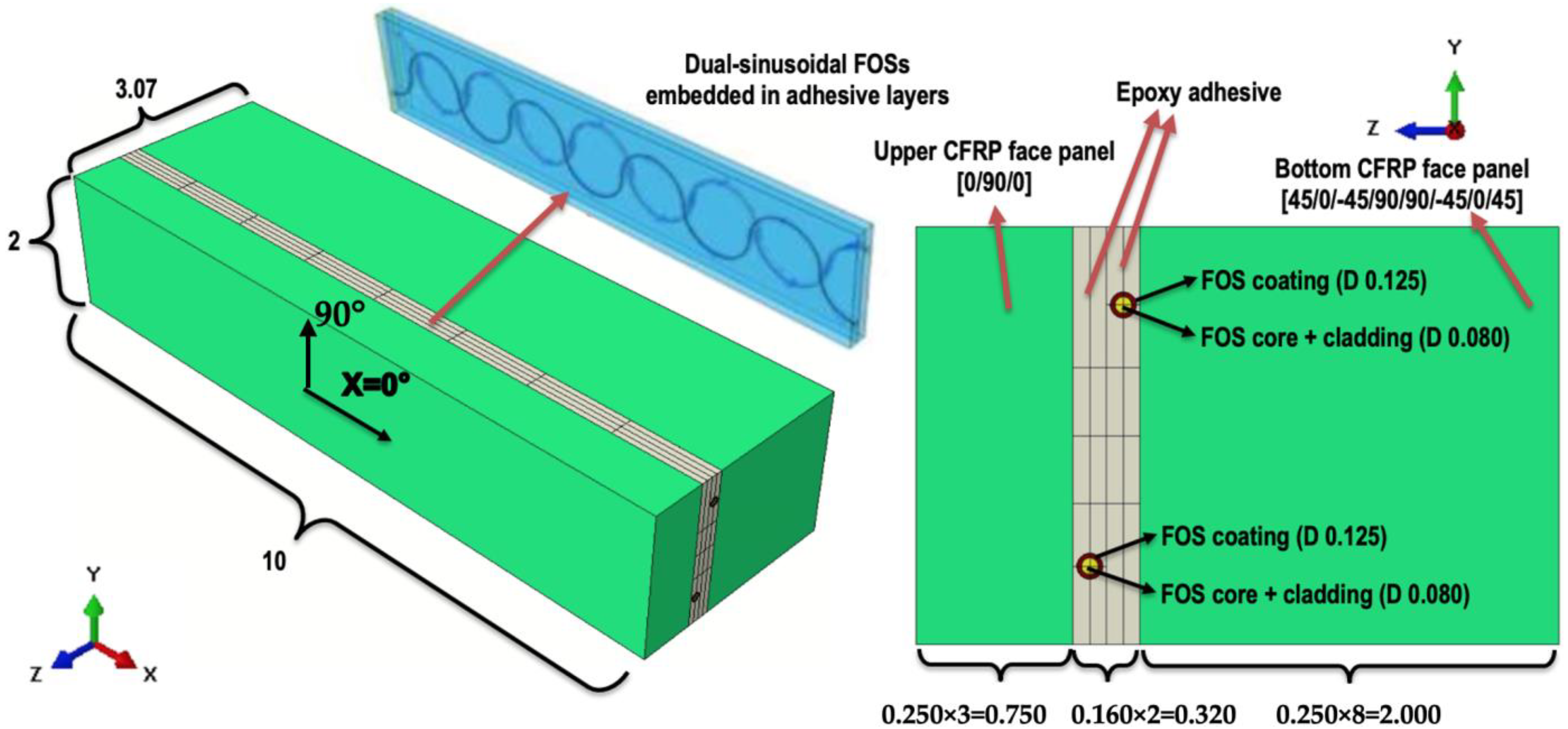
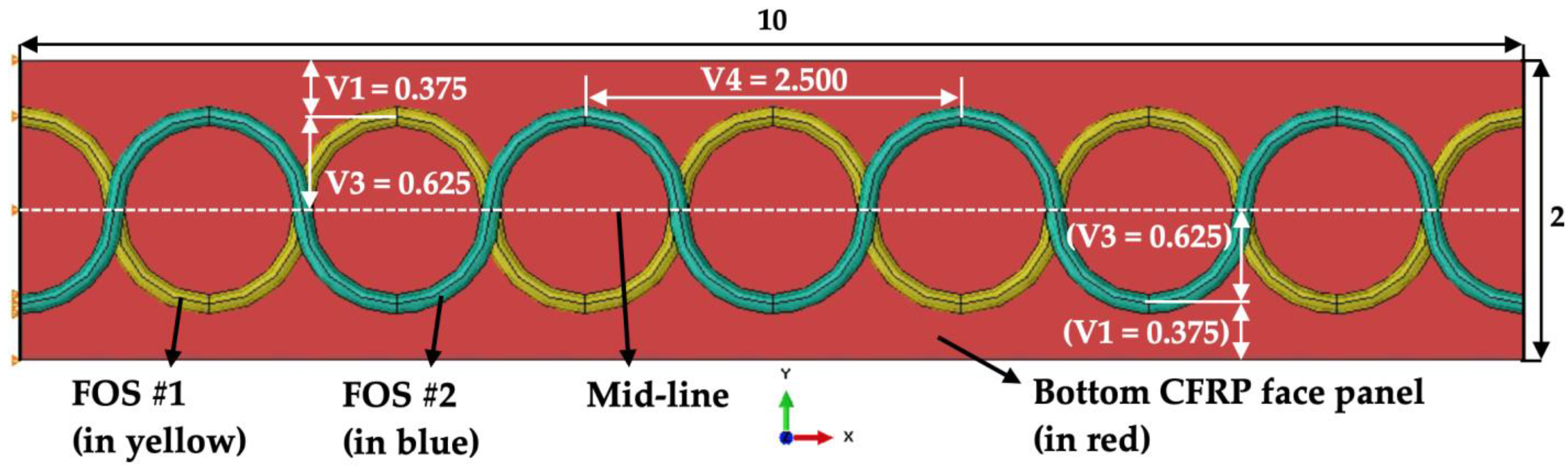
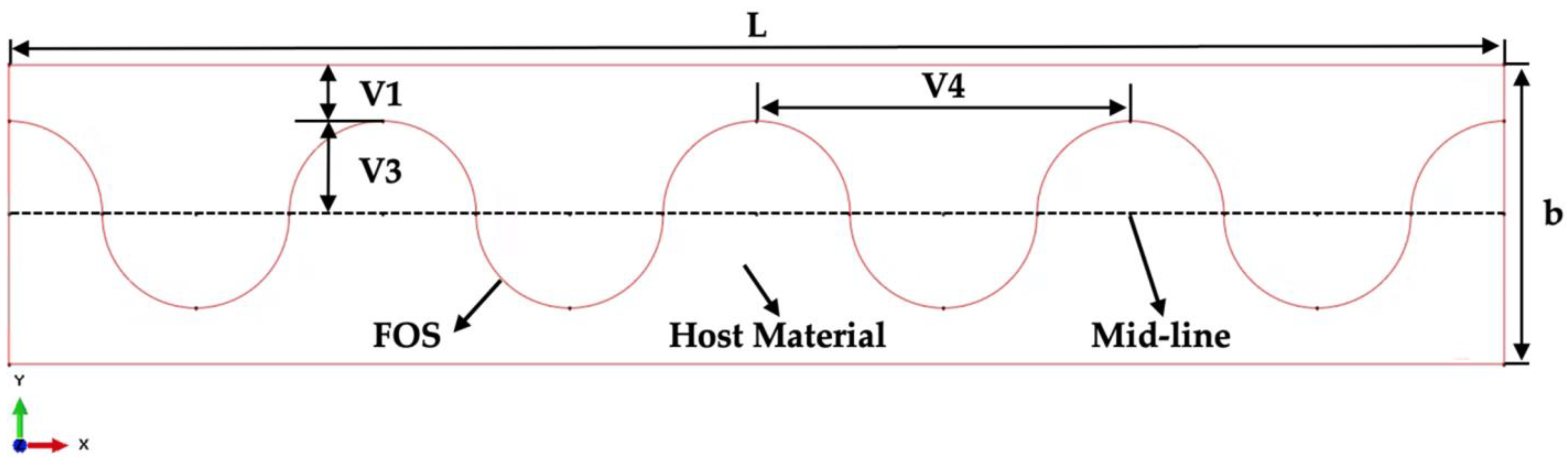
2.1. Solid Models
2.2. Material Properties
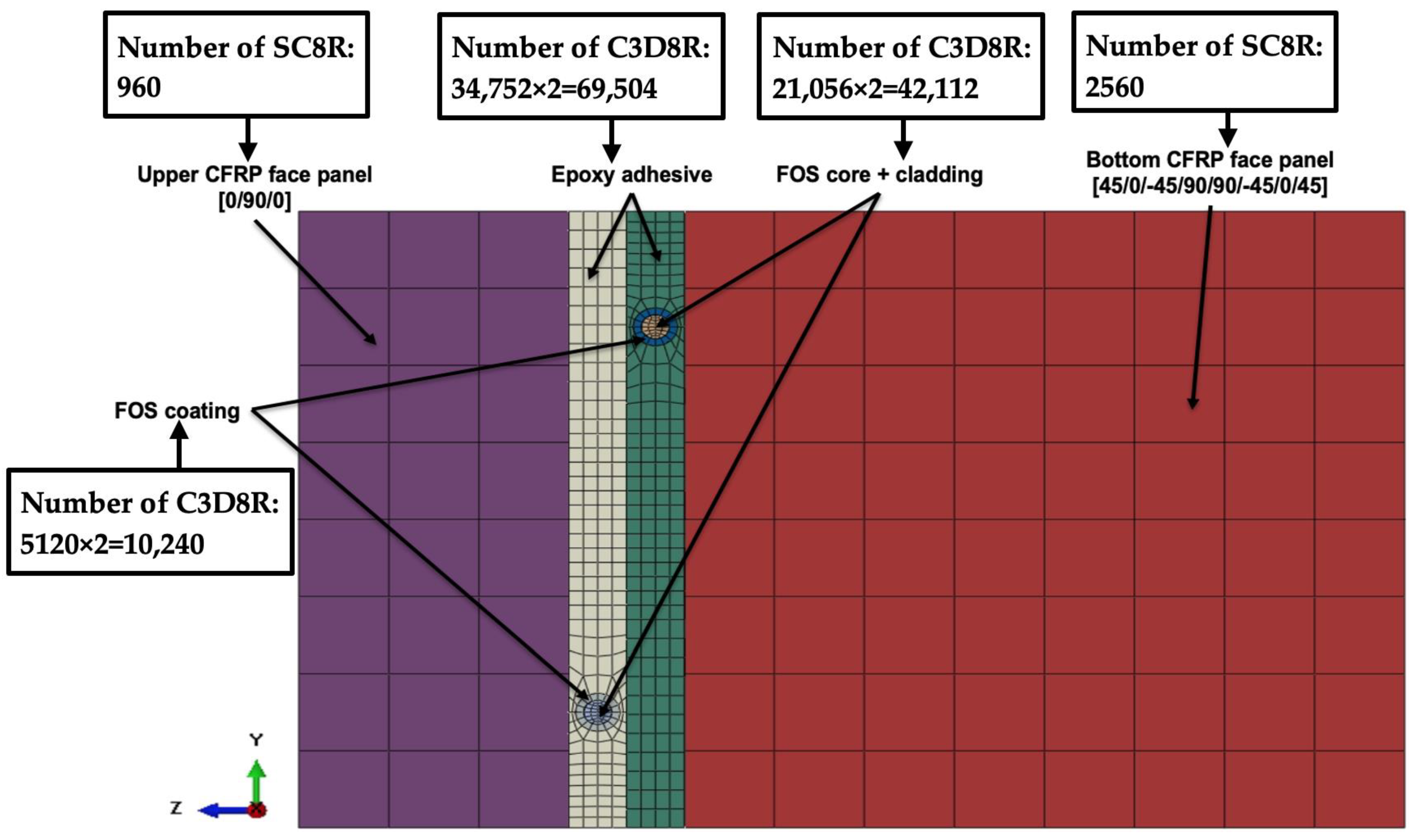
2.3. Mesh Features
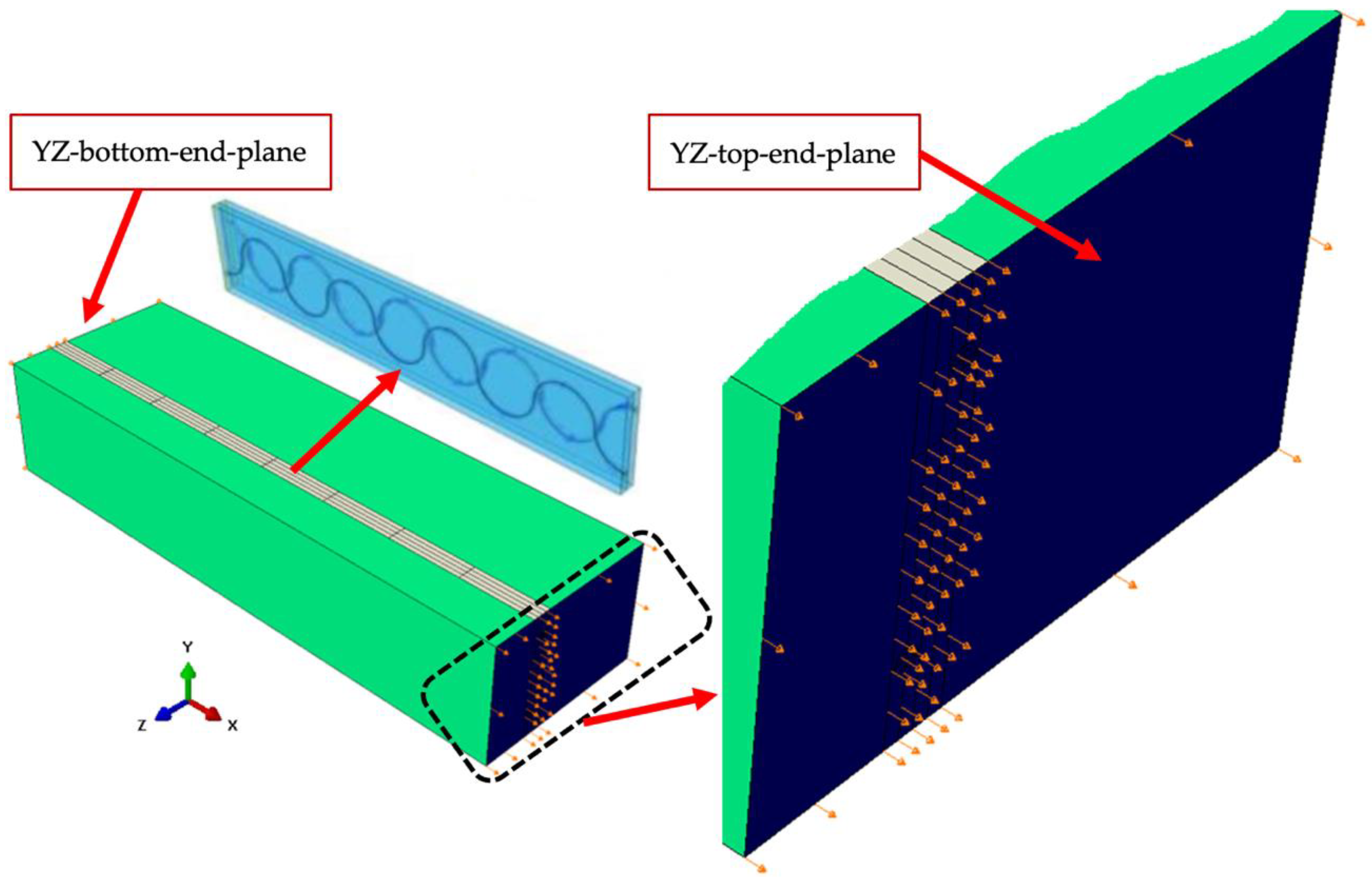
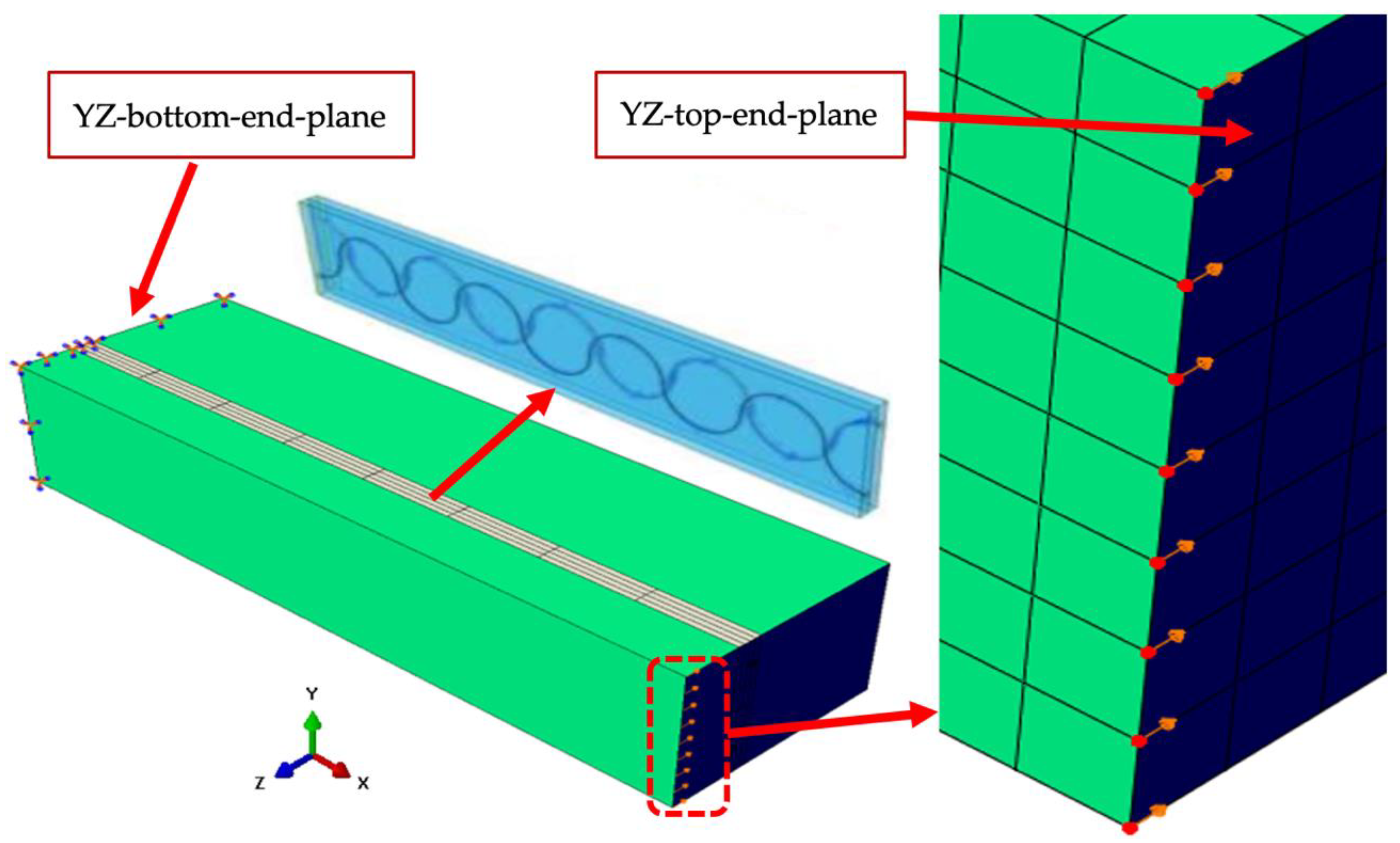
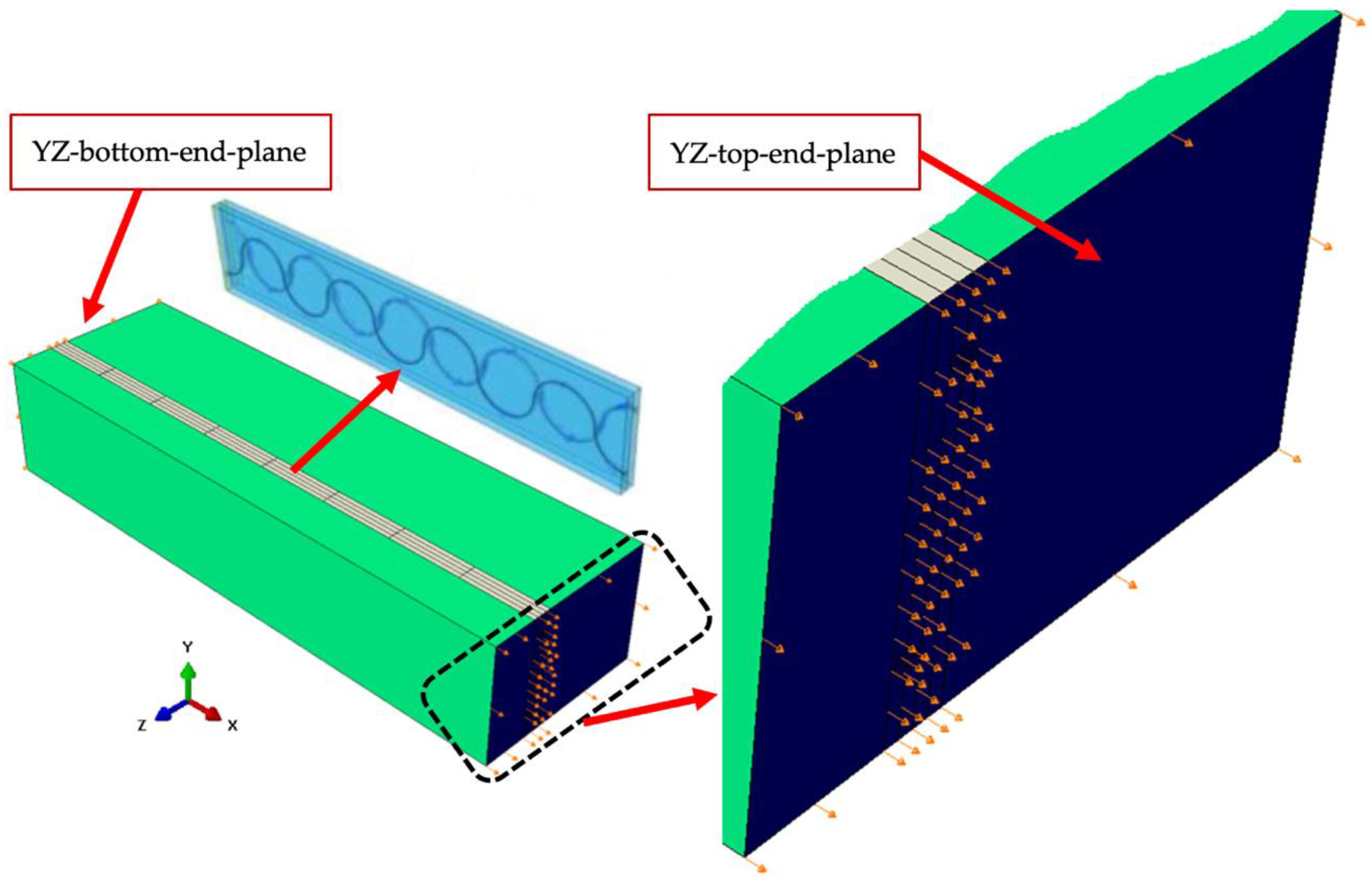
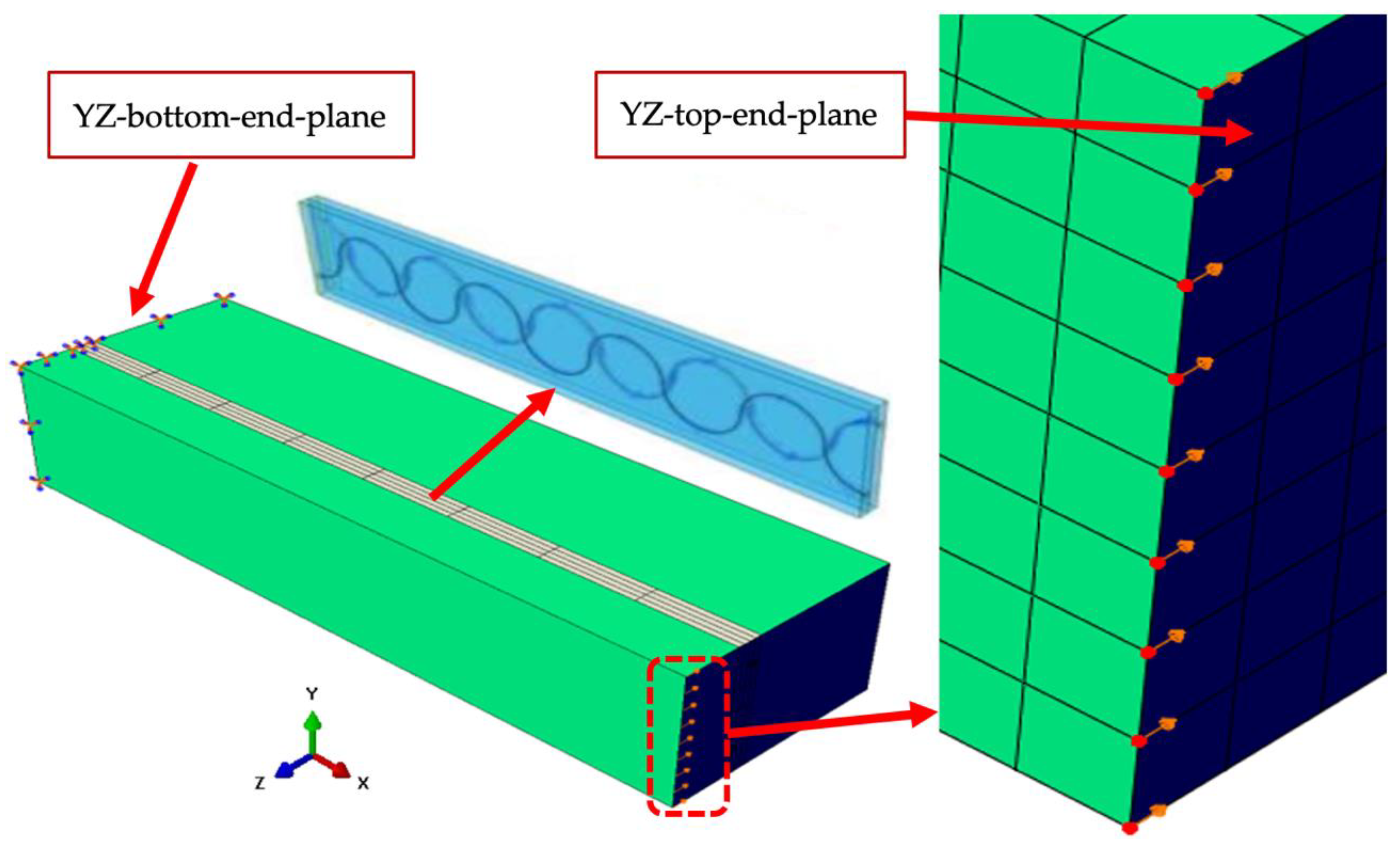
2.4. Boundary Conditions
2.4.1. Tension
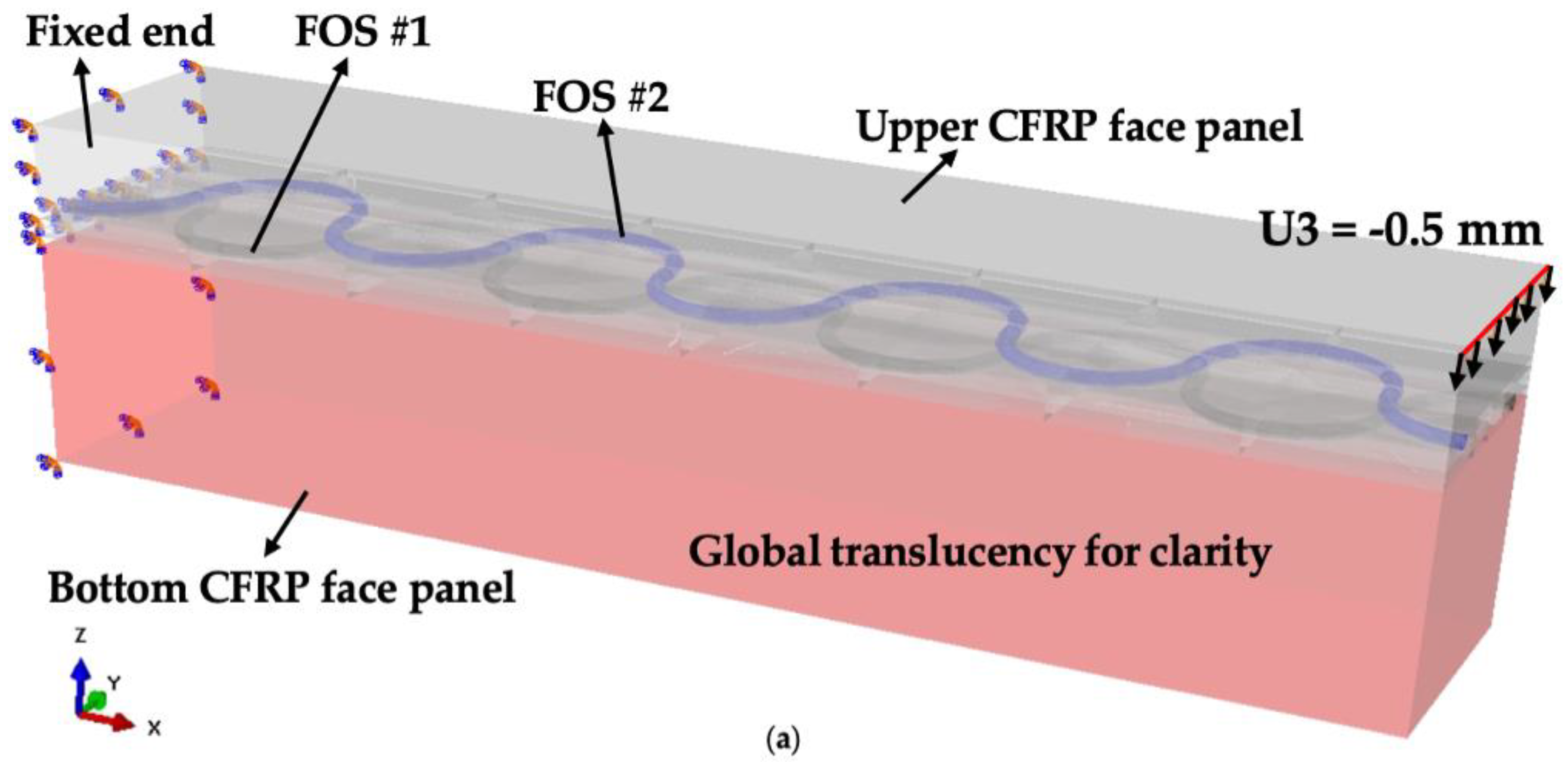
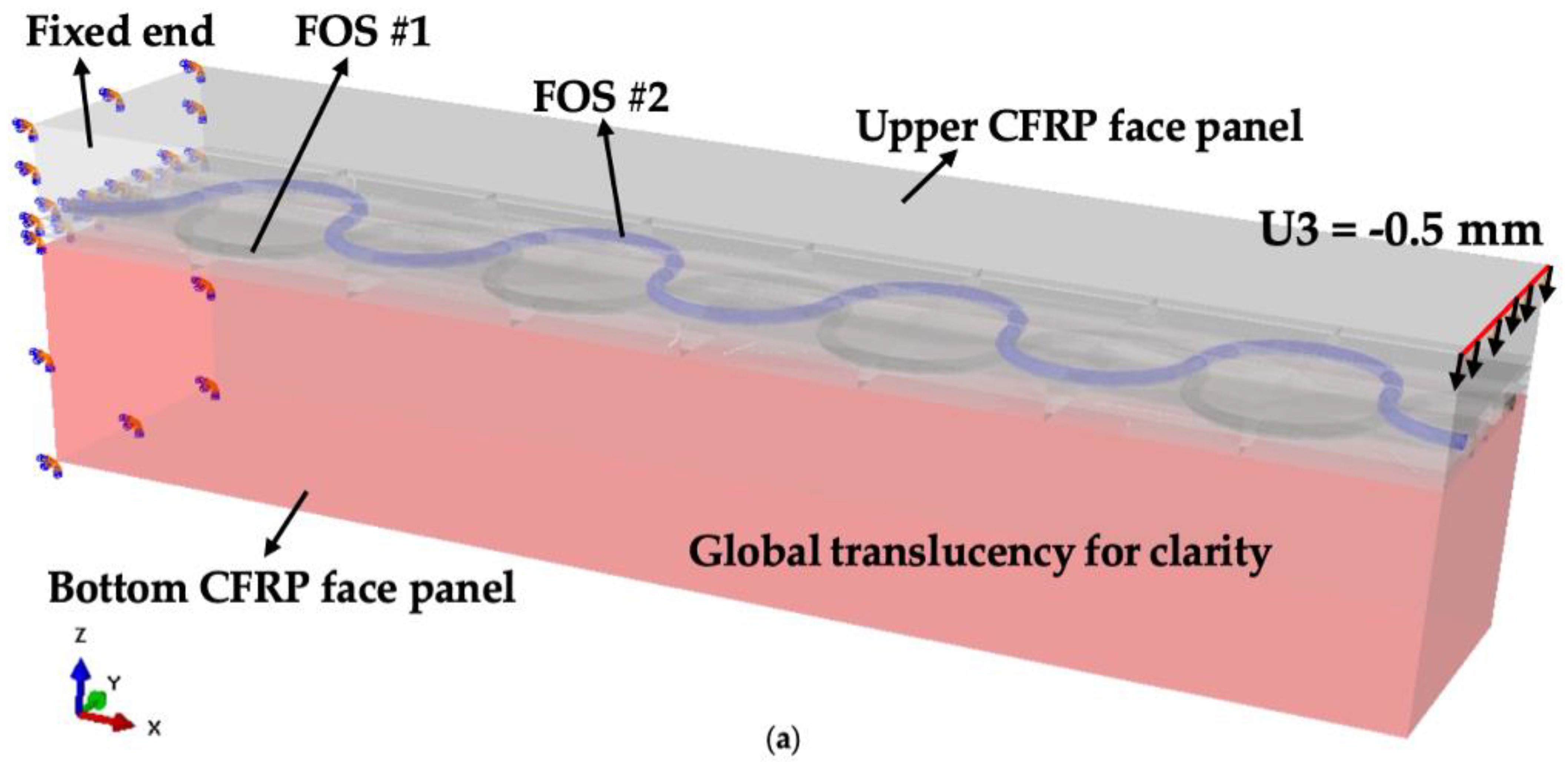
2.4.2. Cantilever Bending
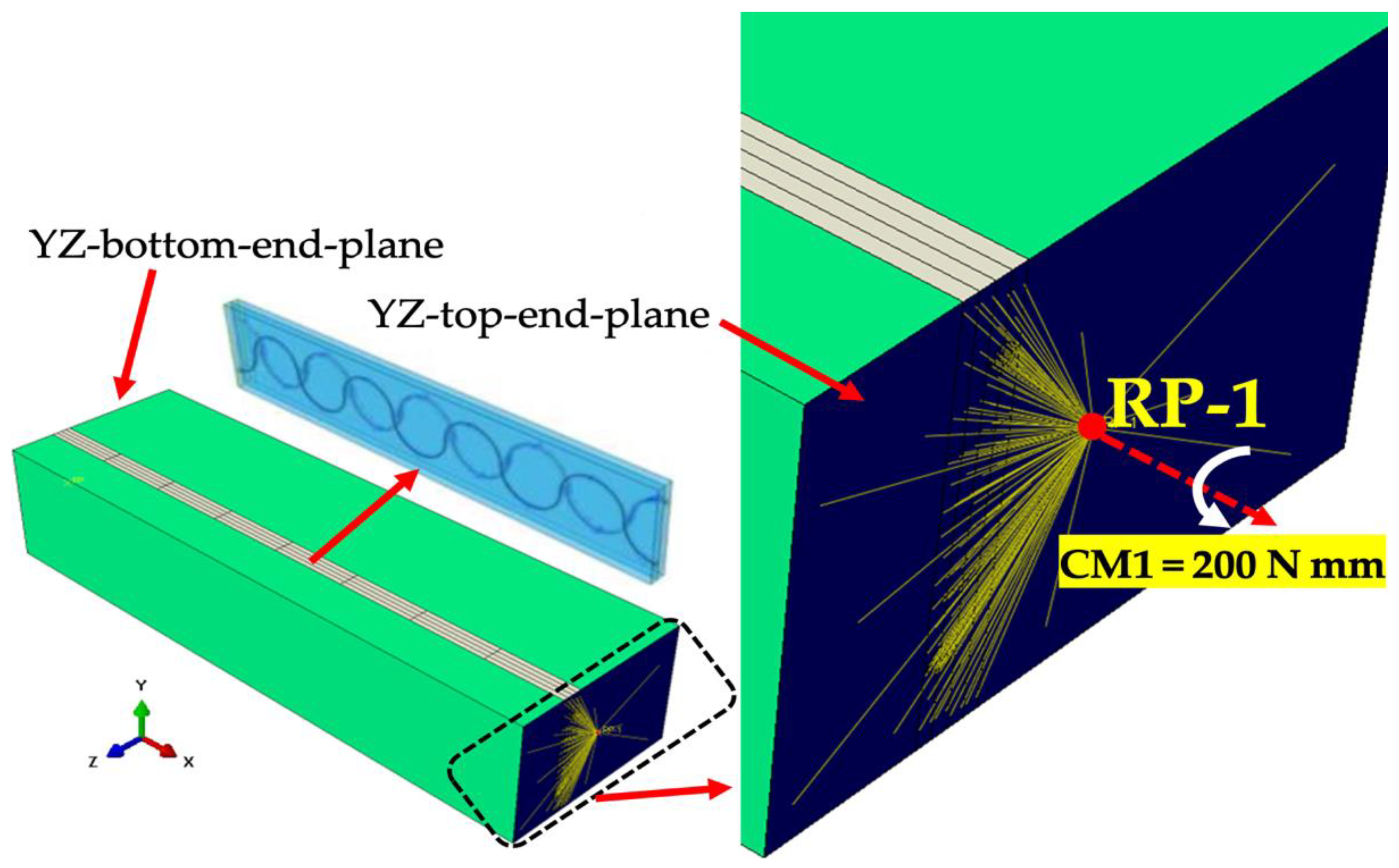
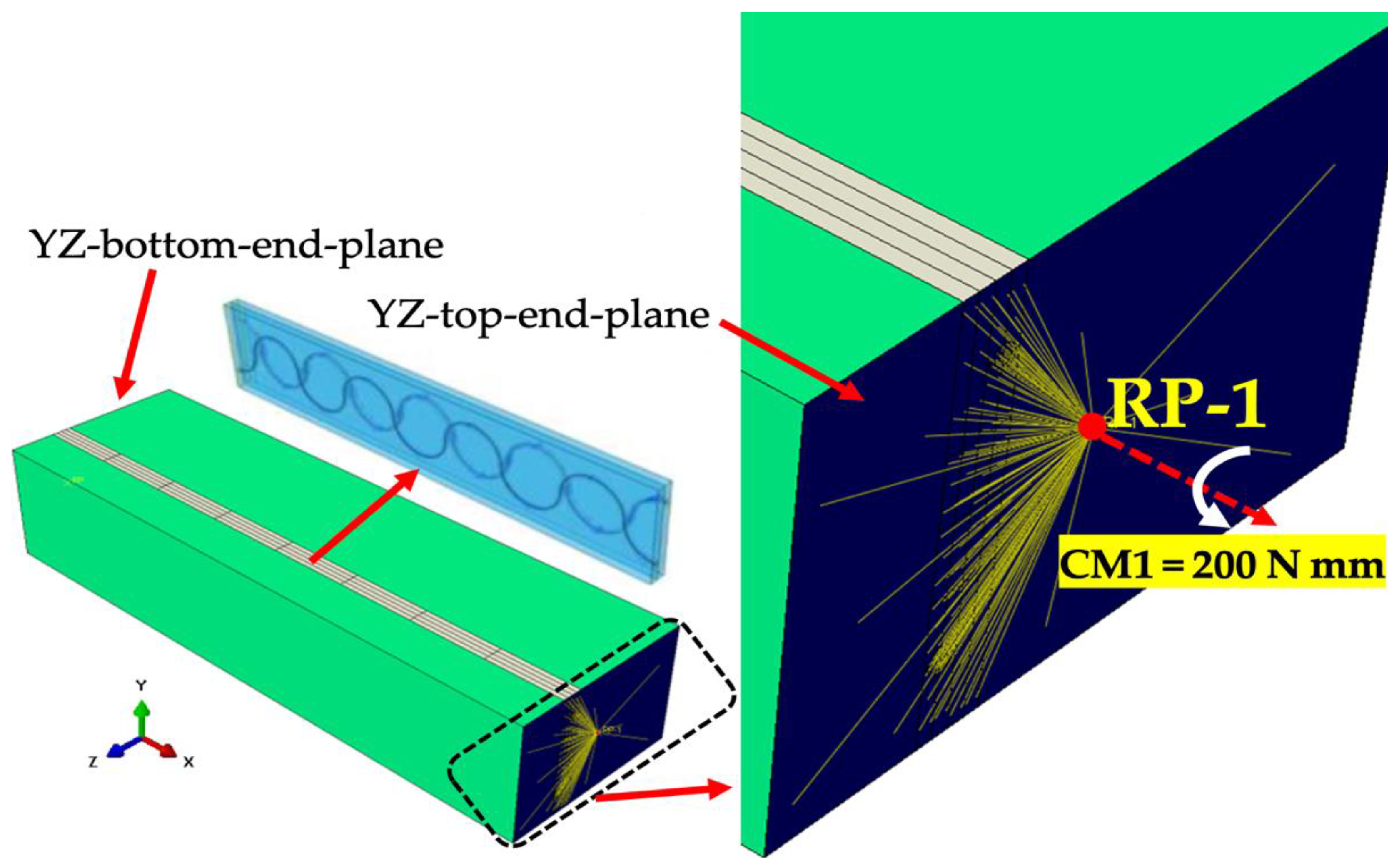
2.4.3. Torsion
3. Results and Discussion
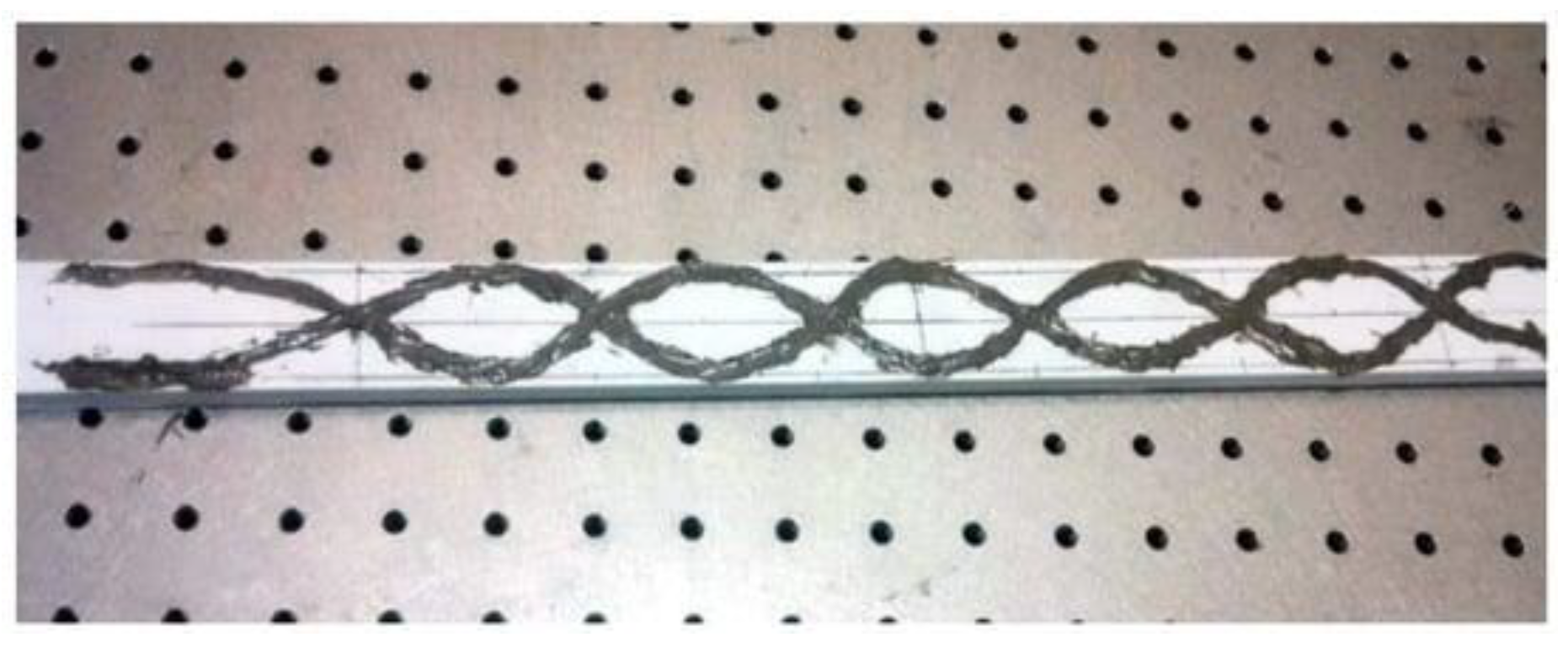
3.1. Mechanical Considerations Pertaining to Sensor Embedment
3.2. Strain Sensing Information from Numerical Results
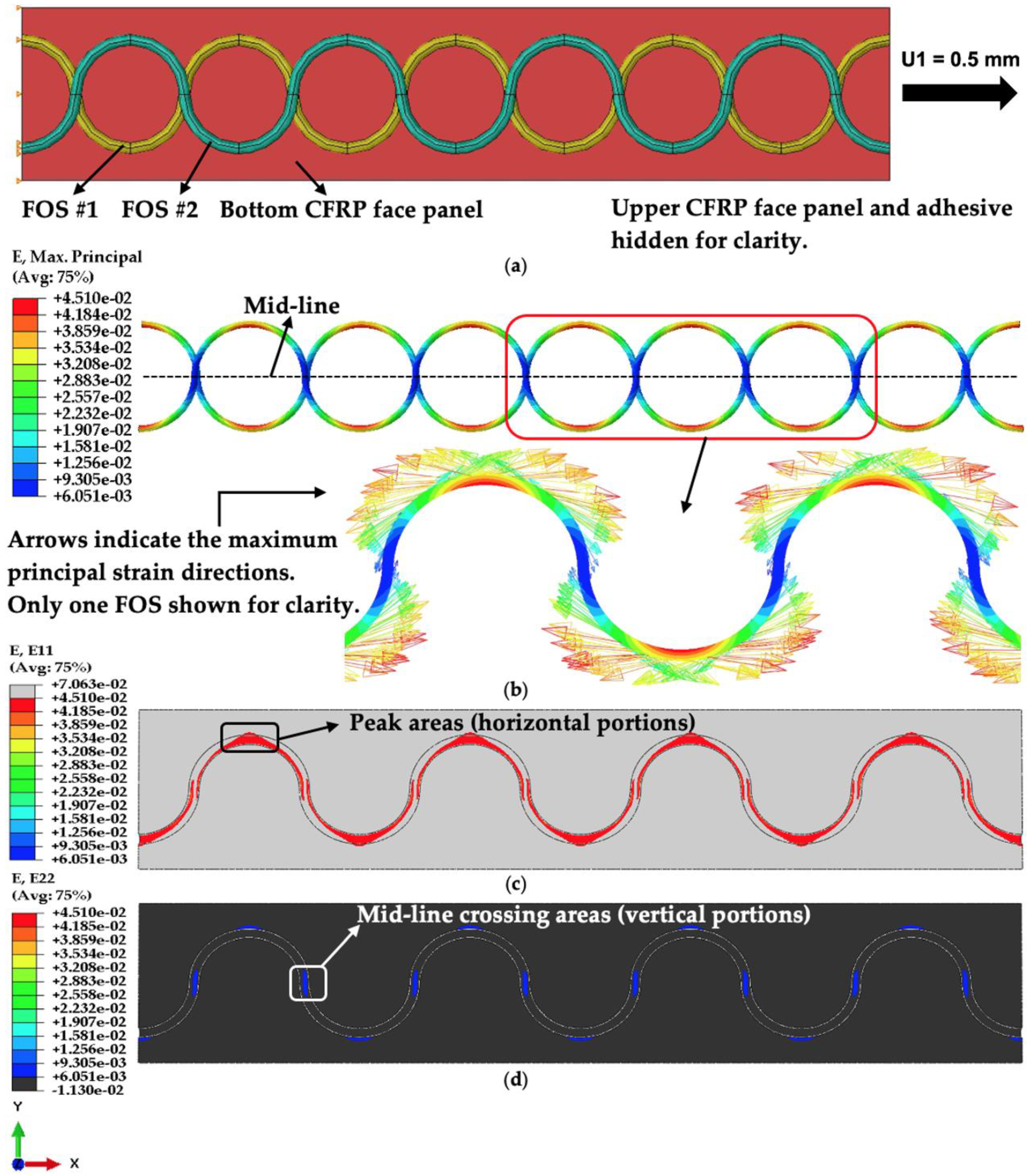
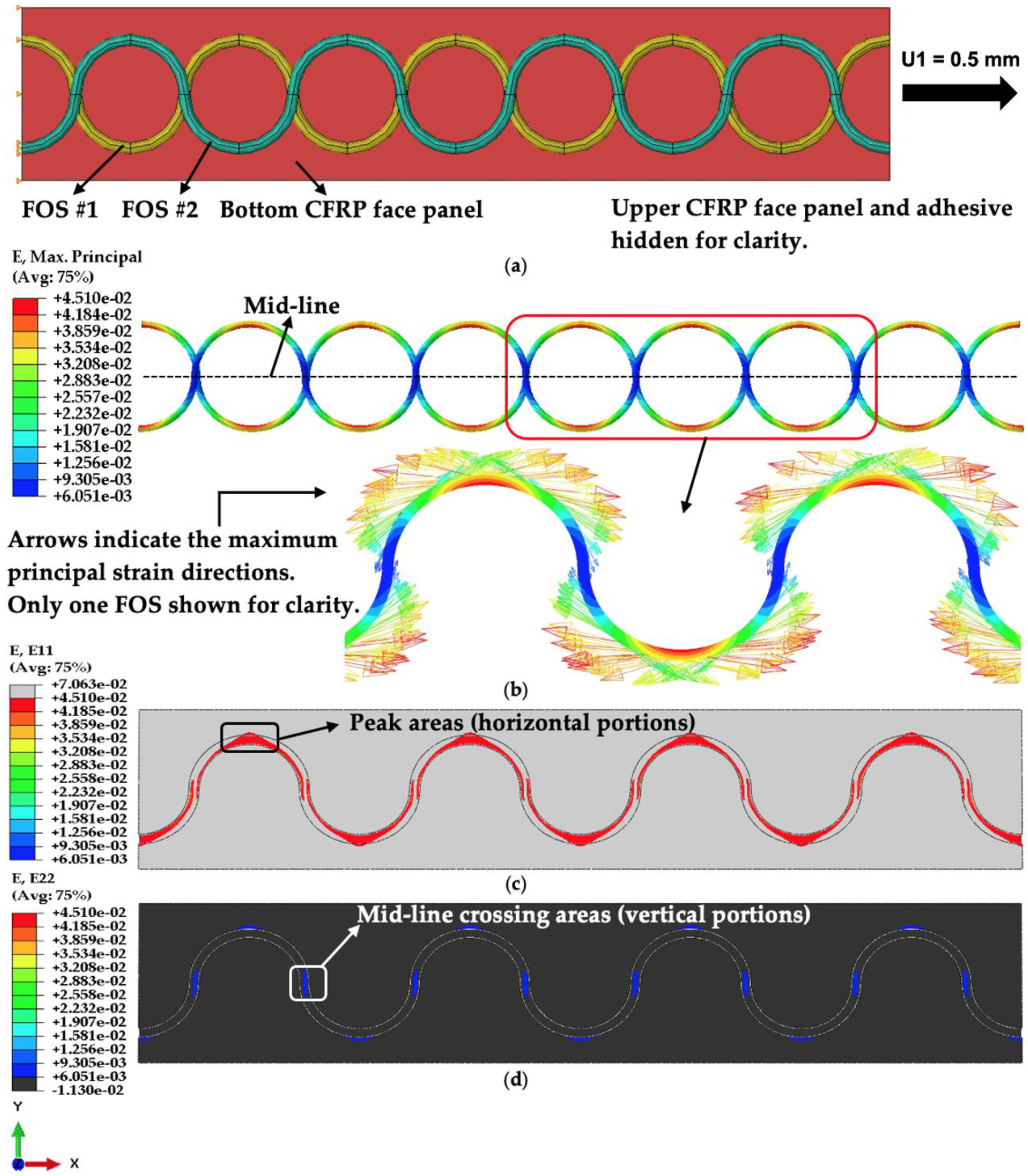
3.2.1. Tension
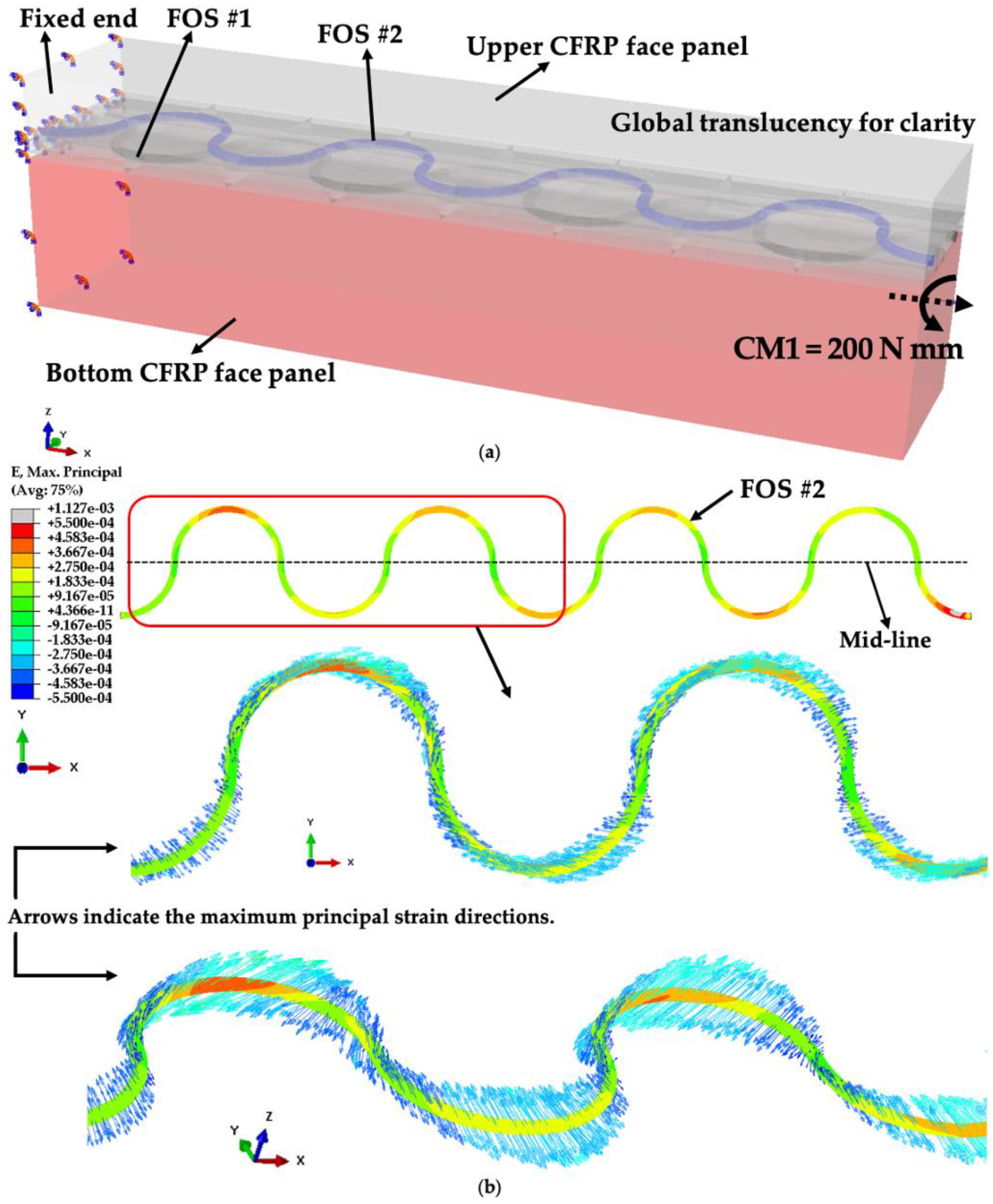
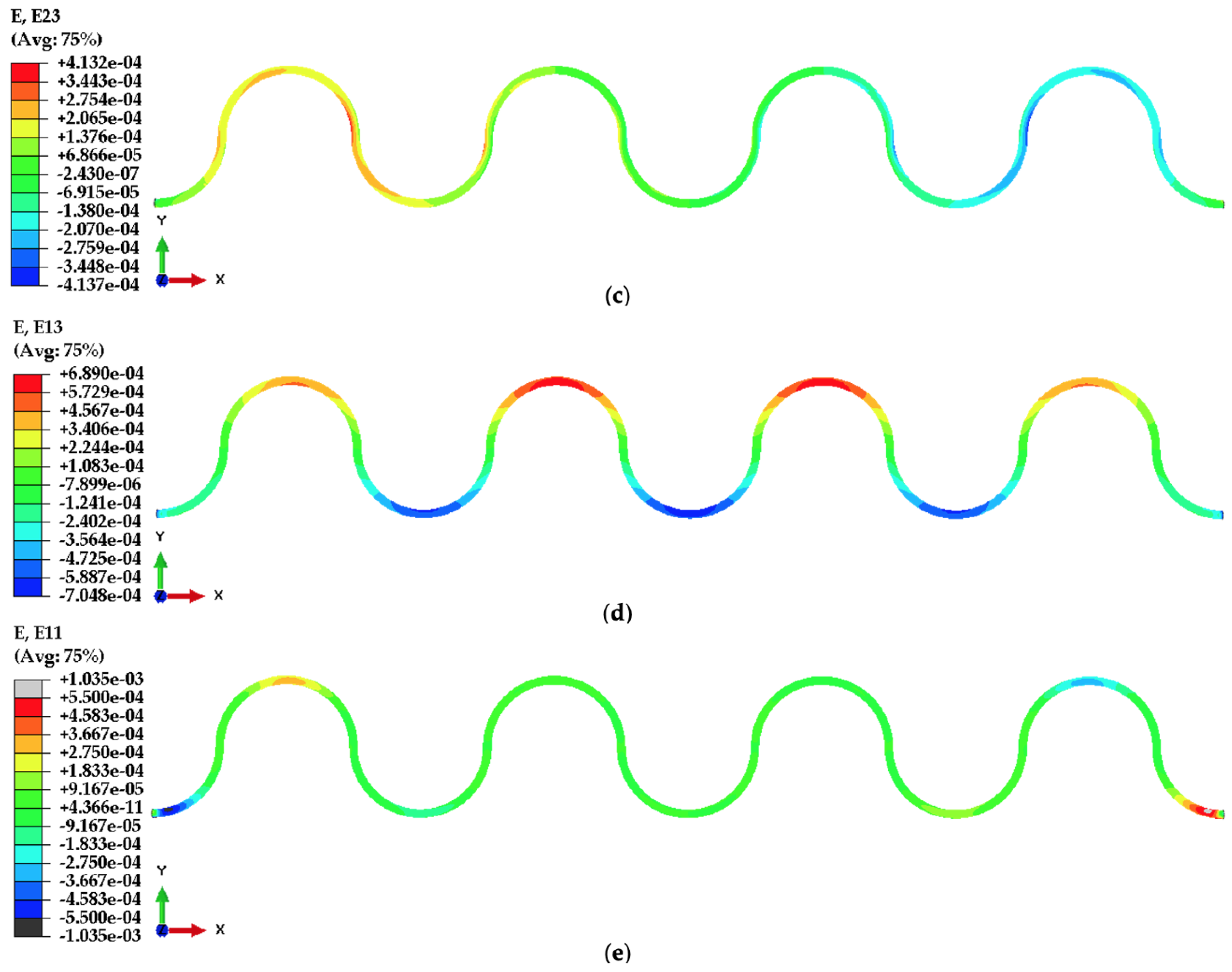
3.2.2. Cantilever Bending
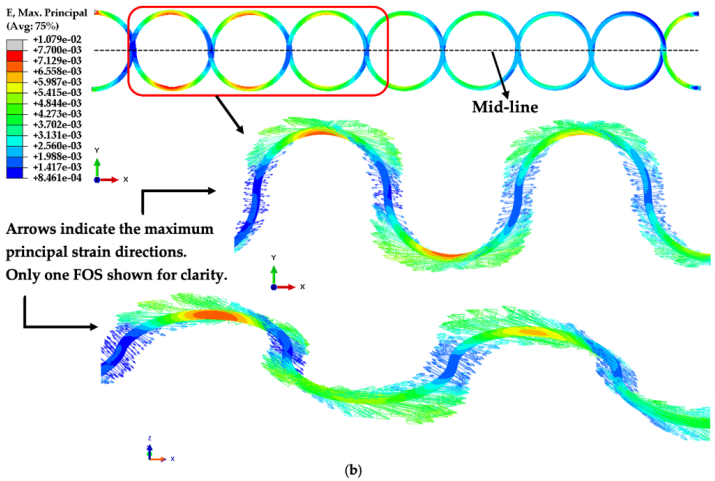
3.2.3. Torsion
3.3. Discussion
4. Conclusions
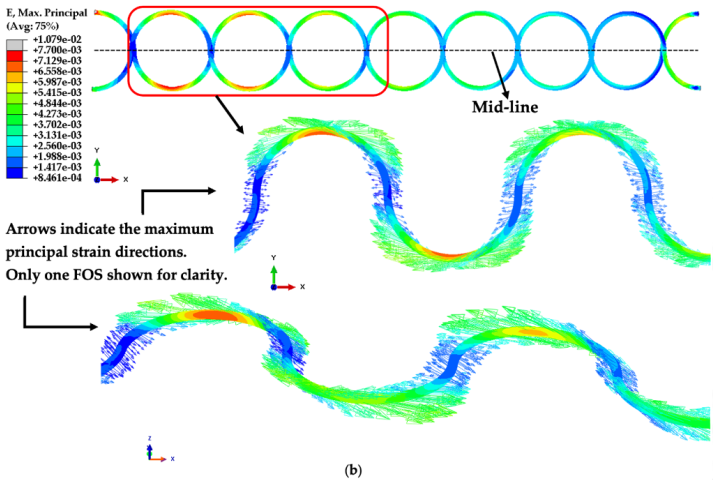
- Numerical results have helped further identify the resulting strain patterns and sensing capabilities from the optimized dual-sinusoidal placement of FOSs in three loading cases.
- Nonetheless, it is worth noting that the modeling suggested is nothing more than a proof of concept that targets the best combination of variables, which will be further applied in a more realistic project related to real smart composite structures for offshore applications.
- The responses of dual-sinusoidal FOSs under tension, bending, and torsion agree with expectations and demonstrate their strain-measuring advantages.
- On the one hand, dual-sinusoidal placement retains the multi-axial strain-sensing capability from a single-sinusoidal placement; on the other hand, it provides enlarged strain-measuring areas.
- The strain measurements along dual-sinusoidal FOSs can be readily related to the corresponding strain components of host structures if the structures are primarily under in-plane strains; if out-of-plane shear strains become dominant or comparable to in-plane strains, it becomes difficult to do so.
- Based on this research work, the following future studies are worth conducting: (1) correlations between numerical and experimental results to be further established to more accurately interpret the strains measured by FOSs and reflect the mechanical responses of host materials; (2) the three key in-plane placement parameters to be further optimized quantitatively as functions of the length and width of host composite structures by conducting parametric studies to strike a balance between their resulting mechanical influences and sensing functions; (3) the out-of-plane placement of dual-sinusoidal FOSs to be further characterized. Note also that the thickness of adhesive joints (elasto-plastic effects) and temperature play an important role in strain measurements, and they will be addressed in further studies.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Drissi-Habti, M.; Raman, V.; Khadour, A.; Timorian, S. Fiber Optic Sensor Embedment Study for Multi-Parameter Strain Sensing. Sensors 2017, 17, 667. [Google Scholar] [CrossRef] [PubMed]
- Raman, V. A Smart Composite Based on Carbon Fiber and Epoxy Matrix for New Offshore Wind-Turbines. Multi-Scale Numerical and Analytical Modelings. Ph.D. Thesis, École Centrale de Nantes, Nantes, France, 2017. [Google Scholar]
- Raman, V.; Drissi-Habti, M.; Limje, P.; Khadour, A. Finer SHM-Coverage of Inter-Plies and Bondings in Smart Composite by Dual Sinusoidal Placed Distributed Optical Fiber Sensors. Sensors 2019, 19, 742. [Google Scholar] [CrossRef]
- Drissi-Habti, M.; Abhijit, N.; Sriharsha, M.; Carvelli, V.; Bonamy, P.-J. Concept of Placement of Fiber-Optic Sensor in Smart Energy Transport Cable under Tensile Loading. Sensors 2022, 22, 2444. [Google Scholar] [CrossRef] [PubMed]
- Drissi-Habti, M.; Neginhal, A.; Manepalli, S.; Carvelli, V. Fiber-Optic Sensors (FOS) for Smart High Voltage Composite Cables—Numerical Simulation of Multi-Parameter Bending Effects Generated by Irregular Seabed Topography. Sensors 2022, 22, 7899. [Google Scholar] [CrossRef] [PubMed]
- Drissi-Habti, M.; Raman, V. Fatigue Behavior of Smart Composites with Distributed Fiber Optic Sensors for Offshore Applications. J. Compos. Sci. 2022, 6, 2. [Google Scholar] [CrossRef]
- Schreyer, F.; Luderer, G.; Rodrigues, R.; Pietzcker, R.C.; Baumstark, L.; Sugiyama, M.; Brecha, R.J.; Ueckerdt, F. Common but Differentiated Leadership: Strategies and Challenges for Carbon Neutrality by 2050 across Industrialized Economies. Environ. Res. Lett. 2020, 15, 114016. [Google Scholar] [CrossRef]
- US Department of Energy. Levelized Costs of New Generation Resources in the Annual Energy Outlook 2022; US Department of Energy: Washington, DC, USA, 2022.
- Joyce, L.; Feng, Z. Global Wind Report 2022. Available online: https://gwec.net/global-wind-report-2022/ (accessed on 15 July 2023).
- Bilgili, M.; Alphan, H. Global Growth in Offshore Wind Turbine Technology. Clean Technol. Environ. Policy 2022, 24, 2215–2227. [Google Scholar] [CrossRef]
- Mishnaevsky, L.; Branner, K.; Petersen, H.N.; Beauson, J.; McGugan, M.; Sørensen, B.F. Materials for Wind Turbine Blades: An Overview. Materials 2017, 10, 1285. [Google Scholar] [CrossRef]
- Brondsted, P.; Nijssen, R.P.L.; Goutianos, S. (Eds.) Advances in Wind Turbine Blade Design and Materials; Woodhead Publishing Series in Energy; Elsevier Editora: Amsterdam, The Netherlands, 2023. [Google Scholar]
- Raman, V.; Drissi-Habti, M.; Guillaumat, L.; Khadhour, A. Numerical Simulation Analysis as a Tool to Identify Areas of Weakness in a Turbine Wind-Blade and Solutions for Their Reinforcement. Compos. Part B Eng. 2016, 103, 23–39. [Google Scholar] [CrossRef]
- Drissi-Habti, M.; El Assami, Y.; Raman, V. Multiscale Toughening of Composites with Carbon Nanotubes—Continuous Multiscale Reinforcement New Concept. J. Compos. Sci. 2021, 5, 135. [Google Scholar] [CrossRef]
- Zhou, G.; Sim, L.M. Damage Detection and Assessment in Fibre-Reinforced Composite Structures with Embedded Fibre Optic Sensors-Review. Smart Mater. Struct. 2002, 11, 925. [Google Scholar] [CrossRef]
- Lopez-Higuera, J.M.; Rodriguez Cobo, L.; Quintela Incera, A.; Cobo, A. Fiber Optic Sensors in Structural Health Monitoring. J. Light. Technol. 2011, 29, 587–608. [Google Scholar] [CrossRef]
- He, J.; Yang, J.; Wang, Y.; Waisman, H.; Zhang, W. Probabilistic Model Updating for Sizing of Hole-Edge Crack Using Fiber Bragg Grating Sensors and the High-Order Extended Finite Element Method. Sensors 2016, 16, 1956. [Google Scholar] [CrossRef]
- Glišić, B.; Inaudi, D. Fibre Optic Methods for Structural Health Monitoring; John Wiley & Sons: Chichester, UK; Hoboken, NJ, USA, 2007; ISBN 978-0-470-06142-8. [Google Scholar]
- Di Sante, R. Fibre Optic Sensors for Structural Health Monitoring of Aircraft Composite Structures: Recent Advances and Applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef]
- Chung, D.D.L. 10—Self-Sensing Structural Composites in Aerospace Engineering. In Advanced Composite Materials for Aerospace Engineering; Rana, S., Fangueiro, R., Eds.; Woodhead Publishing: Sawston, UK, 2016; pp. 295–331. ISBN 978-0-08-100939-0. [Google Scholar]
- Lammens, N.; Luyckx, G.; Voet, E.; Van Paepegem, W.; Degrieck, J. Finite Element Prediction of Resin Pocket Geometry around Embedded Optical Fiber Sensors in Prepreg Composites. Compos. Struct. 2015, 132, 825–832. [Google Scholar] [CrossRef]
- Güemes, A.; Fernández-López, A.; Díaz-Maroto, P.F.; Lozano, A.; Sierra-Perez, J. Structural Health Monitoring in Composite Structures by Fiber-Optic Sensors. Sensors 2018, 18, 1094. [Google Scholar] [CrossRef] [PubMed]
- Hartog, A.H. An Introduction to Distributed Optical Fibre Sensors; CRC Press: Boca Raton, FL, USA, 2017; ISBN 978-1-315-11901-4. [Google Scholar]
- Grattan, K.T.V.; Sun, T. Fiber Optic Sensor Technology: An Overview. Sens. Actuators Phys. 2000, 82, 40–61. [Google Scholar] [CrossRef]
- Bergmayr, T.; Winklberger, M.; Kralovec, C.; Schagerl, M. Structural Health Monitoring of Aerospace Sandwich Structures via Strain Measurements along Zero-Strain Trajectories. Eng. Fail. Anal. 2021, 126, 105454. [Google Scholar] [CrossRef]
- Janetzko-Preisler, A.; Wolf-Monheim, F.; Souschek, R.; Kaiser, D.; Wojtczyk, R.; Dafnis, A.; Schröder, K.-U.; David, W.; Zandbergen, P. Integration and Evaluation of a Meander-Shaped Fibre-Optical Sensor in a GFRP Leaf Spring. MATEC Web Conf. 2021, 349, 3013. [Google Scholar] [CrossRef]
- Palmieri, L.; Schenato, L. Distributed Optical Fiber Sensing Based on Rayleigh Scattering. Open Opt. J. 2013, 7, 104–127. [Google Scholar] [CrossRef]
- Shivakumar, K.; Emmanwori, L. Mechanics of Failure of Composite Laminates with an Embedded Fiber Optic Sensor. J. Compos. Mater. 2004, 38, 669–680. [Google Scholar] [CrossRef]
- Available online: https://www.3ds.com/support/hardware-and-software/simulia-system-information/abaqus-2021/ (accessed on 28 July 2023).
- Murayama, H.; Kageyama, K.; Uzawa, K.; Ohara, K.; Igawa, H. Strain Monitoring of a Single-Lap Joint with Embedded Fiber-Optic Distributed Sensors. Struct. Health Monit. 2012, 11, 325–344. [Google Scholar] [CrossRef]
- Canal, L.P.; Sarfaraz, R.; Violakis, G.; Botsis, J.; Michaud, V.; Limberger, H.G. Monitoring Strain Gradients in Adhesive Composite Joints by Embedded Fiber Bragg Grating Sensors. Compos. Struct. 2014, 112, 241–247. [Google Scholar] [CrossRef]
- Drissi-Habti, M.; Nakano, K. The Modelling of Shear Stress Transfer in Hi-Nicalonα-Si3N4 Ceramic-Matrix Composites by the Use of Micro-Indentation Tests. Compos. Sci. Technol. 1997, 57, 1381–1389. [Google Scholar] [CrossRef]
- Matine, A.; Drissi-Habti, M. On-Coupling Mechanical, Electrical and Thermal Behavior of Submarine Power Phases. Energies 2019, 12, 1009. [Google Scholar] [CrossRef]
- Sam-Daliri, O.; Faller, L.M.; Farahani, M.; Zangl, H. Structural health monitoring of adhesive joints under pure mode I loading using the electrical impedance measurement. Eng. Fract. Mech. 2021, 245, 107585. [Google Scholar] [CrossRef]
- Sam-Daliri, O.; Farahani, M.; Faller, L.M.; Zangl, H. Structural health monitoring of defective single lap adhesive joints using graphene nanoplatelets. J. Manuf. Process. 2020, 55, 119–130. [Google Scholar] [CrossRef]
- Yang, M.; Liu, Q.; Naqawe, H.S.; Fok, M.P. Movement detection in soft robotic gripper using sinusoidally embedded fiber optic sensor. Sensors 2020, 20, 1312. [Google Scholar] [CrossRef]
- Mekid, S.; Butt, A.M.; Qureshi, K. Integrity assessment under various conditions of embedded fiber optics based multi-sensing materials. Opt. Fiber Technol. 2017, 36, 334–343. [Google Scholar] [CrossRef]
- Gholamzadeh, B.; Nabovati, H. Fiber optic sensors. Int. J. Electron. Commun. Eng. 2008, 2, 1107–1117. [Google Scholar]
- Floris, I.; Adam, J.M.; Calderón García, P.A.; Sales Maicas, S. Fiber Optic Shape Sensors: A comprehensive review. Opt. Lasers Eng. 2021, 139, 1–17. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Modulus (MPa) | Poisson’s Ratio |
|---|---|---|
| CFRP lamina | E1 = 103,000; E2 = 10,400; G12 = 54,000 | ν12 = 0.3; ν21 = 0.03 |
| Epoxy resin | 3500 | 0.3 |
| Acrylate | 2700 | 0.35 |
| Silica glass | 72,000 | 0.17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, H.; Drissi-Habti, M.; Carvelli, V. New Concept of Dual-Sinusoid Distributed Fiber-Optic Sensors Antiphase-Placed for the SHM of Smart Composite Structures for Offshore. Appl. Sci. 2024, 14, 932. https://doi.org/10.3390/app14020932
Su H, Drissi-Habti M, Carvelli V. New Concept of Dual-Sinusoid Distributed Fiber-Optic Sensors Antiphase-Placed for the SHM of Smart Composite Structures for Offshore. Applied Sciences. 2024; 14(2):932. https://doi.org/10.3390/app14020932
Chicago/Turabian StyleSu, Hao, Monssef Drissi-Habti, and Valter Carvelli. 2024. "New Concept of Dual-Sinusoid Distributed Fiber-Optic Sensors Antiphase-Placed for the SHM of Smart Composite Structures for Offshore" Applied Sciences 14, no. 2: 932. https://doi.org/10.3390/app14020932
APA StyleSu, H., Drissi-Habti, M., & Carvelli, V. (2024). New Concept of Dual-Sinusoid Distributed Fiber-Optic Sensors Antiphase-Placed for the SHM of Smart Composite Structures for Offshore. Applied Sciences, 14(2), 932. https://doi.org/10.3390/app14020932